TW201802492A - 用於監測地面變形的方法及系統 - Google Patents
用於監測地面變形的方法及系統 Download PDFInfo
- Publication number
- TW201802492A TW201802492A TW106113658A TW106113658A TW201802492A TW 201802492 A TW201802492 A TW 201802492A TW 106113658 A TW106113658 A TW 106113658A TW 106113658 A TW106113658 A TW 106113658A TW 201802492 A TW201802492 A TW 201802492A
- Authority
- TW
- Taiwan
- Prior art keywords
- receiver
- solution
- estimate
- relative orientation
- node
- Prior art date
Links
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
- G01S19/44—Carrier phase ambiguity resolution; Floating ambiguity; LAMBDA [Least-squares AMBiguity Decorrelation Adjustment] method
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/28—Satellite selection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/51—Relative positioning
-
- G—PHYSICS
- G08—SIGNALLING
- G08C—TRANSMISSION SYSTEMS FOR MEASURED VALUES, CONTROL OR SIMILAR SIGNALS
- G08C17/00—Arrangements for transmitting signals characterised by the use of a wireless electrical link
- G08C17/02—Arrangements for transmitting signals characterised by the use of a wireless electrical link using a radio link
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/34—Power consumption
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
本發明提供一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統,其包括:一代碼模組,其經組配以接收相關聯於該第一接收器之位置資料,接收相關聯於該第二接收器之位置資料,且判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;一浮動模組,其經組配以至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;一固定模組,其經組配以至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及一恆星模組,其經組配以至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
Description
發明領域
本發明係關於一種用於監測地面變形,特別是用於監測地滑移動型樣(landslide movement pattern)的方法及系統。
發明背景
儘管近來可用諸如基於雷射之測地技術、基於GPS之系統及基於地面/衛星之雷達的技術,但地滑移動型樣之監測仍然是一種挑戰。
使用中的大多數(若非全部)現有技術依賴於地滑區中稀疏部署之監測點之準確位置資訊的可用性,以及來自其他感測裝置之資料。使用中的各種類型之感測器(包括伸長計、固定式測斜計、傾斜計、壓力換能器及雨量計)全部往往會昂貴。此高成本往往會將其部署僅限制至風險非常高的位點。
先前系統之另外缺點為其需要持續的電源。實務上,並不總是能得到持續的電源,此意謂不能連續地得到GPS資料。此又潛在不利地影響典型的基於GPS
之定位系統的準確度。
本發明之至少較佳實施例的一目標係處理前述缺點中之一些。額外或替代目標係至少將有用的選擇提供給公眾。
發明概要
根據本發明之一態樣,一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法包含:接收相關聯於一第一接收器之第一位置資料;接收相關聯於一第二接收器之第二位置資料;判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
如本說明書中所使用之術語「包含(comprising)」意謂「至少部分地由……組成」。當解譯本說明書中包括術語「包含」之每一語句時,亦可存在除了前面有該術語之彼或彼等特徵以外的特徵。應以相同方式解譯諸如「包含(comprise)」及「包含(comprises)」之相關術語。
在一實施例中,判定該第一相對方位包含:
判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差。
在一實施例中,該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一衛星識別符、一接收器識別符、一時間、一平均化自主方位中之一或多者。
在一實施例中,判定該第二估計相對方位包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,判定該第三估計相對方位包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
根據本發明之一另外態樣,一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,該方法進一步包含界定至少一個模糊度估計。
在一實施例中,該方法進一步包含界定一共變數矩陣。
根據本發明之一另外態樣,一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法包
含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
在一實施例中,界定該解包含:獲得一第一解估計;捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
根據本發明之一另外態樣,一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統包含:一代碼模組,其經組配以接收相關聯於該第一接收器之位置資料,接收相關聯於該第二接收器之位置資料,且判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;一浮動模組,其經組配以至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;一固定模組,其經組配以至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及一恆星模組,其經組配以至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
在一實施例中,該代碼模組經組配以藉由判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差來判定該第一相對方位。
在一實施例中,該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一衛星識別符、一接收器
識別符、一時間、一平均化自主方位中之一或多者。
在一實施例中,該浮動模組經組配以:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,該固定模組經組配以:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
根據本發明之一另外態樣,一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統包含一浮動模組,該浮動模組經組配以:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,該浮動模組經進一步組配以界定至少一個模糊度估計。
在一實施例中,該浮動模組經進一步組配以界定一共變數矩陣。
根據本發明之一另外態樣,一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統包含一固定模組,該固定模組經組配以:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
在一實施例中,該固定模組經進一步組配
以:藉由獲得一第一解估計來界定該解;捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
根據本發明之一態樣,一種電腦可讀媒體在其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收相關聯於一第一接收器之第一位置資料;接收相關聯於一第二接收器之第二位置資料;判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
在一實施例中,判定該第一相對方位包含:判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差。
在一實施例中,該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一衛星識別符、一接收器識別符、一時間、一平均化自主方位中之一或多者。
在一實施例中,判定該第二估計相對方位包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相
關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,判定該第三估計相對方位包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
根據本發明之一另外態樣,一種電腦可讀媒體在其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
在一實施例中,該方法進一步包含界定至少一個模糊度估計。
在一實施例中,該方法進一步包含界定一共變數矩陣。
根據本發明之一另外態樣,一種電腦可讀媒體在其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
在一實施例中,界定該解包含:獲得一第一解估計;捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
在一個態樣中,本發明包含若干步驟。此等步驟中之一或多者相對於其他步驟中之每一者的關係、體現建構特徵之設備以及經調適以影響此等步驟之元件組合及部件配置全部在以下詳細揭示內容中被例示。
對於熟習本發明相關技術者而言,其自身將在不脫離如所附申請專利範圍中所界定的本發明之範疇的情況下想到許多建構改變以及本發明之廣泛不同的實施例及應用。本文中之揭示內容及描述純粹係說明性的,且並不意欲在任何意義上係限制性的。在本文中提及在本發明相關技術中具有已知等效者之特定整體的情況下,此等已知等效者被視為好像被個別地闡述而併入本文中。
另外,在依據馬庫西群組(Markush group)來描述本發明之特徵或態樣的情況下,熟習此項技術者將瞭解,亦藉此依據馬庫西群組之任何個別成員或成員子群組來描述本發明。
如本文中所使用,在名詞之前的「(等(s))」意謂該名詞之複數及/或單數形式。
如本文中所使用,術語「及/或」意謂「及」或「或」或此兩者。
希望對本文中所揭示之數字之範圍(例如,1至10)的參考亦併有對彼範圍內之全部有理數(例如,1、
1.1、2、3、3.9、4、5、6、6.5、7、8、9及10)以及彼範圍內之有理數之任何範圍(例如,2至8、1.5至5.5,及3.1至4.7)的參考,且因此,特此明確地揭示本文中明確地所揭示之全部範圍之全部子範圍。此等僅為特定地預期之事項的實例,且所列舉之最低值與最高值之間的數值的全部可能組合應被視為以類似方式明確地陳述於本申請案中。
在已參考專利說明書、其他外部文件或其他資訊源之本說明書中,此通常係出於提供用於論述本發明特徵之上下文的目的。除非另有特定陳述,否則對此等外部文件或此等資訊源之參考不應被認作承認此等文件或此等資訊源(以任何管轄權)為先前技術或形成此項技術中之共知常識之部分。
儘管本發明係大致地如上文所界定,但熟習此項技術者將瞭解,本發明並不限於此情形且本發明亦包括以下描述給出實例之實施例。
術語「電腦可讀媒體」應被視為包括單一媒體或多個媒體。多個媒體之實例包括集中式或分散式資料庫及/或關聯快取記憶體。此等多個媒體儲存一或多個電腦可執行指令集合。術語「電腦可讀媒體」亦應被視為包括能夠儲存、編碼或攜載供處理器執行且致使處理器進行上文所描述之方法中之任何一或多者之指令集合的任何媒體。電腦可讀媒體亦能夠儲存、編碼或攜載由此等指令集合使用或相關聯於此等指令集合之資料結構。術語「電腦可讀媒體」包括固態記憶體、光學媒體及磁性媒體。
如本說明書中關於處理器所使用之術語「組件」、「模組」、「系統」、「介面」及/或其類似者通常意欲指代電腦相關實體,其為硬體、硬體與軟體之組合、軟體,或執行中之軟體。舉例而言,組件可為但不限於在處理器上運行之處理程序、處理器、物件、可執行碼、執行緒、程式及/或電腦。作為說明,在控制器上運行之應用程式及控制器兩者皆可為組件。一或多個組件可駐留於處理程序及/或執行緒內,且一組件可局域化於一個電腦上及/或分佈於兩個或多於兩個電腦之間。
如本說明書中關於資料或信號傳送所使用之術語「連接至」包括全部直接或間接通訊類型,包括有線及無線、經由蜂巢式網路、經由資料匯流排,或任何其他電腦結構。設想到,其可為經連接整體之間的介入元件。應以類似方式解譯諸如「與……通訊」、「接合至」及「附接至」之變體。應以相同方式解譯諸如「連接」及「與……連接」之相關術語。
100‧‧‧基地台
102‧‧‧主電腦
104‧‧‧無線數據機
106‧‧‧網際網路數據機
108‧‧‧網際網路
110‧‧‧無線感測器網路(WSN)
112、208‧‧‧GPS接收器
114‧‧‧伺服器
116、116A、116B、116C‧‧‧節點
118‧‧‧中繼器
200‧‧‧電力管理區塊(PMB)
202‧‧‧太陽能面板
204‧‧‧微處理器單元(MPU)
206‧‧‧無線電
300‧‧‧升壓轉換器
302、304‧‧‧電壓監測器
400‧‧‧系統
402‧‧‧代碼模組
404‧‧‧浮動模組
406‧‧‧固定模組
408‧‧‧恆星模組
500、502‧‧‧接收器
504‧‧‧主區段
600‧‧‧建立及儲存模組
900、1000、1100、1200、1300‧‧‧方法
902、904、906、908、910、912、914、1002、1004、1006、1008、1102、1104、1106、1108、1110、1112、1114、1202、1204、1206、1208、1210、1212、1302、1304、1306、1308、1310‧‧‧步驟
現在將參考附圖而僅作為實例來描述用於監測地面變形之方法及系統之較佳形式,附圖中:圖1展示經調適以監測地面變形之硬體實施例。
圖2展示來自圖1之節點之實例。
圖3展示來自圖2之電力管理區塊之實例。
圖4展示用於地面變形監測之系統之實例的功能圖。
圖5展示多個裝置之間的方法之分佈實例。
圖6及圖7展示用於地面變形監測之方法之實施例的詳細視圖。
圖8展示經組配以最小化系統之組件之間的資料流程的實例系統。
圖9展示由圖4之節點之實施例實施的演算法之實例。
圖10展示由圖6之建立及儲存模組實施的演算法之實例。
圖11展示由圖4及/或圖6之浮動模組實施的演算法之實例。
圖12展示由圖4及/或圖7之固定模組實施的演算法之實例。
圖13展示由圖4及/或圖7之恆星模組實施的方法之實例。
較佳實施例之詳細說明
圖1展示經調適以監測地面變形之硬體實施例。基地台100及主電腦102。在一實施例中,基地台100包括無線數據機104,例如3G數據機,且主電腦102包括或連接至網際網路數據機106。無線數據機104及網際網路數據機106在網路或網路集合(例如網際網路108)上交換資料。
在一實施例中,基地台100經組配以除了自實體附接之GPS接收器112建立其自己的「節點演算法資料」以外亦自無線感測器網路(WSN)110收集經廣播之「節點演算法資料」。
接著處理此資料以移除任何時間模糊度且將此資料傳遞至伺服器114上,以便允許主電腦102存取此資料。
主電腦102經組配以連同廣播導航資料之下載一起採取此資料,且執行一或多個電腦可執行指令集合以計算方位解。
無線感測器網路110包含複數個節點,例如節點116A、節點116B及節點116C。在一實施例中,節點116經組配以搜集太陽能,控制其能量使用以便允許儘可能多的衛星觀測,實施下文所描述之節點演算法,且廣播位置資料及/或「節點演算法資料」。
在一實施例中,無線感測器網路110包括至少一個中繼器,例如中繼器118。中繼器118經組配以重播廣播資料,以便允許形成較大之無線感測器網路及/或具有不良視線特性之無線感測器網路。
在一實施例中,基地台100進一步包含WSN閘道器、基地台電腦、幹線電源中之一或多者。
圖2展示節點116之實例。在一實施例中,節點116包括電力管理區塊(PMB)200。電力管理區塊200經組配以儲存太陽能,例如由太陽能面板202產生之能量。電力管理區塊200及太陽能面板202共同地形成電力供應器。
在一實施例中,節點116包括微處理器單元(MPU)204、802.15.4無線電206及GPS接收器208。MPU 204、無線電206及GPS接收器208共同地形成主機。
在一實施例中,PMB 200將能量儲存於超級電容器(未圖示)中且在需要時將其遞送至主機。在一實施例中,PMB 200經組配以確保超級電容器不會過充電,藉由其被主機供應之資訊來管理電流需要,確保在將任何電力供應至主機之前存在足夠能量,且向主機通知在任一時間存在多少能量。
在一實施例中,主機區段控制節點116之操作且使能夠與外界通訊。
MPU 204連同電力管理區塊200一起部分地負責能量管理。在一實施例中,MPU 204經組配以關斷及接通無線電206及/或GPS接收器208以節約能量。
在一實施例中,GPS接收器208將來自衛星觀測之原始及經處理資料傳遞至微處理器204,以便能夠在節點自身上實施節點演算法。下文進一步描述節點演算法之實施例。
在一實施例中,節點包括天線,其包含被動螺旋天線、主動平片天線中之一或多者。
在一實施例中,節點116具有以下特性中之多者中之一者:低成本、不包括電池、被太陽能供電、足夠緊湊以固持於一隻手中、能夠甚至在陰天仍操作。
在一實施例中,無線電206包含802.15.4無線電,其相比於諸如Wifi之其他標準相對遠程,同時較便宜、功率較低且較簡單。
在一實施例中,MPU 204包含來自微晶片之
奈米功率物品,其具有低功率消耗及低成本。
在一實施例中,GPS接收器208包含單頻帶Ublox LEA6T模組。與節點116之其他組件相比較,接收器208往往會為相對昂貴的組件。與節點116中之其他組件相比較,接收器208亦使用最多的功率(大約100mW)。此種能量消耗係含有GPS接收器之小裝置的典型。
在一實施例中,GPS接收器208經組配以處於某種關斷狀態或極低功率狀態,同時仍保持星曆資料或至少能夠在再次切換回時被導入有來自MPU 204之星曆資料。
在一實施例中,節點116圍封於殼體(未圖示)內。太陽能面板202包含儘可能地覆蓋殼體頂部之實質上全部表面區域之一或多個多晶太陽能面板。多晶及/或單晶太陽能面板已被發現為歸因於通常日光條件下之成本及效率而係合適的。
在一實施例中,PMB 200經組配以將太陽能面板202及主機區段鏈結在一起。
圖3展示電力管理區塊200之實例的方塊圖。在一實施例中,PMB 200經組配以在低功率需求之時間內最小化靜態功率,以便能夠甚至在低光位準之時間仍將電荷儲存於超級電容器上。
在一實施例中,PMB 200不具有最大功率點追蹤(Maximum Power Point Tracking;MPPT)。來自太陽能面板202之能量僅僅經由箝位電路系統而饋送至超級電
容器中,以避免電容器上之電壓變得過高。
在最初將電力施加至超級電容器後,PMB 200就處於「關斷」狀態。PMB 200包括最初被設定為關斷之升壓轉換器300。
電壓監測器302連接至太陽能。在一實施例中,電壓監測器302被設定為2.3V,以除了啟用升壓轉換器300以外亦避免超級電容器上之過電壓。
在一實施例中,電壓監測器304被設定為1.7V,其在被觸發時啟用升壓轉換器300。一旦電壓監測器304被觸發,其就啟用升壓轉換器300。接著開始本地儲集器之填充。本地儲集器之此填充致使電壓監測器304斷接。電容器電壓線將連接至超級電容器以便允許主機監測超級電容器電壓,且vdd將為3.3V。
當主機最初開機時,其將歸因於電壓監測器304,電壓監測器304歸因於vdd變高而不久斷接,因此關斷升壓轉換器300。此意謂主機在其不使用超級電容器儲集器且改為僅僅使用比較起來為微小且將不完全地充滿的本地儲集器時必須採取立即動作。
主機必須進入極低功率狀態,其偶爾地喚醒以使升壓轉換器能夠補充本地儲集器;或者,主機必須使升壓轉換器能夠使本地儲集器保持充滿。無論如何,主機皆經組配以負責預防其vdd電力線崩潰。
在主機睡眠且升壓轉換器300被停用時之正常操作時間期間,靜態功率極低。此允許太陽能面板202
將電荷儲放於超級電容器上。當主機希望接通無線電206或GPS接收器208時,其必須使升壓啟用線保持作用中。
在一實施例中,主機經組配以維持介於大約1.4V與2.2V之間的超級電容器電壓。
在一實施例中,電力管理區塊200進一步包含充電限制器。
節點116之靜態功率包含在2V之標稱電壓下由節點116使用以在該節點設法使用儘可能少的能量時僅預防電力線失效的平均功率。此意謂主機週期性地再填充本地儲集器,而無其他操作。主機需要保持於睡眠狀態,其偶爾地喚醒其自身以再填充本地儲集器,而主機可控制之全部周邊裝置保持關斷。
假定電容器自放電與電容器大小成比例,則在一實施例中關於超級電容器之靜態功率被計算為:P Q =1..739C S +73
其中C S 為以法拉為單位之超級電容器大小,且P Q 為以微瓦為單位之靜態功率。
在一實施例中,當使用33F電容器時,大約一半的靜態功率促成超級電容器自放電,而對於10F電容器,大約20%的靜態功率促成超級電容器自放電。在一實施例中,歸因於90μW或130μW之不同電容器的輕微效應小得可接受,使得可使用任一電容器。
在一實施例中,相關聯於節點116之周邊裝置包含無線電206及GPS接收器208。因為當使用周邊裝置
時升壓調節器必須接通,所以供應至周邊裝置之電壓予以3.3V調節。
因為能量消耗為功率乘時間,所以無線電206潛在地使用量與GPS接收器208使用之能量相比較不顯著的能量。通常,節點116不會進入RX模式,且使用近零功率而全體完全地斷接。節點116接通其無線電206以傳輸曆元封包之時間段係在2ms或3ms內。此時間之大部分並不處於TX模式,而是處於某一其他模式,而無線電之振盪器穩定。
對於較差狀況,一秒一次被發送的使用495mW之封包的3ms之情境平均起來等於1.5mW。同時,GPS接收器208需要連續地接通以供應無線電曆元封包且使用大約123mW之功率;比接收器所需要之功率大兩個數量級。
因此,大致上,當GPS接收器208在作用中時,僅該接收器使用能量。無線電206之能量消耗因此可被視為可忽略的。
當GPS接收器208在非作用中時,無線電206斷接,且GPS接收器208處於使用70μW之後備功率模式。
節點116經組配以獲得觀測且將其發送回至基地台。作用中節點功率使用被定義為在採取觀測且每隔一秒發送觀測之時間期間在2V之標稱電壓下由節點116使用的近似平均功率。此為由節點之全部裝置使用的能量,該等裝置包括PMB 200中之升壓轉換器、電容器洩漏、MPU
204、無線電206、GPS接收器208、GPS低雜訊放大器(LNA)及其他裝置。
在一實施例中,節點116經組配以最大化GPS接收器208處於採取觀測且將其傳回至基地台100之操作性「接通」模式的時間。
在一實施例中,太陽能面板202相當地有效於在低光位準下向節點116供電。當光位準低時具有接近於2V之MPP電壓的太陽能面板係合適的。
太陽能面板典型電壓通常係針對直接日光條件及1000Wm-2[9]之輻照度而給出。當輻照度減小時,太陽能面板之MPP電壓減小,因此,具有大於2V之額定典型電壓的太陽能面板係合適的。雖然可在夏季獲得1000Wm-2,但甚至在冬季的晴天,取決於位置,輻照度仍可大於1000Wm-2之一半。甚至在理論最大光位準可大的年份時,每日光位準仍可顯著地變更。
太陽能面板可在二極體上模型化為恆定電流源。以下方程式展示使用僅僅一個二極體來模型化自太陽能面板獲得之電流的遍存方式,且由光電流與暗電流之疊加組成。

大致上,假定太陽能面板之串聯電阻小,則短路電流大致等於光電流。光電流又與輻照度成比例。因此,短路電流I SC 與輻照度I r 大致成比例。此准許一旦判定
比例常數就量測輻照度之方式。
如所給出之太陽能面板模型化方程式為可使用朗伯W函數而變得明確之隱含函數,但通常其僅僅保持於其隱含形式。
暗電流I Dark 為當無光施加至太陽能面板202時歸因於所施加之外部電壓而流動通過該太陽能面板的電流。

在一實施例中,將諸如遍存1N4148之阻塞二極體添加至太陽能面板202以將此電流縮減至近零。此阻塞二極體將MPP電壓縮減大約0.6V,此使2V之標稱電壓較接近於MPP電壓之標稱電壓。
然而,因為甚至在極低光位準下2V仍顯著地低於MPP電壓,所以在一實施例中根本不存在阻塞二極體。
對於要求節點116在夜晚連續地起作用之應用及使用極少能量之主機,需要使用阻塞二極體,此係因為此將顯著地縮減在夜晚由節點116及太陽能面板202使用之靜態功率。
對於不要求節點在夜晚起作用之應用或主機使用大量能量之應用,不需要使用阻塞二極體,此係因為此將增加自太陽能面板202遞送至節點116之功率,而由太陽能面板202之暗電流造成的200μW與由節點116使用之能量之功率相比較將不顯著。
在一實施例中,GPS接收器208使用相對大量能量,因此不需要使用阻塞二極體。
超級電容器大小設定取決於應用。若節點116用以在夜晚起作用,則需要使超級電容器儘可能地大,以在不存在陽光時促進在夜晚之儘可能多的觀測。
然而,若節點116用以僅在白天時間期間起作用且超級電容器之作用僅僅係在白天時間期間允許工作循環,則大小較不關鍵,此係因為較小的大小係可能的。
高達5000F之超級電容器係可便宜得到的且足夠大。使用240mW之GPS接收器潛在地在約八小時或比如大致為夜晚長度內將電容器電壓自2.2V下降至1.4V,且因此大致為連續夜晚操作所需要之最小電容器大小。
若需要連續夜晚及連續白天操作,則在白天時間期間每天將需要平均起來大約500mW。因為甚至5000F超級電容器仍不能夠儲存足夠電荷以用於多於一個夜晚之連續操作,所以甚至在白天時間期間之平均每天功率不大於500mW的一天仍將需要工作循環。
若將甚至在光位準低至20Wm-2之白天仍獲得此500mW,則此將需要大約半公尺乘半公尺之單晶/多晶太陽能面板。此大得不可接受。因此,需要工作循環演算法。
此等工作循環演算法經組配以謹慎地決定誰自太陽能面板202取得有限能量及應如何使用已儲存於超級電容器上之能量,使得超級電容器上之電壓不會下降
至低於1.4V,或使得觀測在整個24小時日週期內儘可能均勻地分佈。
在一實施例中,超級電容器提供允許在白天時間期間之工作循環而非在夜晚獲得觀測的方法,因此使超級電容器大小較不關鍵。
GPS接收器往往會在其於有用的觀測被獲得之前接通之後經受初始化時間(initialization time)或初次固定時間(Time To First Fix;TTFF)。GPS接收器208經組配以獲取及追蹤衛星,且接著解析代碼可觀測量模糊度。此獲取時間取決於許多因數(諸如星曆是否已被保持、GPS接收器具有何種定時資訊、其已關斷多久等等)而介於1秒與26秒之間。
假定介於1秒與26秒之間的此值排除在代碼可觀測量模糊度已被解析之前所需要的時間,此係因為此可多達6秒,如代碼可觀測量子章節A.4.1中所展示。
此初始化能量為未有用地獲得觀測所耗費的能量。因此,具有長週期之工作循環可有助於減輕花費在每隔一個工作循環週期連續地初始化GPS接收器的總能量。可使用較大超級電容器來增加工作循環週期。接通時間之近似浪費百分比可被計算如下:

其中t init 為TTFF,P GPS 為GPS接收器之功率,D為工作循環,C為電容,且v i 及v f 分別為超級電容器上之初始電壓
及最終電壓。
使用較大電容器會潛在地縮減浪費時間,且當使用低工作循環時,浪費變得較大。使用較大電容器會造成觀測變得較笨重以及超級電容器自放電之一般趨勢較大,此兩者皆不為吾人所想要的。然而,與GPS功率消耗相比較,靜態功率往往會對於10F電容器量測及33F電容器量測兩者皆不顯著。兩個靜態功率往往會相當地類似。
用於自主GPS接收器之TTFF可為稍微不可預測的。不保證GPS接收器208將一直獲取衛星。在一實施例中,使Ublox LEA6T之後備模式連續地保持作用中通常會致使TTFF變得較一致且較短,同時使用最小功率。10秒之值係典型的。
因為「接通」時間之浪費百分比亦與TTFF成比例,所以需要實施一致的極短TTFF。10秒TTFF往往會產生「接通」時間之較小浪費百分比,藉此縮減使用較大電容器之益處。
在一實施例中,此初始化方法在獲得有用的觀測之前引起5秒之典型時間。5秒TTFF產生「接通」之較小浪費百分比,藉此縮減使用較大電容器之益處。然而,星曆及時間導入會增加系統之複雜度。
在一實施例中,使用33F電容器。此在測試類型系統時允許合理量之靈活性。其藉由改為永久地供應GPS後備功率甚至在不使用星曆及時間導入的情況下歸因於初始化而仍允許「接通」時間之相當小的浪費百分比;
通常小於5%,此與針對10F電容器之小於20%形成對比。
圖4展示用於地面變形監測之系統400之實例的功能圖。系統400特別適於處理由節點116獲得之位置資料。
在一實施例中,系統400包括代碼模組402、浮動模組404、固定模組406及恆星模組408。該等模組中之每一者經設計以產生比上一方位解更準確的方位解。在一實施例中,浮動模組404、固定模組406及恆星模組408需要先前模組方位解作為其輸入。
在一實施例中,四個模組中之每一者產生解。舉例而言,代碼模組402輸出代碼解,浮動模組404輸出浮動解,固定模組406輸出固定解,且恆星模組408輸出恆星解。
在一實施例中,浮動模組404採取來自節點116或來自另一模組之位置資料而非來自代碼模組402之代碼解作為輸入。在一實施例中,輸出來自固定模組406之固定解作為來自系統400之最終解,藉此繞過恆星模組408。
在一實施例中,代碼模組402經組配以減去粗略自主方位解以產生最終解之初始估計。
在涉及浮動模組404之實施例中,向每一唯一對衛星給出一實數N。最小平方(LS)求解全部N、方位解,及此兩者之共變數資訊。為此,使用近似方位估計來解開雙差。若代碼解估計相當地準確(小於(比如)20m),則包裝雙差可被解開。即使當GPS接收器被分離小於幾公
里時,包裝雙差在使用近似方位估計予以校正時亦不會改變得太快。
在一實施例中,浮動模組404經組配以反覆地操作。
在一實施例中,固定模組406經組配以採取實值N及其共變數,且使用拉目達(LAMBDA)演算法來進行整數最小平方(ILS)以將N固定至整數。在使用LS的情況下,使用固定N以產生固定解。接著將雙差捨位至最近解平面,且獲得另一解。在針對特定整數模糊度N給出一個雙差的情況下,解平面為方位解。
在一實施例中,恆星模組408經組配以進行恆星濾波以改良每天解精確度。除了固定解堆疊以外亦使用關於有偏位置之絕對包裝殘餘堆疊。在可能時,兩者之算術平均化至少部分地歸因於供獲得觀測之隨機性質而引起每天解精確度改良。
歸因於獲得觀測之隨機性質,恆星濾波潛在地改良每天解之精確度。在一實施例中,改良係至少部分地歸因於觀測之隨機及間歇性質,以及不能夠連續地獲得高速率觀測。
系統400不需要代碼虛擬距離,及將在無線電鏈路上發送的相位可觀測量之整數分量。此會潛在地藉由在無線電鏈路上發送此等事項之前移除此等項目來提供頻寬之大量縮減。此產生較小封包,其又引起較低曆元損失,因此減輕有損通道之效應。
仍需要導航資料,且導航資料無需具有高準確度。廣播導航係合適的,且可直接自衛星獲得或自網際網路下載廣播導航。
在一實施例中,系統400經組配以進行被稱作代碼浮動固定恆星(Code Float Fix Sidereal;CFFS)演算法之分散式演算法。CFFS演算法包括節點區段及主區段。主區段包含五個主模組,亦即,建立及儲存模組(未圖示),外加代碼模組402、浮動模組404、固定模組406及恆星模組408。
用於CFFS演算法位置資料之所需資料。在一實施例中,位置資料包括相位及代碼觀測、如由接收器所給出之接收時間、廣播資料、導航資料中之一或多者。
CFFS演算法經組配以縮減或最小化頻寬之使用。此意謂此資料之某一處理必須在網路上被發送之前完成。在一實施例中,該演算法被分裂於多個硬體裝置之間,從而縮減自一個裝置傳輸至另一裝置之資料。
圖5展示多個裝置之間的演算法之分佈實例及輸入至該演算法之資料。該演算法經組配以得知用於接收器500及接收器502之相對定位解。
接收器500及502可被視為向該演算法供應其資料之資料源。舉例而言,此資料含有代碼、相位、時間及導航資訊。
節點116A及116B採取原始資料,處理原始資料,且接著將此經處理資料發送至主區段504。在一實施例
中,主區段504包含來自圖4之模組中之一或多者,例如代碼模組402、浮動模組404、固定模組406及/或恆星模組408。
在一實施例中,每一節點116含有不同相位、代碼及時間資料,而導航資料為全部節點所共有。
圖6及圖7展示CFFS演算法之更詳細視圖。舉例而言,更特別詳細地闡明節點116、建立及儲存模組600、浮動模組404、固定模組406及恆星模組408之功能。
圖8展示經組配以最小化演算法之節點區段與主區段之間的資料流程的實例。不在節點與主區段之間傳遞導航資料及代碼觀測。在一實施例中,所傳遞者包含外推至共同秒基曆元 (t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測。
(t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測。
另外,偶爾地將基於平均化自主代碼之解 連同接收編號B一起傳遞至主區段。
連同接收編號B一起傳遞至主區段。
在一實施例中,由代碼模組402產生之代碼解需要被傳遞僅一次,且因此促使不顯著分率之資料在節點與主區段之間流動。
通常,GPS接收器設法採取其以秒計的觀測,且其已在某種程度上變成用於量測之實際的標準。舉例而言,Ublox LEA-6T採取其以秒±0.5ms計的觀測。接收器獨立交換格式(Receiver Independent Exchange Format;RINEX)觀測檔案通常亦對準至秒。在一實施例中,一實施例中之CFFS演算法經組配以對大致對準至秒之觀測進行
工作。
圖9展示由節點區段之實施例實施的演算法之實例。方法900包括自接收器208接收902資料。
在一實施例中,自接收器208接收之位置資料包含外推至共同秒基曆元 (t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測。另外,位置資料偶爾地包含基於平均化自主代碼之解
(t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測。另外,位置資料偶爾地包含基於平均化自主代碼之解 ,以及接收編號B。
,以及接收編號B。
該方法包括至少部分地自經接收資料判定904自主方位解X B 。在一實施例中,該方法進一步包括針對給定接收時間T B 判定時脈偏差△ ,如由接收器所給出。
,如由接收器所給出。
GPS信號及載波頻率係自單一時間源導出且彼此同步,因此除了致使該等信號以較高位準彼此同步以外亦致使該等信號彼此位元定相。
在一實施例中,假定衛星時脈保持完美頻率,則衛星在時間t發送之瞬時L1波前W TX (t)可被書寫如下:

在一實施例中,以上方程式用以計算X B 及/或△ 。
。
在一實施例中,該方法進一步包含判定906自主方位解X B 之運行平均值。此運行平均值被稱作 。
。
在一實施例中,該方法進一步包含判定908表示經判定觀測估計所針對之秒的t之值。用於接收時間t B 之估計被計算為 。
。
使用反覆以判定在傳輸時間至接收時間之衛星距離。在一實施例中,衛星距離係例如藉由
 而計算。衛星傳輸時間係例如
藉由
而計算。衛星傳輸時間係例如
藉由 而計算。衛星之徑向速度係例如藉
由下式而計算:
而計算。衛星之徑向速度係例如藉
由下式而計算:

在一實施例中,t之值最初被設定為t B 。針對可接受性來檢查910 t之值。若t與t B 之間的絕對差|t-t B |高於臨限值,則捨棄針對此秒所判定之估計。該方法返回至步驟902,其等待來自接收器之資料。
在一實施例中,臨限值包含比針對此秒所判定之估計被捨棄之時間多大約200ms。在一實施例中,臨限值包含比針對此秒所判定之估計被捨棄之時間多大約500ms。
在一實施例中,亦針對可接受性來檢查衛星之信號強度。舉例而言,若信號強度太弱、狀況不良,及/或相位未被追蹤,則捨棄針對此秒所判定之估計。該方法返回至步驟902,其等待來自接收器之資料。
在一實施例中,該方法包括針對共同曆元t判定912經外推之包裝相位可觀測量。用於計算此可觀測量
之實例方程式包括
在一實施例中,該方法包括傳輸914外推至
共同秒基曆元 (t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測中之一或多者。在一實施例中,定期地傳輸此等值。
(t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相位觀測中之一或多者。在一實施例中,定期地傳輸此等值。
在一實施例中,該方法進一步包括偶爾地傳輸基於平均化自主代碼之解 。在一實施例中,不與步驟914中傳輸之值一樣頻繁地傳輸
。在一實施例中,不與步驟914中傳輸之值一樣頻繁地傳輸 值。
值。
在一實施例中,至少部分地藉由能夠被搜集的能量之可用量來判定定期地及偶爾地傳輸之值之頻率。
在一實施例中,一旦 (t)、S及/或t值變得可用且若存在足夠能量來發送該等值,就優先定期地發送該等值。
(t)、S及/或t值變得可用且若存在足夠能量來發送該等值,就優先定期地發送該等值。
在一實施例中,若在傳輸 (t)、S、B及/或t值之後剩餘足夠能量,則在
(t)、S、B及/或t值之後剩餘足夠能量,則在 (t)、S、B及/或t值之後僅傳輸用於
(t)、S、B及/或t值之後僅傳輸用於 之值。此意謂偶爾地傳輸
之值。此意謂偶爾地傳輸 值。
值。
在一實施例中,當節點耗盡能量時,該方法暫停或停止。
在一實施例中,該演算法之主區段採取由節點區段給出之資料且計算相對方位解。
圖10展示由建立及儲存模組600實施之演算法之實例。在一實施例中,建立及儲存模組經組配以至少部分地根據自節點區段接收之資料來計算相對方位解。
在一實施例中,經接收資料包括外推至共同秒基曆元 (t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相
位觀測中之一或多者。
(t)、衛星識別符(例如衛星編號S)、接收器識別符(例如接收器編號B)及此等觀測估計針對t之秒的包裝相
位觀測中之一或多者。
在一實施例中,經接收資料包括基於平均化自主代碼之解 。
。
圖10所展示之方法1000自包裝相位觀測判定包裝雙差。建立及儲存模組例如自節點區段接收1002節點資料。
在一實施例中,該方法包括自包裝相位觀測 (t)、
(t)、 (t)、
(t)、 (t)、
(t)、 (t)中之一或多者外推1004至共同曆元。
(t)中之一或多者外推1004至共同曆元。
在一實施例中,該方法包括自包裝相位觀測判定1006至少一個可能包裝雙差 (t)。在一實施例中,該方法包括判定全部此等可能包裝雙差。
(t)。在一實施例中,該方法包括判定全部此等可能包裝雙差。
在一實施例中,該方法包括自導航資料判定1008差量範數△n S2S1。
在一實施例中,建立及儲存模組將包裝雙差 (t)、差量範數△n S2S1、共同曆元t中之一或多者儲存於記憶體中。
(t)、差量範數△n S2S1、共同曆元t中之一或多者儲存於記憶體中。
在一實施例中,代碼模組402計算第一相對方位解,且僅僅為先前節點區段中計算之兩個自主方位解之差。
一個實例方程式包含使 。
。
浮動模組404之實施例經組配以獲得具有幾公分之準確度的粗略解,以及用於固定階段之模糊度N估計及其共變數資訊。
圖11展示由浮動模組404實施之演算法之實例。雙差之實例模型如下:

外推至共同曆元之雙差之模型
包裝雙差係藉由包裝雙差建立演算法而給出,該演算法可經解開以藉由以下方程式來重新建立雙差估計:f(x)=[x+0.5]-0.5
在一實施例中,此解開產生整數N,其對於至此等兩個衛星之全部觀測在全部時間內係固定的。假定 對於至此等兩個衛星之全部觀測在全部曆元t k 內係固定的。
對於至此等兩個衛星之全部觀測在全部曆元t k 內係固定的。
在一實施例中,解開雙差給出方位估計 ,其中λ'=λ/C f 可被判定如下:
,其中λ'=λ/C f 可被判定如下:

以具有至許多衛星之許多觀測的矩陣形式獲得下式,其中rBA為殘餘向量:

以上方程式集合對於每一對衛星具有僅一個未知整數N,以及具有三個未知方位變數。方程式之數目可比未知數之數目大得多,因此,此形式適合於使用最小化殘餘之均方誤差的LS予以求解。
因為係線性方法,所以整數N解最終為因此
由該演算法命名之「浮點」數。解開演算法需要全部可能雙差,而LS所需要之雙差集合為線性獨立集。
使用參考衛星來建立用於LS之獨立集,其中用於每一曆元之一個衛星被選擇為參考衛星,且彼曆元內之全部雙差必須含有此參考衛星。參考衛星被選擇為在逐個曆元基礎上具有最高仰角之衛星。具有最高仰角之衛星被假定為具有最少雜訊,且因此將最少誤差量引入至LS解。此會移除雙差之中的線性相依性,但然而不會移除每一曆元中之雙差之中的隨機相依性。吾人忽略隨機相依性。
以上矩陣方程式具有以下形式:

LS解將產生以下估計:
 ,其中共變數為
,其中共變數為
使用LS而對解進行求解取決於用於解開的 之初始方位估計。假定在給出近似解的情況下首先解開資料接著對解進行求解之此程序產生更準確解。可在給出解之較佳近似的情況下再次解開資料。
之初始方位估計。假定在給出近似解的情況下首先解開資料接著對解進行求解之此程序產生更準確解。可在給出解之較佳近似的情況下再次解開資料。
可重複此處理程序直至解不會改變許多。因此,使用反覆方法,其將輸出解回饋至初始方位估計中以產生新解。
繼續此反覆直至收斂或發散。當反覆計數變得太大或明顯相異的解重複時,解被假定為發散。當輸入解估計與輸出解彼此非常類似時假定收斂。為了有助於避
免收斂至不正確解,將浮動演算法運行兩次。第一次,其被反覆直至收斂或發散,其中代碼解為初始解;第二次,其被反覆僅一次,且昨天的最佳解用作用於浮動演算法之初始解。具有包裝殘餘之最小均方誤差的解被選擇為正確解。
參看圖11,在一實施例中,方法1100首先檢查1102存在足夠包裝雙差且存在初始解 。若此等條件中之任一者失效,則該方法失效。
。若此等條件中之任一者失效,則該方法失效。
在一實施例中,該方法包括獲得1104雙差估計。在一實施例中,上文所描述之解開演算法用以在給出解估計 的情況下解開至少一個雙差,以獲得用於至少兩對衛星之雙差估計
的情況下解開至少一個雙差,以獲得用於至少兩對衛星之雙差估計 (t k ,
(t k ,  )。在一實施例中,解開全部雙差。在一實施例中,針對全部對衛星獲得雙差估計。
)。在一實施例中,解開全部雙差。在一實施例中,針對全部對衛星獲得雙差估計。
在一實施例中,該方法包括選擇1106參考衛星。形成雙差之獨立集,使得對於每一曆元,具有最高仰角之衛星被選擇為參考衛星。
在一實施例中,該方法包括僅使用上文所形成之雙差之獨立集來形成1108觀測矩陣。在一實施例中,觀測矩陣如下:
在一實施例中,該方法包括界定1110LS解估計及共變數矩陣。LS用以得知用於未知數之估計,以及共
變數估計。
所得LS解估計之實例為 。共變數矩陣之
實例為
。共變數矩陣之
實例為 。
。
針對收斂或發散來檢查1112解。若不存在收斂或發散,則該方法返回至步驟1104。否則輸出1114解。
在一實施例中,昨天的最佳解估計用作用於浮動演算法之初始解。運用僅僅一次反覆來再次進行浮動演算法。若此解之包裝殘餘之均方誤差小於反覆浮動解之均方誤差,則輸出此解。
在一實施例中,固定模組406經組配以使用方位估計、模糊度估計及來自浮動區段的模糊度估計之共變數來改良浮動解之準確度。
固定解固定整數N S ,亦被稱作固定整數模糊度,或僅僅固定模糊度。浮動解方法為線性方法,且因此,N S 在藉由LS方法予以求解時不為其應為之整數。
若N S 可固定至正確整數,則未知數之數目自為方位向量加全部N S 縮減至僅僅方位向量。若N S 被設定為正確值,則此具有產生更準確解之潛在效應。
為了固定模糊度,使用拉目達演算法經由ILS而將共變數以及自浮動解 及
及 獲得之模糊度估計自身固定至整數。接著使用固定模糊度
獲得之模糊度估計自身固定至整數。接著使用固定模糊度 以校正解開雙差,且因此自以上方程式移除整數模糊度以產生下式:
以校正解開雙差,且因此自以上方程式移除整數模糊度以產生下式:

接著可在以上方程式上使用LS以獲得固定解估計 。接著使用解
。接著使用解 以藉由捨位至最近解平面且獲得另一LS估計來獲得另一固定解。在此步驟中,在如下給出解
以藉由捨位至最近解平面且獲得另一LS估計來獲得另一固定解。在此步驟中,在如下給出解 的情況下,向每一雙差給出一整數模糊度且將該整數模糊度經捨位至最近解平面,其中f()為鋸齒形差函數。
的情況下,向每一雙差給出一整數模糊度且將該整數模糊度經捨位至最近解平面,其中f()為鋸齒形差函數。

自以上方程式,LS可用以使用以下方程式來獲得解 :
:

此解亦為固定解,但在進行此捨位時,在解開的同時引入的任何循環滑移被移除,此係因為此捨位對於循環滑移係不變的。
預期到,在給出實際真解的情況下的殘餘之均方誤差將產生用於全部給定解之最低值。由此,需要在固定演算法中包括一個最終步驟,藉以比較用於今天的最佳估計之殘餘之均方誤差與昨天的最佳估計。
若使用昨天的最佳估計之殘餘之均方誤差
相比於使用今天的最佳估計之殘餘之均方誤差產生較低值,則此意謂出於任何原因而很可能使昨天的最佳估計相比於今天的當前估計為今天的較佳估計。在此狀況下,需要使用昨天的最佳估計而將雙差捨位至最近解平面,且接著使用最小平方以得知今天的新估計。
圖12展示由固定模組406實施之演算法之實例。方法1200檢查1202  、
、 及
及 之存在。若此等變數中之一者不存在,則方法1200失效。
之存在。若此等變數中之一者不存在,則方法1200失效。
在一實施例中,在給出模糊度共變數 的情況下,該方法使用ILS以得知1204
的情況下,該方法使用ILS以得知1204  之整數估計
之整數估計 。
。
在一實施例中,該方法基於整數模糊度估計 來校正1206雙差。用以進行此校正之方程式之實例如下:
來校正1206雙差。用以進行此校正之方程式之實例如下:
在一實施例中,該方法使用LS以獲得1208對以下方程式之第一解估計 :
:

在一實施例中,在給出解 的情況下,該方法將雙差捨位1210至最近解平面。在一實施例中,使用以下方程式:
的情況下,該方法將雙差捨位1210至最近解平面。在一實施例中,使用以下方程式:

在一實施例中,該方法使用LS以獲得1212對
以下方程式之第二解估計 :
:

在一實施例中,該方法比較使用昨天的最佳解估計P yesterday 的包裝殘餘之均方誤差與使用 的包裝殘餘之均方誤差。若均方誤差較少使用昨天的解,則
的包裝殘餘之均方誤差。若均方誤差較少使用昨天的解,則 被指派P yesterday 之值。如步驟1210中所闡明而將雙差捨位至最近解平面,以如步驟1212中所闡明而獲得
被指派P yesterday 之值。如步驟1210中所闡明而將雙差捨位至最近解平面,以如步驟1212中所闡明而獲得 之新估計。
之新估計。
在一實施例中,下文闡明每天恆星濾波方程式,其中下標n表示天n,條記號為遍及匹配雙差之天內的平均值, 為平均多路徑偏差誤差,
為平均多路徑偏差誤差, 為先驗已知解之平均值,且r n 為雙差殘餘。
為先驗已知解之平均值,且r n 為雙差殘餘。
已出於清晰起見而省略用於天內時間(同一天內之時間)、衛星及接收器命名法之全部記號。

下文更完全地導出及探索以上方程式。
在一實施例中,恆星模組408經組配以進行恆星濾波,其中衛星群集大致每隔24小時246秒(亦被錯誤地稱作GPS恆星日)而重複。因為真實恆星日長度在地球上為大約24小時236秒,所以其係錯誤的。
若屬於一對衛星及一對接收器之雙差在時間上被分離整數數目個標稱GPS衛星軌道重複週期且在不同恆星日,則該等雙差被視為匹配。
因為多路徑隨GPS接收器之周圍環境及衛星幾何形狀而變,所以只要GPS接收器之周圍環境相對於GPS接收器不改變,則多路徑誤差就應自一個恆星日至下一恆星日幾乎相同。
條記號為在可能時包括當前日n所計算之算術平均值。對於在日n的r k ,此為 ,其中Ω含有匹配殘餘(匹配雙差之殘餘)之集合;在此特定例項中,{r n }表示僅含有r n 之集合且確保
,其中Ω含有匹配殘餘(匹配雙差之殘餘)之集合;在此特定例項中,{r n }表示僅含有r n 之集合且確保 被明智地界定。此意謂可存在供求平均值的m天,但Ω可含有少得多的輸入項。
被明智地界定。此意謂可存在供求平均值的m天,但Ω可含有少得多的輸入項。
為了計算恆星濾波解,需要計算 、
、 、r n 及(r n -
、r n 及(r n - )。不正確地估計雙差整數模糊度會潛在地引入雙差殘餘之整數模糊度偏移。
)。不正確地估計雙差整數模糊度會潛在地引入雙差殘餘之整數模糊度偏移。
因此,代替直接計算(r n - ),除了使用來自過去m個連續日(包括日n,但排除日k)之固定解的預期觀測堆疊以外,亦需要使用關於有偏方位來使用絕對包裝殘餘堆疊之整數模糊度不變方法,其中∥
),除了使用來自過去m個連續日(包括日n,但排除日k)之固定解的預期觀測堆疊以外,亦需要使用關於有偏方位來使用絕對包裝殘餘堆疊之整數模糊度不變方法,其中∥ -
- ∥過多,以便防止離群值影響恆星解。
∥過多,以便防止離群值影響恆星解。





以此方式,(r n - )之計算相對於經估計雙差整數模糊度係不變的。以上方程式表示一個雙差,需要許多方程式來使用LS,因此,需要使用矩陣記號且如下描述
演算法之實施方案,其中a p 為近似衛星群集重複週期(如已經陳述的大約24小時246秒)。
)之計算相對於經估計雙差整數模糊度係不變的。以上方程式表示一個雙差,需要許多方程式來使用LS,因此,需要使用矩陣記號且如下描述
演算法之實施方案,其中a p 為近似衛星群集重複週期(如已經陳述的大約24小時246秒)。
圖13展示由恆星模組408實施之方法1300之實例。首先藉由選擇P B 之值作為自固定模組獲得之第一一直固定解來初始化P B 之值。
在一實施例中,該方法包括將包裝殘餘r k 暫時地移位1302a p 之整數倍以將其與今天(日n)對準。
在一實施例中,方法1300判定1304有偏包裝殘餘。用以進行此功能之方程式之實例為:

在一實施例中,該方法排除1306離群值。一種用於排除離群值之技術係自m日中排除全部日k,其中∥ -
- ∥高於臨限值。此會潛在地防止離群值影響恆星解。
∥高於臨限值。此會潛在地防止離群值影響恆星解。
在一實施例中,臨限值為大約1cm。在一實施例中,臨限值為大約2cm。
在一實施例中,該方法判定或獲得1308平均值。平均值之一個實例為遍及來自m日之全部匹配雙差的全部|r k |之平均值以產生 。平均值之另外實例為遍及來
自m日之全部匹配雙差的全部N.
。平均值之另外實例為遍及來
自m日之全部匹配雙差的全部N. 之平均值以產生
之平均值以產生 。
。
在一實施例中,該方法判定1310估計。舉例
而言, 。接著使用LS以求解
。接著使用LS以求解
 且因此獲得Pn之估計。此估
計被稱作
且因此獲得Pn之估計。此估
計被稱作 。
。
函數magmin(x,y)選擇具有最小絕對量值之自變數的傳回值。已確認,每一衛星重複週期隨衛星不同而不同。出於簡單起見,a p 之值被選擇為固定值,例如24小時246秒。
對於浮動階段及固定階段兩者,使用LS來求解線性方程式集合。因為在方程式中使用全部雙差的情況下可按照兩個其他雙差 之加法或減法來建立每一雙差,所以可因為每一單一差促成不同量的雜訊而產生有偏解。
之加法或減法來建立每一雙差,所以可因為每一單一差促成不同量的雜訊而產生有偏解。
在一實施例中,使用獨立集以避免此情形。為了決定哪些雙差被保留且哪些雙差被移除,使用參考衛星。參考衛星為必須在每一雙差中出現的每一曆元中之衛星。此產生雙差之星形型樣,其中已相對於此參考衛星而採取每一雙差。哪些參考衛星被使用可對方位解造成大的差異;此係因為參考衛星將其雜訊引入至方程式集合中之每一方程式中。
因此,將參考衛星選擇為具有最低雜訊之衛星會潛在地產生最準確解。選擇參考衛星之典型方法係歸因於具有高仰角之衛星具有低雜訊及低多路徑之假定而選擇具有最高仰角的衛星。
參考衛星之選擇可變更最終解之準確度且對於基於精確差之解係關鍵的。演算法之固定階段及浮動階段兩者皆使用參考衛星之想法且使用同一獨立雙差集合。
相比於隨機地選擇參考衛星,選擇具有最高
仰角之衛星作為參考衛星會潛在地在全部方向上產生較小方差。
標題為「GPS基礎(GPS basics)」之附錄A提供基於GPS信號之背景閱讀。
標題為「差分化相位可觀測量(Differencing the phase observable)」之附錄B闡釋解處理之更特定態樣。
標題為「在夜晚之節點功能性(Node functionality at night)」之附錄C提供用以在夜晚獲得觀測之實驗之細節。
標題為「網路(Network)」之附錄D描述用以建立通訊網路之實施例的結構及演算法。
標題為「第3章-多路徑及恆星濾波(Chapter 3-Multipath and sidereal filtering)」之附錄E描述既在已實施恆星濾波之前亦在已實施恆星濾波之後解在一實施例中採取的形式。
標題為「第4章-演算法比較(Chapter 4-Algorithm comparison)」之附錄F比較使用上文所揭示之實施例而獲得的解與自其他解處理軟體獲得的解。
標題為「第6章-試驗台結果及分析(Chapter 6-Testbed results and analysis)」之附錄G描述兩個實驗之結果及分析。
本發明之前述描述包括其較佳形式。可在不脫離如由隨附申請專利範圍所界定的本發明之範疇的情況下對該等較佳形式進行修改。
GPS基礎
在此附錄中,大體上介紹GPS操作,且尤其是與使用單頻帶接收器來獲取用於求解方位解之觀測相關的態樣。
A.1 GPS信號
截至書寫為止,GPS當前正經歷現代化以改良民用用途及軍用用途兩者。在1990年與2004年之間發射了傳統衛星,而自2005年起已發射現代化衛星。根據國家空間定位、導航及定時協調辦公室[16],此致力於升級GPS之特徵及效能。當前,GPS在自衛星至終端使用者之三個不同RF鏈路上傳輸。RF鏈路被稱為L1、L2及L5,且在供其進行傳輸之頻帶之後被命名。分碼多重存取(CDMA)用作通道存取方法,因此全部衛星使用相同載波頻率。L1具有如自地球所見的1575.42Mhz之標稱頻率,L2具有1227.60Mhz之標稱頻率,且L5具有1176.45Mhz之標稱頻率。此等標稱頻率係運用各種信號予以調變以輔助導航。當前GPS現代化由以下各者組成:大體上改良硬體,以及添加在RF鏈路上發送之更多信號。當前在進行中之GPS現代化將花費許多年,且在L1上產生諸如L1C之信號的衛星被預期為直至2016年才發射,預期到大約2026年有24顆衛星[31]。因為吾人僅關注單頻帶接收器,此係因為其相比於多頻帶接收器較便宜且當前沒有新的現代化信號在L1上進行操作,所以吾人在此處將吾人之研究限定於傳統L1信號之研究。

L1上之GPS傳統信號由以下各者組成:在1.023Mb/s下發送的被稱為C/A之粗略獲取偽隨機數(PRN)代碼、在10.23Mb/s下發送的在被加密的情況下被稱為Y之精確PRN代碼P,及在50b/s下發送的被稱為NAV之導航資料。兩個PRN代碼對於每一衛星係唯一的,且每一PRN代碼擴展導航信號。PRN代碼之位元亦被稱為碼片。L1由同相及正交分量組成。每一分量係使用二元相移鍵控(BPSK)作為其調變技術而被單獨地調變。一個調變器被供應來自P(Y)與NAV之模2加法的位元串,而另一調變器被供應來自C/A與NAV之模2加法的位元串。信號及載波頻率係自單一時間源導出且彼此同步,因此除了致使該等信號以較高位準彼此同步以外亦致使該等信號彼此位元定相。圖A.1描繪此等信號之產生的方塊圖。假定衛星時脈保持完美頻率,則衛星在時間t發送之瞬時L1波前W TX (t)可被書寫如下。

其中S(t)=NAV(t)(P(Y)(t)e i0+C(t)e iπ/2)為複合信號,C(t)為C/A代碼,P(Y)(t)為P(Y)代碼,NAV(t)為導航資料, 為在時間0之衛星振盪器相位,A TX 為傳輸振幅,
為在時間0之衛星振盪器相位,A TX 為傳輸振幅, 為在時間0之衛星振盪器相位,f TX 為如自地球所見的標稱衛星振盪器頻率以便考量一般相對論性效應,f 0為如自地球所見的1575.42Mhz,且
為在時間0之衛星振盪器相位,f TX 為如自地球所見的標稱衛星振盪器頻率以便考量一般相對論性效應,f 0為如自地球所見的1575.42Mhz,且 為在時間0之衛星複合信號偏移。C、P(Y)、NAV
為在時間0之衛星複合信號偏移。C、P(Y)、NAV  {-1,1}且為函數以便產生正確複合信號,中已應用0→1及1→-1之映射。在接收器處,假定無大氣阻礙,則接收器在時間t接收之瞬時L1波前W RX (t)可被書寫如下。
{-1,1}且為函數以便產生正確複合信號,中已應用0→1及1→-1之映射。在接收器處,假定無大氣阻礙,則接收器在時間t接收之瞬時L1波前W RX (t)可被書寫如下。

其中A RX 為接收振幅,且△t(t)為自在傳輸時間之衛星至在接收時間t之接收器的傳輸飛行時間。重要的是認識到,△t(t)並非在時間t之衛星與接收器之間的飛行時間,而是基於接收器看到其之時的飛行時間。其類似於飛機經過且吾人聽到飛機之聲音的時間滯後於飛機實際上所在之處。如由聽者所判定的來自飛機之聲音之飛行時間不同於吾人將根據相對於相同接收時間計算飛機實際上所在之處至使用者而得到的飛行時間。
A.2 GPS接收器對經接收W
RX
(t)信號做什麼
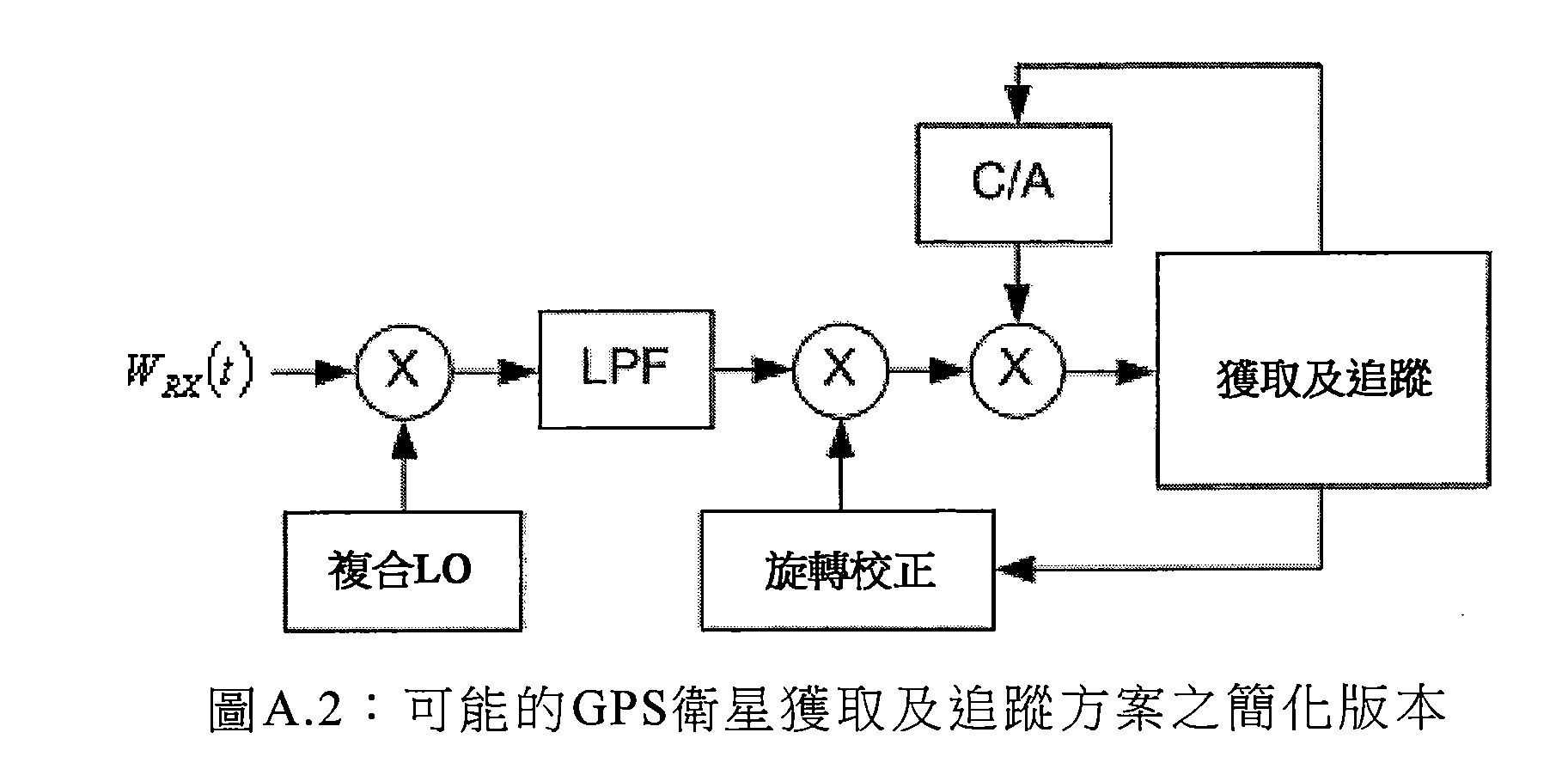
圖A.2展示GPS衛星接收器可做什麼以獲取衛星且追蹤其所產生之信號的簡化版本。在接收後,接收器就設法將信號與L1分離且追蹤C/A代碼及載波相位。此可藉由以下操作而有效地進行:將W RX (t)與複合本地振盪器 混頻,其中f RX 為振盪器之頻率,且
混頻,其中f RX 為振盪器之頻率,且 為在時間0的振盪器之相位;使用低通濾波器LPF進行濾波;接著進行相位及/或頻率追蹤以停止旋轉,以及校正C/A時序以匹配於如由衛星所發送之C/A代碼,以便獲取對正由衛星發送之資料的存取。
為在時間0的振盪器之相位;使用低通濾波器LPF進行濾波;接著進行相位及/或頻率追蹤以停止旋轉,以及校正C/A時序以匹配於如由衛星所發送之C/A代碼,以便獲取對正由衛星發送之資料的存取。
A.2.0.1 獲得基頻信號R(t)
在與本地振盪器混頻且使用低通濾波器進行濾波之後,接收器獲得以下基頻,其中,△f=f RX -f TX 且 。
。

吾人將t△f+△t(t)f TX +△ 定義為經接收差拍載波相位(載波相位)。
定義為經接收差拍載波相位(載波相位)。
A.2.0.2 停止旋轉
吾人看到,此為歸因於接收器之本地振盪器與衛星之振盪器之間的頻率差而旋轉及亦歸因於衛星自身相對於接收器之徑向運動而旋轉的四個點之群集。
若吾人使 ,則吾人可藉由如下而乘R(t)來校正旋轉。
,則吾人可藉由如下而乘R(t)來校正旋轉。

此阻止群集旋轉,且移除任何恆定群集旋轉偏移。此接著解析複合信號。因此,吾人將Φ(t)定義為接收器之經估計之經接收差拍載波相位(經估計載波相位)。群集之相位(或等效地為群集之旋轉偏移)被定義為載波相位與經估計載波相位之間的差t△f+△t(t)f TX +△ -Φ(t)。更一般而言,只要經估計載波相位與載波相位同相,群集就停止旋轉且不存在恆定群集旋轉偏移。
-Φ(t)。更一般而言,只要經估計載波相位與載波相位同相,群集就停止旋轉且不存在恆定群集旋轉偏移。
A.2.0.3 C/A代碼對準
在已藉由使經估計載波相位與載波相位同相而停止群集旋轉之後,C/A代碼之本地複本必須與複合信號混頻且在時間上相移,直至C/A代碼之本地複本與經接收複合信號中之C/A代碼同相。吾人接著將τ(t)定義為C/A代碼對準偏移且為傳入C/A與本地複本未對準的程度。吾人將C/A代碼之本地複本定義為LCA(t)=C(t+△T RX (t)),其中△T RX (t)為接收器之時脈偏移。首先,吾人注意到,若吾人將本地C/A複本偏移τ(t)且使τ(t)=△t(t)+△T RX (t)-△T TX (t)並將此經
偏移C/A與R(t)相乘,則吾人針對隨機時間t預期下式。

此係歸因於以下事實:P(Y)與C未很好地交叉相關,而當然C與其自身完美地相關。
LCA(t-τ(t))R(t)e -2πi(Φ(t))為至圖A.2中之獲取及追蹤區塊的輸入。在視覺上,LCA(t-τ(t))R(t)e -2πi(Φ(t))為在四個點無任何旋轉的情況下的群集。位於虛軸上之兩個點以一秒不大於50次緩慢地移動且含有導航資料,而位於實軸上之兩個點以均值為零之似隨機方式以一秒高達10.23百萬次極快速地移動。更一般而言,當發生此情形時,傳入C/A代碼與本地複本對準,且載波相位與經估計載波相位同相。
A.3 獲取、追蹤及NAV資料提取
A.3.0.1 使用濾波來提取NAV資料
當傳入C/A代碼與本地複本對準且載波相位與經估計載波相位同相時,可容易僅僅藉由使用低通濾波器來獲得導航資料NAV(t+△T TX (t)-△t(t))=-iLPF[LCA(t-τ(t))R(t)e -2πi(Φ(t))] (A.6)
此允許GPS接收器存取包括大量資料的衛星之導航資料,該大量資料包括衛星之△T TX (t)估計及特定導航資料轉變之傳輸時間。以及用以計算衛星方位之資料。
A.3.0.2 用於C/A代碼對準及旋轉之度量
吾人將t限定為在小於NAV之週期的小時間段2δ內,同時仍確保足夠長週期,使得P(Y)與C遍及彼週期內仍未很好地相關。找到此時間段係可能的,此係因為NAV之週期比P(Y)之週期長204600倍。吾人假定C/A代碼完美地對準且載波相位與經估計載波相位同相。吾人接著預期下式。


因為導航資料具有恆定量值1,所以歸因於不正確估計τ(t)的LCA(t-τ(t))與C(t+△T TX (t)-△t(t))之間的相關性之任何不完美性將影響所獲取導航資料之量值。另外,造成旋轉群集運動之不正確估計Φ(k)將在積分之後亦負面地影響所獲取導航資料之量值。因此,吾人可說明下式,其中γ被定義為C/A代碼之本地時移複本與經接收之可旋轉的C/A代碼之間的相關性係數。

更一般而言,此係數可運用平均化予以更準確地計算;因此,GPS接收器可將其計算如下。

平方會消除BPSK之正負號。γ之量值與C/A代碼的對準程度及群集之旋轉運動的停止程度相關,而γ之角度與群集之具有半循環模糊度的恆定旋轉偏移相關。恆定群集旋轉
偏移不會影響γ之量值,此係因為恆定旋轉偏移剛好為可自積分中取出的常數。因此,當C/A代碼完美地對準且群集不旋轉時γ將被最大化,而γ對於群集之恆定旋轉偏移係不變的。
˙當C/A代碼對準且群集不旋轉時|γ|被最大化。
在將Φ及τ視為變數的情況下,GPS接收器可變化Φ及τ以最大化γ。若γ高於某一臨限值,則GPS接收器可假定衛星被獲取且開始追蹤τ、Φ,並解碼NAV資料。
吾人關注最大化γ,此係因為當γ為最大值時,在添加某一模糊度的情況下,Φ及τ兩者分別為t△f+△t(t)f TX +△ 及△t(t)+△T RX (t)-△T TX (t)之良好估計,此被證明為有用於得知方位解。另外,當γ被最大化時,吾人能夠獲得亦有用於得知方位解之導航資料。
及△t(t)+△T RX (t)-△T TX (t)之良好估計,此被證明為有用於得知方位解。另外,當γ被最大化時,吾人能夠獲得亦有用於得知方位解之導航資料。
A.3.0.3 未知函數τ及Φ之一階線性近似
吾人希望最大化相關性係數γ。歸因於γ相對於Φ及τ之量值之表面形狀,需要Φ及τ兩者之初始估計。在無良好初始估計的情況下,γ係由雜訊產生標準追蹤方案(諸如鎖相迴路(PLL)、鎖頻迴路(FLL)、延遲鎖定迴路(DLL)及早/晚時間無用)支配。其就像設法追蹤長草中之螞蟻爬行一樣;你必須在可追蹤螞蟻之前發現螞蟻,此係因為草使難以自遠處看到螞蟻。
首先,吾人建立Φ及τ如何改變之一階線性近似模型。吾人已經看到,當Φ(t)=t△f+△t(t)f TX +△ 及τ(t)=△t(t)+△T RX (t)-△T TX (t)時,吾人能夠停止旋轉且對準吾人
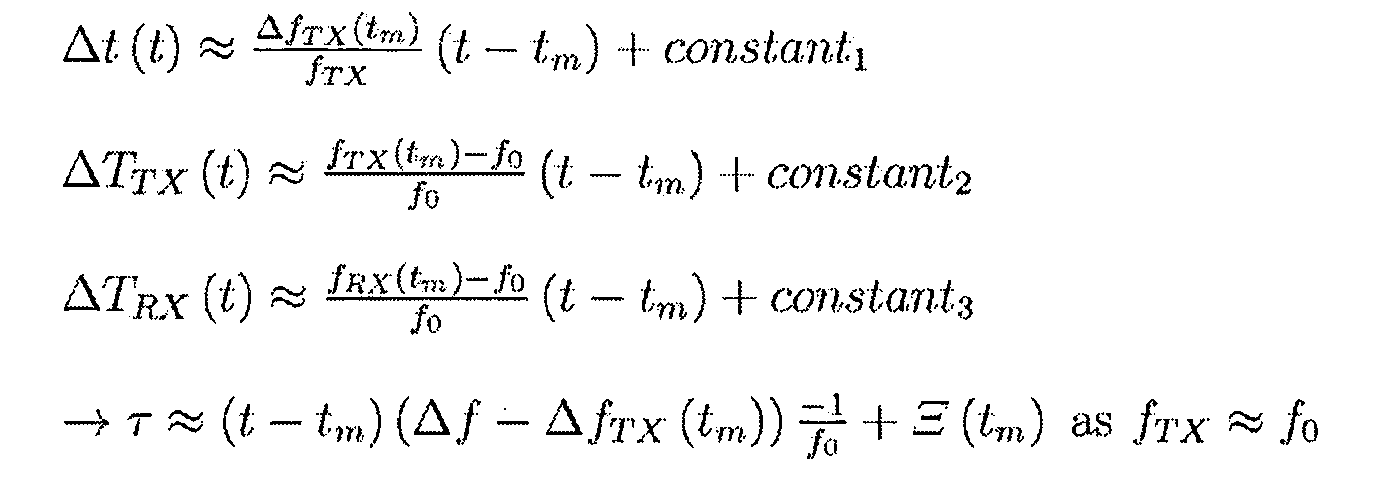
之本地C/A代碼複本與傳入C/A代碼。因此,此等為吾人正尋找的Φ及τ。下文書寫此等兩個方程式之線性近似,其中F(t m )=(△f+△f TX (t m )),△f TX (t m )為歸因於在時間t m 之多普勒(Doppler)的f TX 之頻率改變,其中正值係針對衛星移離接收器,且θ(t m )及Ξ(t m )為一些常數。可在A.5.1及A.5.2中找到證明。
及τ(t)=△t(t)+△T RX (t)-△T TX (t)時,吾人能夠停止旋轉且對準吾人
之本地C/A代碼複本與傳入C/A代碼。因此,此等為吾人正尋找的Φ及τ。下文書寫此等兩個方程式之線性近似,其中F(t m )=(△f+△f TX (t m )),△f TX (t m )為歸因於在時間t m 之多普勒(Doppler)的f TX 之頻率改變,其中正值係針對衛星移離接收器,且θ(t m )及Ξ(t m )為一些常數。可在A.5.1及A.5.2中找到證明。


此等近似僅在F(t m )不快速地關於時間t m 改變的情況下才有效。速度將改變的最大速率為約0.1178ms -2且係衛星直接在頭頂之時(A.5.4)。在L1頻帶上,此暗示:若F(t m )在方程式A.13中保持不變,則群集旋轉速度將改變小於約0.9Hzs -1(參見A.5.3及A.5.4)。現在將此與F(t m )之範圍進行比較。△f TX (t m )可達約±5kHz(A.5.4),且取決於接收器時脈準確度,若吾人假定接收器時脈準確度為3.5ppm,則△f可超出另一5kHz。此意謂F(t m )之範圍為大約20kHz。若吾人將吾人之所關注時間限定於1ms,則F(t m )將改變小於0.0009Hz,其遠小於F(t m )的20kHz之範圍。因此,對於短時間段,此為有效近似。
方程式A.11及A.12形成Φ及τ將如何在短期內改變的近似模型。
A.3.0.4 關於獲取的未知函數τ及Φ之一階線性近似之進一步簡化
在圖A.2中,書寫如吾人已經看到的獲取及追蹤區塊之輸入,如在方程式A.13中。
LCA(t-τ(t))R(t)e -2πi(Φ(t)) (A.13)
為了獲取Φ及τ,吾人最初可對方程式A.11及A.12進行進一步簡化。方程式A.11中之θ(t m )在置放於方程式A.13中時對相對於時間改變群集旋轉沒有影響。A.13仍將為非旋轉四點群集,但僅僅具有θ(t m )循環之恆定旋轉偏移。如吾人已經在方程式A.10中所提及,任何恆定旋轉偏移對相關性係數之量值沒有影響。因此,吾人可在最初獲取Φ時忽略θ(t m )。
載波頻率比C/A代碼之位元速率大1540倍。因為頻率乘時間為相位,所以若F=10,000Hz,則對於Φ而言,花費0.025ms而改變四分之一循環,而對於C/A代碼而言,花費38.5ms而改變四分之一碼片。若吾人接著假定R以4.092Mb/s之速率的數位化且取樣1ms R,則吾人甚至往往不能在C/A代碼中直接偵測F=0與F=10,000之間的差,而其將易於在載波中被偵測。
歸因於此等兩個點,當考慮Φ及τ之初始獲取時吾人進行以下兩個近似。此處,吾人確認,群集將具有任意恆定旋轉偏移,僅在幾毫秒之時間段內才有效,且基頻取樣速率不大於每碼片幾次。


A.3.0.5 獲取
在此等兩個近似A.14及A.15的情況下,接收器可進行二維搜尋(F具有頻率維度且另一Ξ具有時間維度)以找到最大化方程式A.10中之相關性係數的點。假定接收器時脈準確度為3.5ppm,則接收器將必須自-10kHz搜尋至10kHz。因為C/A代碼為具有1ms週期之週期函數,所以接收器將必須自0ms搜尋至1ms。
藉由設法最大化本地C/A代碼複本與傳入C/A代碼之間的相關性來估計F及Ξ被證明為計算上要求使用比追蹤更多的能量,且為GPS接收器之主要關注。由此,已針對此問題進行許多研究以縮減用以估計此等兩個參數之計算努力[63]。藉由使用快速傅立葉變換(FFT)進行之並行化2D搜尋為當前在軟體界定接收器中使用之習知方法[63]。
作為一實例,吾人將本地C/A代碼複本與L1上之傳入C/A代碼複本交叉相關。吾人使用為碼片速率之標稱頻率之四倍的4.092Mb/s之取樣速率,並藉由以125Hz為步長將頻率項變化±10kHz且接著使用交叉相關而將時間項變化不大於±511.5碼片(±511.5碼片涵蓋整個1ms)進行搜尋。藉由使用隨機資料來模擬導航資料,而不添加P(Y)資料。將5000Hz之偏移應用於1.57542GHz載波頻率,且將250.15碼片之相位偏移應用於傳入信號之C/A代碼。在使用1ms之依序傳入資料的情況下,獲得圖A.3。

如可看到,在表示F及Ξ之估計的圖形中存在清晰峰值。使用關於最高峰值之內插的經估計相位偏移為250.18碼片,而頻率之偏移為5000Hz;此與確切值很好地匹配。自此圖清晰地看到在t與Φ無良好初始估計的情況下追蹤為何將不起作用。值得指出的是,內插值超出之0.03碼片等於光行進9m所花費的時間。此大致為廉價消費等級GPS接收器所具有的正確準確度級。
圖A.3中需要評估的點之數目為658,651。雖然較少點可能已被使用且仍能夠獲得F及Ξ之合理估計,但藉由2-D搜尋方法,始終固有地將存在大量需要評估的點。雖然存在諸如藉由使用FFT進行之並行化2D搜尋的其他方法且其計算上之要求較少及因此能量要求較少,但據吾人所知,
獲取仍使用比追蹤更多的能量。作為一實例,為現代消費等級GPS接收器之Ublox NEO-7N在其獲取狀態期間相比於其追蹤狀態使用多23%的能量[17]。
A.3.0.6 追蹤
一旦已進行獲取且已找到最大相關性係數之點,接收器就接著可使用諸如PLL、FLL、DLL及早/晚追蹤方法之標準技術來追蹤τ及Φ。線性近似不會阻止最大相關性係數點移動,但線性近似充分地減緩該點移動,使得吾人可將其視為靜止點,直至其已被找到,接著,吾人可僅僅隨著該點移動而追蹤該點。
自獲取獲得F及Ξ之估計,其經由方程式A.12給出τ(t)之估計。為了追蹤τ(t),則可使用早/晚追蹤。此方法通常由三個本地產生之C/A複本組成,一個C/A複本稍微在自衛星預期者前面,一個C/A複本係如自衛星所預期,且一個C/A複本稍微在自衛星預期者後面。
早LCA(t-τ(t)+ξ)
即時LCA(t-τ(t))
晚LCA(t-τ(t)-ξ)
接著使此等三個C/A複本各自與R(t)e -2πi(Φ(t))相關以產生三個相關性係數(γ E ,γ P ,γ L ),且在使用內插的情況下,可獲得τ(t)之新估計以使代碼保持對準。使代碼保持對準為用於最大化γ之兩個要求中的一者。
LCA(t-τ(t))R(t)具有自R移除C/A代碼之效應。此移除被稱為抹除代碼。一旦其被移除,就可在LCA(t-τ(t))R(t)上使用諸如PLL之載波追蹤方案,此係因為在一個方向上其表現為標準BPSK信號。可對LCA(t-τ(t))R(t)進行科斯塔斯(costas)PLL以估計Φ(t),此係因為其對於導航轉變係不變的。假定吾人設計科斯塔斯迴路以在虛軸上對準。接著,科斯塔斯迴路運用模糊度沿著虛軸對準NAV之BPSK信號,其對準係圍繞模糊度。科斯塔斯迴路亦將阻止群集旋轉,此為用於最大化γ之兩個要求中的一者。
因此,在同時使用代碼追蹤及載波追蹤的情況下,可連續地追蹤最大相關性點。對於接收器而言僅僅追蹤τ(t)或Φ(t)中之僅一者並不足夠;兩者需要被同時追蹤。
吾人已經看到,在A.3.0.2中,τ(t)=△t(t)+△T RX (t)-△T TX (t)暗示最大相關性。歸因於1ms C/A模糊度,相反情形並不成立。因此,吾人可說最大相關性暗示τ(t)=△t(t)+△T RX (t)-△T TX (t)+M/1000,其中M為某一固定整數。
同樣地, 暗示最大相關性,但歸因於載波相位循環模糊度及γ被最大化用於任何恆定旋轉偏移,相反情形並不成立。科斯塔斯迴路運用一半循環之模糊度移除恆定旋轉偏移,且若PLL累積其相位偏移,而非隨著其經歷零角度而將其重設,則最大相關性暗示針對某一固定整數N之
暗示最大相關性,但歸因於載波相位循環模糊度及γ被最大化用於任何恆定旋轉偏移,相反情形並不成立。科斯塔斯迴路運用一半循環之模糊度移除恆定旋轉偏移,且若PLL累積其相位偏移,而非隨著其經歷零角度而將其重設,則最大相關性暗示針對某一固定整數N之 。
。
當考慮此等模糊度時τ及Φ變成由幾乎全部低端消費等
級GPS接收器用於方位解計算的兩個可觀測量。
A.4 可觀測量
可觀測量為GPS接收器可直接量測之量的由GPS接收器採取之量測。可觀測量不會直接告知你GPS接收器位於何處,但藉由使用各種技術將允許你計算告知你GPS位於何處的方位解。吾人考慮的兩個可觀測量為代碼可觀測量及相位可觀測量。
吾人已藉由使用早晚定時及科斯塔斯PLL來追蹤γ之最大點而看到,吾人已找到針對某一固定整數M之τ(t)=△t(t)+△T RX (t)-△T TX (t)+M/1000及針對某一固定整數N之 。到目前為止,此等分別為代碼可觀測量及相位可觀測量。然而,存在一些額外複雜化且其採取之形式可不同。
。到目前為止,此等分別為代碼可觀測量及相位可觀測量。然而,存在一些額外複雜化且其採取之形式可不同。
A.4.1 代碼可觀測量
一旦追蹤到γ,接收器就可存取導航資料。導航資料以每字30位元被發送。在一子訊框中存在10個字,從而花費6秒進行傳輸。每一子訊框含有指示自衛星傳輸導航資料之第一位元的前緣之確切時間的交遞字(HOW)字。在衛星中,每一NAV資料轉變之第一位元對準至C/A代碼之第一碼片。此係可能的,此係因為C/A代碼及NAV資料係自同一振盪器導出(參見A.1)。圖A.4展示C/A NAV時序關係。

因為每隔6秒之此唯一時戳及接收器連續地追蹤衛星之C/A代碼,所以C/A代碼之每一碼片可運用傳輸之確切時間予以唯一地識別。因此,接收器可求解代碼可觀測量中之模糊度M且因此可估計τ(t),使得τ(t)=△t(t)+△T RX (t)-△T TX (t)。
通常,代碼可觀測量係以公尺為單位且被稱為虛擬距離。藉由乘以光速c將τ(t)轉換成公尺會產生以下虛擬距離方程式,其中已出於簡潔起見而移除可變時間,且ρ為自在傳輸時間之傳輸器至在接收時間之接收器的距離。
p=ρ+c(△T RX -△T TX ) (A.16)
A.4.1.1 計算基於代碼之解
衛星之當前時脈偏差△T TX 係在導航資料中被傳輸且因此為已知值。因此,未知值為接收器之方位及時脈偏差;此等共同為P=[x,y,z,△T RX ]。此意謂虛擬距離為此等未知變
數之函數。獲得衛星之一個此類虛擬距離會產生以下非線性方程式。

因為求解線性方程式之簡易性,使用一階泰勒展開式來線性化此方程式對於導出求解任意大小之虛擬距離集合的一般化方法係明智的。吾人使經估計解為針對接收時間
之 。接著,關於
。接著,關於 之p n 之一階泰勒展開式如
下。
之p n 之一階泰勒展開式如
下。

在給出針對虛擬距離p n 在傳輸時間的衛星之方位S n =[x n ,y n ,z n ]的情況下,則可在給出ρ n (x,y,z)=
 的情況下計算偏導數。因此,
在評估後,方程式A.18就可被書寫如下。
的情況下計算偏導數。因此,
在評估後,方程式A.18就可被書寫如下。

在給出良好估計 的情況下,此方程式具有四個獨立未知數,因此需要正如其之至少四個方程式來求解未知數。此等四個方程式需要對於全部方程式相同的接收器之時脈偏差及對於全部方程式相同的接收器之方位。因此,接收器必須同時獲得四個虛擬距離。下文給出用於同時獲得的不同衛星之m個此等虛擬距離之集合。
的情況下,此方程式具有四個獨立未知數,因此需要正如其之至少四個方程式來求解未知數。此等四個方程式需要對於全部方程式相同的接收器之時脈偏差及對於全部方程式相同的接收器之方位。因此,接收器必須同時獲得四個虛擬距離。下文給出用於同時獲得的不同衛星之m個此等虛擬距離之集合。

因為方程式A.19係線性的,所以此虛擬距離集合可以矩陣形式被書寫如下。

在使用粗體記號向量或矩陣的情況下,此具有A(P- )
) b之形式,其中A、b及
b之形式,其中A、b及 係已知的。使用LS且重排未知數會得到P
係已知的。使用LS且重排未知數會得到P (A T A)-1A T b+
(A T A)-1A T b+ 。在計算時此方程式之右側僅得到所要解P之近似。因此,(A T A)-1A T b+
。在計算時此方程式之右側僅得到所要解P之近似。因此,(A T A)-1A T b+ 為另一
解估計且吾人將其表示為
為另一
解估計且吾人將其表示為 。因此,吾人
已看到自舊解估計獲得新解估計的方式。此處理程序可如以下演算法描述而重複。
。因此,吾人
已看到自舊解估計獲得新解估計的方式。此處理程序可如以下演算法描述而重複。


咸信由接收器T RX 在步驟3中產生接收時間之估計而對接收時間進行的校正對於大部分接收器而言將大約小於一毫秒且可以忽略。如步驟5中進行的計算傳輸時間之估計所需要的校正一般比較大,且大約為60ms,此係自衛星至接收器之近似飛行時間;此步驟不可忽略。
圖A.5展示針對六個衛星之集合及自其採取的代碼觀測的演算法A.1收斂之實例。如可看到,使用地球之中心作為六個反覆內之初始估計,演算法已收斂。
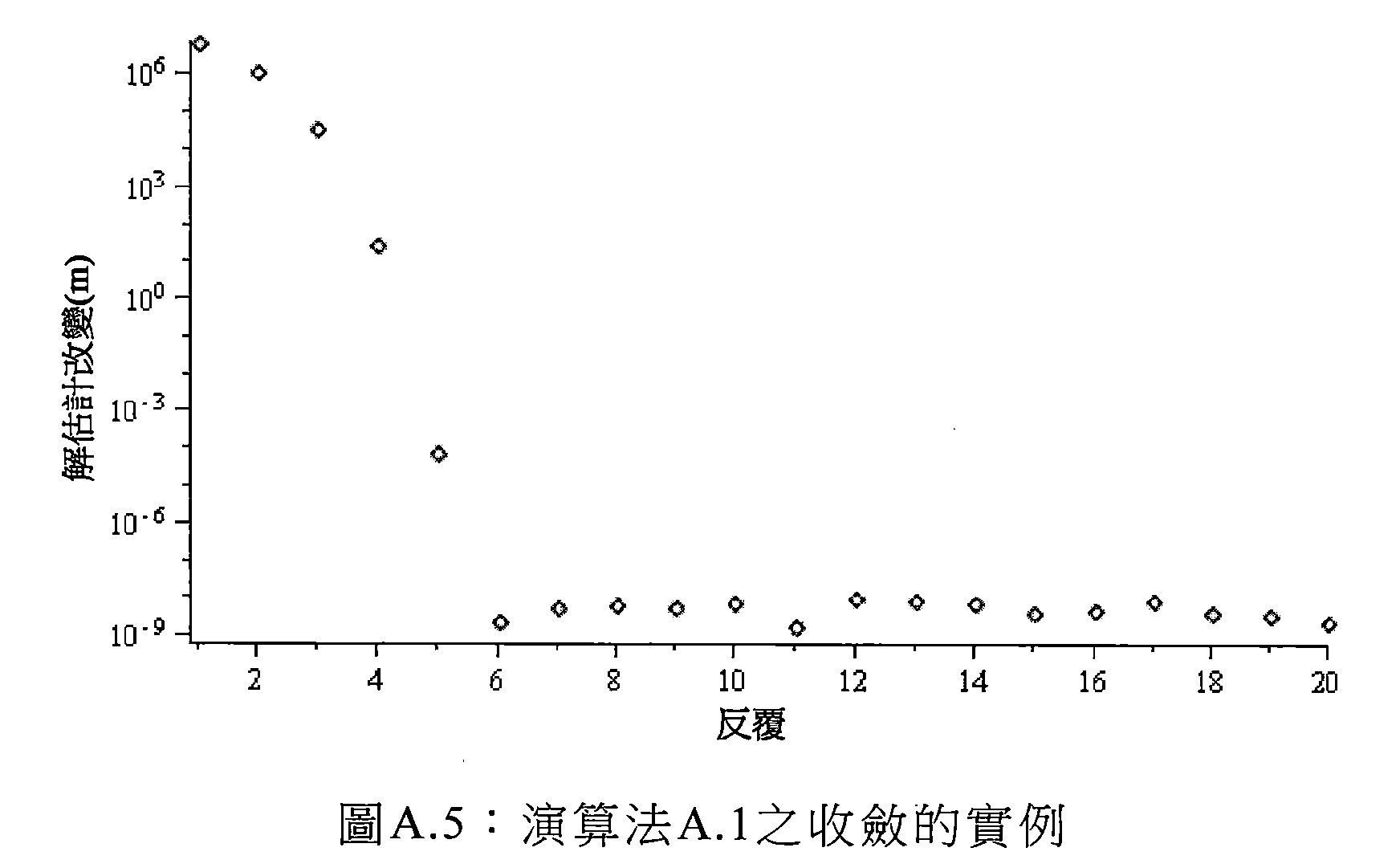
圖A.5中之實例的此演算法的輸出產生-116.644μs之接收器時脈偏差估計。此與如由接收器自身計算的-116.738μs之估計比較,兩者之間具有32m之空間解差異。
A.4.1.2 最終代碼可觀測量模型
為何在吾人之解與如由GPS接收器自身計算的解之間存在32m之差異的一個原因係吾人已在方程式A.16的吾人之模型中忽略一些事物。方程式A.16中之模型可藉由添加
對流層延遲T、電離層延遲I、多路徑M r 及雜項誤差e r而延伸。因此,可書寫相位可觀測量之更確切模型,如在以下方程式中。
p=ρ+c(△T RX -△T TX )+T+I+M r +e r (A.22)
在誤差源之中,電離層通常係最大的。電離層在地球上方50km延伸至1000km,其主要由帶電粒子、帶電原子及帶電分子組成。大部分電離係由來自太陽之紫外線(UV)射線所引起且因此總電子計數(TEC)存在大的日改變,此改變又影響電離層校正項I。電離層可產生少至1m至高達100m之衛星距離誤差[13]。電離層校正項係頻率相依的且在雙頻帶接收器的情況下,可觀測量之電離層自由組合係可能的。對於單頻帶接收器,可能無此組合,實際上Klobuchar電離層模型用於單頻帶接收器GPS。Klobuchar係數係在導航訊息中傳輸,使得接收器接著可估計電離層校正項。Klobuchar演算法校正約50%之電離層誤差[40]。
此章節中對於吾人而言重要事物係吾人能夠獲得近似解、具有小於100m之某種準確度之空間分量,及某種小於1ps之時間準確度。關於代碼可觀測量,以上係吾人所關注的全部。
A.4.2 相位可觀測量
相位可觀測量為由GPS接收器在特定時間內針對特定衛星所採取的量測之量。與僅使用代碼可觀測量進行量測之準確度相比較,相位可觀測量允許進行更高準確度GPS量測。此係歸因於與代碼可觀測量之碼片長度相比較的
GPS載波之短得多的波長。與C/A信號之碼片之大約300m長度相比較,L1之波長大約為20cm且可引起準確度之對應大的增加。量測來自監測接收之衛星載波與GPS接收器上之參考振盪器之間的相位差。接收器藉由追蹤而累積此瞬時相位差並將此作為相位可觀測量輸出至使用者。圖A.6展示在忽略在載波上發送的全部信號(諸如C/A、導航及P(Y)碼)的情況下在觀測衛星時GPS接收器正對於相位可觀測量進行什麼之方塊圖。

對於GPS,為了使GPS起作用,相位習慣以循環為單位而非弧度或度。相位為接收循環單位之三角函數內部之自變數。Φ S 為衛星之載波的相位,而Φ U 為接收器之參考相位。Φ S 及Φ U 兩者可變得任意大。
相位之累積中固有的係取決於你開始累積相位之時的模糊度N。除了模糊度以外亦存在遺漏一些旋轉之可能性。計數汽車輪胎旋轉之次數取決於你開始計數其旋轉之
時且亦取決於你是否遺漏任何旋轉。雖然GPS接收器設法連續地追蹤相位,但此未必總是可能的。歸因於雜訊、信號之損失或關斷GPS接收器及再次接通GPS接收器,相位之追蹤可丟失,從而引起N值的整數改變。此產生所謂的「循環滑移」。因此,理想地,此相位模糊度在衛星被追蹤的同時應為固定的,但歸因於循環滑移其偶爾地將改變。
如吾人已看到,衛星不會發送出連續波,該等波係以兩個BPSK信號於一調變,一個信號在正交相位中且另一信號在同相中。碼追蹤具有自BPSK信號中之一者抹除C/A代碼的效應,但當設法追蹤其時仍使導航添加複雜度之位準。當BPSK資料不用以再生原始載波時,載波相位中之半循環模糊度被引入至相位可觀測量中且據說相位可觀測量具有為2之代碼因數C f =2。當BPSK資料用以再生原始載波時,原始載波可運用一個循環之模糊度完全再生且據說相位可觀測量具有為2之代碼因數C f =1。因此,當使用為1之代碼因數時可縮減相位可觀測量之模糊度。
A.4.2.1 最終相位可觀測量模型
如吾人已看到,追蹤載波相位會最大化γ,其又意謂在追蹤的同時累積之相位在使用科斯塔斯PLL時對於某一固定整數N為 。當考慮代碼因數時,相位可被書寫如下。
。當考慮代碼因數時,相位可被書寫如下。

假定接收器之時脈係基於其本地振盪器且其頻率保持完美的時間,則真實GPS時間可經轉換為如由接收器判定
為 的時間。按照定義,真實時間加時脈偏差亦為如由接收器所判定的時間T RX =t+△T RX 。依據真實GPS時間使兩式相等且重排會得到時脈偏差。同樣地,可對於衛星之時脈進行此操作。
的時間。按照定義,真實時間加時脈偏差亦為如由接收器所判定的時間T RX =t+△T RX 。依據真實GPS時間使兩式相等且重排會得到時脈偏差。同樣地,可對於衛星之時脈進行此操作。


使兩式相減且乘以f 0會產生下式。

在使此式與方程式A.23相等的情況下,吾人看到,吾人可將方程式A.23書寫如下

f TX 為GPS傳輸器之振盪器且為極接近於f 0之原子時脈。因此,出於吾人之目的,f TX /f 0=1,且吾人可將方程式A.27重寫如下。
Φ=f 0(△T RX -△T TX )+ρ/λ0+N/C f (A.28)
方程式A.28中之此模型可藉由如運用代碼可觀測量進行的添加對流層延遲T、電離層延遲I、多路徑 及雜項誤差
及雜項誤差 而延伸。然而,用於相位之電離層校正雖然與代碼可觀測量之電離層校正的量值相同,但具有相反正負號。因此,可書寫相位可觀測量之更確切模型,如在以下方程式中。
而延伸。然而,用於相位之電離層校正雖然與代碼可觀測量之電離層校正的量值相同,但具有相反正負號。因此,可書寫相位可觀測量之更確切模型,如在以下方程式中。

方程式A.29中之距離項p係針對在接收時間t RX 處之接收器及在傳輸時間t TX 處之衛星。因此,因為t TX 為比t RX 之當前時間早的時間,所以距離ρ為你所在之處至在短時間段之前衛星所在之處的量度;此等兩個值之間的差通常為約60ms標記且衛星可在此時間中移動幾百公尺。
相位可觀測量係在GPS時間t RX 量測,此變數自身必須被求解,此係因為你不確切地知曉進行量測在什麼時間;你知曉你現在進行量測,但你不知曉現在為何時。此可使用如前所示之代碼可觀測量而獲得。
接收器之時脈偏差係在t RX ,而衛星之時脈偏差係在t TX ,但此等並不如此關鍵,此係因為此等不在60ms內快速改變且可安全地假定為在短時間段內恆定。
方程式A.29為用於相位可觀測量之吾人之最終模型。左側為接收器給予吾人之物,而右側為吾人將其解譯為之物。將其乘以衛星之標稱波長仍分類為單差,而非相位可觀測量之循環的單位,相位可觀測量單位變成公尺。
A.5 選定證明
A.5.1 使用飛行時間近似之經接收相位
飛行時間之泰勒展開式

一階線性近似

定義經接收相位

A.5.2τ 一階線性近似
A.5.3 具有恆定徑向速度偏移
 之徑向速度
之徑向速度
恆定速度偏移發生了什麼。
若徑向速度一直超出 ,則
,則

其中θ'(t m )及δ為一些常數
A.5.4 衛星相對於接收器之最大徑向速度及加速度
圖A.7為衛星在傳輸至接收器的同時圍繞地球運行的簡化模型。不考慮相對論效應且假定衛星之軌道極佳地為具有恆定切向速度之圓形且當衛星最接近接收器時衛星直接在頭頂。

自圖A.7吾人獲得描述系統之以下方程式。
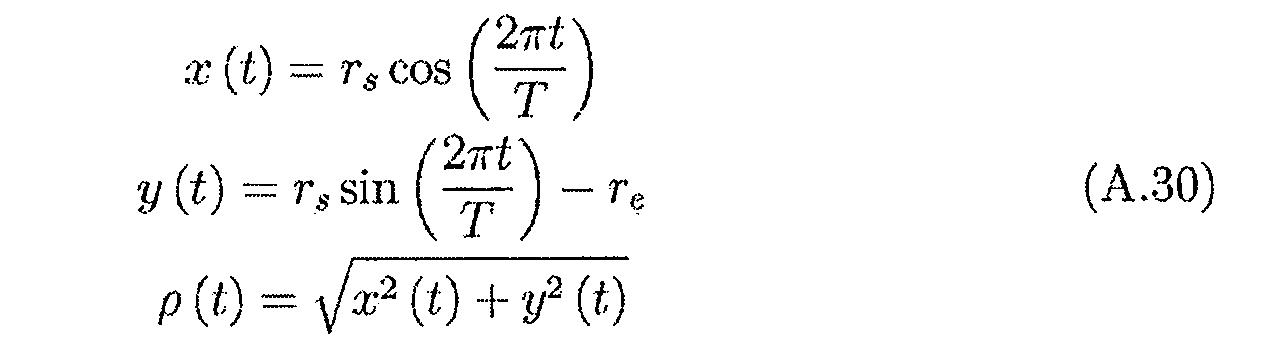
使用以下近似值,近似值為GPS衛星軌道週期T、地球之半徑及GPS衛星軌道之半徑的大體上認可之值。藉由區分距離方程式A.30,獲得圖A.8。
T e =6371000m T s =26600000m T=43080s (A.31)

自模型導出的最大徑向速度在衛星上升時間及設定時間為929ms -1 。最大加速度為0.1178ms -2 且係在衛星直接在頭頂之時。[57](第91頁)陳述GPS衛星可具有相對於地球上之靜止接收器的高達800ms -1 之徑向速度。此與吾人之簡化模型一致。在L1頻帶上,0.1178ms -2 之加速度大約為0.9Hzs -1都卜勒頻移率,而L1頻帶上之929ms -1 大約為5kHz都卜勒頻移,因此f 0 ±5kHz必須經搜尋用於載波頻率。
差分化相位可觀測量
使用多個相位觀測並採取其之差會產生可用於得知方位解的各種差。在此附錄中吾人查看此等差及方位解採用的何種形式。
B.1 單差
單差為兩個不同GPS接收器(兩個不同使用者)在同一曆元處的兩個相位可觀測量之間的差。進行單差消除在觀測一個衛星時之系統誤差。此等誤差包括衛星時脈偏差及在很大程度上大氣壓誤差。
吾人現在使用兩個GPS接收器A及B以觀測衛星S。相位可觀測量係在大約相同時間藉由兩個接收器量測。使用者A報告如由接收器自身上之系統時脈報告的時間T A ,而使用者B報告在採取其量測時其GPS接收器上之時脈為T B。實際GPS時間與根據接收器自身上之時脈的時間之間的關係如下。
t A =T A -△T A (B.1)
t B =T B -△T B (B.2)
在使用虛擬距離可觀測量的情況下,可獲得接收器時脈偏差△T a 及△TB。小於1ps的時脈偏差之良好估計被假定為今後給出。
兩個可觀測量模型可被書寫如下,其中應理解,多路徑誤差及雜項誤差指代相位可觀測量而非代碼。

其中△T S 為衛星之時脈偏差,T為對流層校正,I為電離層校正,C f 為代碼因數, 及
及 為整數模糊度。
為整數模糊度。 及
及 為多路徑校正,
為多路徑校正, 及
及 為雜項誤差,c為光速,
為雜項誤差,c為光速, (t B )及
(t B )及 (t A )為接收器至衛星距離,
(t A )為接收器至衛星距離, (t B )及
(t B )及 (t A )為接收器相位量測,且λ為衛星之標稱波長。Φ上之下標指示哪一接收器已進行量測且上標指示至哪一衛星。
(t A )為接收器相位量測,且λ為衛星之標稱波長。Φ上之下標指示哪一接收器已進行量測且上標指示至哪一衛星。 (t)為自在傳輸時間之衛星S至在接收時間t處之接收器A的距離。
(t)為自在傳輸時間之衛星S至在接收時間t處之接收器A的距離。 指示未知整數N係針對監測衛星S之接收器A。
指示未知整數N係針對監測衛星S之接收器A。 為影響自衛星S至接收器A之信號的相位多路徑,且
為影響自衛星S至接收器A之信號的相位多路徑,且 為影響接收器對於衛星S之量測的相位可觀測量之雜項誤差,其未被模型化。此等兩個相位觀測(λ
為影響接收器對於衛星S之量測的相位可觀測量之雜項誤差,其未被模型化。此等兩個相位觀測(λ 及λ
及λ )係藉由乘以衛星之標稱波長以公尺而非循環為單位給出。
)係藉由乘以衛星之標稱波長以公尺而非循環為單位給出。
雖然對流層校正及電離層校正對於兩個接收器不完全地相同,但吾人假定其係完全地相同。亦因為量測並非完全同時進行,所以衛星時脈偏差在兩個接收器採取量測時將係不同的,但此處吾人假定衛星時脈偏差△T S 對於兩個接收器係相同的。
因為觀測並非同時,所以兩個使用者在不同地點看到衛星;下圖描述該情形。
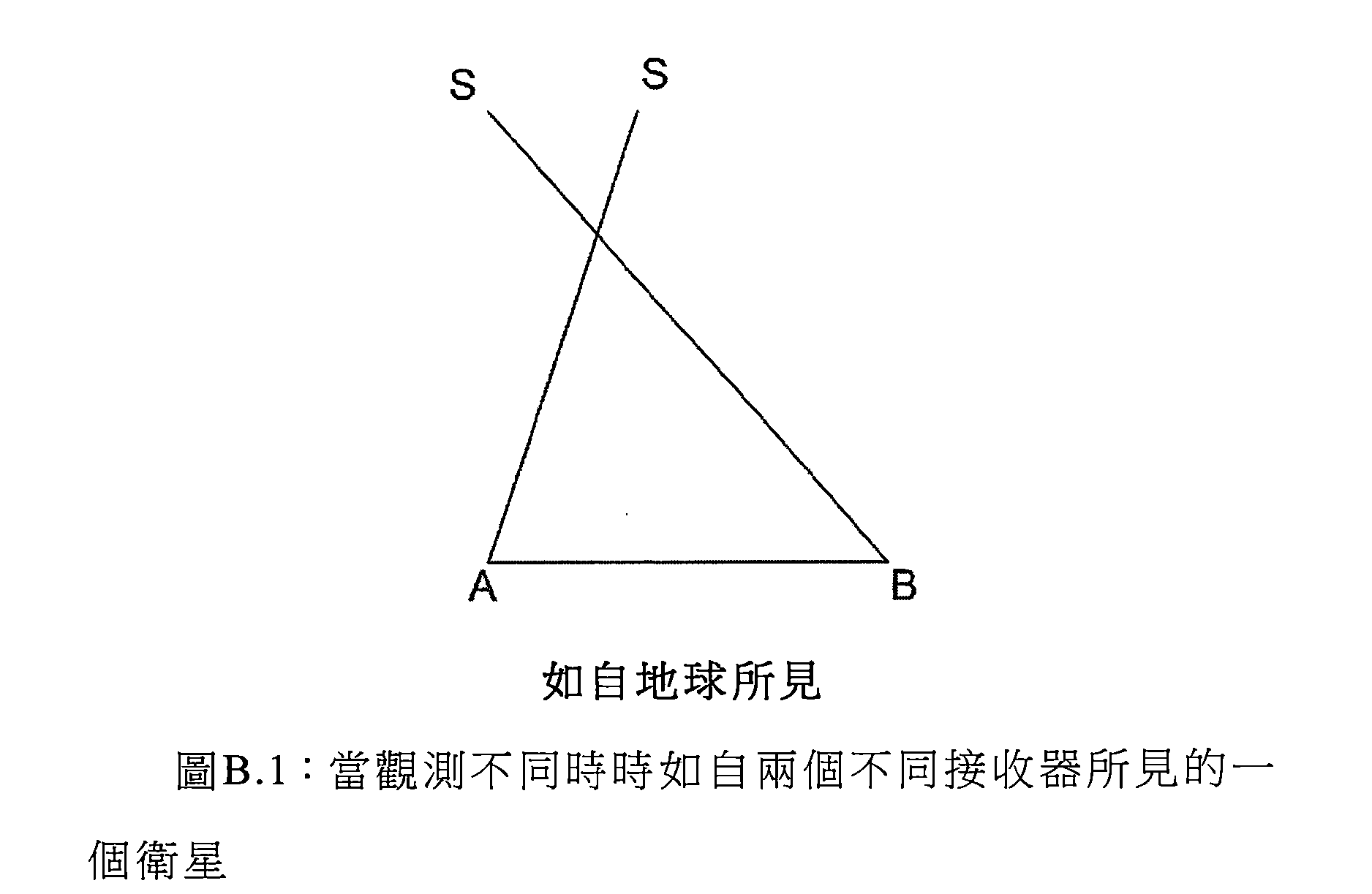
吾人因此外推第二t上之共同曆元。吾人現在必須調整相位可觀測量如同吾人實際上在此共同曆元處採取量測。為了做到這一點,吾人可在兩個距離項上使用使用泰勒展開式的一階近似並重排其得到下式。




在將此回代至方程式B.3中之可觀測量模型中的情況下,吾人得到下式。

距離變化率 可藉由使用近似接收器之方位及使用
導航資料,或藉由量測多普勒而計算。為了使用接收器之近似方位來得知距離變化率,使用鏈式規則求
可藉由使用近似接收器之方位及使用
導航資料,或藉由量測多普勒而計算。為了使用接收器之近似方位來得知距離變化率,使用鏈式規則求 (t)微分會得到下式(參見B.4.1)。
(t)微分會得到下式(參見B.4.1)。

若吾人假定接收器大體上靜止且距離變化率比光速小得多,則吾人獲得下式。

如吾人已看到的最大距離變化率小於800ms -1 ,其比光速小得多,因此其為有效假定。通常,t-t B 將比1ms小得多,1ms將在方程式B.5中產生小於10μm之校正誤差,其為可接受的誤差。
方程式B.5的左側之項係全部可獲得的。Φ為在吾人已選擇的共同曆元t之經量測相位可觀測量,量測之實際時間t B 係已知的且吾人亦可估計距離變化率。左側為相位可觀測量之校正版本以考量相位可觀測量並非同時採取的事實。吾人因此將給定之相位可觀測量重寫如下。
Φ符號之頂部上的上標三角將展示吾人此時並未量測相位,而實際上其為其在彼時的估計。比如t與t A 之間的時差很可能小於一毫秒,一毫秒對於吾人此處談論之時間係相對短的時間段且因此為可接受之近似值。在將方程式B.8代入至方程式B.3中後,吾人就得到外推至共同曆元t之以下相位可觀測量。

在採取方程式B.9中之兩個可觀測量之間的差的情況
下,吾人得到下式,其中 ,
,
 ,
, ,
, 且
且 。
。

此單差具有移除兩個接收器共同之誤差的效應。此等誤差包括大氣壓誤差及與衛星自身相關的誤差。假定兩個接收器足夠接近,使得大氣條件對於兩個使用者相同且此等兩個觀測之間的時間儘可能地小。然而,亦不考量多路徑及雜項誤差(諸如雜訊)。
B.1.1單差解譯
吾人現在進行如下近似:與兩個接收器彼此相距距離相比較,衛星距接收器距離要遠得多。此意謂衛星幾乎在距接收器無限遠處出現,此意謂角度SAB等於角度ABS,如下圖所描繪。
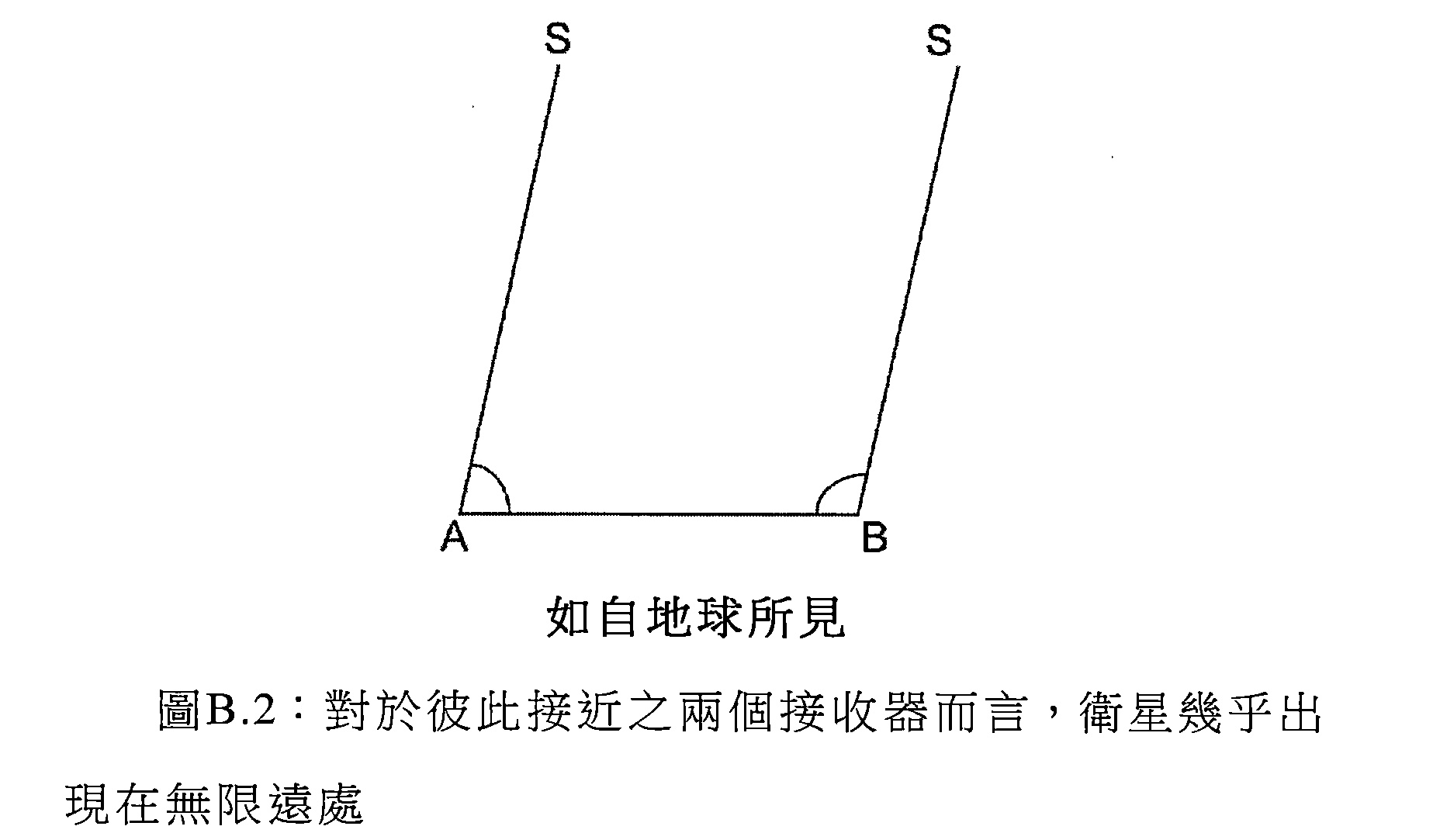
GPS衛星至少約20,000km遠,因此對於幾十公里之任何基線,此係有效的假定。
此意謂對於兩個接收器存在指向衛星之共同向量。吾人稱此為單位法向量 。以下為描繪當前情形之圖。吾人可看到,在兩個接收器之間存在一向量,吾人現在稱該向量為方位向量P=B-A且吾人亦能夠可視化在方程式B.10之右側的距離差項。
。以下為描繪當前情形之圖。吾人可看到,在兩個接收器之間存在一向量,吾人現在稱該向量為方位向量P=B-A且吾人亦能夠可視化在方程式B.10之右側的距離差項。

在採取方位向量(位移向量)與單位法向量之點積的情況下,吾人可將距離差項重寫如下。

此允許吾人將方程式B.10重寫如下。

方位向量為吾人想要求解之物。方位向量告知使用者B之方位如何與使用者A相關。
在使用代碼可觀測量的情況下,可獲得基於自主代碼之解,其亦由接收器時脈偏差組成。然而,與基於自主代碼之解自身相比較,此等不足夠準確以允許使用方程式B.12進行方位準確度之改良。為經設計用於精確度時序應用的單頻帶接收器之Ublox LEA-6T主張「高達15ns之準確度」[15],其等於在方程式B.12中引入約4.5m之誤差。此
給予吾人用於進行雙差的動機,雙差消除進行同時觀測的接收器自身之系統誤差
B.2 雙差
雙差為單差之差。當進行同時觀測時,雙差消除接收器自身之系統誤差。此等誤差包括接收器時脈偏差。
吾人仍使用接收器A及B採取兩個衛星S2及S1之兩個單差。吾人亦需要同時採取此等單差。當GPS使用CDMA時此同時性係可能的,此意謂GPS接收器同時看到天空中之每一衛星。方程式B.13展示單差對。

在採取兩式之差的情況下,吾人得到下式,其中
 ,
, ,
, ,
,
 及
及 。
。

相位多路徑可高達觀測的四分之一循環且並不自一個位點至另一位點很好相關[28],因此雙差中之多路徑分量可高達一個循環。雜項誤差分量取決於許多事物,但若吾人假定其僅歸因於準確量測相位之能力且吾人假定吾人可量測相位為循環之1%,則吾人將預期雜項誤差分量為循環之4%。實際上由此,多路徑可在使用雙差時為定位誤差之主要源。
B.2.1雙差解譯
△nS2S1被吾人稱為差量範數,而散佈著方位向量之任何向量被稱為方向向量。差量範數因此亦為方向向量。吾人注意到,用於雙差之方向向量不再為單位向量。此之解譯可運用以下圖來可視化。

出於簡潔起見,使
 且將其稱為經校正
量測,雙差可使用方程式B.14中之吾人之模型而模型化如下。
且將其稱為經校正
量測,雙差可使用方程式B.14中之吾人之模型而模型化如下。
P為吾人希望求解的未知數,因此吾人將其視為變數。作為變數,存在滿足方程式B.15的P之許多值,不僅僅係吾人尋找的P=B-A,因此吾人現在可不再說P=B-A。吾人現在尋找方程式B.15之解採用的何種形式,因此得知吾
人之雙差模型的解。當吾人知曉 滿足方程式B.15且為實際答案時使方程式B.15相等,在一般狀況下,當P滿足方程式B.21但無需等於
滿足方程式B.15且為實際答案時使方程式B.15相等,在一般狀況下,當P滿足方程式B.21但無需等於 時吾人獲得下式
時吾人獲得下式

在重排後,吾人就看到

若吾人將P及 視為點向量,則此具有平面之形式。
視為點向量,則此具有平面之形式。 向量之末端為此平面上之點且該平面垂直於差量範數。可在下圖中可視化上述情形。
向量之末端為此平面上之點且該平面垂直於差量範數。可在下圖中可視化上述情形。

此意謂方程式B.14之解形成位於接收器B上之平面。吾人說此平面為雙差之解平面。
B.2.2雙差循環滑移
理想地,方程式B.14中之雙差中的整數 將為常數,但如吾人在188頁上之子章節A.4.2中已提及,GPS接收器可失鎖,從而造成所謂的循環滑移。圖B.6展示此等循環滑移如何影響雙差之實例。
將為常數,但如吾人在188頁上之子章節A.4.2中已提及,GPS接收器可失鎖,從而造成所謂的循環滑移。圖B.6展示此等循環滑移如何影響雙差之實例。

如可看到,半循環及全循環模糊度兩者已被偵測,因此,接收器(Ublox LEA-6T)在此繪圖產生時並不使用導航資料來重新建構載波。在此狀況下,自繪圖易於看到循環滑移出現之處及校正其所需要之物,但此未必總是如此,尤其是在接收器廣泛地分離時。各種方式已經設計以偵測及/或校正雙差循環滑移。未校正及/或未偵測之循環滑移嚴重影響方位解準確度[46]。
B.2.3雙差殘餘
雙差殘餘(或簡言之,殘餘)為所量測之雙差與在給出方位P的情況下所預期之雙差之間的差;在循環中殘餘被書寫如下。

作為獲得如何校正解或多少誤差在雙差中之想法的方式,殘餘係有用的。
B.3 包裝雙差
吾人針對關於衛星S1及S2以及接收器A及B的雙差之正分數分量定義以下記號,並將其稱為包裝雙差,其中{}為鋸齒形函數。

在使此與吾人之雙差模型相等的情況下,吾人看到下式。

此為用於包裝雙差之吾人之模型。包裝雙差移除未知整數N,從而移除循環滑移。
B.3.1包裝雙差解譯
包裝雙差藉由包裝雙差而移除未知整數N。當相對於時間標繪來自一對衛星的包裝雙差時,吾人得到看起來類似於以下圖之某圖。資料似乎被包裝,因此其得名。

圖B.7:使用隔開幾公分之兩個GPS接收器針對一對衛星之包裝雙差資料。
圖B.7係針對相隔僅僅幾個公分置放的兩個接收器對於在大於此之距離處的接收器,當標繪包裝雙差時吾人得到的繪圖視覺上變得無意義且看起來像除了均質點塊以外什麼都沒有。
出於簡潔起見,使 並將其稱為經校正包裝量測,接著用於包裝雙差的吾人之模型可被書寫如下。
並將其稱為經校正包裝量測,接著用於包裝雙差的吾人之模型可被書寫如下。

可以類似於針對子章節B.2.1中之雙差模型進行的的方式得知對於包裝雙差的吾人之模型的解之形式。吾人尋找方程式B.21之解採取的何種形式。當吾人知曉
 滿足方程式B.21且為實際答案時使方程式
B.21相等,在一般狀況下,當P滿足方程式B.21但無需等於
滿足方程式B.21且為實際答案時使方程式
B.21相等,在一般狀況下,當P滿足方程式B.21但無需等於 時吾人獲得下式。
時吾人獲得下式。
採取兩式之差。

此類似於針對雙差之解採取的形式,惟此次歸因於鋸齒形函數而存在無限數目個平面除外。為除移除鋸齒形函數,吾人注意到,存在k  Z,使得
Z,使得

此意謂

此可被重寫如下,其中μ S2S1=λ/(C f ∥△n S2S1∥)。

因此,解形成平面無限集。一個平面與用於雙差之解平面相同,且其他平面平行於此平面,其中每一平面彼此之間具有μ S2S1 公尺之固定間隔。因此吾人將μ S2S1 稱為平面間隔。下圖可視化無限解平面集合中之三個平面。

B.3.2包裝相位可觀測量
吾人將包裝相位可觀測量定義如下。

可將此如下使用方程式B.8外推至共同曆元t。

在給出兩個接收器A及B的情況下,接著可形成單差,吾人將包裝單差稱為 (t)。
(t)。

且最終將兩個包裝單差給予兩個不同衛星S1及S2,可形成包裝雙差。

因此,在給出包裝相位可觀測量的情況下,有可能形成外推至共同曆元之包裝雙差。其以此方式進行的優點在於,與給定準確度之正常相位可觀測量相比較,需要較少位元來表示包裝相位可觀測量;此節省網路頻寬。
歸因於鋸齒形函數之屬性,當自四個包裝觀測建立包裝雙差時,僅需要一個鋸齒形操作;此可被書寫如下。

B.3.3解開包裝雙差
解開為一種自包裝雙差重新建立雙差之方法。
首先,吾人將鋸齒形差函數定義如下。
f(x)={x+0.5}-0.5 (B.32)
此處,吾人定義進行解開並用於CFF演算法的演算法。α  [0,1]並判定演算法對於輸入之突然改變多麼敏感。
[0,1]並判定演算法對於輸入之突然改變多麼敏感。

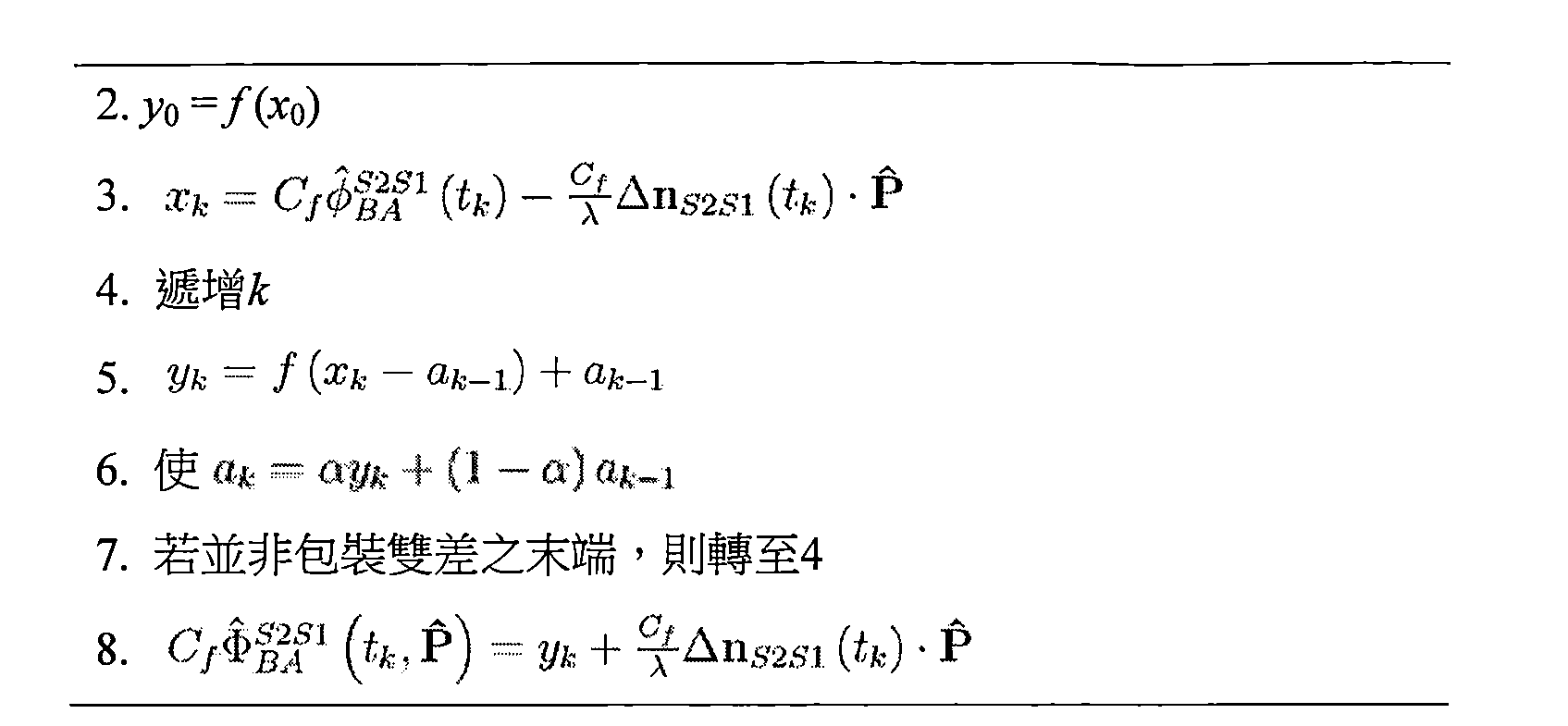
此解開演算法需要近似方位估計 作為輸入。此係因為一對衛星的雙差之相位可相對於時間非常快速地改變,使用方位估計實際上減緩包裝效應,以便增加解開演算法將成功且不引入循環滑移的可能性。下圖展示針對在進行解開之前及之後的殘餘運用不同於實際半公尺之方位估計對一對衛星進行的此演算法之實例。
作為輸入。此係因為一對衛星的雙差之相位可相對於時間非常快速地改變,使用方位估計實際上減緩包裝效應,以便增加解開演算法將成功且不引入循環滑移的可能性。下圖展示針對在進行解開之前及之後的殘餘運用不同於實際半公尺之方位估計對一對衛星進行的此演算法之實例。
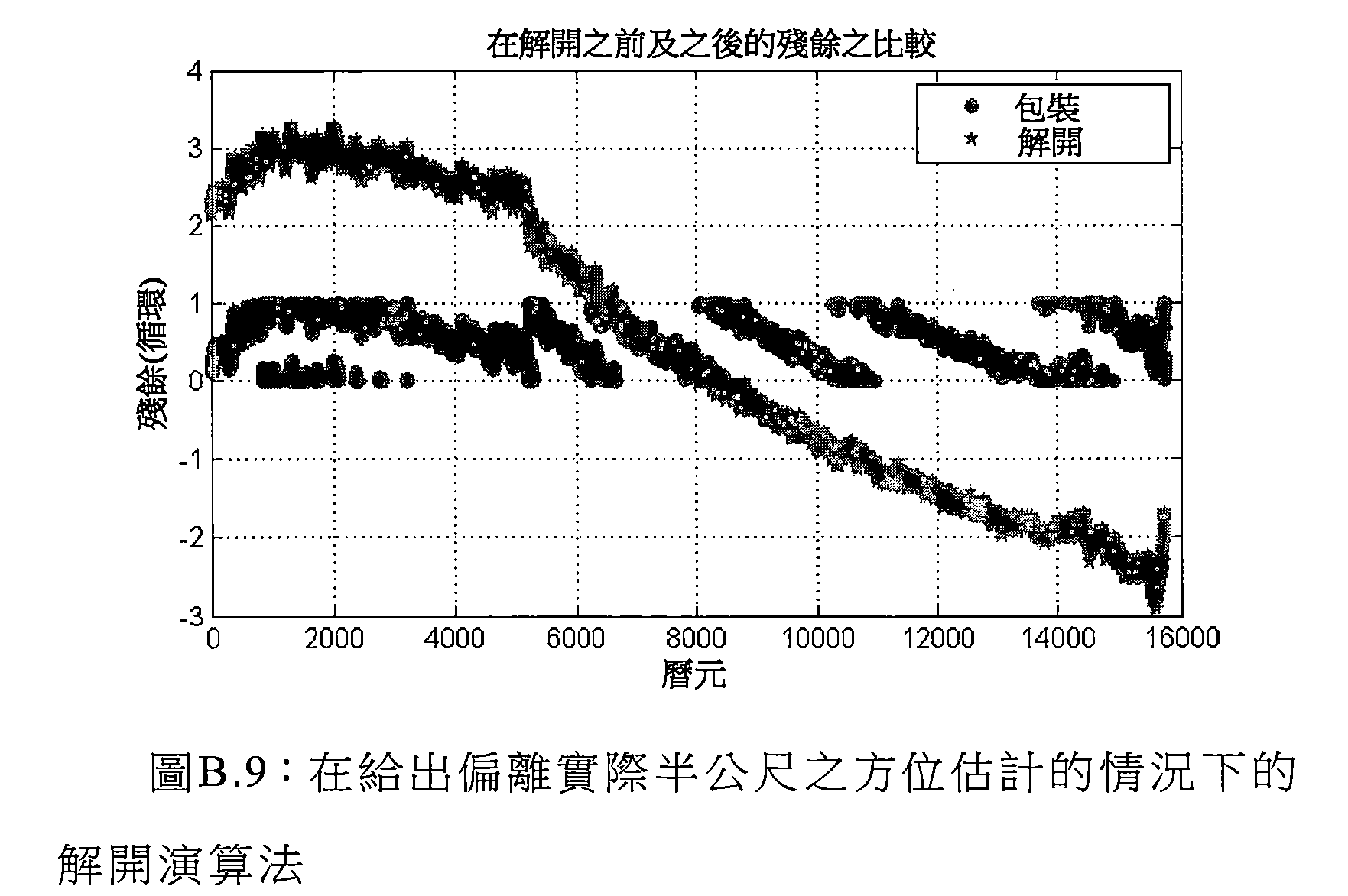
解開演算法可藉由引入循環滑移而出錯,特別是當資料為間歇(對於吾人之情境常常係此狀況)時。然而,如吾人應看到,解開演算法對於靜態情境(諸如吾人之情境)出
人意料很好地進行。
B.3.4包裝雙差殘餘
包裝雙差殘餘(或簡稱為包裝殘餘)為所量測的包裝或解開雙差與在給出方位P的情況下預期的雙差之間的鋸齒形差;以循環為單位,其被書寫如下。

與雙差殘餘對比,包裝殘餘係循環滑移不變的。類似於雙差殘餘之包裝殘餘表達所量測物與所預期物之間的誤差。
B.4 選定證明
B.4.1距離變化率計算
在給出 的情況下,接著針對2D求導。
的情況下,接著針對2D求導。

對於3D,展開式係明顯的,並得到相同公式。
在夜晚之節點功能性
作為概念證明,除了使用將時序、位置及星曆導入至GPS接收器中的輔助全球定位系統(AGPS)系統以外,吾人亦設計及實施基於晝夜節律之能量分佈演算法。33F電容器用於此測試。
C.1 輔助GPS
為了擴展在夜晚使用諸如33F電容器之極小能量儲存裝置相當均一地獲得的觀測,需要具有極低導通時間之極低工作循環([44]之第5章);此促動吾人設計AGPS系統。AGPS系統經由替代鏈路而非來自衛星之通常50波特通訊通道來將星曆、曆書及近似時間及方位供應至GPS模組。此允許GPS接收器節省不必收聽衛星的時間以恰好獲得星曆及曆書資料。
輔助GPS之吾人之實施方案包含自由Ublox提供之Assistnow伺服器獲得星曆、曆書及近似時間。此資料保存在本地PC上並週期性地與Assistnow伺服器同步。此PC以大約250kb/s之速率在具有相異個人區域網路(PAN)識別(ID)的專用通道(AGPS通道)上使用802.15.4無線電連續地發送出此資料。具有不同PAN ID之另一通道(主通道)用於自GPS節點擷取資料並將其發送回至個人電腦(PC)。圖C.1展示此通訊實施方案。

對於主通道,歸因於來自AGPS通道之串擾,需要確認以避免在主通道上之封包丟失。
在任何特定時間之輔助GPS資料的量並不恆定,而是約3kB量。GPS接收器可在約300ms內運用GPS資料初始化,此類似於直接自衛星下載此資料之約15分鐘。
在晴朗的天空情況下,在運用或不運用輔助GPS資料的吾人之實施方案的情況下,在沒有被供應至GPS接收器之後備功率的情況下,吾人進行10次試驗。對於每一試驗記錄TTFF且結果在下圖中標繪。
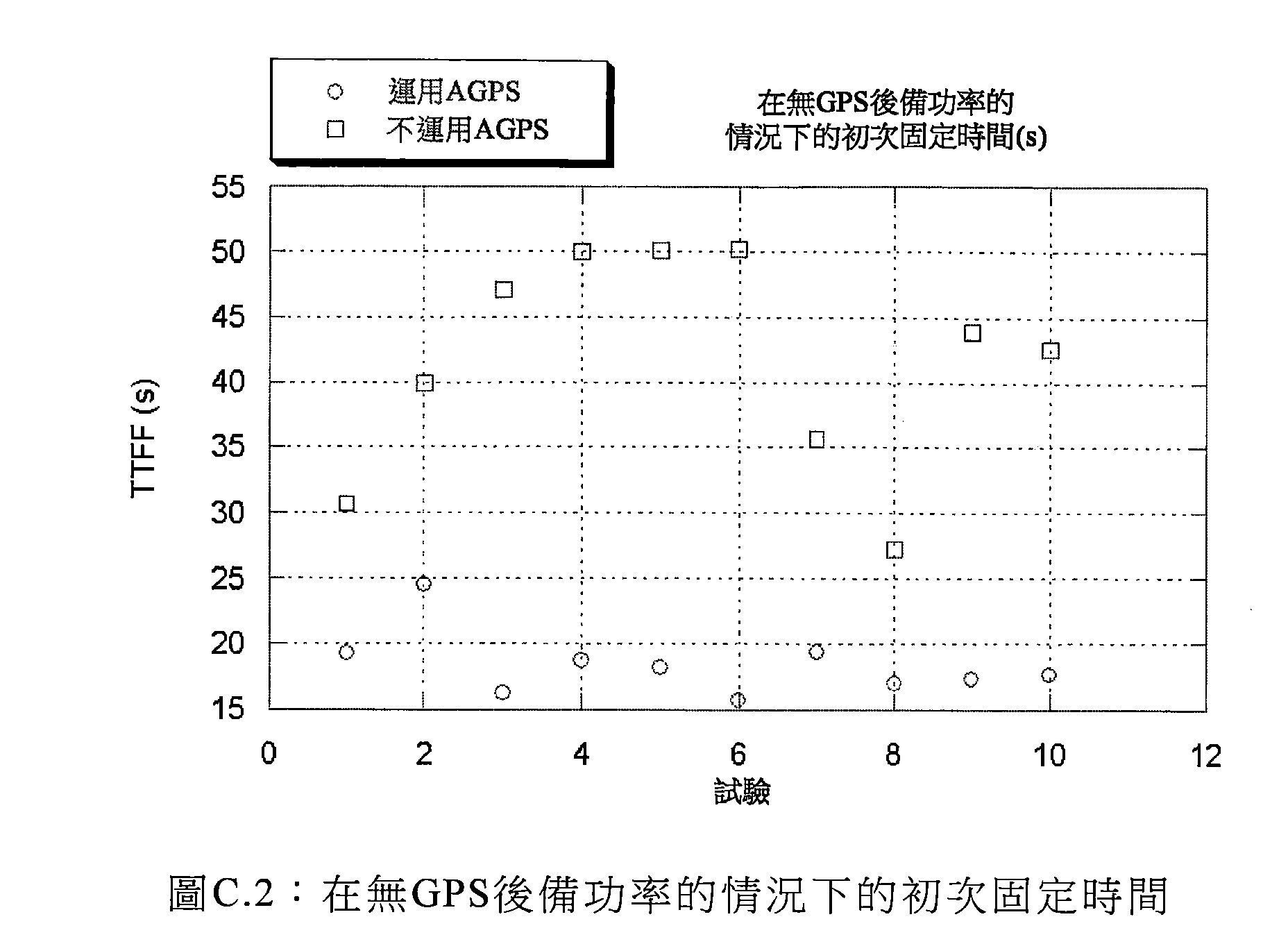
如可看到,使用AGPS系統時之TTFF顯著低於不使用AGPS系統時的TTFF。與使用AGPS系統時之18秒相比較,不使用AGPS時之平均時間為42秒。接著,根據量測使用大約30μW向GPS接收器供應後備功率的情況下,再次進行此TTFF測試;在每一試驗之間使用60秒之週期。結果在下圖中描繪。

初次GPS試驗TTFF比剩餘試驗大得多的原因係歸因於以下事實:GPS後備功率直至彼試驗才給予電力。排除初次試驗,與不使用吾人之AGPS實施方案時之10秒相比較,吾人之AGPS實施方案產生4秒之TTFF。
運用及不運用GPS後備功率的情況下,TTFF在兩種狀況下皆為大約一半。
試驗之間的時間段在使用GPS後備功率時係重要的,此係因為在施加後備功率時GPS接收器保持的任何資訊將老化;在足夠長時間段情況下,其保持的任何資訊將變得無用。舉例而言,除了四個小時老化以外通常並不使用星曆。因此,當使用AGPS並供應GPS後備功率時進行30分鐘之較長間隔。採取此類型之七個依序試驗且結果在下圖中標繪。

排除初次試驗的情況下,此測試平均TTFF為5秒。此展示高達30分鐘之節點非作用中狀態時段在使用AGPS及GPS後備功率的情況下最低限度地影響TTFF。
在夜晚之工作循環可被計算如下

如可看到,工作循環隨夜晚長度而變。因此,假定夜晚長度為12小時,則吾人看到工作循環為大約0.5%,不必說此係極低工作循環。
接通時間之浪費百分比被給出如下,其中t on 為工作循環之每一作用中部分的接通時間。

而在整個夜晚期間作用中時段之數目被給出如下。

因此,吾人採取50%之接通時間的浪費百分比,此暗示在使用吾人之AGPS給出5秒之TTFF的情況下,10秒之接通時段。此又暗示在整個夜晚期間大約20個作用中時段。每一作用中時段持續10秒,且用於此等作用中時段中之每一者的此能量的一半歸因於初始化而浪費掉。雖然工作循環為0.5%,但此百分比之一半歸因於初始化而浪費,吾人預期僅僅夜晚之0.25%獲得觀測;吾人將此稱為有效工作循環。
C.2 晝夜節律能量分佈演算法
為了在夜晚進行量測,儲存於電容器上之能量必須在整個夜晚期間被分佈以進行此任務。除此之外,亦必須在整個夜晚期間有足夠能量保留以運行類似於微處理器之其他此等事物。為了允許此發生,吾人設計及實施基於晝夜節律之想法的能量分佈演算法。以下描述該演算法。
第一假定為始終可在一天的白天時間期間對電容器充滿電。若並非如此,則吾人說電容器對於太陽能面板太大或太陽能面板不夠大。必須對於每一太陽能面板及電容器組合檢查此假定。
第二假定為用以獲得觀測之全部時間段花費相同時間段及能量。此等時間段中之每一者稱為事件。
存在兩個事件類型,觸發及隔開。
觸發事件可在任何時間發生。當電容器之電壓超過2.2V之固定電壓時其發生。
另一類型之事件為隔開事件。此等事件如下圖中所描繪在最後觸發事件與第一觸發事件之間均勻隔開發生。

在隔開事件階段期間最後觸發事件與第一觸發事件之間的隔開事件之能量的總和大約等於電容器之可用能量。
在最後觸發事件之後的α/(n+1)發生第一隔開事件,且大約每隔α/(n+1)發生直至第一觸發事件。n為充滿電之電容器在未變平的情況下及在未得到任何新能量輸入的情況下可進行事件的次數,而α為在隔開事件階段期間最後觸發事件與第一觸發事件之間的時間段。
當節點開始進行隔開事件時,其將直至隔開事件中之至少第三事件出現才進行觸發事件。在隔開事件階段期間監測電壓不足且若遇到則將停止進行隔開事件。若電壓仍高於固定電壓(比如2.2V),則事件將延長。每當隔開事件發生時就更新事件之間隔。隔開事件之數目係藉由考量在事件之後的當前電容器電壓、每一隔開事件使用的能量之量及下一觸發事件可能要多久而計算。節點使即時日歷時脈(RTCC)一直保持作用中。RTCC並不在全球設定任何特定時間,其僅僅大約每隔24小時循環。其沒有必要知曉具體時間是什麼,但其有必要對地球繞其自身軸旋轉花費多久有想法。其進行與吾人之晝夜節律相同的功能。
C.3 晝夜節律能量分佈演算法及AGPS系統實施結果
接著,晝夜節律能量分佈演算法連同如所描述之AGPS系統一起實施於硬體上並被測試。以下描述自此系統獲得之結果。
在下午5:00,節點持續大約18小時置放在外部且記錄節點之超級電容器電壓;圖C.6展示此等量測之結果;如可看到,此圖表看起來類似於圖C.5中之圖表。
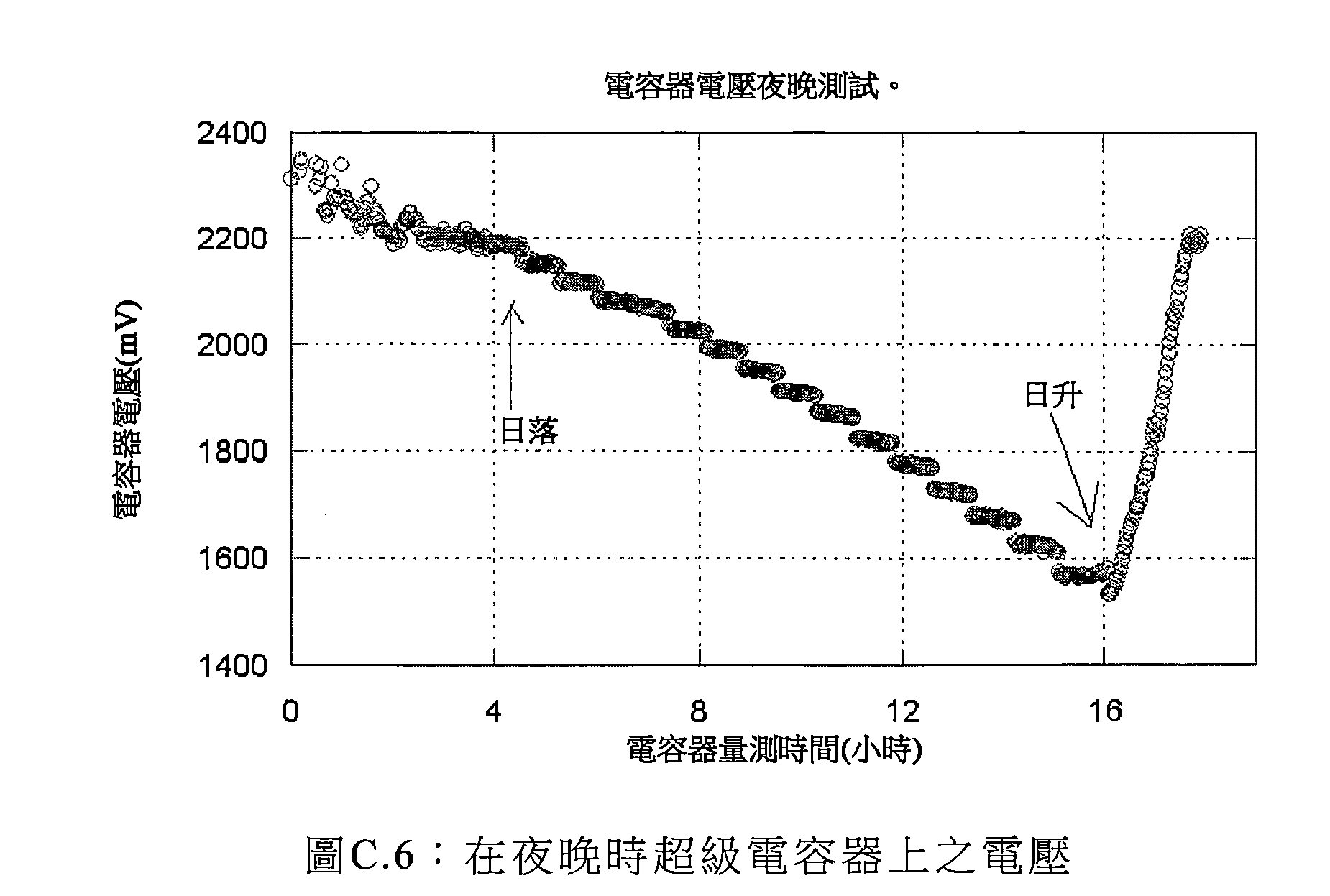
在圖C.6中可看到的在整個夜晚期間之短尖銳下降係由GPS進入作用中並採取量測所造成。在整個夜晚期間僅僅存在大約14個量測,而非較接近於如在最後觸發事件與第一觸發事件之間的整個時段期間所預期的20個量測的原因係因為節點晝夜節律直至完整24小時過去才同步。
持續大約75小時進行測試,記錄GPS模組之基於自主代碼之方位解,計算此資料集合之平均值且接著對於每一方位解,自此平均值之偏移被計算並標繪於圖C.7中。
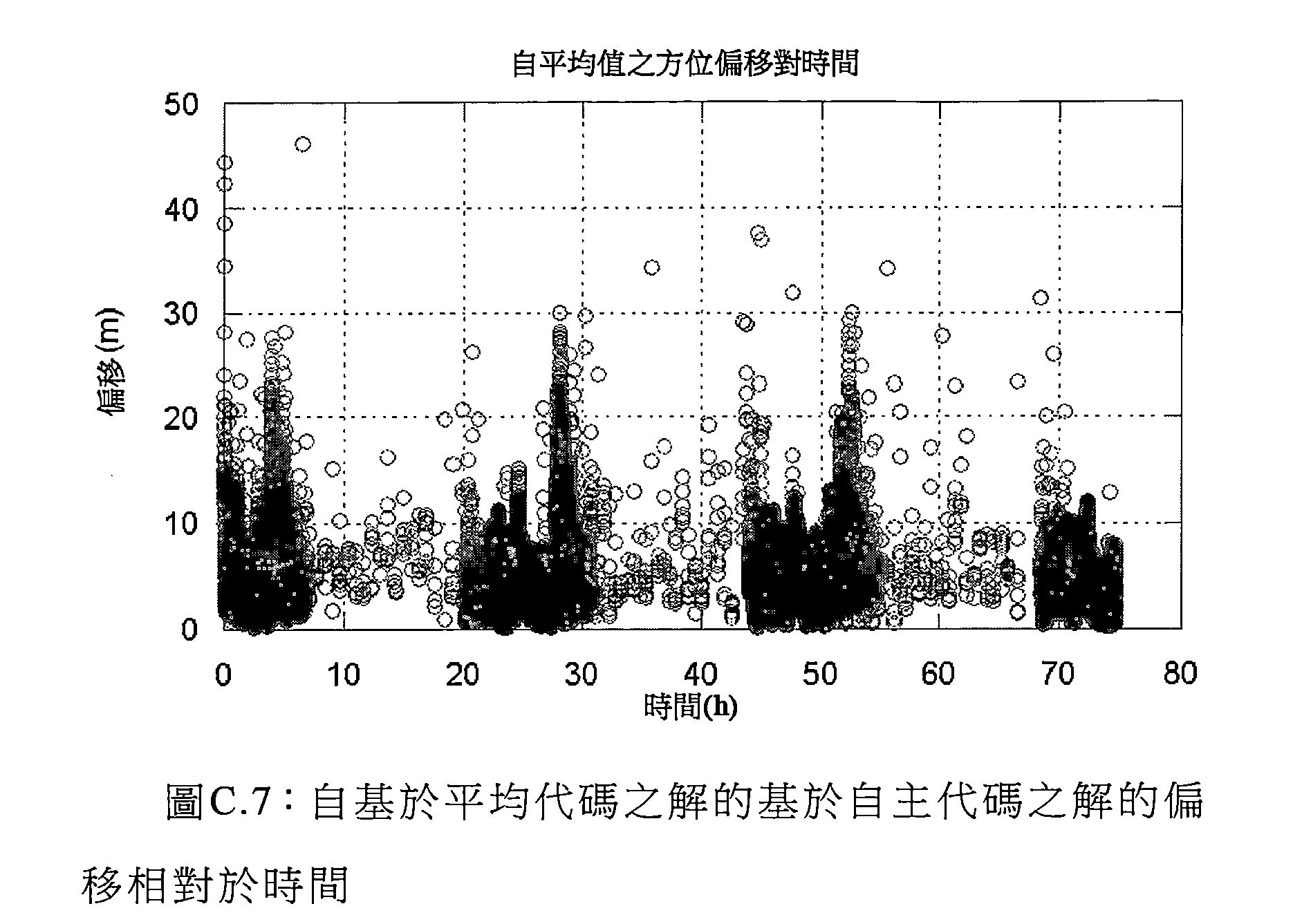
圖C.7中之較低密度地方係在夜晚獲得之方位解,高密度地方係日間解。對於此測試,一個標準差等於2.9m。對於每一隔開事件計算大約7.7個方位解。在一年的特定時間在彼位置處,夜間大約持續13小時,此意謂在夜晚一秒0.003方位解之解密度,或0.3%之有效工作循環;此非常好地與0.25%之近似預期有效工作循環相比較。
在白天期間,實際上吾人藉由比較可說工作循環為100%,因此解之99.7%係在白天期間獲得。然而,夜間時之資料在整個夜晚期間相對均勻地隔開,此係能量分佈之目標。因此,吾人之能量分佈演算法有效於在夜晚操作GPS接收器,使得不極大地叢集其得到之觀測。在夜晚獲得觀測之可能優點可能係作為減輕解偏差之方式。另外,GPS接收器能夠有時在夜晚操作並在夜晚之彼等時間內至少獲
得基於自主代碼之解,從而增加時間資訊。
歸因於時間約束、增加之複雜度及吾人主要關注通常來自24小時時段之許多觀測形成一個解的靜態解,因此並未進一步採取在整個夜晚期間分佈觀測。然而,吾人已展示實際上有可能在夜晚使用極低工作循環及或非常大電容器獲得解。顯然,許多其他新演算法可以較大複雜度建立以允許諸如恆星濾波及獲得基於曆元之解之此等技術。
網路
資料必須在節點與進行最終處理之主電腦之間傳送。吾人將此分成兩個區段;WSN區段及網際網路區段。網際網路區段由在已進行任何處理之後自其到達基地台之時起的資料流程組成,處理係諸如時間模糊度解析、重複封包移除、非依序封包移除等等。WSN區段由資料流程及節點之經處理資料之間的處理(直至其交遞至網際網路區段)組成。
D.1 網際網路區段
網路之網際網路結構為直播器、伺服器、用戶端結構。此為網際網路協定RTCM網路連接輸送(NTRIP)用於在網際網路上存取GPS接收器的相同想法。實施自訂直播器、伺服器、用戶端結構之吾人自身的實施方案,吾人稱其為JAC封包。下圖展示用於兩個試驗台之結構。

裝置伺服器充當用於WSN閘道器裝置及實體連接之GPS接收器兩者的驅動器以及資料至JAC封包直播器之供應器。因而,其任務中之一些任務係用於網際網路區段,而其他任務係用於WSN區段。在先前圖中,裝置伺服器上之虛線表示其兩個任務之間的接面。裝置伺服器充當JAC封包直播器可連接至以獲得希望記錄在JAC封包伺服器處之資料的伺服器。JAC封包直播器經由保持開啟的TCP連接而附接至JAC封包伺服器,且JAC封包伺服器記錄來自每一試驗台之傳入資料。JAC封包用戶端接著可連接至JAC封包伺服器且獲得來自試驗台之經記錄資料或來自試驗台
中之一者的即時串流。對於連接至JAC封包伺服器之JAC封包直播器,鑑認係經由使用者名稱及密碼;對於JAC封包用戶端不實施鑑認要求。不對基地台進行資料之記錄,意謂若網際網路連接停止,則資料將丟失。
D.2 WSN區段
在設計階段期間,因為與建立困難多跳網路相比較,獲得解之處理程序更重要,所以最初設想單跳網路。然而,在臺灣廬山之真實壽命試驗台中,節點傳輸距離被發現為並不足夠且需要延伸距離之方式。歸因於節點上之有限時間及有限資源兩者,設計及實施專用中繼器節點以延伸距離。
以下圖像展示節點、中繼器及基地台之專用於建立經交遞至網際網路區段之資料的部分。

D.2.1 中繼器
為了使用中繼器,將兩個額外位元組添加至每一資料封包。一個位元組為序號,而另一位元組為8個旗標,其中
每一旗標對應於中繼器節點編號之模8。資料封包序號不與每一802.15,4封包之標頭中的序號相同。
每當封包由節點傳輸時資料封包序號就將增加。同時所傳輸之旗標位元組將被設定為零。因此,收聽資料封包之任何人將能夠告知此等封包之次序,使其中之任一者遺漏,外加知曉其來自節點而非中繼器,此係因為旗標位元組已被設定為零。
中繼器含有其最近藉由儲存802.15.4標頭封包序號及源節點編號而發送之小封包清單。當中繼器聽到封包時,若中繼器發現其已發送該封包,則其將不再次發送該封包;此有助於防止無限傳輸循環發生及重複中繼器已發送的資料。另外,當中繼器聽到封包時,若中繼器發現中繼器旗標位元組之其位元已經被設定,則其將不再次發送此封包;雖然可能並不嚴格地需要,但此完全防止無限傳輸循環發生。
當中繼器發送封包時其欺騙802.15.4標頭以便匹配於發端節點。此欺騙資訊意謂802.15.4標頭中之源MAC位址及序號兩者匹配於發端節點之源MAC位址及序號。中繼器設定對應於中繼器之節點編號的中繼器旗標位元組之位元。另外,中繼器使用節點編號及802.15,4標頭封包序號更新經傳輸封包清單。使用802.15.4標頭封包序號而非資料封包序號的原因係允許節點有機會發送複本封包以縮減封包丟失。
吾人意識到,歸因於聽到來自一節點之同一封包而兩
個中繼器同時傳輸的可能性仍繼續存在。然而,若中繼器可彼此聽到,則csma/ca演算法應至少設法減輕此效應,使得來自中繼器之兩個所得封包被依序發送。
D.2.2 裝置伺服器
裝置伺服器之作用的另一半係自其聽到之「節點演算法資料」求解時間模糊度、移除複本封包,及移除非依序封包。
首先,裝置伺服器求解時間模糊度。為了移除複本封包及非依序封包,裝置伺服器進行以下操作。其追蹤循環緩衝器中之自每一節點接收之最後10個唯一資料封包。若在循環緩衝器中找到封包,則其被視為複本且被丟棄。若其並非為複本,則封包被放入循環緩衝器中。若封包之GPS時間比循環緩衝器中之其他10個封包中之任一者早,則封包被丟棄。否則,其經傳遞至網際網路區段。此防止複本封包及封包之非依序次序兩者傳遞至網際網路區段。
D.2.3 相控
中繼器僅僅重複其聽到的封包;其不知曉封包將何時到達。由此,對於充當中繼器之中繼器,其無線電必須連續地接通,此使用使GPS接收器接通使用的功率之大約70%。此為相當大的功率,意謂需要工作循環。
雖然可能不存在足夠輻照度以使任一節點連續地保持作用中,但若節點全部輪流在作用中,則有可能存在一個節點在白天時間期間始終在作用中,因此強迫中繼器連續地接通。當然,若不存在足夠輻照度,則一個中繼器不可
連續地在作用中狀態中。若節點及中繼器在某種程度上全部經同步以變得同時在作用中且節點及中繼器兩者大約獲得相同量的輻照度,則節點接著在中繼器必須在非作用中之前將全部變得在非作用中,此係因為與中繼器相比較,節點在某種程度上使用更多功率;因此中繼器將完全地伺服節點需要。
當中繼器在作用中且全部節點在非作用中時,會出現另一問題。在此狀況下,當節點最終變得在作用中時中繼器可必須變得在非作用中以節省能量,不能充當用於作用中節點之中繼器。因此,當節點活動停止時中繼器變得在非作用中係有意義的。
自此等兩個問題,形成對WSN網路中之全部節點及中繼器進行相控的想法。該想法係使中繼器及節點同時變得在作用中且同時變得在非作用中;以便彼此同相。
因為雙差可僅由來自同時接通之兩個GPS接收器之觀測形成,所以對同時變得在作用中之節點進行相控意謂,與節點彼此不同相的情況相比較,可由節點自身形成更多雙差。雖然觀測引起關注,但歸因於時間約束,並不研究此效應。
D.2.3.1 相控演算法
吾人設計及實施針對吾人之節點及中繼器的相控演算法。此演算法之主要假定係全部節點及中繼器獲得相同輻照度。
在假定輻照度對於全部節點及中繼器相同的情況下,
全部節點可具有相同工作循環及接通時間,在中繼器相比於節點在作用中時使用稍微較少的功率的相同時間,中繼器可至少匹配於節點之工作循環及接通時間。
無論節點是否正獲得適用之觀測,節點皆將發送資料封包以向節點及中繼器兩者通知節點使其GPS接收器接通;當不可獲得適用之觀測時此等封包將為空白,否則其將含有通常「節點演算法資料」。若其為空白,則其在裝置伺服器處被丟棄。
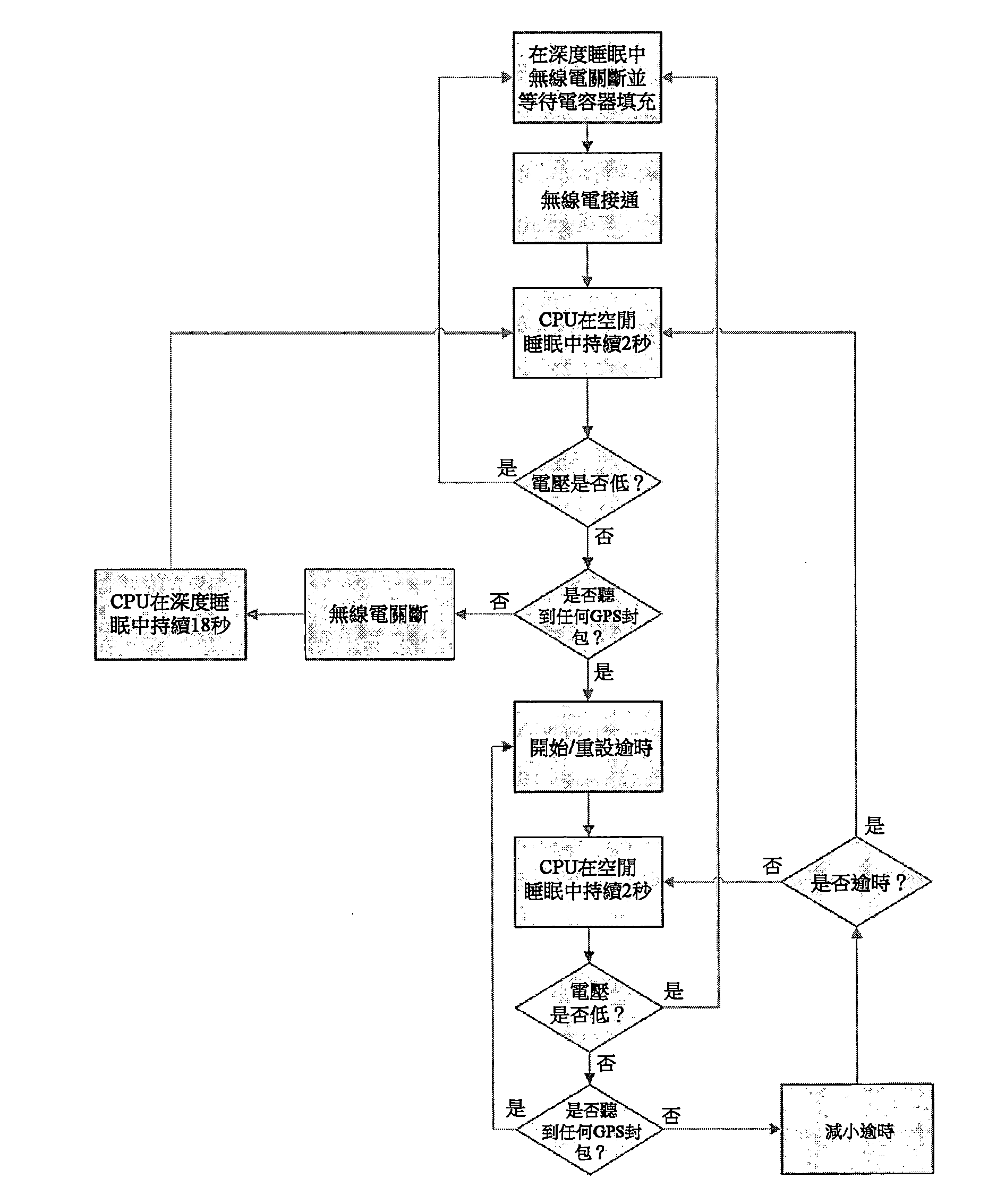
當節點之超級電容器達到2.2V時,其被視為充滿且節點將開始相控時段,若未聽到GPS封包,則相控時段將在10分鐘之後逾時。在下圖中描繪如在節點上所運行的相控演算法。

在吾人之實施方案中,在節點相控期間需要相對小功率,此係因為使用大約10mW或GPS接收器在接通的情況下將使用的功率之4%,節點僅僅持續2秒接通其無線電且接著再次持續18秒關斷。在吾人之實施方案中,此相控時段可持續高達10分鐘。在此相控時段期間若聽到表示其他節點使其GPS接收器接通的任何資料封包,則節點將退出
相控時段並開始正常收集觀測的GPS資料。另一方面,若在10分鐘之後仍沒有聽到表示其他節點使其GPS接收器接通之資料封包,則節點將退出相控時段並開始正常收集觀測的GPS資料。
在下圖中描繪如在中繼器上所運行的相控演算法。
在無節點活動之時間期間,中繼器運行相控時段,中繼器將持續2秒接通其無線電以收聽資料封包且接著再次關斷。若聽到表示其他節點使其GPS接收器接通之資料封包,則中繼器接著變得在作用中,且若未聽到表示其他節點使其GPS接收器接通之新資料封包,則將被觸發的逾時開始。當逾時被觸發時中繼器再次返回至相控時段中。只要中繼器在其演算法中,若電容器之電壓位準變得太低,則無線電就將關斷且中繼器將等待其超級電容器電壓再次上升至2.2V。
多路徑及恆星濾波
基於曆元之解為此時使用來自一個曆元之觀測來獲得解的解。基於每天之解為此時使用來自一天之全部可用觀測來獲得解的解。在此論文中吾人主要集中於基於每天靜態之解。
演算法之恆星部分使用固定解及相對於有偏位置的絕對包裝殘餘堆疊兩者之堆疊技術實施恆星濾波;此經設計以改良在觀測為間歇的吾人之特定情境下之解準確度及精確度。在此章中,吾人藉由研究被證明係吾人之雙差中的最大誤差源的多路徑而開始。自此,假定模糊度解析度為求解問題,吾人重寫吾人之雙差模型以包括僅僅多路徑及加成性白高斯雜訊並判定當間歇地採取觀測時吾人獲得的吾人之解的分佈。吾人接著導出吾人之恆星濾波公式並展示在模擬中及在真實壽命中其實際上改良吾人之解。吾人亦展示歸因於吾人獲得觀測之隨機間歇性質,與吾人使用連續供電GPS接收器輸出恆定高速率觀測相比較,吾人在解精確度方面獲得較大改良。
相位可觀測量之多路徑誤差歸因於經由不同路徑到達接收器之載波的疊加。此具有似乎延遲到達接收器之載波的效應。對於除了直視線信號以外的單一反射信號,相位可觀測量之多路徑誤差可經模型化如下,其中α為阻尼因數,λ為標稱波長,且Φ為兩個信號之間的循環之相位差[60]。

當阻尼因數等於1時此產生絕對最大誤差 。因此,理論最大雙差誤差可為一個循環或大約19cm,此係因為四個此等相位可觀測量用以產生雙差。雙差分化移除大部分系統誤差,但留下與所觀測衛星之幾何形狀相關的誤差,諸如多路徑及PCV。圖3.1展示持續一天在臺灣廬山試驗台位點處使用吾人之硬體獲得的全部對衛星之雙差殘餘。
。因此,理論最大雙差誤差可為一個循環或大約19cm,此係因為四個此等相位可觀測量用以產生雙差。雙差分化移除大部分系統誤差,但留下與所觀測衛星之幾何形狀相關的誤差,諸如多路徑及PCV。圖3.1展示持續一天在臺灣廬山試驗台位點處使用吾人之硬體獲得的全部對衛星之雙差殘餘。
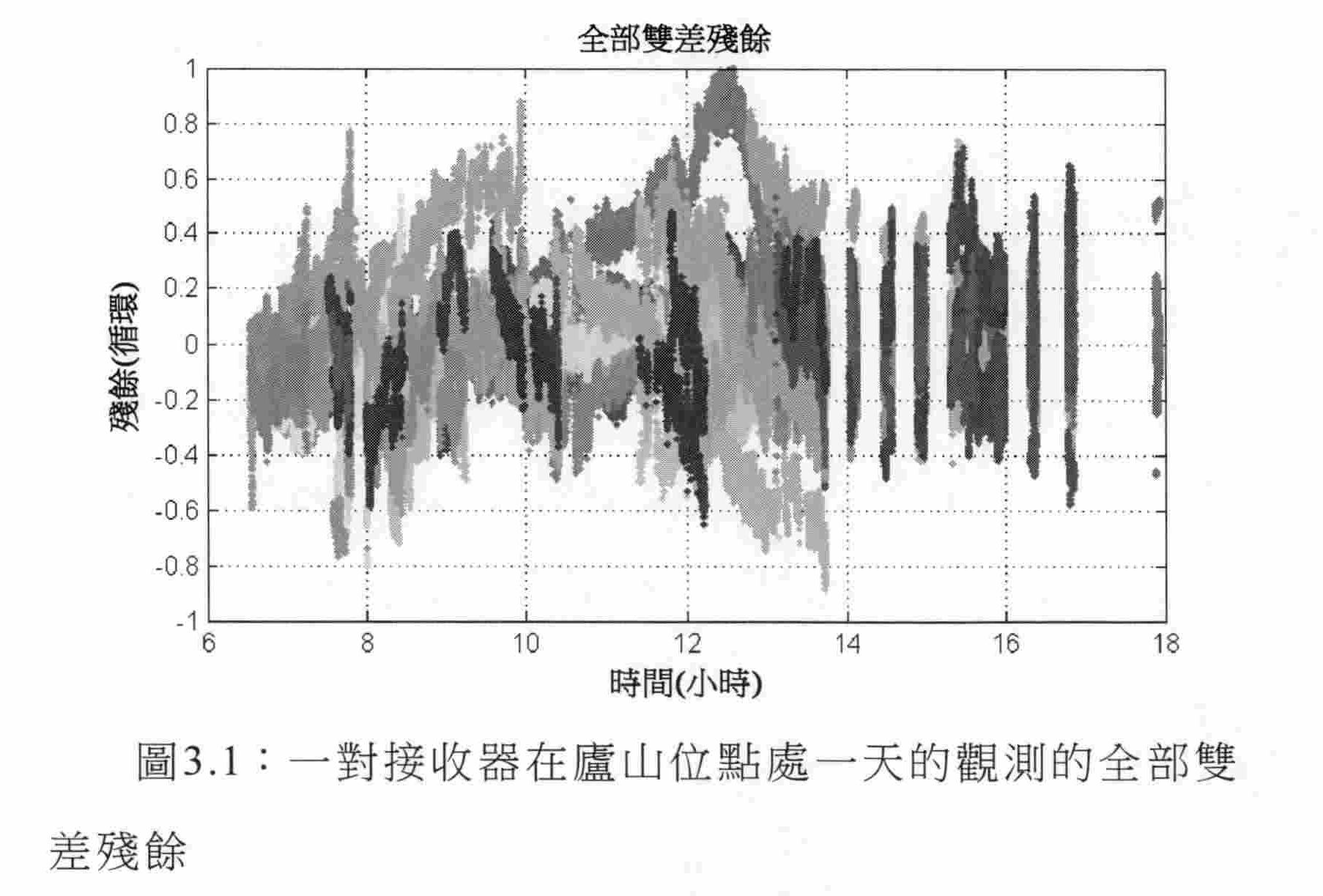
PCV似乎非常類似於多路徑,惟對天線旋轉之相依性除外。因為此情形,吾人將PCV與多路徑誤差集總在一起。如自圖3.1可看到,存在為吾人將自多路徑誤差預期的最大值之高達約一個循環之偏差。然而,解開演算法可失效且引入循環滑移,循環滑移亦可為先前圖(圖3.1)中獲得之極
高讀數中之一些的原因。在處理吾人之資料時,吾人使用為2之代碼因數,因此圖3.1中之循環滑移將引起0.5循環之偏移。吾人應看到,多路徑被證明係雙差殘餘的方差之最主要分量。此亦藉由參考文獻支援,諸如主張「多路徑為差分載波相位及虛擬距離量測中之主要誤差源」的[55]及說明「多路徑常常視為精確GPS定位中之最多限制因數」的[45]。來自圖3.1之雙差並非為用以獲得解的誤差源。實際上,使用具有最高仰角之衛星作為參考衛星的雙差之獨立集被使用;此等雙差之殘餘可在圖3.2中看到。
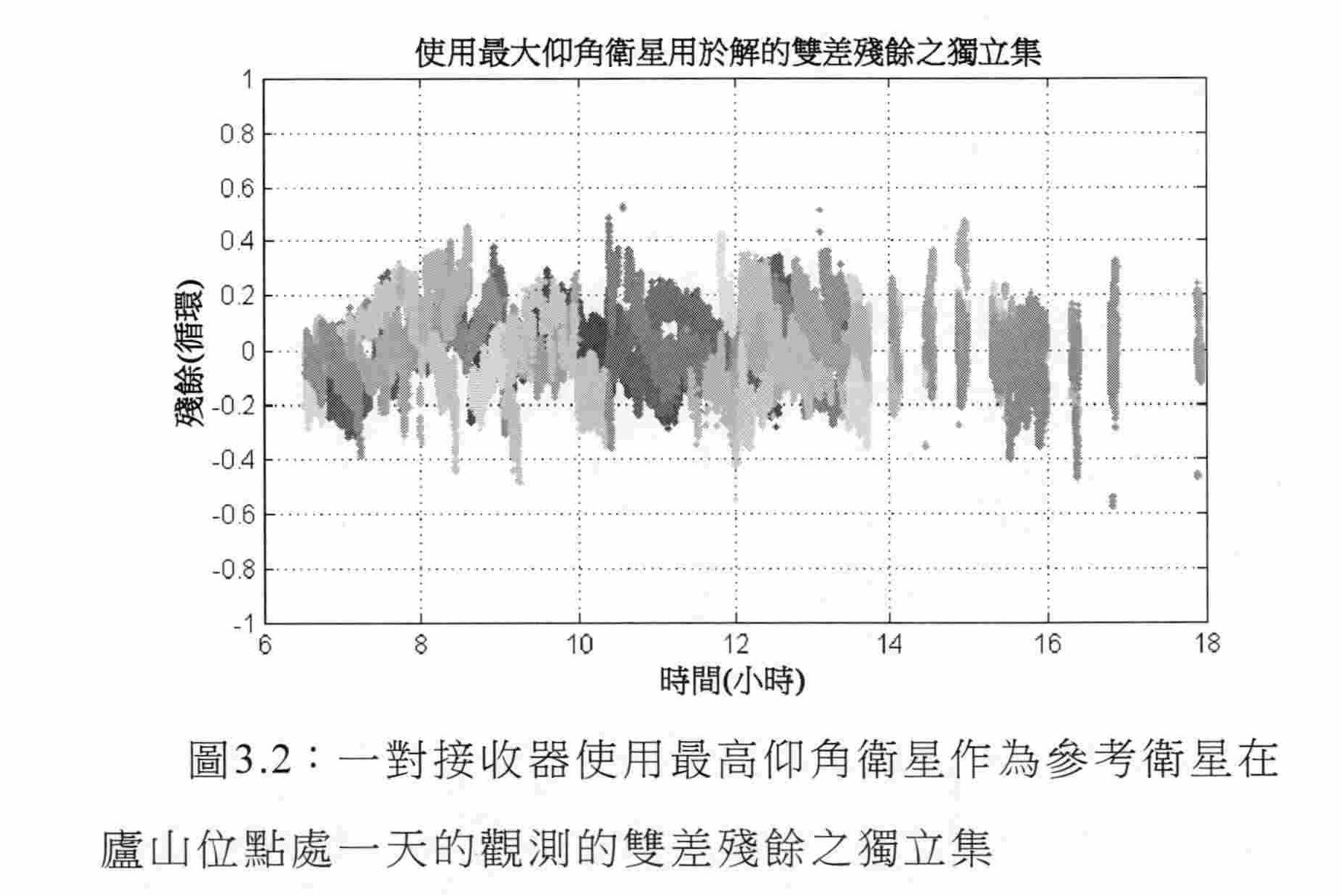
自圖3.2,顯而易見的是,方差顯著較少,但如吾人應看到仍比平均量測雜訊大很多。
自圖3.1中之殘餘,出現在幾個小時之相對長時間內緩慢變化的大分量。除了緩慢分量以外,出現週期性且具有通常約5至10分鐘之時段的快速分量亦可看到且在某種程
度上具有三角形性質。若吾人僅少量放大來自圖之跡線中的一者,則快速週期性分量可更清晰地看到;此可在圖3.3中看到。

此高度時間相關多路徑被稱為鏡面多路徑且由光滑表面(可能是地面)之反射產生且當每一曆元計算解時及亦如在吾人之當針對一整天計算一個解時的狀況下導致定位誤差[41,20]。在高多路徑環境中,解誤差可為實質性且為約幾個公分[20]。
3.1 衛星及多路徑週期性
歸因於GPS衛星軌道週期,衛星大約每隔24小時246秒重複其相對於基於地面之使用者的位置,亦錯誤地被稱作GPS恆星週期(錯誤地,如恆星日並非為24小時246秒而實際上為24小時236秒)。雖然衛星具有稍微小於12小時之軌道週期,但歸因於地球之旋轉,衛星相對於基於地球之觀測者大約每隔24小時而非12小時大約出現在天空中之同一地方。GPS衛星偶爾地進行操縱以確保其大約維持相對於地球之固定地面軌跡。根據文獻,地球扁率引起升交點向
西偏移,此藉由將GPS軌道週期減小大約四秒而補償[19]。一日中存在兩個軌道週期,此引起與恆星日之大約八秒差。此值僅僅為近似值且衛星重複時間已看到變化至少9秒[24]。因為衛星重複週期僅僅為近似值,所以吾人僅使用24小時246秒之一個固定重複時間,藉由[24]之一組觀測發現該固定重複時間與平均重複時間有1秒差且匹配於資料集中藉由[34]給出的平均重複週期。在吾人之論述中,吾人將24小時246秒之GPS衛星重複時間錯誤地稱為恆星週期且將其假定為指代吾人之給定標稱衛星重複週期且並非實際恆星日長度,吾人這樣做係因為此濾波處理程序通常稱為恆星濾波而非GPS軌道重複週期濾波。
多路徑隨GPS接收器之周圍環境及衛星幾何形狀而變。因此,只要GPS接收器之周圍環境不相對於GPS接收器改變,則多路徑誤差應自一個恆星日至下一恆星日係類似的。此允許判定吾人在圖3.1中看到的大誤差係歸因於多路徑抑或某一其他誤差形式的方式。在以下兩個圖3.4及圖3.5中,吾人繪製自吾人之硬體獲得的對於固定GPS接收器針對兩個相異恆星日之一對衛星的雙差殘餘;一者針對衛星對在一日中可見的整個時間,且另一者針對其之小特寫部分。

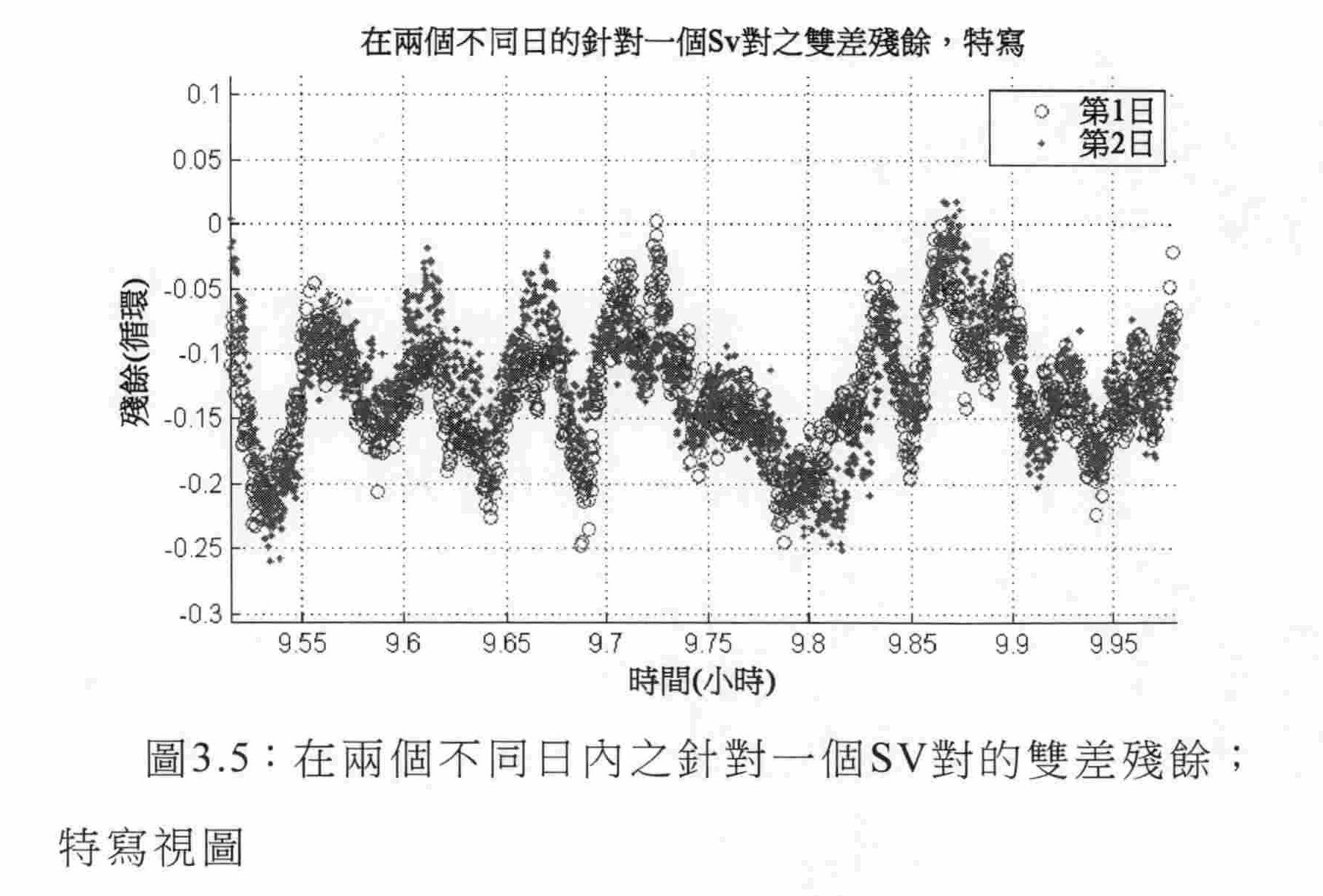
如可看到,甚至對於小快速週期性三角形分量在日之間存在非常接近匹配。因此,吾人推斷圖3.1中可見的誤差之大部分係歸因於多路徑及PCV。
3.2 剩餘誤差
假定整數模糊度解析已成功,吾人可更簡單重寫吾人之雙差模型如下,其中全部下標、上標及索引已被移除。
λΦ=△n.P+M+e (3.1)
吾人已將剩餘誤差分成由歸因於吾人視為多路徑之幾何形狀(衛星位置、接收器周圍環境及PCV)之誤差組成的M,及雜項誤差e。雜項誤差將由量測雜訊及其他誤差組成。因為吾人僅僅使用雙差之獨立集(其中具有最大仰角之衛星用作參考衛星以用於解),所以吾人僅僅關注僅僅此等獨立雙差值中之剩餘誤差而非其他。如圖3.2中所見,吾人關注雙差而非其他者。當估計剩餘誤差時,吾人僅僅使用此等雙差。
3.2.1量測雜訊
為了獲得量測雜訊之近似值,在給定準確方位估計情況下,對於60對衛星,吾人採取一秒時間差分雙差殘餘(r(t)-r(t-1)),接著量測平均方差。因為衛星看起來相對緩慢自地球束縛觀測者移動並假定其他誤差相對緩慢改變,所以一秒差將主要由量測雜訊組成。下圖3.6展示用於該等衛星對中之一者的用以獲得估計的一秒時間差分雙差殘餘。

因為此為加成性白高斯雜訊之差,所以對於雙差,此需要除以2的平方根。自此,吾人獲得歸因於0.013循環之量測雜訊的雙差之平均標準差或var(雜訊)=0.000169循環2的方差。因為量測誤差取決於信號強度,所以低至0.009循環之誤差經獲得用於一對衛星而0.019循環之最大值經獲得用於另一對衛星。因為雙差由誤差之兩個倍增組成,所以為了獲得吾人之GPS接收器中的一者的量測誤差之估計,此等值必須除以4之平方根。因此,平均起來,吾人之GPS接收器應具有95%可信度,與真值之0.013循環或約1%循環相比較,其將更好地正確地量測相位可觀測量。
3.2.2 多路徑誤差
多路徑誤差高度取決於位置,因此,對於其方差,可能無法獲得確切值。如吾人已看到的上限針對雙差為一個循環且針對一個接收器自身為四分之一循環。另外,自實
際資料量測多路徑亦可能係複雜的,此係因為雙差殘餘之恆星差分化自一日至下一日未完全消除多路徑。此係因為雙差需要兩個衛星且因為此等兩個衛星之重複時間將不相同,嚴格地講,不存在衛星相對於彼此將在確切相同位置中的確切時間。其他人已意識到相同問題且已設計將雙差變換成單差且接著將每一衛星與更多確切重複時間對準接著將此等單差變換回成雙差的技術[62]。然而,吾人不使用此方法且超出此論文之範疇;因此吾人進行衛星之對準自一個標稱衛星重複週期至下一週期係確切相同的近似。藉由使用恆星差分化之此近似,吾人可獲得多路徑誤差及其他誤差之量值的近似想法,吾人不可運用恆星濾波之吾人特定方法來校正多路徑誤差及其他誤差。
圖3.7展示連續兩日之恆星差以及兩日殘餘·

在廬山試驗台位點處在一日內對用於最終每天解之全
部衛星對進行此恆星差分計算的情況下,恆星方差之平均值經判定為0.0014,而第二日之平均值為0.0096。恆星方差可書寫為var(恆星差)=2×var(雜訊)+2×var(其他)
而第2日之方差可書寫為var(第2日)=var(雜訊)+var(其他)+var(吾人可校正之多路徑)
此又暗示

及var(其他)=var(第2日)-var(雜訊)-var(吾人可校正之多路徑)
因此var(吾人可校正之多路徑)=0.0089循環 2且var(其他)=0.000531循環 2。
在進行衛星之對準自一個標稱衛星重複週期至下一週期係確切相同的近似的情況下,吾人說對於所使用之兩個接收器,在廬山試驗台處信號中之平均多路徑具有0.094循環之標準差,而其他誤差之值具有0.023循環標準差。
因此,多路徑的0.094循環之標準差對於此特定例項為下限,而1循環為上限。因此,看起來量測雜訊小於多路徑誤差至少一數量級,因此相當微不足道。其他誤差無庸置疑具有多路徑之某一分量但難以判定。吾人將其他誤差與
量測雜訊組合,吾人將其他誤差與量測雜訊稱為雜項誤差,而吾人可校正的多路徑誤差之組合,吾人稱為多路徑誤差。因此,在此特定境況中吾人獲得此等兩個誤差之以下標準差。
σ e =0.026循環
σ M =0.094循環
定性標準差值
雖然當然此取決於GPS接收器周圍環境,但其給出多路徑誤差及非多路徑誤差兩者的量值之想法。多路徑誤差此處為下限,因此係保守的。即使如此,吾人已檢查的誤差(吾人將其一起集總至多路徑中)之重複性質仍大於組合之暫時誤差的剩餘者之重複性質許多倍。因此,恆星濾波之某一形式似乎有利於使用。
3.3 日間恆星濾波
日間恆星濾波解(日間解)為使用除了在自身所討論之日中可用的全部觀測以外亦使用在其他日中全部可用觀測的每天解;其他日可未必係連續日。
衛星重複性質允許吾人將在不同恆星日獲得的雙差視為好像其幾乎相同。當衛星位置相同時,若接收器位置及其周圍環境兩者皆不變,則差量範數及多路徑M亦相同。在此狀況下,若今天用以獲得方位解之雙差亦與明天用以獲得解之雙差相同,則兩個解應非常類似。
吾人定義下標k及n以表示恆星日。出於簡單起見,吾人不給出表示一日內之時間的記號。對於彼此匹配的兩個
雙差,吾人定義其必須在不同恆星日相對於a p 之整數倍數分離不大於一秒,且雙差屬於同一衛星及接收器對,其中a p 為標稱GPS衛星軌道重複週期。當雙差彼此匹配時,吾人進行衛星幾何形狀對於兩個雙差係確切相同的近似。吾人將N定義為含有用於一日之每一可能差量範數,而N k 含有僅僅在第k日使用的差量範數,類似記號用於多路徑,M用於在一日期間之每一可能的多路徑,且M k 用於在第k日使用的多路徑。
吾人可對於一日之全部雙差及對於第k日取樣之雙差兩者之多路徑進行分解因數;亦即M=NP M +M MNL 及M k =N k P M,k +M MNL,k 。此允許吾人將方程式3.1重寫如下,此意謂吾人之解歸因於多路徑而有偏。
λΦ k =△n k .(P k +P M,k )+M MNL,k +e k (3.2)
因此,吾人可說對於第k日,解採取如下分佈,假定多路徑係以零平均值正態分佈,其中α k 為用於第k日之每天雙差之百分比。
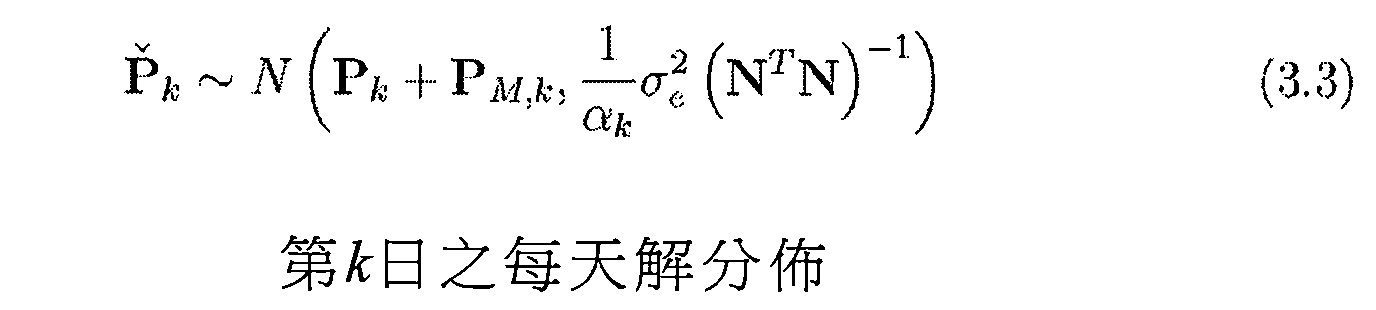
若每日使用相同雙差,則P M,k 變得固定且解之方差係僅歸因於所使用之雙差之數目及雜項誤差。儘管解將係有偏解,但對於其中相對移動係有關注價值的地面變形監測而言,此固定有偏將係不相關的,因此解將與吾人可能希望的一般好。
若吾人假定吾人每日不可獲得相同雙差,且實際上吾人隨機地取樣具有均一分佈之全部每日雙差之α百分比,則吾人僅僅具有假設明天將存在匹配雙差的今天獲得之雙差的機率,則吾人之解在足夠日情況下應如下分佈,使得PM,k之平均值更緊密類似於如吾人預期PM,k~N(P M ,(1-α k ) (N T N)-1)之PM之平均值。
(N T N)-1)之PM之平均值。

在此狀況下,在足夠日內吾人預期固定偏差,但具有大於之前的方差。吾人現在面臨兩個問題,第一問題顯然係方差的增大,而另一問題係每天多路徑偏差PM,k每日如何改變。GPS衛星重複時間相對於24小時每日滯後約四分鐘,因此若吾人可在整個全部白天時間期間獲得觀測,則吾人將預期每天多路徑偏差之緩慢改變。在此狀況下解可能看起來類似於就好像節點之實際方位在移動一般。作為實例,吾人進行以下模擬:吾人產生正態分佈多路徑、差量範數及雜項誤差,其中雜項誤差顯著小於多路徑誤差。吾人設定[1,1,1]之固定節點位置,計算針對全部曆元之可觀測量Φ,每日使用連續曆元之50%並每日將此移位0.3%,因此僅僅在白天時間期間模擬獲得觀測。下圖3.8展示使用吾人之模擬的解之x座標的繪圖。「Phat」係針對 ,「Pm偏移(PM offset)」係針對P M +P k ,且「實際(Actual)」係針對P k 。如可看到,存在緩慢移動,其中來自P M 之偏差
可較大。解之分佈匹配於如方程式3.4中給出的分佈。視覺上難以告知節點係靜止抑或移動。另外,如自圖表可看到,解具有歸因於每日四分鐘移位的大約一年之重複時段。
,「Pm偏移(PM offset)」係針對P M +P k ,且「實際(Actual)」係針對P k 。如可看到,存在緩慢移動,其中來自P M 之偏差
可較大。解之分佈匹配於如方程式3.4中給出的分佈。視覺上難以告知節點係靜止抑或移動。另外,如自圖表可看到,解具有歸因於每日四分鐘移位的大約一年之重複時段。

比較起來,再次以相同參數運行相同模擬,惟改為每日使用確切相同之雙差除外。在圖3.9中標繪解之x座標。如可看到,當P M,k 固定時,剩餘方差係歸因於如方程式3.3中給出的雜項誤差。
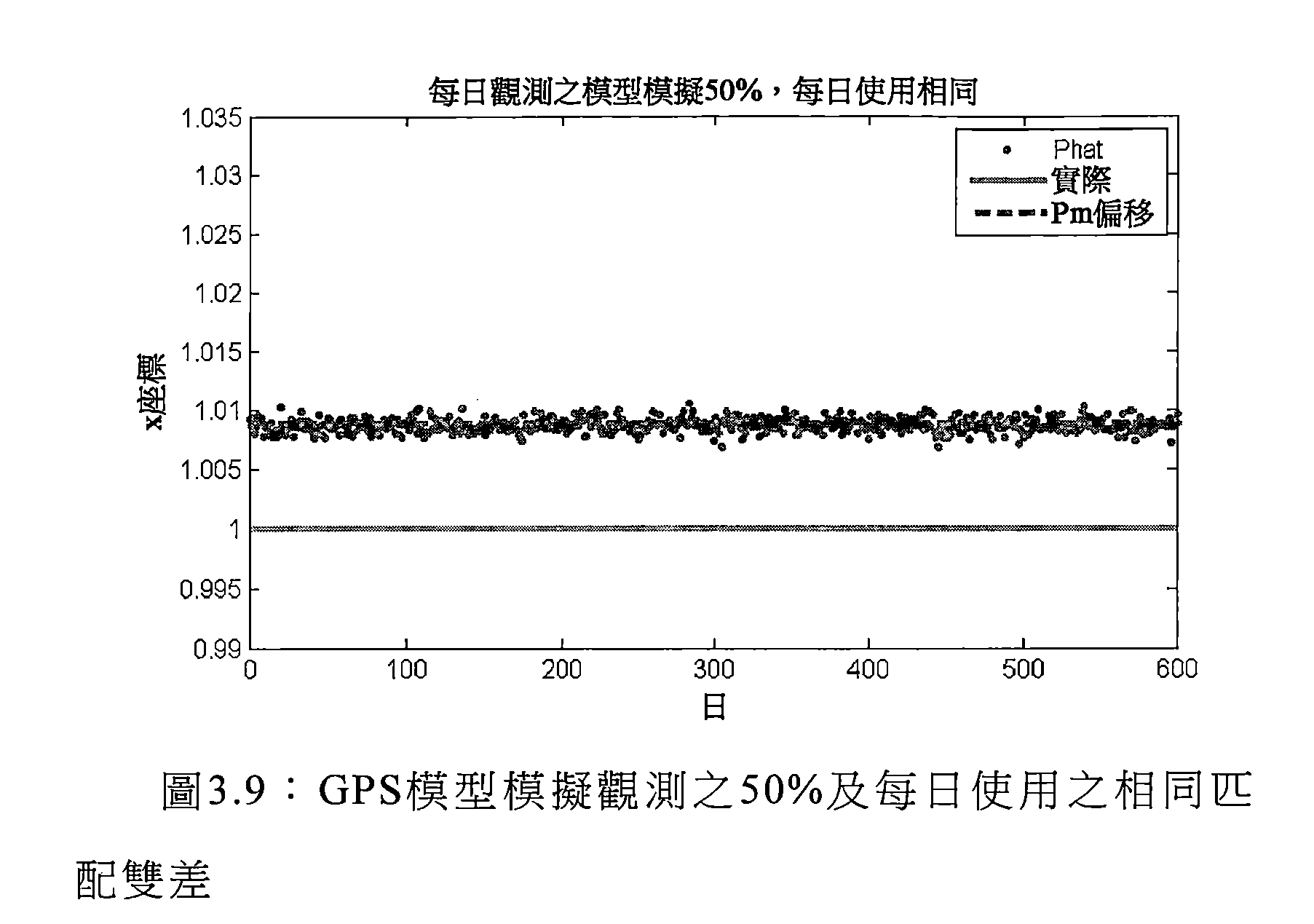
因此,吾人之情境係,短期內分佈可遵循方程式3.3,但在較長時期內分佈可遵循方程式3.4。
因此,為了縮減短期及長期之解方差,應一日24小時每秒一次採取觀測且每日使用相同之雙差處理資料。在運用永久供電之GPS接收器的情況下,非常易於每日獲得相同雙差且一日24小時每秒一次獲得,此係因為有足夠功率做到這一點。然而,在吾人之情境中,吾人不可僅僅在半夜接通吾人之GPS接收器,僅因為此處存在吾人需要匹配於吾人昨天使用之雙差的雙差以計算解。因此,對於吾人之情境,吾人將預期造成解方差增大之相當小的a值,而一秒一次取樣的永久供電高速率GPS接收器之情境將具有產生具有較少方差之解的大a值。吾人具有一具有大方差量之有偏估計器。吾人現在利用長期內P M,k 為隨機變數之事實。
使用吾人之來自方程式3.1的模型,吾人看到,對於第
k恆星日,以P B 及實際位置P k 評估之以循環為單位的殘餘可被書寫如下。

對於使用雙差之恆星差分化,今天之殘餘減去昨天之殘餘得到自昨天觀測以來的位移;此被書寫如下。

加性雜訊加倍,多路徑被移除,且使用LS得到昨天與今天之間的位移之估計 。其為非常精確之解,但該解係針對位移且並非針對方位,因此對於基於精確曆元之解係極好的,但對於每天解改良卻一無幫助。因此,恆星差分化移除方位資訊。若吾人希望獲得方位解,則吾人將必須添加昨天之方位至位移,此將再次將多路徑誤差添加回至方程式中。
。其為非常精確之解,但該解係針對位移且並非針對方位,因此對於基於精確曆元之解係極好的,但對於每天解改良卻一無幫助。因此,恆星差分化移除方位資訊。若吾人希望獲得方位解,則吾人將必須添加昨天之方位至位移,此將再次將多路徑誤差添加回至方程式中。

在許多此等天內平均化,吾人獲得下式。

在足夠天內,吾人預期 ,則
,則

因此,使用LS以獲得針對Pn之估計 ,使用此方程式吾人將接著預期以下分佈。
,使用此方程式吾人將接著預期以下分佈。

其與吾人每日使用相同雙差時之分佈相同。當然,此為準確度及精確度之上限。若吾人考慮在許多此等天內平均化的算術平均值,則事情變得更複雜,此係因為僅僅存在吾人可首先形成殘餘差r n -r k 的機率。由此,吾人將條記號定義為所計算的算術平均值,可能時包括當天n。對於在第n日之r k ,此為 ,其中Ω含有匹配殘餘集;在此特定例項中{rn}表示僅僅含有r n 之集合並確保
,其中Ω含有匹配殘餘集;在此特定例項中{rn}表示僅僅含有r n 之集合並確保 經合理地定義。儘管條記號對於連續日有效,但吾人此處出於簡單起見僅僅考慮小於或等於第n日之m個連續日;吾人如自此以後將如此認為。因此,更一般而言,吾人書寫下式。
經合理地定義。儘管條記號對於連續日有效,但吾人此處出於簡單起見僅僅考慮小於或等於第n日之m個連續日;吾人如自此以後將如此認為。因此,更一般而言,吾人書寫下式。




因此,使用方程式3.11之針對P n + 的LS估計
的LS估計 具有如下分佈。
具有如下分佈。

在吾人之情境中,吾人不可整日隨機地取樣α觀測,此係因為節點僅僅能夠在白天時間期間操作。若吾人將白天時間相對於整日之百分比定義為β,則吾人僅僅能夠隨機地取樣在白天時間內的觀測之α百分比(亦即,吾人獲得每日全部可能觀測的αβ百分比且此等中之全部係在白天時間)。每日,3指的觀測經移位四分鐘,因此第k日在時間上離開第n日更遠,能夠形成殘餘之機率下降。因此,運行平均值所針對的日愈多, 中項目之數目增加愈小,直至在足夠日的情況下,不存在重疊且存在添加彼日至平均值將無論什麼產生任何差的零機率。另外,吾人應注意,不管吾人平均化所針對的多少日,相比於每日不存在四分鐘移位,r n 為較少事物之平均值。在此狀況下,吾人具有某一函數g(α,β,m,δ),其中吾人可將解之分佈書寫如下。
中項目之數目增加愈小,直至在足夠日的情況下,不存在重疊且存在添加彼日至平均值將無論什麼產生任何差的零機率。另外,吾人應注意,不管吾人平均化所針對的多少日,相比於每日不存在四分鐘移位,r n 為較少事物之平均值。在此狀況下,吾人具有某一函數g(α,β,m,δ),其中吾人可將解之分佈書寫如下。

吾人不獲得g(α,β,m,δ)之顯式公式,實際上吾人僅注意,其與αβ及m正相關。
在白天時間期間,節點獲得觀測,但在白天時期間未均一地獲得觀測。實際上,觀測大約在中午獲得較多且在早晨及夜晚獲得較少。然而,為使事情簡單,吾人不考慮此額外複雜情況且改為繼續假定在白天時間期間均一地獲取觀測。在紐西蘭之Paekakariki試驗台中在兩週時段內,
吾人量測在白天時間期間獲得的曆元之平均百分比為30%。因此,為了模擬,吾人使用α=0.3、β=0.5及δ=0.003。另外,吾人經由模擬移動節點[0.05 0.05 0.05]一半。吾人接著使用15天來進行恆星平均化(m=15)。在使用如前所述之相同模擬設定的情況下,吾人獲得圖3.10中之以下模擬結果。

如可看到,平均起來,存在微小解偏差且恆星濾波解進行顯著更好。作為比較,吾人再次進行相同模擬,但此次使用表示使用在白天時間期間之全部雙差的α=1。

自圖3.10及3.11,吾人看到低頻雜訊分量及高頻雜訊分量。當使用日間恆星濾波時,低頻分量顯然相同,僅僅縮減高頻分量。低頻分量似乎為每一年重複並歸因於四分鐘每天移位的緩慢移動解偏差。低頻分量係有問題的,此係因為其看起來像GPS接收器節點隨時間緩慢移動。自此等圖,吾人亦看到,在長期過程中,日間恆星濾波僅僅在高頻雜訊分量具有顯著大於低頻分量之量值的量值時才有效。此等於說僅僅當正常解精確度之量值顯著大於每一年重複之緩慢移動偏差的量值時日間恆星濾波才在改良每天解準確度方面真正有效。
為檢查對於高頻雜訊之日間恆星濾波,吾人僅查看藉由使用一天差分化獲得的雜訊。為顯式 -
- 及
及 -
- 。連續日之間的差產生大約兩倍的存在於解中的高頻雜訊之方差並消除低頻分量。自此吾人可接著看到高
頻雜訊之縮減及因此短期解準確度的改良。此次吾人在不經由模擬添加移動一半之情況下運行模擬以避免離群值。圖3.12展示針對如前所述之α為1及0.3同時β=0.5且δ=0.0032且m=15的
。連續日之間的差產生大約兩倍的存在於解中的高頻雜訊之方差並消除低頻分量。自此吾人可接著看到高
頻雜訊之縮減及因此短期解準確度的改良。此次吾人在不經由模擬添加移動一半之情況下運行模擬以避免離群值。圖3.12展示針對如前所述之α為1及0.3同時β=0.5且δ=0.0032且m=15的 -
- 及
及 -
- 之模擬;此等分別對應於圖3.11及圖3.10之設定。
之模擬;此等分別對應於圖3.11及圖3.10之設定。

圖3.12僅展示在移除低頻雜訊分量後的高頻雜訊分量。如可看到,即使當使用在白天時間期間之全部雙差(α=1.0)時,在使用恆星濾波時仍存在高頻雜訊分量的縮減。然而,當僅僅使用白天時間期間雙差之分率(在此狀況下30%)時,高頻雜訊分量之改良更顯著。在此狀況下,使用白天時間期間之全部雙差造成高頻雜訊分量大約50%的縮減,而當使用白天時間期間雙差之僅僅30%時產生大約80%的高頻雜訊分量之縮減‘因此,當使用白天時期間之觀測之任何分率時,日間恆星濾波在縮減高頻雜訊分量方面有效。高頻分量的縮減當然係解精確度之改良。
吾人最終檢查日間恆星濾波對解的效應,其中一日中之每一雙差用以計算解;在此狀況下,α=1、β=1且δ不相關。在經由模擬來運行此情形的情況下,吾人獲得圖3.13。

如所預期,在恆星濾波之前及之後的解係相同的且不存在準確度或精確度之改良。另外,不存在每年重複的緩慢移動解偏差。
看起來當僅在整個白天時間獲得觀測時,日間恆星濾波改良精確度。當在白天時間期間採取僅僅幾個觀測時精確度之改良係最顯著。相比於正常解精確度之量值,日間恆星濾波取決於每年重複的緩慢移動偏差之量值而可或可不顯著改良準確度。正常解精確度之量值當然至少部分取決於在白天時間期間獲得的觀測之數目。
總而言之,吾人看到對於吾人之唯一間歇觀測情境由於使用恆星濾波而增加益處,另外若觀測不間歇,則間歇
觀測將對吾人不可用。另外,因為吾人之節點甚至在白天時間期間工作循環,因此相比於在吾人在整個白天時間連續獲得觀測的情況下吾人將獲得的益處,吾人自日間恆星濾波獲得更多益處然而,當僅使用白天時間觀測時,吾人亦觀測使用吾人之日間恆星濾波形式不可縮減之一年一次重複的緩慢移動解偏差。此緩慢移動偏差影響準確度而在短時間段內其似乎為固定偏差。
吾人現在繼續校驗當在使用真實壽命觀測的情況下間歇地獲得觀測時日間恆星濾波確實改良解。
3.3.1模擬驗證
對於基於吾人之多路徑模型的模擬,吾人已看到,對於吾人之特定唯一硬體,觀測僅僅在白天期間且甚至接著僅僅間歇地可用,吾人預測吾人之解應採取圖3.10中看到的結果。首先,吾人預測恆星濾波器應即刻對節點位置之改變作出反應且解應匹配於所進行的實體位移之改變。其次,吾人預測吾人當間歇地獲得觀測時使用此章中描述之日間恆星濾波確實獲得每天解精確度之改良,且當使用連續高速率觀測時不可得到改良。第三,應存在吾人之日間恆星濾波不可縮減之將每年重複一次的解偏差之緩慢改變。第三預測吾人可不校驗,此係因為其將需要靜態節點之多於一年的觀測。第四,當使用比許多白天觀測更少的白天觀測時,任何改良更顯著。第四預測吾人此處不驗證。
前兩個關於回應及改良之預測吾人驗證如下。
3.3.1.1 恆星回應
運用如第5章硬體中所描述但經修改成關斷連續電力供應器之節點運行實驗。天線置放於屋頂上且接收器安裝在屋簷下方避免直射日光及元件影響,基準為大約10m。運用連續功率,有可能獲得最高可能準確度,且判定恆星解當節點之基礎移動改變時是否瞬時移動,另外,判定恆星解之改變是否與基礎移動一致。節點之天線在NNW方向中且稍微向下移動;首先20±2mm且接著5±1mm。使用日之每一曆元,相對於計算解所針對的日,標繪解之主要主分量。圖3.14展示此繪圖,其中恆星濾波器具有15日之移動窗時間段。

節點之天線大約在第357日之中午移動;此可在上圖3.14中看到,此係因為既不在如在之前位置處獲得之一些雙差之-0.01處亦不在如在之後位置處獲得之其他雙差之0.01處的點,造成最終解既不為前者亦不為後者。在第368
日下午7點處進行5mm移動。如可看到,恆星濾波器對如所預期之移動瞬時回應,但不同於模擬,對於類似2cm移動之較大移動,恆星解低估移動且緩慢調整至新的位置。此係有意義的,此係因為多路徑隨位置而變,因此,用於恆星解之先前日具有稍微不正確多路徑資訊。為了模擬,吾人假定多路徑獨立於位置,因此為何吾人未在圖3.10中看到吾人在圖3.14中看到的恆星解之緩慢線性上升。對於5mm運動,恆星濾波器在2cm移動之前不具有足夠時間捨棄全部觀測,當在5mm移動之後計算第一恆星解時在進行2cm移動之前吾人使用4日。自圖3.14,吾人藉由在進行移動之前檢查恆星解及在進行移動之前獲得方位之估計而估計恆星解之移動的量值;按時間次序,此等值為-9.9±0.2mm、8.0±0.4mm且12.6±0.2mm,具有95%可信度。自此,吾人估計第一移動為17.8±0.6mm而第二移動為4.6±0.6mm,兩者具有95%可信度;因此,兩者估計與自使用尺子獲得的估計一致。對於在此特定試驗位點處在短暫時間框內的相對較小移動,此至少展示盡吾人所能可判定的恆星解與GPS天線自身之基礎移動一致。
3.3.1.2 恆星解改良
全部吾人之靜態真實壽命觀測之試驗係相對短暫的,持續不大於幾個月。此意謂吾人能夠看到解之高頻率而非低頻率。此意謂吾人可僅僅觀測解精確度改良而非準確度改良。當然,吾人預測之上述情形係日間恆星濾波將展示清晰改良的情況。
根據吾人之多路徑模型,當每日使用相同曆元以獲得解時(諸如當使用永久供電GPS接收器取得高速率觀測時)獲得的解,日間恆星濾波應不具有效應。然而,自圖3.14來看,此似乎並非如此。若吾人僅考慮2cm移動之前及在5mm移動之後的日,則吾人看到大約30%之2DRMS的改良。吾人推理吾人在吾人之模擬中並未預測的此改良可係由於衛星重複週期並非確切為24小時246秒而實際上對於每一衛星係不同的,從而造成雙差之多路徑並不完全每日重複的事實。當使用來自永久供電接收器之全部觀測時,繪製解之前兩個主分量,獲得圖3.15,其中可更清晰地看到此改良。
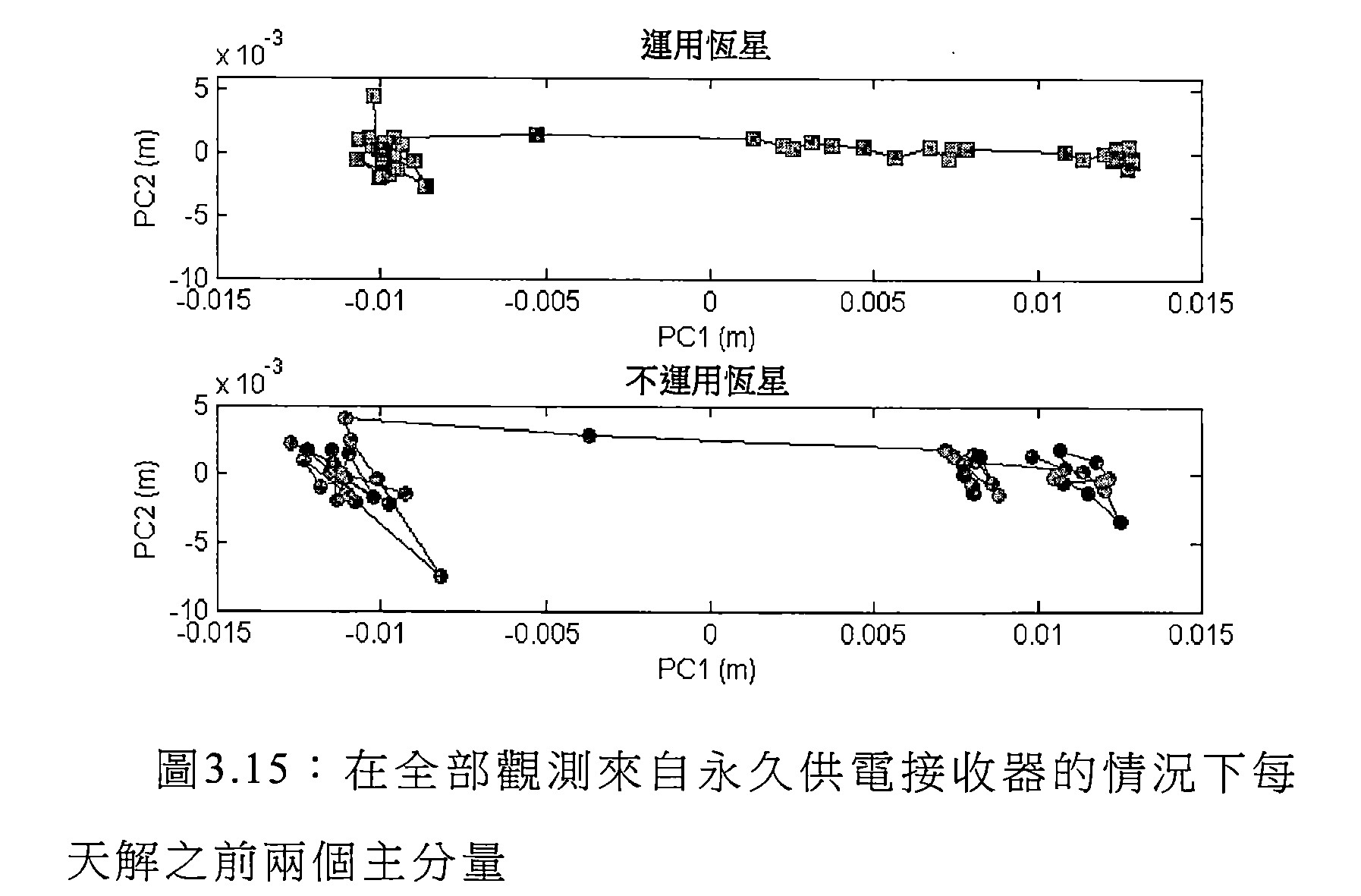
為了研究在觀測不連續時的改良,吾人使用自連續供電節點獲得的觀測且僅僅選擇具有與在附近置放的太陽能供電GPS節點相同之時間的觀測。因此,永久供電觀測之
作用中的分佈將匹配於自太陽能供電GPS節點自身獲得之觀測的分佈。以此方式,吾人消除位置對改良之可能相依性。再次,僅考慮在2cm移動之前及在5mm移動之後的日,在此狀況下,吾人獲得大約60%之2DRMS的改良。此改良為當一秒一次地連續獲得觀測時獲得的未預期改良之雙倍。在太陽能供電GPS接收器節點獲得觀測的情況下,當僅僅使用來自永久供電接收器之觀測時,繪製解之前兩個主分量,吾人獲得可看到此改良之以下繪圖。

如自此等圖(3.15及3.16)兩者可看到,使用恆星濾波產生彼此相當類似的解。在第二圖(3.16)中在不使用恆星濾波之情況下的5mm階躍不可被容易地判定而當使用恆星濾波時其易於判定。視需要,在白天時間期間當使用間歇觀測時的改良顯著大於當使用永久供電GPS接收器時獲得之改良。
最終,對於置放於Paekakariki試驗台處且保持22天的實際太陽能供電GPS接收器,吾人比較恆星解與非恆星解。此GPS接收器節點為如第5章中所描述的節點。可在第68頁上之圖3.17中看到解之鳥眼視圖。

如可看到,恆星濾波對解精確度有顯著效應。獲得自5.6mm至2.8mm之2DRMS的大約50%之改良。僅僅使用在太陽能供電GPS接收器節點在作用中時取得之觀測的情況下的2DRMS之此改良百分比與在使用永久供電GPS接收器時吾人看到之改良相當。
3.4 天內恆星濾波
天內恆星濾波解(天內解)為使用除了在自身所討論之秒中觀測以外在其他日中之觀測的基於曆元之解;其他日可未必為連續日。
天內恆星濾波並非為吾人之主要關注,此係因為吾人
之系統並不與諸如RTK之即時系統競爭。另外,進行使用每天解集中於長期地面變形量測的決策並很好進行此決策。然而,不存在吾人之系統為何不可擴展至基於曆元之解的原因但將需要更多工作來研究此類型解。在該章節中,吾人使用過去資訊及當前曆元來計算解而簡單檢查天內解。
計算天內演算法之多路徑估計係藉由使用先前日而進行,其中節點之位置不變,吾人具有先前日之日間恆星解。此等日間解係非常準確,其中殘餘主要由多路徑組成且因此吾人可計算彼等先前日的多路徑。吾人具有的此多路徑資訊接著使用簡單幾何平均化而組合以建立多路徑映圖,吾人可將當前日之任何雙差校正成多路徑映圖。吾人使用有偏位置將雙差變成殘餘,校正殘餘,接著將此等轉換回雙差(最小平方可用於雙差),而非校正雙差自身。此經如此進行,以便避免使用如在日間恆星濾波演算法中進行的經解開雙差值。假定吾人具有真實多路徑M之估計為M',最初對於經解開雙差,此程序經概括如下。
˙ 對於第n日針對位置PB的殘餘之定義
對於第n日針對位置PB的殘餘之定義
˙ 使用多路徑映圖以校正殘餘
使用多路徑映圖以校正殘餘
˙ 代入Φ之模型
代入Φ之模型
˙ 將△M n 定義為多路
的今天之實際與昨天之估計之間的多路徑映圖誤差
將△M n 定義為多路
的今天之實際與昨天之估計之間的多路徑映圖誤差
˙ 若良好多路徑映圖且雜較小,則近似
若良好多路徑映圖且雜較小,則近似
為了獲得多路徑估計M',幾何平均化歸因於簡單實施方案而使用並概括如下。
˙ 位置
位置 之殘餘的定義若接收器在第n日不移動,則此殘餘接近於多路徑。
之殘餘的定義若接收器在第n日不移動,則此殘餘接近於多路徑。
˙ 用於預測明天之多路徑的幾何平均化。
用於預測明天之多路徑的幾何平均化。
因此,兩個方程式用於吾人之天內恆星濾波;基於昨天之多路徑估計的經校正方程式及多路徑估計之更新方程式,此等兩個方程式為方程式(3.15)及(3.16)(並非基礎)。

吾人改為選擇使用包裝殘餘以便避免如吾人在日間恆星濾波中進行的循環滑移,而非使用解開殘餘。在使用包裝殘餘後,就可如以下演算法中所列出而描述吾人之演算法。

3.4.1天內恆星濾波改良
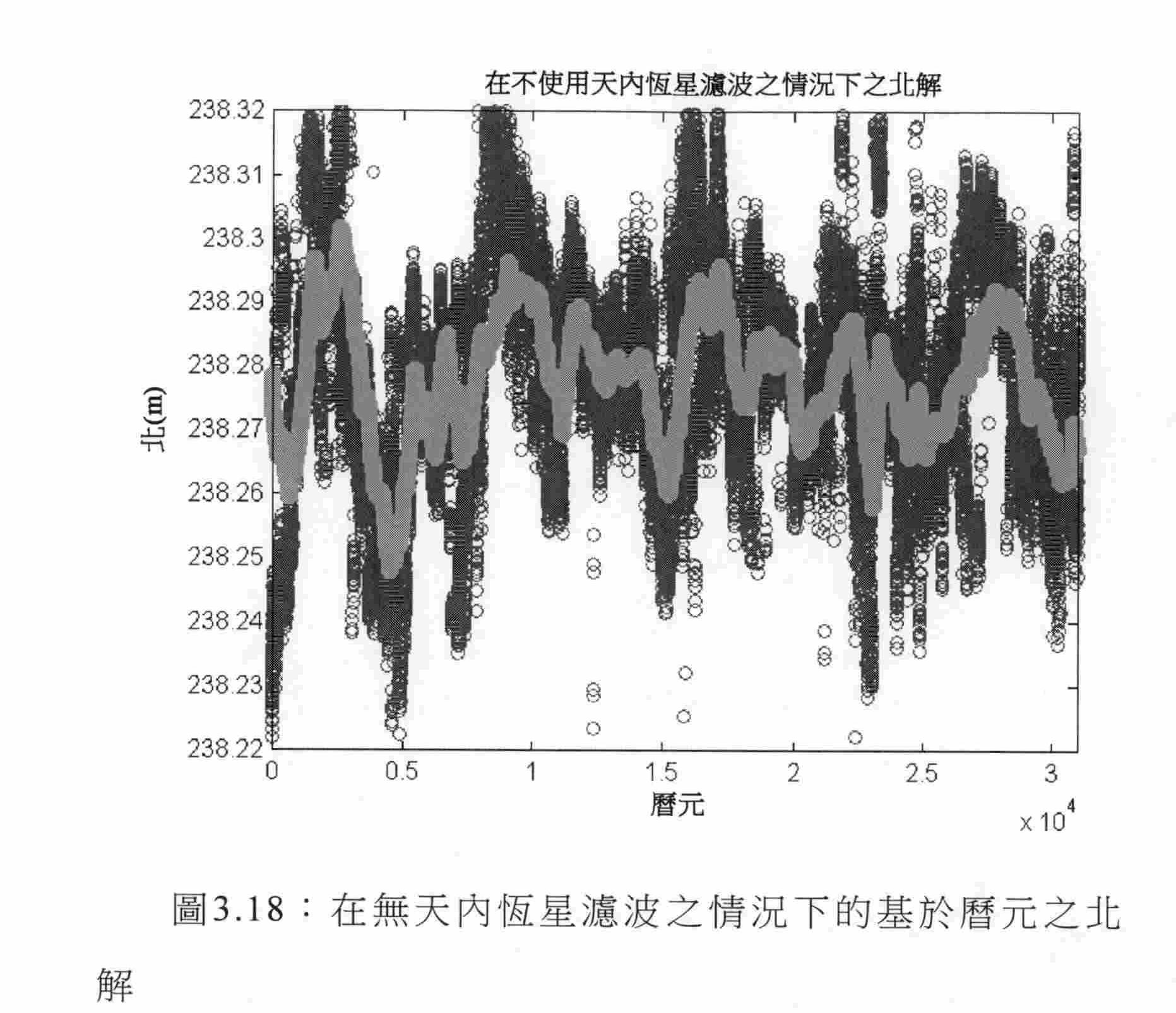
吾人將基於曆元之解與或不與天內恆星濾波比較。下圖3.18展示在不對藉由如硬體章-硬體(Hardware)中所描述的吾人之無線太陽能供電GPS接收器節點自廬山試驗台獲得之觀測進行天內恆星濾波之情況下的基於曆元之解。不處理具有不充足方程式及/或過多方位精確度因子(PDOP)之曆元之解。另外,對解進行卡爾曼平滑,其中模型為靜止球形及自LS解採取為( )-1之量測共變數。因為硬體為間歇的,所以在日期間的解之僅僅分率可被計算,從而產生其中不可計算解的許多秒。由此(此等),所以x軸僅僅表示其中可計算解的曆元,圖展示結果3.18。
)-1之量測共變數。因為硬體為間歇的,所以在日期間的解之僅僅分率可被計算,從而產生其中不可計算解的許多秒。由此(此等),所以x軸僅僅表示其中可計算解的曆元,圖展示結果3.18。
下圖3.19展示如用於圖3.18但實際上運用天內恆星濾波之相同觀測。演算法預先具有10日以調整其多路徑映圖。

如可看到,多路徑效應已在每秒基礎上顯著縮減。對於解自身,觀測到2DRMS準確度的大約60%之改良,而一旦經由卡爾曼濾波器運行解自身就觀測到大約80%之改良。對於此測試,2DRMS精確度量測列表於下表(表3.1)中。

3.4.2天內恆星濾波回應
3.4.2.1 5mm永久功率
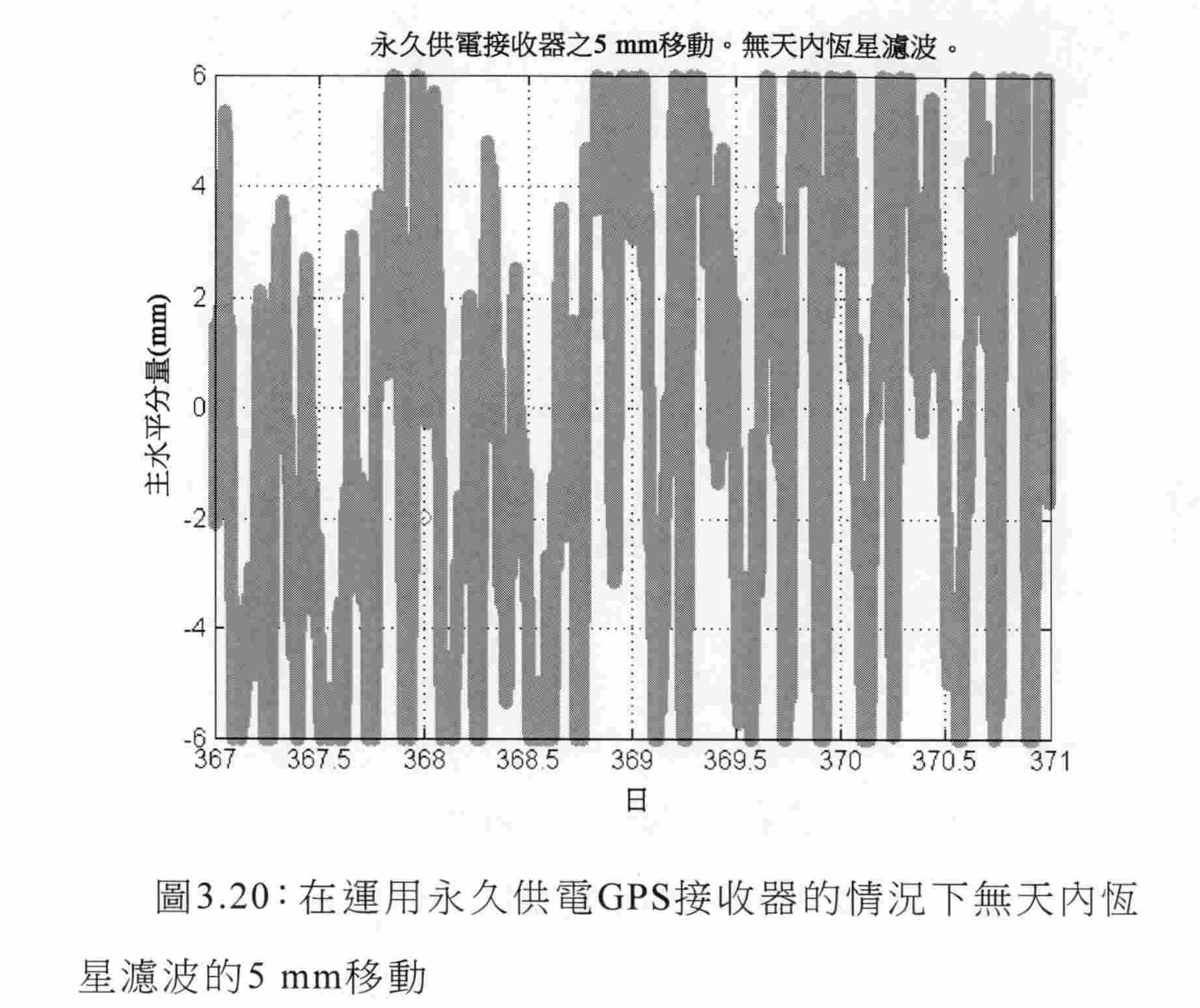
首先使用如章節3.3.1.1中看到的永久供電GPS接收器
之5mm移動檢查天內恆星濾波對於移動的回應。首先,在運用應用於解之一小時移動平均濾波器情況下在圖3.20中標繪在四日內之在無天內恆星濾波之情況下的移動之主要水平分量。
再次相同地但在α為0.25之情況下藉由添加天內恆星濾波而處理相同資料;可在具有與先前圖(圖3.20)相同之標度的圖3.21中看到結果。
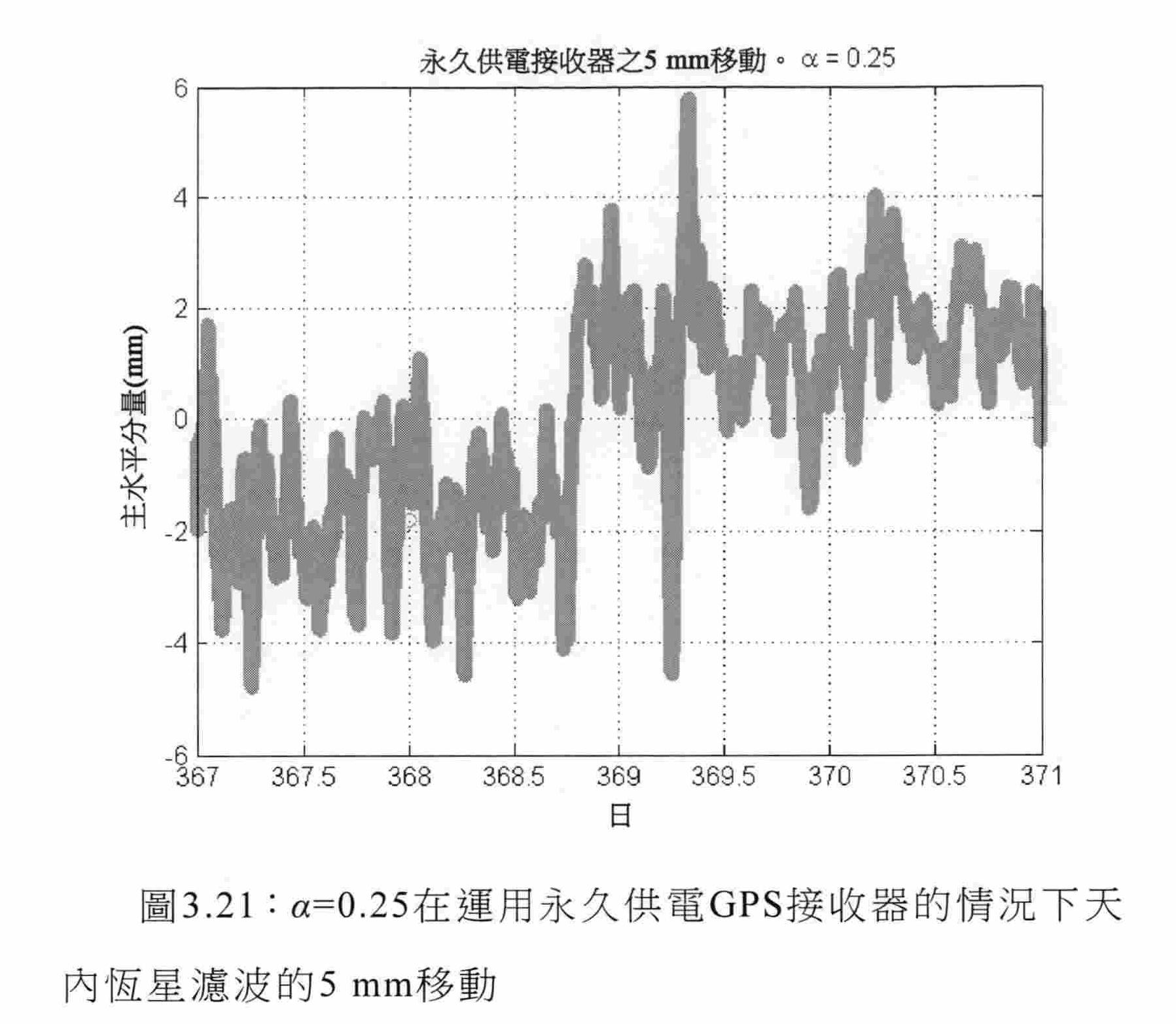
如可看到‘在無天內恆星濾波之情況下,非常難以判定移動已發生,而運用天內恆星濾波,可更容易地偵測移動。藉由圖3.21判定如在1月3日之下午6點與下午8點之間的移動之時間,而實際移動之時間係在1月3日的下午7:10。
對圖3.21進行核心密度估計(KDE),獲得圖3.22。

圖3.22展示移動為大約3.2mm。如由傾角儀所量測的屋頂之坡度為15°,因此總移動應為離5mm之期望值1.7mm的3.3mm。
最終,再次進行天內恆星濾波,但此次使用為1之α值。可在圖3.23中看到此之結果。

圖3.21與圖3.23之間的差為脈衝回應。可在圖3.23中看到,在移動之後恰好一天存在圖3.21中並不顯著的尖銳谷。此如當α=1時用於獲得多路徑估計的僅僅前一日所預期且當獲得該多路徑估計時的要求係在彼日中節點靜止,此顯然並非當節點移動時之狀況。當α=0.25時,較少多路徑估計係基於前一日且因此為何吾人不注意在圖3.21中之實際移動之後的一天的任何谷。
3.4.2.2 2cm太陽能
在紐西蘭之Paekakariki試驗台處進行在四天內使用太陽能供電節點之階躍回應測試。第一日係記錄多路徑映圖,第二日係確保多路徑減輕成功並獲得控制,第三日係
其中節點被移動,且第四日係監測天內恆星濾波器之回應。為1之α用於天內恆星濾波演算法,此意謂有限脈衝回應且在階躍之後僅僅一日將需要看到任何類型之回應。
節點之移動係在大約北方向中且如藉由尺子所量測之移動為大約2cm。在2014年12月5日之上午11:06進行移動。使用天內恆星濾波演算法,看到在大約上午11點開始並在下午12點完成的線性移動,但因為解僅僅係間歇的因而難以判定。因為移動係瞬時的,因此吾人可以說線性移動之第一跡象應在如由吾人所引起的實際瞬時移動處或在進行如由吾人所引起的實際瞬時移動之後。因此,吾人自天內恆星濾波演算法判定瞬時移動發生在與如由吾人進行之實際移動一致的大約上午11點。
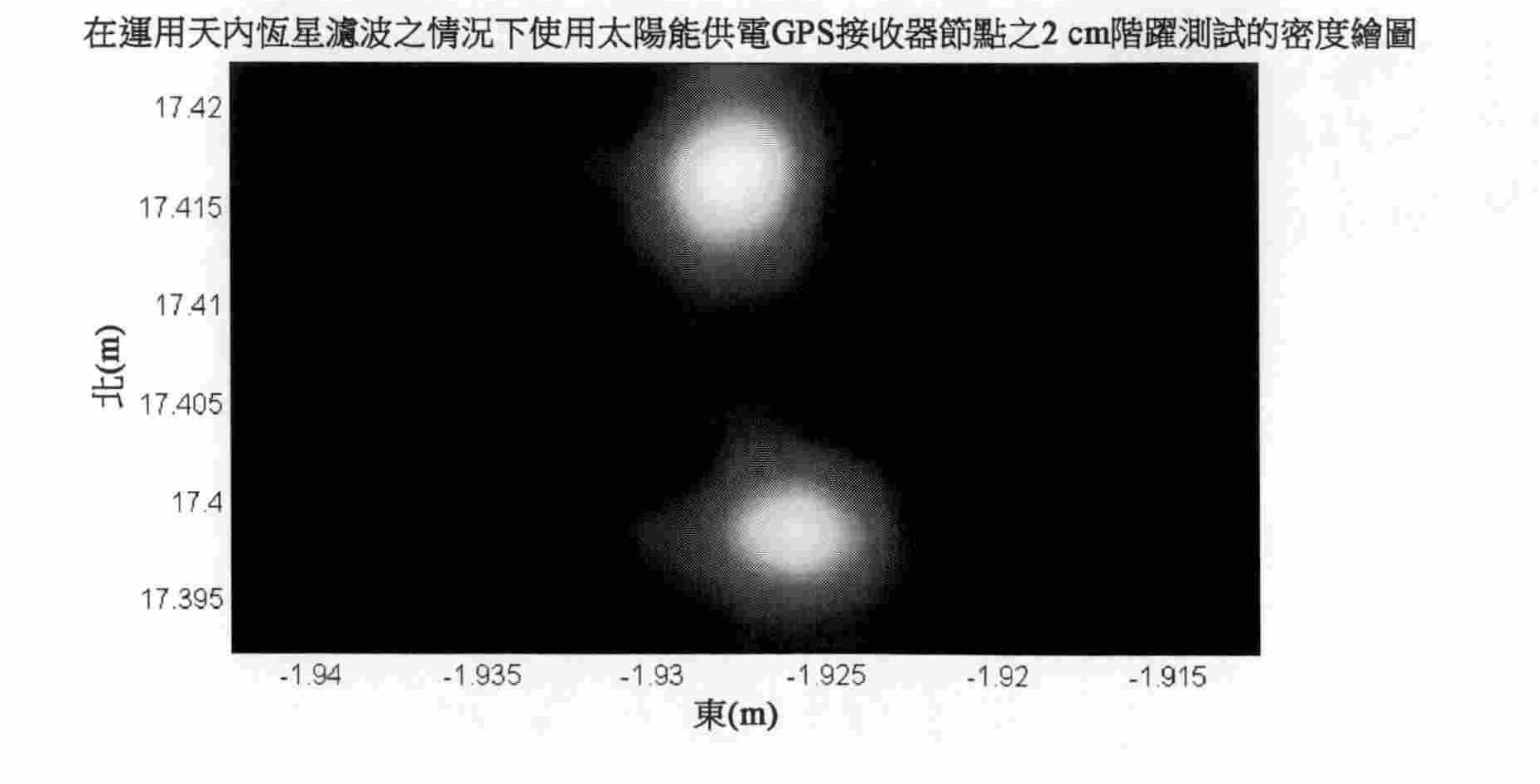
圖3.24展示在第二至第四日(包括首尾)內的解之密度。如可看到,存在在幾乎正北方向中之清晰移動;如自下圖3.24量測的兩個位置之間的位移為大約1.8cm。此位移稍微小於如使用尺子量測的2cm。
下圖3.25展示關於進行移動時之時間的水平解之主要主分量。
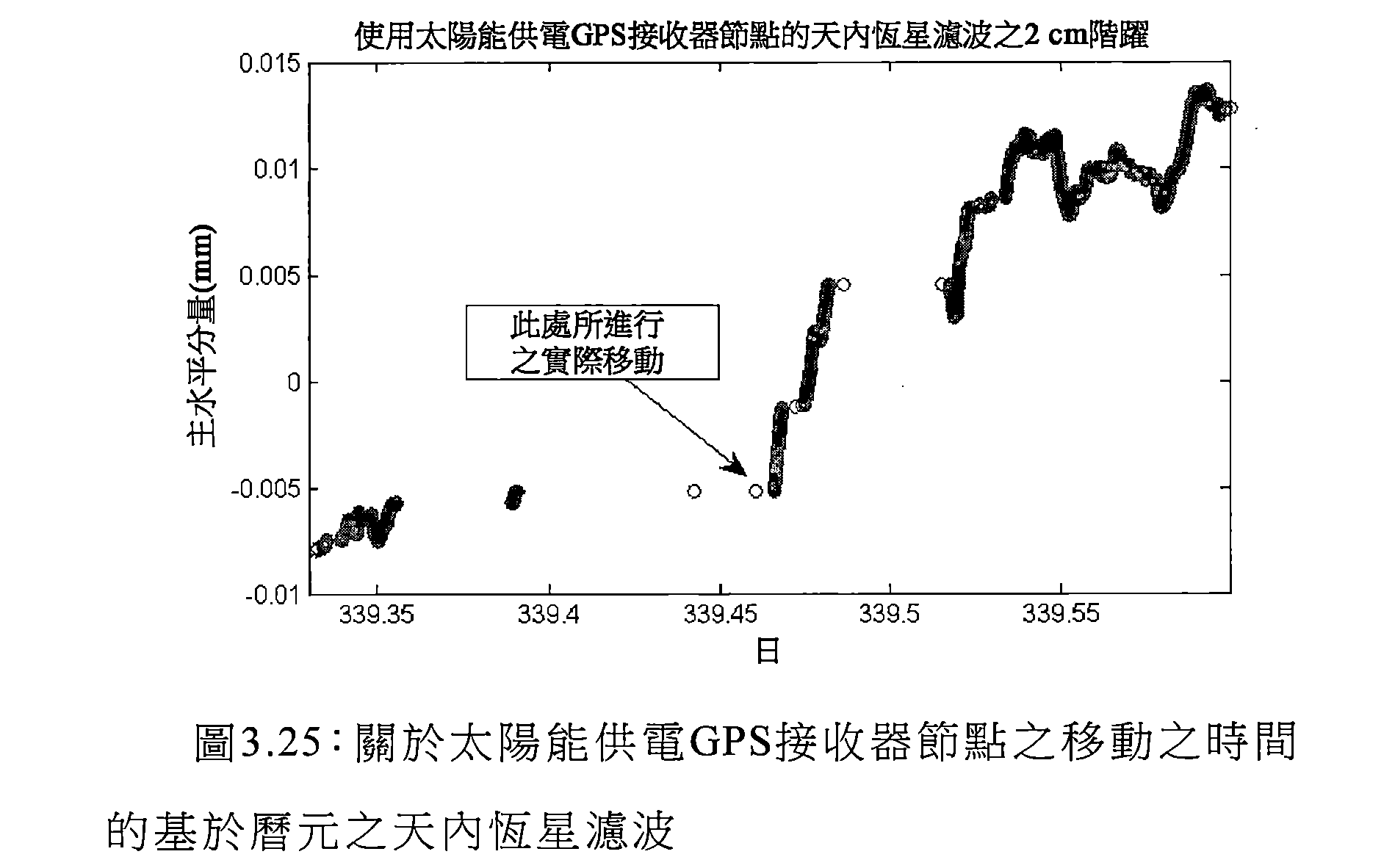
如可看到,使用太陽能供電GPS接收器之間歇性質意謂若移動在GPS接收器並未接通或主動地獲得適用之觀測時發生,則直至在GPS接收器再次變得在作用中且獲得足夠數目個觀測之後移動才將被量測。
下圖3.26展示全部四天內的水平解之主要主分量。

作為比較,在不使用天內恆星濾波之情況下,第2日至第4日(包括首尾)之解的密度如前在圖3.24中但在無天內恆星濾波之情況下被標繪;此可在圖3.27中看到,其中繪圖之標度與圖3.24中相同。如在此狀況下可看到,不可能判定兩個位置。

演算法比較
4.1 網路頻寬比較之縮減
GPS接收器輸出以下各者以用於精確度應用;L1虛擬距離可觀測量、L1相位可觀測量、L1多普勒可觀測量、L1信號強度可觀測量、失鎖識別符、品質識別符、衛星數目,及如藉由接收器之時脈給出的觀測時間。通常,發出更大量資料。雖然並不需要全部用於高準確度解,但虛擬距離、相位、衛星編號及時間將被視為某種高準確度解所需要的最小需求。
資料大小之典型分解將為:虛擬距離、相位及時間全部為八位元組值;多普勒為四位元組;信號強度為一位元組;失鎖識別符為一位元組;品質識別符為一位元組;且衛星編號為一位元組。
對於一曆元,通常一次將僅僅發出對不同衛星之n多個觀測。表4.1展示在此情形下發送的位元組之數目的分解

雖然對於一個曆元n可在任意處為0至32,但典型值將
介於4與10之間。假定10為上限,此將每一節點一秒產生高達248位元組。
低功率無線網路解具有相對緩慢資料速率,從而限制通道容量。此部分地歸因於較慢資料速率意謂對於相同數量功率及相同調變方法之較大傳輸距離的事實。另外,節點之較少頻寬要求產生較低曆元資料丟失,因此減輕有損通道之效應。因為通道容量、功率使用及曆元丟失,最小化節點實際上發送的資料量係有利的。較少頻寬要求之另一優點為更多節點可佔據通道,從而在給定通道上增加網路中之節點的數目。
為縮減來自GPS接收器自身之資料量,CFFS演算法中之一些係實施於節點自身上,因此改變經由RF鏈結發送之資料。演算法2.1為在節點上運行之演算法。
外推之包裝相位可觀測量、衛星編號及秒對準時間為傳回之主要變數。另外,偶爾地傳回基於近似碼之解;此可如一日一次或兩次地不頻繁進行。此係如此不頻繁,以致其對所需要頻寬無有效貢獻且可被忽略。
演算法之主要部分經由網際網路或某一其他機制對時間有近似瞭解且節點區段已將時間對準至秒。若吾人假定演算法之主要部分知曉一分鐘內之時間,且演算法之節點區段與主要區段之間的潛時亦小於一分鐘,則演算法之主要部分有可能在節點區段僅發送時間之模256版本之情況下計算觀測之時間。因為此等時序要求非常容易達成,因此需要每曆元僅僅一個位元組在演算法之節點與主要區段
之間發送。
包裝之相位可觀測量移除相位可觀測量之整數部分且留下零與一之間的數目。此將需要一之分率之準確度的約20,000之數目轉換至需要一之分率的約一之數目;此意謂吾人僅僅需要幾個位元組以恰好準確地編碼剩餘資訊且出於吾人之目的2位元組應係足夠的。2位元組意謂吾人具有約65,000分之一的相位解析度。
下表展示可發送用於CFFS演算法節點的位元組之絕對最小數目之分解。
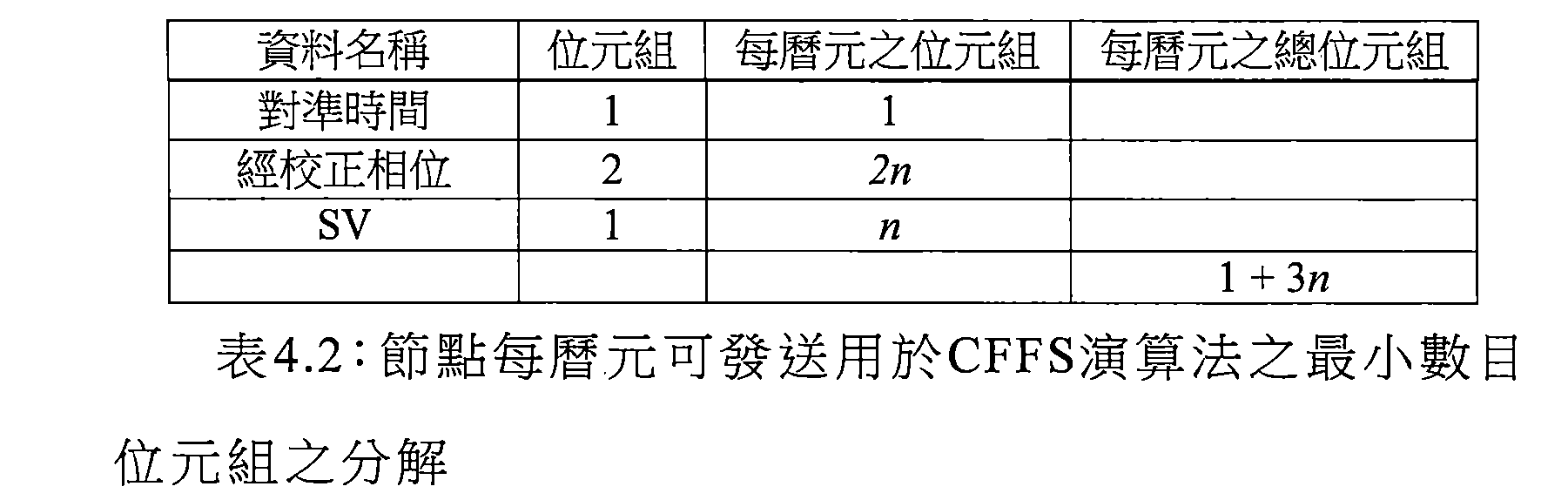
如前所述,假定一個曆元中之10個衛星的上限,此將每一節點一秒產生高達31個位元組。對於相同給定曆元速率,此等於所需要頻寬之87.5%縮減。
4.1.1頻寬比較之真實壽命縮減
設計及實施使用低功率無線電之藉由小太陽能面板及無電池供電的低成本GPS接收器節點。無線電鏈路並不具有封包丟失校正,封包係使用廣播方法而發送但若封包未到達,則其將不被再次發送。GPS接收器自身為單頻帶Ublox LEA6T而所使用之天線係25mm貼片及20mm螺旋天線。接收器在冬季置放在外面具有大量環繞樹及建築物之地面上。節點歸因於年時及高樹不接收直射日光。太陽
之最大仰角在正午為27°且白天長度為9.5小時。在白天之此等9.5小時期間,節點平均能夠使其GPS接收器接通大約20%時間(約一日2小時)。接收器遠離節點大約10m置放並收集資料。永久供電參考接收器用以最大化節點之重疊曆元;此置放在屋頂上。
進行兩個實驗,第一實驗係其中如表4.1中之全部典型資料在大約一週內傳回(「典型資料」),及另一實驗係其中係其中除了信號強度及一些除錯資訊以外的如表4.2中之來自節點演算法的輸出在大約兩週內被傳回(「節點演算法資料」)。經由無線電鏈路發送曆元丟失以及每曆元之位元組,其中比較節點傳回「節點演算法資料」情況與節點傳回「典型資料」情況;其結果係在中下表概述。

與估計之87.5%相比僅僅74%資料的縮減的原因係歸因於增加之信號強度及被添加至「節點演算法資料」之除錯資訊。
與正常輸出資料相比,當使用「節點演算法資料」時,存在頻寬之大約74%縮減及曆元丟失之46%縮減。因為「節點演算法資料」係來自已經由CFFS演算法部分地處理的觀測,所以資料將不能夠由典型GNSS封包使用。「節點演算法資料」為經設計用於CFFS演算法之中間資料,其為演算法自身之積分部分。
4.2 解比較
準確度及精確度可令人混淆。詳言之,準確度難以量測且藉由在每日說話中之字的共同模糊使用率使敏感之主題變得更糟。下圖展示針對藍色解集合相對於紅色真解的精確度與準確度之間的區別。黑色圓表示量測集合之精確度位準而黑色圓之中心與紅色點之中心之間的距離表示量測集合之準確度‘

精確度可自解集合容易地估計,準確度為完全不同事項。如[48]中所指出,對於準確度而言,在內部計算並不常見,其中解係在長時間段內獲得,使得其採取正態分佈形式並假定此分佈之平均值匹配於真解。此假定並非必需有效。如吾人在多路徑章節3中看到,多路徑造成固定解偏差,即使在整日中連續採取觀測仍存在固定解偏差,且此
偏差至少在模擬中一日至下一日不改變。不可避免地系統誤差造成蠕變至解中之偏差。對於許多應用,此將並非係問題,此係因為無論如何皆不改變的固定偏差僅意謂你始終量測你的設備之不同點。然而,多路徑引起方位相依偏差,若GPS接收器移動,則此偏差相對於解之平均位置改變,因此使在足夠大時段內採取的正態分佈解之平均值匹配於真解的假定無效。量測真實位置需要外部計算準確度,此意謂使用具有較好準確度之某一其他裝置。此超出此論文之範疇,因此吾人僅僅考慮近似內部準確度評估。如[48]所說,「記住任何給定GPS量測可由以下方程式表示:量測=確切值+偏差+隨機誤差。隨機誤差分量呈現針對內部及外部評估兩者之大致相同問題。然而,偏差需要用於偵測之外部真值。不存在藉由僅僅研究經移位資料集自資料集中之真值偵測恆定移位之容易方式。」。
雖然很可能難以量測,歸因於多路徑引起的偏差,但運用高品質GPS天線在低多路徑環境中使用24小時觀測最可能產生部分歸因於環境及裝備,及亦部分歸因於獲得瞬時多路徑偏差之平均值的24小時觀測的小偏差。在此狀況下,內部獲得準確度很可能相當接近於實際準確度。然而,對於吾人之應用,吾人具有不具有扼流環之不良未經校準之天線、高多路徑環境,及歸因於多路徑且僅僅能夠獲得白天時間觀測所造成的偏差之每年預測之循環。此意謂可靠地內部計算準確度係非常困難且潛在地更不準確。如第3章預測的每年解偏差循環特別地使準確度估計非常困難,
此係因為將需要至少一年有價值觀測來考慮每年解偏差循環。
在無某一類型量測之情況下,準確度及精確度係無意義的。準確度及精確度量測通常係解將在某一給定大小之某一形狀內的機率。一般而言,所使用形狀係圓或球體且概率自50%向上。2D水平(北東向)似乎係很可能最常給予的,此係因為與向上方向相比,GPS解在此平面中往往會更精確,且在此平面中相當地對稱。下表定義三個非常常見量測,其中CEP DRMS及2DRMS係針對2D水平面且SEP係針對全部三個維度。對於一個維度,通常使用向上方向RMS。

下表展示吾人用以計算此等量測的近似計算,其中σ N 、σ E 及σ U 分別為在北東及向上方向中的解之標準差。此等公式係自[26]獲得。

吾人在此論文中僅僅考慮內部準確度且當吾人討論解之準確度時,吾人意謂吾人已自充分大數量的解之樣本獲得群體之標準差的估計,吾人希望此等解之平均值與真解相同且已計算如前一表中之準確度。對於解精確度,當吾人通常處理每天解且僅僅能夠一日計算一解時,解之精確度意謂如當解之低頻分量已被移除從而僅留下高頻分量時使用在不大於幾個月之一時間段內或在更長時間段內採取的解集自前一表所量測之精確度。
4.2.1比較方法
吾人設計被稱為JAC-MM及JAC之兩個程式。JAC-MM實施CFFS演算法,而JAC實施除了恆星濾波階段以外的CFFS演算法。若吾人假定遠端GNSS接收器設置與電力網隔離並經由無線鏈路連接至使用者,則若吾人縮減硬體及部署之成本及功率要求,則使用者將最可能獲得較少類型之觀測,或多或少間歇觀測,增加之多路徑,增加之PCV,及大體上較不良品質資料。接著繼續存在的問題係有可能仍獲得準確/精確靜態解且若如此則該等準確/精確靜態解之準確/精確程度很可能將如何。就此而言,吾人將不預期當前GNSS軟體進行特別好的工作,此係因為設計軟體之人可能假定可得到連續高品質資料。因此,吾人經由JAC及JAC-MM運行不同類型修改之觀測並比較此等靜態相關解與經由開放源GNSS套件RTKLib[11]及GPSTk[8]運行的相同修改之觀測。使用RTKLib及GPSTk,此係因為此等係支援吾人發現的基於單頻帶相位之相對方位解的可免費得
到之僅有兩個開放源GNSS套件。日復一日地獲得靜態解。
除了多種其他解類型(諸如RTK、精確點定位(PPP)、差分GPS(DGPS)、單一、固定等)以外,RTKLib亦進行靜態解。支援單頻帶及雙頻帶接收器兩者。對於在小於10km之短暫基線上的靜態解,使用某一形式之擴展卡爾曼濾波器及雙差[52](第161頁)。
GPSTk其中具有稱為DDBase之能夠使用僅僅單頻接收器計算靜態解及亦使用雙差的應用程式[35]。
JAC實施CFFS演算法但在不運用恆星濾波。因此,JAC計算之全部每天解僅基於在正如RTKLib及GPSTk所在之彼日內獲得的觀測。此允許三個程式之間的有意義之效能比較。
恆星濾波使用來自先前日之資訊以計算解且因此與JAC GPSTk及RTKLib作比較並不公平。恆星濾波演算法可附加至此等三個程式中之任一者以獲得較高準確度/精確度之解。然而,吾人將恆星濾波之實施方案附加至JAC程式,以便看到恆星濾波與其他三個程式相比具有的效應;具有附加恆星濾波之此JAC程式稱為JAC-MM且為如第2章中所描述的吾人之CFFS演算法的完整實施方案。
4.2.2連續高品質資料
此子章節之目標係展示CFFS演算法的吾人實施方案產生與在良好品質條件下之預先存在解處理程式相當的解。對於最初效能測試,吾人使用自GPS接收器獲得之兩月高品質資料,第一GPS接收器定位在Te Papa博物館且第
二GPS接收器定位在惠靈頓機場。此資料係自陸地及資訊紐西蘭(LINZ)之RINEX資料存檔獲得[5]。資料速率為每30秒一個曆元。此等兩個接收器之間的基準為約4km。兩個接收器為Trimble NetRS[12]而天線係不同的,一者為LEIAT504且另一者為TRM41249.00。資料藉由GeoNet計劃供應至吾人。接收器及天線之此等類型為高端雙頻帶。如藉由資料表給出的此接收器之靜態解準確度針對水平方向為5mm+0.5ppmDRMS,且針對向上方向為5mm+1ppm RMS,其中ppm係指基準長度。此意謂資料表暗示如藉由接收器自身計算之靜態解針對水平將為14mm 2DRMS。功率消耗係介於3W與4W之間。
為了公平比較,當吾人之演算法意欲僅僅處理單頻帶GPS接收器時,首先藉由剝除精確P代碼以及L2頻帶觀測而修改觀測,以便僅留有C1、D1、S1及L1觀測類型及廣播導航資料;此等類型觀測對於低成本低功率單頻帶GPS接收器係典型的。
DDBase歸因於不能夠正確地讀取導航檔案而在第六天失效,而不管此等檔案係自IGS產品獲得[27]。GPSTk及JAC兩者獲得全部天之解以供處理。圖4.2展示解之鳥眼視圖而表4.6展示解之一些統計,其中NEU為北東上之縮寫。亦包括JAC-MM解。
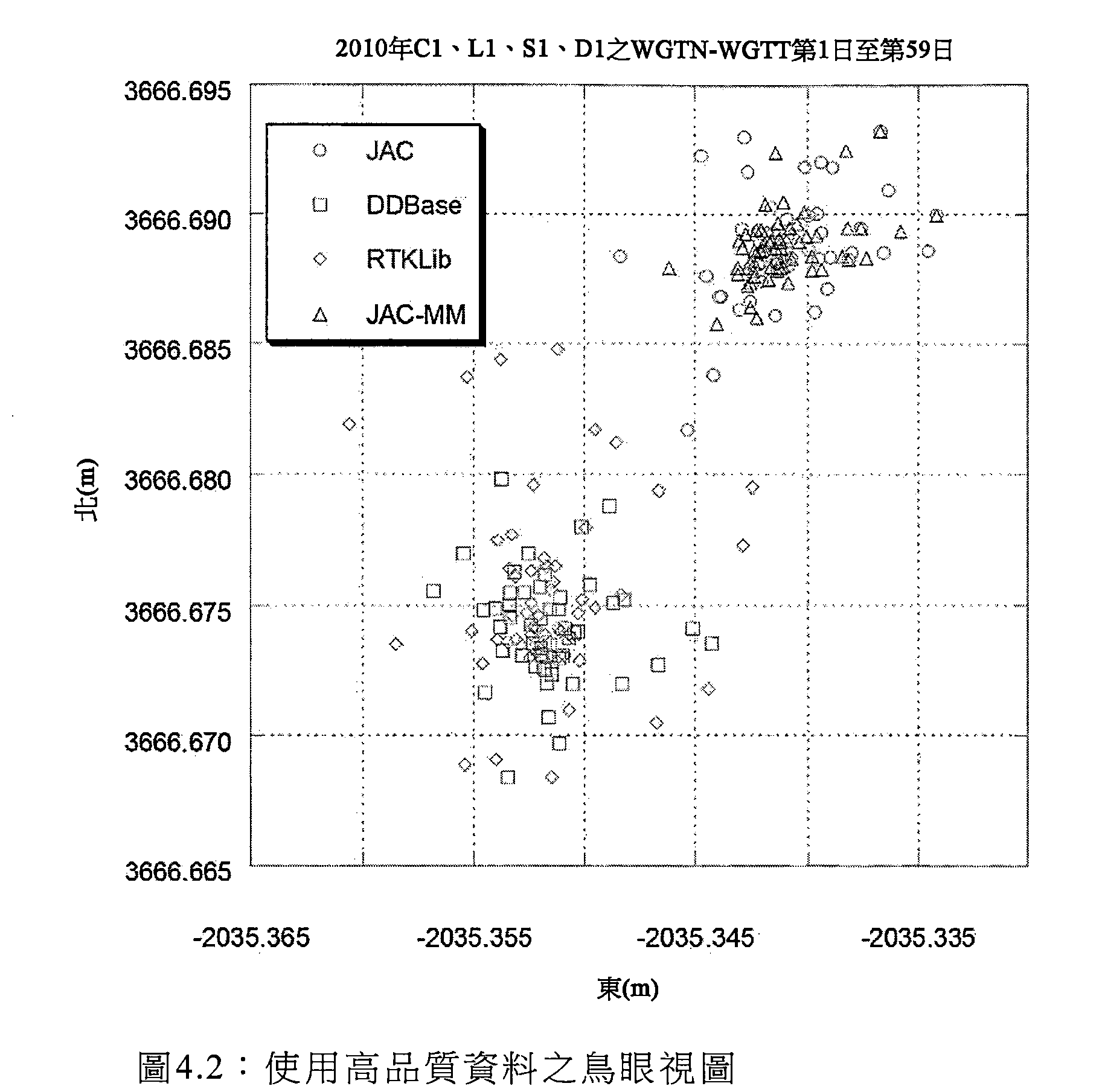

如可看到,全部程式產生具有相當精確度之解全部解之標準差類似。在水平面中,DDBase及RTKLib彼此平均起來在一毫米內一致,在垂直方向中RTKLib高於DDBase 1.6cm。JAC在垂直方向中與DDBase在8mm內一致而在水平面中,JAC不同於DDBase及RTKLib兩者大約1.8cm。JAC與DDBase差為20mm,JAC與RTKLib差為20mm且DDBase
與RTKLib差為16mm。準確度之三個量測係在下表中概述。

如已提及,JAC-MM使用來自先前日之資料計算解。因此,當直接與其他三個程式解相比時,JAC-MM解之結果係不公平的。然而,如所預期,JAC-MM之解比其他三個程式更精確。亦引起關注的係應注意,恆星濾波改良精確度而不管觀測僅僅具有每30秒一次之曆元速率。此係引起關注的,由於所需要的恆星移位意謂今天不存在如昨天存在的一對衛星之匹配觀測,此係因為246/30並非為整數。實際上,花費五天間隔出現一對衛星之匹配觀測。檢查數目,對於此資料,JAC-MM比JAC約多20%精確度。
當彼此比較時,全部程式具有範圍介於16mm至20mm之顯著解偏差。出於吾人之目的,吾人不關注不隨位置或隨著時間而改變的解偏差。使用三個不同程式造成的此等偏差是否隨位置或擴展時間改變,吾人不知曉。下圖展示在值得處理之此等兩個月內具有95%可信度球體之平均解。如可看到,其中無一者彼此一致。JAC-MM之球體並未標繪為在JAC之球體內。引起關注的係應注意,全部程式使用相同觀測但全部程式產生不同結果。全部程式產生非常精確結果。

4.2.3模擬間歇高品質資料
藉由使用如前所述之相同高品質Te Papa惠靈頓機場資料(但其中隨機地移除衛星觀測之50%)建立模擬間歇高品質資料。如前所述,經由JAC、DDBase及RTKLib運行資料。DDBase及RTKLib未能傳回任何解。圖4.4展示解之鳥眼視圖而表4.8展示解之一些統計且表4.9展示解之精確度的量測。
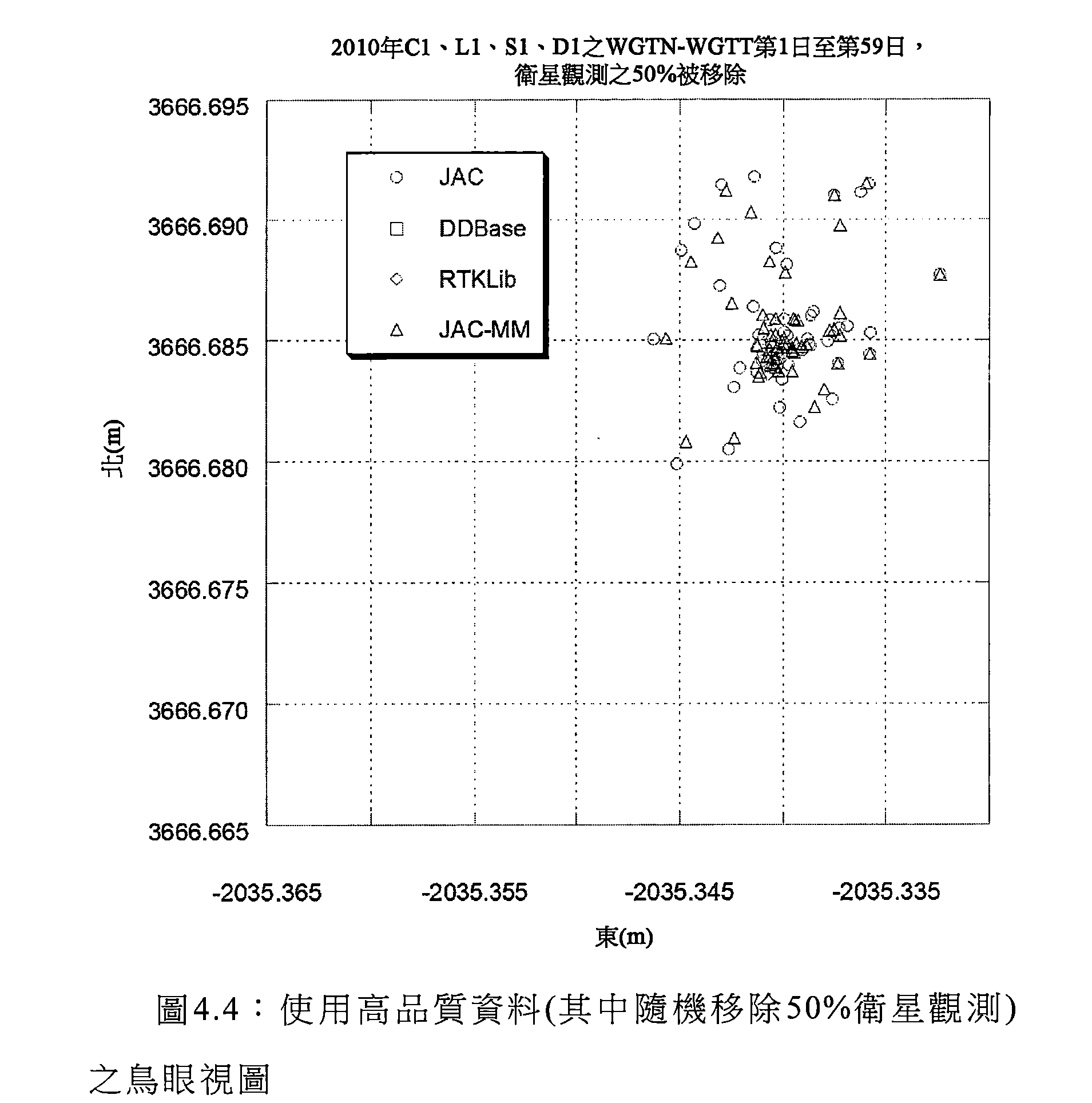


JAC之解幾乎與之前其中未移除衛星觀測之情境相同;平均位置為兩者之間的4mm差。如可看到,有效隨機地移除50%衛星觀測使JAC之解的精確度有極少差。
4.2.4使用真實壽命間歇不良品質資料之演算法效能
此子章節之目標為判定三個程式(JAC、DDBase及RTKLib)中之任一者是否可使用自吾人設計之GPS WSN節點獲得的真實壽命間歇不良品質資料獲得合理精確度之解。用以獲得曆元丟失之子章節4.1.1中使用的相同兩個實驗亦用以獲得真實壽命間歇不良品質資料。
CFFS演算法經設計為分佈式演算法,其中演算法中之一些係在節點自身上運行。此具有如子章節4.1.1中所看到之曆元丟失縮減的優點。在不考慮此之情況下比較CFFS演算法與DDBase及RTKLib將係不公平的。若節點僅傳回「典型資料」且CFFS演算法之節點區段將以非分佈式方式在基地台上運行,則與如表4.3中所看到之14%曆元丟失相比,CFFS演算法可帶來26%曆元丟失。因此,兩個節點設置經組配。藉由節點傳回「典型資料」的第一設置,及藉由節點傳回「節點演算法資料」的另一設置。第一設置經設計以將資料供應至DDBase及RTKLib,而第二設置經設計以將資料供應至CFFS演算法之主要部分。
大約1週之「典型資料」經獲得用於DDBase及RTKLib,而大約2週之「節點演算法資料」經獲得用於CFFS演算法之主要部分以待處理。觀測並非同時採取,且歸因於需要再程式化節點以輸出「節點演算法資料」而非「典型資料」,其中節點之位置在兩個資料收集時段期間不可避免地稍微移位。此等移動係極小的且不改變吾人之結果。下圖展示解結果之鳥眼視圖。JAC計算全部日之解。
DDBase可計算全部日之解但其係不準確的,RTKLib並不成功地計算任何解。

為了比較對歸因於當使用JAC時在基地台中之節點之間傳輸「節點演算法資料」(而非「典型資料」)時曆元丟失之縮減而獲得解之能力的影響,節點演算法實施於基地台上且DDBase及RTKLib的用以計算以上解的一週有價值資料經由JAC而運行。JAC計算全部日之解;所獲得解之鳥眼視圖在下圖中展示。
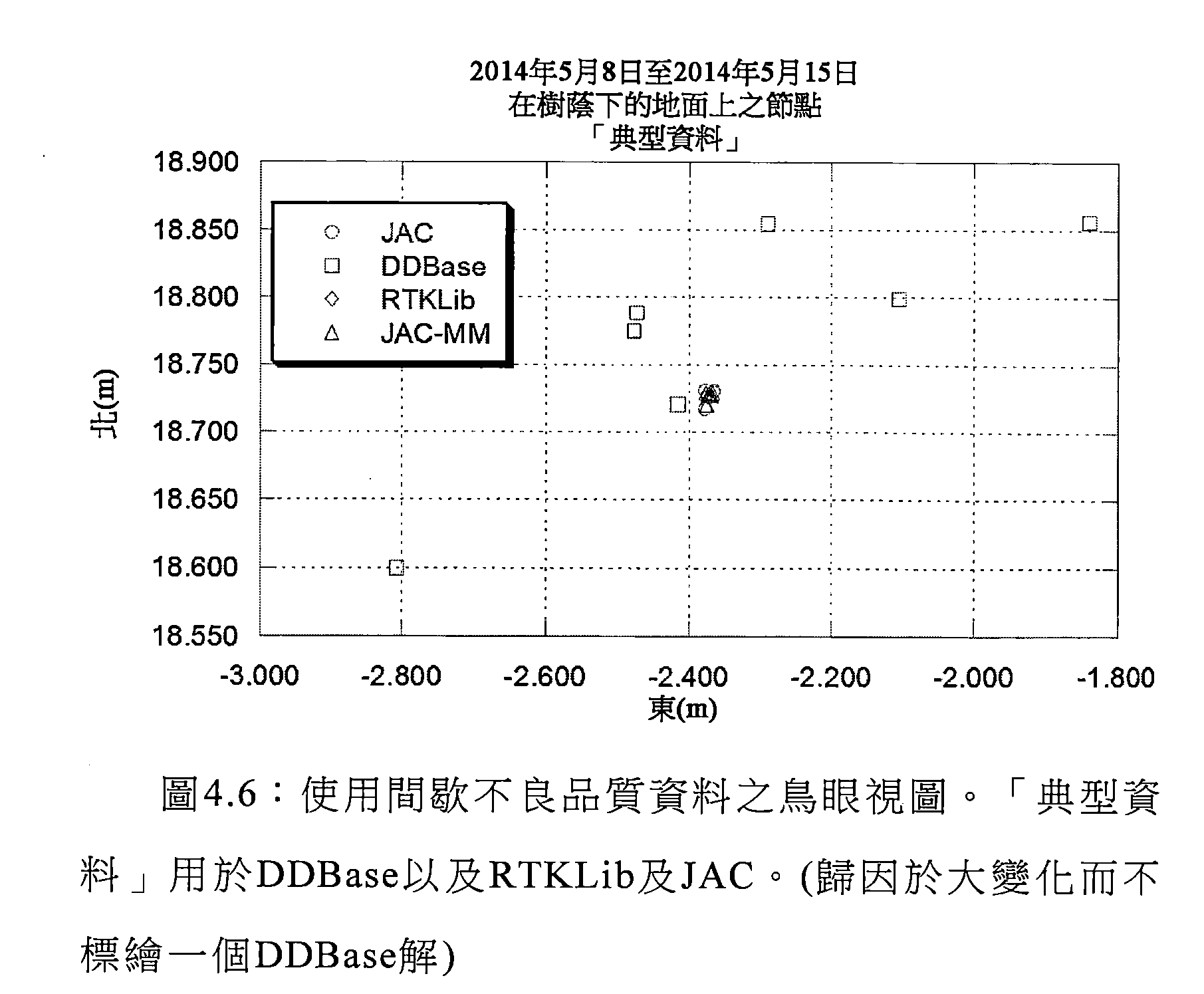
如可看到,不管曆元丟失之增加,JAC非常類似於在節點與基地台之間傳輸「節點演算法資料」的情況而進行。以下兩個表概述解之一些統計。
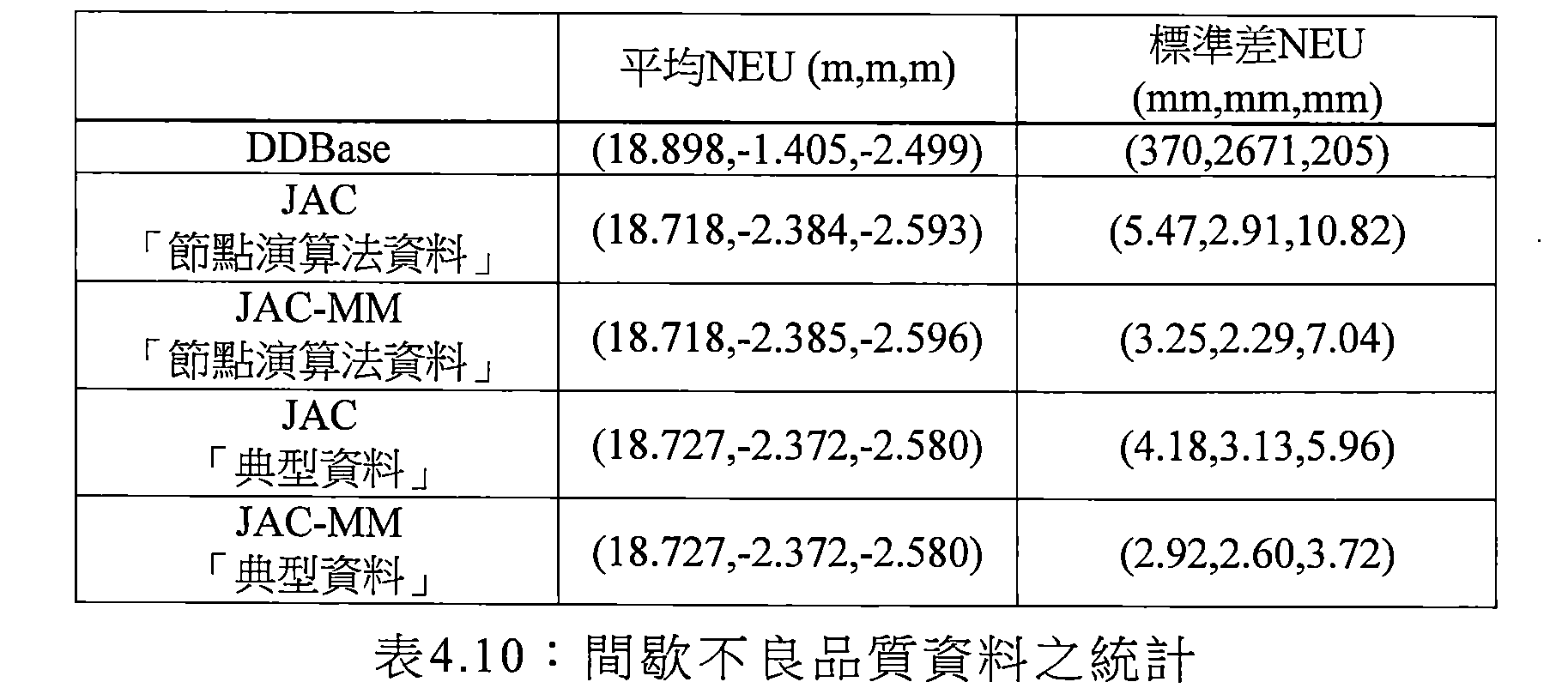

如可看到,僅僅JAC能夠獲得任一真實值之解。JAC之精確度的量測為高品質Te Papa惠靈頓機場資料之精確度量測的大約雙倍。歸因於小樣本大小,相比於「節點演算法資料」,當傳輸「典型資料」時JAC之樣本標準差不同於吾人將預期的標準差。與當傳輸「節點演算法資料」時相比,當在節點與基地台之間傳輸「典型資料」時引發的較高曆元丟失對能夠獲得有效解沒有顯著的效應。
4.2.5解比較概述
在下圖中描繪定性概述。
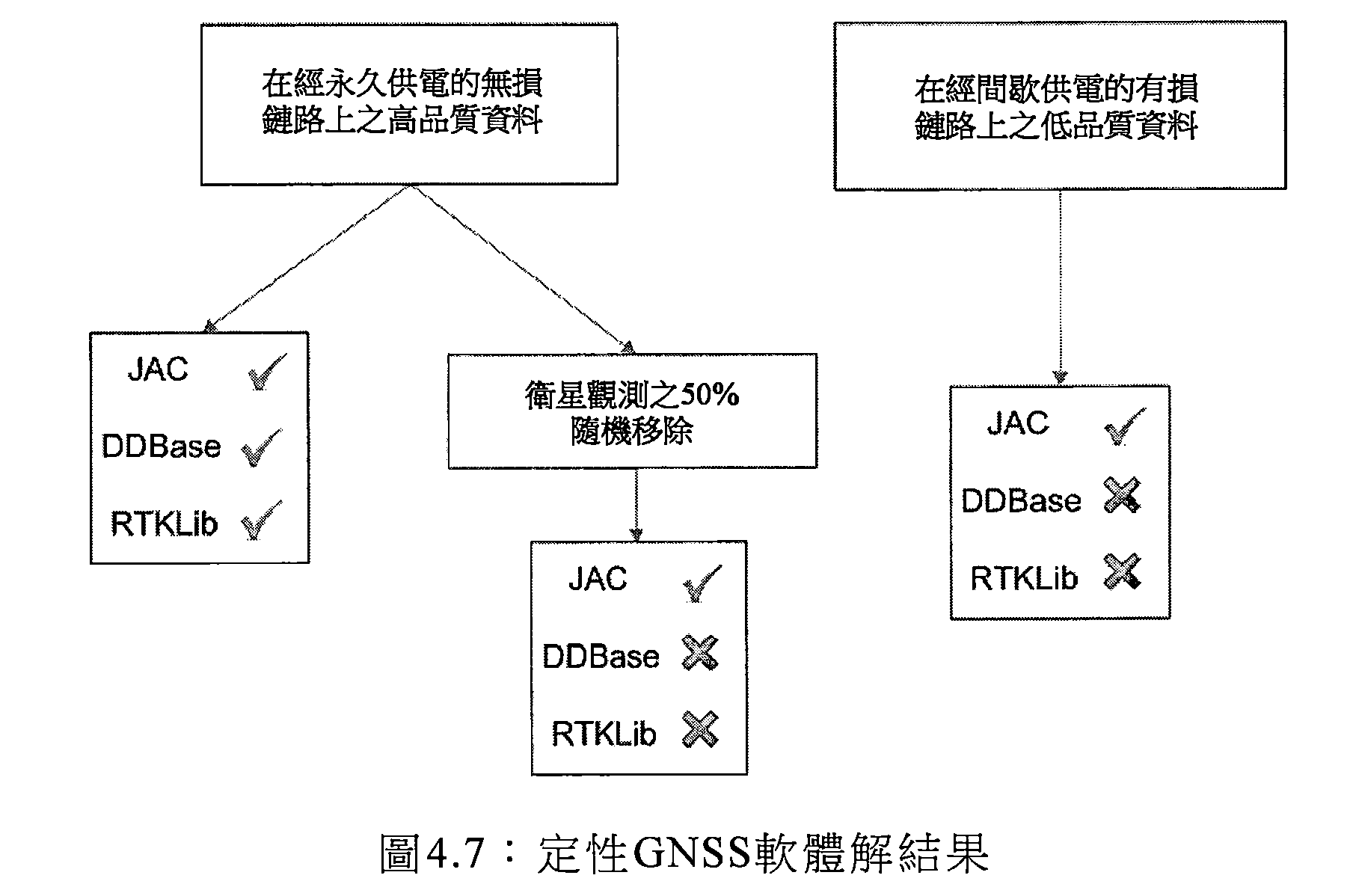
全部三個程式在使用經由經永久供電的無損無線電鏈路之高品質GPS資料時獲得類似的精確度,而同時產生相對於彼此範圍介於16mm至20mm之顯著不同偏差。DDBase及RTKLib兩者對遺漏衛星觀測極敏感而JAC對此等事件不敏感。歸因於JAC之對遺漏衛星觀測的不敏感度
及小樣本大小,相比於傳輸「典型資料」,當傳輸「節點演算法資料」時偵測精確度之不顯著改良。如所預期,與當在低多路徑環境中使用高端裝備時相比,當在高多路徑環境中使用吾人之低端硬體時JAC之解更糟。當使用吾人之GPS WSN節點時,僅僅JAC及JAC-MM可產生任何有意義準確度之解。因此,當JAC-MM為吾人之CFFS演算法的實施方案時,CFFS演算法適合於使用吾人之硬體的地面變形監測的吾人之應用。
雖然準確度可並不完全知曉,但歸因於吾人系統之高精確度可量測僅幾個公釐之小急劇移動。
試驗台結果及分析
6.1 Paekakariki試驗台
在下圖中展示Paekakariki試驗台。如由紫色圓描繪,節點彼此相對接近而置放·另外,永久供電GPS接收器節點置放在圖之右下手拐角處的建構之屋頂上。圖之左邊為北方向。
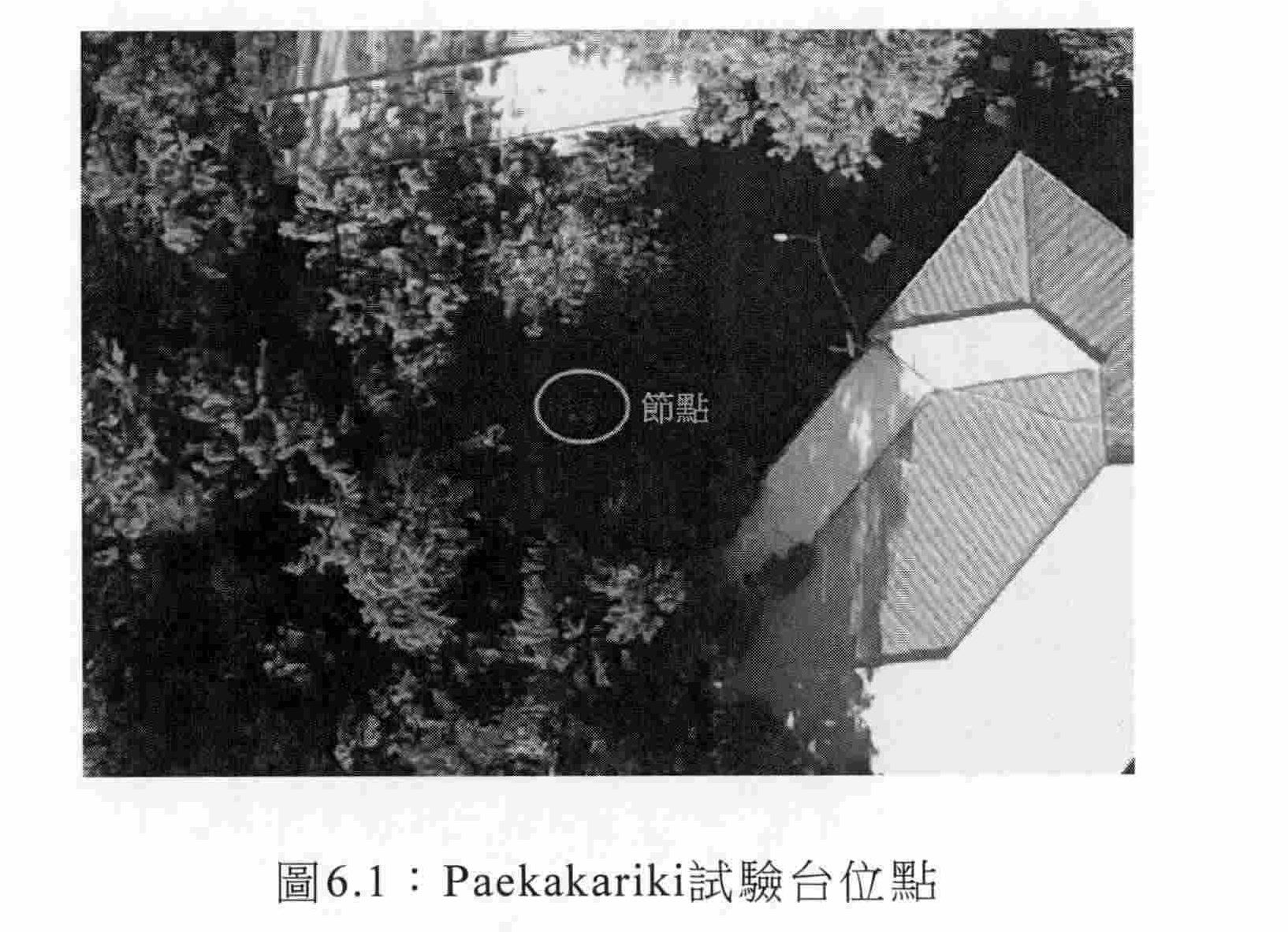
如可看到,用於地面上之節點之Paekakariki試驗台存在不良天空可見度,而在屋頂上之接收器具有稍微較好可見度。在此論文全篇中使用自此試驗台獲得之觀測及使用其之結果。
首先,吾人研究GPS接收器在一日中往往會在作用中的小時之數目及此數目如何變化。下圖展示節點272之GPS當在夏季及接著在冬季持續大約兩週置放於Paekakariki測
試位點處時每日在作用中及成功地傳回曆元的小時之數目。

在冬季,吾人觀測最小小於0.5小時,而在夏季吾人觀測最大大於8小時。平均起來,在冬季存在1.7小時在作用中而在夏季存在6.2小時在作用中;與冬季解相比,此意謂3.6倍多的曆元用於處理夏季解。下圖中描繪使用JAC-MM實施CFFS演算法之水平解。

如可看到,與冬季相比,似乎在夏季期間有更好精確度,如吾人預期,與冬季解相比,存在3.6倍多的曆元用於夏季解。
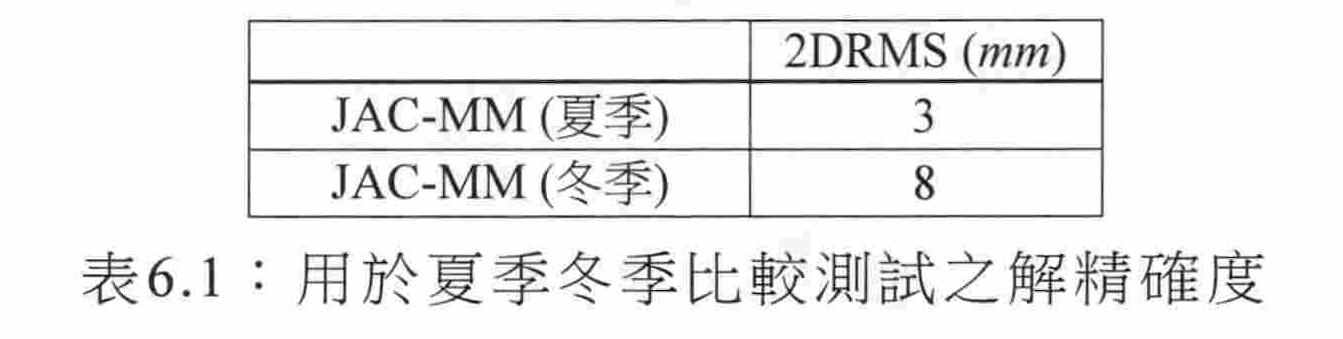
以下圖像展示在夏季持續一個月運行的在Paekakariki試驗台位點處之部署,其中北係在圖像之向上方向中且節點直接置放在地面上;此等三個節點可正好在圖6.1中看到。如此圖中可看到,樹陰影經過該等節點。

使用具有大約1cm之準確度的卷尺來量測至天線中的每一者之近似實體水平中心的量測。以下圖中描繪此等量測之結果。
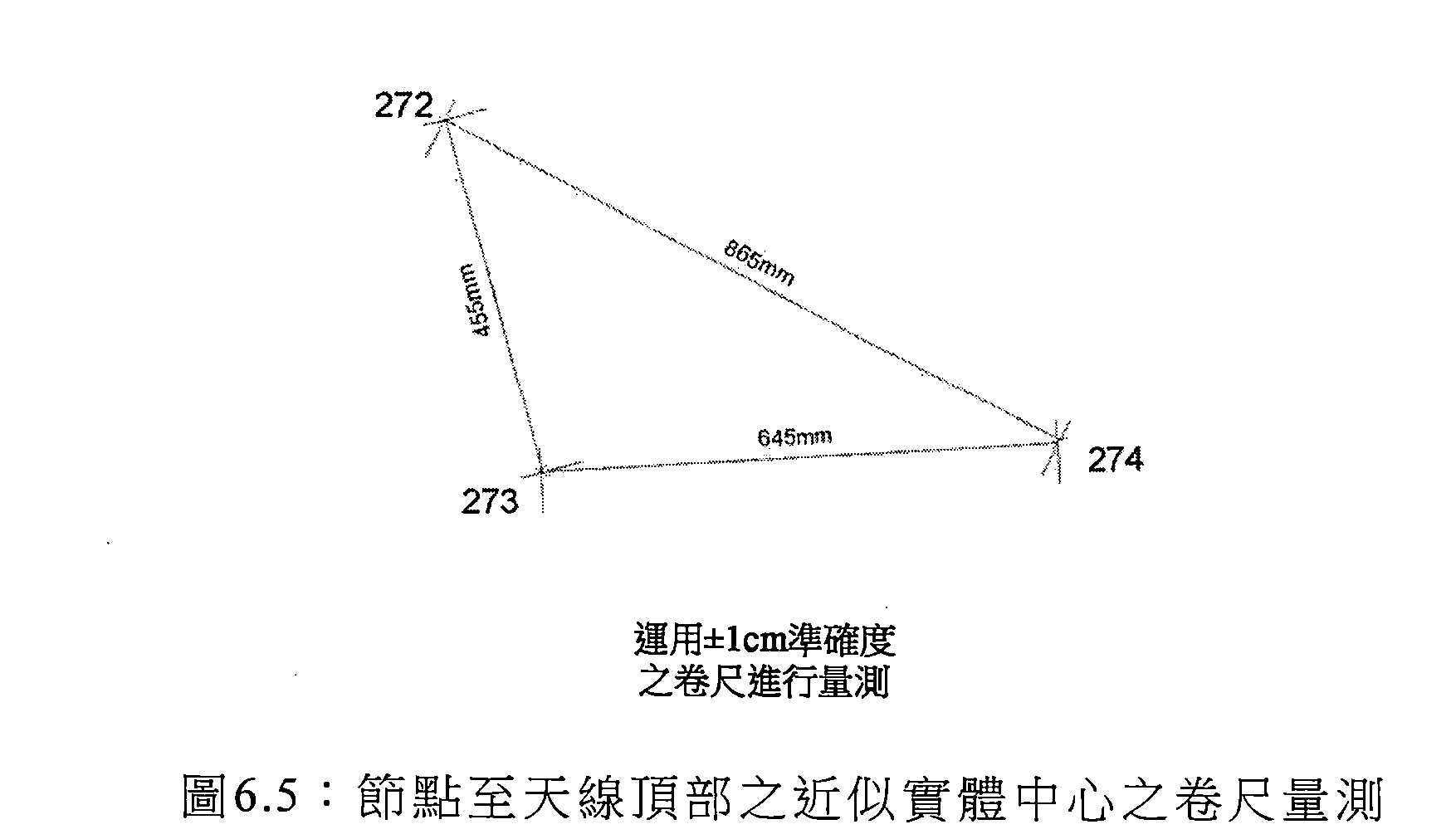
在一個月之後處理每天解,且在下圖中標繪全部水平解;每一節點之間的平均距離亦以如自CFFS解之水平分量導出的95%不確定度在以下圖中描繪。

因為三個天線中之每一者的相位中心(由於其為未經校準之天線)尚未知曉,所以對於使用卷尺的天線之近似實
體中心之間的相對距離量測之間的差,及水平CFFS解之平均值之間的差,吾人應預期此等僅僅為近似值。然而,不管此,此等距離值之差仍與使用卷尺量測的差一致。
持續此一個月靜態測試對於三個節點計算的平均2DRMS精確度為5mm且似乎為對於高多路徑環境之解精確度的典型值。
6.2 廬山試驗台
廬山位點為在臺灣南投山區的高於廬山之城鎮之坡道上的已知高危地滑位點。其為使用衛星成像、空中成像、雷射器測量及GPS研究的位點。作用中移動區帶大約涵蓋1km2且類似於在坡道之頂部開始的倒V之形狀。
4個小無電池GPS無線感測器節點之試驗台經部署於該位點處。節點係使用國立暨南國際大學(NCNU)之總台沿著用於基於雷射之地面變形監測之逆向反射器的邊而部署。
歸因於密集且高的植被,網路涵蓋及GPS衛星之充分可見度兩者係有問題的。為了充分網路涵蓋,使用兩個無電池太陽能供電無線電中繼器。一個中繼器置放在所關注之坡道上而另一個中繼器置放在相對之坡道上。為了GPS衛星之充分可見度,藉由目測發現節點位點且決定是否存在天空之足夠清晰視圖。節點274有意置放於坡道底部之靜止位置處作為參考點。其他三個節點或置放在作用中移動位點上。
充當用於藉由節點獲得的資料之儲集器的永久供電基
地台(亦稱為路由器)、經由3G數據機路由資料至吾人以經由網際網路以用於解處理的路由器,及用以獲得衛星觀測之GPS節點自身置放在稱為節點1之坡道上。基地台安裝於內部具有主插口之大預先存在防風雨金屬箱框中。
下圖展示節點、中繼器及基地台之位置;試驗台之大小大約為300m乘700m。

所關注的坡道上之地面滑移之方向係在大約東南方向上。不確定中繼器104是否定位於靜止地面上或是否地面亦在滑動,此係因為中繼器104不在所關注的坡道上。節點274
係唯一已知靜止位置。節點276及277係在滑動區域之極西側而節點275係在滑動區域之極東面。永久供電之基地台亦充當稱為節點1之GPS接收器節點。節點1亦在滑動區域之西側。
L1 GPS相位可觀測量係用以計算相對節點方位之主要觀測。此等相位可觀測量連同藉由GPS接收器自身計算的自主解一起經組合以在使用2.4Ghz 802.15.4無線電直接或經由一系列中繼器發送其回至儲集器之前修改節點上之相位可觀測量。儲集器接著經由3G網際網路連接傳遞此資料至吾人上以用於處理。不管電池之缺少,節點經設計以如所預期在大雨期間在黑天在極低光條件下操作,然而節點將在夜晚並不起作用。由此,節點僅僅在白天期間傳回資料。
在夏季使用靠近測試位點安裝在NCNU處之模擬節點進行溫度量測且58.1℃之最大溫度係在節點內量測到。節點內部之任何組件的最小額定值為70℃,因此最大記錄溫度係在組件容許度內。
第一節點係在2014年7月4日安裝而最後節點在2014年7月15日安裝。節點之安裝方法可在下圖中看到,其中金屬邊緣係用螺栓栓至道路之壁中的一者之側面。節點或中繼器接著使用RTV矽酮膠合至頂部。
臺灣大約6月至10月往往會持續有季節性颱風。希望歸因於熱帶氣旋之大雨可能造成吾人可量測的地面變形。在2014颱風季節期間僅僅兩個熱帶氣旋衝擊臺灣;大約在2014年7月23日(204日)的稱為麥德姆之2類颱風及大約在2014年9月21日(264日)的稱為鳳凰之熱帶風暴。

節點失效為顯著問題。節點274最終在2014年8月11日失效,節點275在2014年8月13日失效,且節點277在2014年12月21日失效。節點274及275正常進行直至其最終失
效。節點277在颱風麥德姆期間失效且此後兩天沒有傳回信號。節點277逐漸變得間歇,最終在2014年12月20日聽到最後信號而在2014年11月16日聽到倒數第二次信號。節點276幾乎完美地起作用且僅僅在熱帶氣旋鳳凰期間之三天確實無法傳輸任何信號。
完美且並非一天進行的基地台硬體及中繼器兩者被觀測,其中兩者中之任一者失效。
假定節點失效之原因係由進入電子電路並造成腐蝕及短路之水所引起。然而,因為吾人係以紐西蘭為基地,所以可並不容易地返回並檢查此等節點失效之原因。下圖展示在其失效之後某一時間的節點275。最初GPS天線為光亮的銀色而顯然在下圖中其失去光澤。天線係在RTV矽酮下方,RTV矽酮經設計以保護天線以對抗元件。在天線之右下角處的少量棕色亦大概被腐蝕。因此,似乎很可能此特定節點歸因於水破壞而失效。
節點失效之另一疑似問題係植物過度生長。以下係在節點277間歇地失效時間期間的節點277之圖像。

吾人自身先前設法建立不受水破壞影響之節點證明係困難的。在Paekakariki試驗台處在外面六個月之後,在開啟GPS接收器節點後就獲得以下圖像。如可看到,相當大量的水已進入殼體且亦設法在過去得到覆蓋PCB之保形塗層。實際上,由於PCB上之保形塗層,水不能排盡,從而使情形更糟。
在廬山試驗台處在2014年年初,吾人發送最初GPS接收器節點以待於坡道上測試。截至吾人6月下旬到達,在開啟一個接收器節點後,就如可在下圖(圖6.13)中看到含有並
未排盡之熱水的殼體。吾人在7月放置在坡道上之新節點之殼體已經重新設計,且節點自身內部之PC板完全覆蓋在環氧樹脂中,惟程式設計接腳除外。GPS天線覆蓋在環氧樹脂中。吾人希望此將預防歸因於水破壞的節點失效。然而,吾人沒有足夠時間來預先嚴密進行測試。
吾人希望使用節點274作為固定參考以便能夠量測與其他節點之相對位置。然而,因為節點274在安裝之後大約一月失效,所以上述希望在試驗台運行的大部分時間未實現。此使僅僅節點1及276在大部分時間內可用·節點1安裝在金屬I樑上,金屬I樑從前可能垂直但歸因於地面變形而有微向南傾斜坡度。此等節點皆在作用中滑動區帶上,意謂如沿著道路之壁與I樑頂部之間的長期關係的全部,吾人長期可希望量測。
6.2.1相對於節點274之移動
在以下圖中,吾人展示無線太陽能供電GPS接收器相對於節點274的NEU時間數列。此藉由採取相對於節點274的每一節點之間的最終解之差而進行。當採取解之間的差
時加性雜訊增加。然而,似乎在自相對於共同參考台的兩個不同節點獲得的解之間存在相當大的隨機相依性,此係大概因為類似日光條件造成觀測在兩個節點之間被相當類似地採取。因此,此方式獲得的解之精確度並不如吾人首先可能預測之精確度一般差。計算解之此方法具有以下優點:能夠使用在作用中滑動區帶上之永久供電參考台作為參考台使得最大化存在用於在給定太陽能供電GPS接收器上觀測之曆元之機率的優點,因此更多雙差可用於最終解。此與藉由使用兩個無線GPS接收器節點自身獲得雙差值且因此求解方位之方法進行對比;在此狀況下兩個GPS接收器節點必須同時獲得未必發生的雙差。另外,與建立兩個GPS接收器自身之間的雙差相比,非常容易減去最終解。
對於下圖,吾人標繪運用實施如第2章中所描述之CFFS演算法的JAC-MM產生的NEU解。全部無線GPS接收器節點相對於節點274之時間數列被標繪,此係因為吾人被告知無274在非滑動區帶上。因為節點274在安裝之後不久失效,所以僅僅大約一月之解經標繪在諸圖中之每一者上。正好在第204日之前的黑色垂直線表示近似時間觀測將受颱風麥德姆影響。在277-274NEU時間數列圖中,兩個離群值被人工地移除,此係因為其顯著與解之剩餘部分不一致。
使用獲得相對於節點274之相對解的此間接方式,忽略前14個解以允許恆星濾波穩定為3.3mm之平均2DRMS精
確度。
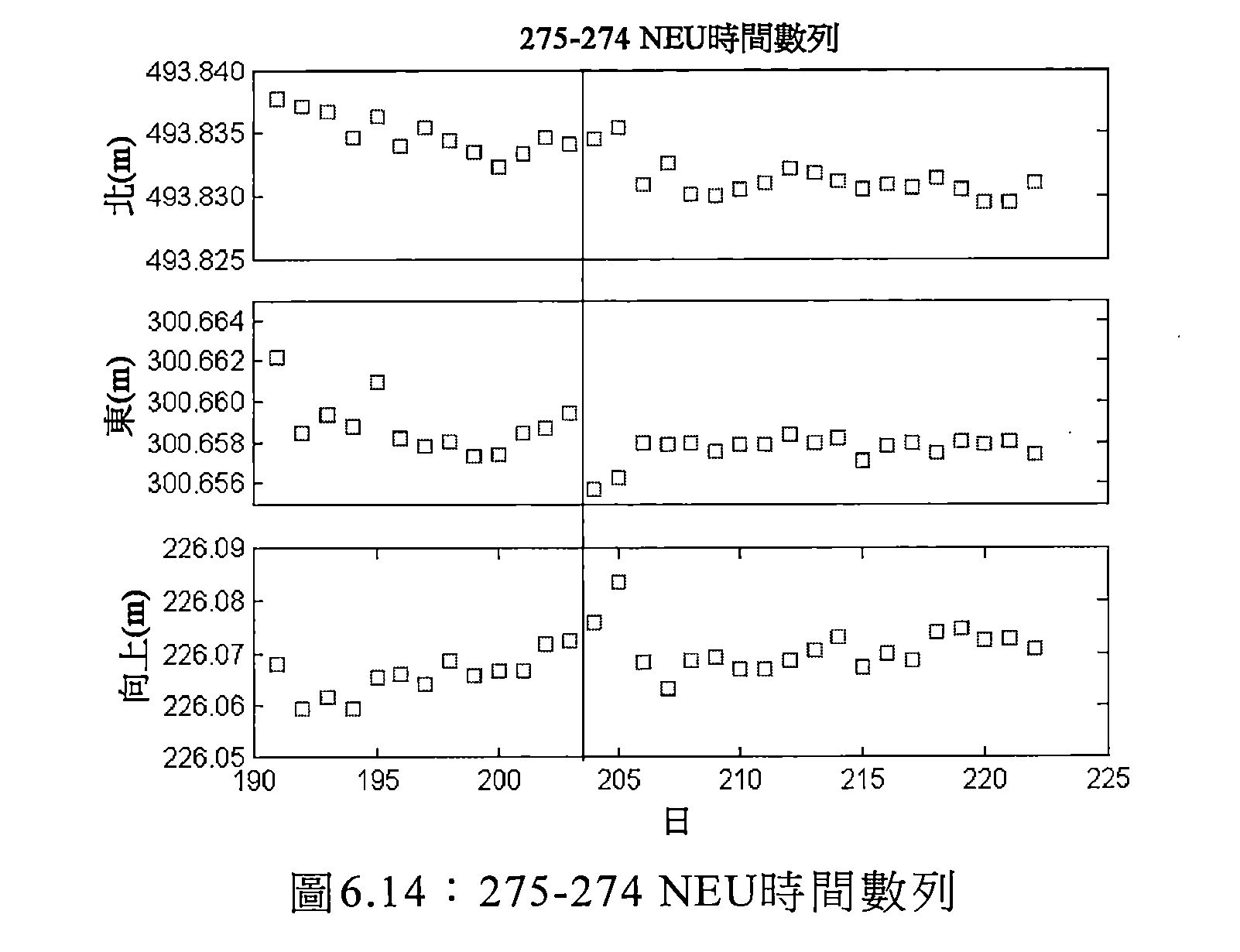
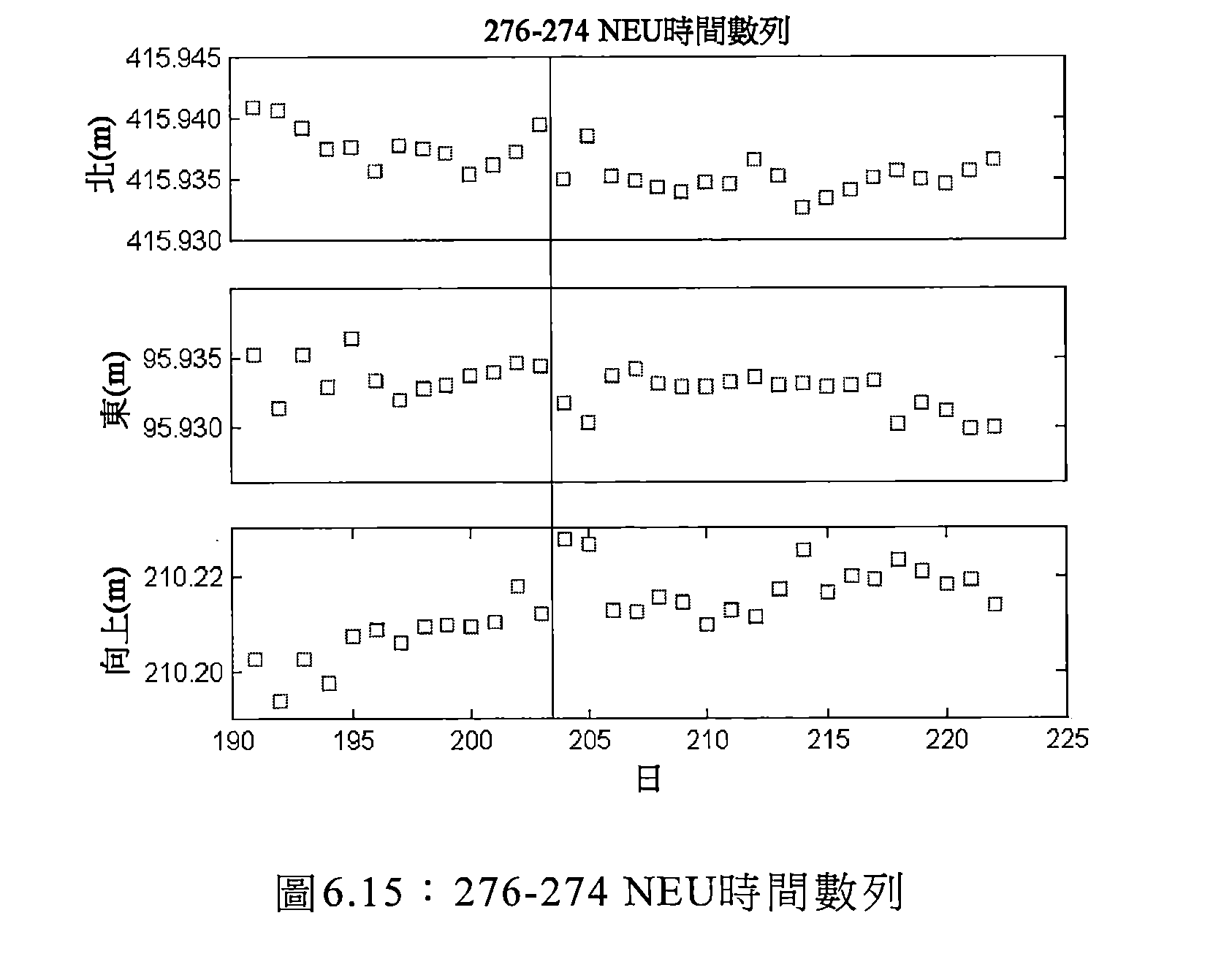

如可看到,不存在歸因於颱風麥德姆引起的顯著移動。在颱風之後約幾天的任何解偏差可歸因於雙差之缺少,此係因為陰天或土壤膨脹或一些其他暫時現象。全部節點具有在0.12mm/日至0.22mm/日之間的向南趨勢。節點277具有稍微向東分量而275及276具有極微小向西分量,全部節點具有在0.3mm/天至0.7mm/天之間的向上分量。不存在有力證據證實此在此短暫時間段內之極微小趨勢與任何地面變形有關,且完全可以想像其實際上為歸因於相對於太陽日之四分鐘恆星移位或節點隨著時間而沈降引起的在第3章中之模擬中預測的緩慢偏差變化。
6.2.2相對於節點1之277及276
在第222日之後從未再次聽到節點274。節點277愈來愈少聽到,而節點276截至書寫今天仍繼續。因此,此時吾人
比較相對於節點1之解且特定言之集中於相對於節點1之276,此係因為此對大部分始終在作用中。
下圖展示節點277相對於節點1(277-1)之NEU時間數列解。正好在第264日之前的第二中心黑色垂直線表示熱帶風暴鳳凰可能影響解之時間。
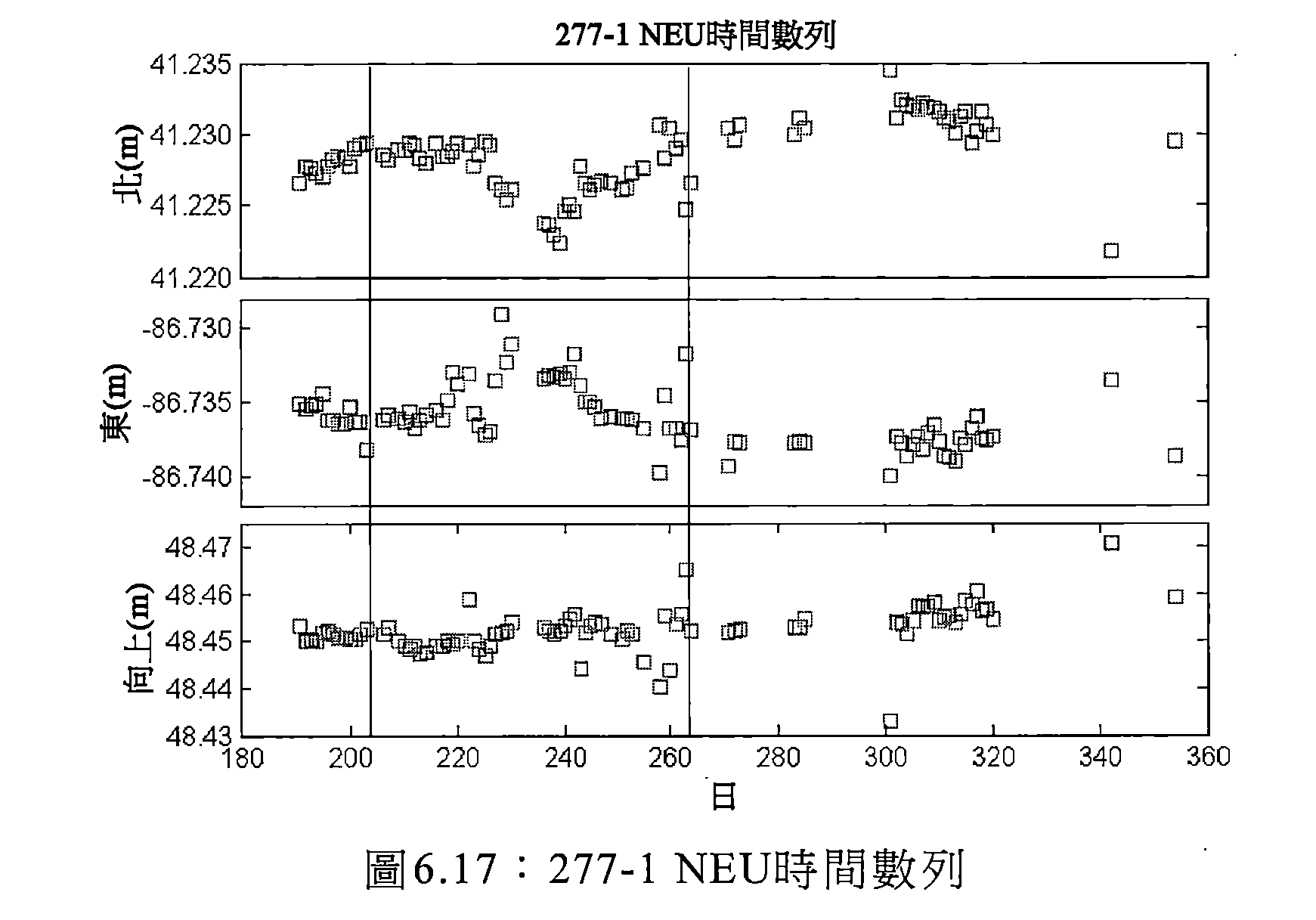
如可看到,顯著異常以約日期230為中心發生並延伸至少10日至日期之任一側。在北方向上存在約5mm之下降而同時在東方向上存在大約相同量值之上升;此並不為吾人知曉。如可看到,在熱帶風暴鳳凰衝擊之日附近並不存在顯著改變。如同到目前為止對於廬山展示的全部解,在向上方向上存在緩慢大約線性增加;在此狀況下約0.03mm/日至0.05mm/日。
下圖展示使用JAC-MM獲得的276-1之東北向上時間數列解。

在大約第340日至第360日之間存在雜訊之異常增加,此係在12月期間。吾人認為此雜訊係由於道路施工,因為在此時間期間道路瀝青中之一些被替換,經過感測器之重型機械可能使其振動。然而,遠離道路施工之月,解一般係非常精確且在其被獲得的七個月內緩慢改變。因為此係吾人之持續最大時間段的測試,所以吾人視為七個月足夠接近於12個月,期間吾人可至少獲得系統(諸如吾人之系統)將在典型設定中具有的預期準確度之想法。若節點276並不移動及/或其周圍環境並不改變,則忽略前14日以允許恆星濾波將內部解準確度穩定為9.12mm 2DRMS;當然,此僅僅在不存在移動或周圍環境不改變之情況下有效。此
亦可大約視為內部準確度之最差狀況。另一方面,若解之緩慢改變由節點自身之實體移動引起,則使用10次多項式擬合以移除解之緩慢改變,獲得大約3.6mm之2DRMS內部準確度;此可被視為解準確度之最佳狀況且亦被視為解精確度。
首先,吾人應注意,向上方向在非線性方面不同於節點277,東解平滑地波動而北解相當平坦直至第310日,在第310日中其快速下降而同時向上方向快速增加。吾人注意到最顯著的事係,正好在熱帶風暴鳳凰之前獲得的向上解顯著高於正好在該風暴之後獲得的向上解。同時在北解中亦存在相當顯著快速改變。另外,解之改變率在風暴之前及之後突然改變。若吾人在第242日與第287日(包含端點)之間獲得主要主分量方向向量,則可較好看到此等快速改變,且標繪此等解,如在下圖中可看到。
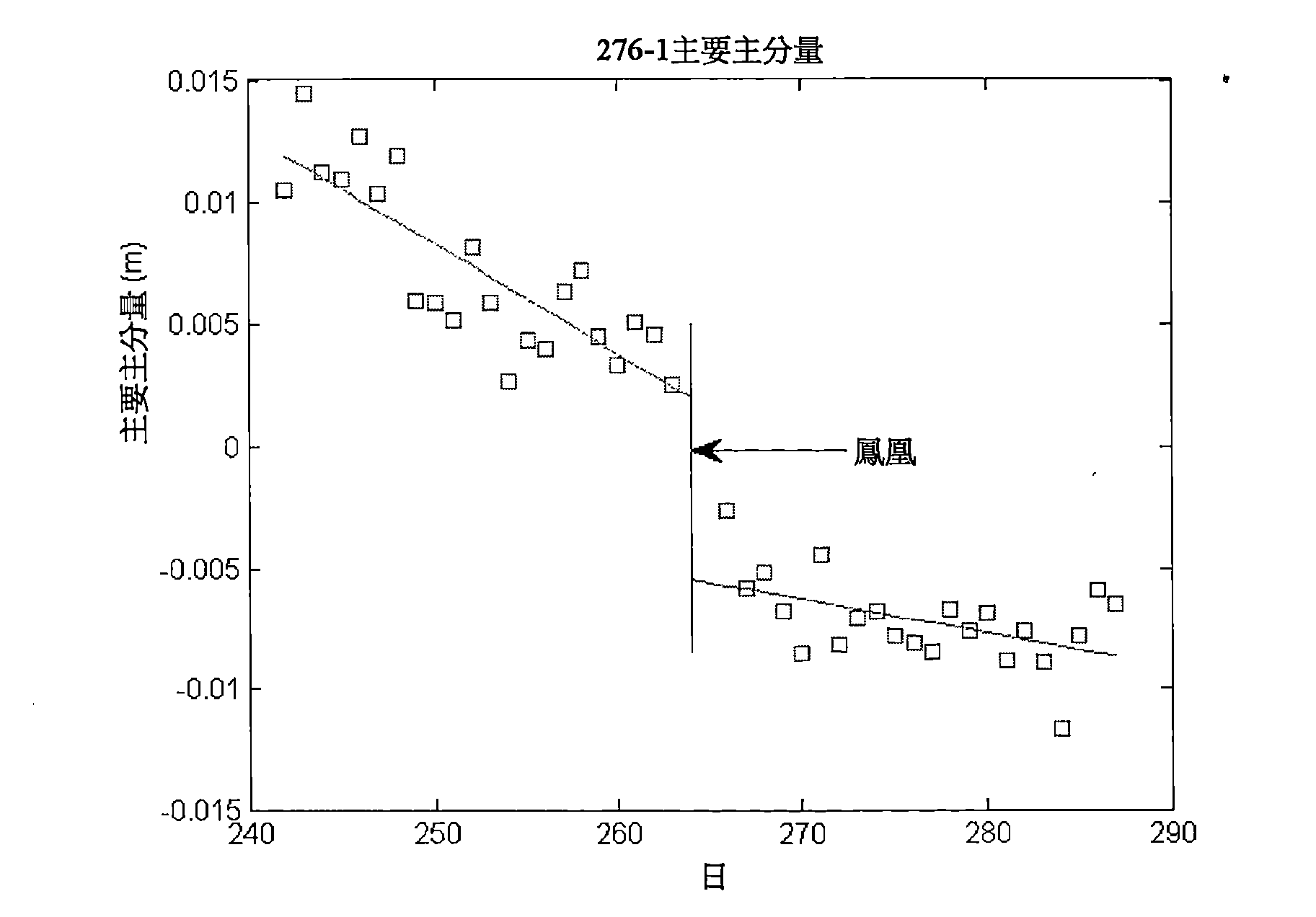
此圖大約展示在氣旋之前的20日及在氣旋之後的20日。綠線及紫線分別為針對在氣旋之前及之後的時間之線性擬合。解在氣旋之前及在氣旋之後以不同速率改變。另外,兩個線性擬合在氣旋時失配7.45mm。解看起來亦繞其線性擬合大體上正態分佈。吾人接著藉由自此等解中移除線性趨勢而估計此位移之準確度以獲得具有點線標準差之下圖。
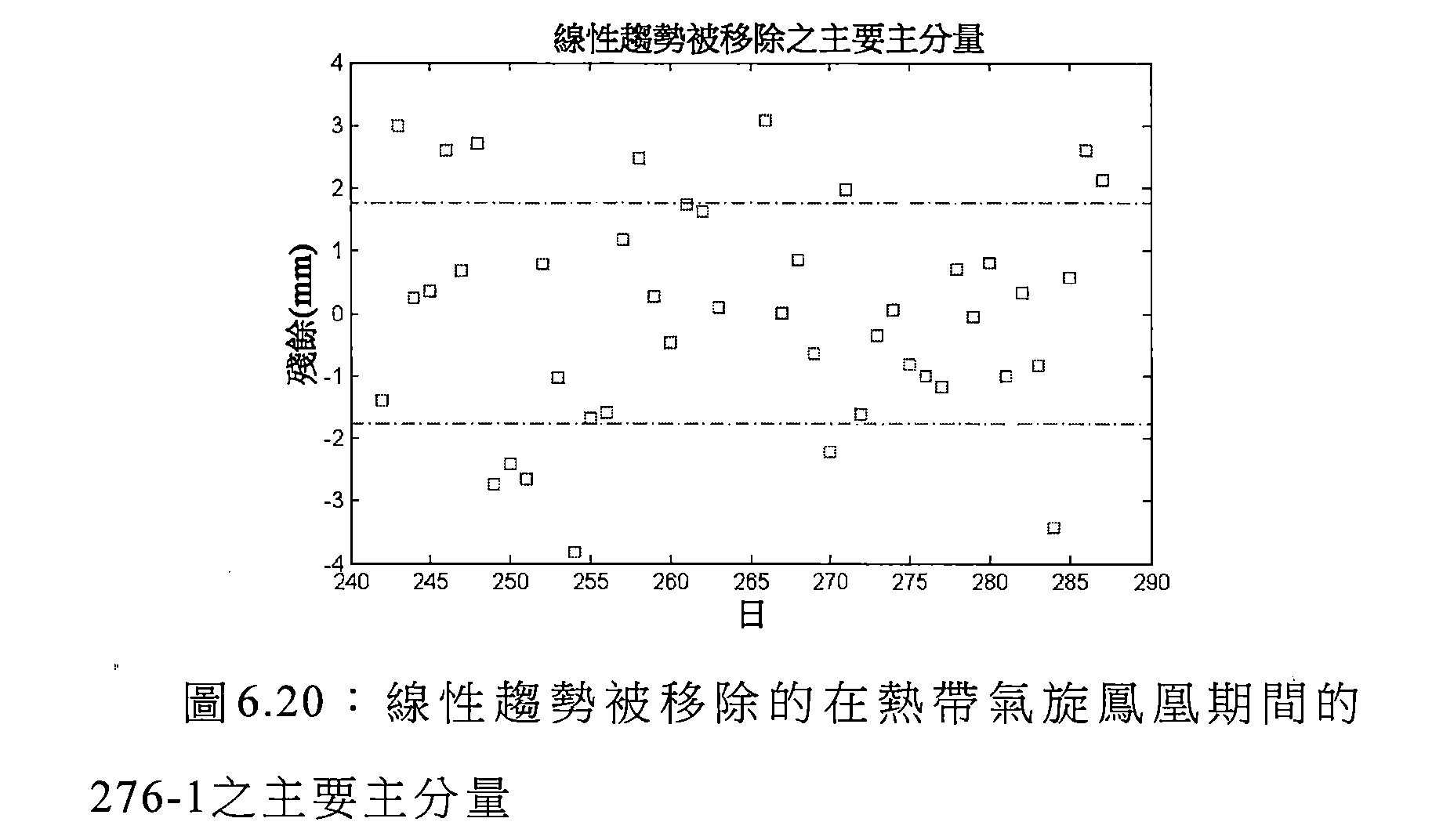
如可看到,其看起來為具有1.758mm之標準差的相當正態分佈。因此,吾人應獲得所量測之移動關於吾人之估計為 的95%可信度。換言之,7.5±1.6mm為在氣旋之前及之後的主要主分量之改變的吾人之估計。自第3章,歸因於四分鐘每天移位之緩慢解偏差改變,吾人在吾人之模擬中並未看到,在吾人之模擬中應存在解導數之不連續性或解自身之不連續性。如吾人自模擬
所預期,解偏差改變應具有一年之重複時段,吾人在短時段(諸如20日)內預期到,解偏差不應在此短時間段內顯著地變更;此調整吾人已藉由在氣旋兩側使用線性擬合而進行之物。另外,似乎線性擬合的確如可在前圖中所看到極好地擬合。雖然看起來圖6.18中存在可或可不與移動相關的解導數之其他不連續性,在第264日之此不連續性確切出現於氣旋鳳凰衝擊之時,但似乎更大可能的是此不連續性係歸因於節點移動或節點之周圍環境改變(諸如樹倒下,改變多路徑環境)中之一者而引起。因此,在忽略節點周圍環境改變之可能性的情況下,吾人說節點中之一者的確移動7.5±1.6mm係相當有可能的。節點276相對於節點1在幾乎垂直之具有大約-75°仰角的行進方向中移動且在具有大約280°之方位角的水平面中移動小分量;換言之,節點276向下移動或節點1向上移動。
的95%可信度。換言之,7.5±1.6mm為在氣旋之前及之後的主要主分量之改變的吾人之估計。自第3章,歸因於四分鐘每天移位之緩慢解偏差改變,吾人在吾人之模擬中並未看到,在吾人之模擬中應存在解導數之不連續性或解自身之不連續性。如吾人自模擬
所預期,解偏差改變應具有一年之重複時段,吾人在短時段(諸如20日)內預期到,解偏差不應在此短時間段內顯著地變更;此調整吾人已藉由在氣旋兩側使用線性擬合而進行之物。另外,似乎線性擬合的確如可在前圖中所看到極好地擬合。雖然看起來圖6.18中存在可或可不與移動相關的解導數之其他不連續性,在第264日之此不連續性確切出現於氣旋鳳凰衝擊之時,但似乎更大可能的是此不連續性係歸因於節點移動或節點之周圍環境改變(諸如樹倒下,改變多路徑環境)中之一者而引起。因此,在忽略節點周圍環境改變之可能性的情況下,吾人說節點中之一者的確移動7.5±1.6mm係相當有可能的。節點276相對於節點1在幾乎垂直之具有大約-75°仰角的行進方向中移動且在具有大約280°之方位角的水平面中移動小分量;換言之,節點276向下移動或節點1向上移動。
吾人並不將解導數之不連續性完全理解為其不在吾人之模擬中出現。圖6.18中之一個顯著不連續性係在約第315日在向上方向中,其亦伴隨著北方向上之緩慢下降。此恰巧符合3.6量級及4.9km深度之小較淺地震,非常接近但可恰好重合。
6.2.3與逆向反射器觀測之比較
下圖展示在位點處之逆向反射器之位置。綠色逆向反射器為在作用中滑移區帶外部並用於滑移區帶中之反射器的相對定位的逆向反射器。
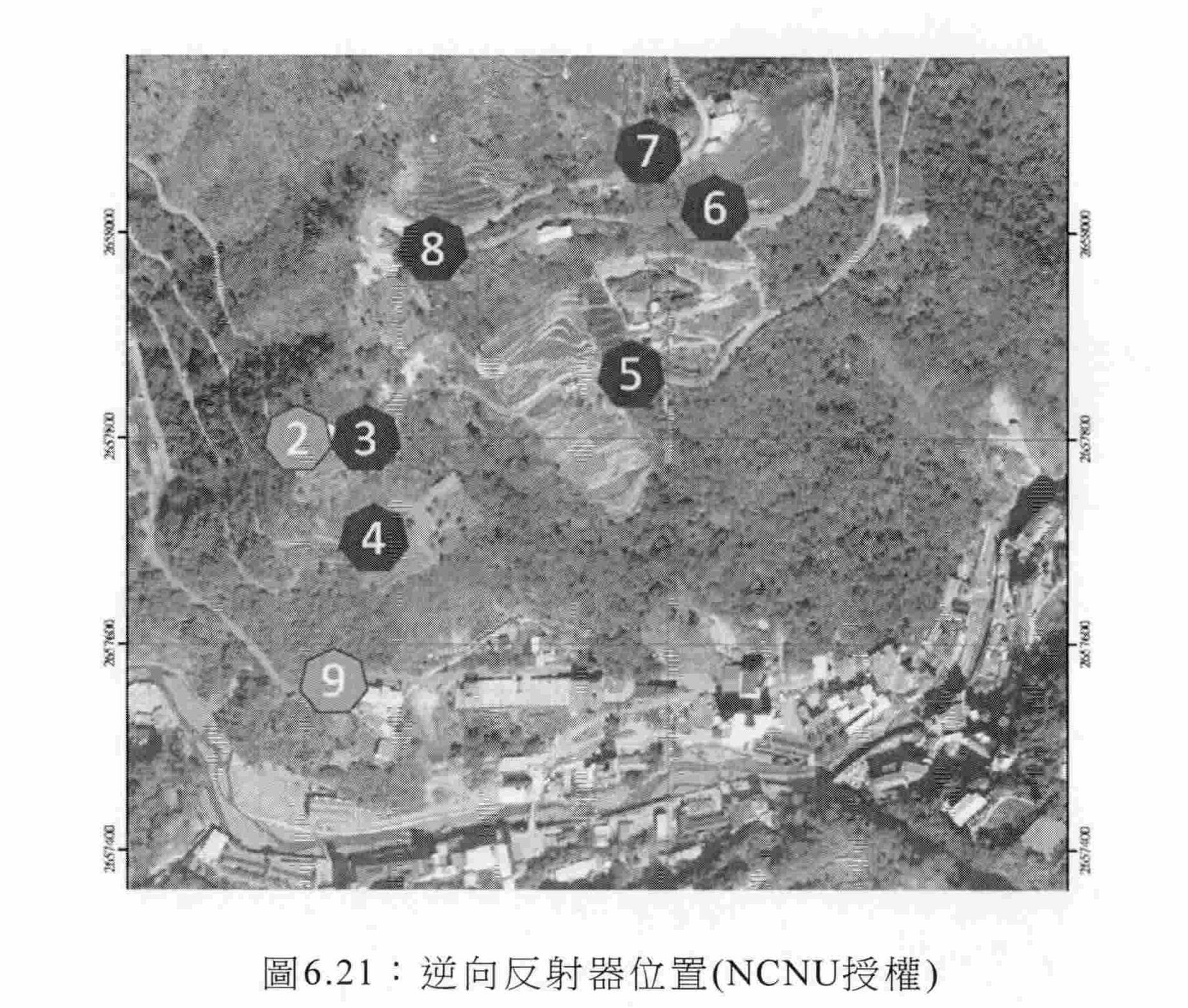
如可看到,不存在裝配於吾人之基地台之GPS接收器節點1的位點處的逆向反射器。逆向反射器8緊鄰於吾人之節點276定位,而逆向反射器9緊鄰於吾人之節點274。由NCNU使用之總台為Trimble S8;根據NCNU,其自Trimble接收之報告說距離準確度為2mm±1ppm且角度準確度為0.5",但吾人並未被通知此等準確度類型係什麼。自Trimble S8資料表[56],存在對於不同情形給出之許多不同準確度;其中使用逆向反射器,全部準確度係大約相同數量級且經給定為用於距離之RMSE及用於角度之標準差。對於在「DR HP」下之效能,距離準確度1mm+1ppm RMSE及0.5"標準差之角度準確度。因此,吾人假定距離準確度2
mm+1ppm RMSE及0.5"標準差之角度準確度,其大約匹配於如資料表中給出之「DR HP」效能,且數目極類似於由NCNU給予吾人之數目。總台置放於位點正南大約一公里;角度準確度及距離準確度以及定向可在下圖中看到。
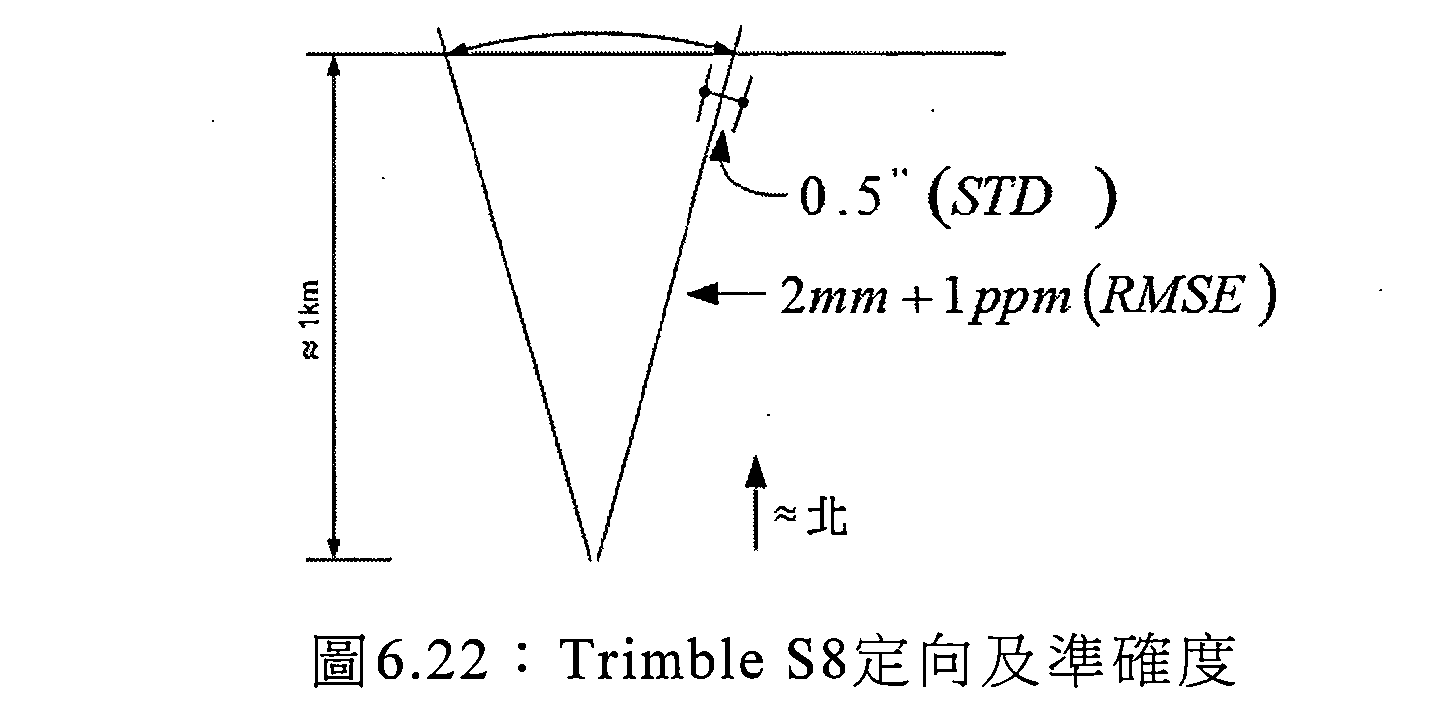
為了獲得應自總台預期什麼3D準確度之想法,導出極近似估計。對於東及向上準確度,吾人使用假定關於北軸之旋轉對稱性的小角度近似,而北準確度之假定僅為共台之距離準確度。進行此意謂東及向上方向中之標準差為約 2mm,而北方向之標準差為約
2mm,而北方向之標準差為約 。因此,95%可信度區間產生東或向上±4mm及北±6mm及7mm之2DRMS準確度。
。因此,95%可信度區間產生東或向上±4mm及北±6mm及7mm之2DRMS準確度。
以下三個圖展示自2013年11月8日以來至如顏色所指示之日期的逆向反射器相對於逆向反射器2及9的總位移。舉例而言,在2014年7月2日與2014年8月28日之間,逆向反射器6在第57日向南移動10mm。
吾人關注逆向反射器8,此係因為此對應於吾人之節點276,且吾人關注逆向反射器3及4,此係因為此等接近於吾人之節點1且因此吾人將預期到地面之移動更可能類似於
其他逆向反射器。


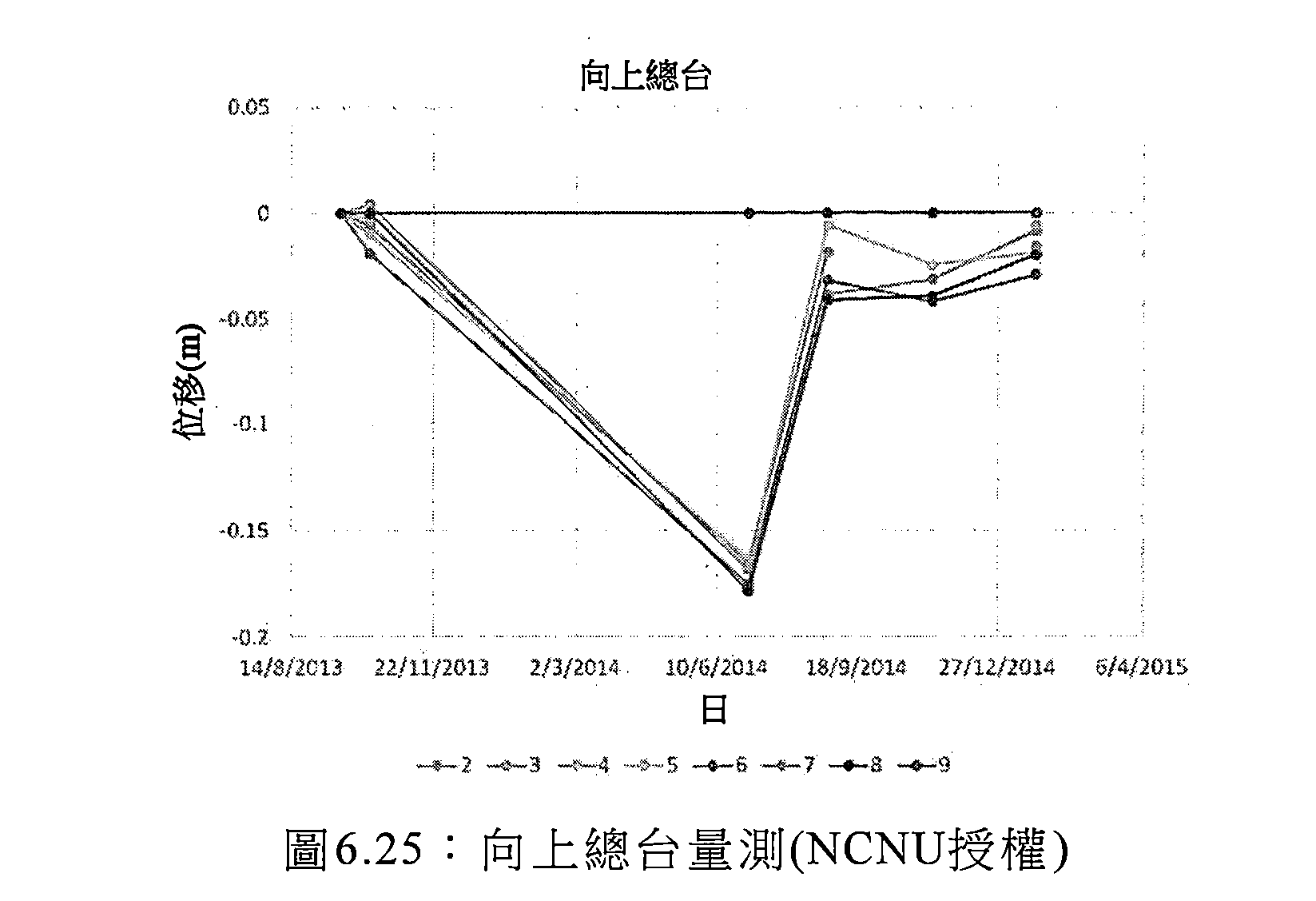
如可看到,存在使用總台獲得之解的一些相當大的改變;第三向上解及第四東解顯著遠離吾人將預期的解。每當總台用以獲得量測時亦出現解之相當大的相關性,如可看到,當一個解向南移動時全部其他解往往會同時移動。量測之稀疏性係有問題的,此係因為此使得難以知曉量測可靠性如何。在全部解之中,北解似乎為最一致且展示如所預期之緩慢向南的一般趨勢。東解及向上解兩者甚至在移除在7月及8月進行之量測之後似乎仍不能說大量。顯然存在引入至此等解中之顯著大於吾人估計之誤差的其他誤差。歸因於此等其他誤差,不知曉坡道之實際移動如何與總台量測相關。雖然不令人滿意,但吾人實際上不能比較GPS解與總台解。
總台量測係時間稀疏且可變的,從而使結論困難。用於瞬時移動(亦即,不緩慢且連續之移動)之GPS解如吾人對於歸因於熱帶風暴鳳凰之解改變所說顯然極精確。對比
而言,難以自GPS解對GPS接收器在六個月內之長期移動作出結論。此係因為自多路徑及恆星濾波,吾人預測歸因於多路徑偏差之解分量,其經預測為在年內改變,從而使得難以區分真實移動與僅緩慢改變的解偏差。另外,在節點274失效之前在7月可僅僅比較GPS移動。然而,在此月中,GPS接收器全部展示相對於被給定為靜止的節點274之微小南向趨勢,此匹配自總台獲得的北解之變化的一般趨勢與吾人將預期之趨勢。
110‧‧‧無線感測器網路(WSN)
116A、116B、116C‧‧‧節點
400‧‧‧系統
402‧‧‧代碼模組
404‧‧‧浮動模組
406‧‧‧固定模組
408‧‧‧恆星模組
Claims (30)
- 一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,其包含:接收相關聯於一第一接收器之第一位置資料;接收相關聯於一第二接收器之第二位置資料;判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
- 如請求項1之方法,其中判定該第一相對方位包含:判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差。
- 如請求項1或請求項2之方法,其中該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一衛星識別符、一接收器識別符、一時間、一平均化自主方位中之一或多者。
- 如前述請求項中任一項之方法,其中判定該第二估計相對方位包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及 至少部分地自該觀測矩陣界定一解估計。
- 如前述請求項中任一項之方法,其中判定該第三估計相對方位包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,其包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
- 如請求項6之方法,其進一步包含界定至少一個模糊度估計。
- 如請求項6或請求項7之方法,其進一步包含界定一共變數矩陣。
- 一種判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,其包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 如請求項9之方法,其中界定該解包含:獲得一第一解估計; 捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
- 一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統,其包含:一代碼模組,其經組配以接收相關聯於該第一接收器之位置資料,接收相關聯於該第二接收器之位置資料,且判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;一浮動模組,其經組配以至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;一固定模組,其經組配以至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及一恆星模組,其經組配以至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
- 如請求項11之系統,其中該代碼模組經組配以藉由判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差來判定該第一相對方位。
- 如請求項11或請求項12之系統,其中該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一 衛星識別符、一接收器識別符、一時間、一平均化自主方位中之一或多者。
- 如請求項11至13中任一項之系統,其中該浮動模組經組配以:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
- 如請求項11至14中任一項之系統,其中該固定模組經組配以:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統,其包含一浮動模組,該浮動模組經組配以:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
- 如請求項16之系統,其中該浮動模組經進一步組配以界定至少一個模糊度估計。
- 如請求項16或請求項17之系統,其中該浮動模組經進一步組配以界定一共變數矩陣。
- 一種用於判定相關聯於一第一接收器及一第二接收器之一相對方位的系統,其包含一固定模組,該固定模組經組配以:接收至少一個模糊度估計; 將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 如請求項19之系統,其中該固定模組經進一步組配以:藉由獲得一第一解估計來界定該解;捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
- 一種電腦可讀媒體,其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收相關聯於一第一接收器之第一位置資料;接收相關聯於一第二接收器之第二位置資料;判定相關聯於該第一接收器及該第二接收器之一第一估計相對方位;至少部分地自該第一估計相對方位判定相關聯於該第一接收器及該第二接收器之一第二估計相對方位;至少部分地自該第二估計相對方位判定相關聯於該第一接收器及該第二接收器之一第三估計相對方位;及至少部分地自該第三估計相對方位判定相關聯於該第一接收器及該第二接收器之一第四估計相對方位。
- 如請求項21之電腦可讀媒體,其中判定該 第一相對方位包含:判定相關聯於該第一接收器之一第一自主方位與相關聯於該第二接收器之一第二自主方位之間的一差。
- 如請求項21或請求項22之電腦可讀媒體,其中該第一位置資料及/或該第二位置資料包含一共同秒基曆元、一衛星識別符、一接收器識別符、一時間、一平均化自主方位中之一或多者。
- 如請求項21至23中任一項之電腦可讀媒體,其中判定該第二估計相對方位包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
- 如請求項21至24中任一項之電腦可讀媒體,其中判定該第三估計相對方位包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 一種電腦可讀媒體,其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收相關聯於至少兩對衛星之各別雙差估計;形成相關聯於該等雙差估計之一觀測矩陣;及至少部分地自該觀測矩陣界定一解估計。
- 如請求項26之電腦可讀媒體,其中該方法進一步包含界定至少一個模糊度估計。
- 如請求項26或請求項27之電腦可讀媒體,其中該方法進一步包含界定一共變數矩陣。
- 一種電腦可讀媒體,其上儲存有電腦可執行指令,該等電腦可執行指令在一計算裝置上被執行時致使該計算裝置進行一判定相關聯於一第一接收器及一第二接收器之一相對方位的方法,該方法包含:接收至少一個模糊度估計;將該至少一個模糊度估計固定至各別整數模糊度估計;及至少部分地自該(等)整數模糊度估計界定一解。
- 如請求項29之電腦可讀媒體,其中界定該解包含:獲得一第一解估計;捨位該第一解估計;及至少部分地自該經捨位之第一解估計獲得一第二解估計。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ??719310 | 2016-04-22 | ||
| NZ71931016 | 2016-04-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| TW201802492A true TW201802492A (zh) | 2018-01-16 |
Family
ID=60116681
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW106113658A TW201802492A (zh) | 2016-04-22 | 2017-04-24 | 用於監測地面變形的方法及系統 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11163070B2 (zh) |
| AU (1) | AU2017252079A1 (zh) |
| NZ (1) | NZ747152A (zh) |
| TW (1) | TW201802492A (zh) |
| WO (1) | WO2017183005A1 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108537360A (zh) * | 2018-03-01 | 2018-09-14 | 长安大学 | 一种顾及多因子的自适应Kalman滤波滑坡预报方法 |
| US11184831B2 (en) * | 2018-12-31 | 2021-11-23 | Itron, Inc. | Solar-powered relay for coupling remotely-located leaf nodes to a wireless network |
| US11172423B2 (en) | 2018-12-31 | 2021-11-09 | Itron, Inc. | Solar-powered access point for load balancing network traffic across backhaul networks |
| US11296539B2 (en) | 2018-12-31 | 2022-04-05 | Itron, Inc. | Solar hybrid battery for powering network devices over extended time intervals |
| CN110068849A (zh) * | 2019-05-06 | 2019-07-30 | 国网山东省电力公司东营供电公司 | 基于差分定位的输电线路多维形变实时监测方法及系统 |
| CN112073996B (zh) * | 2019-06-10 | 2022-08-09 | 华为技术有限公司 | 一种运营商信息更新方法及装置 |
| US11914051B2 (en) | 2019-11-20 | 2024-02-27 | Tupaia | System and method for determining accurate positions of stationary global navigation satellite system sensors |
| CN111641490B (zh) * | 2020-05-20 | 2021-07-09 | 中国人民解放军国防科技大学 | 一种采样时钟高精度相位校准与时间基准确定方法 |
| CN112180830B (zh) * | 2020-10-13 | 2021-05-25 | 广东省地质建设工程勘察院 | 一种地质灾害预警监测装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5148179A (en) * | 1991-06-27 | 1992-09-15 | Trimble Navigation | Differential position determination using satellites |
| JP2816948B2 (ja) * | 1995-04-20 | 1998-10-27 | 株式会社レイディック | 地すべり地表面移動量測定装置 |
| US5991691A (en) * | 1997-02-20 | 1999-11-23 | Raytheon Aircraft Corporation | System and method for determining high accuracy relative position solutions between two moving platforms |
| US6570530B2 (en) * | 2001-03-05 | 2003-05-27 | Qualcomm Incorporated | Method and apparatus providing improved position estimate based on an initial coarse position estimate |
| JP4116792B2 (ja) * | 2001-12-19 | 2008-07-09 | 古野電気株式会社 | キャリア位相相対測位装置 |
| ITTO20050065A1 (it) * | 2005-02-04 | 2006-08-05 | Sepa Sistemi Elettronici | Sistema e metodo di monitoraggio e sorveglianza di movimenti del terreno, grandi infrastrutture e opere di edilizia civile in genere, basato sui segnali trasmessi dal sistema di navigazione satellitare gps |
| US7702460B2 (en) | 2006-06-17 | 2010-04-20 | Northrop Grumman Guidance And Electronics Company, Inc. | Estimate of relative position between navigation units |
| CN101711369B (zh) * | 2007-06-22 | 2012-11-21 | 特林布尔特拉萨特有限公司 | 位置跟踪设备和方法 |
| US8174437B2 (en) * | 2009-07-29 | 2012-05-08 | Hemisphere Gps Llc | System and method for augmenting DGNSS with internally-generated differential correction |
| US7961145B1 (en) * | 2010-05-07 | 2011-06-14 | Sri International | Method and apparatus for estimating relative position in a global navigation satellite system |
| US9846241B2 (en) * | 2010-07-30 | 2017-12-19 | Deere & Company | Navigation system and method using RTK with data received from a mobile base station |
| JP5884960B2 (ja) * | 2011-03-18 | 2016-03-15 | セイコーエプソン株式会社 | 位置検出システム |
| US9529093B2 (en) * | 2012-10-12 | 2016-12-27 | Google Inc. | Systems and methods for estimating attitude using double differenced GPS carrier phase measurements |
| US9798017B2 (en) * | 2015-04-09 | 2017-10-24 | Topcon Positioning Systems, Inc. | Reducing time and increasing reliability of ambiguity resolution in GNSS |
| WO2019083523A1 (en) * | 2017-10-23 | 2019-05-02 | Deere & Company | VECTOR PHASE LOCKING LOOP ARCHITECTURE RTK |
| WO2019203679A1 (en) * | 2018-04-18 | 2019-10-24 | Limited Liability Company "Topcon Positioning Systems" | High performance positioning system. |
| US11402483B2 (en) * | 2019-01-07 | 2022-08-02 | Niiva OpCo, LLC | Systems and methods to detect motion on sloped surfaces |
-
2017
- 2017-04-24 WO PCT/IB2017/052328 patent/WO2017183005A1/en active Application Filing
- 2017-04-24 US US16/095,401 patent/US11163070B2/en active Active
- 2017-04-24 NZ NZ747152A patent/NZ747152A/en unknown
- 2017-04-24 AU AU2017252079A patent/AU2017252079A1/en not_active Abandoned
- 2017-04-24 TW TW106113658A patent/TW201802492A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| US20190137631A1 (en) | 2019-05-09 |
| WO2017183005A1 (en) | 2017-10-26 |
| AU2017252079A1 (en) | 2018-11-22 |
| US11163070B2 (en) | 2021-11-02 |
| NZ747152A (en) | 2022-01-28 |
| AU2017252079A2 (en) | 2019-03-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TW201802492A (zh) | 用於監測地面變形的方法及系統 | |
| CN103376454B (zh) | 使用精确卫星信息定位的先进全球导航卫星系统(gnss) | |
| Tu et al. | Modeling and performance analysis of precise time transfer based on BDS triple-frequency un-combined observations | |
| KR20210152549A (ko) | 고-무결성 위성 포지셔닝을 위한 시스템 및 방법 | |
| RU2479855C2 (ru) | Зависящее от расстояния уменьшение ошибки при определении местоположения в режиме кинематики реального времени | |
| US20150369924A1 (en) | Method and system for high-accuracy differential tracking of global positioning system (gps) receivers | |
| Lu et al. | Multipath mitigation in GNSS precise point positioning based on trend-surface analysis and multipath hemispherical map | |
| Mercier et al. | Jason-2 DORIS phase measurement processing | |
| WO2006082520A2 (en) | A system and method for monitoring and surveying movements of the terrain, large infrastructures and civil building works in general, based upon the signals transmitted by the gps navigation satellite system | |
| CN107462901B (zh) | 用于从发射器网络发射定位信号的方法和系统 | |
| CN104483691A (zh) | 一种gnss组合精密单点定位方法 | |
| Miller et al. | Multipath effects in GPS receivers: a primer | |
| Martin | GNSS precise point positioning: The enhancement with GLONASS | |
| CN110456391A (zh) | 一种基于北斗geo卫星约束的单站多系统多星硬件延迟计算方法 | |
| Bogusz et al. | GPS-derived height changes in diurnal and sub-diurnal timescales | |
| Chao et al. | Preliminary analysis of BDS-3 data based on iGMAS | |
| Chen et al. | Accuracy evaluation of XUST’s global ionospheric products | |
| CN115308781A (zh) | 基于bdgim辅助的相位平滑伪距高精度时间传递方法 | |
| Zhang et al. | Rapid frequency transfer by BDS-3/GPS PPP with tropospheric augmentation | |
| Mushini et al. | Use of varying shell heights derived from ionosonde data in calculating vertical total electron content (TEC) using GPS–New method | |
| Hedgecock II | Precise real-time relative localization using single-frequency GPS | |
| Yeh et al. | Automatic data-quality monitoring for continuous GPS tracking stations in Taiwan | |
| Das et al. | Simplistic approach for water vapour sensing using a standalone global positioning system receiver | |
| Olds | Small batteryless wireless solar powered GPS receivers for subcentimeter land deformation monitoring | |
| Ou et al. | An improved algorithm for autonomous orbit determination of navigation satellite constellation |