WO2012124686A1 - 爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置 - Google Patents
爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置 Download PDFInfo
- Publication number
- WO2012124686A1 WO2012124686A1 PCT/JP2012/056403 JP2012056403W WO2012124686A1 WO 2012124686 A1 WO2012124686 A1 WO 2012124686A1 JP 2012056403 W JP2012056403 W JP 2012056403W WO 2012124686 A1 WO2012124686 A1 WO 2012124686A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- region
- plot
- area
- nail
- threshold value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/90—Determination of colour characteristics
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/56—Extraction of image or video features relating to colour
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10024—Color image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20072—Graph-based image processing
Definitions
- the present invention relates to a nail region detection method, a program, a storage medium, and a nail region detection device for detecting a nail region from a finger image captured by a color camera.
- 3D hand shape estimation is more
- the information processing apparatus, the game apparatus or the like by using it accurately. For example, not only detecting the direction and amount of movement of the hand, but also detecting the “hand shape and posture” using the technology to detect the hand, so that it corresponds to the operation of the information processing device, game device, etc. It is requested.
- feature extraction is not performed from the image captured by the camera, and the input image and the image stored in the database for comparison are directly compared by the information processing device.
- a silhouette shape captured by a camera can be used as the input image, and the information processing apparatus can estimate an approximate finger silhouette shape from the displayed finger shape.
- Non-Patent Document 1 it is shown that nail position information is detected by a predetermined algorithm from a finger image in the example of one user, but the same algorithm is used from any user's finger image. Similarly, it is not confirmed whether the nail position information can be extracted, and it is not an algorithm for which universality and reproducibility are confirmed. Also, there is no mention of a method for efficiently assigning nail position information to silhouette shape information.
- Non-Patent Document 2 the efficiency of the structure of the database for collation was tried on the assumption that the nail position information could be accurately extracted, and a method for discriminating the nail region from the skin region of the finger image. Not listed.
- the position information of the nail region cannot be obtained from the skin region of the finger image for an arbitrary user, and the nail information is effectively added to the silhouette shape information, or the silhouette shape information The information on each nail position could not be assigned efficiently. Therefore, the conventional method cannot solve the difficulty of estimating the shape of the finger more accurately.
- the present invention can obtain position information of the nail region from the skin region of the finger image for any user, and can detect the finger shape more accurately. It is an object to provide a method, a program, a storage medium, and a nail region detection device.
- the nail area detection method includes a first plot area in which captured image data of a finger image captured by a color camera is plotted and converted on a first graph in a three-dimensional color space. Is performed a plurality of times while changing the threshold value along the value of one axis of the three-dimensional color space, and the two-dimensional At least one physical quantity or its ratio in the second plot area on the plane is detected, and a second plot area in which the slope of the amount of change in which the physical quantity or its ratio in the second plot area changes in each process is less than or equal to a predetermined value. At least determining a nail region.
- 1 is a block diagram showing a schematic configuration of a first embodiment according to the present invention. It is a figure which shows the change of the data area at the time of converting the image data of a finger from RGB color system to HLS color system in 1st Embodiment. It is a figure which shows the image data converted into the HLS color system of the 1st example of 1st Embodiment. It is a figure which shows the image data converted into the HLS color system of the 2nd example of 1st Embodiment. It is a figure which shows the image data converted into the HLS color system of the 3rd example of 1st Embodiment. It is a figure which shows the image data converted into the HLS color system of the 4th example of 1st Embodiment.
- a first plot area obtained by plotting and converting captured image data of a finger image captured by a color camera on a first graph in a three-dimensional color space
- the process of mapping to the second plot area of the two-dimensional plane is performed a plurality of times while changing the threshold value along the value of one axis of the three-dimensional color space.
- At least one physical quantity in the second plot area or a ratio thereof is detected, and the second plot area in which the gradient of the amount of change in which the physical quantity or the ratio of the second plot area changes in each process is equal to or less than a predetermined value is defined as the nail area. At least.
- the second plot area is determined as the nail area, the nail area can be reliably determined from the finger image, and the position of the nail can be easily assigned to the hand silhouette shape information, so that the finger shape can be more accurately determined. Can be estimated.
- the captured image data captured by the color camera including the user's fingers is converted from the color system used by the color camera to the table used by the color camera.
- a first step of converting to a predetermined color system expressed by three axes of three kinds of physical quantities different from the color system and plotting it on a first graph in a three-dimensional color space, and converting to the predetermined color system A second step of setting a threshold value parallel to the other axis along the value of one of the three axes for one or more first plot areas in which the plotted data is distributed;
- the second plot region is obtained by re-plotting only each plot data in the first plot region equal to or greater than the one-axis threshold value on a second graph on a two-dimensional plane orthogonal to the one axis at the threshold value.
- the physical quantity or its ratio in the second plot area where the data replotted above the threshold in the step is distributed is detected in the fourth step, and the gradient of the change in the physical quantity or its ratio is detected in the sixth step.
- the second plot area smaller than (for example, the smallest) area is determined as the nail area.
- the first step of the nail region detection method at least external edge removal and shadow influence removal are performed on the captured image data before plotting on the first graph in a three-dimensional color space.
- the effect of the shadow can be reduced by performing the gamma correction processing in the local area determined by the red bit value indicated by 8 bits.
- the physical quantity in the second plot region or the ratio thereof may be at least one axial length dimension.
- the length dimension in the axial direction may be the length dimension in the major axis direction which is the maximum dimension.
- the nail region of the finger image can be detected more easily, and the shape of the finger can be estimated more easily.
- the physical quantity or the ratio thereof in the second plot region may be an area.
- the area in the second plot region is dense in pixels after the smoothing process is performed on the second plot region. You may make it be the area of the image of a dense area.
- the area in the second plot region is dense in pixels after the smoothing process is performed on the second plot region.
- the dense area may be the area of the coarse area removed from the second plot area by exclusive OR.
- the ratio of the physical quantity in the second plot region is such that the pixels after the smoothing process is performed on the second plot region are dense.
- the ratio of the area of the dense region image and the area of the coarse region excluding the dense region from the second plot region may be used.
- the area in the second plot area is detected a plurality of times while changing the threshold value, and the gradient of the change amount of the area, the gradient of the change amount of the area of the dense region, or the change amount of the area of the coarse region Or determining the second plot area in which at least one of the gradient of the ratio of the ratio of the area of the image of the dense area and the area of the coarse area is smaller than the other area as the nail area,
- the nail area of the finger image can be easily detected, and the shape of the finger can be estimated more easily.
- the physical quantity in the second plot region or the ratio thereof may be the number of pixels.
- the number of pixels in the second plot region is the same as that after the smoothing process is performed on the second plot region.
- the number of pixels of an image in a certain dense area may be used.
- the number of pixels in the second plot region is the same as that after the smoothing process is performed on the second plot region.
- a certain dense area may be the number of pixels in the coarse area removed from the second plot area by exclusive OR.
- the ratio of the physical quantity in the second plot region is such that the pixels after performing the smoothing process on the second plot region are dense.
- the ratio of the number of pixels in the dense area image to the number of pixels in the coarse area excluding the dense area from the second plot area may be used.
- the number of pixels in the second plot area is detected a plurality of times while changing the threshold value, and the gradient of the variation in the number of pixels, the gradient of the variation in the number of pixels in the dense area, or the pixels in the coarse area
- the nail region is a second plot region in which at least one of the gradient of the number change amount or the gradient of the change amount ratio of the number of pixels in the dense region and the number of pixels in the coarse region is smaller than the other regions. It is possible to easily detect the nail region of the finger image and more easily estimate the shape of the finger.
- the first graph of the three-dimensional color space is a two-dimensional plane using two of the three axes of the three types of physical quantities. It may be a graph.
- the threshold value is set to a three-dimensional color by using a two-dimensional graph using two axes. Since it is not necessary to set the twisted direction in the space graph, the setting can be made easily. Therefore, the threshold setting can be automated or the threshold changing process can be easily performed, and the user can easily confirm by visually observing the display, and can recognize the second plot area and determine the nail area. Easy to do.
- the predetermined color system may include at least a hue.
- the finger and the nail can be distinguished more clearly than before by using the hue as the physical quantity of the color system used for nail detection.
- one axis along which the threshold value is aligned may be a hue.
- the threshold value is set or changed along one axis of hue, so that it is not necessary to consider the values of multiple axes every time it is set or changed. Easy to set up. Therefore, the threshold setting can be automated or the threshold changing process can be easily performed, and the user can easily confirm by visually observing the display, and can recognize the second plot area and determine the nail area. Easy to do.
- one axis of the threshold value is obtained from the first plot region by obtaining at least one of a maximum value and a minimum value in the one axis, You may make it set the initial value of the said threshold value outside the one side of the maximum value or the minimum value.
- an initial value of the threshold is set outside (greater than) the maximum value in one axis of the first plot region, or in the first axis of the first plot region. Since the initial value of the threshold value is set outside (smaller value) than the minimum value, and the third to sixth steps are performed, in the third step, each plot exceeding the threshold value in the first plot area Data can be replotted to the second graph without omission.
- the second plot region may be defined by repeating expansion processing and degeneration processing.
- expansion processing is performed on each plot data until the individual area of each plot data sufficiently overlaps with an individual area of other nearby plot data.
- the second plot area can be easily defined by performing the degeneration process on the large area where the individual areas overlap.
- the ratio of the physical quantity in the second plot area is the first dimension in the major axis direction which is the maximum dimension in the axial direction.
- the ratio may be a ratio with the second dimension in the minor axis direction, which is the minimum axial dimension.
- the fourth step of the nail area detection method when detecting physical quantities in a plurality of second plot areas of the second graph, only the length dimension in the major axis direction, which is the maximum dimension in at least one axis direction, is used. Is detected as the first dimension, and the maximum length dimension in the major axis direction is obtained as the first dimension, and the minor axis direction (generally orthogonal to the major axis), which is the minimum dimension in the axial direction as the second dimension. The maximum length dimension is obtained, and the second dimension / first dimension ratio is obtained.
- the change amount of the second dimension / first dimension ratio in the second plot area obtained for each threshold value is detected.
- the shape of the second plot area obtained for each threshold value is changed, and the length dimension in the minor axis direction is changed.
- the amount of change in the length dimension in the major axis direction is small.
- the direction on the coordinate extended in the length direction of the major axis may change, and the situation on the coordinate extended in the length direction of the major axis may not be detected accurately Can be suppressed. Further, it is possible to suppress the occurrence of a situation in which the shape changes due to the expansion / retraction process in the fourth step and the direction on the coordinates extending in the longitudinal direction of the major axis cannot be accurately detected.
- the ratio of the physical quantity in the second plot area is the first dimension in the major axis direction that is the maximum dimension in the axial direction.
- the ratio of the first dimension / (first dimension + second dimension) to the second dimension in the minor axis direction, which is the minimum length in the axial direction, may be used.
- the fourth step of the nail area detection method when detecting the maximum length dimension in the major axis direction in the plurality of second plot areas of the second graph, only the maximum length dimension in the major axis direction is simply detected. Instead, the maximum length dimension in the major axis direction is determined as the first dimension, the maximum length dimension in the minor axis direction is determined as the second dimension, and the ratio of the first dimension / (first dimension + second dimension) is calculated. In the sixth step, a change amount of the first dimension / (first dimension + second dimension) ratio of the second plot region obtained for each threshold is detected, and the gradient of the change amount is higher than that of the other regions.
- the shape of the second plot area obtained for each threshold value is changed, and the change in the length dimension in the minor axis direction is small, and the length in the major axis direction is small.
- Coordinates stretched in the length direction of the major axis when only the amount of change in dimensions is large Directions and may change, it is possible to suppress the occurrence of precisely can not detect a situation the direction of the coordinates is stretched in the length direction of the long axis direction. In this case as well, it is possible to suppress the occurrence of a situation in which the shape changes due to the expansion / retraction process in the fourth step and the direction on the coordinates extending in the longitudinal direction of the major axis cannot be accurately detected. .
- the predetermined color system is an HLS color system composed of hue (HUE), saturation (SATURATION), and luminance (LUMINANCE). May be.
- RGB color system is converted to HLS color system by the following formula:
- H Hue
- L Luminance
- S Saturation
- C Brightness
- H (hue) the physical quantity of the color system used for nail detection, it becomes easy to set or change the threshold value along one axis of H (hue). It can be easily confirmed by viewing the display, and the second plot area can be easily recognized and the nail area can be easily determined.
- the program according to the present invention performs each step in any one of the above-described nail region detection methods.
- the nail region detection according to the present invention is detected from captured image data captured by a color camera using any information processing device.
- the position information of the nail region can be obtained from the skin region of the finger image for any user.
- the storage medium according to the present invention stores a program for executing each step in any one of the above-described nail region detection methods.
- the program By storing the program according to the present invention in a storage medium, the program can be made portable, and the storage medium can be moved, and the multiple nail region detection methods of the present invention can be performed with any information processing apparatus at different locations. Can be executed.
- a nail region detection device includes at least a color camera that captures an image including a user's fingers in color and an information processing device that processes image data output from the color camera.
- the information processing apparatus includes a program storage unit in which a program for executing each step in any one of the above-described nail region detection methods is installed, and a configuration for making the program executable.
- a nail region detection device is a color camera that captures an image including a user's fingers in color, and an image that stores captured image data captured including the user's fingers by the color camera.
- a data storage unit, and the captured image data represented by three axes of three types of physical quantities different from the color system used in the color camera from the color system used in the color camera A colorimetric conversion plot unit for converting to a system and plotting it on a first graph in a three-dimensional color space, and one or more first plot regions in which data plotted after conversion to the predetermined color system is distributed Then, along the value of one of the three axes, a threshold value that is parallel to the other axis is set, and the threshold value is further changed in a direction crossing the first plot area.
- the first plot A second plot unit that re-plots only the plot data that is greater than or equal to the one-axis threshold value in a region to a second graph on a two-dimensional plane that is orthogonal to the one axis and the threshold value; A detection unit that detects at least one physical quantity or a ratio thereof in a plurality of second plot regions of the second graph; and a threshold value setting unit that sets a threshold value along the one axis.
- the second plot unit While changing in the crossing direction, the second plot unit re-plots only each plot data that is equal to or greater than the threshold value to the second graph, and the detection unit uses the physical quantity in a plurality of second plot regions of the second graph or The repeat control unit that repeats the process of detecting the ratio, and the physical quantity of the second plot area obtained by the repeat control unit for each threshold value or the amount of change in the ratio are detected. And, the slope of the variation has a second plot area of nail region and determining claw determination unit is equal to or less than a predetermined value.
- the nail area detection device data obtained by replotting data that is higher than the threshold value while changing the set threshold value from the first plot data obtained by converting the captured image data into a predetermined color system is obtained.
- the physical quantity or the ratio of the distributed second plot area is detected, and the second plot area in which the gradient of the change in the physical quantity or the ratio is smaller than the other areas is determined as the nail area.
- the gradient of the physical quantity of the plot area converted into the predetermined color system or the change amount of the ratio it is determined whether or not the plot area is the nail area. Can be recognized.
- the position information of the nail area can be obtained from the skin area of the finger image for any user, and the nail information can be effectively added to the silhouette shape information, or the position of each nail position can be added to the silhouette shape information.
- Information can be allocated efficiently, and the shape of a finger can be estimated more accurately.
- a nail region detection device provides a two-dimensional plane of a first plot region in which captured image data of a finger image captured by a color camera is plotted and converted on a first graph in a three-dimensional color space.
- the process of mapping to the second plot area is performed a plurality of times while changing the threshold value along the value of one axis of the three-dimensional color space.
- the second plot of the two-dimensional plane is performed.
- a control unit for detecting at least one physical quantity in the area or a ratio thereof, and a second plot area in which the gradient of the amount of change in which the physical quantity or the ratio of the second plot area changes in each process is a predetermined value or less. At least a nail determination unit.
- the control unit maps the first plot area of the three-dimensional color space onto the two-dimensional plane
- the threshold value is changed to obtain the physical quantity or the ratio of the second plot area
- the determination unit determines the second plot area as the nail area using the obtained physical quantity or the gradient of the change in the ratio
- the nail area can be reliably determined from the finger image, and the silhouette information of the hand Since the position of the nail can be easily assigned, the shape of the finger can be estimated more accurately.
- the nail area can be recognized from captured image data more reliably than before.
- the position information of the nail area can be obtained from the skin area of the finger image, the nail information can be effectively added to the silhouette shape information, and the information of each nail position can be efficiently assigned to the silhouette shape information, The shape of a finger can be estimated more accurately.
- the nail area detection device according to the first embodiment of the present invention shown in FIG. 1 is connected to a color camera 61 capable of capturing an image including a user's fingers in color and to the color camera 61 with a cable or the like.
- the information processing apparatus 70 is used.
- the color camera 61 is, for example, a high-speed camera (Dragon Express, manufactured by Point Gray).
- the information processing apparatus 70 only needs to have a configuration capable of performing the nail area detection method of the present invention on the input color image data, and more specifically, the program of the nail area detection method of the present invention can be installed. As long as it includes a program storage unit and a configuration for enabling execution of the program, it may be a personal computer or a game device.
- the information processing apparatus 70 includes an image data storage unit 71, a program storage unit 72, a color specification conversion plot unit 73, a threshold setting unit 74, a second plot unit 75, and a long axis detection unit. 76, a repeat control unit 77, a nail determination unit 78, a data synthesis unit 79, a shape determination unit 80, and a general silhouette shape estimation unit 91.
- the image data storage unit 71 and the program storage unit 72 may be integrated into one storage unit.
- Another configuration may be configured as a functional unit by causing a storage device such as a RAM and an arithmetic device to execute a program.
- the image data storage unit 71 stores captured image data captured by the color camera 61 including the user's fingers.
- the program storage unit 72 stores the nail area detection method program of the present invention in an installed state, but may store a program before installation. Further, the program before installation may be stored in a removable storage medium such as a memory card or a disk-shaped storage medium such as a CD-R.
- the color specification conversion plot unit 73 converts the captured image data from the RGB color system used in the color camera to the HLS color system, and plots the converted data on the first graph in the three-dimensional color space.
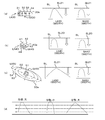
- the color space of the RGB color system is composed of a red R axis, a green G axis, and a blue B axis, and the captured image data of the original finger is at a predetermined position in the color space of the RGB color system. Is plotted in For example, when the nail 10 is located at the tip of the finger skin portion 1 of the middle finger shown in FIG. 2A, each plot data of the RGB image data as shown in FIG.
- the skin region 1a constituted by the distribution is located in a direction obliquely upward with respect to the RG plane.
- the skin region 1a exists at a twisted position in a three-dimensional RGB space.
- a nail region 10a constituted by the distribution of similar plot data is a position on the skin region 1a, and similarly exists at a twisted position in the RGB space.
- region 1a are disk shapes of an ellipse (flat circle) as shown in FIG.2 (b), and the shape close
- FIG. 2 (c) when the captured image data of FIG. 2 (b) is converted into the HLS color system and the converted data is plotted on the first graph in the three-dimensional color space of the HLS coordinate system, the result is as shown in FIG. 2 (c).
- the skin region 1b is perpendicular to the H axis and parallel to the L axis
- the nail region 10b is a position on the skin region 1b, and is also perpendicular to the H axis and parallel to the L axis. Accordingly, in order to set the boundary surface between both the nail region 10b and the skin region 1b, it is only necessary to set a surface parallel to the HS plane, and it is easy to provide the boundary surface.
- region 1b are flat elliptical disk shapes similarly to the case of FIG.2 (b). Since the skin region 1b has an elliptical disc shape, the major axis LA1 and the minor axis SA1 can be set. Similarly, the claw region 10b also has an elliptical disc shape, and thus the major axis LA10 and the minor axis SA10. Can be set.
- FIG. 3 (a) is a first embodiment in which the finger is extended only by the index finger and the middle finger, the remaining three are bent, and the nail 10 is located at the tip of the finger skin part 1 of the index finger and the middle finger.
- This is image data of the RGB color system, taken from the back side of the hand with a camera.
- FIG. 3B is a diagram in which the image data of FIG. 3A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- an area portion where a large number of small dots plotted in the color space of the HLS coordinate system are densely shown in a gray lump shape is the skin area 1b, and a relatively small number of large dots are slightly rough.
- the area portion shown in the gathered shape is the nail area 10b.
- the skin region 1b in FIG. 3B is generally within the range of a predetermined region in the vicinity of the LS plane located at one predetermined value on the H axis.
- the nail region 10b in FIG. 3B is generally within the range of the predetermined region near the LS plane located at another predetermined value of the H axis (a value smaller than the predetermined value of the skin region 1b). Yes. Accordingly, in the case of FIG. 3B as well, although the area shapes of the skin area 1b and the nail area 10b are different, it can be seen that the area can be divided at a boundary plane parallel to the HS plane, as in FIG. 2C.
- the individual areas of each plot data are close to each plot data of the plot area.
- the expansion process is performed until the individual areas of the other plot data sufficiently overlap, and then the degeneration process is repeated for the large area where the individual areas of the respective plot data overlap, so that the peripheral edge of each area is The amount of unevenness can be reduced, the peripheral edge of each region can be shaped like a smooth arc, and finally each region can be made closer to an elliptical disc shape.
- the long axis LA1 and the short axis SA1 can be set in the skin region 1b
- the long axis LA10 and the short axis SA10 can be set in the nail region 10b.
- FIG. 4 (a) shows a second embodiment, in which the fingers are extended only by the index finger, the middle finger, and the ring finger, the remaining two are bent, and the nail 10 is formed at the tip of the finger skin portion 1 of the index finger, the middle finger, and the ring finger.
- This is image data of the RGB color system, taken from the back side of the hand with a camera.
- FIG. 4B is a diagram in which the image data of FIG. 4A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- FIG. 4B also shows the skin region 1b and the nail region 10b plotted in the color space of the HLS coordinate system, as in FIG. 3B, and both regions are generally located at predetermined values on the H axis. It can be seen that each region falls within the range of a predetermined region in the vicinity of the LS plane and the region shape is different, but the region can be roughly divided by a boundary surface parallel to the HS plane. By repeating the expansion process and the contraction process on the plot data of the plot area, the areas of the skin area 1b and the nail area 10b can be finally brought close to an elliptical disk shape. This is similar to the case of 3 (b). Accordingly, the long axis LA1 and the short axis SA1 can be set in the skin region 1b, and the long axis LA10 and the short axis SA10 can be set in the nail region 10b.
- FIG. 5 (a) shows a third embodiment in which only the forefinger and thumb are stretched, the remaining three are bent, and the nail 10 is located at the tip of the finger skin 1 of the middle finger, ring finger, and little finger.
- This is image data of the RGB color system, taken from the palm side with a camera.
- FIG. 5B is a diagram in which the image data of FIG. 5A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- each area is generally within the range of a predetermined area in the vicinity of the LS plane located at a predetermined value of the H axis, the area can be roughly divided by a boundary plane parallel to the HS plane. It can be seen that a long axis LA1 and a short axis SA1 can be set in the skin region 1b, and a long axis LA10 and a short axis SA10 can be set in the nail region 10b.
- FIG. 6 (a) shows a fourth embodiment in which only the index finger, thumb, and little finger are stretched, the remaining two are bent, and the nail 10 is located at the tip of the finger skin portion 1 of the middle finger and ring finger.
- This is image data of the RGB color system, taken from the palm side with a camera.
- FIG. 6B is a diagram in which the image data of FIG. 6A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- the skin region 1b and the nail region 10b plotted in the color space of the HLS coordinate system are As shown in the figure, since both regions are each within the range of the predetermined region in the vicinity of the LS plane located at the predetermined value of the H-axis, the region can be divided by a boundary plane parallel to the HS plane. Finally, each region can be made close to an elliptical disk shape, and the major axis LA1 and minor axis SA1 can be set in the skin region 1b, and the major axis LA10 and minor axis SA10 can be set in the nail region 10b. Recognize.
- FIG. 7A shows a fifth embodiment, in which only the index finger and the middle finger are stretched, the remaining three are bent, and the nail 10 is located at the tip of the finger skin portion 1 of the thumb and little finger.
- tip part of the finger skin part 1 is the image data of RGB color system which image
- FIG. 7B is a diagram in which the image data of FIG. 7A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- each area is generally within the range of a predetermined area in the vicinity of the LS plane located at a predetermined value of the H axis, the area can be roughly divided by a boundary plane parallel to the HS plane. It can be seen that a long axis LA1 and a short axis SA1 can be set in the skin region 1b, and a long axis LA10 and a short axis SA10 can be set in the nail region 10b.
- FIG. 8 (a) shows a sixth embodiment in which only the thumb, ring finger, and little finger are stretched, the remaining index finger and middle finger are bent, and the tip of the finger skin 1 of the index finger and middle finger is bent.
- RGB color system image data obtained by photographing the nail 10 from the palm side with a camera.
- FIG. 8B is a diagram in which the image data of FIG. 8A is converted into the HLS color system and plotted in the color space of the HLS coordinate system.
- each area is generally within the range of a predetermined area in the vicinity of the LS plane located at a predetermined value of the H axis, the area can be roughly divided by a boundary plane parallel to the HS plane. It can be seen that a long axis LA1 and a short axis SA1 can be set in the skin region 1b, and a long axis LA10 and a short axis SA10 can be set in the nail region 10b.
- FIGS. 9A and 9B show image data distributed in the skin region 1b and the nail region 10b (10c) plotted in the color space of the three-dimensional HLS coordinate system, and the two-dimensional HS coordinate plane. And re-plotting (mapping) so that the distribution of the replot data is repeated, and the re-plot data is repeatedly subjected to dilation processing and degeneration processing so that each area in which each data is distributed is brought close to an elliptical disk shape, and the nail area 10b ( 10c) is provided with a major axis LA10 and a minor axis SA10.
- FIG. 9A shows two nail regions 10b and 10c.
- the distance between the skin region 1b and the nail region 10b varies depending on the finger pose, shooting direction / shooting angle, etc. In the case of the region 10b, the distance is away from the skin region 1b, and in the case of the nail region 10c, the distance is close to the skin region 1b.
- FIG. 9B shows that threshold values SL21 and SL20 parallel to the other axes can be set for the skin area 1b and the nail area 10b along the hue (HUE) axis values.
- HUE hue
- threshold values SL21 and SL20 indicate the axis values along the hue (HUE) axis in the two axes of HS coordinates (HS space), the skin area 1b that is the first plot area, and the nail.
- the maximum value or the minimum value of the region 10b is obtained by calculation processing, an initial value is set outside one side of the maximum value or the minimum value, and is changed in a direction crossing the skin region 1b and the nail region 10b.
- the nail region 10b has a smaller dimension width of the S-axis value than the surrounding skin region 1b, and the opposite skin region 1b cannot have the smaller dimension width of the S-axis value than the nail region 10b. Therefore, the maximum dimension of the S-axis value is obtained for a plurality of plot data distribution areas whose locations are unconfirmed. If the maximum dimension is equal to or less than a predetermined value (indicating the nail area 10b), the nail There is a high possibility that it is the region 10b, and when comparing the maximum dimension of the S-axis values of the two regions, the smaller one is more likely to be the nail region 10b.
- the maximum dimension is not limited to the case where the long axes LA10 and LA1 in the elliptical disk shape of the nail region 10b and the skin region 1b are conveniently parallel to the S axis.
- the major axis is tilted from the angle, the difference between the major axes LA10 and LA1 may disappear.
- the initial value of the threshold value SL20 is set outside the maximum value of the hue (HUE) axis value (the larger value), and the nail region 10b Change the direction to cross.
- the initial value of the threshold value SL20 may be set outside the minimum value (the side where the numerical value is smaller), and may be changed in a direction crossing the nail region 10b.
- only the second plot data of each plot data whose hue (HUE) axis value is greater than or equal to the threshold value SL20 (or less than the threshold value SL20 in the case of the minimum value start) is second. Re-plot on the graph.
- the major axis in the plurality of second plot regions of the second graph is detected, and the maximum length dimension in the major axis direction is measured.
- an initial value of the threshold value SL21 is set outside the maximum value of the hue (HUE) axis value, and is changed in a direction crossing the skin region 1b.
- the initial value of the threshold value SL21 may be set outside the minimum value (the side where the numerical value is smaller) and may be changed in a direction crossing the skin region 1b.
- the nail region 10b and the skin region 1b described above are described as a nail region and a skin region for each region for convenience of explanation, but which is a nail region from a plurality of plot data distribution regions. Assuming an unknown situation, it may be impossible to distinguish the nail region by simply comparing the dimensions along the major axis of both regions. More specifically, for example, when the major axis is not parallel to the S-axis and the data distribution is tilted from the S-axis and the major axis is also tilted, the difference between the two dimensions disappears or reverses in some cases. There are cases.
- the finger shown in FIG. 10A is the same image data as the finger shown in FIG. 2A, and is similar to the image data of the finger shown in FIG.
- the hue (HUE) of the nail 40, the finger pad 30 whose hue is similar to that of the nail 40, and the thumb hill 50 which is the base of the thumb whose hue is similar to that of the nail 40 are similarly shown.
- the threshold value was changed from the outside of the maximum value of the axis in the direction crossing the region, the state where the plot data area exceeding the variable threshold value on the HS coordinate increased was investigated. The results of this investigation are shown in FIGS. 10 (b) to 10 (d).
- FIG. 10B shows the plot data region of the finger pad 30 when the threshold value is changed in the direction crossing the region from the outside of the maximum value of the hue axis value.
- the second plot area 31 is a small area when the threshold is close to the initial value.
- the major axis in this case is the vertical direction on the paper surface of FIG. 10, and is an axis parallel to the final minor axis SA30.
- the second plot area 31 increases in the horizontal direction on the paper surface and becomes a horizontally long shape as the second plot area 32 becomes 33, 34.
- the long axis LA30 is the horizontal direction on the paper surface of FIG. 10
- the short axis SA30 is the vertical direction on the paper surface.
- the direction of the length dimension in the major axis direction of the second plot region 30a may change from vertical to horizontal depending on the threshold, and the first major axis (final minor axis SA30). ) Is small, but the first short axis (final long axis LA30) has a large amount of change. If only the length dimension in the long axis direction is used, the major axis can be misjudged from the threshold. There is sex.
- FIG. 10 (c) shows the plot data area of the nail portion 40 when the threshold value is changed in the direction crossing the area from the outside of the maximum value of the hue axis value.
- the second plot area 41 is a small area when the threshold is close to the initial value.
- the major axis in this case is the horizontal direction on the paper surface of FIG. 10 and is an axis parallel to the final major axis LA40.
- the second plot area 41 slightly increases in the vertical and horizontal directions on the paper surface and becomes substantially the same shape as the second plot area 42 becomes 43, 44.
- the long axis LA40 is the horizontal direction on the paper surface of FIG. 10
- the short axis SA40 is the vertical direction on the paper surface.
- FIG. 10D shows the plot data area of the thumb 50 at each threshold value when the threshold value is changed in the direction crossing the area from the outside of the maximum value of the hue axis value.
- the second plot area 51 is a small area when the threshold is close to the initial value.
- the major axis in this case is a direction inclined at an angle of about 20 degrees clockwise from the longitudinal direction on the paper surface of FIG. 10, and is an axis parallel to the final minor axis SA50.
- the second plot area 51 increases in the direction of the long axis LA50 on the paper surface and becomes a horizontally long shape in the direction of the long axis LA50 as the second plot area 52 becomes 53, 54.
- the long axis LA50 is an angle inclined about 20 degrees clockwise from the horizontal direction on the paper surface of FIG. 10
- the short axis SA50 is 20 degrees clockwise from the vertical direction on the paper surface. It is an angle tilted. From the above, in the case of the thumb hill 50, the long axis direction of the second plot region 50a may change from the short axis SA50 close to the vertical to the long axis LA50 close to the horizontal depending on the threshold.
- the amount of change is small for the axis (final short axis SA50), but the amount of change is large for the first short axis (final long axis LA50), and the threshold value is determined only by the length dimension in the long axis direction. There is a possibility of misjudging the long axis.
- FIG. 11A shows that the left end of the second plot region 30a (plot data region) of the finger pad 30 in FIG. 10B shows the threshold value SL21 from the outside of the maximum value of the hue axis value.
- the center diagram shows the case where the direction of the long axis LA30 in the second plot region 30a of the finger pad 30 is substantially the same as the threshold SL21, and the long axis LA30 when the threshold SL21 is changed in the transverse direction of the plot data region. It is a figure which shows the change of the width
- the rightmost figure shows the case where the minor axis SA30 in the second plot region 30a of the finger pad 30 is substantially the same as the threshold SL21, and the minor axis SA30 when the threshold SL21 is changed in the transverse direction of the plot data region. It is a figure which shows the change of the width
- FIG. 11B shows that the left end of the second plot region 40a (plot data region) of the claw portion 40 in FIG. 10C is the threshold SL20 from the outside of the maximum value of the hue axis value.
- the middle diagram shows the case where the major axis LA40 in the second plot area 40a of the claw portion 40 and the direction of the threshold SL20 are substantially the same, and the major axis LA40 when the threshold SL20 is changed in the transverse direction of the plot data area. It is a figure which shows the change of the width
- the rightmost figure shows the case where the minor axis SA40 in the second plot area 40a of the claw portion 40 has substantially the same direction as the threshold SL20, and the minor axis SA40 when the threshold SL20 is changed in the transverse direction of the plot data area. It is a figure which shows the change of the width
- the leftmost diagram shows that the threshold SL21 is outside the maximum value of the hue axis value for the second plot region 50a (plot data region) of the thumb 50 in FIG. 10D.
- the middle figure shows the case where the major axis LA50 in the second plot area 50a of the thumb hill 50 and the direction of the threshold SL21 are substantially the same, and the major axis when the threshold SL21 is changed in the transverse direction of the plot data area.
- the second plot area 40 a of the nail part 40 includes the second plot area 30 a of the finger pad 30 and the second plot area 50 a of the thumb hill 50.
- the rate of change (change gradient) of the long axis LA40 is smaller than the other long axes LA30 (finger abdomen 30) and the long axis LA50 (the thumb hill 50). Accordingly, in a situation where it is not clear which is the nail region from the plurality of plot data distribution regions, the nail region is determined by the rate of change (change gradient) of the length dimension in the major axis direction of each plot data distribution region. It can be seen that it can be distinguished.
- FIG. 11D is a diagram showing a state in which the central views of FIGS. 11A, 11B, and 11C are arranged horizontally and the threshold value is changed.
- the threshold value when the threshold value is lowered, the area increases so that the dimension in the major axis direction of each region is enlarged, and the degree of dispersion of the pixels is large.
- the amount of enlargement is relatively small, and the degree of pixel dispersion is also relatively small.
- FIG. 12A shows a seventh embodiment.
- the first threshold value is close to the maximum value of the image data in the hue (HUE) axis value with respect to the image data of the finger of FIG. 10A.
- FIG. 11 is a distribution diagram in which only plot data having a hue axis value equal to or higher than the first threshold SL20 is re-plotted in the second graph among the plot data when the value SL20 is set.
- FIG. 12B it is difficult to determine which position the re-plotted distribution map of FIG. 12A corresponds to the image data of the finger of the original FIG.
- FIG. 13 is a diagram in which the re-plotted data of FIG. 12A is superimposed on the image data of fingers of FIG. From FIG. 12A and FIG.
- the re-plot data of the nail portion 40 is Although the plot data area is formed with a size that is relatively large and is close to the actual size of the nail portion 40, the replot data of the finger pad 30 and the thumb hill 50 is hardly plotted. It is difficult to form the plot data region with a size close to the size or a size close to the actual size of the thumb 50, and the plot data region is formed with a size that is much smaller than the actual size.
- FIG. 13A is an eighth embodiment, and the first threshold value SL20 of FIG. 12A in the axis value of the hue (HUE) with respect to the image data of the finger of FIG. 10A.
- FIG. 6 is a distribution diagram in which only plot data having a hue axis value equal to or higher than the second threshold value SL20 is replotted in the second graph among the plot data when the lower second threshold value SL20 is set. is there.
- FIG. 13B it is difficult to determine which position the re-plotted distribution diagram of FIG. 13A corresponds to the image data of the finger of the original
- FIG. 14 is a diagram in which the re-plotted data of FIG. 13A is superimposed on the image data of fingers of FIG. From FIG.
- the plot data area is already formed with a size close to the actual size of the claw portion 40, so the plot data region has a slightly larger dimension than the claw portion 40. Can be seen to form.
- re-plot data of the finger pad 30 and the thumb hill 50 starts to be plotted, and a plot data region can be formed larger than in FIG.
- FIG. 14A is a ninth embodiment, and the second threshold value SL20 of FIG. 13A in the axis value of the hue (HUE) with respect to the image data of the finger of FIG. 10A.
- Distribution chart in which only plot data having a hue axis value equal to or higher than the third threshold SL20 is replotted in the second graph among the plot data when the third threshold SL20 is set lower than the third threshold SL20. It is.
- FIG. 14B it is difficult to determine which position the re-plotted distribution map of FIG. 14A corresponds to the original finger image data of FIG. 10A.
- FIG. 15 is a diagram in which the re-plotted data of FIG. 14A is superimposed on the image data of fingers of FIG. From FIG.
- the plot data area is already formed with a size close to the actual size of the claw portion 40, so the plot data region has a slightly larger dimension than the claw portion 40. Can be seen to form.
- the amount of replotted data of the finger pad 30 and the thumb hill 50 is increased, and a plot data area can be formed larger than that in FIG.
- a region is formed.
- FIG. 15A is a tenth embodiment, and the third threshold value SL20 of FIG. 14A in the axis value of the hue (HUE) with respect to the image data of the finger of FIG. 10A.
- Distribution graph in which only plot data having a hue axis value equal to or higher than the fourth threshold SL20 is replotted in the second graph among the plot data when the lower fourth threshold SL20 is set. It is.
- FIG. 15B it is difficult to determine which position the re-plotted distribution diagram of FIG. 15A corresponds to the image data of the finger of the original FIG.
- FIG. 16 is a diagram in which the re-plotted data of FIG. 15A is superimposed on the image data of fingers of FIG. From FIG. 15A and FIG.
- captured image data captured by the color camera 61 including the user's fingers is output to the image data storage unit 71 in the information processing apparatus 70.
- S1 In the information processing apparatus 70, a program is read from the program storage unit 72, and each unit for implementing the present invention is configured by the arithmetic unit and the storage unit.
- the picked-up image data from the RGB color system used in the color camera 61 is converted into three axes of three types of physical quantities (HLS) different from the color system used in the color camera. Is converted into a predetermined HLS color system expressed by (S2).
- the colorimetric conversion plot unit 73 plots the converted HLS data on the first graph in the three-dimensional color space of the HS coordinate system (S3).
- the color specification conversion plot unit 73 recognizes one or more first plot regions by repeating expansion processing and reduction processing for each data in a plurality of data distributions converted and plotted to the HLS color system. (S4). Thereafter, the threshold value setting unit 74 under the control of the repetition control unit 77 follows the value of the H axis, which is one of the three axes of the HLS color system, for each data in the first plot area. Thus, a threshold value parallel to the other S-axis is set (S5). Further, under the control of the repeat control unit 77, the second plot unit 75 re-plots only each plot data in the first plot area that is equal to or higher than the threshold value of the H axis in the second graph (S6).
- the long axis detection unit 76 recognizes a plurality of second plot regions from the re-plotted distribution of the second graph using expansion / reduction processing (S7), and each second The major axis in the plot area is detected, and the maximum length dimension in the major axis direction is measured (S8).
- the repeat control unit 77 uses the threshold value setting unit 74 to set the threshold value to the next value in the direction crossing the first plot area, for example, when starting from the highest level, the lower level side. For example, when starting from the lowest side, the next value is changed to the next higher value (S9), and it is determined whether or not the threshold value is the final value (S10).
- the repeat control unit 77 repeats the process from step S6 again, and when the threshold value is the final value (S10: YES), the long axis
- the detecting unit 76 detects the change amount (gradient) of the maximum length dimension in the major axis direction for each region (S11).
- the nail determination unit 78 compares the change amount (gradient) of the maximum length dimension in the major axis direction for each detected region (S12), and the change amount of the maximum length dimension in the major axis direction for each region. Is less than or equal to a predetermined value (S13).
- the nail determination unit 78 returns to step S12 and compares the change amount (gradient) of the maximum length dimension in the major axis direction for each area detected, and the change amount is If it is equal to or smaller than the predetermined value, the area is determined to be a nail area (S14), and the process ends.
- the image data stored in the image data storage unit 71 is also input to an approximate silhouette shape estimation unit 91 similar to the conventional one, and an approximate silhouette shape is estimated.
- the estimated approximate silhouette shape is combined with the nail region determined by the nail determining unit 78 by the data combining unit 79, and the finger shape and approximate silhouette shape are combined by the shape determining unit 80, so that the finger shape is more accurate than before. Shape determination is performed.
- the threshold setting unit 74 first sets the hue threshold to the upper limit (initial value) (S21), and resets the counter in the repeat control unit 77 to 0 (S22). .
- the second plot unit 75 extracts pixels equal to or greater than the threshold value from each plot data in the plot data area (S23), and the long axis detection unit 76 under the control of the repeat control unit 77.
- the expansion region and the degeneration processing are repeated for each plot data that is equal to or greater than the threshold value to define a region L (S24).
- the nail determination unit 78 assigns a label L to each defined area L (L is a natural number) by a labeling process (S25), calculates the aspect ratio of the extracted area L (S26), The ratio is stored (S27), the counter of the repeat control unit 77 is incremented by 1 (S28), the threshold value setting unit 74 lowers the threshold value by one step under the control of the repeat control unit 77 (S29), and repeat control is performed.
- the unit 77 determines whether the counter is 1 or less (S30).
- step S30 If the counter is 1 or less in step S30 (S30: YES), the second plot unit 75 under the control of the repeat control unit 77 returns to step S23 and exceeds the threshold from each plot data in the plot data area L. Are extracted (S23), and the subsequent processing is repeated. If the counter is greater than 1 in step S30 (S30: NO), the difference between the aspect ratio of the current counter value in the area L and the aspect ratio of the area L immediately before the current is obtained, and the aspect ratio is calculated. It is determined whether or not the difference is greater than a certain value (predetermined value) (S31).
- predetermined value predetermined value
- the nail determination unit 78 determines that the region L is not a nail region (S32), and labels the regions that are not nail regions.
- the number L is stored, and it is determined whether or not all the extracted areas L are nail areas (S35).
- the nail determination unit 78 determines whether the counter is equal to or greater than a certain value (predetermined value) (S34). If the value is greater than or equal to a certain value (predetermined value) (S34: NO), the process returns to step S23 to extract pixels above the threshold from each plot data in the plot data area L (S23), and the subsequent processing is repeated. To implement.
- the nail determination unit 78 calculates the number of nail regions and the respective centroids (S36).
- the nail determination unit 78 determines that all the extracted regions L are not nail regions (S35: YES), the number of nail regions and the respective centroids are calculated (S36), and all the extracted regions L are extracted.
- S35: NO the region L is a nail region
- S34 it is determined whether or not the counter is greater than a certain value (predetermined value) (S34), and the subsequent processing is performed.
- step S36 The process of calculating the number of nail regions and the center of gravity of each nail region in step S36 is performed in more detail as shown in FIG.
- the nail determination unit 78 acquires the label number “M” (M is a natural number) of the region M other than the region L determined not to be a nail region (S41), and the number N of regions M (0 ⁇ N ⁇ 5). Is output. Further, the nail determination unit 78 calculates the center of gravity p [M] (x, y) of the region M (S43), and outputs the center of gravity p [M] (S44).
- the nail area detection device data obtained by replotting data that is higher than the threshold value while changing the set threshold value from the first plot data obtained by converting the captured image data into a predetermined color system is obtained.
- the maximum length dimension in the major axis direction of the distributed second plot area is measured, and the second plot area in which the gradient of the change amount of the maximum length dimension in the major axis direction is smaller than the other areas is determined as the nail area.
- the gradient of the change amount of the maximum length dimension in the major axis direction of the plot area converted into the predetermined color system it is determined whether or not the plot area is a nail area.
- the nail area can be recognized from the data.
- the position information of the nail area can be obtained from the skin area of the finger image for any user, and the nail information can be effectively added to the silhouette shape information, or the position of each nail position can be added to the silhouette shape information.
- Information can be allocated efficiently, and the shape of a finger can be estimated more accurately. Therefore, according to the nail region detection method of the present embodiment, the nail region can be recognized from captured image data more reliably than in the past, so the position of the nail region from the skin region of the finger image can be determined for any user.
- Information can be obtained, nail information can be effectively added to silhouette shape information, information on each nail position can be efficiently allocated to silhouette shape information, and finger shape can be estimated more accurately it can.
- FIGS. 19A and 19B show a second embodiment of the present invention, in which finger image data is converted from the RGB color system to the YIQ color system, and the nail is defined among the three attributes of the YIQ color system.
- FIG. 6 is a diagram schematically showing a distribution shape in which two attributes that are difficult to overlap with skin are selected and image data in a three-dimensional color space is mapped to image data in a two-dimensional plane.
- the YIQ color system is a component signal used in the stage before obtaining the NTSC signal.
- the hue is rotated by 33 degrees with respect to the chroma components (Cb, Cr) of the currently used color difference component signal, and the I axis and the Q axis are orthogonal.
- Y axis lightness
- I axis warm color system: between orange and light blue
- Q axis cold color system: between bluish purple and yellow green.
- the two areas of the skin area 1b and the nail area 10d are distributed relatively apart. You can see the trend.
- the nail region 10d is distributed so as to rotate around a certain point. Therefore, it is difficult to take the threshold SL20, that is, the separation plane along one axis.
- the nail region and the skin region by converting the RGB color system used in the captured image of the color camera 61 into the HLS color system or the YIQ color system, the nail region and the skin region
- the color system used for separating the nail area and the skin area is the overlap between the nail area and the skin area when the image data of the 3D color space is mapped to the image data of the 2D plane. If there are few color systems, there is no need to limit to the HLS color system and the YIQ color system. Further, discriminant analysis may be used instead of obtaining the major and minor axes using principal component analysis.
- This method is used to obtain a criterion (discriminant function) for discriminating which group will be entered when new data is obtained when it is clear that the data given in advance is divided into different groups.
- This is the method.
- the shape data of areas such as nails, thumb hills, finger pads, etc.
- Appearing region shapes may be grouped according to past data. According to this method, even if the criteria for discrimination cannot be clearly determined, such as the change in the aspect ratio of the length dimension in the major axis direction and the length dimension in the minor axis direction, it is appropriate according to past data. Grouping can be performed.
- the nail region is changed by utilizing the change in the axial length of the detected nail candidate region as shown in FIGS. 11 (a) to 11 (d). Detected.
- the nail candidate regions detected in the first embodiment and the second embodiment described above are not obtained in an ideal oval shape or a shape close to a rectangle. Dimension detection may be difficult.
- the change in the axial length of the nail candidate area can be detected from the skin area on the back side of the hand. It is possible to detect the region.
- the difference in hue (hue) between the skin area on the back side of the hand and the nail area is relatively large.
- the skin area and nail area on the back side of the hand are relatively easy to detect, but the skin area and nail area on the palm (palm) side are not easy to detect. This is because, among the hues of the skin area on the palm (palm) side, the finger pad and the greaves have hues close to the nail candidate areas detected by the hue. This is because it is difficult to discriminate the nail region, the finger pad region, and the greaves region only with the hue when the finger pad and the bursa region are included.
- the nail candidate region can be detected by “repeating expansion processing and reduction processing on each plotted data”.
- the nail candidate region is not always obtained in an ideal oval or rectangular shape.
- the density of pixels having nail candidate hues differs for each nail candidate region. As shown in FIGS. 20A to 20E, this differs depending on the direction of the camera and the hand and the lighting condition. In general, the light reflected from the nail plate part is strong and the density of nail candidate pixels tends to be high, but even in the finger pad area and greaves area, the nail candidate depends on the camera and hand orientation and illumination. In some cases, the pixel density increases. Therefore, even if the hue and the density of nail candidate pixels are combined, it may be difficult to distinguish the nail region, the finger pad region, and the greaves region.
- Example 1 of the third embodiment >> Therefore, in Example 1 of the present embodiment, as a first stage, smoothing is performed on the original image Oi of the nail candidate area detected with a hue that is likely to be nail, and an image (dense image) Ci of the dense area is smoothed. Get. Smoothing in this case, for example, by performing smoothing so as to remove sesame salt-like noise (noise) with a median filter that outputs the median value in a predetermined area as the density of the pixel in the center of the area, Smoothing without blurring the edge.
- the dense image Ci can be obtained satisfactorily, the skin area and the nail area on the back side of the hand can be discriminated from the shape, area and density of the area of the dense image Ci.
- the region of the dense image Ci in the nail region is limited to the finger pad region only when conditions such that the direction of the camera and the hand and the lighting condition are optimal are good.
- the shape is closer to a rectangle or ellipse than the area of the dense image Ci in the limestone area, and the area is also within a predetermined range corresponding to the area of the nail, and the density tends to be high, so detection is possible. is there.
- the shape and area of the dense image Ci of the finger pad region and the greaves region also approximate the region of the dense image Ci of the nail region. It was also found that the degree of congestion and the like may be present and may not be detected.
- the original image Oi of the nail candidate region is obtained a plurality of times while changing the hue threshold value, and the region area or the number of pixels in the region of the dense image Ci is changed each time. Detect using quantity.
- the change amount of the area of the dense image Ci or the number of pixels in the area in the case of the nail is small. This is because there is a clear boundary between the nail and the surrounding skin as described above, and the hue difference and gloss difference are relatively large.
- the amount of change in the area of the dense image Ci or the number of pixels in the area in the case of the finger pad area and the greaves area is large.
- the finger pad area and the greaves area do not have a clear boundary with the surrounding skin, the hue and gloss gradually change, and the hue difference and gloss difference are relatively small.
- the amount of change in the area of the area or the number of pixels in the area increases. Therefore, the nail region can be detected even when the direction of the camera and the hand or the lighting condition is not optimal.
- Example 1 when the physical quantity or the ratio in the second plot area is an area, and the area is the area of the dense area image with respect to the second plot area, the area area of the dense image Ci of the nail area
- the nail region can be discriminated from the finger pad region and the grebe region by the small change amount and the large change amount of the region area of the dense image Ci of the finger pad region and the greave region.
- the number of area pixels of the dense image Ci in the nail area can be discriminated from the finger pad region and the greaves region by the small change amount of the finger pad region and the large change amount of the area pixel number of the dense image Ci of the finger pad region and the greave region.
- Example 2 of the third embodiment >> Further, in Example 2 of the present embodiment, the remainder (rough region image) excluding the dense image Ci in the original image Oi was used as the coarse image Si, and nail detection using the coarse image was also examined. In this case as well, the skin area and the nail area on the back side of the hand can be discriminated from the shape, area, density, etc. of the coarse image Si as long as the rough image Si is obtained satisfactorily.
- the area of the rough image Si in the nail area is limited to the nail area only when the surrounding boundary line in the case of the nail described above is optimal and the camera and hand direction and lighting conditions are optimal. Therefore, the shape is closer to a nail and closer to a rectangle or ellipse than the area of the rough image Si in the finger pad region and the greaves region, and the area is also within a narrow predetermined range around the nail. Therefore, detection is possible.
- the shape and area of the rough image Si in the finger pad region and the oil hill region are also approximated to the rough image Si region in the nail region It has been found that there is a case where it cannot be detected.
- the original image Oi of the nail candidate region is obtained a plurality of times while changing the hue threshold value, and the region area or the number of pixels in the region of the rough image Si is changed each time. Detect using quantity.
- the change amount of the area of the rough image Si or the number of pixels in the area in the case of the nail is small. This is because there is a clear boundary between the nail and the surrounding skin as described above.
- the amount of change in the area of the coarse image Si or the number of pixels in the area is large in the case of the finger pad area and the oil hill area.
- Example 2 when the physical quantity or the ratio thereof in the second plot area is an area, and the area is the area of the coarse area image with respect to the second plot area, the area area of the rough image Si in the nail area
- the nail region can be discriminated from the finger pad region and the greave region by the small change amount and the large change amount of the region area of the rough image Si of the finger pad region and the greave region.
- the number of area pixels of the rough image Si in the nail area can be discriminated from the finger pad region and the greave region by the small change amount of the finger pad region and the large change amount of the area pixel number of the rough image Si of the finger pad region and the greave region.
- Example 3 of the third embodiment nail detection using the ratio of the above-described area of the dense image Ci and the area of the coarse image Si was also examined.
- the ratio of the area of the coarse image Si to the area of the dense image Ci in the nail area is less than that of the finger pad area and the area of the finger pad as long as the area of the dense image Ci and the area of the coarse image Si are satisfactorily obtained. Since the ratio of the area of the coarse image Si to the area of the dense image Ci in the fat hill area is smaller, the skin area on the back side of the hand and the nail area can be distinguished.
- the region of the nail dense image Ci is relatively close to a rectangle or an ellipse, and the region area or the number of pixels in the region is also predetermined.
- the area of the nail image Ci and the coarse image of the nail dense image Ci also fall within a predetermined range for the coarse image Si obtained by removing the dense image Ci from the original image Oi. Since the ratio to the Si region is also within a predetermined range, the nail region can be detected.
- the ratio between the area of the dense image Ci and the area of the coarse image Si in the finger pad area and the greaves area is also the dense image in the nail area. It was found that the ratio between the Ci area and the coarse image Si area may be approximated, and the nail area may not be detected in some cases.
- the original image Oi of the nail candidate region is obtained a plurality of times while changing the hue threshold value, and the area of the dense image Ci or the number of pixels in the region and the coarse image Si Detection is performed using the amount of change for each time of the ratio with the area of the area or the number of pixels in the area.
- the amount of change in the area ratio between the dense image Ci and the coarse image Si in the nail region is small, and the amount of change in the ratio of the number of pixels in the area between the dense image Ci and the coarse image Si is also small.
- the amount of change in the ratio of the area area between the dense image Ci and the coarse image Si in the finger pad region and the oil bursa region is large, and the amount of change in the ratio of the number of pixels in the area between the dense image Ci and the coarse image Si is also large. Since it is large, it is possible to detect the nail region even when the direction of the camera and the hand and the lighting condition are not optimal.
- Example 3 when the physical quantity or the ratio in the second plot area is the ratio of the physical quantity and the ratio is the ratio of the area of the dense image and the coarse image in the second plot area, the dense image in the nail area. Since the change amount of each area of Ci and the coarse image Si is small and the difference in change pattern of each area does not affect, the change amount of the ratio of each area is also small. Since the change amount of each area of the dense image Ci and the coarse image Si is large and the difference in the change pattern of each area influences, the change amount of the ratio of each area also increases, thereby indicating the nail region. It can be discriminated from the abdominal region and the greaves region.
- Example 3 when the physical quantity or the ratio in the second plot area is the ratio of the physical quantity, and the ratio is the ratio of the number of pixels of the dense image and the coarse image in the second plot area, the density of the nail area is Since the change amount of each area pixel number of the image Ci and the coarse image Si is small and the difference in the change pattern of each area pixel number does not affect, the change amount of the ratio of each area pixel number is also small.
- the amount of change in the number of pixels in each area of the dense image Ci and the coarse image Si in the greaves region is large, and the difference in the change pattern of the number of pixels in each region is affected, so the amount of change in the ratio of the number of pixels in each region is also large.
- the nail region can be discriminated from the finger pad region and the greaves region.
- the nail region detection device according to the third embodiment of the present invention shown in FIG. 21 has a configuration in which a part of the nail region detection device according to the first embodiment is changed, and thus is the same as the first embodiment.
- the same reference numerals are given to the portions and the description thereof is omitted, and only the changed portions will be described.
- the color camera 61, the image data storage unit 71, the data synthesis unit 79, the shape determination unit 80, and the approximate silhouette shape estimation unit 91 are the same as those in the first embodiment, description thereof is omitted.
- a difference from the first embodiment a case will be described in which the nail region is discriminated from the finger pad region and the oil hill region by the amount of change in the ratio of the number of pixels in each region.
- the information processing apparatus 170 has a configuration capable of performing the nail region detection method of the present embodiment on the input color image data, and is roughly the same as that of the first embodiment.
- the part relating to the detection of the region is different, and the configuration is adapted to this embodiment.
- the program storage unit 171 of the present embodiment stores a program for implementing the present embodiment on the information processing apparatus 70 in the same manner as in the first embodiment.
- the stored program is the first embodiment. Unlike the above, the program conforms to the present embodiment.
- the color specification conversion plot unit 73 includes a preprocessing unit 172 and a nail candidate hue pixel region detection unit 173.
- the nail candidate hue pixel area detecting unit 173 converts the RGB color system captured image data used in the color camera into the HLS color system, and plots the converted data in the first graph of the three-dimensional color space.
- 2 (c), 3 (b) to 8 (b) show the first plot area in which the data converted into the HLS color system is plotted on the first graph in the three-dimensional color space of the HLS coordinate system. The state is shown.
- the pre-processing unit 172 performs a process of removing an external edge in an image in which fine noise is likely to ride and / or a process of reducing the influence of shadows.
- the processing for removing the external edge includes adding a group attribute to each pixel data in the hand area of the first plot area by a labeling process, and applying the outline to the pixel data group of the same group in the hand area. This is performed by deleting pixel data inward (depth direction) by two from the portion toward the center portion. In this case, the depth to be deleted can be larger than 2. However, in this embodiment, 2 is set as the minimum value for the process of removing the external edge.
- the reason for setting this minimum 2 is, for example, when the forearm (wrist) is rotated with respect to the camera and the nail is imaged obliquely, only a part of the nail area is imaged and the remaining area is captured. This is because the pixel data is reduced because the image is not picked up and the pixel data is deleted in order to further remove the external edge, because there is a risk that the detection accuracy of the nail is deteriorated.
- the process for reducing the influence of the shadow is, for example, a process of locally performing gamma correction on each pixel data in the hand area of the first plot area. If the standard for performing gamma correction on pixel data is determined by, for example, a red bit value represented by 8 bits, gamma correction of pixel data can be expressed by the following three equations.
- R ′, G ′, and B ′ are pixel values after correction of R, G, and B, respectively.
- the nail candidate hue pixel region detection unit 173 performs the RGB color system imaging as shown in FIG. 2B as described in the first embodiment with reference to FIGS. 1 and 2A to 2C.
- the image data is converted into the HLS color system as shown in FIG. 2C and plotted on the first graph in the three-dimensional color space to obtain a first plot area.
- a plane perpendicular to the H axis and parallel to the L axis As shown in FIGS. 3 (b), 4 (b), 6 (b), and 7 (b), a plane perpendicular to the H axis and parallel to the L axis,
- the nail region 10b and the skin region 1b can be separated. From this, it can be seen that the image data of the nail region 10b and the image data of the skin region 1b can be separated by the threshold value of the H axis.
- FIG. 22A shows the image data group of the nail region 10b and the image data group of the skin region 1b in the first plot region converted into the HLS color system, respectively.
- FIG. 22B shows an H-axis threshold th between the image data group of the nail region 10b and the image data group of the skin region 1b. It can be seen that the image data group of the nail region 10b and the image data group of the skin region 1b can be separated by inserting a plane (separation plane) perpendicular to the H axis and parallel to the L axis.
- a plane separation plane
- pixel distribution is such that part of the image data group of the nail region 10b and the image data group of the skin region 1b overlap each other.
- the image data (pixel) group of the skin region 1b is plotted in light gray
- the image data of the nail region 10b is plotted larger in black. (Pixel) group.
- image data (pixel) group of the skin area 1b and the image data (pixel) group of the nail area 10b overlap there are some image data (pixel) groups of the skin area similar in color to the nail.
- the image data (pixels) group of the thumb hill and finger pad the amount of the image data (pixels) group of the skin region whose hue is similar to that of the nail increases.
- the initial value is set outside one side of the maximum value or the minimum value of the nail region 10b or the skin region 1b on the H axis, and the skin region 1b and the nail region 10b are crossed along the H axis. To change. This process is performed by the threshold setting unit 174 under the control of the repeat control unit 178.
- the repeat control unit 178 sets the threshold value th to the next value in the direction of traversing the first plot area along the H axis, for example, the highest position side. If the threshold value th is the final value, it is changed to the next value on the lower side if it starts from the opposite side, and conversely, for example, if it starts from the lowest side, it is changed to the next value on the higher side.
- the threshold value setting unit 174, the second plotting unit 175, the dense region image detecting unit 176, and the coarse region image detecting unit 177 are controlled.
- the second plot unit 175 re-plots only each plot data that is equal to or greater than the threshold value th of the H axis in the first plot region to the second graph, and the replot is performed.
- Data of the second plot area that is equal to or greater than the threshold th is output to both the dense area image detection unit 176 and the coarse area image detection unit 177 in the subsequent stage. This process is repeated while changing the threshold th of the H axis.
- the data in the second plot area for each threshold value th on the H axis changes, for example, as shown in FIGS. 12 (a), 13 (a), 14 (a), and 15 (a).
- the dense region image detection unit 176 performs region combination by median smoothing on the data of the second plot region that is equal to or greater than the threshold th, for example, in the region of 11 ⁇ 11.
- the labeling processing is performed on the data. By this processing, it is possible to obtain the dense image region i of the nail candidate hue pixel having a hue like a nail and the center of gravity of each dense image region i.
- the coarse region image detection unit 177 uses the data of each dense image region i obtained by the dense region image detection unit 176 and the data of the second plot region as original image data.
- the data of the coarse image area is detected by obtaining an exclusive OR with the data of the dense image area i by the following equation.
- the obtained coarse image area data is output to the nail determination unit 179 in the subsequent stage together with the data of the dense image area i. This state is illustrated in FIG.
- Oi is an original image
- Ci is a dense image
- Si is a coarse image
- the nail determination unit 179 determines the threshold of the H axis from the data of the dense image region i and the data of the coarse image region that are input for each region of the original image data and for each threshold value of the H axis.
- the ratio of the number of pixels in the dense image and the number of pixels in the coarse image for each value is obtained by the following equation.
- the obtained ratio is a feature amount of each region at each threshold value.
- N i c is the number of pixels in the dense image
- N i s is the number of pixels in the coarse image
- par i th is the ratio of the area of the dense image and the coarse image in the region i at the threshold th.
- the threshold value setting unit 174 sets two or more threshold values th for the separation planes of the image data group of the nail region 10b and the image data group of the skin region 1b under the control of the loop control unit 178.
- the nail determination unit 179 calculates the area ratio par i th of each region i obtained by each threshold th.
- the nail region and the phalanx region or finger pad region have different hue gradients in each region i.
- the area ratio par i th of the region i does not change greatly for each threshold value, whereas the area ratio par i th of the region i changes greatly for each threshold value in the pinnacle region and the finger pad region.
- the case of using the amount of change in the ratio of the number of region pixels in the dense region and the coarse region has been described.
- the change in the number of region pixels in the coarse region can also be implemented by a similar method or a method in which a part is simplified / deleted.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Human Computer Interaction (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Abstract
Description
(a)手指は、多関節構造であるため形状変化が複雑である点。
(b)手指は、関節を曲げたり、握った場合に、シルエット形状としては手の甲や手のひらに手指が隠れてしまう自己遮蔽が多い点。
(c)手指は、身体全体に対する部位の占める比率は小さいが、可動空間が広い点。
玉城絵美, 星野 聖: "手首関節動作を含んだ手指形状の3次元推定," 信学技報WIT, 107, 179, pp.59-62, 2007。 佐野亮介, 冨田元將, 星野聖: "爪の相対的な位置情報をふるい分けに用いた3次元手指形状推定," 映像情報メディア学会技報, 33, 17, pp.21-24, 2009。
(1)本発明に係る爪領域検出方法は、カラーカメラで撮像された手指画像の撮像画像データが3次元色空間の第1グラフにプロットされて変換された第1プロット領域を、2次元平面の第2プロット領域に写像する処理を、前記3次元色空間の1軸の値に沿ってしきい値を変更しつつ複数回実施し、その各回の処理において、前記2次元平面の第2プロット領域おける少なくとも一つの物理量又はその比率を検出し、その第2プロット領域の物理量又はその比率が各回の処理で変化する変化量の勾配が所定値以下である第2プロット領域を爪領域と判定することを少なくとも含む。
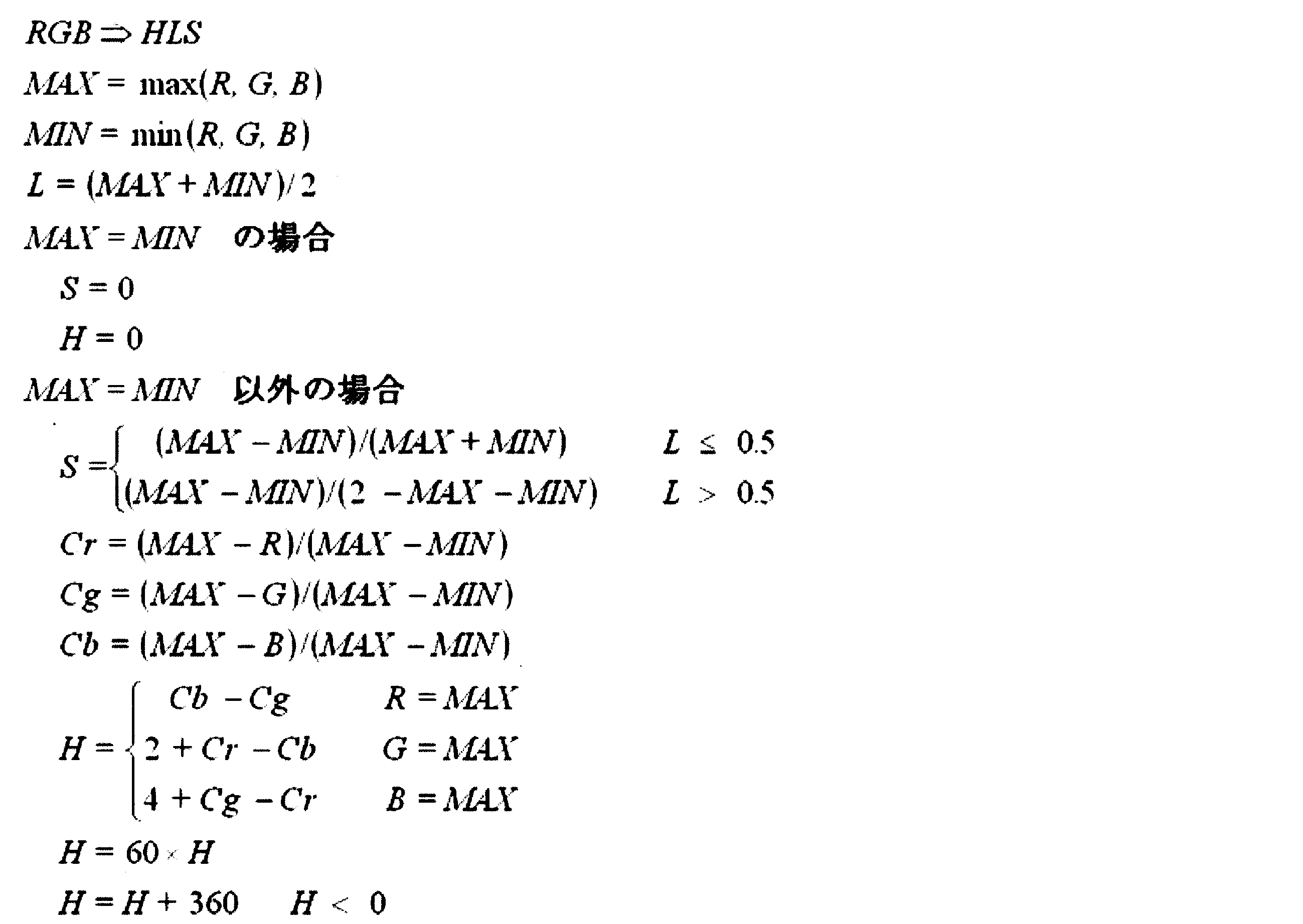
本発明の爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置によれば、従来よりも確実に撮像画像データから爪領域を認識することができるので、任意の使用者に対して手指画像の肌領域から爪領域の位置情報を得ることができ、シルエット形状の情報に爪情報を有効に追加したり、シルエット形状の情報に各々の爪位置の情報を効率的に割り当てでき、手指の形状をより正確に推定することができる。
<第1実施形態>
図1に示された本発明の第1実施形態に係る爪領域検出装置は、カラーで使用者の手指を含む画像を撮像可能なカラーカメラ61と、そのカラーカメラ61にケーブル等で接続された情報処理装置70から構成される。カラーカメラ61は、例えば、高速カメラ(Dragonfly Express, Point Grey社製)である。情報処理装置70は、入力するカラー画像データに対して、本発明の爪領域検出方法を実施できる構成を有していればよく、より詳しくは、本発明の爪領域検出方法のプログラムをインストールできるプログラム記憶部と、そのプログラムを実行可能にするための構成を含んでいれば、パーソナルコンピュータであってもゲーム装置であってもよい。
中央の図は、指腹部30の第2プロット領域30aにおける長軸LA30としきい値SL21の方向がほぼ同じ場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合の長軸LA30の幅の変化を示す図である。
右端の図は、指腹部30の第2プロット領域30aにおける短軸SA30としきい値SL21の方向がほぼ同じ場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合の短軸SA30の幅の変化を示す図である。
中央の図と右端の図を比較した場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合には、長軸LA30の幅の変化は大きいが、短軸SA30については幅の変化が小さい。
中央の図は、爪部40の第2プロット領域40aにおける長軸LA40としきい値SL20の方向がほぼ同じ場合で、しきい値SL20をプロットデータ領域の横断方向に変化させた場合の長軸LA40の幅の変化を示す図である。
右端の図は、爪部40の第2プロット領域40aにおける短軸SA40としきい値SL20の方向がほぼ同じ場合で、しきい値SL20をプロットデータ領域の横断方向に変化させた場合の短軸SA40の幅の変化を示す図である。
中央の図と右端の図を比較した場合で、しきい値SL20をプロットデータ領域の横断方向に変化させた場合には、長軸LA40と短軸SA40共に幅の変化が小さい。
中央の図は、母指丘50の第2プロット領域50aにおける長軸LA50としきい値SL21の方向がほぼ同じ場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合の長軸LA50の幅の変化を示す図である。
右端の図は、母指丘50の第2プロット領域50aにおける短軸SA50としきい値SL21の方向がほぼ同じ場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合の短軸SA50の幅の変化を示す図である。
中央の図と右端の図を比較した場合で、しきい値SL21をプロットデータ領域の横断方向に変化させた場合には、長軸LA50の幅の変化は大きいが、短軸SA50については幅の変化が小さい。
図12(b)は、図12(a)の再プロットした分布図が元の図10(a)の手指の画像データに対してどの位置に対応するかが判断しづらいので、元の図10(a)の手指の画像データ上に図12(a)の再プロットしたデータを重ねて合成した図である。
図12(a)、図12(b)からは、第1のしきい値SL20が色相(HUE)の軸値における画像データの最大値の近傍であっても、爪部40の再プロットデータは比較的多くプロットされて爪部40の実際の寸法に近い寸法でプロットデータ領域を形成するが、指腹部30や母指丘50の再プロットデータはほとんどプロットされないことから、指腹部30の実際の寸法に近い寸法や、母指丘50の実際の寸法に近い寸法でプロットデータ領域を形成することが困難であり、実際の寸法よりも非常に小さい寸法でプロットデータ領域が形成される。
図13(b)は、図13(a)の再プロットした分布図が元の図10(a)の手指の画像データに対してどの位置に対応するかが判断しづらいので、元の図10(a)の手指の画像データ上に図13(a)の再プロットしたデータを重ねて合成した図である。
図13(a)、図13(b)からは、第2のしきい値SL20が図12(a)の第1のしきい値SL20よりも低くなると、爪部40の再プロットデータはさらに多くプロットされるが、図12(a)の場合もすでに爪部40の実際の寸法に近い寸法でプロットデータ領域が形成されているので、それよりやや大きい程度の爪部40の寸法でプロットデータ領域を形成することがわかる。また、指腹部30や母指丘50の再プロットデータもプロットされ始め、図12(a)よりは大きくプロットデータ領域を形成できる。しかし、指腹部30の実際の寸法に近い寸法や、母指丘50の実際の寸法に近い寸法でプロットデータ領域を形成することは依然として困難であり、実際の寸法よりもかなり小さい寸法でプロットデータ領域が形成される
図14(b)は、図14(a)の再プロットした分布図が元の図10(a)の手指の画像データに対してどの位置に対応するかが判断しづらいので、元の図10(a)の手指の画像データ上に図14(a)の再プロットしたデータを重ねて合成した図である。
図14(a)、図14(b)からは、第3のしきい値SL20が図13(a)の第2のしきい値SL20よりも低くなると、爪部40の再プロットデータはさらに多くプロットされるが、図13(a)の場合もすでに爪部40の実際の寸法に近い寸法でプロットデータ領域が形成されているので、それよりやや大きい程度の爪部40の寸法でプロットデータ領域を形成することがわかる。また、指腹部30や母指丘50の再プロットデータのプロットされる量も増加し、図13(a)よりもさらに大きくプロットデータ領域を形成できる。しかし、指腹部30の実際の寸法に近い寸法や、母指丘50の実際の寸法に近い寸法でプロットデータ領域を形成することは依然として困難であり、実際の寸法よりもやや小さい寸法でプロットデータ領域が形成される。
図15(b)は、図15(a)の再プロットした分布図が元の図10(a)の手指の画像データに対してどの位置に対応するかが判断しづらいので、元の図10(a)の手指の画像データ上に図15(a)の再プロットしたデータを重ねて合成した図である。
図15(a)、図15(b)からは、第4のしきい値SL20が図14(a)の第3のしきい値SL20よりもさらに低くなると、爪部40の再プロットデータはさらにまた一層多くプロットされるが、図14(a)の場合もすでに爪部40の実際の寸法に近い寸法でプロットデータ領域が形成されているので、それよりやや大きい程度の爪部40の寸法でプロットデータ領域を形成することがわかる。また、指腹部30や母指丘50の再プロットデータのプロットされる量もさらに増加し、図13(a)よりもさらに大きくプロットデータ領域を形成できる。しかし、指腹部30の実際の寸法に近い寸法や、母指丘50の実際の寸法に近い寸法でプロットデータ領域を形成することは依然として困難であり、実際の寸法よりもやや小さい寸法でプロットデータ領域が形成される。
さらに爪判定部78は、領域Mの重心p[M](x,y)を計算し(S43)、重心p[M]を出力する(S44)。
図19(a)、(b)は、本発明の第2実施形態であり、手指の画像データをRGB表色系からYIQ表色系に変換し、YIQ表色系の3属性の中で爪と肌が重なりにくい2属性を選び、3次元の色空間の画像データを2次元平面の画像データに写像した分布形状を模式的に示した図である。
また、主成分分析を用いて長軸と短軸を求める代わりに、判別分析を用いても良い。同手法は、事前に与えられているデータが異なるグループに分かれることが明らかな場合、新しいデータが得られた際に、どちらのグループに入るのかを判別するための基準(判別関数)を得るための手法である。
あらかじめ多数の被験者の手指画像で爪・拇指丘・指腹などの領域の形状データを取得しておき、未知の手指画像入力があった場合、HLS表色系の色相軸閾値を変化させた時に現れる領域形状を、過去のデータにしたがってグループ分けすれば良い。この方法によれば、長軸方向の長さ寸法と短軸方向の長さ寸法の縦横比変化のように判別のための判断基準が明確に決められない場合でも、過去のデータに応じて妥当なグループ分けを行うことができる。
上記した第1実施形態と第2実施形態では、図11(a)~(d)に示されたような検出された爪候補領域の軸方向の長さ寸法の変化を利用して爪領域を検出している。しかし、後述するように、上記した第1実施形態と第2実施形態で検出された爪候補領域は、理想的な楕円形や長方形に近い形で得られるわけではないので、軸方向の長さ寸法の検出が困難である場合がある。
そこで、本実施形態の実施例1では、まず第1段階として、爪らしい色相で検出された爪候補領域の原画像Oiに対して、平滑化を実施して密領域の画像(密画像)Ciを得る。この場合の平滑化とは、例えば、所定領域内の中央値を領域中央の画素の濃度として出力するメディアンフィルターでゴマ塩状の雑音(ノイズ)を除去するように平滑化を実施する事により、エッジ部をぼけさせないで平滑化することである。この密画像Ciが良好に得られる条件化に限れば、密画像Ciの領域の形状、面積及び密集度等から手の甲側の肌領域と爪領域とを判別することができる。
さらに本実施形態の実施例2では、原画像Oi中の密画像Ciを除いた残り(粗領域の画像)を粗画像Siとして、その粗画像を用いた爪検出についても検討を行った。この場合も、粗画像Siが良好に得られる条件下に限れば、粗画像Siの形状、面積及び密集度等から手の甲側の肌領域と爪領域とを判別することができる。
さらに本実施形態の実施例3では、上記した密画像Ciの領域と粗画像Siの領域との比率を用いた爪検出についても検討を行った。この場合も、密画像Ciの領域と粗画像Siの領域とが良好に得られる条件下に限れば、爪領域の密画像Ciの領域に対する粗画像Siの領域の比率は、指腹領域と拇脂丘領域の密画像Ciの領域に対する粗画像Siの領域の比率よりも小さくなるから、手の甲側の肌領域と爪領域とを判別することができる。




1 手指画像、
1a (RGB表色系)肌領域、
1b (HLS表色系)肌領域、
1d (YIQ表色系)肌領域、
10 爪画像、
10a (RGB表色系)爪領域、
10b、10c (HLS表色系)爪領域、
10d (YIQ表色系)爪領域、
30 指腹部、
30a、31、32、33、34 (指腹部30の)第2プロット領域、
40 爪部、
40a、41、42、43、44 (爪部40の)第2プロット領域、
50 母指丘、
50a、51、52、53、54 (母指丘50の)第2プロット領域、
61 カラーカメラ、
70 情報処理装置、
71 画像データ記憶部、
72、171 プログラム記憶部、
73 表色変換プロット部、
74、174 しきい値設定部、
75、175 第2プロット部、
76 長軸検出部、
77、178 くり返し制御部、
78、179 爪判定部、
79 データ合成部、
80 形状判定部、
172 前処理部、
173 爪候補色相画素領域検出部、
176 密領域画像検出部、
177 粗領域画像検出部、
LA30 (指腹部30の)長軸、
LA40 (爪部40の)長軸、
LA50 (母指丘50の)長軸、
SA30 (指腹部30の)短軸、
SA40 (爪部40の)短軸、
SA50 (母指丘50の)短軸、
SL20 (爪部40の)しきい値、
SL21 (指腹部30又は母指丘50の)しきい値。
Claims (26)
- カラーカメラで撮像された手指画像の撮像画像データが3次元色空間の第1グラフにプロットされて変換された第1プロット領域を、2次元平面の第2プロット領域に写像する処理を、前記3次元色空間の1軸の値に沿ってしきい値を変更しつつ複数回実施し、
その各回の処理において、前記2次元平面の第2プロット領域おける少なくとも一つの物理量又はその比率を検出し、
その第2プロット領域の物理量又はその比率が各回の処理で変化する変化量の勾配が所定値以下である第2プロット領域を爪領域と判定する
ことを少なくとも含む爪領域検出方法。 - カラーカメラにより使用者の手指を含んで撮像された撮像画像データを、カラーカメラで使用された表色系から、当該カラーカメラで使用された表色系とは異なる3種類の物理量の3軸により表現される所定の表色系に変換して3次元色空間の第1グラフにプロットする第1ステップと、
前記所定の表色系に変換してプロットされたデータが分布する1個以上の第1プロット領域に対して、前記3軸の中の1軸の値に沿って、他の軸には平行なしきい値を設定する第2ステップと、
前記第1プロット領域における前記1軸のしきい値以上の各プロットデータのみを前記一軸に前記しきい値において直交する2次元平面の第2グラフに再プロットして第2プロット領域とする第3ステップと、
前記第2グラフの複数の第2プロット領域における少なくとも一つの物理量又はその比率を検出する第4ステップと、
前記第2ステップのしきい値を前記1軸に沿って前記第1プロット領域を横断する方向に変化させ、前記第3および第4ステップを繰り返す第5ステップと、
前記第5ステップでしきい値毎に得られる第2プロット領域の物理量又はその比率の変化量を検出し、変化量の勾配が所定値以下である第2プロット領域を爪領域と判定する第6ステップと
を有する爪領域検出方法。 - 前記第1ステップでは、前記撮像画像データに対して、第1グラフにプロットする前に少なくとも外部エッジの除去と影の影響除去を含む所定の前処理を行うステップと、爪らしい色相の爪候補色相画素領域を含む肌領域を第1プロット領域として検出するステップとを少なくとも含む
請求項2に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量又はその比率が少なくとも一つの軸方向の長さ寸法である
請求項2又は3に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、前記軸方向の長さ寸法が、最大寸法である長軸方向の長さ寸法である
請求項4に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量又はその比率が面積である
請求項2又は3に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における面積が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域の画像の面積である
請求項6に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における面積が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域を、前記第2プロット領域から排他的論理和で除去した粗領域の面積である
請求項6に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量の比率が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域の画像の面積と、前記第2プロット領域から前記密領域を除いた粗領域の面積と、の比率である
請求項請求項2又は3に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量又はその比率が画素数である
請求項2又は3に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における画素数が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域の画像の画素数である
請求項10に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における画素数が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域を、前記第2プロット領域から排他的論理和で除去した粗領域の画素数である
請求項10に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量の比率が、当該第2プロット領域に対して平滑化処理を実施後の画素が密である密領域の画像の画素数と、前記第2プロット領域から前記密領域を除いた粗領域の画素数と、の比率である
請求項請求項2又は3に記載の爪領域検出方法。 - 前記第1ステップでは、前記第1グラフが、前記3種類の物理量の前記3軸の中の2軸を用いた2次元平面のグラフである
請求項2~13の何れか一つに記載の爪領域検出方法。 - 前記第1ステップでは、前記所定の表色系が少なくとも色相を含む
請求項2~14の何れか一つに記載の爪領域検出方法。 - 前記第2ステップでは、前記しきい値が沿う1軸が色相である
請求項2~15の何れか一つに記載の爪領域検出方法。 - 前記第2ステップでは、前記しきい値の1軸は、前記第1プロット領域から、前記1軸における最大値と最小値の少なくとも一方を求め、前記最大値又は最小値の一方側よりも外側に前記しきい値の初期値を設定する
請求項2~16の何れか一つに記載の爪領域検出方法。 - 前記第4ステップでは、第2プロット領域に膨張処理と縮退処理を繰り返すことにより画定する
請求項2~17の何れか一つに記載の爪領域検出方法。 - 前記第4ステップ及びと第6ステップでは、第2プロット領域における物理量の比率が、最大の軸方向の長さ寸法である長軸方向の第1寸法と、最小の軸方向の長さ寸法である短軸方向の第2寸法との比率である
請求項2又は3に記載の爪領域検出方法。 - 前記第4ステップ及び第6ステップでは、第2プロット領域における物理量の比率が、最大の軸方向の長さ寸法である長軸方向の第1寸法と、最小の軸方向の長さ寸法である短軸方向の第2寸法との、第1寸法/(第1寸法+第2寸法)の比率である
請求項2又は3に記載の爪領域検出方法。 - 前記第1ステップでは、前記所定の表色系が色相(HUE)、彩度(SATURATION)、輝度(LUMINANCE)よりなるHLS表色系である
請求項2~19の何れか一つに記載の爪領域検出方法。 - 請求項1~20の何れか一つの爪領域検出方法における各ステップを実施するプログラム。
- 請求項21のプログラムを記憶する記憶媒体。
- カラーで使用者の手指を含む画像を撮像するカラーカメラと、
前記カラーカメラから出力される画像データを処理する情報処理装置とを
少なくとも含んで構成され、
前記情報処理装置は、
請求項21のプログラムがインストールされたプログラム記憶部と、
前記プログラムを実行可能にするための構成を含む
手指画像からの爪領域検出装置。 - カラーで使用者の手指を含む画像を撮像するカラーカメラと、
前記カラーカメラにより使用者の手指を含んで撮像された撮像画像データを記憶する画像データ記憶部と、
前記撮像画像データを、カラーカメラで使用された表色系から、当該カラーカメラで使用された表色系とは異なる3種類の物理量の3軸により表現される所定の表色系に変換して第1グラフにプロットする表色変換プロット部と、
前記所定の表色系に変換してプロットされたデータが分布する1個以上の第1プロット領域に対して、前記3軸の中の1軸の値に沿って、他の軸には平行なしきい値を設定し、さらにしきい値を前記第1プロット領域を横断する方向に変化させるしきい値設定部と、
前記第1プロット領域における前記1軸のしきい値以上の各プロットデータのみを前記一軸に前記しきい値において直交する2次元平面の第2グラフに再プロットして第2プロット領域とする第2プロット部と、
前記第2グラフの複数の第2プロット領域における少なくとも一つの物理量又はその比率を検出する検出部と、
前記しきい値設定部で、しきい値を前記1軸に沿って前記第1プロット領域を横断する方向に変化させながら、前記第2プロット部で前記しきい値以上の各プロットデータのみを第2グラフに再プロットし、前記検出部で第2グラフの複数の第2プロット領域における物理量又はその比率を検出する処理をくり返すくり返し制御部と、
前記くり返し制御部によりしきい値毎に得られる第2プロット領域の物理量又はその比率の変化量を検出し、変化量の勾配が所定値以下である第2プロット領域を爪領域と判定する爪判定部と
を有する手指画像からの爪領域検出装置。 - カラーカメラで撮像された手指画像の撮像画像データが3次元色空間の第1グラフにプロットされて変換された第1プロット領域を、2次元平面の第2プロット領域に写像する処理を、前記3次元色空間の1軸の値に沿ってしきい値を変更しつつ複数回実施し、
その各回の処理において、前記2次元平面の第2プロット領域おける少なくとも一つの物理量又はその比率を検出する制御部と、
その第2プロット領域の物理量又はその比率が各回の処理で変化する変化量の勾配が所定値以下である第2プロット領域を爪領域と判定する爪判定部と
を少なくとも含む手指画像からの爪領域検出装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/004,752 US9239962B2 (en) | 2011-03-14 | 2012-03-13 | Nail region detection method, program, storage medium, and nail region detection device |
| JP2013504736A JP5969460B2 (ja) | 2011-03-14 | 2012-03-13 | 爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011055889 | 2011-03-14 | ||
| JP2011-055889 | 2011-03-14 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012124686A1 true WO2012124686A1 (ja) | 2012-09-20 |
Family
ID=46830753
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/056403 Ceased WO2012124686A1 (ja) | 2011-03-14 | 2012-03-13 | 爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9239962B2 (ja) |
| JP (1) | JP5969460B2 (ja) |
| WO (1) | WO2012124686A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150269748A1 (en) * | 2014-03-24 | 2015-09-24 | Fujitsu Limited | Flesh color detection condition determining apparatus, and flesh color detection condition determining method |
| WO2020110347A1 (ja) | 2018-11-30 | 2020-06-04 | 船井電機株式会社 | 領域検出装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6241230B2 (ja) * | 2013-11-28 | 2017-12-06 | 富士通株式会社 | 生体情報判定装置及びプログラム |
| TW201541362A (zh) * | 2014-02-19 | 2015-11-01 | 奈爾史奈普股份有限公司 | 產生客製化手指甲藝術之系統與方法 |
| US20150356669A1 (en) * | 2014-06-06 | 2015-12-10 | Myncla Mobile Llc | Designing nail wraps with an electronic device |
| DE102015201613A1 (de) * | 2015-01-30 | 2016-08-04 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Betreiben einer Eingabevorrichtung, Eingabevorrichtung |
| GB2544971B (en) * | 2015-11-27 | 2017-12-27 | Holition Ltd | Locating and tracking fingernails in images |
| US10558844B2 (en) * | 2017-12-18 | 2020-02-11 | Datalogic Ip Tech S.R.L. | Lightweight 3D vision camera with intelligent segmentation engine for machine vision and auto identification |
| CN110076277B (zh) * | 2019-05-07 | 2020-02-07 | 清华大学 | 基于增强现实技术的配钉方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0951443A (ja) * | 1995-08-02 | 1997-02-18 | Fuji Xerox Co Ltd | 画像処理装置 |
| JP2009135704A (ja) * | 2007-11-29 | 2009-06-18 | Ricoh Co Ltd | 画像処理装置 |
| JP2010231352A (ja) * | 2009-03-26 | 2010-10-14 | Kddi Corp | 表示情報形成装置およびシステム |
-
2012
- 2012-03-13 JP JP2013504736A patent/JP5969460B2/ja not_active Expired - Fee Related
- 2012-03-13 WO PCT/JP2012/056403 patent/WO2012124686A1/ja not_active Ceased
- 2012-03-13 US US14/004,752 patent/US9239962B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0951443A (ja) * | 1995-08-02 | 1997-02-18 | Fuji Xerox Co Ltd | 画像処理装置 |
| JP2009135704A (ja) * | 2007-11-29 | 2009-06-18 | Ricoh Co Ltd | 画像処理装置 |
| JP2010231352A (ja) * | 2009-03-26 | 2010-10-14 | Kddi Corp | 表示情報形成装置およびシステム |
Non-Patent Citations (3)
| Title |
|---|
| EMI TAMAKI: "Virtual VR -VR Gijutsu no Oyo Ten'yo Shintenkai", TRANSACTIONS OF THE VIRTUAL REALITY SOCIETY OF JAPAN, vol. 12, no. 4, 10 January 2008 (2008-01-10) * |
| KIYOSHI HOSHINO: "Extraction of finger nail areas from hand images", IEICE TECHNICAL REPORT, vol. 110, no. 422, 14 February 2011 (2011-02-14) * |
| SHIGEYUKI KOMI: "Extraction of finger nails from skin area in hand image", ITE TECHNICAL REPORT, vol. 34, no. 41, 13 December 2010 (2010-12-13) * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150269748A1 (en) * | 2014-03-24 | 2015-09-24 | Fujitsu Limited | Flesh color detection condition determining apparatus, and flesh color detection condition determining method |
| WO2020110347A1 (ja) | 2018-11-30 | 2020-06-04 | 船井電機株式会社 | 領域検出装置 |
| US11270453B2 (en) | 2018-11-30 | 2022-03-08 | Funai Electric Co., Ltd. | Region detection device |
Also Published As
| Publication number | Publication date |
|---|---|
| US9239962B2 (en) | 2016-01-19 |
| JP5969460B2 (ja) | 2016-08-17 |
| US20140003665A1 (en) | 2014-01-02 |
| JPWO2012124686A1 (ja) | 2014-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5969460B2 (ja) | 爪領域検出方法、プログラム、記憶媒体、及び爪領域検出装置 | |
| CN112734747B (zh) | 一种目标检测方法、装置、电子设备和存储介质 | |
| CN109426789B (zh) | 手和图像检测方法和系统、手分割方法、存储介质和设备 | |
| CN107967482A (zh) | 图标识别方法及装置 | |
| JP5801237B2 (ja) | 部位推定装置、部位推定方法、および部位推定プログラム | |
| CN107818290B (zh) | 基于深度图的启发式手指检测方法 | |
| KR101579873B1 (ko) | 화상 처리 장치, 화상 처리 방법, 및 컴퓨터 판독 가능한 매체 | |
| CN102750538B (zh) | 一种基于图像处理技术的围棋比赛结果分析方法 | |
| Finlayson | Colour and illumination in computer vision | |
| JPH0877334A (ja) | 顔画像の特徴点自動抽出方法 | |
| KR20100038168A (ko) | 구도 해석 방법, 구도 해석 기능을 구비한 화상 장치, 구도 해석 프로그램 및 컴퓨터 판독 가능한 기록 매체 | |
| Casanova et al. | Texture analysis using fractal descriptors estimated by the mutual interference of color channels | |
| CN107369176B (zh) | 一种柔性ic基板氧化面积检测系统及方法 | |
| JP2014102619A (ja) | 画像処理装置、画像処理方法及びコンピュータプログラム | |
| JP2016014954A (ja) | 手指形状の検出方法、そのプログラム、そのプログラムの記憶媒体、及び、手指の形状を検出するシステム。 | |
| WO2019181072A1 (ja) | 画像処理方法、コンピュータプログラムおよび記録媒体 | |
| JP2011002882A (ja) | 撮像装置、画像処理プログラム、および撮像方法 | |
| CN108427932A (zh) | 指纹图像的识别方法及装置 | |
| JP3919722B2 (ja) | 肌形状計測方法及び肌形状計測装置 | |
| JP6086474B2 (ja) | 情報端末装置 | |
| JP5464661B2 (ja) | 情報端末装置 | |
| CN117656083B (zh) | 七自由度抓取姿态生成方法、装置、介质及设备 | |
| CN109934152B (zh) | 一种针对手语图像的改进小弯臂图像分割方法 | |
| JP4625949B2 (ja) | 物体追跡方法および物体追跡装置ならびにプログラム | |
| CN110705465B (zh) | 一种基于图像处理的手型分类方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12757579 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013504736 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14004752 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12757579 Country of ref document: EP Kind code of ref document: A1 |