RU61895U1 - Автономная сейсмоакустическая гидрофизическая станция - Google Patents
Автономная сейсмоакустическая гидрофизическая станция Download PDFInfo
- Publication number
- RU61895U1 RU61895U1 RU2006102264/22U RU2006102264U RU61895U1 RU 61895 U1 RU61895 U1 RU 61895U1 RU 2006102264/22 U RU2006102264/22 U RU 2006102264/22U RU 2006102264 U RU2006102264 U RU 2006102264U RU 61895 U1 RU61895 U1 RU 61895U1
- Authority
- RU
- Russia
- Prior art keywords
- hydrophysical
- seismic
- station
- sensor
- acoustic
- Prior art date
Links
Abstract
Автономная сейсмоакустическая гидрофизическая станция (АСАГС) содержит: глубоководный (рабочая глубина 6000 м) носитель аппаратуры (НА), состоящий из двух сферических полусфер стянутых болтами на фланцах, для обеспечения герметичности на специальных канавках, прорезанных по кругу, проложены два уплотнительные резиновые кольца. Внутри НА установлены: на верхней полусфере блок системы ориентации, бортовой вычислительный узел (БВУ), устанавливаемый с помощью приборного кольца; на нижней полусфере источник питания, датчик герметичности, трехкомпонентный сейсмодатчик, прибор срочности (ПС) и размыкатель (исполнительная часть вынесена наружу на специальную площадку нижней полусферы). Снаружи на верхней полусфере, на площадке, установлены низкочастотный гидрофон, ресивер - высокочастотный (приемопередающий гидроакустический датчик), предназначенный для гидроакустической связи, датчик давления (ДД), определяющий текущую глубину погружения станции, датчик температуры, антенна радиолокационного отражателя и радиопередатчика, проблесковый маяк (ПМ), антенна абонентского терминала спутниковой системы связи «Гонец» с космической навигационной системой «ГЛОНАСС» (СССН). За нижнюю полусферу крепится тренога, изготовленная из металлических труб жестко стянутая с помощью исполнительной части размыкателя и болта размыкателя, который затягивается гайкой, на подошву треноги крепятся башмаки-балласты. При этом часть треноги возвращается со станцией, а часть с башмаками-балластами остается на дне. Для измерения гидрофизических и экологических параметров используется «гирлянда» гидрофизических измерительных модулей (ГИМ). «Гирлянда» ГИМ состоит из семи секции.
Description
Техническое решение относится к конструктивному выполнению средств морских сейсмических исследований и может быть использовано для долговременных гидрофизических исследований.
В дальневосточном регионе климат в значительной степени определяется Тихоокеанским регионом особенно Охотским и Японским морями. Здесь формируются и развиваются мощные вихревые образования, которые при взаимодействии с морской поверхностью создают акустический и микросейсмический фон, распространяющиеся на большие расстояния. Гидроакустический фон (подводный шум) состоит из различных компонент. В полосе частот 0,5-10 Гц - это микросейсмический фон, возбуждаемый нелинейным взаимодействием ветрового волнения, это поверхностные волны Релея и Лява, распространяющиеся от удаленных источников, это сейсмические (продольные и поперечные) волны. В полосе частот 10-200 Гц - это подводные шумы локального и удаленного судоходства. В полосе частот 200-4000 Гц - основной вклад вносит ветровое волнение поверхности моря.
На этих морях находятся значительные объемы добываемых биоресурсов. Косяки рыб мигрируют вслед за планктонами, которые предпочитают среду обитания, имеющую определенные температурные параметры.
В настоящее время, на шельфе Охотского моря, омывающего остров Сахалин, обнаружены значительные запасы углеводородов и начато освоение этих запасов. Естественно, разведочные работы и эксплуатация установок по добыче углеводородов на шельфе могут привести к нарушению природного баланса, которые могут привести к экологической катастрофе.
Все это ставит на повестку вопрос проведения в Охотском и Японском морях долговременных наблюдений за гидрофизическими и экологическими параметрами. Для выполнения такого мониторинга необходимы подводные
технические средства. К таким техническим средствам можно отнести предлагаемую модель автономной сейсмоакустической гидрофизической станции (АСАГС).
В качестве прототипа можно рассмотреть автономную донную сейсмическую станцию [Перунов В.В., Малашенко А.Е., Филимонов В.И., Рожков B.C. Автономная донная сейсмическая станция. Патент на полезную модель №49286, 10.11.2005].
Автономная донная сейсмическая станция представляет собой: глубоководный (рабочая глубина 6000 м) носитель аппаратуры (НА), где установлены бортовой вычислительный узел с накопителем информации, источник питания, различные датчики и исполнительные механизмы.
В автономной донной сейсмической станции (АДСС) используется накопитель информации, который содержит четыре информационных канала: на нулевой канал подается сигнал Р с гидрофона; на первый канал - сигнал X; на второй канал - сигнал У; на третий канал - сигнал Z трехкомпонентного сейсмодатчика. АДСС предназначена для регистрации в основном сигналов сейсмического происхождения. На каждый информационный канал, а их 4 канала, длиной реализации 10 мин. требуется массив с объемом 250 Кбайт, за одни сутки на режиме «непрерывный» требуется 36 Мбайта объема памяти. Поэтому для многоканальных гидрофизических систем регистрации, например, 64 канальной системы в АДСС для суточной регистрации понадобился бы объем памяти в 2,3 Гбайта. Для одного года - 820 Гбайта. Требование большого объема памяти при непрерывном режиме регистрации является основным недостатком АДСС.
Сущность предлагаемого технического решения заключается в создании автономной сейсмоакустической гидрофизической станции, где сейсмоакустические каналы ограничиваются регистрацией огибающих сигналов с частотой дискретизации 1 ГЦ тем самым, уменьшая объем регистрируемых массивов в 200 раз по сравнению с АДСС, а на гидрофизические и экологические каналы подаются сигналы со стандартных датчиков установленных на «гирляндах» гидрофизических измерительных модулей.
Автономная сейсмоакустическая гидрофизическая станция (АСАГС), также как АДСС представляет собой (фиг.1): глубоководный (рабочая глубина 6000 м) носитель аппаратуры (НА) 1, состоящий из двух сферических полусфер стянутых болтами 18 на фланцах 17, для обеспечения герметичности на специальных канавках, прорезанных по кругу, проложены два уплотнительные резиновые кольца 16. Внутри НА 1 установлены: на верхней полусфере блок системы ориентации 5, бортовой вычислительный узел (БВУ) 2 устанавливаемый с помощью приборного кольца 19; на нижней полусфере источник питания 3, датчик герметичности 20, трехкомпонснтный сейсмодатчик 4, прибор срочности (ПС) 9 и размыкатель 6 (исполнительная часть вынесена наружу на специальную площадку нижней полусферы). Снаружи на верхней полусфере, на площадке, установлены низкочастотный гидрофон 10, ресивер 11 высокочастотный (приемопередающий гидроакустический датчик), предназначенный для гидроакустической связи, датчик давления (ДД) 14, определяющий текущую глубину погружения станции, датчик температуры 21, антенна 12 радиолокационного отражателя и радиопередатчика, проблесковый маяк (ПМ) 13, антенна 15 абонентского терминала спутниковой системы связи «Гонец» с космической навигационной системой «ГЛОНАСС» (СССН). За нижнюю полусферу крепится тренога 7, изготовленная из металлических труб, жестко стянутая с помощью исполнительной части размыкателя 6 и болта размыкателя 6-1, который затягивается гайкой 6-2, на подошву треноги крепятся башмаки-балласты 8. При этом часть треноги 7-1 возвращается со станцией, а 7-2 с башмаками-балластами 8 остается на дне.
Блок системы ориентации 5 состоит из компасного устройства. Показания с компасного устройства заносятся на локальную память и по команде могут быть переданы на блок гидроакустической связи в бортовом вычислительном узле 2.
Источник питания 3 собран из литиевых аккумуляторных батарей, обеспечивающих в настоящее время максимальную емкость на условную единицу весогабаритных характеристик батарей. Источник питания
установлен таким образом, чтобы центр тяжести собранной станции располагался на нижней полусфере для обеспечения остойчивости станции на поверхности моря.
Датчик герметичности 20 представляет два контакта, которые при взаимодействии с морской водой замыкают цепь. Датчик герметичности располагается на нижней точке нижней полусферы, обеспечивая, таким образом, контроль за герметичностью станции (при обнаружении течи станции замыкается цепь, давая тем самым команду на блок управления исполнительным механизмом размыкателя).
Автономный прибор срочности 9 представляет собой электронный таймер с автономным источником питания для непосредственного приведения в действие исполнительного механизма размыкателя 6 в действие.
Исполнительный механизм размыкателя электромагнитного типа 6 при подаче импульса тока на обмотку электромагнита втягивает сердечник в стакан, при этом сердечник освобождает хвостовик крюка 6-3 и последний под действием силы растяжения проворачивается вокруг своей оси, освобождая серьгу 6-4. Винт 6-5 и гайка 6-2 предназначены для выборки люфта между всплывающей частью треноги 7-1 и частью 7-2, остающейся на дне, что способствует лучшей передаче сейсмических колебаний из грунта на сейсмодатчики.
Для измерения гидрофизических и экологических параметров используется «гирлянда» гидрофизических измерительных модулей (ГИМ). «Гирлянда» ГИМ (фиг.2) состоит из семи секции. Секция представляет собой ГИМ и отрезок измерительного кабеля 22. ГИМ представляет собой аппаратурный модуль 22-9 в виде прочного цилиндрического корпуса, на плоские поверхности вынесены восемь герморазъемов для подключения датчиков 22-1 и два герморазъема 22-2 для ввода сигнальных кабелей 22-3 (по 4 для датчиков и по 1 для кабеля на каждой поверхности), кабель 22-3 закрепляется зажимом 22-8 к ограждению 22-7, для исключения возможности разрыва сигнального кабеля 22-3 проложены два страховочных фала 22-5, страховочные фалы и сигнальный кабель закрепляются друг с другом при помощи зажимов 22-6 и с аппаратурным модулем 22-9 специальным
зажимом 22-4. Для придания отдельной секции положительной плавучести порядка 2 кг аппаратурный модуль 22-9 опоясывается поплавком 22-10. Верхний (последний) аппаратурный модуль 22-9 соединен с помощью страховочных фалов 22-5 с поплавком 23. Расстояние между отдельными ГИМ можно скорректировать в сторону уменьшения, укорачивая с помощью зажимов 22-6 длину страховочных фалов. В предлагаемой полезной модели ГИМ используется как локальный центр сбора информации. Датчики давления и температуры попарно зафиксированы и на определенных расстояниях от ГИМ 22 фиксируются на сигнальном кабеле 22-3 с помощью зажимов. Таких парных датчиков можно разместить четыре (по количеству герморазъемов 22-1). Предполагается установить на верхнем (последнем) аппаратурном модуле установить четыре экологических датчика (Ph, содержания кислорода, фенола, редокса) и два парных датчика (давление-температура). Так как в Охотском море ось подводного звукового канала располагается на глубинах менее 150 м, поэтому ГИМ 22 предполагают устанавливать на глубинах менее 300 м. НА 1 устанавливается на дне моря на глубинах до 6000 м (в абиссальной зоне Охотского моря средняя глубина составляет порядка 3000 м).
АСАГС в развернутом рабочем состоянии представлена на фиг.3. При необходимости АСАГС может быть, с целью оперативной передачи информации, оснащена дополнительно обычным или всплывающим радиобуем 24, как показано на фиг.3Б
Накопитель информации (НИ), входящий в состав бортового вычислительного узла (БВУ) 2, предназначен, прежде всего, для накопления зарегистрированной сейсмоакустической информации и данных с датчиков давления 14, температуры 21, а также данных с «гирлянды» ГИМ. Данные с сейсмодатчика 4 (компоненты X, Y, Z) в полосе частот 0,5-10 ГЦ и с гидрофона 10 в частотных диапазонах 0,5-10 Гц, 10-200 Гц, 200-4000 Гц (фиг.4) усиливаются усилителем 25, выпрямляются детектором 26 и сглаживаются фильтром низких частот 27, далее оцифровываются с помощью АЦП 28 (6-канальный 12-разрядный АЦП) и после этого подаются на формирователь массива данных 29. На формирователь массива данных 29
подаются 12-разрядные цифровые данные с датчиков температуры 21 и давления 14. Аналогично на соответствующие формирователи 29 подаются с каждого ГИМ 22. В формирователе 29 формируется реализация длиной 128 байт, где содержится информация о номерах ГИМ (от 1 до 7, для данных с НА 1 присваивается номер 0). Далее сформированные реализации из восьми формирователей 29 подаются на вход формирователя файла 30, где формируется файл длиной 1024 байт (1 К), наименование файла соответствует текущему времени. И, наконец, сформированный файл подается на накопитель (буферная память ОЗУ 31, затем в энергонезависимом запоминающем устройстве CF 32 и HDD 33).
Система накопления зарегистрированных данных построена на базе одноплатного микрокомпьютера Persior CF-1. CF-1 построен на микроконтроллере МС68СК338 фирмы Motorola, и включает 1Mb flash памяти для данных и программ, а также 250 Kb статического ОЗУ 26.
Для энергонезависимого хранения данных используется карта Compact Flash (CF) 29 объемом от 16 Mb (в предлагаемой полезной модели 256 Mb). CF-1 поставляется с собственной операционной системой Pico DOS, которая позволяет создать на карте Compact Flash файловую систему, совместимую с MS DOS. Для разработки целевых программ использован компилятор Metrowerks Code Warrior Pro C/C++.
В качестве устройства хранения данных используется 2.5 HDD 30 емкостью 40 Гбайт, который подключается к CF-1 через плату расширения Persistor Big IDEA. Программное обеспечение системы накопления данных представляет собой набор трех независимых программ. Они располагаются на трех различных участках флэш-памяти и используются для различных целей. Программа установки параметров накопления Settings позволяет просматривать и устанавливать такие параметры регистрации, как количество каналов (до 64 каналов), частота дискретизации (частота дискретизации в данной полезной модели установлена в 1 Гц), размеров буферов данных, режимы диагностики без перекомпиляции и перезагрузки программы накопления. Длительность регистрации для 64 канального (7
ГИМ × 8 датчиков =56 каналов плюс 8 каналовн НА 1) непрерывного режима записи при частоте дискретизации 1 Гц достигает более 1 года.
В целях снижения энергопотребления в процессе накопления используется трехступенчатый буфер. Данные из АЦП 28 накапливаются в буфере ОЗУ 31. После заполнения этого буфера все его содержимое переносится в буфер большего размера, который расположен в специальном разделе Compact Flash 32. Когда заполнится буфер, расположенный в Compact Flash, включается контроллер HDD 33 и содержимое буфера переносится в файл. После записи файла HDD отключается. Такой цикл автономной станцией повторяется многократно до момента завершения работы.
В БВУ 2 располагаются (фиг.5): программное устройств (ПУ) 40, блок управления исполнительным механизмом размыкателя (УИМ) 39, блок гидроакустической связи (ГАС) 38, блок спутниковой системы связи и навигации (СССН) 41, блок пеленгации и локации (ПЛ) 42.
Программное устройство 40 представляет собой микроконтроллер, который управляет всеми устройствами АДСС по заданной программе или по команде, полученной по гидроакустическому каналу связи, либо радиоканалу (на поверхности).
По сигналу с датчика давления 14 в надводном положении ПУ 29 включает проблесковый маяк (ПМ) 13, блок пеленга и локации (ПЛ) 42, блок СССН 41. Блок пеленга и локации 42 через антенну 12 периодически излучает непрерывный тональный сигнал на частоте стандартного пеленгатора, прерываемый кодированным сообщением, содержащим условный номер станции, одновременно готов отразить локационный сигнал со стандартного судового радиолокатора, позволяющий четко отметить местоположение станции. В подводном положении по сигналу с датчика давления 14 ПУ 40 отключает выше указанные блоки (41 и 42) и включает блок ГАС 38.
ПУ 40 по программе включает или выключает блок ГАС 38, исполняет все команды, получаемые с помощью блока ГАС и при необходимости передает через блок ГАС 38 с помощью ресивера 11 запрашиваемую информацию. Кроме этого ПУ 40 управляет режимами регистрации НИ 34 по заданной программе.
Автономный прибор срочности 9 представляет собой электронный таймер с автономным источником питания не связанный с БВУ 2, непосредственно подающий исполнительному механизму размыкателя 6 необходимый электрический импульс. В заданный момент времени прибор срочности 9 выдает, независимо от программного устройства 40, необходимый электрический импульс исполнительному механизму размыкателя 6.
При превышении данных с датчика давления 14 предельной величины, например, 6000 метров, либо при обнаружении течи с помощью датчика герметичности 20, либо по команде, полученной по гидроакустическому каналу связи с помощью ресивера 11 программное устройство 40 дает команду УИМ 39 на включение исполнительного механизма 6 (т.е. производится сброс балласта).
Блок СССН 41 на поверхности моря с помощью антенны СРНС 15 позволяет обеспечивающему судну, осуществляющему поиск станции, с помощью спутниковой радионавигационной системы JPS определять местонахождение станции. Кроме этого, с помощью блока СССН 41 АСАГС осуществляет на поверхности моря оперативную передачу информации.
Работа АСАГС заключается в следующем.
На борту обеспечивающего судна перед постановкой АСАГС проходит полный цикл подготовки, включающий в себя включение и тестирование различных узлов и блоков, занесение программы работы станции в программное устройство 40, задание времени срабатывания исполнительного механизма 6 на приборе срочности 9. После цикла подготовки АСАГС опускается с борта обеспечивающего судна за борт с помощью выносного крана. С этого момента АСАГС начинает погружение со средней скоростью 1.5-1.6 м/с. Герметичный контейнер 1 (фиг.1), выполненный из алюминиевых сплавов имеет предельную рабочую глубину 6000 м. АСАГС производит придонение на треногу - балласт (7, 8).Через определенное время по команде из ПУ 40 в блоке системы ориентации 5 фиксируется показания компасного устройства, которые заносятся в локальную память блока системы ориентации. Прием сейсмических сигналов производится с помощью
низкочастотного гидрофона 10 и с трех сейсмоприемников 4, ориентированных по трем ортогональным направлениям X, У, Z.
При приеме с обеспечивающего судна команд на блок ГАС 38 по гидроакустическому каналу связи, эти команды исполняются ПУ 40. После завершения программы работ, заложенной в ПУ 40, программное устройство дает команду УИМ 39 на отдачу балласта. В случае не прохождения команды, команда на сброс может быть продублирована с автономного прибора срочности 9. Экстренное всплытие АСАГС может быть осуществлено в случае затскания станции по сигналу от датчика герметичности 20, в случае превышения АСАГС глубины погружения 6000 м по сигналу от датчика давления 14 и по команде, полученной по гидроакустическому каналу связи через блок ГАС 38. После всплытия АСАГС включает проблесковый маяк 13 (в ночное время), начинает передавать радиосигнал пеленга через антенну 12 радиолокационного отражателя и радиопередатчика, кодированный сигнал через антенну СРНС 15. В случае приема сигнала от судового радиолокатора, антенна 12 начинает работу и в режиме активного отражателя. Обнаружив АСАГС, сначала выбирают на борт судна поплавок 24, затем последовательно все ГИМ 22 и в последнюю очередь НА 1 станции. После выборки станции производят серию послепостановочных тестов, далее открывают станцию и осуществляют выемку НИ 34 с целью проведения обработки данных.
Claims (5)
1. Автономная сейсмоакустическая гидрофизическая станция (АСАГС), содержащая устанавливаемый на морском дне глубоководный самовсплывающий носитель аппаратуры (НА), причем НА включает в себя размещенные в герметичном сферическом контейнере бортовой вычислительный узел (БВУ), блок системы ориентации, источник питания, трехкомпонентный сейсмодатчик, а также установленные снаружи герметичного контейнера низкочастотный гидрофон, ресивер для гидроакустической связи, устройство постановки и снятия НА с грунта, средства для поиска всплывшего НА, выполненные в виде проблескового маяка и активного радиолокационного отражателя, отличающаяся тем, что для измерения гидрофизических и экологических параметров используется «гирлянда» гидрофизических измерительных модулей (ГИМ).
2. Автономная сейсмоакустическая гидрофизическая станция по п.1, отличающаяся тем, что в качестве гидрофизических датчиков используются трехкомпонентный сейсмодатчик и гидрофон.
3. Автономная сейсмоакустическая гидрофизическая станция по п.1, отличающаяся тем, что для регистрации огибающих сигналов с сейсмодатчика и гидрофона применяются детекторы и сглаживающие фильтры.
4. Автономная сейсмоакустическая гидрофизическая станция по п.1, отличающаяся тем, что предусмотрена возможность оперативной передачи информации с использованием обычных и всплывающих радиобуев.
5. Автономная сейсмоакустическая гидрофизическая станция по п.1, отличающаяся тем, что используется спутниковая система связи «Гонец» и навигации «Глонасс».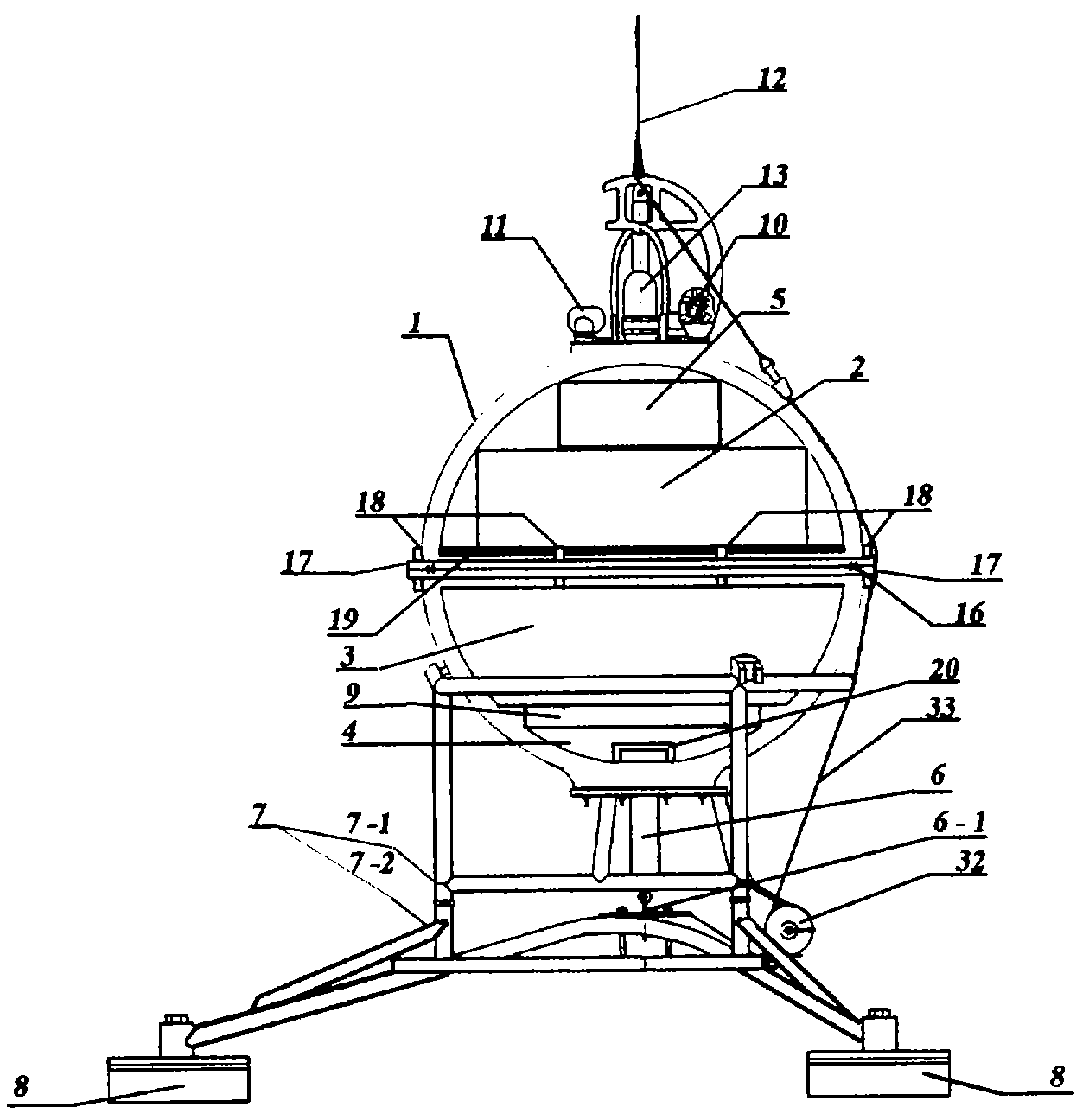
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006102264/22U RU61895U1 (ru) | 2006-01-26 | 2006-01-26 | Автономная сейсмоакустическая гидрофизическая станция |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006102264/22U RU61895U1 (ru) | 2006-01-26 | 2006-01-26 | Автономная сейсмоакустическая гидрофизическая станция |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU61895U1 true RU61895U1 (ru) | 2007-03-10 |
Family
ID=37993513
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006102264/22U RU61895U1 (ru) | 2006-01-26 | 2006-01-26 | Автономная сейсмоакустическая гидрофизическая станция |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU61895U1 (ru) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2540454C2 (ru) * | 2012-05-11 | 2015-02-10 | Федеральное бюджетное государственное учреждение "Специальное конструкторское бюро средств автоматизации морских исследований Дальневосточного отделения Российской академии наук | Малогабаритная автономная сейсмоакустическая станция |
| RU2554283C1 (ru) * | 2014-03-25 | 2015-06-27 | Нина Владимировна Червякова | Малогабаритный донный сейсмический модуль |
| RU2610029C1 (ru) * | 2015-08-25 | 2017-02-07 | Владимир Васильевич Чернявец | Малогабаритная автономная сейсмоакустическая станция |
| RU2650849C1 (ru) * | 2017-03-10 | 2018-04-17 | Владимир Васильевич Чернявец | Автономная сейсмоакустическая станция |
| RU188747U1 (ru) * | 2019-02-11 | 2019-04-23 | Федеральное государственное бюджетное учреждение науки Тихоокеанский океанологический институт им. В.И. Ильичева Дальневосточного отделения Российской академии наук (ТОИ ДВО РАН) | Устройство автономизации гидрофизических приборов |
| RU2783188C1 (ru) * | 2021-10-26 | 2022-11-09 | Российская Федерация, от имени которой выступает Министерство промышленности и торговли Российской Федерации (Минпромторг) | Автономная гидрофизическая станция |
-
2006
- 2006-01-26 RU RU2006102264/22U patent/RU61895U1/ru not_active IP Right Cessation
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2540454C2 (ru) * | 2012-05-11 | 2015-02-10 | Федеральное бюджетное государственное учреждение "Специальное конструкторское бюро средств автоматизации морских исследований Дальневосточного отделения Российской академии наук | Малогабаритная автономная сейсмоакустическая станция |
| RU2554283C1 (ru) * | 2014-03-25 | 2015-06-27 | Нина Владимировна Червякова | Малогабаритный донный сейсмический модуль |
| RU2610029C1 (ru) * | 2015-08-25 | 2017-02-07 | Владимир Васильевич Чернявец | Малогабаритная автономная сейсмоакустическая станция |
| RU2650849C1 (ru) * | 2017-03-10 | 2018-04-17 | Владимир Васильевич Чернявец | Автономная сейсмоакустическая станция |
| RU188747U1 (ru) * | 2019-02-11 | 2019-04-23 | Федеральное государственное бюджетное учреждение науки Тихоокеанский океанологический институт им. В.И. Ильичева Дальневосточного отделения Российской академии наук (ТОИ ДВО РАН) | Устройство автономизации гидрофизических приборов |
| RU2783188C1 (ru) * | 2021-10-26 | 2022-11-09 | Российская Федерация, от имени которой выступает Министерство промышленности и торговли Российской Федерации (Минпромторг) | Автономная гидрофизическая станция |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110422281B (zh) | 海洋物联网智能浮标、水面或水下目标探测系统及其方法 | |
| JP4354686B2 (ja) | 海底設置地震データ収集ステーションを使用する海底の地層の地震データの収集を目的とするシステム | |
| CN1967618B (zh) | 实时传输潜标装置 | |
| CN104267643A (zh) | 水下机器人目标定位识别系统 | |
| CN110562391A (zh) | 一种深海资料浮标系统 | |
| CN104215988A (zh) | 一种水下目标定位方法 | |
| RU2617525C1 (ru) | Заякоренная профилирующая подводная обсерватория | |
| RU61895U1 (ru) | Автономная сейсмоакустическая гидрофизическая станция | |
| CN101793518A (zh) | 走航式多参数综合水体垂直剖面调查系统和方法 | |
| CN209321187U (zh) | 一种自动巡视海洋漂浮平台 | |
| CN111780852B (zh) | 一种实时测量低频换能器深海性能的装置及方法 | |
| RU2650849C1 (ru) | Автономная сейсмоакустическая станция | |
| CN107702698A (zh) | 一种深海逆式回声测量系统及测量方法 | |
| CN114013572A (zh) | 一种多传感器智能海气界面参数观测连续运行工作站 | |
| RU49286U1 (ru) | Автономная донная сейсмическая станция | |
| CN115598217A (zh) | 一种海底沉积层的低频声学特性原位测量装置与方法 | |
| CN101865688B (zh) | 走航式预置地形模式水体垂直剖面调查系统和方法 | |
| RU65251U1 (ru) | Кабельная донная сейсмическая станция | |
| CN210258754U (zh) | 一种用于座底式潜标回收的姿态控制装置 | |
| CN210793529U (zh) | 一种可定位海洋资源快速探测装置 | |
| CN111781648A (zh) | 一种海洋信息探测集群系统及探测方法 | |
| RU2381530C1 (ru) | Морская автономная донная станция для выполнения геофизических и геологоразведочных работ | |
| CN111122985A (zh) | 一种自主式水下电磁信号测量装置及测量方法 | |
| CN108873058B (zh) | 一种海底地震仪样机及实测方法 | |
| RU73499U1 (ru) | Кабельная донная сейсмоакустическая станция |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM1K | Utility model has become invalid (non-payment of fees) |
Effective date: 20080127 |