RU55790U1 - Комплекс для вибропогружения фундаментов опор контактной сети и анкеров - Google Patents
Комплекс для вибропогружения фундаментов опор контактной сети и анкеров Download PDFInfo
- Publication number
- RU55790U1 RU55790U1 RU2006118992/22U RU2006118992U RU55790U1 RU 55790 U1 RU55790 U1 RU 55790U1 RU 2006118992/22 U RU2006118992/22 U RU 2006118992/22U RU 2006118992 U RU2006118992 U RU 2006118992U RU 55790 U1 RU55790 U1 RU 55790U1
- Authority
- RU
- Russia
- Prior art keywords
- hydraulic
- vibrator
- crane
- hydraulic cylinder
- complex according
- Prior art date
Links
Landscapes
- Placing Or Removing Of Piles Or Sheet Piles, Or Accessories Thereof (AREA)
Abstract
Полезная модель относится к области железнодорожного транспорта и предназначена для механизации работ, связанных с обустройством железнодорожного пути, а именно к машинам на железнодорожном ходу для возведения фундаментов опор, таких, например, как опоры контактной сети и т.п., а также анкеров. Комплекс содержит железнодорожную платформу с опорно-поворотным устройством, на котором размещен кран-манипулятор с рабочим органом, причем на платформе дополнительно предусмотрены источник энергоснабжения и гидросистема с возможностью обеспечения функционирования рабочего органа, представляющего собой вибропогружатель, включающий вибратор, содержащий корпус, соединенный с гидравлическим зажимным устройством, смонтированные в корпусе валы со сборными дебалансами, связанные друг с другом синхронизирующими зубчатыми колесами, грузовую траверсу и виброизолятор, установленный между вибропогружателем и краном-манипулятором. Технический результат заключается в повышении производительности, уменьшении энергозатрат, расширении эксплуатационных возможностей, а также повышении надежности комплекса для вибропогружения фундаментов опор контактной сети и анкеров. 7 з.п. ф-лы, 13 ил.
Description
Полезная модель относится к области железнодорожного транспорта и предназначена для механизации работ, связанных с обустройством железнодорожного пути, а именно к машинам на железнодорожном ходу для возведения и извлечения фундаментов опор, таких, например, как опоры контактной сети и т.п., а также различных анкеров, используемых при строительстве железнодорожного пути.
Из уровня техники известно устройство для установки опор, содержащее манипулятор и прикрепленную к нему балочную раму, на противоположных концах которой смонтированы клещевидные узлы для поперечного зажима опоры. За счет расположения этих узлов на существенном расстоянии между собой повышается надежность захвата опоры (см. SU 965947, 15.10.1982).
Однако конструктивная особенность известного устройства усложняет его использование при строго вертикальном опускании длинномерной опоры в значительный по глубине котлован, например, опоры контактной сети. Прежде всего, из-за удаленности друг от друга узлов для зажима. Наличие балочной рамы утяжеляет конструкцию устройства. Кроме того, при установке опоры с изменяющимся продольным профилем (что также имеет место у опоры контактной сети) надежность захвата опоры клещевидными узлами для зажима снижается. Не предусмотрена адаптация к форме поверхности опоры.
Также из уровня техники известно устройство для установки опор контактной сети железнодорожного пути, описанное в известной машине для возведения опор (см. RU 2028407, 09.02.1993), содержащее манипулятор и смонтированный на нем узел для поперечного зажима
опоры, имеющий основание, обжимные ложементы, соединенные с основанием через рычаги, и дистанционный привод поворота рычагов.
Недостаток известного устройства заключается в том, что без помощи дополнительных средств узел для зажима контактной сети не гарантирует удержание ее от сдвига между ложементами при переводе последней посредством манипулятора из горизонтального положения в вертикальное. Это объясняется тем, что непосредственное усилие сжатия опоры ложементами ограничено конструктивными особенностями этой опоры (в частности, по прочности и форме внешней поверхности).
Наиболее близким по технической сущности является комплекс для погружения фундаментов опор контактной сети, представляющий собой машину для возведения фундаментных опор вдоль железнодорожных путей, содержащую железнодорожную платформу, на которой расположена поворотная платформа с кабиной машиниста и силовым агрегатом. На поворотной платформе установлена грузоподъемная стрела с канатным приводом. На стреле смонтирована вертикально устанавливаемая направляющая рама, связанная с приводом ее управления. На направляющей раме для забивания опор смонтировано рабочее оборудование в виде ударного блока с подъемно-опускным механизмом (см. ЕР 0102322, 07.03.1984).
К недостаткам данного технического решения следует отнести невозможность его технического использования при возведении крупногабаритных по высоте и диаметру полых опор контактной сети, которые широко применяются при электрификации железнодорожного транспорта. Это объясняется тем, что рабочее оборудование машины предусматривает ударное воздействие на опору при ее установке. Технология возведения опор контактной сети, выпускаемых в настоящее время, предусматривает их установку в предварительно разработанные котлованы и не допускает на них ударных воздействий.
Целью настоящей полезной модели является создание комплекса для вибропогружения фундаментов опор контактной сети железнодорожного пути и анкеров, лишенного вышеперечисленных недостатков.
Технический результат, достигаемый при реализации настоящей полезной модели, заключается в повышении производительности, уменьшении энергозатрат, расширении эксплуатационных возможностей, а также повышении надежности комплекса для вибропогружения фундаментов опор контактной сети и анкеров.
Указанный технический результат достигается за счет того, что комплекс для вибропогружения фундаментов опор контактной сети и анкеров содержит железнодорожную платформу с опорно-поворотным устройством, на котором размещен кран-манипулятор с рабочим органом, причем на платформе дополнительно предусмотрены источник энергоснабжения и гидросистема с возможностью обеспечения функционирования рабочего органа, представляющего собой вибропогружатель, включающий вибратор, содержащий корпус, соединенный с гидравлическим зажимным устройством, смонтированные в корпусе валы со сборными дебалансами, связанные друг с другом синхронизирующими зубчатыми колесами, грузовую траверсу и виброизолятор, установленный между вибропогружателем и краном-манипулятором.
Выполнение рабочего органа в виде вибропогружателя позволяет значительно повысить производительность предлагаемого комплекса и уменьшить его энергозатраты по сравнению с известными комплексами, оборудованными ударными блоками с подъемно-опускными механизмами за счет исключения холостого хода инерционных масс рабочего органа.
Выполнение рабочего органа в виде вибропогружателя ведет, также, к расширению эксплуатационных возможностей, поскольку позволяет не только устанавливать, но и извлекать раннее установленные опоры.
Повышение надежности комплекса и увеличение срока его эксплуатации достигается за счет применения вибропогружателя с синхронизирующимися реверсивными дебалансами, что позволяет создать вибрационные режимы с большим статическим моментом и низкой частотой и с малым статическим моментом и повышенной частотой, а также наличием виброизолятора, установленного между вибропогружателем и краном-манипулятором.
В зависимости от условий эксплуатации железнодорожная платформа может быть выполнена как самоходной, так и несамоходной.
Для уменьшения энергопотребления в некоторых случаях будет целесообразно осуществлять привод вибратора посредством зубчатой передачи от двух гидромоторов, предусмотренных в упомянутой гидросистеме.
В некоторых случаях будет, также, целесообразно, если валы вибратора со сборными дебалансами будут смонтированы в корпусе вибратора на сферических роликовых подшипниках и будут расположены в одной горизонтальной плоскости, причем на каждом валу будут расположены четыре дебаланса таким образом, что при прямом вращении валов дебалансные массы будут складываются, а при реверсировании вращения дебалансы будут смещаются друг относительно друга на угол 180°, что приведет к уменьшению статического момента и позволит реализовать вибрационные режимы с разными статическими моментами и разной частотой.
Для ускорения рабочего процесса в некоторых случаях будет целесообразно, если гидравлическое зажимное устройство будет состоять из двух зажимных и двух упорных траверс, соединенных между собой, при этом каждая зажимная траверса будет представлять собой сварную конструкцию коробчатого сечения, на верхнем листе каждой зажимной траверсы может быть предусмотрен гидроцилиндр, связанный с
упомянутой гидросистемой и установленный штоком вниз, а внутри каждой зажимной траверсы, непосредственно под гидроцилиндром, может быть закреплена направляющая планка, в вертикальных пазах которой может быть предусмотрен клин, жестко соединенный со штоком гидроцилиндра, причем клин может иметь расположенные наклонно пазы для взаимодействия с клиновой щекой, имеющей прижимную плиту.
В зависимости от условий эксплуатации виброизолятор может быть выполнен гидравлическим и состоять из гидроцилиндра, связанного с упомянутой гидросистемой и пневмогидравлического аккумулятора, соединенного со штоковой полостью гидроцилиндра переходником, причем поршневая и штоковая полости гидроцилиндра могут быть заполнены амортизаторной жидкостью с возможностью создания гидравлической подушки, а газовая полость пневмогидравлического аккумулятора может быть заполнена азотом под давлением 3...4 МПа (30...40 кгс/см) с возможностью реализации функции пружины сжатия.
Также, в зависимости от условий эксплуатации, виброизолятор может быть выполнен в виде комплекта пружин сжатия.
Далее предлагаемая полезная модель будет раскрыта более подробно, со ссылкой на графические материалы, на которых:
фиг.1 - общая принципиальная сема предлагаемого комплекса;
фиг.2 - фиг.4 - принципиальная схема вибропогружателя;
фиг.5 - фиг.8 - принципиальная схема вибратора;
фиг.9 - фиг.10 - принципиальная схема гидравлического зажимного устройства;
фиг.11 - фиг.12 - принципиальная схема гидравлического виброизолятора;
фиг.13 - принципиальная схема пружинного виброизолятора;
Предлагаемый комплекс содержит железнодорожную платформу 1, которая в зависимости от условий эксплуатации может представлять
собой как самоходную, так и несамоходную железнодорожную платформу. На железнодорожной платформе 1 предусмотрено опорно-поворотное устройство 2, на котором размещен кран-манипулятор 3 с рабочим органом 4.
Опорно-поворотное устройство 2 предназначено для изменения положения крапа-манипулятора 3 на железнодорожной платформе 1 в течение рабочего процесса, а также перевода крана-манипулятора 3 из транспортного положения в рабочее и наоборот.
Для специалиста в данной области техники должно быть очевидно, что опорно-поворотное устройство 2 может быть выполнено любым известным способом и иметь любой, подходящий к конкретным условиям эксплуатации, привод, что не является предметом данной заявки.
Кран-манипулятор 3 предназначен для размещения на его стреле 5 рабочего органа 4 и доставки рабочего органа 4 в зону установки и/или извлечения опор.
Совершенно очевидно, что в зависимости от условий эксплуатации может быть использована любая известная модель крана-манипулятора 3. Тоже самое касается стрелы 5 - она может быть как телескопическая с любым известным приводом, так и не телескопическая.
На крюке крана-манипулятора 3 размещается рабочий орган 4.
Для обеспечения энергонезависимости предлагаемого комплекса на железнодорожной платформе 1 может быть предусмотрен автономный источник энергоснабжения 6.
На железнодорожной платформе 1 также может быть предусмотрена гидросистема, включающая гидростанцию с гидромоторами, гидробаками и соответствующей арматурой. Наличие гидросистемы призвано обеспечить работоспособность рабочего органа 4, а также, в случае необходимости, опорно-поворотного устройства 2 и/или крана-манипулятора 3 и/или стрелы 5 и/или железнодорожной платформы 1.
Рабочий орган 4 представляет собой вибропогружатель, который может быть использован для погружения и извлечения с использованием железнодорожного крана-манипулятора любых известных свайных фундаментов и опор контактной сети при обустройстве и ремонте контактной сети железных дорог, а также анкеров.
Вибропогружатель представляет собой вибрационную машину направленного действия, работающую совместно с краном-манипулятором 3 и гидравлической станцией.
Вибропогружатель состоит из вибратора 7, гидравлического зажимного устройства 8, грузовой траверсы 9, виброизолятора 10 (11) и гидрооборудования 12.
Основной частью вибропогружателя является вибратор 7, состоящий из корпуса и вмонтированных в него двух валов с установленными на них шестернями и дебалансами. Привод вибратора осуществляется зубчатой передачей от двух гидромоторов.
Колебания возникают от синхронного вращения двух пар дебалансов, центробежные силы которых уравновешиваются в плоскости, перпендикулярной оси погружаемого элемента, а вдоль оси элемента суммируются и создают знакопеременную возмущающую силу.
Колебания вибратора передаются через жестко закрепленное на нем гидравлическое зажимное устройство 8 погружаемому (извлекаемому) элементу. В зависимости от частоты и направления вращения дебалансных ваплов обеспечиваются различные режимы погружения (извлечения) фундаментов или опор, или анкеров.
Для предотвращения передачи вибрации на кран-манипулятор 3 служат пружинный 10 или гидравлический 11 виброизоляторы, которые навешиваются на крюк крана-манипулятора 3 и соединяются с вибратором 7 с помощью грузовой траверсы 9 и двухветвевых стропов 13.
Вибратор 7 состоит из корпуса, двух валов со сборными дебалансами, установленных в подшипниках и соединенных между собой синхронизирующими зубчатыми колесами, приводных шестерен и гидромоторов.
Два вала 15 смонтированы в корпусе 14 на сферических роликовых подшипниках 16, расположены в одной горизонтальной плоскости и связаны друг с другом с помощью зацепляющихся зубчатых колес 17 и 18, что обеспечивает их синхронное вращение в противоположных направлениях.
На каждом валу расположены четыре дебаланса, в том числе два основных 19 установлены на шпонках и снабжены цапфами 20, а два дополнительных 21 имеют возможность свободно проворачиваться на валах и своими впадинами зацепляться с цапфами основных дебалансов.
При прямом вращении валов дебалансные массы складываются, а при реверсировании вращения дебалансы 19 и 21 смещаются друг относительно друга на угол 180°, что позволяет уменьшить статический момент.
Такое конструктивное исполнение дебаланса позволяет простым реверсированием реализовать вибрационные режимы с большим статическим моментом и низкой частотой и с малым статическим моментом и повышенной частотой.
Привод каждого вала осуществляется от своего гидромотора 22, установленного в корпусе 23. Приводные шестерни 24 смонтированы на шариковых подшипниках 25 и зацепляются с гидромоторами с помощью зубчатых муфт 26.
Смазка зубчатого зацепления привода валов 15 осуществляется окунанием в масляную ванну колес 17, 18, а подшипников 25 и подшипников 16 со стороны привода - масляным туманом, образующимся
при вращении колес 17, 18. Уровень масла в корпусе 23 контролируется по масломерному стеклу 27.
Подшипники 16 с противоположной стороны смазываются консистентной смазкой.
На днище корпуса вибратора приварены четыре тяги для соединения с зажимным устройством, а на боковых листах на цапфах установлены поворотные траверсы 28 для закрепления стропов грузовой траверсы.
Для защиты гидромоторов от механических повреждений служит рама 29.
Гидравлическое зажимное устройство 8 предназначено для захвата и удержания фундамента или опоры или анкера в процессе погружения (извлечения).
Гидравлическое зажимное устройство 8 состоит из двух зажимных 30 и двух упорных 31 траверс, соединенных хвостовиками тяг корпуса вибратора.
Зажимная траверса 30 представляет собой сварную конструкцию коробчатого сечения. На верхнем листе траверсы установлен гидроцилиндр штоком вниз. Внутри зажимной траверсы, непосредственно под гидроцилиндром, закреплены направляющая планка 32, в вертикальных пазах типа "ласточкин хвост" которой перемещается клин 33, жестко соединенный со штоком гидроцилиндра. Клин также имеет пазы типа "ласточкин хвост", расположенные наклонно, с которыми взаимодействует клиновая щека 34 с прижимной плитой 35.
При втягивании штока гидроцилиндра клин 33 поднимается и перемещает вдоль шпонки клиновую щеку 34 вместе с прижимной плитой 35 в направлении фундамента, которая прижимает фундамент к противоположной упорной траверсе 31.
При выдвижении штока клин 33 опускается, перемещает клиновую щеку 34 с прижимной плитой 35 в направлении от фундамента и происходит разжим гидравлического зажимного устройства 8.
Для защиты крана от вибрации используются два типа виброизолятора - гидравлический 11 при температуре до - 20°С или пружинный 10 при температуре до - 40°С.
Гидравлический виброизолятор 11 состоит из гидроцилиндра 36 и пневмогидравлического аккумулятора 37, соединенного со штоковой полостью гидроцилиндра 36 переходником 38. Крепится пневмогидравлический аккумулятор 37 к корпусу гидроцилиндра хомутом 39. На проушине гидроцилиндра 36 закреплена скоба 40 для подвешивания гидравлического виброизолятора 11 на крюк крана-манипулятора 3, а на хвостовике штока гидроцилиндра 36 - проушина для соединения с грузовой траверсой 9.
Поршневая и штоковая полости гидроцилиндра 36 заполнены амортизаторной жидкостью, например, МГП-12. Залитая в поршневую полость через отверстие 41 жидкость в количестве 0,35...0,4 л (соответствует выдвижению штока на ≈20 мм) создает гидравлическую подушку и предотвращает удары поршня по крышке гидроцилиндра.
Газовая полость пневмогидравлического аккумулятора 37 заполнена азотом под давлен нем 3...4 МПа (30...40 кгс/см), который выполняет функции пружины сжатия.
Под действием знакопеременной возмущающей силы, возникающей при вращении дебалансов и направленной вдоль оси гидроцилиндра 36, шток с поршнем совершает возвратно-поступательные движения с частотой колебаний вибратора. При этом рабочая жидкость или вытесняется из штоковой полости в пневмогидравлический аккумулятор 37, сжимая газ (движение колеблющейся массы вниз), или под действием давления в газовой полости возвращает шток с поршнем в исходное
положение (движение колеблющейся массы вверх). Таким образом, колебания навешенной на виброизолятор массы поглощаются пневмогидравлическим аккумулятором и не передаются на подъемные канаты крана-манипулятора и его металлоконструкции.
В отличие от гидравлического, в пружинном виброизоляторе 10 в качестве гасителя колебаний используется комплект пружин сжатия.
Пружинный виброизолятор состоит из подвески 42 с грузовой скобой 43 для навешивания на крюк крана-манипулятора 3, тяги 44 с проушиной для соединения с грузовой траверсой 9 и с закрепленным с помощью гайки корпусом 45, направляющей 46 и комплекта пружин 47, установленных на стяжках 48 между фланцами корпуса 45 и направляющей 46. Для предотвращения соударений подвески и тяги служат резиновые проставив 49. Смазываются трущиеся поверхности тяги и направляющей консистентной смазкой.
В состав гидрооборудования 12 входят гидравлические панели с предохранительными клапанами КП1, КП2 и гидрозамками ЗМ1 и ЗМ2, приводные гидромоторы 22, гидрозамок ЗМЗ и пневмогидроаккумулятор АК1. Все перечисленное оборудование, кроме гидромоторов 22, размещено в пространстве между вибратором 7 и гидравлическим зажимным устройством 8. Подвод и слив рабочей жидкости осуществляется через быстроразъемные соединения МР1...МР5.
Для обеспечения низкочастотного и высокочастотного режимов вибрации гидромоторы 22 соединены по параллельно-последовательной схеме.
При параллельном соединении рабочая жидкость через разъем МР1 подается одновременно к обоим гидромоторам 22.
Слив рабочей жидкости с первого гидромотора происходит непосредственно через разъем МР2, а со второго гидромотора через
гидрозамок ЗМ1, который открывается под действием давления в напорной магистрали, и разъем МР2.
При последовательном соединении поток рабочей жидкости от разъема МР2 направляется только к первому гидромотору, который с удвоенной частотой вращает свой дебалансный вал, через синхронизирующие шестерни второй дебалансный вал и второй гидромотор. При этом второй гидромотор включается в сливную магистраль первого гидромотора через гидрозамок ЗМ2, который открывается под действием давления в напорной магистрали. Второй гидромотор, работая в режиме гидронасоса, перекачивает рабочую жидкость в слив через разъем МР1.
При включении операции "Зажим" рабочая жидкость через разъем МР4 и гидрозамок ЗМЗ подается в штоковые полости гидроцилиндров Ц1, Ц2 гидравлического зажимного устройства и в пневмогидроаккумулятор АК1. Штоки гидроцилиндров, втягиваясь, воздействуют на клиновые механизмы гидравлического зажимного устройства, которые захватывают оголовок фундамента с усилием, ограниченным предохранительным клапаном КПЗ. Одновременно происходит зарядка пневмогидроаккумулятора АК1.
При выключении операции гидрозамок ЗМЗ закрывается и пневмогидроаккумулятор АК1 поддерживает постоянное усилие зажатия погружаемых (извлекаемых) фундаментов.
Слив рабочей жидкости из поршневых полостей гидроцилиндров осуществляется через разъем МР5.
При включении операции "Разжим" рабочая жидкость через разъем МР5 подается в поршневые полости гидроцилиндров. Выдвигаясь, штоки воздействуют на клиновые механизмы гидравлического зажимного устройства, которые освобождают оголовок фундамента.
Слив рабочей жидкости из штоковых полостей осуществляется через гидрозамок ЗМЗ, который открывается давлением в напорной магистрали, и разъем МР4.
Предлагаемый комплекс работает следующим образом.
Железнодорожная платформа подается к месту проведения работ самостоятельно или с помощью буксировки. На железнодорожной платформе может быть предусмотрено место для складирования предназначенных для установки или извлечения опор (фундамента) или может быть предусмотрена дополнительная грузовая платформа для указанных целей.
Кран-манипулятор с рабочим органом переводятся из транспортного в рабочее положение, для чего должны быть задействованы источник энергоснабжения и гидросистема.
Цикл работ по погружению, например, фундаментов (опор) включает:
- захват фундамента (опоры) гидравлическим зажимным устройством вибропогружателя;
- подъем фундамента (опоры) и нацеливание на отметку погружения;
- опускание фундамента (опоры) в направляющий котлован до упора в грунт и погружение до заданной отметки с обеспечением его вертикальности с помощью крана-манипулятора;
- освобождение гидравлического зажимного устройства и снятие вибропогружателя с фундамента (опоры).
Цикл работ по извлечению фундаментов (опор) включает:
- нацеливание на извлекаемый фундамент (опору);
- захват фундамента (опоры) гидравлическим зажимным устройством вибропогружателя;
- извлечение фундамента (опоры);
- укладка фундамента (опоры) на землю.
Погружение фундаментов (опор) производится в режимах высокочастотной и низкочастотной вибрации, при этом режим выбирается в зависимости от скорости погружения.
Изменение режима погружения обеспечивается реверсированием приводных гидромоторов вибропогружателя с помощью гидрораспределителя насосной станции.
Погружение в начальный момент и до устойчивого положения фундамента (опоры) должно производиться только в режиме высокочастотной вибрации.
Извлечение фундаментов (опор) должно производиться только в режиме высокочастотной вибрации.
Порядок выполнения операций при погружении фундаментов (опор):
- уложить краном-манипулятором вибропогружатель на ровную площадку;
- застропить фундамент (опору) по центру массы и завести его краном-манипулятором в гидравлическое зажимное устройство вибропогружателя;
- включить гидрораспределителем насосной станции операцию "Зажим" и зажать фундамент (опору);
- поднять вибропогружатель с фундаментом (опорой) и установить последний в подготовленный направляющий котлован до упора в грунт, не ослабляя грузовых стропов;
- проверить вертикальность фундамента (опоры);
- включить гидрораспределителем насосной станции вибропогружатель в высокочастотном режиме и начать медленно опускать вибропогружатель с фундаментом (опорой);
- для обеспечения вертикального погружения не допускать ослабления грузовых стропов;
- после погружения фундамента (опоры) на 1,2...1,5 м выключить вибропогружатель;
- опустить грузовую траверсу с виброизолятором на 300...400 мм;
- включить вибропогружатель в низкочастотном режиме и продолжать опускание крюковой обоймы со скоростью погружения фундамента (опоры), не допуская натяжения грузовых стропов;
- после погружения фундамента на заданную глубину включить операцию "Разжим" и поднять вибропогружатель с оголовка фундамента (опоры).
Порядок выполнения операций при извлечении фундаментов (опор):
- установить краном-манипулятором вибропогружатель на оголовок фундамента (опоры);
- включить гидрораспределителем насосной станции операцию "Зажим" и зажать оголовок фундамента (опоры);
- опустить краном грузовую траверсу с виброизолятором на 100...200 мм (ослабить стропы грузовой траверсы);
- включить гидрораспределителем насосной станции вибропогружатель в низкочастотном режиме и убедиться, что фундамент (опора) сдвинулся с места, после чего выключить вибропогружатель;
- включить вибропогружатель в высокочастотном режиме;
- включить механизм подъема крана-манипулятора и натянуть грузовые стропы;
- извлекать до тех пор, пока в грунте останется часть фундамента (опоры) длиной 0,4...0,5 м для анкера или 1...1,2 м для стакана, после чего выключить вибропогружатель и продолжать подъем;
- уложить вибропогружатель с извлеченным фундаментом (опорой) на подготовленную площадку;
- включить гидрораспределителем насосной станции операцию "Разжим" и освободить оголовок фундамента (опоры);
- уложить грузовую траверсу в ложемент;
- застропить фундамент (опору) по центру массы и с помощью крана-манипулятора вывести фундамент (опору) из гидравлического зажимного устройства вибропогружателя;
- уложить фундамент (опору) в отведенное место.
Таким образом, предлагаемые конструкция и компоновка заявляемого комплекса для вибропогружения фундаментов опор контактной сети и анкеров являются простыми и надежными, способствующими повышению производительности, уменьшению энергозатрат и расширению ее эксплуатационных возможностей.
Claims (8)
1. Комплекс для вибропогружения фундаментов опор контактной сети и анкеров, содержащий железнодорожную платформу с опорно-поворотным устройством, на котором размещен кран-манипулятор с рабочим органом, отличающийся тем, что на платформе дополнительно предусмотрены источник энергоснабжения и гидросистема с возможностью обеспечения функционирования рабочего органа, представляющего собой вибропогружатель, включающий вибратор, содержащий корпус, соединенный с гидравлическим зажимным устройством, смонтированные в корпусе валы со сборными дебалансами, связанные друг с другом синхронизирующими зубчатыми колесами, грузовую траверсу и виброизолятор, установленный между вибропогружателем и краном-манипулятором.
2. Комплекс по п.1, отличающийся тем, что железнодорожная платформа выполнена самоходной.
3. Комплекс по п.1, отличающийся тем, что железнодорожная платформа выполнена несамоходной.
4. Комплекс по п.1, отличающийся тем, что привод вибратора осуществляется зубчатой передачей от двух гидромоторов, предусмотренных в упомянутой гидросистеме.
5. Комплекс по п.1, отличающийся тем, что валы вибратора со сборными дебалансами смонтированы в корпусе вибратора на сферических роликовых подшипниках и расположены в одной горизонтальной плоскости, причем на каждом валу расположены четыре дебаланса таким образом, что при прямом вращении валов дебалансные массы складываются, а при реверсировании вращения дебалансы смещаются друг относительно друга на угол 180°.
6. Комплекс по п.1, отличающийся тем, что гидравлическое зажимное устройство состоит из двух зажимных и двух упорных траверс, соединенных между собой, при этом каждая зажимная траверса представляет собой сварную конструкцию коробчатого сечения, на верхнем листе каждой зажимной траверсы предусмотрен гидроцилиндр, связанный с упомянутой гидросистемой и установленный штоком вниз, а внутри каждой зажимной траверсы, непосредственно под гидроцилиндром, закреплена направляющая планка, в вертикальных пазах которой предусмотрен клин, жестко соединенный со штоком гидроцилиндра, причем клин имеет расположенные наклонно пазы, предусмотренные для взаимодействия с клиновой щекой, имеющей прижимную плиту.
7. Комплекс по п.1, отличающийся тем, что виброизолятор выполнен гидравлическим и состоит из гидроцилиндра, связанного с упомянутой гидросистемой и пневмогидравлического аккумулятора, соединенного со штоковой полостью гидроцилиндра переходником, причем поршневая и штоковая полости гидроцилиндра заполнены амортизаторной жидкостью, имеющей возможность создания гидравлической подушки, а газовая полость пневмогидравлического аккумулятора заполнена азотом.
8. Комплекс по п.1, отличающийся тем, что виброизолятор представляет собой комплект пружин сжатия.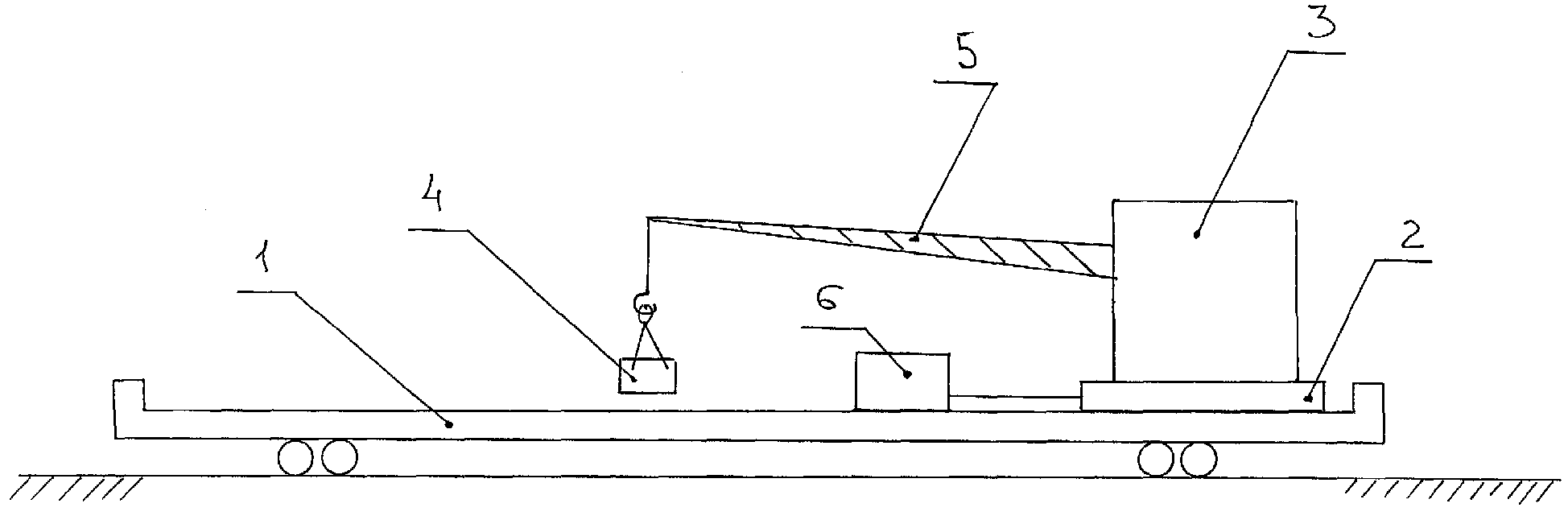
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006118992/22U RU55790U1 (ru) | 2006-06-01 | 2006-06-01 | Комплекс для вибропогружения фундаментов опор контактной сети и анкеров |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006118992/22U RU55790U1 (ru) | 2006-06-01 | 2006-06-01 | Комплекс для вибропогружения фундаментов опор контактной сети и анкеров |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU55790U1 true RU55790U1 (ru) | 2006-08-27 |
Family
ID=37061712
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006118992/22U RU55790U1 (ru) | 2006-06-01 | 2006-06-01 | Комплекс для вибропогружения фундаментов опор контактной сети и анкеров |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU55790U1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU185020U1 (ru) * | 2018-02-20 | 2018-11-19 | Общество с ограниченной ответственностью "ВИБРОБУРТЕХНИКА" | Машина на железнодорожном ходу для установки и погружения свай и свайных фундаментов опор контактной сети |
-
2006
- 2006-06-01 RU RU2006118992/22U patent/RU55790U1/ru not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU185020U1 (ru) * | 2018-02-20 | 2018-11-19 | Общество с ограниченной ответственностью "ВИБРОБУРТЕХНИКА" | Машина на железнодорожном ходу для установки и погружения свай и свайных фундаментов опор контактной сети |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102425372B (zh) | 振动钻进式冲挖钻机 | |
| CN104452732A (zh) | 变电站地基自走式打夯装置 | |
| US3280924A (en) | Vibrating machine for plunging piles, thin-walled clindrical casings and plates | |
| CN207332754U (zh) | 电线杆挖坑立杆一体化装置 | |
| WO2015014163A1 (zh) | 一种带有新型支架的游梁式抽油机 | |
| CN105256801B (zh) | 一种堤坝溃口快速射桩机及射桩方法 | |
| CN215367279U (zh) | 一种打桩机 | |
| RU55790U1 (ru) | Комплекс для вибропогружения фундаментов опор контактной сети и анкеров | |
| RU2139978C1 (ru) | Установка для бетонирования набивных свай | |
| CN220847511U (zh) | 一种应用于小空间的土石回填碾压震动装置 | |
| RU61723U1 (ru) | Комплекс для вибропогружения фундаментов опор контактной сети и анкеров | |
| CN218233460U (zh) | 一种工程建筑打桩装置 | |
| CN202417302U (zh) | 振动钻进式冲挖钻机 | |
| RU73349U1 (ru) | Вибропогружатель дебалансный с регулируемыми параметрами | |
| CN104005411B (zh) | 一种筒桩的施工方法及其桩筒结构 | |
| CN114809142B (zh) | 一种深基坑垂直挖土装置 | |
| CN214657018U (zh) | 一种适用于桩工机械的振动锤 | |
| CN105604060B (zh) | 一种堤坝溃口射桩机及其射桩方法 | |
| CN207685881U (zh) | 一种适用于狭窄场地的钢支撑移架装置 | |
| CN105970959A (zh) | 一种建筑专用的打桩机 | |
| CN117905062B (zh) | 一种高稳定性的静压桩设备 | |
| RU176503U1 (ru) | Универсальное оборудование для погружения винтовых свай | |
| RU81211U1 (ru) | Подвижная ж/д установка для вибропогружения свайных фундаментов опор контактной сети | |
| CN116240887B (zh) | 一种桥梁施工振动沉桩机 | |
| CN218090843U (zh) | 低净空振动沉管打桩机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM1K | Utility model has become invalid (non-payment of fees) |
Effective date: 20070602 |