RU2665343C1 - Узел магнитно-резонансной катушки для фидуциальных маркеров - Google Patents
Узел магнитно-резонансной катушки для фидуциальных маркеров Download PDFInfo
- Publication number
- RU2665343C1 RU2665343C1 RU2016127522A RU2016127522A RU2665343C1 RU 2665343 C1 RU2665343 C1 RU 2665343C1 RU 2016127522 A RU2016127522 A RU 2016127522A RU 2016127522 A RU2016127522 A RU 2016127522A RU 2665343 C1 RU2665343 C1 RU 2665343C1
- Authority
- RU
- Russia
- Prior art keywords
- magnetic resonance
- medical device
- antenna
- marker
- rod
- Prior art date
Links
- 239000003550 marker Substances 0.000 claims abstract description 126
- 238000002595 magnetic resonance imaging Methods 0.000 claims abstract description 30
- 239000000126 substance Substances 0.000 claims abstract description 6
- 239000000853 adhesive Substances 0.000 claims description 3
- 230000001070 adhesive effect Effects 0.000 claims description 3
- 238000000605 extraction Methods 0.000 claims description 2
- 230000015572 biosynthetic process Effects 0.000 claims 1
- 238000003384 imaging method Methods 0.000 abstract description 4
- 239000003814 drug Substances 0.000 abstract 1
- 230000000694 effects Effects 0.000 abstract 1
- 238000000034 method Methods 0.000 description 29
- 238000010586 diagram Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 238000004590 computer program Methods 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- 230000009471 action Effects 0.000 description 7
- 239000000523 sample Substances 0.000 description 7
- 230000008901 benefit Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 5
- 238000003325 tomography Methods 0.000 description 5
- 230000000007 visual effect Effects 0.000 description 5
- 238000002679 ablation Methods 0.000 description 4
- 238000001574 biopsy Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 239000000835 fiber Substances 0.000 description 3
- 238000009432 framing Methods 0.000 description 3
- 238000003709 image segmentation Methods 0.000 description 3
- 230000002452 interceptive effect Effects 0.000 description 3
- 230000003902 lesion Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 239000007787 solid Substances 0.000 description 3
- 238000012800 visualization Methods 0.000 description 3
- 238000005452 bending Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000005865 ionizing radiation Effects 0.000 description 2
- 239000007788 liquid Substances 0.000 description 2
- 238000012856 packing Methods 0.000 description 2
- 210000004197 pelvis Anatomy 0.000 description 2
- 230000008447 perception Effects 0.000 description 2
- 210000004872 soft tissue Anatomy 0.000 description 2
- 210000001519 tissue Anatomy 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- QNRATNLHPGXHMA-XZHTYLCXSA-N (r)-(6-ethoxyquinolin-4-yl)-[(2s,4s,5r)-5-ethyl-1-azabicyclo[2.2.2]octan-2-yl]methanol;hydrochloride Chemical compound Cl.C([C@H]([C@H](C1)CC)C2)CN1[C@@H]2[C@H](O)C1=CC=NC2=CC=C(OCC)C=C21 QNRATNLHPGXHMA-XZHTYLCXSA-N 0.000 description 1
- FYYHWMGAXLPEAU-UHFFFAOYSA-N Magnesium Chemical compound [Mg] FYYHWMGAXLPEAU-UHFFFAOYSA-N 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 229910052734 helium Inorganic materials 0.000 description 1
- 239000001307 helium Substances 0.000 description 1
- SWQJXJOGLNCZEY-UHFFFAOYSA-N helium atom Chemical compound [He] SWQJXJOGLNCZEY-UHFFFAOYSA-N 0.000 description 1
- 230000036512 infertility Effects 0.000 description 1
- 238000000608 laser ablation Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 229910052749 magnesium Inorganic materials 0.000 description 1
- 239000011777 magnesium Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000011218 segmentation Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/34007—Manufacture of RF coils, e.g. using printed circuit board technology; additional hardware for providing mechanical support to the RF coil assembly or to part thereof, e.g. a support for moving the coil assembly relative to the remainder of the MR system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/285—Invasive instruments, e.g. catheters or biopsy needles, specially adapted for tracking, guiding or visualization by NMR
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/34046—Volume type coils, e.g. bird-cage coils; Quadrature bird-cage coils; Circularly polarised coils
- G01R33/34069—Saddle coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
- G01R33/34—Constructional details, e.g. resonators, specially adapted to MR
- G01R33/341—Constructional details, e.g. resonators, specially adapted to MR comprising surface coils
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3954—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI
- A61B2090/3958—Markers, e.g. radio-opaque or breast lesions markers magnetic, e.g. NMR or MRI emitting a signal
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/58—Calibration of imaging systems, e.g. using test probes, Phantoms; Calibration objects or fiducial markers such as active or passive RF coils surrounding an MR active material
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Biophysics (AREA)
- Radiology & Medical Imaging (AREA)
- High Energy & Nuclear Physics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
Изобретение относится к магнитно-резонансной томографии, а именно к фидуциальным маркерам в магнитно-резонансной томографии. Медицинский аппарат содержит узел магнитно-резонансной катушки, содержащий антенну магнитного резонанса с первым антенным и со вторым антенным участками для приема от фидуциального маркера данных о местоположении магнитного резонанса. Узел магнитно-резонансной катушки дополнительно содержит зажим с первой и со второй зажимными частями, выполненными с возможностью их перемещения между открытой и закрытой конфигурацией. Первая зажимная часть содержит первый антенный участок. Вторая зажимная часть содержит второй антенный участок. Первая и вторая зажимные части выполнены с возможностью закрепления фидуциального маркера внутри приемного сигнального объема при закрытой конфигурации. При открытой конфигурации первая и вторая зажимные части обеспечивают возможность перемещения фидуциального маркера в приемный сигнальный объем или из него. Технический результат – повышение качества изображения, получаемого при осуществлении МР томографии. 11 з.п. ф-лы, 14 ил.
Description
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к магнитно-резонансной томографии, в частности, к фидуциальным маркерам в магнитно-резонансной томографии.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Доступность для использования интерактивной, работающей в реальном времени магнитно-резонансной томографии (МРТ), а также МР-совместимого инструментария привело к увеличению использования МР-наведения, в частности, при транскутанных процедурах, выполняемых посредством игл или линейных абляционных зондов. Помимо отсутствия ионизирующего излучения МР-наведение предлагает ряд преимуществ для таких процедур, причем, наиболее важным преимуществом является контраст мягких тканей и широкие томографические возможности МР по сравнению с КТ или УЗИ. При проведении современных чрескожных процедур с МР-наведением, для того чтобы наметить путь устройства, используют дооперационные трехмерные МР-изображения, после чего в качестве направляющих используют стереотаксические устройства, чтобы выставить устройство относительно целевого объекта и управлять его введением, что в большинстве случаев осуществляется снаружи МР-канала. И, наконец, МР используется для подтверждения того, что устройство достигло целевого объекта.
Поскольку стереотаксические процедуры склонны к регистрации погрешностей, обусловленных движениями пациента и изгибом иглы, а также поскольку они включают в себя сложную последовательность выполняемых действий (движение пациента в канал и из него), наиболее современные центры в настоящее время практикуют так называемые ручные процедуры, при которых устройство продвигается без использования какого-либо физического стереотаксического направляющего устройства при наведении по изображению в режиме реального времени в пределах МР. Этому способствуют специальные МР-последовательности, которые визуализируют целевое поражение, и устройства с высокой четкостью, а также наличие открытых МР-систем.
В Coutts et. at. “Integrated and Interactive Position Tracking and Imaging of Interventional Tools and Internal Devices Using Small Fiducial Receiver Coils раскрыт способ отслеживания положения твердого устройства внутри магнитно-резонансного сканера. Отслеживание положения осуществляется с помощью двух или трех небольших магнитно-резонансных приемных катушек, присоединенных к отдельным каналам приемника.
Патент US 5307806 рассматривает тазовую катушку ЯМР с двумя шарнирно соединенными задним и передним сегментами. В открытом положении таз пациента перемещают в пространство между этими сегментами. В закрытом положении сегменты плотно пригнаны вокруг таза пациента.
Публикация международной патентной заявки WO2012/137148 A1 раскрывает магнитно-резонансный фидуциальный маркер, который содержит магнитно-резонансную приемную катушку, окружающую тороидальный магнитно-резонансный сигнальный объем.
Публикация международной патентной заявки WO 2007/046011 A1 раскрывает систему для отслеживания узла фидуциального маркера в магнитно-резонансном сканере.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к медицинскому аппарату и определено в независимом пункте формулы изобретения. Варианты осуществления определены в зависимых пунктах формулы изобретения.
Как будет понятно специалисту в области, аспекты настоящего изобретения могут быть выполнены в виде аппарата, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая микропрограммное обеспечение, встроенное программное обеспечение, микрокод и т.д.) или варианта осуществления, комбинирующего программные и аппаратные аспекты, все из которых в настоящем документе в целом могут называться «контуром», «модулем» или «системой». Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, реализованного на одном или более машиночитаемом носителе (носителях), имеющем в себе исполняемый машиной код.
Может быть использована любая комбинация одного или более машиночитаемых носителей. Машиночитаемых носитель может быть машиночитаемым носителем сигнала или машиночитаемым носителем данных. В том смысле, как используется в настоящем документе, термин «машиночитаемый носитель данных» включает в себя любой материальный носитель данных, который может хранить инструкции, которые исполняются процессором вычислительного устройства. Машиночитаемый носитель данных может называться машиночитаемым невременным носителем данных. Кроме того, машиночитаемый носитель данных может также называться материальным машиночитаемым носителем. В некоторых вариантах осуществления машиночитаемый носитель данных может также быть способен хранить данные, доступ к которым может быть получен процессором вычислительного устройства. Примеры машиночитаемых носителей данных включают в себя, но не ограничиваются этим, флоппи-диск, магнитный жесткий диск, твердый жесткий диск, флэш-память, USB флэш-накопитель, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), оптический диск, магнитооптический диск и регистровый файл процессора. Примеры оптических дисков включают в себя компакт-диски (CD) и цифровые универсальные диски (DVD), например, CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин «машиночитаемый носитель данных» относится также к различным типам записывающих носителей, доступ к которым может осуществляться посредством вычислительного устройства через сеть или линию связи. Например, данные могут быть получены через модем, через интернет или через локальную сеть. Исполняемый машиной код, встроенный в машиночитаемый носитель, может быть передан с использованием любого подходящего носителя, включая, но не ограничиваясь этим, беспроводную, проводную линию, волоконно-оптический кабель, радиочастотную линию и т.д., или любую подходящую комбинацию вышеперечисленного.
Машиночитаемый носитель сигнала может включать в себя передаваемый сигнал данных со встроенным в него исполняемым машиной кодом, например, в основной полосе частот или в виде части несущей волны. Такой передаваемый сигнал может принимать любую из множества форм, включая, но, не ограничиваясь этим, электромагнитную, оптическую, или любую соответствующую их комбинацию. Машиночитаемый носитель сигнала может быть любым машиночитаемым носителем, который не является машиночитаемым носителем данных и который может взаимодействовать, передавать или переносить программу для использования посредством или в соединении с исполняющей инструкции системой, аппаратом или устройством.
«Компьютерная память» или «память» представляет собой пример машиночитаемого носителя данных. Компьютерной памятью является любая память, доступ к которой непосредственно осуществляется процессором. «Компьютерное запоминающее устройство» или «запоминающее устройство» является еще одним примером машиночитаемого носителя данных. Компьютерным запоминающим устройством является любой невременный машиночитаемый носитель данных. В некоторых вариантах осуществления компьютерное запоминающее устройство может быть также компьютерной памятью или наоборот.
«Процессор», в том смысле, как он используется в настоящем документе, подразумевает электронный компонент, который способен исполнять программу или исполняемую машиной инструкцию или исполняемый машиной код. Упоминания вычислительного устройства, содержащего «процессор» следует интерпретировать как, упоминание устройства, возможно, содержащего более одного процессора или ядра процессора. Процессор может быть, например, многоядерным процессором. «Процессор» может также относиться к группе процессоров в пределах одной компьютерной системы или распределенных среди нескольких компьютерных системам. Термин «вычислительное устройство» также должен истолковываться, как, возможно, относящийся к группе или к сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Исполняемый машиной код может исполняться несколькими процессорами, которые могут находиться внутри одного и того же вычислительного устройства или которые даже могут быть распределены по нескольким вычислительным устройствам.
Исполняемый машиной код может содержать исполняемые машиной инструкций или программу, которая заставляет процессор выполнять аспект по настоящему изобретению. Исполняемый машиной код для выполнения операций для аспектов настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированные языки программирования, такие как Java, Smalltalk, C++ и т.п., а также традиционные языки процедурного программирования, такие как язык программирования «C» или аналогичные языки программирования, и скомпилирован в исполняемые машиной инструкции. В некоторых случаях исполняемый машиной код может присутствовать в форме языка высокого уровня или в заранее скомпилированной форме и может быть использован в сочетании с интерпретатором, который генерирует исполняемые машиной инструкции во время выполнения.
Исполняемый машиной код может исполняться полностью на компьютере пользователя, частично на компьютере пользователя, как отдельный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или же полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или же может быть выполнено подсоединение к внешнему компьютеру (например, через интернет, используя провайдера услуг интернета).
Аспекты по настоящему изобретению описаны со ссылкой на иллюстрации блок-схем и (или) структурных диаграмм способов, аппаратов (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Следует понимать, что каждый блок или часть блоков блок-схемы, иллюстраций и (или) структурных диаграмм могут быть реализованы с помощью компьютерных программных инструкций в виде исполняемого машиной кода, когда это применимо. Также следует понимать, что, когда они не являются взаимоисключающими, комбинации блоков на различных блок-схемах, иллюстрациях, и (или) структурных диаграммах могут быть объединены. Эти инструкции компьютерной программы могут быть предусмотрены для процессора вычислительной машины общего назначения, специализированной вычислительной машины или другого программируемого устройства обработки данных для получения такой машины, чтобы инструкции, которые исполняются посредством процессора вычислительной машины или другого программируемого устройства обработки данных, создавали средство для выполнения функций или действий, указанных в блок-схеме и (или) в структурной диаграмме блока или блоков.
Эти инструкции компьютерной программы могут также храниться на машиночитаемом носителе, который может управлять компьютером, другим программируемым устройством обработки данных или другими устройствами для функционирования определенным образом, чтобы инструкции, сохраненные на машиночитаемом носителе, создавали готовое изделие, включающее в себя инструкции, которые реализуют функцию или действие, указанное в блок-схеме и (или) в структурной диаграмме блока или блоков.
Кроме того, инструкции компьютерной программы могут быть загружены в компьютер, другое программируемое устройство обработки данных или в другие устройства, чтобы вызвать ряд функциональных этапов, подлежащих выполнению на компьютере, другом программируемом устройстве или на других устройствах для достижения реализуемого компьютером процесса, так чтобы инструкции, которые исполняются на компьютере или другом программируемом устройстве, обеспечивали процессы для выполнения функций/действий, указанных в блок-схеме и (или) в структурной диаграмме блока или блоков.
«Пользовательский интерфейс», в том виде, как он используется в настоящем документе, представляет собой интерфейс, который позволяет пользователю или оператору взаимодействовать с компьютером или с компьютерной системой. Пользовательский интерфейс может также называться как «человеко-машинный интерфейс». Пользовательский интерфейс может обеспечивать информацию или данные для оператора и (или) получать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать, чтобы компьютер получал входной сигнал от оператора, и может обеспечивать пользователю выходной сигнал с компьютера. Другими словами, пользовательский интерфейс может позволить оператору управлять или манипулировать компьютером, и этот интерфейс может позволять компьютеру указывать на результат управления или манипулирования компьютером со стороны оператора. Отображение данных или информации на дисплее или графическом пользовательском интерфейсе является примером обеспечения информации для оператора. Прием данных посредством клавиатуры, мыши, шарового манипулятора, сенсорной панели, ручки координатно-указательного устройства, графического планшета, джойстика, игрового планшета, веб-камеры, наушников, передаточного рычага, колеса управления, педалей, проводной перчатки, танцевального коврика, дистанционного управления и акселерометра является примерами компонентов пользовательского интерфейса, которые обеспечивают получение информации или данных от оператора.
«Аппаратный интерфейс», в том смысле, как используется в настоящем документе, относится к интерфейсу, который позволяет процессору компьютерной системы взаимодействовать с или управлять внешним вычислительным устройством и (или) аппаратом. Аппаратный интерфейс может обеспечить, чтобы процессор посылал управляющие сигналы или инструкции на внешнее вычислительное устройство и (или) аппарат. Кроме того, аппаратный интерфейс может также дать возможность процессору обмениваться данными с внешним вычислительным устройством и (или) аппаратом. Примеры аппаратного интерфейса включают, но ими не ограничиваются этим, универсальную последовательную шину, порт 1394 IEEE, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE 488, соединитель Bluetooth, соединитель беспроводной локальной сети, соединитель протокола TCP/IP, соединение по сети Ethernet, интерфейс управляющего напряжения, интерфейс MIDI, интерфейс с аналоговым вводом и интерфейс с цифровым вводом.
Термин «дисплей» или «устройство отображения», в том смысле, как используется в настоящем документе, включает в себя устройство вывода или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, звуковые и (или) тактильные данные. Примеры дисплея включают в себя, но не ограничиваются этим, монитор компьютера, экран телевизора, сенсорный экран, тактильной электронный дисплей, экран Брайля, электронно-лучевую трубку (ЭЛТ), запоминающую трубку, дисплей с двумя устойчивыми состояниями, электронную бумагу, векторный дисплей, плоский дисплей, вакуумный люминесцентный дисплей (VF), дисплеи на основе светоизлучающих диодов (СИД), электролюминесцентный дисплей (ЭЛД), плазменные дисплейные панели (PDP), жидкокристаллический дисплей (LCD), дисплеи на органических светоизлучающих диодах (ОСИД), проектор и головной дисплей.
Магнитно-резонансные (МР) данные определяются в настоящем документе, как запись измерений радиочастотных сигналов, испускаемых атомными спинами посредством антенны магнитно-резонансного аппарата при сканирования во время скана магнитно-резонансной томографии. Магнитно-резонансные данные являются примером данных медицинского изображения. Изображение магнитно-резонансной томографии (MRI) определяется в настоящем документе как реконструированная двух- или трехмерная визуализация анатомических данных, содержащихся в данных магнитно-резонансной томографии. Эта визуализация может быть выполнена с использованием компьютера.
Магнитно-резонансные данные о местоположении, в том виде, как используется в настоящем документе, включают в себя магнитно-резонансные данные, полученные с целью определения местоположения фидуциального маркера.
В одном объекте изобретение обеспечивает медицинский аппарат, содержащий узел магнитно-резонансной катушки. Узел магнитно-резонансной катушки содержит антенну магнитного резонанса, содержащую первый антенный участок и второй антенный участок для приема данных о местоположении магнитного резонанса от фидуциального маркера. В некоторых примерах первый и второй антенные участки могут быть элементами антенны. В других примерах первый и второй антенные участки могут быть частями антенны, которые собраны или соединены, образуя один элемент антенны. Фидуциальный маркер, в том виде, как используется в настоящем документе, окружает объект, который может быть помещен в область сканирования системы магнитно-резонансной томографии, и который появляется на магнитно-резонансном изображении, которое получено или реконструировано по магнитно-резонансным данным. Фидуциальный маркер предназначен для использования в качестве опорной точки или в качестве точки измерения.
Узел магнитно-резонансной катушки содержит зажим. Зажим содержит первую зажимную часть и вторую зажимную часть. Первая зажимная часть и вторая зажимная часть выполнены с возможностью перемещения между открытой конфигурацией и закрытой конфигурацией. Первая зажимная часть содержит первый антенный участок. Вторая зажимная часть содержит второй антенный участок. При закрытой конфигурации первая зажимная часть и вторая зажимная часть выполнены с возможностью закрепления фидуциального маркера внутри приемного сигнального объема между первым антенным участком и вторым антенным участком. При открытом положении первая зажимная часть и вторая зажимная часть выполнены с предоставлением возможности фидуциальному маркеру перемещаться в объем для приема сигнала или из него. Этот вариант осуществления может быть полезным, поскольку он обеспечивает узел магнитно-резонансной катушки, который может быть зажат на фидуциальном маркере. Это удерживает антенну магнитного резонанса отдельно от фидуциального маркера. Катушка, как используется в настоящем документе, может рассматриваться как антенна. В технологии магнитно-резонансной томографии термин «катушка» обычно используется вместо термина «антенна».
Фидуциальный маркер может содержать испускающее сигнал вещество, когда осуществляется магнитно-резонансная томография. Фидуциальный маркер может, например, иметь трубку или другую емкость, заполненную жидкостью или материалом, который становится виден на магнитно-резонансном изображении. Антенна магнитного резонанса функционирует как локальная антенна, которая помещена вокруг фидуциального маркера. Фидуциальный маркер может также называться магнитно-резонансным фидуциальным маркером. Фидуциальный маркер может содержать сигнальный объем. Этот сигнальный объем может содержать испускающее МР-сигнал вещество. В некоторых примерах сигнальный объем может быть тороидальным. В других примерах сигнальный объем может быть частично тороидальным с отверстием или с открытой областью в части тороида.
В другом варианте осуществления узел магнитно-резонансной катушки дополнительно содержит передатчик, выполненный с возможностью приема сигнала магнитного резонанса от антенны магнитного резонанса и передачи его в систему магнитно-резонансной томографии. В различных примерах термин «передатчик» может интерпретироваться по-разному. В некоторых случаях это может относиться к оптическому передающему устройству, а для передачи данных в систему магнитно-резонансной томографии может быть использована волоконная оптика.
В других примерах передатчик может функционировать беcпроводным способом. Например, могут быть использованы Wi-Fi, Bluetooth или другие стандарты радиопередачи. В случае с беспроводным передатчиком это может быть особенно полезным, поскольку может уменьшить количество проводов, необходимых для использования антенны магнитного резонанса. Если, например, врач использует медицинский аппарат, чтобы с помощью фидуциальных маркеров и одной или более антенн магнитного резонанса направлять катетер, то использование нескольких проводов может облегчить применение катетера.
В другом варианте осуществления первый антенный участок представляет собой первую седлообразную катушку, а второй антенный участок представляет собой вторую седлообразную катушку.
В этом варианте осуществления две седлообразные катушки могут опоясывать фидуциальный маркер и обеспечивать хороший прием сигнала магнитного резонанса от этого фидуциального маркера.
В другом варианте осуществления первая зажимная часть содержит первый электрический контакт, соединенный с первым антенным участком. Вторая зажимная часть содержит второй электрический контакт, соединенный со вторым антенным участком. Зажим выполнен с возможностью подсоединения первого электрического контакта ко второму электрическому контакту с образованием электрического соединения. Первый антенный участок и второй антенный участок выполнены с возможностью образования одной поверхностной катушки. Этот вариант осуществления может быть полезным, поскольку он делает возможным удобное размещение поверхностной катушки вокруг фидуциального маркера.
В другом варианте осуществления узел магнитно-резонансной катушки дополнительно содержит воспринимающую фидуциальный маркер систему для восприятия фидуциального маркера.
В другом варианте осуществления воспринимающая фидуциальный маркер система содержит любое из нижеследующего: переключатель для восприятия того, закрыт ли зажим в закрытой конфигурации, систему измерения импеданса для измерения импеданса антенны магнитного резонанса, чтобы определять, находится ли фидуциальный маркер внутри приемного сигнального объема, и (или) чтобы определять тип фидуциального маркера, и их комбинации. Этот вариант осуществления может быть полезным, поскольку он может обеспечить, чтобы фидуциальный маркер был правильно вставлен в узел магнитно-резонансной катушки.
В другом варианте осуществления медицинский аппарат дополнительно содержит индикатор, выполненный с возможностью отображения визуального сигнала, если воспринимающая фидуциальный маркер система воспринимает фидуциальный маркер. Это может быть полезным, так как оператор или врач, использующий узел магнитно-резонансной катушки, может легко узнавать, что фидуциальный маркер правильно вставлен в узел магнитно-резонансной катушки.
В другом варианте осуществления медицинский аппарат дополнительно содержит фидуциальный маркер.
В другом варианте осуществления фидуциальный маркер содержит стержень медицинского устройства или выполнен с возможностью приема этого стержня. Этот вариант осуществления может быть полезным, так как с помощью медицинского аппарата может быть определено местоположение стержня или вводимого устройства, или катетера.
В другом варианте осуществления зажим выполнен с возможностью закрепления стержня к узлу магнитно-резонансной катушки при закрытой конфигурации. Например, когда узел магнитно-резонансной катушки закрыт, он может зажимать или захватывать стержень.
В другом варианте осуществления фидуциальный маркер содержит отверстие для стержня. Фидуциальный маркер является тороидальным. Фидуциальный маркер содержит трубку, заполненную способным определять магнитный резонанс веществом, окружающим стержень. Эта трубка имеет зазор. Стержень выполнен с возможностью его извлечения через этот зазор под прямым углом к отверстию. Этот вариант осуществления может быть полезным, поскольку, например, после введения катетера фидуциальный маркер может быть при необходимости удален.
В другом варианте осуществления фидуциальный маркер содержит клеящее вещество для крепления к объекту. Объект, например, может быть субъектом. Размещение фидуциального маркера на объекте или субъекте может быть полезным, поскольку он может быть использован для определения точки входа в объект или в субъекта.
В другом варианте осуществления медицинский инструмент содержит интервенционное устройство.
В другом варианте осуществления интервенционное устройство содержит фидуциальный маркер. Этот фидуциальный маркер может быть прикреплен или постоянно прикреплен к интервенционному устройству.
В некоторых вариантах осуществления фидуциальный маркер может содержать сигнальный объем тороидальной формы. Это может позволить измерение положения и (или) ориентации оси иглы только с одним или с двумя маркерами, но без блокировки оси иглы, как это было бы в случае точечных маркеров. Следовательно, варианты осуществления настоящего изобретения могут быть совместимы с любым устройством игольчатого типа, и, кроме того, при этом в полую иглу могут быть введены вторичные устройства, например, стилет или биопсийное устройство.
В другом варианте осуществления интервенционное устройство является иглой.
В другом варианте осуществления интервенционной устройство представляет собой линейный абляционный зонд.
В другом варианте осуществления интервенционной устройство представляет собой криозонд. Криозонд поставляет криогенную жидкость или охлаждает окрестности наконечника зонда до криогенных температур для охлаждения тканей до точки абляции.
В другом варианте осуществления интервенционной устройство представляет собой лазерный абляционный зонд.
В другом варианте осуществления интервенционной устройство представляет собой биопсийную иглу.
В другом варианте осуществления интервенционной устройство представляет собой полую иглу.
В другом варианте осуществления интервенционной устройство представляет собой микроволновой зонд. Микроволновый зонд выполнен с возможностью подачи микроволновой энергии к тканям вблизи кончика стержня.
В другом варианте осуществления интервенционной устройство представляет собой систему доставки однопроводного волновода. Однопроводный волновод может быть, например, доставлен с использованием полой иглы или другой структуры. Затем однопроводный волновода может быть использован для доставки к целевой зоне другого интервенционного устройства.
В другом варианте осуществления медицинский аппарат дополнительно содержит систему магнитно-резонансной томографии для получения магнитно-резонансных данных от субъекта. Медицинский аппарат дополнительно содержит медицинское устройство, содержащее стержень. Стержень выполнен с возможностью его введения в субъекта. Фидуциальный маркер выполнен с возможностью его крепления к стержню. Медицинский аппарат дополнительно содержит процессор для управления медицинским аппаратом. Медицинский аппарат дополнительно содержит память для хранения исполняемых машиной инструкций для осуществления их процессором. Исполнение этих инструкций заставляет процессор получать магнитно-резонансные данные. Исполнение этих инструкций дополнительно заставляет процессор реконструировать упомянутые магнитно-резонансные данные в магнитно-резонансное изображение. Исполнение этих инструкций дополнительно заставляет процессор принимать выбор целевого объема в пределах упомянутого магнитно-резонансного изображения.
Исполнение инструкций дополнительно заставляет процессор повторно получать данные о местоположении магнитного резонанса от антенны магнитного резонанса. Эти данные о местоположении магнитного резонанса являются описательными относительно местоположения фидуциального маркера первого магнитного резонанса. Исполнение инструкций дополнительно заставляет процессор представлять на устройстве отображения проекцию магнитно-резонансных данных, указывающих положение стержня относительно целевой зоны. Эта проекция определяется с использованием по меньшей мере упомянутых данных о местоположении и упомянутого местоположения целевого объема.
Этот вариант осуществления может быть полезным, поскольку он предоставляет медицинскому аппарату возможностью регулировать проекцию данных изображения для системы магнитно-резонансной томографии так, что стержень удобно отображается.
В других вариантах осуществления или в примерах медицинский аппарат может содержать несколько антенн магнитного резонанса, каждая из которых поставляет данные системе магнитно-резонансной томографии. Кроме того, магниторезонансный аппарат и зажим могут иметь или содержать несколько фидуциальных маркеров для их ввода в несколько магнитных резонансных антенн.
Следует понимать, что один или более из вышеупомянутых вариантов осуществления изобретения могут быть скомбинированы, если скомбинированные варианты не являются взаимоисключающими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее будут описаны предпочтительные варианты осуществления изобретения только в качестве примеров и со ссылками на чертежи, на которых
фиг. 1 иллюстрирует пример узла магнитно-резонансной катушки;
фиг. 2 иллюстрирует пример фидуциального маркера;
фиг. 3 иллюстрирует дополнительный пример фидуциального маркера;
фиг. 4 иллюстрирует дополнительный пример фидуциального маркера;
фиг. 5 иллюстрирует дополнительный пример фидуциального маркера;
фиг. 6 иллюстрирует дополнительный пример узла магнитно-резонансной катушки;
фиг. 7 иллюстрирует дополнительный пример узла магнитно-резонансной катушки;
фиг. 8 иллюстрирует дополнительный пример узла магнитно-резонансной катушки;
фиг. 9 иллюстрирует пример контура магнитно-резонансной антенны;
фиг. 10 иллюстрирует дополнительный пример контура магнитно-резонансной катушки;
фиг. 11 иллюстрирует дополнительный пример контура магнитно-резонансной катушки;
фиг. 12 иллюстрирует пример медицинского аппарата;
фиг. 13 показывает блок-схему, иллюстрирующую способ работы медицинского аппарата по фиг. 12; и
фиг. 14 показывает блок-схему, иллюстрирующую альтернативный способ работы медицинского аппарата по фиг. 12.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Одинаково пронумерованные элементы на этих чертежах являются либо эквивалентны элементами, либо они выполняют одинаковую функцию. Элементы, которые были описаны ранее, не обязательно будут описываться на последующих чертежах, если их назначение одинаково.
Описывается пример устройства слежения, которое может содержать фидуциальный маркер, а также способ проведения интервенций с МР-наведением. Оно может содержать небольшое зажимное устройство (называемое здесь также зажимом), оснащенное двумя активными маркерными катушками седлообразной формы, используемыми в комбинации с пассивным маркером или фидуциальным маркером, который, возможно, имеет тороидальную форму. Фидуциальный маркер обеспечивает сигнальный объем магнитного резонанса (МР). В некоторых примерах по оси интервенционного инструмента (например, биопсийной иглы) размещены два из этих устройств слежения.
Тороидальная форма пассивных маркеров позволяет измерение положения и ориентации любого инструмента игольчатого типа без ущерба его функционированию и без влияния на его возможности по осевой или обратной нагрузке. Следовательно, в полую иглу могут быть введены вторичные устройства, например, стилет или биопсийное устройство.
Зажимной механизм устройства слежения может позволить:
- его легкое размещение в любой точке во время процедуры и удаление;
- выставление и фиксацию к оси интервенционного устройства;
- фиксацию пассивного маркера.
Небольшой размер и малый вес устройства слежения делает возможной высокую маневренность и мгновенную тактильную обратную связь, что требуется при продвижении игольчатого устройства в пациента.
Раскрыты низкие по стоимости одноразовые пассивные маркеры и обеспечивающие стерильность вспомогательные элементы. В ходе разработки находится реализация аналогичной системы-прототипа.
Существование интерактивной МРТ, работающей в реальном времени, а также МР-совместимого инструментария, привело к увеличению использования МР-наведения, в частности, в транскутанных процедурах, выполняемых посредством игл или линейных абляционных зондов. Помимо отсутствия ионизирующего излучения МР-наведение предлагает ряд преимуществ для таких процедур, наиболее важным из которых является контраст мягких тканей и широкие возможности МР по сравнению с КТ или УЗИ. При проведении современных клинических чрескожных процедур с МР-наведением, для того чтобы наметить путь устройства, используют дооперационные трехмерные МР-изображения, после чего используют стереотаксические устройства, чтобы выставить устройство относительно целевого объекта и направлять его ввод, что в большинстве случаев осуществляется снаружи МР-канала. И, наконец, техника магнитного резонанса используется для подтверждения того, что устройство достигло целевого объекта.
Поскольку стереотаксические процедуры склонны регистрировать погрешности, обусловленные движением или смещением пациента и изгибом иглы, а также поскольку они включают в себя сложную последовательность выполняемых действий (движение пациента в направлении канала и от него), наиболее современные центры в настоящее время практикуют процедуры, при которых устройство продвигается с наведением по изображению в режиме реального времени в пределах МР. Это облегчается посредством специальных МР-последовательностей, которые визуализируют целевое поражение, устройств с высокой четкостью, а также наличием ширококанальных МР-систем с открытым магнитом.
Однако этот подход требует выставления срезов изображений относительно иглы и (или) целевого поражения. Текущей практикой является ручная регулировка положения срезов, но при этом требуется, чтобы оператор инвазивной процедуры передавал данные о регулировках запрошенного среза оператору МР-установки, находящемуся снаружи кабинета МР-обследования, что является непростым делом и требует наличия опытной и хорошо сработавшейся команды. Для того чтобы стимулировать широкое использование, обязательными являются средства поддержки, автоматизации и усовершенствования последовательности выполняемых действий таких ручных процедур.
Для автоматической адаптации плоскостей сканирования может быть использована технология активных маркеров, предназначенная для отслеживания устройств и автоматического определения соответствующей плоскости сканирования. В последнее время были продемонстрированы ручные инструменты наведения с активным слежением за иглой вместе с соответствующими модификациями программного обеспечения для МР-системы, которые позволяют осуществлять простое в использовании, быстрое и точное управление плоскостью сканирования. Инструмент наведения иглы подключен непосредственно к МР-системе и может быть использован для управления МР-томографией в режиме реального времени для обеспечения оптимального наведения и направления перемещением.
Существующие комбинации фидуциальных маркеров и антенн могут иметь нижеуказанный недостаток. Во время интервенционной процедуры не требуется постоянное слежение за интервенционным устройством. И хотя устройства слежения намного меньше, чем предыдущие конструкции, они по-прежнему могут мешать манипуляциям с этими устройствами или создают риски продвижению, поскольку они не могут быть удалены. Введение пробок, чтобы отключить их во время перерывов в продвижении, представляет собой трудный компромисс между надежным механическим или электрическим соединением и возможностью его легкого отсоединения и увеличивает стоимость (одноразового) устройства.
Небольшое легковесное зажимное устройство или узел магнитно-резонансной катушки в том виде, как описано в настоящем документе, может быть оснащен двумя седлообразными катушками (или катушками других типов), которые могут быть зажаты на пассивном маркере тороидальной формы. Этот маркер и зажимное устройство расположены на интервенционном устройстве (например, на игле) и, таким образом, позволяют локализовать или определить местоположение соответствующей точки на оси иглы с одним каналом маркера и независимо от ориентации направляющей относительно B0. Два из таких устройств слежения с известным пространственным положением могут позволить отложить положение и ориентацию, например, оси иглы. Зажимной механизм при необходимости может обеспечить легкое удаление и новое крепление устройства слежения.
При известном положении и установке под углом интервенционного устройства визуализация этого устройства и соответствующие плоскости изображения позволяют упростить вышеописанный процесс.
Пример устройства слежения или узла магнитно-резонансной катушки может состоять из легковесного зажимного устройства, содержащего активные седлообразные катушки в двух зажимных половинках и пассивный маркер, обеспечивающий уровень сигнала (например, имеющийся в продаже кожный клеевой маркер), как схематично показано на фиг. 1.
Фиг. 1 показывает пример медицинского аппарата 100. Медицинский аппарат показан включающим в себя узел 102 магнитно-резонансной катушки. Узел магнитно-резонансной катушки имеет первую зажимную часть 104 и вторую зажимную часть 106. Первая зажимная часть 104 и вторая зажимная часть 106 имеют форму языка. Первая зажимная часть 104 имеет первый антенный участок 108, а вторая зажимная часть 106 имеет второй антенный участок 110. Оба, т.е. и первый антенный участок 108, и второй антенный участок 110 могут рассматриваться как седлообразные катушки. Область между седлообразными катушками 108, 110 формирует приемный сигнальный объем. Седлообразные катушки 108, 110 подсоединены к антенному соединению 112. Это антенное соединение 112 может быть соединено, например, с радиочастотным приемником системы магнитно-резонансной томографии. Показан также упругий элемент 114, который стягивает первую зажимную часть 104 со второй зажимной частью 106. Ось 116 позволяет двум зажимным частям 104, 106 поворачиваться вокруг этой оси поворота и посредством упругой части 114 стягиваться друг с другом.
Каждая из зажимных частей 104, 106 соединена с ручкой 117. Сжатием ручек 117 катушки узел 102 магнитно-резонансной катушки приводится в открытое положение, и между двумя языкообразными зажимными частями 104, 106 может быть вставлен фидуциальный маркер 118. В этом примере имеется открытое пространство, в котором может поместиться этот фидуциальный маркер 118. Однако в других конструкциях могут быть выполнены пазы или канавки, которые приспособлены для размещения фидуциального маркера 118.
Пассивный маркер может иметь центральное отверстие, чтобы через него мог пройти инструмент (например, игла). В этом случае пассивный маркер расположен на игле, а зажимное устройство (которое подключено к МР-системе) закрепляют на ней только тогда, когда необходимо активное слежение (смотри фиг. 4). Зажимное устройство фиксирует и выравнивает себя и пассивный маркер посредством силы зажима. Пассивный маркер имеет известную геометрию и может быть плотно окружен внутренней оболочкой зажима. Выполненные вдоль центральной оси зажима выравнивающие и фиксирующие пазы (например, в форме ромба, чтобы адаптироваться к разным диаметрам, а также для увеличения трения с зажатым устройством) центрируют и фиксируют устройство слежения на игле.
Если по меньшей мере одна боковая стенка оболочки зажима является достаточно тонкой, а выравнивающий паз достаточно большим, то зажим может быть установлен также на пассивном маркере, будучи прикрепленным к коже пациента, чтобы определить точку входа, в то же время обуславливая легкий ввод иглы.
В дополнение к основной функции слежения для управления аспектами интервенционной установки, например, началом или остановкой захвата изображения, определением различных типов зажимного устройства, а также для изменения их калибровки или визуализации может быть использовано восприятие отверстия зажима (например, посредством механического переключателя или по изменению величины МР, или по обнаружению сигнала импеданса). Способность незамедлительного восприятия представляет собой один из вариантов выполнения МР-измерений для обнаружения отношения сигнал/шум режима слежения. Открытый или снятый зажим не будет давать никакого сигнала и поэтому может быть обнаружен.
Для секции с выравнивающим по центру и фиксирующим пазом могли бы быть приспособлены различные механические вставки, так чтобы они специально подходили для определенных устройств (например, для игл различных диаметров) или точек крепления, включая маркеры. Эти вставки могут быть прикреплены к зажимному устройству (и являются полностью открытыми, когда открыт зажим) или же к интервенционному устройству, за которым необходимо следить. Это «устройство механической идентификации» может быть использовано для того, чтобы сохранять пространственный ориентир для других многочисленных устройств, которые описываются своей соответствующей геометрической моделью и, следовательно, измененной координатной системой.
В другом примере неротационно-симметричная точка крепления (и вставка зажима) в сочетании с неротационно-симметричным объемом маркера позволила бы отслеживать устройства только с одним маркером и/или его вращение вокруг продольной оси устройства.
Вышеприведенные примеры были основаны на пассивном маркере с тороидальной формой. В качестве альтернативы этот тороид может иметь зазор с одной стороны, так чтобы его можно было закреплять на игле и удалять с нее, в то время как игла может оставаться на месте.
В конечном счете, использование пассивного маркера в качестве отдельной части может быть полностью исключено. Вместо того, сигнальные объемы могут быть интегрированы в седлообразные катушки зажимного устройства. Это позволяет производить быстрое удаление всего устройства слежения за счет потери возможности в любое время находить положение иглы пассивным образом.
Пассивные маркеры могут изготавливаться и обертываться в виде одноразовых стерильных устройств. Использование зажимного устройства в стерильном окружении стало возможным в результате обеспечения специальных одноразовых стерильных пластиковых набивок, которые могут быть обернуты вокруг зажимного устройства, прежде чем его зажимают на игле. Форма набивок адаптирована с возможностью плотного прилегания к форме зажимного устройства.
Устройство слежения в реальном масштабе времени мало, легковесно, и может быть оснащено минимальным количеством проводов.
При необходимости, определенной последовательностью выполняемых действий/этапом интервенции, оно может быть выставлено и зафиксировано на предназначенных для слежения устройствах, а также легко снято с них.
Пассивные маркеры и стерильные набивки реализованы в виде одноразовых устройств, что позволяет, основываясь на них, получать экономическую выгоду
Изобретение может быть применено ко всем интервенциям с МР-наведением, выполняемым посредством устройств линейной формы (или же - в других вариантах осуществления - произвольной формы).
Фиг. 2 показывает вид 200 в перспективе и вид 202 в поперечном сечении фидуциального маркера 118. На виде 202 в поперечном сечении можно видеть, что в нем есть трубка из испускающего МР-сигнал вещества 204, которое заключено в обрамляющий его материал 206. Обрамляющим материалом 206 может быть, например, пластик. Испускающим МР-сигнал веществом 204 может быть, например, вода или жир или другой материал, который может быть подобран в соответствии с конкретным используемым протоколом магнитного резонанса.
Фиг. 3 показывает дополнительный пример фидуциального маркера 300. Этот фидуциальный маркер 300 показан на виде 302 в перспективе и на виде 304 в поперечном сечении. Фидуциальный маркер 300 аналогичен маркеру, показанному на фиг. 2, за исключением того, что здесь имеется сквозное отверстие 306, которое выполнено с возможностью приема объекта сферической или стержнеобразной формы. Фидуциальный маркер 300 может быть помещен на стержень медицинского инструмента или устройства. Это может быть полезно для определения положения медицинского прибора или инструмента при его использовании в какой-либо процедуре во время проведения магнитно-резонансной томографии.
Фиг. 4 показывает следующий пример фидуциального маркера 400. Этот фидуциальный маркер 400 аналогичен маркеру, показанному на фиг. 3, но здесь имеется дополнительная удаляемая пробка 406. В испускающем МР-сигнал веществе 204 есть зазор 408. Вместо того чтобы быть сплошным, а в нем есть удаляемая пробка 408, которая может быть выдвинута, чтобы позволять удаление стержня из отверстия 306 в направлении, перпендикулярном оси стержня. Этот вариант осуществления может быть полезным, если медицинский инструмент, после того, как он был установлен или использован, желательно удалить. Например, после того, как катетер был введен, может быть неудобным снова извлекать катетер, чтобы снять фидуциальный маркер 400. Это позволяет легко удалить фидуциальный маркер 400 без перемещения стержня.
Фиг. 5 показывает следующий пример фидуциального маркера 500. Этот фидуциальный маркер 500 аналогичен маркеру, показанному на фиг. 3. Но внутри отверстия постоянно установлен стержень 506. Например, медицинские инструменты могут приходить с заранее прикрепленным и расположенным в них фидуциальным маркером 500.
На фиг. 6 показан еще один пример медицинского аппарата. Этот медицинский аппарат 600 показан включающим в себя узел 102’ магнитно-резонансной катушки. Узел 102 магнитно-резонансной катушки содержит первую зажимную часть 104’ и вторую зажимную часть 106’. Здесь также есть первый антенный участок 108’, встроенный в первую зажимную часть 104, и второй антенный участок 110, встроенный во вторую зажимную часть 106’. Антенна в этом примере отличается от антенны, показанной на фиг. 1. В этом случае антенные участки 108’, 106’ образуют поверхностные катушки вокруг фидуциального маркера 118. Есть защелка 602, которая удерживает вместе две зажимные части 104’, 106’. Есть первый электрический контакт 604 на конце первого антенного участка 108’ и второй электрический контакт 606 на другом конце второго антенного участка 110’. Зажим 602 сжимает вместе первый и второй электрические контакты 604, 606. При закрытом положении первый антенный участок 108’ и второй антенный участок 110’ образуют вокруг фидуциального маркера 118 одну поверхностную катушку или антенну. Первая катушка посредством вывода 112 может быть соединена с радиочастотным приемником системы магнитно-резонансной томографии. Две зажимные части 104’, 106’ показаны как соединенные шарнирно посредством оси 116.
Фиг. 7 показывает еще один пример медицинского аппарата 700. Этот медицинский аппарат 700 подобен медицинскому аппарату 600, показанному на фиг. 6. Но вместо подключенного к приемнику вывода 112 фидуциальный маркер 700 имеет приемник 704, который подсоединен непосредственно к поверхностной катушке 108’, 110’. Есть электрическая батарея 702 для запитывания приемника 704 и передатчика 706. Передатчик 706 снимает сигнал, принятый приемником 704, и повторно передает его в систему магнитно-резонансной томографии. Батарея 702 может быть заменена на подачу питания посредством кабеля или на любое другое средство приема энергии. Приемник 704 по существу оцифровывает сигнал на поверхностной катушке 108’, 110’, а затем передатчик 706 использует протокол, чтобы передать его в систему магнитно-резонансной томографии. Передатчик 706 может быть, например, передатчиком типа Wi-Fi или Bluetooth или передатчиком другой системы радиопередачи, кроме того, он также может быть передан оптически, например, посредством волоконной оптики. Конфигурация приемника и передатчика, показанная на фиг. 7 также может быть применена к другим вариантам осуществления, таким как показанный на фиг. 1.
Фиг. 8 показывает дополнительный пример медицинского аппарата 800. Этот показанный на фиг. 8 медицинский аппарат 800 очень похож на аппарат, показанный на фиг. 7. Однако здесь дополнительно присутствует визуальный индикатор 802. Например, здесь может быть встроенный переключатель, который замкнут, когда фидуциальный маркер 118 установлен должным образом. Альтернативно, если фидуциальный маркер 118 присутствует, то может также изменяться импеданс поверхностной катушки 108’, 110’. Приемник 704 мог бы быть, например, заменен на приемопередатчик, который способен измерять импеданс поверхностной катушки 108’, 110’. Когда фидуциальный маркер 118 обнаружен, то визуальный индикатор 802 может загореться, чтобы указать оператору, что фидуциальный маркер 118 установлен правильно. Такой индикатор 802 может быть использован также в примере, показанном на фиг. 1.
На фиг. 1, фиг. 6, фиг. 7 и фиг. 8 может быть использован любой из фидуциальных маркеров, показанных или описанных в данной заявке. Кроме того, фидуциальный маркер, показанный на фиг. 2-5 может иметь с одной стороны клейкий слой, чтобы прикреплять его к объекту или к поверхности предмета.
Фиг. 9 показывает пример схемы 900 контура антенны магнитного резонанса. Фиг. 10 и 11 показывают еще один пример медицинского аппарата 1000.
Фиг. 10 показывает вид 1002 в перспективе, а фиг. 11 показывает вид 1100 сверху дополнительного примера узла 1000 магнитно-резонансной катушки. Этот механизм аналогичен тому, который показан на фиг. 1. Однако здесь нет открытого пространства вокруг седлообразных катушек. Две зажимные части 104, 106 соединены посредством шарнира 1004. Зажимные части 104, 106 зажаты на стержне 1006 и фидуциальном маркере 300. Имеется фиксирующий и выравнивающий паз 1008 ромбической формы. Есть также зазор 1010 между двумя зажимными частями 104, 106. Фидуциальный маркер 300 частично окружен внутренними седлообразными катушками. Стрелки 1012 отмечают направление закрывающих сил, развиваемых внутренней пружиной.
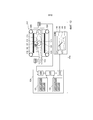
Фиг. 12 показывает медицинский аппарат 1200 в соответствии с вариантом осуществления настоящего изобретения. Медицинский аппарат 1200 включает в себя систему 1202 магнитно-резонансной томографии. Система 1202 магнитно-резонансной томографии содержит открытый магнит 1204. В этом открытом магните одна на другой установлены две сверхпроводящие катушки, и они создают магнитное поле подобным же образом, как это делала бы катушка Гельмгольца. Преимущество открытого магнита 1204 состоит в том, что он обеспечивает легкий доступ к субъекту 1210.
Магнит 1204 имеет криостат со сверхпроводящими обмотками, охлаждаемый жидким гелием. Кроме того, можно использовать постоянные или резистивные магниты. Возможно также использование магнитов различных типов, например, можно также использовать и разделенный цилиндрический магнит, и цилиндрический магнит, хотя оба их использовать менее удобно, чем открытый магнит. Разделенный цилиндрический магнит похож на стандартный цилиндрический магнит, за исключением того, что криостат разделен на две части, чтобы разрешить доступ к изо-плоскостям магнита. Открытый магнит имеет две секции магнита, одна над другой с промежутком между ними, который является достаточно большим, чтобы принимать в себя субъекта; как упоминалось ранее, конфигурация этих двух секций подобна конфигурации катушки Гельмгольца. Открытые магниты являются популярными, потому что субъект при этом менее стеснен. Внутри криостата цилиндрического магнита есть набор сверхпроводящих катушек. Внутри магнита 1204 имеется зона 1208 томографирования, где магнитное поле является сильным и достаточно равномерным для проведения магнитно-резонансной томографии.
На внутренней стороне магнита 1204 имеются градиентные катушки 1206 магнитного поля, которые, используются для получения магнитно-резонансных данных, чтобы осуществлять пространственное кодирование магнитных спинов в пределах зоны томографирования магнита. Градиентные катушки 1206 магнитного поля подсоединены к градиентной катушке источника 1207 питания. Градиентная катушка магнитного поля выполнена таким образом, что является типичной. Обычно градиентные катушки магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех взаимно-ортогональных пространственных направлениях. Ток в градиентные катушки магнитного поля подает градиентный источник питания магнитного поля. Ток, подаваемый в катушки магнитного поля, управляется как функция времени и может быть постепенно возрастающим или импульсным. Субъект 1210 лежит на опоре 1212 субъекта и частично находится в зоне 1208 томографирования.
Поверхностную катушку 1214 можно рассматривать как находящуюся на поверхности субъекта 1210. Поверхностная катушка 1214 представляет собой радиоантенну для манипулирования ориентацией магнитных спинов в зоне томографирования, а также для приема передач радиосигналов от спинов в зоне томографирования. Поверхностная катушка 1214 подсоединена к приемопередатчику 1216. Радиочастотный приемопередатчик 1216 может быть заменен на отдельные передающую и приемную катушки и отдельный передатчик и приемник. Следует понимать, что радиочастотный приемопередатчик является просто типичным. Поверхностная катушка предназначена для реализации специализированной передающей антенны и специализированной приемной антенны. Система магнитно-резонансной томографии, кроме того, может, например, включать в себя катушку для тела для возбуждения магнитных спинов. Аналогичным же образом приемопередатчик также может представлять собой отдельный передатчик и приемник. Приемопередатчик 1216 является многоканальным приемопередатчиком, и он подключен к узлу 102 магнитно-резонансной катушки и к поверхностной катушке 1214. Узел 102 магнитно-резонансной катушки прижат вокруг фидуциального маркера 300. Вместо описанных могут быть использованы другие примеры узлов магнитно-резонансной катушки и фидуциальных маркеров. Кроме того, могут быть использованы более одного узла магнитно-резонансной катушки и фидуциального маркера.
Внутри субъекта 1210 есть целевая зона 1218. Внутрь субъекта 1210 введен стержень или игла 1220. На стержне 1220 находится магнитно-резонансный фидуциальный маркер 300. Магнитно-резонансный фидуциальный маркер 300 подсоединен также к приемопередатчику 1216. Этот приемопередатчик 1216 и источник питания 1207 градиентной катушки подключены к аппаратному интерфейсу 1226 компьютерной системы 1224. Компьютерная система, далее, включает в себя процессор 1228. Процессор 1228 использует аппаратный интерфейс 1226 для передачи и приема сигналов управления в систему 1202 магнитно-резонансной томографии. Процессор 1228 может управлять системой 1202 магнитно-резонансной томографии через аппаратный интерфейс 1226.
Процессор 1228 далее подсоединен к пользовательскому интерфейсу 1230, к компьютерному запоминающему устройству 1232 и к компьютерной памяти 1234. Компьютерное запоминающее устройство 1232 показано содержащим магнитно-резонансные данные 1240. Кроме того, компьютерное запоминающее устройство 1232 показано содержащим магнитно-резонансное изображение 1242, реконструированное по магнитно-резонансным данным 1240. Компьютерное запоминающее устройство 1232 также показано как содержащее местоположение 1244 целевой зоны 1218. Оно представляет собой координаты целевой зоны 1218. Компьютерное запоминающее устройство 1232 также показано как содержащее данные 1246 о местоположении магнитного резонанса. Компьютерное запоминающее устройство 1232 показано далее как содержащее изображение 1248, которое было представлено и показывает положение стержня 1220 по отношению к целевой зоне 1218.
Компьютерная память 1234 дополнительно показана содержащей модуль 1250 управления. Модуль 1250 управления содержит исполняемый машиной код для управления работой и функционированием медицинского аппарата 1200. Компьютерная память 1234 показана далее как содержащая модуль 1252 определения местоположения. Модуль 1252 определения местоположения, используя данные 1246 о местоположении магнитного резонанса, может определить местоположение магнитно-резонансного фидуциального маркера 300. Компьютерная память 1234 дополнительно показана как содержащая модуль 1254 сегментации изображения. Модуль 1254 сегментации изображения выполнен с возможностью определения местоположения целевых зон, точки входа стержня и (или) анатомических структур посредством использования магнитно-резонансного изображения 1242. Компьютерная память 1234 показана далее как содержащая модуль 1256 представления. Модуль 1256 представления используется для генерации изображения 1248 с использованием, как минимум, данных 1246 о местоположении магнитного резонанса и данных 1244 о нахождении целевой зоны. Компьютерная память 1234 также показана как содержащая модуль 1258 реконструкции изображения. Модуль 1258 реконструкции изображения содержит исполняемый машиной код для реконструкции магнитно-резонансного изображения 1242 по магнитно-резонансным данным 1240.
В качестве части пользовательского интерфейса 1230 на устройстве отображения отображается графический интерфейс 1260 пользователя. На графическом интерфейсе 1260 пользователя присутствует изображение 1262. Это может быть магнитно-резонансное изображение или же это может быть изображение, которое является сгенерированным. В пределах изображения 1262 показано расположение субъекта 1264. Внутри субъекта 1264 есть целевая зона 1268. Есть игла 1270, при этом показано также ее положение относительно целевой зоны 1268. Точка, отмеченная позицией 1272, является точкой входа 1272 стержня 1220 в субъекта 1210, 1264.
Фиг. 13 показывает блок-схему, которая иллюстрирует альтернативный способ работы медицинского аппарата, показанного на фиг. 12. На этапе 1300 получают магнитно-резонансные данные. На этапе 1302, используя магнитно-резонансные данные, реконструируют магнитно-резонансное изображение. На этапе 1304 принимают выбор целевого объема в субъекте. Это, например, может быть выполнено вручную, и выбор может быть принят по графическому интерфейсу пользователя. В других вариантах осуществления целевой объем идентифицируют на магнитно-резонансном изображении автоматически с использованием модуля сегментации. Затем на этапе 1306 от маркера местоположения первого магнитного резонанса получают данные о местоположении магнитного резонанса. На этапе 1308 на устройстве отображения представляют проекцию. Эта проекция показывает местоположение стержня по отношению к целевому объему. В некоторых вариантах осуществления на этой проекции отображают также магнитно-резонансное изображение. Этапы 1306 и 1308 во время процедуры повторяют с использованием интервенционного устройства.
Фиг. 14 показывает блок-схему, которая иллюстрирует альтернативный способ работы медицинского аппарата, показанного на фиг. 12. На этапе 1400 получают магнитно-резонансные данные. На этапе 1402, используя магнитно-резонансные данные, реконструируют магнитно-резонансное изображение. На этапе 1404 принимают выбор целевого объема на магнитно-резонансном изображении. На этапе 1406 от маркера местоположения первого магнитного резонанса получают данные о местоположении магнитного резонанса. Затем на этапе 1408 повторно получают магнитно-резонансные данные. На этапе 1410 реконструируют магнитно-резонансное изображение с использованием повторно полученных магнитно-резонансных данных. На этапе 1412 представляют проекцию на устройстве отображения. Эта проекция определяет расположение стержня по отношению к целевому объему, а в качестве части проекции на дисплей выводят магнитно-резонансное изображение. Этапы 1406, 1408, 1410, и 1412 во время проведения процедуры повторяют с использованием содержащего стержень интервенционного устройства.
В то время как изобретение было проиллюстрировано и подробно описано на чертежах и в вышеприведенном описании, такие иллюстрацию и описание и следует рассматривать как иллюстративные или взятые в качестве примера, а не как ограничительные: настоящее изобретение не ограничено раскрытыми вариантами осуществления.
Специалистами в области техники при практической реализации заявленного изобретения в результате изучении чертежей, описания и приложенных пунктов формулы изобретения могут быть придуманы и внесены другие изменения в раскрытые варианты осуществления. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а признак единственного числа не исключает множества. Один процессор или другой блок может выполнять функции нескольких элементов, перечисленных в пунктах формулы изобретения.
Тот простой факт, что некоторые меры указываются во взаимно различных зависимых пунктах формулы изобретения, не означает, что для получения преимущества не может быть использована комбинация этих мер. Компьютерная программа может храниться или распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, поставляемом вместе с другим аппаратным обеспечением или как его часть, но может распространяться и в других формах, например, как через интернет или через другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные обозначения в пунктах формулы изобретения не должны толковаться как ограничивающие его объем.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
100 - медицинский аппарат
102 - узел магнитно-резонансной катушки
102’ - узел магнитно-резонансной катушки
104 - первая зажимная часть
104’ - первая зажимная часть
106 - вторая зажимная часть
106’ - вторая зажимная часть
108 - первый антенный участок
108’ - первый антенный участок
110 - второй антенный участок
110’ - второй антенный участок
111 - приемный сигнальный объем
112 - антенное соединение
114 - упругий элемент
116 - ось
117 - ручка
118 - фидуциальный маркер
200 - вид в перспективе
202 - вид в поперечном сечении
204 – испускающее МР-сигнал вещество
206 - обрамляющий материал
300 - фидуциальный маркер
302 - вид в перспективе
304 - вид в поперечном сечении
306 - отверстие
400 - фидуциальный маркер
402 - вид в перспективе
404 - вид в поперечном сечении
406 - удаляемая пробка
408 - зазор
500 - фидуциальный маркер
502 - вид в перспективе
504 - вид в поперечном сечении
506 - стержень
600 - медицинский аппарат
602 - защелка
604 - первый электрический контакт
606 - второй электрический контакт
700 - медицинский аппарат
702 - батарея
704 - передатчик
706 - передатчик
800 - медицинский аппарат
802 - визуальный индикатор
900 - контур антенны магнитного резонанса
1000 - медицинский аппарат
1002 - вид в перспективе
1004 - шарнир
1006 - стержень
1008 - выравнивающий и фиксирующий паз
1010 - зазор или отверстие
1100 - вид сверху
1200 - медицинский аппарат
1202 - система магнитно-резонансной томографии
1204 - открытый магнит
1206 - градиентная катушка
1207 - источник питания градиентной катушки
1208 - зона томографирования
1210 - субъект
1212 - опора субъекта
1214 - поверхностная катушка
1216 - приемопередатчик
1218 - целевая зона
1220 - стержень
1224 - компьютерная система
1226 - аппаратный интерфейс
1228 - процессор
1230 - пользовательский интерфейс
1232 - компьютерное запоминающее устройство
1234 - компьютерная память
1240 - магнитно-резонансные данные
1242 - магнитно-резонансное изображение
1244 - местоположение целевой зоны
1246 - данные о местоположении магнитного резонанса
1248 - изображение
1250 - модуль управления
1252 - модуль определения местоположения
1254 - модуль сегментации изображения
1256 - модуль представления
1258 - модуль реконструкции изображения
1260 - графический интерфейс пользователя
1262 - изображение
1264 - субъект
1268 - целевая зона
1270 - стержень
1272 - точка входа стержня
Claims (23)
1. Медицинский аппарат (100), содержащий узел (102, 102’) магнитно-резонансной катушки, содержащий:
- фидуциальный маркер (118, 300, 400, 500), в частности, содержащий стержень (506, 1220) медицинского устройства или выполненный с возможностью приема упомянутого стержня,
- антенну магнитного резонанса, содержащую первый антенный участок (108, 108’) и второй антенный участок (110, 110’) для приема данных (1246) о местоположении магнитного резонанса от фидуциального маркера (118, 300, 400, 500); и
- зажим, содержащий первую зажимную часть (104, 104’) и вторую зажимную часть (106, 106’), при этом первая зажимная часть и вторая зажимная часть выполнены с возможностью их перемещения между открытой конфигурацией и закрытой конфигурацией, при этом первая зажимная часть содержит первый антенный участок, при этом вторая зажимная часть содержит второй антенный участок, причем при закрытой конфигурации первая зажимная часть и вторая зажимная часть закрепляют фидуциальный маркер внутри приемного сигнального объема (111) между первым антенным участком и вторым антенным участком, причем при открытом положении первой зажимной части и второй зажимной части фидуциальный маркер вставляется в упомянутый приемный сигнальный объем или вынимается из него.
2. Медицинский аппарат по п. 1, причем узел магнитно-резонансной катушки дополнительно содержит передатчик (706), выполненный с возможностью приема сигнала магнитного резонанса от антенны магнитного резонанса и передачи его в систему (1202) магнитно-резонансной томографии.
3. Медицинский аппарат по п. 1, причем первый антенный участок представляет собой первую седлообразную катушку (108), и причем второй антенный участок представляет собой вторую седлообразную катушку (110).
4. Медицинский аппарат по п. 1, причем первая зажимная часть содержит первый электрический контакт (604), соединенный с первым антенным участком, причем вторая зажимная часть содержит второй электрический контакт (606), соединенный со вторым антенным участком, при этом зажим выполнен с возможностью подсоединения первого электрического контакта ко второму электрическому контакту с образованием электрического соединения, и при этом первый антенный участок (108’) и второй антенный участок (110’) выполнены с возможностью образования одной поверхностной катушки.
5. Медицинский аппарат по п. 1, причем узел магнитно-резонансной катушки дополнительно содержит воспринимающую фидуциальный маркер систему (704) для восприятия фидуциального маркера.
6. Медицинский аппарат по п. 5, причем воспринимающая фидуциальный маркер система содержит любое из следующего: переключатель для восприятия того, находится ли зажим в закрытой конфигурации, систему (704) измерения импеданса для измерения импеданса антенны магнитного резонанса, чтобы определять, находится ли фидуциальный маркер внутри приемного сигнального объема, и/или определять тип фидуциального маркера, и их комбинации.
7. Медицинский аппарат по п. 5, дополнительно содержащий индикатор (802), выполненный с возможностью отображения сигнала, если воспринимающая фидуциальный маркер система воспринимает фидуциальный маркер.
8. Медицинский аппарат по п. 1, причем фидуциальный маркер содержит стержень (506, 1220) медицинского устройства или выполнен с возможностью приема этого стержня.
9. Медицинский аппарат по п. 8, причем зажим выполнен с возможностью закрепления стержня к узлу магнитно-резонансной катушки при закрытой конфигурации.
10. Медицинский аппарат по п. 8, причем фидуциальный маркер содержит отверстие (306) для стержня, причем фидуциальный маркер является тороидальным, и причем фидуциальный маркер содержит трубку (204), заполненную способным определять магнитный резонанс веществом, окружающим стержень, причем эта трубка имеет зазор, и причем стержень выполнен с возможностью его извлечения через этот зазор под прямым углом к отверстию.
11. Медицинский аппарат по п. 8, причем фидуциальный маркер содержит клеящее вещество для крепления к объекту.
12. Медицинский аппарат по любому из предшествующих пунктов, дополнительно содержащий:
- систему (1202) магнитно-резонансной томографии для получения магнитно-резонансных данных (1240) от субъекта (1210);
- медицинское устройство (1220), содержащее стержень, при этом стержень выполнен с возможностью его введения в субъекта, и при этом фидуциальный маркер выполнен с возможностью его крепления к стержню;
- процессор (1228) для управления медицинским аппаратом;
- память (1232, 1234), хранящую исполняемые машиной инструкции для их исполнения процессором;
при этом исполнение инструкций заставляет процессор получать (1300, 1400) магнитно-резонансные данные, при этом исполнение инструкций дополнительно заставляет процессор реконструировать (1302, 1402) упомянутые магнитно-резонансные данные в магнитно-резонансное изображение, при этом исполнение инструкций дополнительно заставляет процессор принимать (1304, 1404) выбор целевого объема в пределах упомянутого магнитно-резонансного изображения, и
при этом исполнение инструкций дополнительно заставляет процессор повторно:
- получать (1306, 1406) данные о местоположении магнитного резонанса от антенны магнитного резонанса, при этом данные о местоположении магнитного резонанса являются описательными относительно местоположения фидуциального маркера первого магнитного резонанса,
- представлять (1308, 1412) на устройстве отображения проекцию магнитно-резонансных данных, указывающих положение стержня относительно целевой зоны, при этом проекция определяется с использованием по меньшей мере упомянутых данных о местоположении и упомянутого местоположения целевого объема.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13196450 | 2013-12-10 | ||
| EP13196450.4 | 2013-12-10 | ||
| PCT/EP2014/076807 WO2015086480A1 (en) | 2013-12-10 | 2014-12-08 | Magnetic resonance coil assembly for fiducial markers |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2665343C1 true RU2665343C1 (ru) | 2018-08-29 |
Family
ID=49753043
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2016127522A RU2665343C1 (ru) | 2013-12-10 | 2014-12-08 | Узел магнитно-резонансной катушки для фидуциальных маркеров |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20160302880A1 (ru) |
| EP (1) | EP3080631A1 (ru) |
| JP (1) | JP6397026B2 (ru) |
| CN (1) | CN105849575B (ru) |
| RU (1) | RU2665343C1 (ru) |
| WO (1) | WO2015086480A1 (ru) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD875941S1 (en) * | 2017-07-27 | 2020-02-18 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD875942S1 (en) * | 2017-07-27 | 2020-02-18 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD882090S1 (en) * | 2018-01-26 | 2020-04-21 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| US10521916B2 (en) | 2018-02-21 | 2019-12-31 | Covidien Lp | Locating tumors using structured light scanning |
| CN111770726B (zh) * | 2018-03-09 | 2024-09-17 | 香港大学 | Mri跟踪装置的设计、制造以及用于mri引导机器人系统的使用方法 |
| USD875944S1 (en) * | 2018-07-26 | 2020-02-18 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD884185S1 (en) * | 2019-01-29 | 2020-05-12 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD881397S1 (en) * | 2019-01-29 | 2020-04-14 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD879297S1 (en) * | 2019-01-29 | 2020-03-24 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| USD874653S1 (en) * | 2019-01-29 | 2020-02-04 | Ankon Medical Technologies (Shanghai) Co., Ltd. | Radiopaque marker |
| US10610280B1 (en) | 2019-02-02 | 2020-04-07 | Ayad K. M. Agha | Surgical method and apparatus for destruction and removal of intraperitoneal, visceral, and subcutaneous fat |
| JP2022526626A (ja) | 2019-04-08 | 2022-05-25 | アクティブ サージカル, インコーポレイテッド | 医療撮像のためのシステムおよび方法 |
| WO2021035094A1 (en) | 2019-08-21 | 2021-02-25 | Activ Surgical, Inc. | Systems and methods for medical imaging |
| WO2023091515A1 (en) * | 2021-11-16 | 2023-05-25 | Activ Surgical, Inc. | Systems and methods for medical imaging |
| KR102684165B1 (ko) * | 2023-10-24 | 2024-07-12 | 한국중부발전(주) | 통전 표시 장치 |
| KR102684164B1 (ko) * | 2023-10-24 | 2024-07-12 | 한국중부발전(주) | 통전 표시 장치 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5307806A (en) * | 1993-08-10 | 1994-05-03 | Board Of Regents Of Univ. Of Nebraska | NMR pelvic coil |
| US5502387A (en) * | 1994-08-23 | 1996-03-26 | Northrop Grumman Corporation | Variable geometry MRI coil |
| RU2410136C2 (ru) * | 2005-07-08 | 2011-01-27 | Пнн Медикал А/С | Способ направления оборудования для лучевой терапии |
| US20130131498A1 (en) * | 2011-09-28 | 2013-05-23 | General Electric Company | Adjustable mri head coil apparatus and mri system |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69023153T2 (de) * | 1989-02-27 | 1996-04-18 | Medrad, Inc., Pittsburgh, Pa. | Sonde für Körperhöhlen und Schnittstelleneinrichtung für Magnetresonanzdarstellung und Spektroskopie. |
| US5469847A (en) * | 1992-09-09 | 1995-11-28 | Izi Corporation | Radiographic multi-modality skin markers |
| IT1282664B1 (it) * | 1996-02-21 | 1998-03-31 | Bracco Spa | Dispositivo per la standardizzazione dell'intensita' di segnale nella tecnica di formazione di immagini a risonanza magnetica |
| DE69828011T2 (de) * | 1997-09-26 | 2005-12-01 | Koninklijke Philips Electronics N.V. | Vorrichtung zur Halterung eines chirurgischen Instruments |
| US6198961B1 (en) * | 1998-11-12 | 2001-03-06 | Picker International, Inc. | Interventional radio frequency coil assembly for magnetic resonance (MR) guided neurosurgery |
| US6591128B1 (en) * | 2000-11-09 | 2003-07-08 | Koninklijke Philips Electronics, N.V. | MRI RF coil systems having detachable, relocatable, and or interchangeable sections and MRI imaging systems and methods employing the same |
| EP1864624B1 (en) * | 2005-03-31 | 2015-04-01 | Olympus Medical Systems Corp. | Surgery assisting apparatus |
| JP3112702U (ja) * | 2005-05-12 | 2005-08-25 | 株式会社日立メディコ | 受信コイルおよび磁気共鳴撮影装置 |
| US7702378B2 (en) * | 2005-11-17 | 2010-04-20 | Breast-Med, Inc. | Tissue marker for multimodality radiographic imaging |
| US7394256B2 (en) * | 2005-11-23 | 2008-07-01 | Koninklijke Philips Electronics N.V. | Wrist coil for magnetic resonance imaging |
| GB0709114D0 (en) * | 2007-05-11 | 2007-06-20 | Pulseteq Ltd | Apparatus and method for magnetic resonance scanning |
| JP5430560B2 (ja) * | 2007-06-07 | 2014-03-05 | エムアールアイ・インターヴェンションズ,インコーポレイテッド | Mri誘導介入システム |
| CA2700523A1 (en) * | 2007-09-24 | 2009-04-02 | Surgivision, Inc. | Mri-guided medical interventional systems and methods |
| US20100113912A1 (en) * | 2008-11-03 | 2010-05-06 | Traboulsi Maeghan E | Small diameter mri marker and related method |
| EP2478383A1 (en) * | 2009-09-14 | 2012-07-25 | INSERM (Institut National de la Santé et de la Recherche Médicale) | Calibration phantom and method for measuring and correcting geometric distorsions in medical images |
| US8406853B2 (en) * | 2010-11-12 | 2013-03-26 | Imris Inc. | Multi transmit/receive head array coil with removable panels |
| US9063184B2 (en) * | 2011-02-09 | 2015-06-23 | International Business Machines Corporation | Non-contact current-sensing and voltage-sensing clamp |
| EP2508907A1 (en) * | 2011-04-07 | 2012-10-10 | Koninklijke Philips Electronics N.V. | Magnetic resonance guidance of a shaft to a target zone |
| MX2014003149A (es) * | 2011-09-19 | 2014-05-07 | Koninkl Philips Nv | Dispositivo de bobina para imagenologia por resonancia magnetica e intervencionista integrado, metodo y sistema. |
| EP2629111A1 (en) * | 2012-02-14 | 2013-08-21 | Koninklijke Philips Electronics N.V. | Active position marker system for use in an MRI apparatus |
| WO2014005225A1 (en) * | 2012-07-03 | 2014-01-09 | 7D Surgical Inc. | Attachments for tracking handheld implements |
| EP2883070B1 (en) * | 2012-08-08 | 2020-10-07 | Koninklijke Philips N.V. | Endorectal prostate coil with open access for surgical instruments |
-
2014
- 2014-12-08 US US15/100,652 patent/US20160302880A1/en not_active Abandoned
- 2014-12-08 JP JP2016536170A patent/JP6397026B2/ja not_active Expired - Fee Related
- 2014-12-08 EP EP14812722.8A patent/EP3080631A1/en not_active Withdrawn
- 2014-12-08 WO PCT/EP2014/076807 patent/WO2015086480A1/en active Application Filing
- 2014-12-08 CN CN201480067582.3A patent/CN105849575B/zh not_active Expired - Fee Related
- 2014-12-08 RU RU2016127522A patent/RU2665343C1/ru active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5307806A (en) * | 1993-08-10 | 1994-05-03 | Board Of Regents Of Univ. Of Nebraska | NMR pelvic coil |
| US5502387A (en) * | 1994-08-23 | 1996-03-26 | Northrop Grumman Corporation | Variable geometry MRI coil |
| RU2410136C2 (ru) * | 2005-07-08 | 2011-01-27 | Пнн Медикал А/С | Способ направления оборудования для лучевой терапии |
| US20130131498A1 (en) * | 2011-09-28 | 2013-05-23 | General Electric Company | Adjustable mri head coil apparatus and mri system |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015086480A1 (en) | 2015-06-18 |
| JP2017502724A (ja) | 2017-01-26 |
| US20160302880A1 (en) | 2016-10-20 |
| CN105849575B (zh) | 2020-11-27 |
| JP6397026B2 (ja) | 2018-09-26 |
| EP3080631A1 (en) | 2016-10-19 |
| CN105849575A (zh) | 2016-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2665343C1 (ru) | Узел магнитно-резонансной катушки для фидуциальных маркеров | |
| US10251579B2 (en) | Magnetic resonance guidance of a shaft to a target zone | |
| JP6169573B2 (ja) | 磁気共鳴撮像中における既定の体積内の無線周波数伝送場の減少 | |
| US10939876B2 (en) | Dedicated user interface for MR-guided interstitial interventions | |
| US9968280B2 (en) | Method for insertion of a medical device within a body during a medical imaging process | |
| EP2442718B1 (en) | Mri-guided devices and mri-guided interventional systems that can track and generate dynamic visualizations of the devices in near real time | |
| WO2003005902A1 (fr) | Procede de saisie d'images endoscopiques et dispositif d'irm l'utilisant | |
| US12070300B2 (en) | Automatic positioning of antenna connectors for magnetic resonance imaging | |
| BR112015031164B1 (pt) | Conjunto de suporte para um indivíduo para um sistema de imageamento por ressonância magnética, e, sistema de imageamento por ressonância magnética utilizando o suporte | |
| Elayaperumal et al. | Autonomous real-time interventional scan plane control with a 3-D shape-sensing needle | |
| Reichert et al. | GantryMate: a modular MR-compatible assistance system for MR-guided needle interventions | |
| Tokuda et al. | Software strategy for robotic transperineal prostate therapy in closed-bore MRI | |
| US20150331073A1 (en) | Magnetic resonance tomography apparatus and method for assisting a person when positioning a medical instrument for a percutaneous intervention | |
| Kaiser et al. | Interventional MRI: Minimal-invasive Surgery under MR guidance | |
| JP2005253706A (ja) | 手術ナビゲーション装置を備えた磁気共鳴イメージング装置 | |
| Zhai et al. | Breast coil for real time MRI guided interventional device |