RU2766373C1 - Устройство для мониторинга систем электрического обогрева трубопроводов - Google Patents
Устройство для мониторинга систем электрического обогрева трубопроводов Download PDFInfo
- Publication number
- RU2766373C1 RU2766373C1 RU2021121099A RU2021121099A RU2766373C1 RU 2766373 C1 RU2766373 C1 RU 2766373C1 RU 2021121099 A RU2021121099 A RU 2021121099A RU 2021121099 A RU2021121099 A RU 2021121099A RU 2766373 C1 RU2766373 C1 RU 2766373C1
- Authority
- RU
- Russia
- Prior art keywords
- housings
- monorail
- movable
- housing
- information collection
- Prior art date
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/028—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members having wheels and mechanical legs
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L55/00—Devices or appurtenances for use in, or in connection with, pipes or pipe systems
- F16L55/26—Pigs or moles, i.e. devices movable in a pipe or conduit with or without self-contained propulsion means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F17—STORING OR DISTRIBUTING GASES OR LIQUIDS
- F17D—PIPE-LINE SYSTEMS; PIPE-LINES
- F17D5/00—Protection or supervision of installations
- F17D5/02—Preventing, monitoring, or locating loss
- F17D5/06—Preventing, monitoring, or locating loss using electric or acoustic means
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
Изобретение относится к диагностирующему оборудованию, в частности к робототехническим устройствам для мониторинга систем электрического обогрева, используемых для транспортных трубопроводов в нефтегазовой промышленности. Устройство состоит из отдельных цилиндрических корпусов, соединенных между собой шарниром и гермокабелем. В нижней части корпусов жестко закреплены опоры, на которых установлены подвижные крепления для опорных колёс, опоры развернуты на 120° относительно друг друга. Амортизаторы жестко закреплены на корпусе и соединены через подвижную платформу с возможностью перемещения вверх и вниз с подвижным креплением. Привод установлен внутри корпуса и соединен через питающие кабели с креплением к монорельсу. Внутри подвижного крепления установлена зубчато-ремённая передача, малый шкив которой соединен с опорным колесом. В верхней части корпусов установлены крепления к монорельсу, в верхней части которого закреплен токоприемник. В крышке передней части корпуса модуля сбора информации выполнены отверстия в центре для установки фронтальной видеокамеры, а ниже - отверстия меньшего диаметра для установки температурного датчика и полупроводниковых диодов. Данное робототехническое устройство позволяет наблюдать за системами электрического нагрева даже в искривлённых участках трубопроводов. Фронтальная камера позволяет наблюдать за большой площадью, так как она находится в передней части устройств, и ее угол обзора ничем не ограничен. Робот не имеет ограничений по времени использования, так как питается напрямую и не зависит от аккумуляторов. Также он имеет высокую скорость прохождения трубы благодаря жестким креплениям к монорельсу и опорным колесам с надежными упорами к внутренним стенкам трубопровода. 5 ил.
Description
Изобретение относится к диагностирующему оборудованию, в частности к робототехническим устройствам для мониторинга систем электрического обогрева, используемых для транспортных трубопроводов в нефтегазовой промышленности.
Известен робот для технического контроля трубопроводов и сложных изгибных участков труб (патент РФ №2707306, опубл. 26.11.2019), включающее несущее основание с опорными колесами, электродвигатели с колесами, видеокамеру, светодиоды и расположенные в основании источник питания и материнскую плату. Несущее основание выполнено в виде замкнутого цилиндра с дополнительным электродвигателем, который соединен с обеих сторон посредством валов с электродвигателями с колесами.
Недостатками данного устройства является недостаточное время автономной работы, обусловленное малой емкостью аккумуляторной батареи, ограниченный угол обзора видеокамеры ввиду ее установки за границами полусфер.
Известен автономный адаптивно шагающий робот для диагностики газопроводов (патент РФ №2571242, опубл. 20.12.2015), который выполнен в виде аэродинамического тела с пропеллером, на поверхности которого расположен узел перемещения, состоящий из не менее трех шайб. На каждой шайбе установлены узлы подвески, которые установлены с возможностью упора в стенки газопровода.
Недостатками устройства являются низкая автономность при эксплуатации устройства в газопроводах с высокими значениями скорости потока газа из-за чувствительности пропеллера, недостаточная устойчивость блока перемещения из-за малой площади соприкосновения опорных блоков и внутренней полости трубопровода.
Известен змееподобный робот (патент РФ №183886, опубл. 08.10.2018), который состоит из жестко соединенных между собой однотипных элементов, включающие в себя два звена и расположенный между ними механизм продольно-поступательного перемещения, соединяющий оси вращения секторов конического зубчатого колеса на звеньях элемента.
Недостатком устройства является, необходимость использования в конструкции робота тяговых приводов с высокими силомоментными характеристиками, что увеличивает энергопотребление и как следствие уменьшает время автономной работы устройства.
Известен робот для диагностики трубопроводов (патент РФ №142123, опубл. 20.06.2014), который состоит из самоходной тележки с несущей конструкцией и двигателями с опорными колесами, манипулятором с двумя степенями свободы, видеокамерой, ультразвуковыми и инфракрасными дальномерами, импульсным преобразователем напряжения, источником питания, материнской платой, реализующей управление роботом, стойками с шарнирными механизмами, соединенные пружинами попарно между собой и крышкой, на которой расположены маленькие колеса - прижимы для прижатия робота к поверхности трубы, при этом двигатели, ультразвуковые и инфракрасные дальномеры, импульсный преобразователь напряжения, источник питания, материнская плата расположены внутри несущей конструкции, а дальномеры и видеокамера передают информацию на материнскую плату, которая выполнена с возможностью передачи сигналов на манипулятор, видеокамеру и двигатели с опорными колеса.
Недостатком устройства является неустойчивость самоходной тележки на трубопроводе ввиду нулевого развала основных опорных колес самоходной тележки к верхней образующей трубопровода.
Известен универсальный диагностический снаряд-дефектоскоп для контроля за состоянием трубопровода (патент РФ №2111453, опубл. 20.05.1998), принятый за прототип, который содержит состоящий из размещенных в отдельных корпусах, соединенных между собой карданами и гермокабелями и снабженных манжетами и каретками секций магнитной, ультразвуковой и энергетической с генераторной установкой, отличающийся тем, что в него введена соединенная с энергетической и ультразвуковой секциями секция навигационных и высотно-плановых отметок, представляющая собой герметичный корпус, внутри которого размещен навигационный модуль, включающий командный прибор с трехосным гиростабилизатором, цифровой вычислительный комплекс и блок регистрирующей аппаратуры, а энергетическая секция дополнительно снабжена буферной подзаряжаемой аккумуляторной батареей, функциональным датчиком давления и блоком автоматики, включающим релейные группы.
Недостатком устройства является низкая скорость прохождения участков трубопровода из-за трения одометров о внутренние стенки трубопровода и значительной массы всех секций дефектоскопа, невозможность преодоления дефектоскопом сложных участков трубопровода ввиду отсутствия блоков управления инспекционным снарядом.
Техническим результатом является создание устройства для мониторинга систем электрического обогрева трубопроводов по всей его длине и способного преодолевать сложные участки СКИН-систем.
В устройстве для мониторинга систем электрического обогрева трубопроводов, состоящем из отдельных корпусов, соединенных между собой гермокабелем, технический результат достигается тем, что корпуса модуля сбора информации и модуля передачи данных выполнены в форме цилиндра, в передней и задней части которых на боковых стенках жестко закреплены выступы, крышки с выполненными пазами, которые установлены с двух сторон каждого из корпусов, в нижней части корпусов жестко закреплены опоры, на которых с возможностью съема установлены подвижные крепления для опорных колес, при этом они развернуты на 120° относительно друг друга, амортизаторы жестко закреплены на корпусе и соединены через подвижную платформу с возможностью перемещения вверх и низ с подвижным креплением, привод установлен внутри корпуса и соединен через питающие кабели с креплением к монорельсу, внутри подвижного крепления установлена зубчато-ременная передача, которая состоит из большого шкива, который соединен с приводом, а малый шкив - с опорным колесом, в верхней части корпусов жестко закреплены опоры, на которых с возможностью съема установлены крепления к монорельсу, в верхней части которого закреплен токоприемник, в крышке, которая установлена в передней части корпуса модуля сбора информации выполнены отверстия в центре для установки фронтальной видеокамеры, а ниже отверстия меньшего диаметра для установки температурного датчика и полупроводниковых диодов, модули передачи данных и сбора информации соединены между собой шарниром, внутри модуля сбора информации установлены фронтальная видеокамера, в которую встроены полупроводниковые диоды и датчик температуры, которые, соединены через гермокабели с блоком связи, внутри модуля передачи данных установлены приводы и блок связи, приводы, фронтальная видеокамера и блок связи соединены через питающие кабели с токоприемником.
Устройство поясняется следующей фигурой:
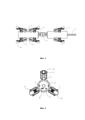
фиг. 1 - общий вид устройства;
фиг. 2 - вид с боку;
фиг. 3 - вид снизу;
фиг. 4 - вид спереди;
фиг. 5 - зубчато-ременный механизм;
1 - монорельс;
2 - модуль сбора информации;
3 - модуль передачи данных;
4 - шарнир;
5 - гермокабель;
6 - подвижные крепления;
7 - амортизаторы;
8 - фронтальная видеокамера;
9 - крепление к монорельсу;
10 - полупроводниковые диоды
11 - датчик температуры;
12 - токоприемник;
13 - приводы;
14 - блок связи;
15 - пазы;
16 - крышки;
17 - опоры;
18 - питающие кабели;
19 - опорные колеса;
20 - большой шкив;
21 - малый шкив;
22 - зубчатый ремень;
23 - подвижная платформа.
Устройство для мониторинга систем электрического обогрева трубопроводов включает модуль сбора информации 2 (фиг. 1-5) и модуль передачи данных 3. Корпус модуля сбора информации 2 и модуля передачи данных 3, выполнены в форме цилиндра в передней и задней части на боковых стенках жестко закреплены выступы. Крышки 16 с выполненными пазами 15, которые установлены с двух сторон каждого из корпусов. В нижней части корпуса модуля сбора информации 2 и модуля передачи данных 3, жестко закреплены опоры 17, на них с возможностью съема установлены подвижные крепления 6 для опорных колес 19. Подвижные крепления 6 развернуты на 120° относительно друг друга. Расположение в 120° друг от друга обусловлено тем, что устройство обладает тремя точками опоры, которые должны быть равномерно распределены по поверхности цилиндра. При 120° износ колес и креплений минимален. Также при меньшем угле между колесами уменьшается устойчивость на поворотах, а при большем угле уменьшается стабильность при движении и увеличивается износ подвижного крепления 9 к монорельсу 1. На корпусе жестко закреплены амортизаторы 7 соединенные через подвижную платформу 23 с возможностью перемещения вверх и низ с подвижным креплением 6 для обеспечения возможности упора колес в стенки трубопровода. Привод 13 установлен внутри корпуса и соединен через питающие кабели 18 с креплением к монорельсу 9. Внутри подвижного крепления 6 находится зубчато-ременная передача, которая состоит из большого шкива 20, малого шкива 21 и зубчатого ремня 22. Большой шкив 20 соединен с приводом 13, а малый шкив 21 - с опорным колесом 19. В верхней части корпуса модуля сбора информации 2 и модуля передачи данных 3 жестко закреплены опоры 17, на них с возможностью съема установлены крепления к монорельсу 9. В верхней части крепления к монорельсу 9 установлен токоприемник 12. В передней части корпуса модуля сбора информации 2 в крышке выполнены отверстия в центре для установки фронтальной видеокамеры 8, а ниже отверстия меньшего диаметра для установки температурного датчика 11 и полупроводниковых диодов 10 для освещения.
Внутри модуля сбора информации 2 установлены два привода 13 и фронтальная видеокамера 8, в которую встроены полупроводниковые диоды 10 и датчик температуры 11. Фронтальная видеокамера 8 соединена через гермокабели 5 с блоком связи 14. Датчик температуры 11 соединен через гермокабели 5 с блоком связи 14.
Внутри модуля передачи данных 3 установлены четыре привода и блок связи 14. Приводы 13, фронтальная видеокамера 8 и блок связи 14 соединены через питающие кабели 18.
Модуль передачи данных 3 соединен с модулем сбора информации 2 при помощи шарнира 4, который обеспечивает подвижность блоков относительно друг друга.
Мониторинг осуществляется следующим образом. Устройство устанавливают внутри трубопровода СКИН-системы, на монорельс 1 и его соединяют с помощью крепление к монорельсу 9, которые обеспечивает устойчивое положение робота при движении внутри трубопровода. На монорельс 1 подается ток, токоприемник 12 соприкасается с монорельсом, в результате чего электрическая энергия от рельса передается на приводы 13 через питающие кабели 18. Привод 13 приводит в движение большой шкив 20, который вращает с помощью зубчатого ремня 22 малый шкив 21, а тот в свою очередь приводит в движение опорное колесо 19, в результате чего устройство перемещается по монорельсу 1 внутри трубопровода за счет креплений 9, жестко присоединенных к опорам 17 на корпусах блока сбора информации 2 и блока передачи данных 3. Подвижные крепления 6 опорных колес обеспечивают прохождение искривленных участков трассы за счет амортизаторов 7, соединенных с подвижным креплением 6 через подвижную платформу 23, позволяющую перемещаться вверх и вниз. Прохождение кривых поворота и участков сложной конфигурации достигается за счет шарнира 4, соединяющего модуль сбора информации 2 и модуль передачи информации 3, и гибкого гермокабеля 5. В процессе движения по трассе трубопровода видеофиксация внутренней поверхности с интеллектуальным распознаванием дефектов осуществляется фронтальной видеокамерой 8 с полупроводниковыми диодами 10, освещающими внутреннюю полость трубопровода. По ходу трассы датчик температуры 11 фиксирует температуру внутри СКИН-трубы, информация сохраняется на накопителе и в дальнейшем анализируется в ходе камеральной обработки. Участки с пониженной температурой свидетельствуют о нарушении герметичности конструкции теплоизоляции или о ее повышенной влажности.
Устройство обладает рядом преимуществ перед предшествующими моделями. Данное робототехническое устройство позволяет наблюдать за системами электрического нагрева даже в искривленных участках трубопроводов в силу своей конструкции. Также фронтальная камера позволяет наблюдать за большой площадью, так как она находится в передней части устройств, и ее угол обзора ничем не ограничен. Робот не имеет ограничений по времени использования, так как питается напрямую и не зависит от аккумуляторов. Также он имеет высокую скорость прохождения трубы благодаря жестким креплениям к монорельсу и опорным колесам с надежными упорами к внутренним стенкам трубопровода.
Claims (1)
- Устройство для мониторинга систем электрического обогрева трубопроводов, состоящее из отдельных корпусов, соединенных между собой гермокабелем, отличающееся тем, что корпуса модуля сбора информации и модуля передачи данных выполнены в форме цилиндра, в передней и задней частях которых на боковых стенках жестко закреплены выступы, крышки с выполненными пазами, которые установлены с двух сторон каждого из корпусов, в нижней части корпусов жестко закреплены опоры, на которых с возможностью съема установлены подвижные крепления для опорных колёс, при этом они развернуты на 120° относительно друг друга, амортизаторы жестко закреплены на корпусе и соединены через подвижную платформу с возможностью перемещения вверх и вниз с подвижным креплением, привод установлен внутри корпуса и соединен через питающие кабели с креплением к монорельсу, внутри подвижного крепления установлена зубчато-ремённая передача, которая состоит из большого шкива, который соединен с приводом, а малый шкив – с опорным колесом, в верхней части корпусов жестко закреплены опоры, на которых с возможностью съема установлены крепления к монорельсу, в верхней части которого закреплен токоприемник, в крышке, которая установлена в передней части корпуса модуля сбора информации, выполнены отверстия в центре для установки фронтальной видеокамеры, а ниже - отверстия меньшего диаметра для установки температурного датчика и полупроводниковых диодов, модули передачи данных и сбора информации соединены между собой шарниром, внутри модуля сбора информации установлена фронтальная видеокамера, в которую встроены полупроводниковые диоды и датчик температуры, которые соединены через гермокабели с блоком связи, внутри модуля передачи данных установлены приводы и блок связи, приводы, фронтальная видеокамера и блок связи соединены через питающие кабели с токоприемником.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2021121099A RU2766373C1 (ru) | 2021-07-16 | 2021-07-16 | Устройство для мониторинга систем электрического обогрева трубопроводов |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2021121099A RU2766373C1 (ru) | 2021-07-16 | 2021-07-16 | Устройство для мониторинга систем электрического обогрева трубопроводов |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2766373C1 true RU2766373C1 (ru) | 2022-03-15 |
Family
ID=80736585
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2021121099A RU2766373C1 (ru) | 2021-07-16 | 2021-07-16 | Устройство для мониторинга систем электрического обогрева трубопроводов |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2766373C1 (ru) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2638813A1 (fr) * | 1988-11-09 | 1990-05-11 | Nancy Ecole Sup Sciences Techn | Vehicule autopropulse pour meulage de tuyauterie |
| RU2969U1 (ru) * | 1995-01-19 | 1996-10-16 | Акционерное общество закрытого типа "Робоцентр" | Внутритрубное транспортное средство |
| RU2111453C1 (ru) * | 1993-09-02 | 1998-05-20 | Центральный научно-исследовательский институт "Гидроприбор" | Универсальный диагностический снаряд-дефектоскоп для контроля за состоянием трубопровода |
| RU2418234C1 (ru) * | 2009-11-06 | 2011-05-10 | Дочернее открытое акционерное общество "Оргэнергогаз" | Внутритрубное транспортное средство |
| RU2451867C2 (ru) * | 2010-06-17 | 2012-05-27 | Открытое акционерное общество "Газпром" | Аппарат внутритрубного контроля и способ перемещения его в магистральном газопроводе с заданной равномерной скоростью |
-
2021
- 2021-07-16 RU RU2021121099A patent/RU2766373C1/ru active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2638813A1 (fr) * | 1988-11-09 | 1990-05-11 | Nancy Ecole Sup Sciences Techn | Vehicule autopropulse pour meulage de tuyauterie |
| RU2111453C1 (ru) * | 1993-09-02 | 1998-05-20 | Центральный научно-исследовательский институт "Гидроприбор" | Универсальный диагностический снаряд-дефектоскоп для контроля за состоянием трубопровода |
| RU2969U1 (ru) * | 1995-01-19 | 1996-10-16 | Акционерное общество закрытого типа "Робоцентр" | Внутритрубное транспортное средство |
| RU2418234C1 (ru) * | 2009-11-06 | 2011-05-10 | Дочернее открытое акционерное общество "Оргэнергогаз" | Внутритрубное транспортное средство |
| RU2451867C2 (ru) * | 2010-06-17 | 2012-05-27 | Открытое акционерное общество "Газпром" | Аппарат внутритрубного контроля и способ перемещения его в магистральном газопроводе с заданной равномерной скоростью |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7210364B2 (en) | Autonomous robotic crawler for in-pipe inspection | |
| US7182025B2 (en) | Autonomous robotic crawler for in-pipe inspection | |
| EP1373783B1 (en) | Gas main robotic inspection system | |
| CN112828856B (zh) | 一种新型隧道多功能组合式巡检机器人 | |
| CN114517710B (zh) | 一种应用于矿井的挂轨式巡检机器人系统 | |
| CN103867848A (zh) | 一种螺旋驱动式管道机器人 | |
| CN111043448A (zh) | 一种管道机器人 | |
| KR102353477B1 (ko) | 레일 로봇 및 레일 로봇 시스템 | |
| KR102458696B1 (ko) | 레일 로봇 및 레일 로봇 시스템 | |
| CN211694003U (zh) | 一种管道机器人的检测控制系统 | |
| RU2766373C1 (ru) | Устройство для мониторинга систем электрического обогрева трубопроводов | |
| CN118493361A (zh) | 多关节仿生复合蛇形机器人 | |
| CN205632714U (zh) | 一种轮式磁吸附爬壁机器人 | |
| CN102554915A (zh) | 列车空调管道内取物机器人 | |
| JPH0370669B2 (ru) | ||
| CN114184238A (zh) | 一种基于可伸缩轮系的老旧管道巡检机器人 | |
| RU2600043C2 (ru) | Робот-шар | |
| CN117704197B (zh) | 管道机器人 | |
| CN209495071U (zh) | 一种磁性吸附行进型海底石油管道维护用软体机器人 | |
| CN110937088A (zh) | 一种适用于冰孔布放的双驱动auv磁耦合矢量推进装置 | |
| CN211694004U (zh) | 一种可拆卸的车轮更换组件及具有该组件的管道机器人 | |
| CN211875101U (zh) | 防水密封结构及具有防水密封结构的管道机器人 | |
| CN212195684U (zh) | 球形机器人 | |
| CN211764756U (zh) | 一种水陆两栖的科考机器人 | |
| CN114593306A (zh) | 管径自适应轮式模块及管道机器人 |