WO2013076978A1 - 画像処理方法および画像処理装置 - Google Patents
画像処理方法および画像処理装置 Download PDFInfo
- Publication number
- WO2013076978A1 WO2013076978A1 PCT/JP2012/007473 JP2012007473W WO2013076978A1 WO 2013076978 A1 WO2013076978 A1 WO 2013076978A1 JP 2012007473 W JP2012007473 W JP 2012007473W WO 2013076978 A1 WO2013076978 A1 WO 2013076978A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- parameter
- value
- block
- unit
- image processing
- Prior art date
Links
Images












































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/80—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation
- H04N19/82—Details of filtering operations specially adapted for video compression, e.g. for pixel interpolation involving filtering within a prediction loop
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/85—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression
- H04N19/86—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using pre-processing or post-processing specially adapted for video compression involving reduction of coding artifacts, e.g. of blockiness
Definitions
- the present invention relates to an image processing method and an image processing apparatus that perform image filtering using a deblocking filter.
- the hybrid moving image encoding process is not limited to the ISO / IEC standards (MPEG-X standards such as MPEG-1, MPEG-2 and MPEG-4) but also the ITU-T standards (H.261 and H.263, etc.). .26X standard).
- a video signal indicating an image sequence composed of a series of frames is input to a moving image encoding apparatus that performs hybrid moving image encoding processing.
- an input image (frame) is divided into a plurality of blocks, and the encoding process is performed in units of the divided blocks.
- the block having the maximum size is referred to as a maximum coding unit LCU (Large Coding Unit).
- the size of the maximum encoding unit LCU is, for example, 64 ⁇ 64 pixels in HEVC.
- an LCU is further divided into coding units CU (coding unit) such as 16 ⁇ 16 pixels, and an image is coded in units of CUs.
- the coding unit CU may be divided into a smaller size prediction unit PU (Prediction Unit) and a transform unit TU (Transform Unit).
- PU Prediction Unit
- TU Transform Unit
- the block size may vary depending on the type of image content.
- the encoding method may be different for each block.
- Block noise is particularly prominent when coarse quantization is performed in the quantization process. Such block noise has a negative effect on human visual perception. That is, block noise reduces image quality.
- H As a method for reducing block noise, for example, H.
- the deblocking filter is used for the reconstructed image referred to in the prediction process.
- JCT-VC “WD3: Working Draft 3, of High-Efficiency Video Coding”, JCTVC-E603, March 2011, section 8.6.1.
- JCT-VC “Common test conditions and software reference configurations”, JCTVC-F900, July 2011.
- JCT-VC “WD4: Working Draft 4 of High-Efficiency Video Coding”, JCTVC-F803_d2, July 2011.
- An object of the present invention is to provide an image processing method and an image processing apparatus that perform a filtering process using a deblocking filter that can increase and reduce the adaptability to block noise.
- an image processing method for performing filtering processing on an image block using a plurality of deblocking filters having different filter strengths.
- a first parameter calculating step for calculating a first parameter indicating a boundary strength between image blocks; and a second parameter for calculating a second parameter indicating a limit value of the deblocking filter based on the first parameter and the quantization parameter.
- the adaptability to block noise can be further increased in an image processing method and an image processing apparatus using a deblocking filter.
- FIG. 1 is a block diagram illustrating a configuration example of the moving picture coding apparatus according to the first embodiment.
- FIG. 2A is a diagram illustrating an example of two encoded block units CU adjacent in the horizontal direction.
- FIG. 2B is a diagram illustrating an example of two encoded block units CU adjacent in the vertical direction.
- FIG. 3A is a diagram illustrating an example of pixel values in two encoded block units CU adjacent in the horizontal direction.
- 3B is a diagram illustrating a more detailed example of the adjacent block A and the processing target block B illustrated in FIG. 2A.
- FIG. 4A is a diagram illustrating a processing procedure of filtering processing in the comparative example.
- FIG. 4B is a diagram illustrating two blocks adjacent in the horizontal direction.
- FIG. 4C is a diagram showing two blocks adjacent in the vertical direction.
- FIG. 5 is a flowchart showing a processing procedure for calculating the boundary strength BS in the comparative example.
- FIG. 6 is a block diagram illustrating a configuration example of a deblocking filter processing unit of the video encoding device in the embodiment.
- FIG. 7A is a diagram illustrating a processing procedure of filtering processing in the embodiment.
- FIG. 7B is a diagram illustrating two blocks adjacent in the horizontal direction.
- FIG. 7C is a diagram showing two blocks adjacent in the vertical direction.
- FIG. 8 is a flowchart illustrating a processing procedure for calculating the boundary strength BS and setting the offset value t c _offset of the threshold value t c in the embodiment.
- FIG. 8 is a flowchart illustrating a processing procedure for calculating the boundary strength BS and setting the offset value t c _offset of the threshold value t c in the embodiment.
- FIG. 9A is a diagram illustrating an example of pixels used for strong filtering.
- FIG. 9B is a diagram illustrating an example of pixels that are filtered by strong filtering.
- FIG. 10A is a diagram illustrating an example of pixels used in weak filtering.
- FIG. 10B is a diagram illustrating an example of pixels that are filtered by weak filtering.
- FIG. 11 is a flowchart showing a processing procedure for calculating the boundary strength BS and setting the offset value t c _offset of the threshold value t c in the comparative example.
- FIG. 12A is a diagram illustrating the coding efficiency of the comparative example and the coding efficiency of the embodiment.
- FIG. 12B is a diagram illustrating the coding efficiency of the comparative example and the coding efficiency of the embodiment.
- FIG. 12A is a diagram illustrating the coding efficiency of the comparative example and the coding efficiency of the embodiment.
- FIG. 13 is a flowchart showing a processing procedure for calculating the boundary strength BS in the first modification.
- FIG. 14 is a diagram illustrating the coding efficiency of the comparative example and the coding efficiency of the embodiment.
- FIG. 15 is a diagram illustrating a setting example of the threshold value t c in the first modification.
- FIG. 16 is a diagram illustrating a setting example of the threshold value t c in the second modification.
- FIG. 17 is a diagram illustrating a setting example of the threshold value t c in the third modification.
- FIG. 18A is a diagram illustrating a processing procedure of filtering processing in the fourth modification.
- FIG. 18B is a diagram illustrating a setting example of the threshold value t c in the fourth modification.
- FIG. 19 is a block diagram illustrating a configuration example of the moving picture decoding apparatus according to the second embodiment.
- FIG. 20 is a block diagram illustrating a configuration example of the moving picture coding apparatus according to the second embodiment.
- FIG. 21 is an overall configuration diagram of a content supply system that realizes a content distribution service.
- FIG. 22 is an overall configuration diagram of a digital broadcasting system.
- FIG. 23 is a block diagram illustrating a configuration example of a television.
- FIG. 24 is a block diagram illustrating a configuration example of an information reproducing / recording unit that reads and writes information from and on a recording medium that is an optical disk.
- FIG. 25 is a diagram illustrating a structure example of a recording medium that is an optical disk.
- FIG. 26A illustrates an example of a mobile phone.
- FIG. 26A illustrates an example of a mobile phone.
- FIG. 26B is a block diagram illustrating a configuration example of a mobile phone.
- FIG. 27 is a diagram showing a structure of multiplexed data.
- FIG. 28 is a diagram schematically showing how each stream is multiplexed in the multiplexed data.
- FIG. 29 is a diagram showing in more detail how the video stream is stored in the PES packet sequence.
- FIG. 30 is a diagram illustrating the structure of TS packets and source packets in multiplexed data.
- FIG. 31 is a diagram illustrating a data structure of the PMT.
- FIG. 32 shows the internal structure of multiplexed data information.
- FIG. 33 shows the internal structure of stream attribute information.
- FIG. 34 is a diagram showing steps for identifying video data.
- FIG. 27 is a diagram showing a structure of multiplexed data.
- FIG. 28 is a diagram schematically showing how each stream is multiplexed in the multiplexed data.
- FIG. 29 is a diagram showing in more detail how
- FIG. 35 is a block diagram illustrating a configuration example of an integrated circuit that realizes the moving picture coding method and the moving picture decoding method according to each embodiment.
- FIG. 36 is a diagram showing a configuration for switching the driving frequency.
- FIG. 37 is a diagram showing steps for identifying video data and switching between driving frequencies.
- FIG. 38 is a diagram showing an example of a look-up table in which video data standards are associated with drive frequencies.
- FIG. 39A is a diagram illustrating an example of a configuration for sharing a module of a signal processing unit.
- FIG. 39B is a diagram illustrating another example of a configuration for sharing a module of a signal processing unit.
- a video encoding apparatus In a hybrid video encoding process, a video encoding apparatus generally performs prediction processing to generate predicted image data, and performs conversion processing on residual image data between input image data and predicted image data. Alternatively, quantization processing or both are executed.
- the prediction process generally, spatial prediction or temporal prediction is used.
- spatial prediction prediction is performed using spatially close blocks among already encoded blocks.
- temporal prediction prediction is performed using blocks that are temporally close among already encoded blocks.
- prediction residual data (prediction residual block) is converted from a spatial (pixel) region to a frequency region, and a conversion coefficient is generated. The purpose of this transformation is to reduce the correlation of the input blocks.
- the transform coefficient is quantized to generate a quantized coefficient.
- the quantization is performed by irreversible compression.
- a moving image encoding device generates an encoded video signal by performing entropy encoding on a quantized coefficient, and further compressing (reversibly compressing) the already compressed quantized coefficient. To do.
- the moving image encoding apparatus encodes decoding control information necessary for decoding the encoded bitstream. This decoding control information is, for example, information related to spatial prediction and / or temporal prediction, quantization amount, and the like.
- the moving image encoding device generates an encoded bit stream including an encoded video signal and decoding control information.
- FIG. 1 is a block diagram illustrating a configuration example of a moving image encoding apparatus using H.264 / MPEG-4 AVC or HEVC.
- the moving image encoding apparatus 100 includes a subtraction unit 105, a conversion unit 110, a quantization unit 120, an inverse quantization / inverse conversion unit 130, an addition unit 140, a deblocking filter processing unit 150, a sample adaptation.
- An offset processing unit 155, an adaptive loop filter processing unit 165, a frame memory 170, a prediction unit 180, and an entropy encoding unit 190 are provided.
- the subtractor 105 subtracts predicted image data (predicted image signal s5) corresponding to the encoding target block from the input image data of the encoding target block included in the input signal s0 for each block. Prediction error data (prediction error signal e0) is generated.
- the conversion unit 110 performs conversion from the image domain to the frequency domain on the generated prediction error data (prediction error signal e0).
- the quantization unit 120 performs a quantization process on the prediction error data (prediction error signal e1) converted into the frequency domain, and calculates a quantization coefficient.
- the quantization unit 120 converts the prediction error data using a two-dimensional discrete cosine transform (DCT).
- DCT discrete cosine transform
- the quantization coefficients calculated by DCT tend to concentrate on low frequency components.
- the quantization unit 120 may convert the prediction error data using integer conversion or the like.
- the inverse quantization / inverse transform unit 130 performs an inverse quantization process on the prediction error data (prediction error signal e2) quantized by the quantization unit 120, and further performs an inverse conversion from the frequency domain to the image domain. Perform the conversion process. Note that the prediction error signal e3 is different from the original prediction error signal e0 due to the influence of a quantization error also called quantization noise in the quantization process.
- the adder 140 performs prediction image data (prediction image signal s5) and prediction error data (prediction error) subjected to inverse quantization processing and inverse transformation processing by the inverse quantization / inverse transformation unit 130 for each encoding target block.
- the reconstructed image data (reconstructed image signal s1) is generated by adding the signal e3).
- the deblocking filter processing unit 150 performs a filtering process on the reconstructed image data (reconstructed image signal s1).
- the deblocking filter processing unit 150 performs a filtering process on the CU edge, the PU edge, and the TU edge.
- the CU edge means an edge caused by block noise or the like in quantization processing at the boundary between two adjacent coding units CU.
- an edge at the boundary between two prediction units (PU) is referred to as a PU edge
- an edge at the boundary between two transform units (TU) is referred to as a TU edge.
- the deblocking filter processing unit 150 includes a plurality of deblocking filters having different strengths and a filter control unit that controls the plurality of deblocking filters.
- the deblocking filter processing unit 150 includes two types of narrowband and wideband deblocking filters.
- H.M. In H.264 / MPEG-4AVC, when block noise is large, a strong (narrow band) low-pass filter is used as a deblocking filter.
- a weak (broadband) low-pass filter is used as the deblocking filter.
- the strength of the low-pass filter is determined by the prediction signal s ′ and the quantized prediction error signal e ′.
- the deblocking filter generally smoothes the block edge, the subjective quality of the decoded image is improved. Furthermore, since the reconstructed image data (reconstructed image signal s2) after the filtering process is used to generate predicted image data by motion compensation in the prediction unit 180, the prediction error of the predicted image data is reduced. Therefore, the encoding efficiency is improved.
- the sample adaptive offset processing unit 155 provides processing for giving an offset value for approximating the original pixel value in units of pixels to the reconstructed image data (reconstructed image signal s2) filtered by the deblocking filter processing unit 150. I do.
- the adaptive loop filter processing unit 165 includes an adaptive loop filter, and performs processing for compensating image distortion caused by compression on the reconstructed image data (reconstructed image signal s3) output from the sample adaptive offset processing unit 155. Do.
- a Wiener filter having a filter coefficient determined so as to minimize the mean square error between the reconstructed image signal s1 and the input image signal S0 is generally used.
- the sample adaptive offset processing unit 155 and the adaptive loop filter processing unit 165 can improve the adaptability with respect to the original image in units of pixels, and can improve the quality.
- reconstructed image data to which the adaptive loop filter is applied (reconstructed image signal s4) is stored in units of frames.
- the prediction unit 180 includes an intra prediction unit that generates a predicted image using spatial prediction (intra prediction) and an inter prediction unit that generates a predicted image using temporal prediction (inter prediction). ing.
- the prediction unit 180 can change the prediction type for each frame or block.
- the intra prediction unit generates intra prediction image data of the encoding target block by performing intra prediction using the reconstructed image data in units of blocks stored in the frame memory 170.
- the inter prediction unit performs inter prediction using the reconstructed image data in units of frames stored in the frame memory 170 and the motion vector derived by motion detection or the like, thereby performing inter prediction image data of the block to be encoded. Is generated.
- the motion vector may be determined by the resolution of a spatial subpixel such as 1 ⁇ 2 pixel or 1 ⁇ 4 pixel.
- the entropy encoding unit 190 generates an encoded bitstream by performing variable length encoding processing on the prediction error data (prediction error signal e2).
- variable-length encoding process for example, encoding is performed using a run-length code. The amount of data is further reduced by the variable length encoding process.
- the filtering process using the deblocking filter includes a control process for setting a filter and a filtering process for executing a process on the encoding target block CU in accordance with the setting of the control process.
- the control process includes (1) a process for determining whether or not to execute a filtering process, and (2) a process for selecting a deblocking filter to be used.
- the selection process includes calculation of each parameter that defines the operation of the deblocking filter, for example, calculation of t c indicating the limit range of the filter process.
- the filtering process using the deblocking filter is applied to the edge of the block boundary due to block noise, and not applied to the edge of the input image that is not block noise. This is because, for example, if a filtering process using a deblocking filter is applied to the edge of an input image that is not block noise, the image may become unnecessarily smooth or image distortion may occur. . Further, if the filtering process using the deblocking filter is not performed on the edge of the block boundary due to the block noise, the block noise may remain.
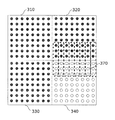
- FIG. 2A is a diagram illustrating pixels used in the determination process of whether or not the filtering process can be performed at the boundary between two coding block units CU adjacent in the horizontal direction.
- FIG. 2B is a diagram illustrating pixels used in the determination process for determining whether or not the filtering process can be performed at the boundary between two encoded block units CU adjacent in the vertical direction.
- block 340 is a processing target block, and adjacent blocks 310, 320, and 330 are processed (encoded or decoded) blocks.
- a pixel row 360 composed of pixels arranged in a line in the horizontal direction is set for each row.
- the pixel row 360 is composed of a total of 6 pixels, 3 pixels on both sides of the boundary.
- FIG. 2A is a diagram illustrating pixels used in the determination process of whether or not the filtering process can be performed at the boundary between two coding block units CU adjacent in the horizontal direction.
- block 340 is a processing target block
- adjacent blocks 310, 320, and 330 are processed
- a pixel column 370 composed of pixels arranged in a row in the vertical direction is set for each column.
- the pixel column 370 is composed of a total of 6 pixels, 3 pixels on both sides of the boundary. Executability determination processing is executed in units of pixel columns.
- FIG. 3A is a graph illustrating an example of the pixel value of each pixel included in the pixel row 360 illustrated in FIG. 2A.
- 3B is a diagram showing a more detailed example of the adjacent block 330 (block A in FIGS. 3A and 3B) and the processing target block 340 (block B in FIGS. 3A and 3B) shown in FIG. 2A.
- a line 410 (row 410) shown in FIG. 3A indicates a boundary between the block A and the block B.
- a pixel pr c is a pixel included in the block A.
- Pixel qr c is a pixel included in the block B. Note that r is an index for specifying a column, and is 0, 1,... In order from the line 410 side.
- C is an index for specifying a row, and is 0, 1,...
- H. In H.264 / MPEG-4AVC execution determination processing is performed by the following method.
- H. In H.264 / MPEG-4AVC the absolute value of the first derivative (first derivative) in the adjacent block A and the processing target block B is evaluated (for example, see Patent Document 1).
- the determination using the pixel row 360 illustrated in FIG. 2A will be described. The determination here is performed for all pixel rows in units of pixel rows.
- the pixels p0 and q0 are determined to execute the filtering process when the conditions expressed by the following Expressions 1 to 3 are satisfied.
- the pixel p1 is filtered when the condition expressed by the following Expression 4 is also satisfied.
- the pixel q1 is filtered when the condition shown in Expression 5 below is also satisfied.
- Equations 1 to 5 correspond to the evaluation of the primary differentiation in the first block and the primary differentiation in the second block.
- QP is a quantization parameter indicating the amount of quantization (quantization step size) applied in the quantization process
- ⁇ and ⁇ are scalar constants.
- QP New is a quantization parameter derived based on the quantization parameters QPA and QPB used for the first block A and the second block B, respectively, as shown in the following Expression 6.
- FIGS. 3A and 3B the process for determining whether or not to execute the filtering process in HEVC will be described with reference to FIGS. 3A and 3B.
- the absolute value of the second derivative (second derivative) in the adjacent block A and the processing target block B is evaluated.
- whether or not execution is possible is determined in units of blocks using the two pixel rows 430 of the third row and the sixth row from the top.
- an evaluation value d p and an evaluation value d q for determining whether or not execution is possible are calculated using the following Expression 7.
- the evaluation value d p and the evaluation value d q correspond to the evaluation results of the second derivative in the first block and the second derivative in the second block.
- FIG. 4A is a flowchart illustrating a processing procedure of filtering processing.
- FIG. 4B shows two blocks B P and B Q adjacent in the horizontal direction.
- FIG. 4C shows two blocks B P and B Q adjacent in the vertical direction.
- step S1000 the filter control unit of the deblocking filter processing unit 150 shown in FIG. 1 calculates the boundary strength BS as the first parameter.
- the value of the boundary strength BS is an integer of 0 or more. Details of the calculation procedure of the boundary strength BS will be described later.
- step S1010 when it is determined in step S1010 that the BS is an integer (Yes in S1010), in step S1020, the filter control unit sets a threshold value t c that defines the output range of the deblocking filter and the deblocking filter to be used. A threshold value ⁇ for selection is calculated. Details of the calculation method of the threshold value t c that defines the output range of the deblocking filter and the threshold value ⁇ for selecting the deblocking filter will be described later.
- step S1030 the filter control unit selects a deblocking filter based on the threshold value ⁇ . This selection includes not selecting a deblocking filter. Specifically, the filter control unit selects either a strong filter, a weak filter, or no filter based on the threshold value ⁇ .
- the filter control unit filters the block boundary to be processed using a narrowband deblocking filter (S1032).
- the filter control unit filters a block boundary to be processed using a wideband deblocking filter (S1034).
- the filter control unit does not perform filtering (S1036).
- the edge of the block boundary of the reconstructed image data can be smoothed, and the image quality of the reconstructed image can be improved.
- FIG. 5 is a flowchart showing the processing procedure of the boundary strength BS calculation processing in step S1000.
- the boundary strength BS there is a correlation between the value of the boundary strength BS and the magnitude of the block noise. Generally, the stronger the boundary strength BS, the larger the block noise.
- a determination condition of the boundary strength BS (i) whether a block is an intra-coded image, (ii) whether it is a CU edge, (iii) a cbf flag (having a coefficient) (Flag indicating whether or not) is 0, (iv) whether or not the reference pictures of the two blocks in contact with the boundary are the same, and (v) the absolute difference value of the pixel values is greater than a predetermined determination value Whether or not is set.
- the determination conditions in setting the boundary strength BS include other factors such as whether or not the motion vector used for motion compensation prediction of the encoding target block and the motion vector used for motion compensation prediction of the adjacent block are the same. Determination conditions may be used.
- step S210 the filter control unit 153 (FIG. 6) of the deblocking filter processing unit 150 (FIGS. 1 and 6) determines whether or not at least one of the blocks BP and BQ is an intra-coded image.
- an intra-encoded image I picture
- an inter-encoded image or the like For this reason, when at least one of the blocks BP and BQ is an intra-coded image, a relatively large value is set as the boundary strength.
- step S212 the filter control unit 153 determines that the block boundary currently being processed is the coding unit CU. It is determined whether it is a boundary (whether it is a CU edge).
- the value of the boundary strength BS is set to 4 (step S216).
- the value of the boundary strength BS is 3 (S214).
- step S210 If it is determined in step S210 that both the blocks BP and BQ are not intra-coded images (NO in S210), whether or not the value of either the flag cbf-P or the flag cbf-Q is not 0 Is determined (S220).
- the flag cbf-P is a flag indicating whether or not the block BP has a coefficient. When the value is not 0, it indicates that there is a coefficient. When the value is 0, it indicates that there is no coefficient. Show.
- the flag cbf-Q is a flag indicating whether or not the block BQ has a coefficient.
- the value of the boundary strength BS is set to 2 in step S222.
- the flag cbf-P or flag if one of cbf-Q is determined not to be 0 (NO in S220)
- the reference picture index RefIdx-P is an index indicating a picture to be referred to in the prediction process of the block BP .
- the reference picture index RefIdx-Q is an index indicating a picture to be referred to in the prediction process of the block BQ .
- the value of the boundary strength BS is set to 1.
- the parameter AbsHor is represented by the absolute value of the difference between the horizontal components of the motion vector used in the prediction process of the block BP and the motion vector used in the prediction process of the block BQ .
- the parameter AbsVer is represented by the absolute value of the difference between the vertical components of the motion vector used in the block B P prediction process and the motion vector used in the block B Q prediction process.
- 3 is used as the determination value of the parameters AbsHor and AbsVer.
- the present invention is not limited to this.
- the value of the boundary strength BS is set to 1 (S242).
- the boundary strength BS is set to 0 (S244).
- the deblocking filter processing unit 150 performs filtering using a stronger filter as the value of the boundary strength BS is larger. When the value of the boundary strength BS is 0, the deblocking filter processing unit 150 does not execute the filtering process.
- Equation 9 a two-dimensional encoding table using the quantization parameter QP and the boundary strength BS value as indices is used as shown in Equation 9 below. There is a method for deriving t c .
- the threshold t c is derived using a one-dimensional encoding table with variable t c _offset as an index. There is a way to do it.
- the parameter t c _offset is calculated based on the value of the boundary strength BS derived in step S1000 in FIG. 4A.
- the filter control unit sets 0 to t c _offset when the boundary strength BS is 2 or less, and sets 2 to t c _offset when the strengthening strength BS is greater than 2. Then, the parameter t c is determined by the following expression 10.
- a deblocking filtering method is an image processing method for performing filtering processing on an image block using a plurality of deblocking filters having different filter strengths, and is adjacent
- a first parameter calculating step for calculating a first parameter indicating a boundary strength between the two image blocks to be calculated, and a second parameter indicating a limit value of the deblocking filter based on the first parameter and the quantization parameter.
- the second parameter Tc is used for selecting the deblocking filter, it is possible to further increase the adaptability to block noise in the filtering process using the deblocking filter. Thereby, it is possible to further improve the image quality of the image after the filtering process.
- the second parameter may be calculated using a linear sum of the first parameter and the quantization parameter.
- the second parameter Tc is defined based on the linear sum of the first parameter (boundary strength BS) and the quantization parameter QP, the second parameter Tc is derived by a simple calculation. It becomes possible. This eliminates the need for a large memory space. Furthermore, according to the deblocking filtering method of the present configuration, the second parameter Tc is defined based on the linear sum of the first parameter (boundary strength BS) and the quantization parameter QP. Can be reduced.
- the deblocking filter is selected using the second parameter Tc derived by such a simple calculation, the processing amount of the processing related to the selection can be reduced, and the processing efficiency can be improved.
- the second parameter Tc is defined based on the linear sum of the first parameter (boundary strength BS) and the quantization parameter QP. It becomes possible to improve.
- the second parameter may be calculated such that the value increases as the value of the first parameter increases. Further, for example, in the second parameter calculation step, the second parameter may be calculated such that the value increases as the value of the quantization parameter increases.
- the image processing method having the above configuration since the second parameter Tc (for example, the threshold value of the loop filter) is changed according to the boundary strength BS, the image quality of the image after the filtering process can be improved.
- the second parameter Tc for example, the threshold value of the loop filter
- the second parameter is set according to the boundary strength BS.
- a filter adapted to the image can be set.
- the threshold value may be calculated such that the value increases as the value of the second parameter increases.
- the threshold value can be set appropriately.
- a first threshold value for selecting one deblocking filter from the plurality of deblocking filters and a second threshold value for determining whether to select a deblocking filter are: It may be determined that one blocking filter is selected from the plurality of deblocking filters, or that no deblocking filter is used.
- an execution feasibility determining step of determining whether to perform the filtering process using the first parameter before executing the selecting step may be included.
- a first determination step for determining whether at least one of the two adjacent image blocks is a block to be intra-encoded a first determination step for determining whether at least one of the two adjacent image blocks is a block to be intra-encoded
- the first determination step A step of setting a first fixed value as the first parameter when it is determined that at least one of the two adjacent image blocks is intra-encoded.
- the first parameter calculation step when it is determined in the first determination step that both of the two adjacent image blocks are blocks that are not intra-encoded, the first parameter is set to You may have the step which sets the 2nd fixed value different from said 1st fixed value.
- the two adjacent blocks are further included.
- a value of the first parameter is set using a second determination step for determining whether at least one of the two image blocks includes at least one non-zero transform coefficient, and a determination result of the second determination step. Steps may be included.
- the first parameter calculation step further includes the two adjacent images when the first determination step determines that both of the two adjacent image blocks are blocks that are not intra-encoded. Whether or not the second determination step for determining whether or not at least one of the blocks includes at least one non-zero transform coefficient and the two adjacent image blocks have different reference indexes indicating reference pictures in inter coding And a third determination step for determining whether or not at least one of the absolute difference value of the horizontal motion vector component and the absolute difference value of the vertical motion vector component between the two adjacent image blocks has a predetermined threshold value.
- a setting step of setting the first fixed value in the first parameter when set, and setting a second fixed value different from the first fixed value in the other case in the other cases. May be.
- the image processing method includes a compression step of compressing a prediction error block between an encoding target block composed of a plurality of pixels and a prediction block, and decoding the compressed prediction error block to convert the prediction block A reconstructing step for adding and generating a reconstructed block; a filtering step for performing the first parameter calculating step, the second parameter calculating step, and the selecting step for the reconstructed block; and a filtering step A prediction step for generating a prediction block by using the reconstructed block after execution of a coding step, and an encoding step for generating an encoded bitstream by encoding the compressed prediction error block Also good.
- the image processing method includes an acquisition step of acquiring an encoded bitstream including a decoding target block, a step of generating a reconstructed block by decoding the decoding target block and adding a prediction block, A filtering block that performs the first parameter calculation step, the second parameter calculation step, and the selection step with respect to the reconstructed block, and a prediction block that uses the reconstructed block after the filtering step is performed.
- a prediction step for generating is generating.
- an image processing apparatus is an image processing apparatus that performs filtering processing on an image block using a plurality of deblocking filters having different filter strengths, and is adjacent to the image processing apparatus.
- a first parameter calculating unit for calculating a first parameter indicating a boundary strength between two image blocks, and a second parameter for calculating a second parameter indicating a limit value of the deblocking filter based on the first parameter and the quantization parameter.
- a second parameter calculation unit, and a second parameter calculation unit comprising: a two-parameter calculation unit; and a selection unit that selects a deblocking filter used in the filtering process from the plurality of deblocking filters using a threshold value determined based on the second parameter. Is the sum of the first parameter and the quantization parameter It is calculated as the value of the second parameter.
- Embodiment 1 The image processing method and image processing apparatus according to Embodiment 1 will be described with reference to FIGS. 1 to 3B and FIGS. 7A to 9.
- an example in which the image processing method and the image processing device are applied to a moving image encoding method and a moving image encoding device will be described.
- the configuration of the moving picture encoding apparatus according to the present embodiment is the same as that of the moving picture encoding apparatus of the comparative example shown in FIG.
- the moving picture coding apparatus according to the present embodiment is different from the moving picture coding apparatus 100 of the comparative example in the configuration of the deblocking filter processing unit 150.
- the deblocking filter processing unit 150 includes a plurality of deblocking filters having different strengths and a filter control unit that controls the plurality of deblocking filters.
- FIG. 6 is a block diagram illustrating a configuration example of the deblocking filter processing unit 150.
- the deblocking filter processing unit 150 includes a first deblocking filter 151, a second deblocking filter 152, and a filter control unit 153.
- the first deblocking filter is a strong deblocking filter with a narrow band.
- the second deblocking filter is a wide band weak deblocking filter.
- the number and structure of a deblocking filter are not restricted to this.
- the filter control unit 153 includes a boundary strength calculation unit 154, a Tc calculation unit 155, and a filter selection unit 156.
- a process for determining whether or not to execute the filtering process (corresponding to an execution determination process) and (2) a process for selecting a deblocking filter to be used are executed.
- the (1) The process for determining whether or not to execute the filtering process is the same as that in the comparative example.
- FIG. 7A is a flowchart illustrating a processing procedure of the filtering processing according to the present embodiment.
- FIG. 7B shows two blocks B P and B Q adjacent in the horizontal direction.
- FIG. 7C shows two blocks B P and B Q adjacent in the vertical direction.
- step S100 the boundary strength calculation unit 154 of the filter control unit 153 calculates the boundary strength BS as the first parameter (first parameter calculation step).
- Figure 8 is a flowchart showing the procedure of setting the offset value t c _offset calculation process and the threshold t c of boundary strength BS in the present embodiment.
- the value of the boundary strength BS is an integer of 0 or more.
- the boundary strength BS calculation procedure (S210 to S244) is the same as that in the comparative example.
- the boundary strength calculation unit 154 sets the offset value t c _offset of the threshold value t c according to the value of the boundary strength BS as shown in FIG.
- the value of the BS is different, also different values of t c _offset.
- t c _offset 3
- t c _offset 2
- BS 2
- T c _offset 0.
- the value of t c _offset is constant regardless of the boundary strength BS (AVC), or the same t c _offset is assigned to a plurality of boundary strength BSs (HEVC).
- step S110 when it is determined in step S110 that the BS is an integer (Yes in S110), in step S120, the Tc calculation unit of the filter control unit 153 calculates a threshold t c that defines the output range of the deblocking filter. (Second parameter calculation step).
- the threshold value t c is set using a tabular function with a value obtained by combining the boundary strength BS and the quantization parameter QP, for example, a value considering t c _offset as a total value. Is done.
- the value of t c _offset is also different, so the number of values taken by the threshold value t c tends to be larger than that in the comparative example. Thereby, the adaptability of a deblocking filter can be improved.
- the filter control unit 153 calculates a threshold value ⁇ for selecting a deblocking filter to be used.
- the threshold value ⁇ can be expressed as a function ( ⁇ (QP)) of the quantization parameter QP.
- step S130 the filter selection unit 156 of the filter control unit 153 selects a deblocking filter based on the threshold value t c and the threshold value ⁇ (selection step). This selection includes not selecting a deblocking filter. Specifically, the filter selection unit 156 first determines whether or not to select a strong filter based on the threshold value ⁇ .
- the threshold values ⁇ and t c are both expressed as a function of the quantization parameter QP.
- the quantization parameter QP may be set for a part of an image or the like.
- the value of the threshold ⁇ is derived based on QP using a lookup table.
- strong filtering is performed by the first deblocking filter 151 (S132). Details of the strong filtering will be described later.
- the filter selection unit 156 further determines whether to select a weak filter or no filter.
- the filter selection unit 156 calculates the discriminant value ⁇ (absolute value) using the following expression 12.
- a weak filter is selected when the following expression 13 is satisfied.
- weak filtering is performed by the second deblocking filter 152 (S134). Details of the weak filtering will be described later.
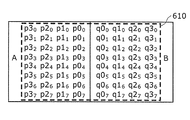
- the first deblocking filter 151 uses the pixels p3 i , p2 i , p1 i , p0 i , q0 i , q1 i , q2 i , q3 i according to the HEVC model and uses the pixels p2 i , p1 i. , P0 i , q0 i , q1 i , q2 i are filtered.
- FIG. 9A is a diagram illustrating an example of pixels used in strong filtering.
- FIG. 9A shows pixels (samples) used to horizontally filter a vertical edge between two horizontally adjacent blocks. Pixels in a region 610 surrounded by a broken line are pixels used for strong filtering.
- FIG. 9B is a diagram illustrating pixels to be filtered. Pixels in a region 620 surrounded by a broken line are pixels that are strongly filtered.
- the first deblocking filter 151 uses the four pixels adjacent to the left side of the boundary and filters the three pixels adjacent to the left side of the boundary according to the following Expression 14.
- the first deblocking filter 151 uses the four pixels adjacent to the right side of the boundary and filters the three pixels adjacent to the right side of the boundary according to the following Expression 15.
- the function Clip (x) is defined by the following expression 16.
- max_allowed_value is the maximum value that x of Clip (x) can have.
- max_allowed_value 255.
- max_allowed_value 1023.
- filtering is performed on a line-by-line basis.
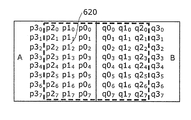
- the second deblocking filter 152 When “weak filter” is selected, the second deblocking filter 152 performs weak filtering (S134). Specifically, the second deblocking filter 152 uses the pixels p2 i , p1 i , p0 i , q0 i , q1 i , q2 i according to the HEVC model, and the pixels p1 i , p0 i , q0 i , q1 i Filter.
- FIG. 10A is a diagram illustrating an example of pixels used in weak filtering.
- FIG. 10A shows pixels (samples) used to horizontally filter a vertical edge between two horizontally adjacent blocks. Pixels in a region 630 surrounded by a broken line are pixels used for weak filtering.
- FIG. 10B is a diagram illustrating pixels to be filtered. Pixels in the region 640 surrounded by a broken line are weakly filtered pixels.
- the second deblocking filter 152 filters the pixel p0 i that is closest to the left side of the boundary and the pixel q0 i that is closest to the right side of the boundary according to the following Expression 17.
- q0 i ′ is a pixel value after filtering the pixel q0 i
- q0 i ′ is a pixel value after filtering the pixel q0 i .
- ⁇ 1 is obtained by the following equation (18).
- the function Clip3 (x) is defined by the following Expression 19.
- the second deblocking filter 152 determines whether or not to filter each of the pixel p1i and the pixel q1i next closest to the boundary. Note that the determination for the pixel p1i and the determination for the pixel q1i are performed separately.
- the determination for the pixel p1i is performed using the evaluation value d p shown in Expression 7 described in the comparative example (1) determination process for determining whether or not to execute the filtering process. Specifically, when d p ⁇ ( ⁇ / 6) is satisfied, the second deblocking filter 152 filters the pixel p1 i according to Expression 20 below.
- p1 i ′ is a pixel value after filtering the pixel p1 i .
- ⁇ 2p is obtained by the following equation (21).
- the determination with respect to the pixel q1i is performed using the evaluation value d q shown in Expression 7 described in (1) the determination process on whether to execute the filtering process in the comparative example. Specifically, when d q ⁇ ( ⁇ / 6) is satisfied, the second deblocking filter 152 filters the pixel q1 i according to the following Expression 22.
- q1 i ′ is a pixel value after filtering the pixel q1 i .
- ⁇ 2q is obtained by the following equation (23).
- the present invention can also be applied to the case of performing vertical filtering on a horizontal edge by switching the horizontal direction and the vertical direction, and the row and the column, respectively. .
- the threshold t c of the loop filter is obtained by a function using a linear sum of the quantization parameter QP and the boundary strength BS.
- t c _offset is because it is determined based on the BS, it can be said that does not require the labor of calculation. For this reason, it is possible to reduce the use area of the memory and reduce the processing amount.
- t c _offset in the comparative example the common value for all the boundary strength BS or, but only take two values, t c _offset of the present embodiment, apart from different t c _offset setting boundary strength BS Is done. This makes it possible to deal with block noise more precisely.
- FIG. 11 is a diagram illustrating a processing procedure for setting the offset value t c _offset of the threshold value t c in the comparative example.
- the same processes as those in FIG. 8 are denoted by the same reference numerals.
- FIG. 12A is a diagram showing the coding efficiency of the comparative example and the present embodiment when the common test condition is used.
- the coding efficiency is indicated by a BD rate calculated using piecewise cubic interpolation.
- Modification 1 describes a case where the calculation procedure of the boundary strength BS (step S100 in FIG. 7A) is different from the above embodiment.
- FIG. 13 is a flowchart showing a processing procedure for calculating the boundary strength BS in the present modification.
- step S210 the filter control unit 153 (FIG. 6) determines whether at least one of the blocks BP and BQ is an intra-coded image, as in the first embodiment.
- the filter control unit 153 sets the value of the boundary strength BS to 3 (S218). Note that the value of the boundary strength BS in step S218 is not limited to 3, but may be a value larger than the value of the boundary strength BS set in another step.
- step S210 If it is determined in step S210 that both blocks BP and BQ are not intra-coded images (NO in S210), the processing is the same as in the first embodiment.
- FIG. 14 shows the coding efficiency of the first modification shown in FIG. 13 (right side of the figure) and the coding efficiency of the comparative example shown in FIG. 5 (left side of the figure) as shown in Non-Patent Document 2.
- FIG. 14 shows the coding efficiency of the first modification shown in FIG. 13 (right side of the figure) and the coding efficiency of the comparative example shown in FIG. 5 (left side of the figure) as shown in Non-Patent Document 2.
- the encoding efficiency is substantially the same as in the comparative example. However, as described above, it is possible to reduce the processing load and improve the processing efficiency.
- the threshold value t c is obtained using the following Expression 24 using the lookup table function Tctable.
- FIG. 15 is a diagram illustrating the value of the threshold value t c set in the present modification. As shown in FIG. 15, also in the first modification, different threshold values t c are assigned to different boundary strengths BS.
- the value of the boundary strength BS set in Modification 2 will be described with reference to FIG. In FIG. 16, the value of the boundary strength BS that is set is 1 smaller than the value of the boundary strength BS of the first modification.
- step S210 when it is determined in step S210 that at least one of the blocks BP and BQ is an intra-coded image (YES in step S210), the value of the boundary strength BS is set to 2 (S211). ).
- step S220 when it is determined that one of the flags cbf-P and cbf-Q is not 0 (YES in step S220), the value of the boundary strength BS is set to 1 (S224).
- step S230 If it is determined in step S230 that the reference picture index RefIdx-P and the reference picture index RefIdx-Q are different (YES in S230), the value of the boundary strength BS is set to 1 (S234).
- step S240 when one of the parameters AbsHor and AbsVer is larger than 3 (YES in S240), the value of the boundary strength BS is set to 0 (S246). On the other hand, when both the parameters AbsHor and AbsVer are 3 or less (NO in S240), the boundary strength BS is set to 0 (S248).
- a method for setting the value of the threshold value t c in Modification 2 will be described. Similar to the first modification, the second modification uses the lookup table function Ttable, but the index calculation method is different. In the second modification, the threshold value t c is obtained using the following Expression 25.
- Modification 2 like the modified example 1, a) CU edge whether no processing for confirmation of, b) for the calculation of the threshold t c without using the offset value t c _offset, the moving picture coding apparatus 100
- the processing load can be reduced.
- Modification 3 a case where the calculation procedure of the boundary strength BS (step S100 in FIG. 7A) is different from the above-described embodiment, Modification 1 and Modification 2 will be described.
- FIG. 17 is a flowchart showing a processing procedure for calculating the boundary strength BS in the present modification.
- step S210 the filter control unit 153 (FIG. 6) of the deblocking filter processing unit 150 (FIGS. 1 and 6) converts at least one of the blocks BP and BQ into an intra-coded image, as in the above embodiment. It is determined whether or not.
- the value of the boundary strength BS is set to 2 (step S211).
- step S210 If it is determined in step S210 that both the blocks BP and BQ are not intra-coded images (NO in S210), whether or not the value of either the flag cbf-P or the flag cbf-Q is not 0 Is determined (S220).
- step S220 (NO in S220) if one of the flag cbf-P or flag cbf-Q is determined not to be 0, the reference picture index RefIdx-P block B P, block B Q of the reference picture It is determined whether or not the indices RefIdx-Q are different from each other (S230).
- step S230 If it is determined in step S230 that the reference picture index RefIdx-P and the reference picture index RefIdx-Q are different (YES in S230), the value of the boundary strength BS is set to 0 (S236).
- step S230 if it is determined in step S230 that the reference picture index RefIdx-P and the reference picture index RefIdx-Q are the same (NO in S230), whether one of the parameters AbsHor and AbsVer is greater than 3 or not. Is determined (S240).
- step S240 when it is determined that one of the parameters AbsHor and AbsVer is larger than 3 (YES in S240), the value of the boundary strength BS is set to 0 (S246). On the other hand, if it is determined in step S240 that both parameters AbsHor and AbsVer are 3 or less (NO in S240), no deblocking is set (S248).
- step S220 (YES in S220) If both flags cbf-P and flag cbf-Q is determined to be 0, and the reference picture index RefIdx-P block B P, block B Q a reference picture index RefIdx It is determined whether or not ⁇ Q is different from each other (S250).
- step S250 If it is determined in step S250 that the reference picture index RefIdx-P and the reference picture index RefIdx-Q are the same (NO in S250), the value of the boundary strength BS is set to 1 (S252).
- step S250 If it is determined in step S250 that the reference picture index RefIdx-P and the reference picture index RefIdx-Q are different (YES in S250), it is determined whether one of the parameters AbsHor and AbsVer is greater than 3. (S260).
- step S260 when it is determined that one of the parameters AbsHor and AbsVer is larger than 3 (YES in S260), the value of the boundary strength BS is set to 2 (S264). On the other hand, when it is determined in step S260 that both parameters AbsHor and AbsVer are 3 or less (NO in S240), the value of the boundary strength BS is set to 1 (S262).
- Modification 4 describes a case where the processing procedure of the filtering process and the calculation procedure of the boundary strength BS are different from the above embodiment and Modifications 1 to 3.
- FIG. 18A is a flowchart showing the processing procedure of the filtering process of the fourth modification.
- step S300 the filter control unit 153 calculates the boundary strength BS as the first parameter (first parameter calculation step).
- FIG. 18B is a flowchart showing a procedure for setting the boundary strength BS.
- it is determined whether or not at least one of the blocks BP and BQ is an intra-coded image (S210).
- the value of the boundary strength BS is set to 2 (S211).
- the value of the boundary strength BS is set to 0 (S213). Note that the set value of the boundary strength BS may be another value.
- step S120 the filter control unit 153 calculates a threshold value t c that defines the output range of the deblocking filter (second parameter calculation step). Furthermore, in step S120, the filter control unit 153 calculates a threshold value ⁇ for selecting a deblocking filter to be used.
- step S330 the filter control unit 153 selects a deblocking filter based on the threshold value t c and the threshold value ⁇ (selection step).
- step S330 When a strong filter is selected in step S330, strong filtering is performed by the first deblocking filter 151 (S132). When a weak filter is selected in step S330, weak filtering is performed by the second deblocking filter 152 (S134).
- step S330 If no filtering process is selected in step S330, filtering using the deblocking filter is not performed (S136).
- the processing procedure of the filtering process and the calculation procedure of the boundary strength BS are simplified, so that it is possible to reduce the processing load of the moving picture encoding apparatus 100. Furthermore, it is possible to reduce the memory capacity used in the calculation procedure of the boundary strength BS. That is, since the values that the boundary strength BS can take are 0 to 3, the boundary strength BS can be represented by a 2-bit information amount. Thus, the advantage of this modification is that the same deblocking result as the current HM-4.0 can be obtained while processing with a smaller memory capacity.
- Embodiment 2 A moving picture decoding method and a moving picture decoding apparatus according to Embodiment 2 will be described with reference to FIG.
- FIG. 1 is a block diagram illustrating a configuration example of a moving picture decoding device based on H.264 / MPEG-4AVC or HEVC moving picture coding standard.
- the video decoding device 200 includes an entropy decoding unit 290, an inverse quantization / inverse conversion unit 230, an addition unit 240, a deblocking filter processing unit 250, a sample adaptive offset processing unit 260, and an adaptive loop filter process.
- the entropy decoding unit 290 decodes information necessary for decoding such as a prediction mode and a quantization coefficient by performing variable length decoding processing on the input encoded bitstream.
- the inverse quantization / inverse transform unit 230 performs an inverse quantization process on the quantization coefficient obtained by the variable length decoding process, and converts the quantized coefficient obtained by the inverse quantization process from the frequency domain to the image domain. To generate prediction error data e3.
- the addition unit 240 predicts prediction image data (prediction image signal s5) and prediction error data (prediction error signal) subjected to inverse quantization processing and inverse transformation processing by the inverse quantization / inverse transformation unit 230. By adding e3), reconstructed image data (reconstructed image signal s1) is generated.
- the deblocking filter processing unit 250 includes a plurality of deblocking filters having different strengths and a filter control unit that controls the plurality of deblocking filters.
- the deblocking filter processing unit 250 includes a plurality of deblocking filters corresponding to the types of deblocking filters included in the video encoding device 100.
- the deblocking filter processing unit 250 may include two types of deblocking filters, a narrow band and a wide band, as in the first embodiment. Note that the configuration of the deblocking filter processing unit 250 corresponds to the configuration of the deblocking filter processing unit 150 of the first embodiment.
- the sample adaptive offset processing unit 260 gives an offset value for approximating the original pixel value in units of pixels to the reconstructed image data (reconstructed image signal s2) filtered by the deblocking filter processing unit 250. I do.
- the adaptive loop filter processing unit 255 includes an adaptive loop filter such as a Wiener filter, and applies image distortion caused by compression to the reconstructed image data (reconstructed image signal s3) output from the sample adaptive offset processing unit 260. Perform compensation process.
- the output image signal s4 of the adaptive loop filter processing unit 255 is output as a decoded signal indicating a decoded image.
- reconstructed image data (reconstructed image signal s4) to which the adaptive loop filter is applied is stored in units of frames.
- the prediction unit 280 includes an intra prediction unit that generates a predicted image using spatial prediction (intra prediction) and an inter prediction unit that generates a predicted image using temporal prediction (inter prediction). ing.
- the prediction unit 280 can change the prediction type for each frame or block.
- Embodiment 3 A moving picture coding method and a moving picture coding apparatus according to Embodiment 3 will be described with reference to FIG.
- FIG. 20 is a block diagram illustrating a configuration example of a moving image encoding apparatus (hybrid video encoder) according to the present embodiment.
- the moving image encoding apparatus 300 includes a subtraction unit 105, a conversion unit 110, a quantization unit 120, an inverse quantization / inverse conversion unit 130, an addition unit 140, a horizontal deblocking filter processing unit 310, a vertical A deblocking filter processing unit 320, an adaptive loop filter processing unit 165, a sample adaptive offset processing unit 160, a prediction unit 180, and an entropy coding unit 190 are provided.
- the configuration of the encoding unit 190 includes the subtraction unit 105, the conversion unit 110, the quantization unit 120, the inverse quantization / inverse conversion unit 130, the addition unit 140, and the adaptive loop filter processing unit of the first embodiment (comparative example), respectively.
- 165, the configuration of the sample adaptive offset processing unit 155, the prediction unit 180, and the entropy encoding unit 190 is the same.
- the moving picture coding apparatus 300 according to the present embodiment is different from the moving picture coding apparatus 100 according to the first embodiment in that the deblocking filter processing unit 150 shown in FIG. 1 performs a horizontal filtering process on vertical edges.
- a deblocking filter processing unit 310 and a vertical deblocking filter processing unit 320 that performs filtering processing on horizontal edges are subdivided.
- the horizontal deblocking filter processing unit 310 performs a filtering process on the vertical edge on the reconstructed signal s1 output from the adder 140 to generate a reconstructed signal s6.
- the vertical deblocking filter processing unit 320 performs a filtering process on the horizontal edge on the reconstructed signal s6.
- FIG. 20 further shows that the quantization parameter QP is input to the entropy encoding unit 190, the horizontal deblocking filter processing unit 310, and the vertical deblocking filter processing unit 320.
- the storage medium may be any medium that can record a program, such as a magnetic disk, an optical disk, a magneto-optical disk, an IC card, and a semiconductor memory.
- the system has an image encoding / decoding device including an image encoding device using an image encoding method and an image decoding device using an image decoding method.
- image encoding / decoding device including an image encoding device using an image encoding method and an image decoding device using an image decoding method.
- Other configurations in the system can be appropriately changed according to circumstances.
- FIG. 21 is a diagram showing an overall configuration of a content supply system ex100 that realizes a content distribution service.
- a communication service providing area is divided into desired sizes, and base stations ex106, ex107, ex108, ex109, and ex110, which are fixed wireless stations, are installed in each cell.
- This content supply system ex100 includes a computer ex111, a PDA (Personal Digital Assistant) ex112, a camera ex113, a mobile phone ex114, a game machine ex115 via the Internet ex101, the Internet service provider ex102, the telephone network ex104, and the base stations ex106 to ex110. Etc. are connected.
- PDA Personal Digital Assistant
- each device may be directly connected to the telephone network ex104 without going from the base station ex106, which is a fixed wireless station, to ex110.
- the devices may be directly connected to each other via short-range wireless or the like.
- the camera ex113 is a device that can shoot moving images such as a digital video camera
- the camera ex116 is a device that can shoot still images and movies such as a digital camera.
- the mobile phone ex114 is a GSM (registered trademark) (Global System for Mobile Communications) system, a CDMA (Code Division Multiple Access) system, a W-CDMA (Wideband-Code Division Multiple Access) system, or an LTE (Long Terminal Term Evolution). It is possible to use any of the above-mentioned systems, HSPA (High Speed Packet Access) mobile phone, PHS (Personal Handyphone System), or the like.
- the camera ex113 and the like are connected to the streaming server ex103 through the base station ex109 and the telephone network ex104, thereby enabling live distribution and the like.
- live distribution content that is shot by a user using the camera ex113 (for example, music live video) is encoded as described in each of the above embodiments (that is, in one aspect of the present invention).
- the streaming server ex103 stream-distributes the content data transmitted to the requested client. Examples of the client include a computer ex111, a PDA ex112, a camera ex113, a mobile phone ex114, and a game machine ex115 that can decode the encoded data.
- Each device that receives the distributed data decodes the received data and reproduces it (that is, functions as an image decoding device according to one embodiment of the present invention).
- the captured data may be encoded by the camera ex113, the streaming server ex103 that performs data transmission processing, or may be shared with each other.
- the decryption processing of the distributed data may be performed by the client, the streaming server ex103, or may be performed in common with each other.
- still images and / or moving image data captured by the camera ex116 may be transmitted to the streaming server ex103 via the computer ex111.
- the encoding process in this case may be performed by any of the camera ex116, the computer ex111, and the streaming server ex103, or may be performed in a shared manner.
- these encoding / decoding processes are generally performed in the computer ex111 and the LSI ex500 included in each device.
- the LSI ex500 may be configured as a single chip or a plurality of chips.
- moving image encoding / decoding software is incorporated into some recording medium (CD-ROM, flexible disk, hard disk, etc.) that can be read by the computer ex111, etc., and encoding / decoding processing is performed using the software. May be.
- moving image data acquired by the camera may be transmitted.
- the moving image data at this time is data encoded by the LSI ex500 included in the mobile phone ex114.
- the streaming server ex103 may be a plurality of servers or a plurality of computers, and may process, record, and distribute data in a distributed manner.
- the encoded data can be received and reproduced by the client.
- the information transmitted by the user can be received, decrypted and reproduced by the client in real time, and personal broadcasting can be realized even for a user who does not have special rights or facilities.
- the digital broadcast system ex200 also includes at least the moving image encoding device (image encoding device) or the moving image decoding according to each of the above embodiments. Any of the devices (image decoding devices) can be incorporated.
- the broadcast station ex201 multiplexed data obtained by multiplexing music data and the like on video data is transmitted to a communication or satellite ex202 via radio waves.
- This video data is data encoded by the moving image encoding method described in each of the above embodiments (that is, data encoded by the image encoding apparatus according to one aspect of the present invention).
- the broadcasting satellite ex202 transmits a radio wave for broadcasting, and this radio wave is received by a home antenna ex204 capable of receiving satellite broadcasting.
- the received multiplexed data is decoded and reproduced by an apparatus such as the television (receiver) ex300 or the set top box (STB) ex217 (that is, functions as an image decoding apparatus according to one embodiment of the present invention).
- a reader / recorder ex218 that reads and decodes multiplexed data recorded on a recording medium ex215 such as a DVD or a BD, or encodes a video signal on the recording medium ex215 and, in some cases, multiplexes and writes it with a music signal. It is possible to mount the moving picture decoding apparatus or moving picture encoding apparatus described in the above embodiments. In this case, the reproduced video signal is displayed on the monitor ex219, and the video signal can be reproduced in another device or system using the recording medium ex215 on which the multiplexed data is recorded.
- a moving picture decoding apparatus may be mounted in a set-top box ex217 connected to a cable ex203 for cable television or an antenna ex204 for satellite / terrestrial broadcasting and displayed on the monitor ex219 of the television.
- the moving picture decoding apparatus may be incorporated in the television instead of the set top box.
- FIG. 23 is a diagram illustrating a television (receiver) ex300 that uses the video decoding method and the video encoding method described in each of the above embodiments.
- the television ex300 obtains or outputs multiplexed data in which audio data is multiplexed with video data via the antenna ex204 or the cable ex203 that receives the broadcast, and demodulates the received multiplexed data.
- the modulation / demodulation unit ex302 that modulates multiplexed data to be transmitted to the outside, and the demodulated multiplexed data is separated into video data and audio data, or the video data and audio data encoded by the signal processing unit ex306 Is provided with a multiplexing / demultiplexing unit ex303.
- the television ex300 also decodes the audio data and the video data, or encodes the information, the audio signal processing unit ex304, the video signal processing unit ex305 (the image encoding device or the image according to one embodiment of the present invention) A signal processing unit ex306 that functions as a decoding device), a speaker ex307 that outputs the decoded audio signal, and an output unit ex309 that includes a display unit ex308 such as a display that displays the decoded video signal. Furthermore, the television ex300 includes an interface unit ex317 including an operation input unit ex312 that receives an input of a user operation. Furthermore, the television ex300 includes a control unit ex310 that performs overall control of each unit, and a power supply circuit unit ex311 that supplies power to each unit.
- the interface unit ex317 includes a bridge unit ex313 connected to an external device such as a reader / recorder ex218, a recording unit ex216 such as an SD card, and an external recording unit such as a hard disk.
- a driver ex315 for connecting to a medium, a modem ex316 for connecting to a telephone network, and the like may be included.
- the recording medium ex216 is capable of electrically recording information by using a nonvolatile / volatile semiconductor memory element to be stored.
- Each part of the television ex300 is connected to each other via a synchronous bus.
- the television ex300 receives a user operation from the remote controller ex220 or the like, and demultiplexes the multiplexed data demodulated by the modulation / demodulation unit ex302 by the multiplexing / demultiplexing unit ex303 based on the control of the control unit ex310 having a CPU or the like. Furthermore, in the television ex300, the separated audio data is decoded by the audio signal processing unit ex304, and the separated video data is decoded by the video signal processing unit ex305 using the decoding method described in each of the above embodiments.
- the decoded audio signal and video signal are output from the output unit ex309 to the outside. At the time of output, these signals may be temporarily stored in the buffers ex318, ex319, etc. so that the audio signal and the video signal are reproduced in synchronization. Also, the television ex300 may read multiplexed data from recording media ex215 and ex216 such as a magnetic / optical disk and an SD card, not from broadcasting. Next, a configuration in which the television ex300 encodes an audio signal or a video signal and transmits the signal to the outside or to a recording medium will be described.
- the television ex300 receives a user operation from the remote controller ex220 and the like, encodes an audio signal with the audio signal processing unit ex304, and converts the video signal with the video signal processing unit ex305 based on the control of the control unit ex310. Encoding is performed using the encoding method described in (1).
- the encoded audio signal and video signal are multiplexed by the multiplexing / demultiplexing unit ex303 and output to the outside. When multiplexing, these signals may be temporarily stored in the buffers ex320, ex321, etc. so that the audio signal and the video signal are synchronized.
- a plurality of buffers ex318, ex319, ex320, and ex321 may be provided as illustrated, or one or more buffers may be shared. Further, in addition to the illustrated example, data may be stored in the buffer as a buffer material that prevents system overflow and underflow, for example, between the modulation / demodulation unit ex302 and the multiplexing / demultiplexing unit ex303.
- the television ex300 has a configuration for receiving AV input of a microphone and a camera, and performs encoding processing on the data acquired from them. Also good.
- the television ex300 has been described as a configuration capable of the above-described encoding processing, multiplexing, and external output, but these processing cannot be performed, and only the above-described reception, decoding processing, and external output are possible. It may be a configuration.
- the decoding process or the encoding process may be performed by either the television ex300 or the reader / recorder ex218,
- the reader / recorder ex218 may share with each other.
- FIG. 24 shows the configuration of the information reproducing / recording unit ex400 when data is read from or written to the optical disk.
- the information reproducing / recording unit ex400 includes elements ex401, ex402, ex403, ex404, ex405, ex406, and ex407 described below.
- the optical head ex401 irradiates a laser spot on the recording surface of the recording medium ex215 that is an optical disk to write information, and detects information reflected from the recording surface of the recording medium ex215 to read the information.
- the modulation recording unit ex402 electrically drives a semiconductor laser built in the optical head ex401 and modulates the laser beam according to the recording data.
- the reproduction demodulator ex403 amplifies the reproduction signal obtained by electrically detecting the reflected light from the recording surface by the photodetector built in the optical head ex401, separates and demodulates the signal component recorded on the recording medium ex215, and is necessary To play back information.
- the buffer ex404 temporarily holds information to be recorded on the recording medium ex215 and information reproduced from the recording medium ex215.
- the disk motor ex405 rotates the recording medium ex215.
- the servo control unit ex406 moves the optical head ex401 to a predetermined information track while controlling the rotational drive of the disk motor ex405, and performs a laser spot tracking process.
- the system control unit ex407 controls the entire information reproduction / recording unit ex400.
- the system control unit ex407 uses various types of information held in the buffer ex404, and generates and adds new information as necessary.
- the modulation recording unit ex402, the reproduction demodulation unit This is realized by recording / reproducing information through the optical head ex401 while operating the ex403 and the servo control unit ex406 in a coordinated manner.
- the system control unit ex407 includes, for example, a microprocessor, and executes these processes by executing a read / write program.
- the optical head ex401 has been described as irradiating a laser spot.
- a configuration in which higher-density recording is performed using near-field light may be used.
- FIG. 25 shows a schematic diagram of a recording medium ex215 that is an optical disk.
- Guide grooves grooves
- address information indicating the absolute position on the disc is recorded in advance on the information track ex230 by changing the shape of the groove.
- This address information includes information for specifying the position of the recording block ex231 that is a unit for recording data, and the recording block is specified by reproducing the information track ex230 and reading the address information in a recording or reproducing apparatus.
- the recording medium ex215 includes a data recording area ex233, an inner peripheral area ex232, and an outer peripheral area ex234.
- the area used for recording user data is the data recording area ex233, and the inner circumference area ex232 and the outer circumference area ex234 arranged on the inner or outer circumference of the data recording area ex233 are used for specific purposes other than user data recording. Used.
- the information reproducing / recording unit ex400 reads / writes encoded audio data, video data, or multiplexed data obtained by multiplexing these data with respect to the data recording area ex233 of the recording medium ex215.
- an optical disk such as a single-layer DVD or BD has been described as an example.
- the present invention is not limited to these, and an optical disk having a multilayer structure and capable of recording other than the surface may be used.
- an optical disc with a multi-dimensional recording / reproducing structure such as recording information using light of different wavelengths in the same place on the disc, or recording different layers of information from various angles. It may be.
- the car ex210 having the antenna ex205 can receive data from the satellite ex202 and the like, and the moving image can be reproduced on a display device such as the car navigation ex211 that the car ex210 has.
- the configuration of the car navigation ex211 may be, for example, a configuration in which a GPS receiving unit is added in the configuration illustrated in FIG. 23, and the same may be considered for the computer ex111, the mobile phone ex114, and the like.
- FIG. 26A is a diagram showing the mobile phone ex114 using the moving picture decoding method and the moving picture encoding method described in the above embodiment.
- the mobile phone ex114 includes an antenna ex350 for transmitting and receiving radio waves to and from the base station ex110, a camera unit ex365 capable of capturing video and still images, a video captured by the camera unit ex365, a video received by the antenna ex350, and the like Is provided with a display unit ex358 such as a liquid crystal display for displaying the decrypted data.
- the mobile phone ex114 further includes a main body unit having an operation key unit ex366, an audio output unit ex357 such as a speaker for outputting audio, an audio input unit ex356 such as a microphone for inputting audio, a captured video,
- an audio input unit ex356 such as a microphone for inputting audio
- a captured video In the memory unit ex367 for storing encoded data or decoded data such as still images, recorded audio, received video, still images, mails, or the like, or an interface unit with a recording medium for storing data
- a slot ex364 is provided.
- the mobile phone ex114 has a power supply circuit part ex361, an operation input control part ex362, and a video signal processing part ex355 with respect to a main control part ex360 that comprehensively controls each part of the main body including the display part ex358 and the operation key part ex366.
- a camera interface unit ex363, an LCD (Liquid Crystal Display) control unit ex359, a modulation / demodulation unit ex352, a multiplexing / demultiplexing unit ex353, an audio signal processing unit ex354, a slot unit ex364, and a memory unit ex367 are connected to each other via a bus ex370. ing.
- the power supply circuit unit ex361 starts up the mobile phone ex114 in an operable state by supplying power from the battery pack to each unit.
- the cellular phone ex114 converts the audio signal collected by the audio input unit ex356 in the voice call mode into a digital audio signal by the audio signal processing unit ex354 based on the control of the main control unit ex360 having a CPU, a ROM, a RAM, and the like. Then, this is subjected to spectrum spread processing by the modulation / demodulation unit ex352, digital-analog conversion processing and frequency conversion processing are performed by the transmission / reception unit ex351, and then transmitted via the antenna ex350.
- the mobile phone ex114 also amplifies the received data received via the antenna ex350 in the voice call mode, performs frequency conversion processing and analog-digital conversion processing, performs spectrum despreading processing by the modulation / demodulation unit ex352, and performs voice signal processing unit After being converted into an analog audio signal by ex354, this is output from the audio output unit ex357.
- the text data of the e-mail input by operating the operation key unit ex366 of the main unit is sent to the main control unit ex360 via the operation input control unit ex362.
- the main control unit ex360 performs spread spectrum processing on the text data in the modulation / demodulation unit ex352, performs digital analog conversion processing and frequency conversion processing in the transmission / reception unit ex351, and then transmits the text data to the base station ex110 via the antenna ex350.
- almost the reverse process is performed on the received data and output to the display unit ex358.
- the video signal processing unit ex355 compresses the video signal supplied from the camera unit ex365 by the moving image encoding method described in the above embodiments. Encode (that is, function as an image encoding device according to an aspect of the present invention), and send the encoded video data to the multiplexing / demultiplexing unit ex353.
- the audio signal processing unit ex354 encodes the audio signal picked up by the audio input unit ex356 while the camera unit ex365 images a video, a still image, etc., and sends the encoded audio data to the multiplexing / separating unit ex353. To do.
- the multiplexing / demultiplexing unit ex353 multiplexes the encoded video data supplied from the video signal processing unit ex355 and the encoded audio data supplied from the audio signal processing unit ex354 by a predetermined method, and is obtained as a result.
- the multiplexed data is subjected to spread spectrum processing by the modulation / demodulation unit (modulation / demodulation circuit unit) ex352, digital-analog conversion processing and frequency conversion processing by the transmission / reception unit ex351, and then transmitted via the antenna ex350.
- the multiplexing / separating unit ex353 separates the multiplexed data into a video data bit stream and an audio data bit stream, and performs video signal processing on the video data encoded via the synchronization bus ex370.
- the encoded audio data is supplied to the audio signal processing unit ex354 while being supplied to the unit ex355.
- the video signal processing unit ex355 decodes the video signal by decoding using the video decoding method corresponding to the video encoding method described in each of the above embodiments (that is, an image according to an aspect of the present invention).
- video and still images included in the moving image file linked to the home page are displayed from the display unit ex358 via the LCD control unit ex359.
- the audio signal processing unit ex354 decodes the audio signal, and the audio is output from the audio output unit ex357.
- the terminal such as the mobile phone ex114 is referred to as a transmission terminal having only an encoder and a receiving terminal having only a decoder.
- a transmission terminal having only an encoder
- a receiving terminal having only a decoder.
- multiplexed data in which music data or the like is multiplexed with video data is received and transmitted, but data in which character data or the like related to video is multiplexed in addition to audio data It may be video data itself instead of multiplexed data.
- the moving picture encoding method or the moving picture decoding method shown in each of the above embodiments can be used in any of the above-described devices / systems. The described effect can be obtained.
- multiplexed data obtained by multiplexing audio data or the like with video data is configured to include identification information indicating which standard the video data conforms to.
- identification information indicating which standard the video data conforms to.
- FIG. 27 is a diagram showing a structure of multiplexed data.
- multiplexed data is obtained by multiplexing one or more of a video stream, an audio stream, a presentation graphics stream (PG), and an interactive graphics stream.
- the video stream indicates the main video and sub-video of the movie
- the audio stream (IG) indicates the main audio portion of the movie and the sub-audio mixed with the main audio
- the presentation graphics stream indicates the subtitles of the movie.
- the main video indicates a normal video displayed on the screen
- the sub-video is a video displayed on a small screen in the main video.
- the interactive graphics stream indicates an interactive screen created by arranging GUI components on the screen.
- the video stream is encoded by the moving image encoding method or apparatus shown in the above embodiments, or the moving image encoding method or apparatus conforming to the conventional standards such as MPEG-2, MPEG4-AVC, and VC-1. ing.
- the audio stream is encoded by a method such as Dolby AC-3, Dolby Digital Plus, MLP, DTS, DTS-HD, or linear PCM.
- Each stream included in the multiplexed data is identified by PID. For example, 0x1011 for video streams used for movie images, 0x1100 to 0x111F for audio streams, 0x1200 to 0x121F for presentation graphics, 0x1400 to 0x141F for interactive graphics streams, 0x1B00 to 0x1B1F are assigned to the video stream used for the sub-picture, and 0x1A00 to 0x1A1F are assigned to the audio stream used for the sub-audio mixed with the main audio.
- FIG. 28 is a diagram schematically showing how multiplexed data is multiplexed.
- a video stream ex235 composed of a plurality of video frames and an audio stream ex238 composed of a plurality of audio frames are converted into PES packet sequences ex236 and ex239, respectively, and converted into TS packets ex237 and ex240.
- the data of the presentation graphics stream ex241 and interactive graphics ex244 are converted into PES packet sequences ex242 and ex245, respectively, and further converted into TS packets ex243 and ex246.
- the multiplexed data ex247 is configured by multiplexing these TS packets into one stream.
- FIG. 29 shows in more detail how the video stream is stored in the PES packet sequence.
- the first row in FIG. 29 shows a video frame sequence of the video stream.
- the second level shows a PES packet sequence.
- a plurality of Video Presentation Units in the video stream are divided into pictures, B pictures, and P pictures, and are stored in the payload of the PES packet.
- Each PES packet has a PES header, and a PTS (Presentation Time-Stamp) that is a display time of a picture and a DTS (Decoding Time-Stamp) that is a decoding time of a picture are stored in the PES header.
- PTS Presentation Time-Stamp
- DTS Decoding Time-Stamp
- FIG. 30 shows the format of the TS packet that is finally written in the multiplexed data.
- the TS packet is a 188-byte fixed-length packet composed of a 4-byte TS header having information such as a PID for identifying a stream and a 184-byte TS payload for storing data.
- the PES packet is divided and stored in the TS payload.
- a 4-byte TP_Extra_Header is added to a TS packet, forms a 192-byte source packet, and is written in multiplexed data.
- TP_Extra_Header information such as ATS (Arrival_Time_Stamp) is described.
- ATS indicates the transfer start time of the TS packet to the PID filter of the decoder.
- Source packets are arranged in the multiplexed data as shown in the lower part of FIG. 30, and a number incremented from the head of the multiplexed data is called an SPN (source packet number).
- TS packets included in the multiplexed data include PAT (Program Association Table), PMT (Program Map Table), PCR (Program Clock Reference), and the like in addition to each stream such as video / audio / caption.
- PAT indicates what the PID of the PMT used in the multiplexed data is, and the PID of the PAT itself is registered as 0.
- the PMT has the PID of each stream such as video / audio / subtitles included in the multiplexed data and the attribute information of the stream corresponding to each PID, and has various descriptors related to the multiplexed data.
- the descriptor includes copy control information for instructing permission / non-permission of copying of multiplexed data.
- the PCR corresponds to the ATS in which the PCR packet is transferred to the decoder. Contains STC time information.
- FIG. 31 is a diagram for explaining the data structure of the PMT in detail.
- a PMT header describing the length of data included in the PMT is arranged at the head of the PMT.
- a plurality of descriptors related to multiplexed data are arranged.
- the copy control information and the like are described as descriptors.
- a plurality of pieces of stream information regarding each stream included in the multiplexed data are arranged.
- the stream information includes a stream descriptor in which a stream type, a stream PID, and stream attribute information (frame rate, aspect ratio, etc.) are described to identify a compression codec of the stream.
- the multiplexed data is recorded together with the multiplexed data information file.
- the multiplexed data information file is management information of multiplexed data, has one-to-one correspondence with the multiplexed data, and includes multiplexed data information, stream attribute information, and an entry map.
- the multiplexed data information includes a system rate, a reproduction start time, and a reproduction end time as shown in FIG.
- the system rate indicates a maximum transfer rate of multiplexed data to a PID filter of a system target decoder described later.
- the ATS interval included in the multiplexed data is set to be equal to or less than the system rate.
- the playback start time is the PTS of the first video frame of the multiplexed data
- the playback end time is set by adding the playback interval for one frame to the PTS of the video frame at the end of the multiplexed data.
- attribute information about each stream included in the multiplexed data is registered for each PID.
- the attribute information has different information for each video stream, audio stream, presentation graphics stream, and interactive graphics stream.
- the video stream attribute information includes the compression codec used to compress the video stream, the resolution of the individual picture data constituting the video stream, the aspect ratio, and the frame rate. It has information such as how much it is.
- the audio stream attribute information includes the compression codec used to compress the audio stream, the number of channels included in the audio stream, the language supported, and the sampling frequency. With information. These pieces of information are used for initialization of the decoder before the player reproduces it.
- the stream type included in the PMT is used.
- video stream attribute information included in the multiplexed data information is used.
- the video encoding shown in each of the above embodiments for the stream type or video stream attribute information included in the PMT.
- FIG. 34 shows the steps of the moving picture decoding method according to the present embodiment.
- step exS100 the stream type included in the PMT or the video stream attribute information included in the multiplexed data information is acquired from the multiplexed data.
- step exS101 it is determined whether or not the stream type or the video stream attribute information indicates multiplexed data generated by the moving picture encoding method or apparatus described in the above embodiments. To do.
- step exS102 the above embodiments are performed. Decoding is performed by the moving picture decoding method shown in the form.
- the conventional information Decoding is performed by a moving image decoding method compliant with the standard.
- FIG. 35 shows the configuration of an LSI ex500 that is made into one chip.
- the LSI ex500 includes elements ex501, ex502, ex503, ex504, ex505, ex506, ex507, ex508, and ex509 described below, and each element is connected via a bus ex510.
- the power supply circuit unit ex505 is activated to an operable state by supplying power to each unit when the power supply is on.
- the LSI ex500 uses the AV I / O ex509 to perform the microphone ex117 and the camera ex113 based on the control of the control unit ex501 including the CPU ex502, the memory controller ex503, the stream controller ex504, the driving frequency control unit ex512, and the like.
- the AV signal is input from the above.
- the input AV signal is temporarily stored in an external memory ex511 such as SDRAM.
- the accumulated data is divided into a plurality of times as appropriate according to the processing amount and the processing speed and sent to the signal processing unit ex507, and the signal processing unit ex507 encodes an audio signal and / or video. Signal encoding is performed.
- the encoding process of the video signal is the encoding process described in the above embodiments.
- the signal processing unit ex507 further performs processing such as multiplexing the encoded audio data and the encoded video data according to circumstances, and outputs the result from the stream I / Oex 506 to the outside.
- the output multiplexed data is transmitted to the base station ex107 or written to the recording medium ex215. It should be noted that data should be temporarily stored in the buffer ex508 so as to be synchronized when multiplexing.
- the memory ex511 is described as an external configuration of the LSI ex500.
- a configuration included in the LSI ex500 may be used.
- the number of buffers ex508 is not limited to one, and a plurality of buffers may be provided.
- the LSI ex500 may be made into one chip or a plurality of chips.
- control unit ex501 includes the CPU ex502, the memory controller ex503, the stream controller ex504, the drive frequency control unit ex512, and the like, but the configuration of the control unit ex501 is not limited to this configuration.
- the signal processing unit ex507 may further include a CPU.
- the CPU ex502 may be configured to include a signal processing unit ex507 or, for example, an audio signal processing unit that is a part of the signal processing unit ex507.
- the control unit ex501 is configured to include a signal processing unit ex507 or a CPU ex502 having a part thereof.
- LSI LSI
- IC system LSI
- super LSI ultra LSI depending on the degree of integration
- the method of circuit integration is not limited to LSI, and implementation with a dedicated circuit or a general-purpose processor is also possible.
- An FPGA Field Programmable Gate Array
- a reconfigurable processor that can reconfigure the connection and setting of circuit cells inside the LSI may be used.
- FIG. 36 shows a configuration ex800 in the present embodiment.
- the drive frequency switching unit ex803 sets the drive frequency high when the video data is generated by the moving image encoding method or apparatus described in the above embodiments.
- the decoding processing unit ex801 that executes the moving picture decoding method described in each of the above embodiments is instructed to decode the video data.
- the video data is video data compliant with the conventional standard, compared to the case where the video data is generated by the moving picture encoding method or apparatus shown in the above embodiments, Set the drive frequency low. Then, it instructs the decoding processing unit ex802 compliant with the conventional standard to decode the video data.
- the drive frequency switching unit ex803 includes a CPU ex502 and a drive frequency control unit ex512 in FIG.
- the decoding processing unit ex801 that executes the moving picture decoding method shown in each of the above embodiments and the decoding processing unit ex802 that complies with the conventional standard correspond to the signal processing unit ex507 in FIG.
- the CPU ex502 identifies which standard the video data conforms to. Then, based on the signal from the CPU ex502, the drive frequency control unit ex512 sets the drive frequency. Further, based on the signal from the CPU ex502, the signal processing unit ex507 decodes the video data.
- the identification information described in the fifth embodiment may be used.
- the identification information is not limited to that described in the fifth embodiment, and any information that can identify which standard the video data conforms to may be used. For example, it is possible to identify which standard the video data conforms to based on an external signal that identifies whether the video data is used for a television or a disk. In some cases, identification may be performed based on such an external signal.
- the selection of the driving frequency in the CPU ex502 may be performed based on, for example, a lookup table in which video data standards and driving frequencies are associated with each other as shown in FIG. The look-up table is stored in the buffer ex508 or the internal memory of the LSI, and the CPU ex502 can select the drive frequency by referring to the look-up table.
- FIG. 37 shows steps for executing the method of the present embodiment.
- the signal processing unit ex507 acquires identification information from the multiplexed data.
- the CPU ex502 identifies whether the video data is generated by the encoding method or apparatus described in each of the above embodiments based on the identification information.
- the CPU ex502 sends a signal for setting the drive frequency high to the drive frequency control unit ex512. Then, the drive frequency control unit ex512 sets a high drive frequency.
- step exS203 the CPU ex502 drives the signal for setting the drive frequency low. This is sent to the frequency control unit ex512. Then, in the drive frequency control unit ex512, the drive frequency is set to be lower than that in the case where the video data is generated by the encoding method or apparatus described in the above embodiments.
- the power saving effect can be further enhanced by changing the voltage applied to the LSI ex500 or the device including the LSI ex500 in conjunction with the switching of the driving frequency. For example, when the drive frequency is set low, it is conceivable that the voltage applied to the LSI ex500 or the device including the LSI ex500 is set low as compared with the case where the drive frequency is set high.
- the setting method of the driving frequency may be set to a high driving frequency when the processing amount at the time of decoding is large, and to a low driving frequency when the processing amount at the time of decoding is small. It is not limited to the method.
- the amount of processing for decoding video data compliant with the MPEG4-AVC standard is larger than the amount of processing for decoding video data generated by the moving picture encoding method or apparatus described in the above embodiments. It is conceivable that the setting of the driving frequency is reversed to that in the case described above.
- the method for setting the drive frequency is not limited to the configuration in which the drive frequency is lowered.
- the voltage applied to the LSIex500 or the apparatus including the LSIex500 is set high.
- the driving of the CPU ex502 is stopped.
- the CPU ex502 is temporarily stopped because there is room in processing. Is also possible. Even when the identification information indicates that the video data is generated by the moving image encoding method or apparatus described in each of the above embodiments, if there is a margin for processing, the CPU ex502 is temporarily driven. It can also be stopped. In this case, it is conceivable to set the stop time shorter than in the case where the video data conforms to the conventional standards such as MPEG-2, MPEG4-AVC, and VC-1.
- a plurality of video data that conforms to different standards may be input to the above-described devices and systems such as a television and a mobile phone.
- the signal processing unit ex507 of the LSI ex500 needs to support a plurality of standards in order to be able to decode even when a plurality of video data complying with different standards is input.
- the signal processing unit ex507 corresponding to each standard is used individually, there is a problem that the circuit scale of the LSI ex500 increases and the cost increases.
- a decoding processing unit for executing the moving picture decoding method shown in each of the above embodiments and a decoding conforming to a standard such as MPEG-2, MPEG4-AVC, or VC-1
- the processing unit is partly shared.
- An example of this configuration is shown as ex900 in FIG. 39A.
- the moving picture decoding method shown in each of the above embodiments and the moving picture decoding method compliant with the MPEG4-AVC standard are processed in processes such as entropy coding, inverse quantization, deblocking filter, and motion compensation. Some contents are common.
- the decoding processing unit ex902 corresponding to the MPEG4-AVC standard is shared, and for other processing contents specific to one aspect of the present invention that do not correspond to the MPEG4-AVC standard, a dedicated decoding processing unit A configuration using ex901 is conceivable.
- the decoding processing unit for executing the moving picture decoding method described in each of the above embodiments is shared, and the processing content specific to the MPEG4-AVC standard As for, a configuration using a dedicated decoding processing unit may be used.
- ex1000 in FIG. 39B shows another example in which processing is partially shared.
- a dedicated decoding processing unit ex1001 corresponding to the processing content specific to one aspect of the present invention
- a dedicated decoding processing unit ex1002 corresponding to the processing content specific to another conventional standard
- a common decoding processing unit ex1003 corresponding to the processing contents common to the moving image decoding method according to the above and other conventional moving image decoding methods.
- the dedicated decoding processing units ex1001 and ex1002 are not necessarily specialized in one aspect of the present invention or processing content specific to other conventional standards, and can execute other general-purpose processing. Also good.
- the configuration of the present embodiment can be implemented by LSI ex500.
- the processing content common to the moving picture decoding method according to one aspect of the present invention and the moving picture decoding method of the conventional standard reduces the circuit scale of the LSI by sharing the decoding processing unit, In addition, the cost can be reduced.
- each component may be configured by dedicated hardware or may be realized by executing a software program suitable for each component.
- Each component may be realized by a program execution unit such as a CPU or a processor reading and executing a software program recorded on a recording medium such as a hard disk or a semiconductor memory.
- the software that realizes the image decoding apparatus of each of the above embodiments is the following program.
- this program causes a computer to execute each step of the deblocking filtering method.
- the image processing method according to the present invention can be applied to any multimedia data compression / decoding process.
- the image processing method according to the present invention is useful as a compression / decoding process in storage, transmission, communication, etc. using, for example, a mobile phone, a DVD device, and a personal computer.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
- Image Processing (AREA)
Abstract
Description
ハイブリッド動画像符号化処理において、動画像符号化装置は、一般的に、予測処理を実行して予測画像データを生成し、入力画像データと予測画像データとの残差画像データに対し、変換処理または量子化処理またはその両方を実行する。予測処理では、一般的に、空間予測や時間予測が用いられる。空間予測では、既に符号化済みのブロックのうち、空間的に近いブロックを用いて予測が行われる。時間予測では、既に符号化済みのブロックのうち、時間的に近いブロックを用いて予測が行われる。変換処理では、予測残差データ(予測残差ブロック)が空間(画素)領域から周波数領域に変換され、変換係数が生成される。この変換の目的は、入力ブロックの相関を低減することである。量子化処理では、変換係数の量子化が行われ、量子化係数が生成される。量子化は、不可逆的圧縮により行われる。動画像符号化装置は、一般的に、量子化係数に対しエントロピー符号化を行い、既に圧縮されている量子化係数をさらに圧縮する(可逆的に圧縮する)ことにより、符号化ビデオ信号を生成する。さらに、動画像符号化装置は、符号化ビットストリームを復号するために必要な復号制御情報を符号化する。この復号制御情報は、例えば、空間予測および/または時間予測や量子化量等に関する情報である。動画像符号化装置は、符号化ビデオ信号と復号制御情報を含む符号化ビットストリームを生成する。
図1は、H.264/MPEG-4 AVCまたはHEVCを用いた動画像符号化装置の構成例を示すブロック図である。
以下、デブロッキングフィルタを用いたフィルタリング処理の詳細について、図2A~図5を基に説明する。
デブロッキングフィルタを用いたフィルタリング処理は、ブロックノイズによるブロック境界のエッジに対して適用し、ブロックノイズではない入力画像のエッジには適用しないことが望ましい。これは、例えば、ブロックノイズではない入力画像のエッジにデブロッキングフィルタを用いたフィルタリング処理を適用すると、画像が不必要に滑らかになったり、画像の歪みが生じたりする可能性があるからである。また、ブロックノイズによるブロック境界のエッジに対しデブロッキングフィルタを用いたフィルタリング処理が実行されないと、ブロックノイズが残る場合がある。



上述した判定処理により、フィルタリング処理を実行すると判定された場合、強度の異なる複数のデブロッキングフィルタから、使用するデブロッキングフィルタを選択する選択処理を実行する。
以上、比較例におけるフィルタリング処理について説明した。
実施の形態1の画像処理方法および画像処理装置について、図1~図3B、図7A~図9を用いて説明する。なお、本実施の形態では、画像処理方法および画像処理装置は、動画像符号化方法および動画像符号化装置に適用される場合を例に説明する。
以下、本実施の形態のデブロッキングフィルタ処理部150によるフィルタリング処理の詳細について、図2A~図3B、図7A~図9を基に説明する。
上述した判定処理により、フィルタリング処理を実行すると判定された場合、強度の異なる複数のデブロッキングフィルタから、使用するデブロッキングフィルタを選択する選択処理を実行する。

上述したように、図4Aに示すステップS130において、式11を用いた決定により「強いフィルタ」が選択された場合、第一デブロッキングフィルタ151により、強いフィルタリングが行われる(S132)。具体的には、第一デブロッキングフィルタ151は、HEVCモデルに従い、画素p3i、p2i、p1i、p0i、q0i、q1i、q2i、q3iを用いて画素p2i、p1i、p0i、q0i、q1i、q2iをフィルタリングする。



上述したように、図4Aに示すステップS130において、式12を用いた決定により「弱いフィルタ」が選択された場合、広帯域の第二デブロッキングフィルタ152により、弱いフィルタリングが行われる(S134)。



上述した比較例では、ループフィルタの閾値tcを求めるのに、テーブル関数を用いているため、メモリの使用領域を低減し、処理量を低減することが困難であった。これに対し、本実施の形態では、ループフィルタの閾値tcは、量子化パラメータQPと境界強度BSとの線形和を用いた関数で求められる。また、tc_offsetは、BSに基づいて求められるため、算出の労力を必要としないと言える。このため、メモリの使用領域を低減し、処理量を低減することが可能になる。
本実施の形態の変形例1について、図13~図15を基に説明する。
本実施の形態の変形例2について、図16を基に説明する。
本実施の形態の変形例3について、図17を基に説明する。
本実施の形態の変形例4について、図18Aおよび図18Bを基に説明する。
実施の形態2の動画像復号方法および動画像復号装置について、図19を基に説明する。
実施の形態3の動画像符号化方法および動画像符号化装置について、図20を基に説明する。
上記各実施の形態で示した動画像符号化方法(画像符号化方法)または動画像復号化方法(画像復号方法)の構成を実現するためのプログラムを記憶メディアに記録することにより、上記各実施の形態で示した処理を独立したコンピュータシステムにおいて簡単に実施することが可能となる。記憶メディアは、磁気ディスク、光ディスク、光磁気ディスク、ICカード、半導体メモリ等、プログラムを記録できるものであればよい。
上記各実施の形態で示した動画像符号化方法または装置と、MPEG-2、MPEG4-AVC、VC-1など異なる規格に準拠した動画像符号化方法または装置とを、必要に応じて適宜切替えることにより、映像データを生成することも可能である。
上記各実施の形態で示した動画像符号化方法および装置、動画像復号化方法および装置は、典型的には集積回路であるLSIで実現される。一例として、図35に1チップ化されたLSIex500の構成を示す。LSIex500は、以下に説明する要素ex501、ex502、ex503、ex504、ex505、ex506、ex507、ex508、ex509を備え、各要素はバスex510を介して接続している。電源回路部ex505は電源がオン状態の場合に各部に対して電力を供給することで動作可能な状態に起動する。
上記各実施の形態で示した動画像符号化方法または装置によって生成された映像データを復号する場合、従来のMPEG-2、MPEG4-AVC、VC-1などの規格に準拠する映像データを復号する場合に比べ、処理量が増加することが考えられる。そのため、LSIex500において、従来の規格に準拠する映像データを復号する際のCPUex502の駆動周波数よりも高い駆動周波数に設定する必要がある。しかし、駆動周波数を高くすると、消費電力が高くなるという課題が生じる。
テレビや、携帯電話など、上述した機器・システムには、異なる規格に準拠する複数の映像データが入力される場合がある。このように、異なる規格に準拠する複数の映像データが入力された場合にも復号できるようにするために、LSIex500の信号処理部ex507が複数の規格に対応している必要がある。しかし、それぞれの規格に対応する信号処理部ex507を個別に用いると、LSIex500の回路規模が大きくなり、また、コストが増加するという課題が生じる。
105 減算部
110 変換部
120 量子化部
130 逆量子化/逆変換部
140 加算部
150 デブロッキングフィルタ処理部
151 第一デブロッキングフィルタ
152 第二デブロッキングフィルタ
153 フィルタ制御部
154 境界強度算出部
155 Tc算出部
156 フィルタ選択部
160 サンプル適応オフセット処理部
165 適応ループフィルタ処理部
170 フレームメモリ
180 予測部
190 エントロピー符号化部
200 動画像復号装置
290 エントロピー復号部
230 逆量子化/逆変換部
240 加算部
250 デブロッキングフィルタ処理部
260 サンプル適応オフセット処理部
255 適応ループフィルタ処理部
270 フレームメモリ
280 予測部
310 水平デブロッキングフィルタ処理部
320 垂直デブロッキングフィルタ処理部
Claims (14)
- フィルタ強度の異なる複数のデブロッキングフィルタを用いて画像ブロックに対するフィルタリング処理を行う画像処理方法であって、
隣接する2つの画像ブロック間の境界強度を示す第一パラメータを算出する第一パラメータ算出ステップと、
前記第一パラメータ及び量子化パラメータに基づき、前記デブロッキングフィルタの制限値を示す第二パラメータを算出する第二パラメータ算出ステップと、
前記第二パラメータに基づき決定される1または複数の閾値を用いて、前記複数のデブロッキングフィルタから前記フィルタリング処理で用いるデブロッキングフィルタを選択する選択ステップとを含む
画像処理方法。 - 前記第二パラメータ算出ステップでは、前記第二パラメータは、前記第一パラメータと前記量子化パラメータとの線形和を用いて算出される
請求項1記載の画像処理方法。 - 前記第二パラメータ算出ステップでは、前記第二パラメータは、前記第一パラメータの値が大きいほど値が大きくなるように算出される
請求項1または2に記載の画像処理方法。 - 前記第二パラメータ算出ステップでは、前記第二パラメータは、前記量子化パラメータの値が大きいほど値が大きくなるように算出される
請求項3に記載の画像処理方法。 - 前記選択ステップでは、前記閾値は、前記第二パラメータの値が大きいほど値が大きくなるように算出される
請求項1~4の何れか1項に記載の画像処理方法。 - 前記選択ステップでは、
前記複数のデブロッキングフィルタから1つのデブロッキングフィルタを選択するための第一閾値と、デブロッキングフィルタを選択するか否かを判定するための第二閾値とが決定され、
前記複数のデブロッキングフィルタから1つのブロッキングフィルタを選択する、あるいは、デブロッキングフィルタを使用しないことを選択する
請求項1~5の何れか1項に記載の画像処理方法。 - 前記選択ステップの実行前に、前記第一パラメータを用いて、前記フィルタリング処理を行うか否かを判定する実行可否判定ステップを含む
請求項1~6の何れか1項に記載の画像処理方法。 - 前記第一パラメータ算出ステップは、
前記隣接する2つの画像ブロックの少なくとも一方がイントラ符号化されるブロックであるか否かを判定する第一判定ステップと、
前記第一判定ステップにおいて、前記隣接する2つの画像ブロックの少なくとも一方がイントラ符号化されると判定された場合、前記第一パラメータに第一固定値を設定するステップとを有する
請求項1~7の何れか1項に記載の画像処理方法。 - 前記第一パラメータ算出ステップは、さらに、
前記第一判定ステップにおいて、前記隣接する2つの画像ブロックの両方がイントラ符号化されないブロックであると判定された場合、前記第一パラメータに、前記第一固定値とは異なる第二固定値を設定するステップを有する
請求項8に記載の画像処理方法。 - 前記第一パラメータ算出ステップは、さらに、
前記第一判定ステップにおいて、前記隣接する2つの画像ブロックの両方がイントラ符号化されないブロックであると判定された場合、さらに、前記隣接する2つの画像ブロックの少なくとも一方が、少なくとも1つの非ゼロ変換係数を含むか否かを判定する第二判定ステップと、
前記第二判定ステップの判定結果を用いて、前記第一パラメータの値を設定するステップとを有する
請求項8に記載の画像処理方法。 - 前記第一パラメータ算出ステップは、さらに、前記第一判定ステップで前記隣接する2つの画像ブロックの両方がイントラ符号化されないブロックであると判定された場合において、
前記隣接する2つの画像ブロックの少なくとも一方が、少なくとも1つの非ゼロ変換係数を含むか否かを判定する第二判定ステップと、
前記隣接する2つの画像ブロックで、インター符号化における参照ピクチャを示す参照インデックスが異なるか否かを判定する第三判定ステップと、
前記隣接する2つの画像ブロック間で、水平動きベクトル成分の差分絶対値及び垂直動きベクトル成分の差分絶対値の少なくとも一方の差分絶対値が、所定の閾値を超えるか否かを判定する第四判定ステップと、
前記第二判定ステップにおいて少なくとも1つの非ゼロ変換係数を含むと判定され、且つ、前記第三判定ステップにおいて参照ピクチャインデックスが同じであると判定され、且つ、前記第四判定ステップにおいて差分絶対値が前記所定の閾値を超えると判定された場合に、前記第一パラメータに前記第一固定値を設定し、その他の場合に、前記第一パラメータに前記第一固定値とは異なる第二固定値を設定する設定ステップとを有する
請求項8に記載の画像処理方法。 - 前記画像処理方法は、
複数の画素で構成される符号化対象ブロックと予測ブロックとの予測誤差ブロックを圧縮する圧縮ステップと、
圧縮された前記予測誤差ブロックを復号し前記予測ブロックを加算して再構成ブロックを生成する再構成ステップと、
前記再構成ブロックに対し、前記第一パラメータ算出ステップと、前記第二パラメータ算出ステップと、前記選択ステップとを実行するフィルタリングステップと、
フィルタリングステップが実行された後の前記再構成ブロックを用いて予測ブロックを生成する予測ステップと、
圧縮された前記予測誤差ブロックを符号化することにより符号化ビットストリームを生成する符号化ステップとを有する
請求項1~11の何れか1項に記載の画像処理方法。 - 前記画像処理方法は、
復号対象ブロックを含む符号化ビットストリームを取得する取得ステップと、
前記復号対象ブロックを復号し予測ブロックを加算することにより再構成ブロックを生成するステップと、
前記再構成ブロックに対し、前記第一パラメータ算出ステップと、前記第二パラメータ算出ステップと、前記選択ステップとを実行するフィルタリングステップと、
フィルタリングステップが実行された後の前記再構成ブロックを用いて予測ブロックを生成する予測ステップとを有する
請求項1~11の何れか1項に記載の画像処理方法。 - フィルタ強度の異なる複数のデブロッキングフィルタを用いて画像ブロックに対するフィルタリング処理を行う画像処理装置であって、
隣接する2つの画像ブロック間の境界強度を示す第一パラメータを算出する第一パラメータ算出部と、
前記第一パラメータ及び量子化パラメータに基づき、前記デブロッキングフィルタの制限値を示す第二パラメータを算出する第二パラメータ算出部と、
前記第二パラメータに基づき決定される閾値を用いて、前記複数のデブロッキングフィルタから前記フィルタリング処理で用いるデブロッキングフィルタを選択する選択部とを備え、
前記第二パラメータ算出部は、前記第一パラメータと前記量子化パラメータとの合計を前記第二パラメータの値として算出する
画像処理装置。
Priority Applications (10)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CA2840036A CA2840036C (en) | 2011-11-25 | 2012-11-21 | Image processing method and image processing apparatus |
| CN201280029993.4A CN103621097B (zh) | 2011-11-25 | 2012-11-21 | 图像处理方法及图像处理装置 |
| MX2013014207A MX2013014207A (es) | 2011-11-25 | 2012-11-21 | Metodo de procesamiento de imagenes y aparato de procesamiento de imagenes. |
| KR1020177032964A KR102094939B1 (ko) | 2011-11-25 | 2012-11-21 | 화상 처리 방법 및 화상 처리 장치 |
| PL12852002T PL2785057T3 (pl) | 2011-11-25 | 2012-11-21 | Sposób przetwarzania obrazów i urządzenie do przetwarzania obrazów |
| BR112013032615A BR112013032615A2 (pt) | 2011-11-25 | 2012-11-21 | método de processamento de imagem e aparelho de processamento de imagem |
| JP2013523113A JP5343178B1 (ja) | 2011-11-25 | 2012-11-21 | 画像処理方法および画像処理装置 |
| EP12852002.0A EP2785057B1 (en) | 2011-11-25 | 2012-11-21 | Image processing method and image processing device |
| ES12852002T ES2831999T3 (es) | 2011-11-25 | 2012-11-21 | Procedimiento de procesamiento de imágenes y dispositivo de procesamiento de imágenes |
| KR1020137033515A KR102061214B1 (ko) | 2011-11-25 | 2012-11-21 | 화상 처리 방법 및 화상 처리 장치 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161563695P | 2011-11-25 | 2011-11-25 | |
| US61/563,695 | 2011-11-25 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013076978A1 true WO2013076978A1 (ja) | 2013-05-30 |
Family
ID=48469441
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/007473 WO2013076978A1 (ja) | 2011-11-25 | 2012-11-21 | 画像処理方法および画像処理装置 |
Country Status (13)
| Country | Link |
|---|---|
| US (8) | US9414064B2 (ja) |
| EP (1) | EP2785057B1 (ja) |
| JP (5) | JP5343178B1 (ja) |
| KR (2) | KR102061214B1 (ja) |
| CN (2) | CN108471532B (ja) |
| BR (1) | BR112013032615A2 (ja) |
| CA (1) | CA2840036C (ja) |
| ES (1) | ES2831999T3 (ja) |
| MX (1) | MX2013014207A (ja) |
| MY (1) | MY164978A (ja) |
| PL (1) | PL2785057T3 (ja) |
| TW (1) | TWI599213B (ja) |
| WO (1) | WO2013076978A1 (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160072181A (ko) * | 2013-10-14 | 2016-06-22 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩 및 디코딩을 위한 인트라 블록 카피 예측 모드의 피쳐 |
| JP2016116000A (ja) * | 2014-12-11 | 2016-06-23 | 日本電信電話株式会社 | デブロッキング処理方法、デブロッキング処理装置、コンピュータプログラム及び記録媒体 |
| US10368091B2 (en) | 2014-03-04 | 2019-07-30 | Microsoft Technology Licensing, Llc | Block flipping and skip mode in intra block copy prediction |
| US10390034B2 (en) | 2014-01-03 | 2019-08-20 | Microsoft Technology Licensing, Llc | Innovations in block vector prediction and estimation of reconstructed sample values within an overlap area |
| US10469863B2 (en) | 2014-01-03 | 2019-11-05 | Microsoft Technology Licensing, Llc | Block vector prediction in video and image coding/decoding |
| US10785486B2 (en) | 2014-06-19 | 2020-09-22 | Microsoft Technology Licensing, Llc | Unified intra block copy and inter prediction modes |
| US10812817B2 (en) | 2014-09-30 | 2020-10-20 | Microsoft Technology Licensing, Llc | Rules for intra-picture prediction modes when wavefront parallel processing is enabled |
| JP2020535683A (ja) * | 2017-10-09 | 2020-12-03 | キヤノン株式会社 | 画素ブロックをデブロッキングフィルタリングする方法および装置 |
| US10986349B2 (en) | 2017-12-29 | 2021-04-20 | Microsoft Technology Licensing, Llc | Constraints on locations of reference blocks for intra block copy prediction |
| US11109036B2 (en) | 2013-10-14 | 2021-08-31 | Microsoft Technology Licensing, Llc | Encoder-side options for intra block copy prediction mode for video and image coding |
| US11284103B2 (en) | 2014-01-17 | 2022-03-22 | Microsoft Technology Licensing, Llc | Intra block copy prediction with asymmetric partitions and encoder-side search patterns, search ranges and approaches to partitioning |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102061214B1 (ko) * | 2011-11-25 | 2019-12-31 | 선 페이턴트 트러스트 | 화상 처리 방법 및 화상 처리 장치 |
| TWI581623B (zh) | 2012-04-06 | 2017-05-01 | Sony Corp | Image processing apparatus and method, program, and recording medium |
| US10477208B2 (en) * | 2012-09-24 | 2019-11-12 | Intel Corporation | Histogram segmentation based local adaptive filter for video encoding and decoding |
| JP2014207536A (ja) * | 2013-04-12 | 2014-10-30 | ソニー株式会社 | 画像処理装置および方法 |
| US9408230B2 (en) | 2013-05-03 | 2016-08-02 | Qualcomm Incorporated | Transmit opportunity (TXOP) based channel reuse |
| JP6545515B2 (ja) | 2015-04-24 | 2019-07-17 | 株式会社東芝 | 画像復号装置 |
| US10681371B2 (en) * | 2015-06-07 | 2020-06-09 | Lg Electronics Inc. | Method and device for performing deblocking filtering |
| US10681347B2 (en) | 2015-09-29 | 2020-06-09 | Lg Electronics Inc. | Method and apparatus of filtering image in image coding system |
| JP7094076B2 (ja) | 2016-08-19 | 2022-07-01 | 沖電気工業株式会社 | 映像符号化装置、プログラム及び方法、並びに、映像復号装置、プログラム及び方法、並びに、映像伝送システム |
| JP7173961B2 (ja) | 2016-08-21 | 2022-11-16 | エルジー エレクトロニクス インコーポレイティド | 映像符号化/復号化方法及びそのための装置 |
| US20180091812A1 (en) * | 2016-09-23 | 2018-03-29 | Apple Inc. | Video compression system providing selection of deblocking filters parameters based on bit-depth of video data |
| KR102541882B1 (ko) * | 2016-12-27 | 2023-06-13 | 파나소닉 인텔렉츄얼 프로퍼티 코포레이션 오브 아메리카 | 부호화 장치, 복호 장치, 부호화 방법 및 복호 방법 |
| KR102524319B1 (ko) * | 2016-12-28 | 2023-04-24 | 소니그룹주식회사 | 화상 처리 장치 및 화상 처리 방법 |
| TWI833248B (zh) * | 2017-04-06 | 2024-02-21 | 美商松下電器(美國)知識產權公司 | 解碼方法及編碼方法 |
| CN107316276B (zh) * | 2017-06-30 | 2020-12-11 | 京东方科技集团股份有限公司 | 用于对图像进行拉伸的方法及装置 |
| US10645408B2 (en) * | 2017-09-17 | 2020-05-05 | Google Llc | Dual deblocking filter thresholds |
| CN117640951A (zh) * | 2018-05-23 | 2024-03-01 | 松下电器(美国)知识产权公司 | 解码装置和编码装置 |
| US20200068223A1 (en) * | 2018-08-27 | 2020-02-27 | Qualcomm Incorporated | Deblocking filter for video coding and processing |
| US11356699B2 (en) * | 2019-01-11 | 2022-06-07 | Hfi Innovation Inc. | Method and apparatus of sub-block deblocking in video coding |
| BR112021014861A2 (pt) | 2019-02-27 | 2021-10-05 | Telefonaktiebolaget Lm Ericsson (Publ) | Método e aparelho para desbloquear pelo menos um contorno vertical ou horizontal de uma unidade de codificação, e, portadora |
| WO2023113224A1 (ko) * | 2021-12-17 | 2023-06-22 | 현대자동차주식회사 | 매핑 기반 비디오 코딩에서 인루프 필터링 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080025632A1 (en) | 2004-10-13 | 2008-01-31 | Tandberg Telecom As | Deblocking filter |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4227160B2 (ja) * | 2000-10-20 | 2009-02-18 | パナソニック株式会社 | ブロック歪み除去方法 |
| US7929610B2 (en) * | 2001-03-26 | 2011-04-19 | Sharp Kabushiki Kaisha | Methods and systems for reducing blocking artifacts with reduced complexity for spatially-scalable video coding |
| US7518646B2 (en) * | 2001-03-26 | 2009-04-14 | Panavision Imaging Llc | Image sensor ADC and CDS per column |
| ATE419713T1 (de) | 2001-11-29 | 2009-01-15 | Panasonic Corp | Verfahren zur beseitigung von kodierungsverzerrung und verfahren zur videokodierung und -dekodierung |
| ES2467940T3 (es) | 2001-11-29 | 2014-06-13 | Panasonic Corporation | Método de extracción de distorsión de codificación |
| JP2003244190A (ja) * | 2002-02-19 | 2003-08-29 | Matsushita Electric Ind Co Ltd | データフロー制御スイッチ用プロセッサ及びデータフロー制御スイッチ |
| US7227901B2 (en) * | 2002-11-21 | 2007-06-05 | Ub Video Inc. | Low-complexity deblocking filter |
| US7167522B2 (en) | 2003-02-27 | 2007-01-23 | Texas Instruments Incorporated | Video deblocking filter |
| JP2004328634A (ja) * | 2003-04-28 | 2004-11-18 | Sony Corp | 画像復号化装置及び方法 |
| US7460596B2 (en) * | 2004-04-29 | 2008-12-02 | Mediatek Incorporation | Adaptive de-blocking filtering apparatus and method for MPEG video decoder |
| KR100843196B1 (ko) * | 2004-12-17 | 2008-07-02 | 삼성전자주식회사 | H.264/avc 비디오 디코더의 디블록킹 필터 |
| JP4784188B2 (ja) * | 2005-07-25 | 2011-10-05 | ソニー株式会社 | 画像処理装置、画像処理方法およびプログラム |
| JP4825524B2 (ja) * | 2006-01-31 | 2011-11-30 | 株式会社東芝 | 動画像復号装置および動画像復号方法 |
| KR101370287B1 (ko) * | 2006-11-22 | 2014-03-07 | 세종대학교산학협력단 | 디블록킹 필터링 방법 및 장치 |
| RU2461977C2 (ru) * | 2006-12-18 | 2012-09-20 | Конинклейке Филипс Электроникс Н.В. | Сжатие и снятие сжатия изображения |
| US7907789B2 (en) * | 2007-01-05 | 2011-03-15 | Freescale Semiconductor, Inc. | Reduction of block effects in spatially re-sampled image information for block-based image coding |
| CN100571391C (zh) * | 2007-05-09 | 2009-12-16 | 安凯(广州)软件技术有限公司 | 用于视频编解码系统中解块滤波的并行处理方法 |
| CN101389016B (zh) * | 2007-09-13 | 2010-10-20 | 华为技术有限公司 | 获得块边界强度和去除块效应的方法和装置 |
| JP2009194617A (ja) * | 2008-02-14 | 2009-08-27 | Sony Corp | 画像処理装置、画像処理方法、画像処理方法のプログラム及び画像処理方法のプログラムを記録した記録媒体 |
| CN102098501B (zh) * | 2009-12-09 | 2013-05-08 | 中兴通讯股份有限公司 | 一种视频图像去块效应的方法和装置 |
| US9185430B2 (en) * | 2010-03-15 | 2015-11-10 | Mediatek Singapore Pte. Ltd. | Deblocking filtering method and deblocking filter |
| US9503741B2 (en) | 2011-06-08 | 2016-11-22 | Vixs Systems, Inc. | Video decoder with multi-format vector processor and methods for use therewith |
| KR102067368B1 (ko) * | 2011-06-28 | 2020-01-16 | 소니 주식회사 | 화상 처리 장치 및 화상 처리 방법 |
| KR102061214B1 (ko) * | 2011-11-25 | 2019-12-31 | 선 페이턴트 트러스트 | 화상 처리 방법 및 화상 처리 장치 |
-
2012
- 2012-11-21 KR KR1020137033515A patent/KR102061214B1/ko active IP Right Grant
- 2012-11-21 US US13/683,093 patent/US9414064B2/en active Active
- 2012-11-21 WO PCT/JP2012/007473 patent/WO2013076978A1/ja active Application Filing
- 2012-11-21 JP JP2013523113A patent/JP5343178B1/ja active Active
- 2012-11-21 CA CA2840036A patent/CA2840036C/en active Active
- 2012-11-21 MY MYPI2013702451A patent/MY164978A/en unknown
- 2012-11-21 BR BR112013032615A patent/BR112013032615A2/pt not_active IP Right Cessation
- 2012-11-21 EP EP12852002.0A patent/EP2785057B1/en active Active
- 2012-11-21 PL PL12852002T patent/PL2785057T3/pl unknown
- 2012-11-21 CN CN201810244505.0A patent/CN108471532B/zh active Active
- 2012-11-21 ES ES12852002T patent/ES2831999T3/es active Active
- 2012-11-21 CN CN201280029993.4A patent/CN103621097B/zh active Active
- 2012-11-21 MX MX2013014207A patent/MX2013014207A/es active IP Right Grant
- 2012-11-21 KR KR1020177032964A patent/KR102094939B1/ko active IP Right Grant
- 2012-11-22 TW TW101143680A patent/TWI599213B/zh active
-
2013
- 2013-08-12 JP JP2013167659A patent/JP5386653B2/ja active Active
- 2013-08-29 US US14/013,676 patent/US9313499B2/en active Active
- 2013-09-13 JP JP2013190949A patent/JP6078921B2/ja active Active
-
2016
- 2016-01-29 US US15/010,499 patent/US10587895B2/en active Active
- 2016-01-29 US US15/010,546 patent/US9961371B2/en active Active
- 2016-12-28 JP JP2016256870A patent/JP2017085631A/ja active Pending
-
2018
- 2018-12-07 JP JP2018230170A patent/JP6799798B2/ja active Active
-
2019
- 2019-12-11 US US16/710,346 patent/US10924764B2/en active Active
-
2021
- 2021-01-13 US US17/147,800 patent/US11463731B2/en active Active
-
2022
- 2022-08-26 US US17/896,382 patent/US11895335B2/en active Active
-
2023
- 2023-12-19 US US18/545,219 patent/US20240146967A1/en active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080025632A1 (en) | 2004-10-13 | 2008-01-31 | Tandberg Telecom As | Deblocking filter |
Non-Patent Citations (4)
| Title |
|---|
| "WD3: Working Draft 3 of High-Efficiency Video Coding", JCTVC-E603, March 2011 (2011-03-01) |
| JCT-VC: "Common test conditions and software reference configurations", JCTVC-F900, July 2011 (2011-07-01) |
| JUNGYOUP YANG ET AL.: "CE12: SK Telecom/SKKU Deblocking Filter", JOINT COLLABORATIVE TEAM ON VIDEO CODING (JCT-VC) OF ITU-T SG16 WP3 AND ISO/IEC JTC1/SC29/WG11 6TH MEETING [JCTVC-F258], 14 July 2011 (2011-07-14) - 22 July 2011 (2011-07-22), TORINO, IT, XP030009281 * |
| See also references of EP2785057A4 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102257269B1 (ko) | 2013-10-14 | 2021-05-26 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩 및 디코딩을 위한 인트라 블록 카피 예측 모드의 피쳐 |
| JP2016539542A (ja) * | 2013-10-14 | 2016-12-15 | マイクロソフト テクノロジー ライセンシング,エルエルシー | ビデオ及び画像の符号化及び復号のためのイントラブロックコピー予測モードの特徴 |
| US10582213B2 (en) | 2013-10-14 | 2020-03-03 | Microsoft Technology Licensing, Llc | Features of intra block copy prediction mode for video and image coding and decoding |
| KR20160072181A (ko) * | 2013-10-14 | 2016-06-22 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩 및 디코딩을 위한 인트라 블록 카피 예측 모드의 피쳐 |
| KR102170169B1 (ko) | 2013-10-14 | 2020-10-26 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩 및 디코딩을 위한 인트라 블록 카피 예측 모드의 피쳐 |
| KR20200123268A (ko) * | 2013-10-14 | 2020-10-28 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩 및 디코딩을 위한 인트라 블록 카피 예측 모드의 피쳐 |
| US11109036B2 (en) | 2013-10-14 | 2021-08-31 | Microsoft Technology Licensing, Llc | Encoder-side options for intra block copy prediction mode for video and image coding |
| US10390034B2 (en) | 2014-01-03 | 2019-08-20 | Microsoft Technology Licensing, Llc | Innovations in block vector prediction and estimation of reconstructed sample values within an overlap area |
| US10469863B2 (en) | 2014-01-03 | 2019-11-05 | Microsoft Technology Licensing, Llc | Block vector prediction in video and image coding/decoding |
| US11284103B2 (en) | 2014-01-17 | 2022-03-22 | Microsoft Technology Licensing, Llc | Intra block copy prediction with asymmetric partitions and encoder-side search patterns, search ranges and approaches to partitioning |
| US10368091B2 (en) | 2014-03-04 | 2019-07-30 | Microsoft Technology Licensing, Llc | Block flipping and skip mode in intra block copy prediction |
| US10785486B2 (en) | 2014-06-19 | 2020-09-22 | Microsoft Technology Licensing, Llc | Unified intra block copy and inter prediction modes |
| US10812817B2 (en) | 2014-09-30 | 2020-10-20 | Microsoft Technology Licensing, Llc | Rules for intra-picture prediction modes when wavefront parallel processing is enabled |
| JP2016116000A (ja) * | 2014-12-11 | 2016-06-23 | 日本電信電話株式会社 | デブロッキング処理方法、デブロッキング処理装置、コンピュータプログラム及び記録媒体 |
| JP2020535683A (ja) * | 2017-10-09 | 2020-12-03 | キヤノン株式会社 | 画素ブロックをデブロッキングフィルタリングする方法および装置 |
| US10986349B2 (en) | 2017-12-29 | 2021-04-20 | Microsoft Technology Licensing, Llc | Constraints on locations of reference blocks for intra block copy prediction |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6799798B2 (ja) | 画像復号装置および画像復号方法 | |
| JP7361285B2 (ja) | 符号化方法および符号化装置 | |
| JP6422067B2 (ja) | 符号化方法、プログラムおよび符号化装置 | |
| JP6042304B2 (ja) | 符号化復号装置 | |
| JP5559918B2 (ja) | 画像を復号する装置、システム及び画像視聴方法 | |
| JP2017063452A (ja) | 画像復号方法および画像復号装置 | |
| WO2013073184A1 (ja) | 画像符号化方法、画像復号方法、画像符号化装置、画像復号装置、および画像符号化復号装置 | |
| WO2011132400A1 (ja) | 画像符号化方法及び画像復号化方法 | |
| WO2012035766A1 (ja) | 画像復号化方法、画像符号化方法、画像復号化装置、および画像符号化装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2013523113 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12852002 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: MX/A/2013/014207 Country of ref document: MX |
|
| ENP | Entry into the national phase |
Ref document number: 20137033515 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 2840036 Country of ref document: CA |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012852002 Country of ref document: EP |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112013032615 Country of ref document: BR |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 112013032615 Country of ref document: BR Kind code of ref document: A2 Effective date: 20131218 |