RU2629738C1 - Экзоскелет верхних конечностей - Google Patents
Экзоскелет верхних конечностей Download PDFInfo
- Publication number
- RU2629738C1 RU2629738C1 RU2016109511A RU2016109511A RU2629738C1 RU 2629738 C1 RU2629738 C1 RU 2629738C1 RU 2016109511 A RU2016109511 A RU 2016109511A RU 2016109511 A RU2016109511 A RU 2016109511A RU 2629738 C1 RU2629738 C1 RU 2629738C1
- Authority
- RU
- Russia
- Prior art keywords
- shoulder
- forearm
- module
- proximal
- distal
- Prior art date
Links
- 210000001364 upper extremity Anatomy 0.000 title claims abstract description 17
- 210000002832 shoulder Anatomy 0.000 claims abstract description 56
- 210000000245 forearm Anatomy 0.000 claims abstract description 55
- 210000002310 elbow joint Anatomy 0.000 claims abstract description 21
- 230000006978 adaptation Effects 0.000 claims abstract description 15
- 210000003414 extremity Anatomy 0.000 claims abstract description 8
- 210000000707 wrist Anatomy 0.000 claims description 4
- 230000006870 function Effects 0.000 abstract description 9
- 239000003814 drug Substances 0.000 abstract description 2
- 239000000126 substance Substances 0.000 abstract 1
- 210000004247 hand Anatomy 0.000 description 6
- 238000012360 testing method Methods 0.000 description 5
- 206010033885 Paraparesis Diseases 0.000 description 4
- 210000003813 thumb Anatomy 0.000 description 4
- 208000033952 Paralysis flaccid Diseases 0.000 description 3
- 208000028331 flaccid paralysis Diseases 0.000 description 3
- 230000007659 motor function Effects 0.000 description 3
- 208000007542 Paresis Diseases 0.000 description 2
- 210000003205 muscle Anatomy 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 210000000323 shoulder joint Anatomy 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 208000024891 symptom Diseases 0.000 description 2
- 208000011580 syndromic disease Diseases 0.000 description 2
- XUKUURHRXDUEBC-KAYWLYCHSA-N Atorvastatin Chemical compound C=1C=CC=CC=1C1=C(C=2C=CC(F)=CC=2)N(CC[C@@H](O)C[C@@H](O)CC(O)=O)C(C(C)C)=C1C(=O)NC1=CC=CC=C1 XUKUURHRXDUEBC-KAYWLYCHSA-N 0.000 description 1
- 206010011732 Cyst Diseases 0.000 description 1
- 206010027925 Monoparesis Diseases 0.000 description 1
- 206010033799 Paralysis Diseases 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000017531 blood circulation Effects 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 208000031513 cyst Diseases 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 201000010099 disease Diseases 0.000 description 1
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000003902 lesion Effects 0.000 description 1
- 208000018360 neuromuscular disease Diseases 0.000 description 1
- 230000007170 pathology Effects 0.000 description 1
- 230000002035 prolonged effect Effects 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
- A61H1/0277—Elbow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0274—Stretching or bending or torsioning apparatus for exercising for the upper limbs
- A61H1/0281—Shoulder
Landscapes
- Rehabilitation Tools (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
Abstract
Изобретение относится к области медицины. Экзоскелет верхних конечностей содержит как минимум один внешний каркас для конечности, состоящий из элемента плеча, модулей плеча и предплечья, локтевого шарнира и кистедержателя. Элемент плеча, модули плеча и предплечья выполнены продолговатыми. Элемент плеча снабжен опорой для крепления внешнего каркаса. Модуль предплечья соединен с модулем плеча посредством локтевого шарнира с возможностью перемещения в горизонтальной плоскости. Модуль предплечья соединен с кистедержателем. Экзоскелет дополнительно снабжен опорно-адаптационным элементом для крепления к жилету или инвалидному креслу, к которому крепится как минимум одна опора для крепления внешнего каркаса, упругими элементами и зацепами для крепления концов упругих элементов. Модуль плеча состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации. Модуль предплечья состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации. Локтевой шарнир выполнен в виде двух шарнирно соединенных между собой короткими полками Г-образных элементов - проксимального и дистального. Высота Г-образных элементов зависит от длины окружности предплечья в области локтевого сгиба человека. Длинная полка Г-образного проксимального элемента локтевого шарнира поперечно и жестко соединена с дистальным узлом модуля плеча. Проксимальный узел модуля предплечья соединен с длинной полкой Г-образного дистального элемента локтевого шарнира с возможностью вращения вокруг оси, расположенной вдоль модуля предплечья. Зацепы для крепления концов упругих элементов закреплены на наружных поверхностях на опоре для крепления внешнего каркаса, элементе плеча, проксимальном и дистальном узлах модуля плеча, проксимальном и дистальном узлах модуля предплечья, проксимальном и дистальном элементах локтевого шарнира. Изобретение обеспечивает расширение функциональных возможностей устройства за счет возможности осуществления ротации кнаружи/ротации внутрь предплечья относительно плеча человека и увеличения амплитуды движений, а также обеспечения возможности настройки устройства к анатомической адаптации к телу человека и настройки функций в зависимости от характера применения устройства, как с облегчением движения, так и с его утяжелением при тренирующей функции. 6 ил., 3 табл.
Description
Изобретение относится к области медицины, а именно к устройству, предназначенному для увеличения остаточных сил мышц и расширения амплитуды движений верхних конечностей, и может быть использовано как для абилитации и реабилитации больных с вялым параличом (парапарезом) верхних конечностей, так и в качестве спортивного тренажера, а также при проведении работ, сопряженных с выполнением действий, связанных с длительным статическим нахождением верхних конечностей в вынужденном положении, например при работе хирурга, фотографа или кинооператора.
Синдром верхнего вялого паралича встречается при многих заболеваниях и, как следствие, у пациентов с верхним вялым параличом утрачиваются двигательные функции верхних конечностей. Для расширения двигательных функций верхних конечностей используют различные устройства.
Известно устройство для восстановления двигательных функций верхних конечностей, содержащее опорные элементы и фиксирующие элементы (см. описание изобретения к патенту Российской Федерации №2325895, МПК А61Н 1/02, A61F 5/01, опубл. 10.06.2008).
В качестве опорных элементов известное устройство содержит надеваемый на человека жилет соответствующего размера и манжеты с возможностью их закрепления на верхних конечностях. Фиксирующие элементы выполнены в виде упругих элементов, жестко связанных с соответствующими опорными элементами через регулятор натяжения и закрепляемых концами на жилете с возможностью расположения их на теле человека спереди, сбоку и сзади.
Известное устройство позволяет увеличить объем активных движений в плечевом и локтевом суставах за счет обеспечения возможности дозированной нагрузки на проксимальные отделы плеча и предплечья и дифференцированного облегчения выполнения произвольных движений. Вместе с тем оно имеет ряд недостатков. Известное устройство не имеет внешнего скелета и поэтому усилие от упругих элементов передается непосредственно на манжеты, плотно облегающие соответствующие участки тела (плечо и предплечье), что подвергает подлежащие ткани сдавлению, нарушая в них кровообращение при длительном ношении. В случае если манжеты будут установлены не плотно, то под действием упругих элементов они неизбежно смещаются к проксимальным частям предплечья и плеча до момента плотного облегания (сдавления), снижая натяжение упругих элементов. Отсутствие в известном устройстве жесткого внешнего каркаса (скелета) создает неопределенность позиционирования упругих элементов по отношению к частям тела человека, что затрудняет настройку и использование устройства. Кроме того, указанное расположение упругих элементов создает вектор сил, действующий вдоль оси конечности по направлению к плечевому суставу, подвергая его избыточной нагрузке. Известное устройство не может быть использовано в качестве спортивного тренажера, а также для облегчения работ, связанных со статическим напряжением рук.
При всем многообразии этиологии верхнего вялого смешанного паралича клиническая картина у таких пациентов в целом однотипна, при этом основные признаки симптомокомплекса требуют применения экзоскелета.
Известно устройство для содействия увеличению движения человека с нервно-мышечными нарушениями, принятое в качестве прототипа, содержащее как минимум один внешний каркас для конечности, состоящий из элемента плеча с опорой для крепления внешнего каркаса, модуля плеча, соединенного с модулем предплечья посредством локтевого шарнира с возможностью перемещения, модули плеча и предплечья включают пару планок: верхнюю и нижнюю, модуль предплечья соединен со второй опорой, выполненной в виде кистедержателя (лангета), и фиксируемые концами упругие элементы (см. описание изобретения к патенту US 20030023195, МПК A61F 5/00, опубл. 30.01.2003).
Известное устройство лишено мобильности, так как не имеет возможности монтажа на несущий жилет, одеваемый на человека. Внешний каркас конечности известного устройства крепят элементом плеча к опорной стойке, ограничивающей перемещение человека при эксплуатации устройства, что является его недостатком.
Известное устройство полностью лишено способности к анатомической адаптации к телу человека и может изготавливаться индивидуально только целиком. Каждая секция плеча и предплечья известного устройства выполнена в виде корпусного изделия, и для замены его элементов необходима полная разборка корпусного изделия, что затрудняет адаптацию устройства (переналадку устройства), поскольку не дает возможности производить замену (подбор) длин секций плеча и предплечья в зависимости от размеров верхней конечности человека.
Конструктивное выполнение локтевого шарнира обеспечивает соединение секций плеча и предплечья известного устройства только для выполнения движений в горизонтальной и вертикальной плоскостях. Модуль предплечья, шарнирно соединенный со второй опорой, выполненной в виде кисте держателя (лангета), не имеет возможности ротационного движения секции предплечья относительно секции плеча, что сужает возможности известного устройства.
Известное устройство не имеет многообразных функций и вариантов настройки в зависимости от степени и характера поражения мышц конечности и/или выполнения ими тренировочных движений, так как имеет только один вариант фиксации упругих элементов, направленный на поднятие руки вверх. Другие варианты наладки устройства конструктивно не предусмотрены.
Технической задачей и результатом предлагаемого изобретения является расширение функциональных возможностей устройства за счет возможности осуществления ротации кнаружи/ротации внутрь предплечья относительно плеча человека и увеличения амплитуды движений, а также обеспечения возможности настройки устройства к анатомической адаптации к телу человека и настройки функций в зависимости от характера применения устройства, как с облегчением движения, так и с его утяжелением при тренирующей функции.
Техническая задача решается тем, что экзоскелет верхних конечностей содержит как минимум один внешний каркас для конечности, состоящий из элемента плеча, модулей плеча и предплечья, локтевого шарнира и кистедержателя, при этом элемент плеча, модули плеча и предплечья выполнены продолговатыми, элемент плеча снабжен опорой для крепления внешнего каркаса, модуль предплечья соединен с модулем плеча посредством локтевого шарнира с возможностью перемещения в горизонтальной плоскости, модуль предплечья соединен с кистедержателем, при этом он дополнительно снабжен опорно-адаптационным элементом для крепления к жилету или инвалидному креслу, к которому крепится как минимум одна опора для крепления внешнего каркаса, упругими элементами и зацепами для крепления концов упругих элементов, модуль плеча состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации, модуль предплечья состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации, локтевой шарнир выполнен в виде двух шарнирно соединенных между собой короткими полками Г-образных элементов - проксимального и дистального, при этом высота Г-образных элементов зависит от длины окружности предплечья в области локтевого сгиба человека, длинная полка Г-образного проксимального элемента локтевого шарнира поперечно и жестко соединена с дистальным узлом модуля плеча, а проксимальный узел модуля предплечья соединен с длинной полкой Г-образного дистального элемента локтевого шарнира с возможностью вращения вокруг оси, расположенной вдоль модуля предплечья, зацепы для крепления концов упругих элементов закреплены на наружных поверхностях на опоре для крепления внешнего каркаса, элементе плеча, проксимальном и дистальном узлах модуля плеча, проксимальном и дистальном узлах модуля предплечья, проксимальном и дистальном элементах локтевого шарнира.
Экзоскелет верхних конечностей поясняется чертежами, где на фиг. 1 изображен общий вид устройства; на фиг. 2 - то же, вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 2; на фиг. 5 - вид Г на фиг. 2; на фиг. 6 - выносной элемент Д.
Предлагаемое устройство сконструировано модульно-сборным и в зависимости от патологии человека может быть использовано как для двух рук при парапарезе, так и для одной руки при монопарезе.
Предлагаемое устройство содержит опорно-адаптационный элемент, выполненный в виде пластины 1 с отверстиями для крепления конечностей (механических рук) к несущему жилету, надеваемому на человека, либо к инвалидному креслу (стулу) (жилет, инвалидное кресло на чертеже условно не показаны).
Опорно-адаптационный элемент может быть как односторонний, так и двусторонний, общий для двух внешних каркасов.
Каждый внешний каркас состоит из опоры 2, элемента плеча 3, модуля плеча, модуля предплечья и кистедержателя - второй опоры 4 в виде лонгеты.
Опора 2 одним концом жестко закреплена на пластине 1, а другим концом соединена с элементом плеча 3, представляющим собой пластину Z-образного сечения.
Модуль плеча выполнен продолговатым и состоит из проксимального узла 5, соединенного с дистальным узлом 6 съемными планками 7 и 8: верхней и нижней, а продолговатый модуль предплечья - из проксимального узла 9, соединенного с дистальным узлом 10 съемными планками 11 и 12: верхней и нижней. Съемные планки 7, 8, 11 и 12 позволяют при их подборе производить анатомическую адаптацию модулей плеча и предплечья внешнего каркаса к верхней конечности человека.
Модули плеча и предплечья соединены между собой посредством локтевого шарнира, выполненного в виде двух шарнирно соединенных между собой короткими полками Г-образных элементов, а именно проксимального элемента 13 и дистального элемента 14. Высота Г-образного локтевого шарнира анатомозависима, позволяет увеличить амплитуду движений в вертикальной плоскости и определяется в зависимости от длины окружности предплечья в области локтевого сгиба человека.
Длинная полка Г-образного проксимального элемента 13 локтевого шарнира соединена поперечно и жестко с дистальным узлом 6 модуля плеча. Длинная полка Г-образного дистального элемента 14 соединена с проксимальным узлом 9 модуля предплечья через узел для вращения (см. фиг. 6), состоящий из подшипника 15, взаимодействующего с осью 16, жестко закрепленной в проксимальном узле 9 модуля предплечья и расположенной вдоль модуля предплечья для обеспечения возможности вращения модуля предплечья вокруг оси 16. Узел для вращения обеспечивает возможность поворота модуля предплечья в локтевом шарнире (суставе), при котором ладонь занимает положение вниз и большой палец направлен внутрь, к срединной плоскости тела (пронация), и поворот предплечья в локтевом шарнире (суставе), при котором ладонь занимает положение вверх и большой палец направлен наружу, от срединной плоскости тела (супинация) с занятием промежуточных положений, расширяя функциональные возможности устройства.
Дистальный узел 10 модуля предплечья жестко соединен с L-образным элементом 17 для крепления кистедержателя - второй опоры 4.
По наружной поверхности устройства на опоре 2, элементе 3 плеча, проксимальном узле 5 и дистальном узле 6 модуля плеча, проксимальном узле 9 и дистальном узле 10 предплечья, проксимальном элементе 13 и дистальном элементе 14 локтевых шарниров закреплены зацепы 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28 и 29 соответственно. Зацепы 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28 и 29 предназначены для крепления концов упругих элементов в зависимости от показаний использования экзоскелета и выполнены, например, в виде оси с буртиком на конце для предотвращения соскальзывания упругих элементов. Упругие элементы выполнены, например, в виде резиновых колец (упругие элементы на чертеже условно не показаны). Наличие съемных упругих элементов позволяет осуществлять настройку функций в зависимости от характера применения устройства, как с облегчением движения, так и с его утяжелением при тренирующей функции.
Экзоскелет верхних конечностей используют следующим образом.
Экзоскелет крепят посредством опорно-адаптационного элемента 1 на жилете, который затем надевают на человека, а в случае необходимости крепление производят к инвалидному креслу-каталке.
Для обеспечения эффективного повышения двигательных возможностей верхних конечностей человека (облегчения поднятия рук) упругие элементы концами устанавливают на зацепы 21, 23 и 25, 27. Данное положение упругих элементов применяют и в тренирующей функции устройства, при этом количество и упругость выбирают такими, чтобы противодействовать усилию, опускающему руки. Для облегчения нахождения рук в вынужденном положении, например при работе фотографа, хирурга и др., количество упругих элементов (усилие ими развиваемое) выбирают таким, чтобы обеспечить свободное вывешивание рук в требуемом положении.
Для опускания рук человека вниз (тренирующая функция) упругие элементы концами устанавливают на зацепы 20, 22 и 24, 26.
Для создания усилия, обеспечивающего поворот модуля предплечья относительно модуля плеча, при котором ладонь занимает положение вниз и большой палец направлен внутрь, к срединной плоскости тела (пронация) упругие элементы концами устанавливают на зацепы 24, 28 таким образом, чтобы упругие элементы располагались по наружной поверхности устройства.
Для создания усилия, обеспечивающего поворот модуля предплечья относительно модуля плеча, при котором ладонь занимает положение вверх и большой палец направлен наружу, от срединной плоскости тела (супинация) упругие элементы концами устанавливают на зацепы 24, 28 таким образом, чтобы упругие элементы располагались по внутренней поверхности устройства.
Для создания усилия, осуществляющего разгибание в локтевом суставе, упругие элементы концами устанавливают на зацепы 28,29 по наружной поверхности локтевого шарнира.
Для создания усилия, осуществляющего сгибание в локтевом суставе, упругие элементы концами устанавливают на зацепы 28,29 по внутренней поверхности локтевого шарнира.
Чтобы осуществить движения элемента 3 плеча кзади, упругие элементы концами устанавливают на зацепы 18, 19, 20.
Апробация конструкции предлагаемого устройства и адаптация составляющих ее элементов выполнялась на семерых больных с синдромом верхнего пара (моно) пареза. В качестве примера использованы показания испытаний пациента с верхним периферическим парапарезом (Q74.3).
В таблице 1 приведены данные испытаний по элементам движений плеча при прямой верхней конечности до и после использования предлагаемого устройства.
В таблице 2 приведены данные испытаний по амплитуде движений пациента с верхним периферическим парапарезом в локтевом суставе правой и левой руки до и после использования предлагаемого устройства.
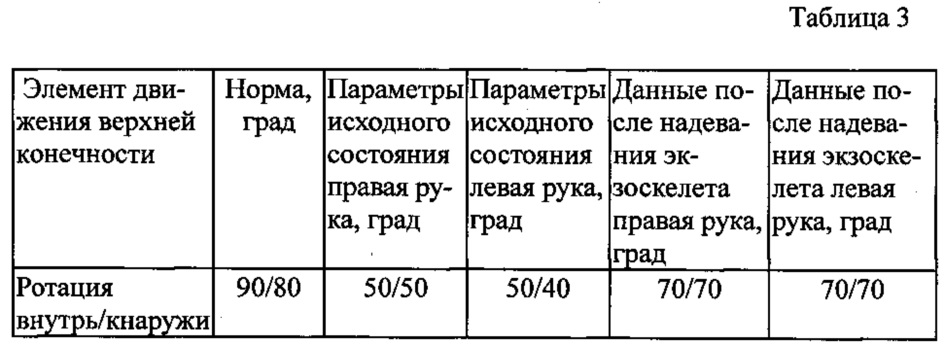
В таблице 3 приведены данные испытаний по элементам движений при повороте предплечья до и после использования предлагаемого устройства.


Claims (1)
- Экзоскелет верхних конечностей, содержащий как минимум один внешний каркас для конечности, состоящий из элемента плеча, модулей плеча и предплечья, локтевого шарнира и кистедержателя, при этом элемент плеча, модули плеча и предплечья выполнены продолговатыми, элемент плеча снабжен опорой для крепления внешнего каркаса, модуль предплечья соединен с модулем плеча посредством локтевого шарнира с возможностью перемещения в горизонтальной плоскости, модуль предплечья соединен с кистедержателем, отличающийся тем, что он дополнительно снабжен опорно-адаптационным элементом для крепления к жилету или инвалидному креслу, к которому крепится как минимум одна опора для крепления внешнего каркаса, упругими элементами и зацепами для крепления концов упругих элементов, модуль плеча состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации, модуль предплечья состоит из проксимального и дистального узлов, соединенных верхней и нижней съемными планками с возможностью подбора для анатомической адаптации, локтевой шарнир выполнен в виде двух шарнирно соединенных между собой короткими полками Г-образных элементов - проксимального и дистального, при этом высота Г-образных элементов зависит от длины окружности предплечья в области локтевого сгиба человека, длинная полка Г-образного проксимального элемента локтевого шарнира поперечно и жестко соединена с дистальным узлом модуля плеча, а проксимальный узел модуля предплечья соединен с длинной полкой Г-образного дистального элемента локтевого шарнира с возможностью вращения вокруг оси, расположенной вдоль модуля предплечья, зацепы для крепления концов упругих элементов закреплены на наружных поверхностях на опоре для крепления внешнего каркаса, элементе плеча, проксимальном и дистальном узлах модуля плеча, проксимальном и дистальном узлах модуля предплечья, проксимальном и дистальном элементах локтевого шарнира.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2016109511A RU2629738C1 (ru) | 2016-03-16 | 2016-03-16 | Экзоскелет верхних конечностей |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2016109511A RU2629738C1 (ru) | 2016-03-16 | 2016-03-16 | Экзоскелет верхних конечностей |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2629738C1 true RU2629738C1 (ru) | 2017-08-31 |
Family
ID=59797624
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2016109511A RU2629738C1 (ru) | 2016-03-16 | 2016-03-16 | Экзоскелет верхних конечностей |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2629738C1 (ru) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU186619U1 (ru) * | 2018-10-26 | 2019-01-24 | Общество с ограниченной ответственностью "Нейроботикс" | Модуль большого пальца экзоскелета кисти руки |
| RU2687897C1 (ru) * | 2018-03-26 | 2019-05-16 | Александр Александрович Воробьёв | Экзоскелет эндохирурга |
| RU2727231C1 (ru) * | 2019-12-25 | 2020-07-21 | Александр Александрович Воробьёв | Экзоскелет нейрохирурга |
| RU202453U1 (ru) * | 2020-06-11 | 2021-02-18 | Общество с ограниченной ответственностью "Экзомед" | Пассивный экзоскелет верхних конечностей |
| RU2793174C1 (ru) * | 2021-12-28 | 2023-03-29 | Общество с ограниченной ответственностью "Экзомед" | Промышленный экзоскелет для верхних и нижних конечностей |
| CN117919058A (zh) * | 2024-03-25 | 2024-04-26 | 中国科学院长春光学精密机械与物理研究所 | 柔性上肢外骨骼康复训练系统 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030023195A1 (en) * | 2001-07-30 | 2003-01-30 | Tariq Rahman | Orthosis device |
| US20030223844A1 (en) * | 2002-05-22 | 2003-12-04 | Organisation Intergouvernementale Dite Agence Spatiale Europeenne | Exoskeleton for the human arm, in particular for space applications |
| RU66671U1 (ru) * | 2007-04-03 | 2007-09-27 | Федеральное государственное учреждение "Санкт-Петербургский научно-практический центр медико-социальной экспертизы, протезирования и реабилитации инвалидов им. Г.А. Альбрехта Федерального агентства по здравоохранению и социальному развитию" (ФГУ "СПбНЦЭР им. Альбрехта Росздрава") | Ортопедический аппарат на верхнюю конечность (экзоскелетон) после межлопаточно-грудной резекции |
| CN200984250Y (zh) * | 2006-11-24 | 2007-12-05 | 浙江大学 | 一种基于气动肌肉的柔性外骨骼肘关节 |
| RU89375U1 (ru) * | 2009-04-29 | 2009-12-10 | Федеральное государственное учреждение "Санкт-Петербургский научно-практический центр медико-социальной экспертизы, протезирования и реабилитации инвалидов им. Г.А. Альбрехта Федерального агентства по здравоохранению и социальному развитию" (ФГУ "СПбНЦЭР им. Альбрехта Росздрава") | Ортопедический аппарат (экзоскелетон) на верхнюю конечность после межлопаточно-грудной резекции |
| US7862524B2 (en) * | 2006-03-23 | 2011-01-04 | Carignan Craig R | Portable arm exoskeleton for shoulder rehabilitation |
| US20110164949A1 (en) * | 2010-01-06 | 2011-07-07 | Samsung Electronics Co., Ltd. | Compact exoskeleton arm support device to compensate for gravity |
| EP2567636A1 (en) * | 2011-09-08 | 2013-03-13 | Focal Meditech B.V. | Arm support |
| WO2015099858A2 (en) * | 2013-09-30 | 2015-07-02 | Board Of Regents, The University Of Texas System | Upper-body robotic exoskeleton |
-
2016
- 2016-03-16 RU RU2016109511A patent/RU2629738C1/ru active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030023195A1 (en) * | 2001-07-30 | 2003-01-30 | Tariq Rahman | Orthosis device |
| US20030223844A1 (en) * | 2002-05-22 | 2003-12-04 | Organisation Intergouvernementale Dite Agence Spatiale Europeenne | Exoskeleton for the human arm, in particular for space applications |
| US7862524B2 (en) * | 2006-03-23 | 2011-01-04 | Carignan Craig R | Portable arm exoskeleton for shoulder rehabilitation |
| CN200984250Y (zh) * | 2006-11-24 | 2007-12-05 | 浙江大学 | 一种基于气动肌肉的柔性外骨骼肘关节 |
| RU66671U1 (ru) * | 2007-04-03 | 2007-09-27 | Федеральное государственное учреждение "Санкт-Петербургский научно-практический центр медико-социальной экспертизы, протезирования и реабилитации инвалидов им. Г.А. Альбрехта Федерального агентства по здравоохранению и социальному развитию" (ФГУ "СПбНЦЭР им. Альбрехта Росздрава") | Ортопедический аппарат на верхнюю конечность (экзоскелетон) после межлопаточно-грудной резекции |
| RU89375U1 (ru) * | 2009-04-29 | 2009-12-10 | Федеральное государственное учреждение "Санкт-Петербургский научно-практический центр медико-социальной экспертизы, протезирования и реабилитации инвалидов им. Г.А. Альбрехта Федерального агентства по здравоохранению и социальному развитию" (ФГУ "СПбНЦЭР им. Альбрехта Росздрава") | Ортопедический аппарат (экзоскелетон) на верхнюю конечность после межлопаточно-грудной резекции |
| US20110164949A1 (en) * | 2010-01-06 | 2011-07-07 | Samsung Electronics Co., Ltd. | Compact exoskeleton arm support device to compensate for gravity |
| EP2567636A1 (en) * | 2011-09-08 | 2013-03-13 | Focal Meditech B.V. | Arm support |
| WO2015099858A2 (en) * | 2013-09-30 | 2015-07-02 | Board Of Regents, The University Of Texas System | Upper-body robotic exoskeleton |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2687897C1 (ru) * | 2018-03-26 | 2019-05-16 | Александр Александрович Воробьёв | Экзоскелет эндохирурга |
| RU186619U1 (ru) * | 2018-10-26 | 2019-01-24 | Общество с ограниченной ответственностью "Нейроботикс" | Модуль большого пальца экзоскелета кисти руки |
| RU2727231C1 (ru) * | 2019-12-25 | 2020-07-21 | Александр Александрович Воробьёв | Экзоскелет нейрохирурга |
| RU202453U1 (ru) * | 2020-06-11 | 2021-02-18 | Общество с ограниченной ответственностью "Экзомед" | Пассивный экзоскелет верхних конечностей |
| RU2793174C1 (ru) * | 2021-12-28 | 2023-03-29 | Общество с ограниченной ответственностью "Экзомед" | Промышленный экзоскелет для верхних и нижних конечностей |
| CN117919058A (zh) * | 2024-03-25 | 2024-04-26 | 中国科学院长春光学精密机械与物理研究所 | 柔性上肢外骨骼康复训练系统 |
| CN117919058B (zh) * | 2024-03-25 | 2024-05-31 | 中国科学院长春光学精密机械与物理研究所 | 柔性上肢外骨骼康复训练系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2629738C1 (ru) | Экзоскелет верхних конечностей | |
| Bartenbach et al. | A lower limb exoskeleton research platform to investigate human-robot interaction | |
| JP2015536198A (ja) | 頸部固定器 | |
| RU2687573C2 (ru) | Голеностопное звено ортеза или экзоскелета | |
| US11517465B2 (en) | Upper extremity braces | |
| US20190059733A1 (en) | Tremor reduction device | |
| US20200188223A1 (en) | Tremor reduction device | |
| RU2665386C1 (ru) | Пассивный реабилитационный экзоскелет | |
| EA033877B1 (ru) | Многофункциональная больничная кровать для реабилитации, трансформируемая в вертикализатор | |
| EP3954343A1 (en) | Upper extremity braces | |
| Rahman et al. | Robotics, assistive technology, and occupational therapy management to improve upper limb function in pediatric neuromuscular diseases | |
| Georgarakis et al. | Supporting and stabilizing the scapulohumeral rhythm with a body-or robot-powered orthosis | |
| SU725666A1 (ru) | Аппарат дл механотерапии нижней конечности | |
| RU2635760C1 (ru) | Голенное звено ортеза или экзоскелета | |
| Wee et al. | Elbow flexion assist orthosis for arthrogryposis | |
| US20200368057A1 (en) | Upper Extremity Braces | |
| Kaurkin et al. | The friendly movements of the shoulder joints and trunk in healthy subjects | |
| CN209347557U (zh) | 脑瘫患儿家用简易便携康复训练背包 | |
| CN209770377U (zh) | 一种膝关节本体感觉与活动度训练器 | |
| RU179661U1 (ru) | Тренажер для восстановления функциональной активности верхних и нижних конечностей | |
| RU89375U1 (ru) | Ортопедический аппарат (экзоскелетон) на верхнюю конечность после межлопаточно-грудной резекции | |
| CN107028612B (zh) | 一种医用腰椎负荷背带装置 | |
| RU2766754C1 (ru) | Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | |
| RU182113U1 (ru) | Тренажер для увеличения силы и объёма движений в суставах верхних конечностей | |
| RU2687897C1 (ru) | Экзоскелет эндохирурга |