RU2429503C2 - Запросный способ измерения радиальной скорости - Google Patents
Запросный способ измерения радиальной скорости Download PDFInfo
- Publication number
- RU2429503C2 RU2429503C2 RU2009134883/09A RU2009134883A RU2429503C2 RU 2429503 C2 RU2429503 C2 RU 2429503C2 RU 2009134883/09 A RU2009134883/09 A RU 2009134883/09A RU 2009134883 A RU2009134883 A RU 2009134883A RU 2429503 C2 RU2429503 C2 RU 2429503C2
- Authority
- RU
- Russia
- Prior art keywords
- frequency
- voltage
- output
- phase
- input
- Prior art date
Links
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Предлагаемый способ относится к радиолокационной технике и может использоваться для обеспечения безопасности полетов летательных аппаратов, для контроля за сближением и стыковкой космических аппаратов (КА). Достигаемый технический результат изобретения - расширение функциональных возможностей способа путем присвоения объектам идентификационных номеров. Указанный результат достигается путем формирования сложного сигнала с двойной фазовой манипуляцией, соответствующей обработки сигнала и выделения низкочастотного напряжения, пропорционального идентификационному номеру объекта. 3 ил.
Description
Изобретение относится к радиолокационной технике и может использоваться для обеспечения безопасности полетов летательных аппаратов, для контроля за сближением и стыковкой космических аппаратов (КА).
Известны способы и системы измерения радиальной скорости подвижных объектов (авт. свид. СССР №№293.175, 926.611, 1.300.531; патенты РФ №№2.111.505, 2.124.760, 2.126.797, 2.131.622, 2.134.910, 2.150.752, 2.309.431; патенты США №№3.714.654, 4.400.780, 4.825.213, 4.495.580; патент Великобритании №2.232.316; патент Франции №2.037.222; патент Германии №1.917.140; патенты ЕР №№0.283.723, 0.707.220; Анодина Т.Г. и др. Автоматизация управления воздушным движением. - М.: Транспорт, 1992, с.145-147 и другие).
Из известных способов и систем наиболее близкими к предлагаемым являются «Запросный способ измерения радиальной скорости и система для его осуществления» (патент РФ №2.309.431 G01S 13/78, 2006), которые и выбраны в качестве базовых объектов.
Известный способ основан на излучении запросного сигнала и ретранслировании его. Для выделения доплеровской частоты ретранслированный сигнал сравнивается по частоте с запросным. Развязка запросного и ретранслированного сигналов достигается разносом по частоте.
Система, реализующая известный способ, состоит из двух объектов, каждый из которых содержит блок запроса и ретранслятор. Один или оба объекта могут быть подвижными.
Однако у взаимодействующих объектов отсутствуют идентификационные номера, что снижает эффективность их взаимодействия.
Технической задачей изобретения является расширение функциональных возможностей способа и системы путем присвоения объектам идентификационных номеров.
Поставленная задача решается тем, что запросный способ измерения радиальной скорости объектов и расстояния между ними, заключающийся, в соответствии с ближайшим аналогом, в использовании двух объектов, причем каждый объект снабжен блоком запроса и ретранслятором, кроме того, один или оба объекта могут быть подвижными, на каждом объекте запросный сигнал на частоте ωс манипулируют по фазе на +180° псевдослучайной последовательностью максимальной длительности, формируют тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωс+ωг1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, улавливают ретранслятором другого объекта, усиливают по мощности, преобразуют по частоте с использованием частоты ωг3 третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпр2=ωпр1-ωг3=ω2, усиливают его по мощности, излучают в эфир на частоте ω2=ωпр2, улавливают блоком запроса другого объекта, усиливают по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3±Ωq=ωг2-ω2, умножают и делят его по фазе на два, выделяют гармоническое колебание на частоте ωпр3±Ωq, сравнивают его по частоте с запросным сигналом на частоте ωс, выделяют доплеровскую частоту ±Ωq и по величине и знаку доплеровской частоты определяют величину и направление радиальной скорости, одновременно сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через блок регулируемой задержки, перемножают его с напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию на максимальном уровне, фиксируют временную задержку τ3 между запросным и ретранслированным сигналами и по ее значению определяют расстояние между объектами, отличается от ближайшего аналога тем, что напряжение второй промежуточной частоты ωпр2 перед усилением его по мощности манипулируют по фазе на 180° модулирующим кодом, соответствующим идентификационному номеру объекта, формируя тем самым сложный сигнал с двойной фазовой манипуляцией, напряжение третьей промежуточной частоты ωпр3±Ωq перемножают со сложным сигналом с фазовой манипуляцией на частоте ωс, прошедшим через блок регулируемой задержки, выделяют сложный сигнал с фазовой манипуляцией на доплеровской частоте, перемножают его с гармоническим напряжением доплеровской частоты ±Ωq, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру другого объекта, регистрируют и анализируют его.
Поставленная задача решается тем, что система для измерения радиальной скорости объектов и расстояния между ними, содержащая, в соответствии с ближайшим аналогом, размещенные на каждом объекте блок запроса, включающий последовательно включенные задающий генератор, первый фазовый манипулятор, второй вход которого соединен с выходом регистра сдвига, первый смеситель, второй вход которого соединен с выходом первого гетеродина, усилитель первой промежуточной частоты, первый усилитель мощности, первый дуплексер, вход-выход которого связан с первой приемопередающей антенной, второй усилитель мощности, второй смеситель, второй вход которого соединен с выходом второго гетеродина, усилитель третьей промежуточной частоты, удвоитель фазы, делитель фазы на два, первый узкополосный фильтр, четвертый смеситель, второй вход которого соединен с выходом задающего генератора, второй узкополосный фильтр и измеритель доплеровской частоты, последовательно подключенные к выходу усилителя третьей промежуточной частоты первый перемножитель, второй вход которого через блок регулируемой задержки соединен с выходом первого фазового манипулятора, первый фильтр нижних частот и экстремальный регулятор, выход которого соединен с вторым вводом блока регулируемой задержки, к второму выходу которого подключен индикатор дальности, и ретранслятор, включающий последовательно включенные четвертый усилитель мощности, второй дуплексер, вход-выход которого связан с второй приемопередающей антенной, третий усилитель мощности, третий смеситель, второй вход которого соединен с выходом третьего гетеродина, и усилитель второй промежуточной частоты, отличается от ближайшего аналога тем, что она снабжена в блоке запроса вторым и третьим перемножителями, полосовым фильтром, вторым фильтром нижних частот и блоком регистрации, причем к выходу усилителя третьей промежуточной частоты последовательно подключены второй перемножитель, второй вход которого соединен с первым выходом блока регулируемой задержки, полосовой фильтр, третий перемножитель, второй вход которого соединен с выходом второго узкополосного фильтра, второй фильтр нижних частот и блок регистрации, на ретрансляторе система снабжена генератором модулирующего кода и вторым фазовым манипулятором, причем к выходу усилителя второй промежуточной частоты подключен второй фазовый манипулятор, второй вход которого соединен с выходом генератора модулирующего кода, а выход подключен к входу четвертого усилителя мощности.
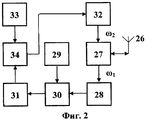
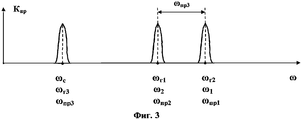
Система, реализующая предлагаемый способ, содержит два объекта. Структурная схема первого объекта (блока запроса) представлена на фиг.1. Структурная схема второго объекта (ретранслятора) представлена на фиг.2. Частотная диаграмма, иллюстрирующая преобразование сигналов, показана на фиг.3.
Первый объект (блок запроса) содержит последовательно включенные задающий генератор 1, фазовый манипулятор 3, второй вход которого соединен с выходом регистра 2 сдвига, первый смеситель 5, второй вход которого соединен с выходом первого гетеродина 4, усилитель 6 первой промежуточной частоты, первый усилитель 7 мощности, первый дуплексер 8, вход-выход которого связан с первой приемопередающей антенной 9, второй усилитель 10 мощности, второй смеситель 12, второй вход которого соединен с выходом второго гетеродина 11, усилитель 13 третьей промежуточной частоты, удвоитель 14 фазы, делитель 15 фазы на два, первый узкополосный фильтр 16, четвертый смеситель 17, второй вход которого соединен с выходом задающего генератора 1, второй узкополосный фильтр 18 и измеритель 19 частоты Доплера, последовательно подключенные к выходу усилителя 13 третьей промежуточной частоты, перемножитель 21, фильтр 22 нижних частот, экстремальный регулятор 23 и блок 24 регулируемой задержки, второй вход которого соединен с выходом фазового манипулятора 3, первый выход соединен со вторым входом перемножителя 21, а второй выход подключен к индикатору 25 дальности. Перемножитель 21, фильтр 22 нижних частот, экстремальный регулятор 23 и блок 24 регулируемой задержки образуют коррелятор 20.
К выходу усилителя 13 третьей промежуточной частоты последовательно подключены второй перемножитель 35, второй вход которого соединен с первым выходом блока 24 регулируемой задержки, полосовой фильтр 36, третий перемножитель 37, второй вход которого соединен с выходом второго узкополосного фильтра 18, второй фильтр 38 нижних частот и блок 39 регистрации.
Второй объект (ретранслятор) содержит последовательно включенные четвертый усилитель 32 мощности, второй дуплексер 27, вход-выход которого связан с второй приемопередающей антенной 26, третий усилитель 28 мощности, третий смеситель 30, второй вход которого соединен с выходом третьего гетеродина 29, усилитель 31 второй промежуточной частоты и второй фазовый манипулятор 34, второй вход которого соединен с выходом генератора 33 модулирующего кода, а выход подключен к входу четвертого усилителя 32 мощности. Каждый объект снабжен блоком запроса и ретранслятором. Один или оба объекта могут быть подвижными.
Предлагаемый способ реализуется системой, которая работает следующим образом.
На первом объекте с помощью задающего генератора 1 формируется высокочастотное колебание:
Uc(t)=Vc·cos(ωс·t+φс), 0≤t≤Tc,
где Vc, ωс, φс, Tс - амплитуда, несущая частота, начальная фаза и длительность высокочастотного колебания, которое поступает на первый вход фазового манипулятора 3. На второй вход последнего подается псевдослучайная последовательность (ПСП) M(t) максимальной длительности с выхода регистра 2 сдвига, охваченного логической обратной связью. Обратная связь осуществляется путем сложения по модулю двух выходных напряжений двух или более каскадов и подачи результирующего напряжения на вход первого каскада. Период повторения (длительность) такой кодовой последовательности:
m=2n-1,
где n - число каскадов регистра сдвига.
На выходе фазового манипулятора 3 образуется сложный сигнал с фазовой манипуляцией (ФМн):
U'c(t)=Vc·cos[ωс·t+φк(t)+φc], 0≤t≤Tc,
где φк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с псевдослучайной последовательностью M(t), причем φк(t)=const при k·τэ<t<(k+1)·τэ и может изменяться скачком при t=k·τэ, т.е. на границах между элементарными посылками (k=1,2,…N);
τэ, N - длительность и количество элементарных посылок, из которых составлен сигнал длительностью Тс(Тс=τ3·N).
Этот сигнал поступает на первый вход первого смесителя 5, на второй вход которого подается напряжение первого гетеродина 4:
Uг1(t)=Vг1·cos(ωг1·t+φг1).
На выходе смесителя 5 образуются напряжения комбинационных частот. Усилителем 6 выделяется напряжение первой промежуточной (суммарной) частоты:
Uпр1(t)=Vпр1·cos[ωпр1·t+φк(t)+φпр1], 0≤t≤Tc,
где Vпр1=1/2K1·Vc·Vг1;
K1 - коэффициент передачи смесителя;
ωпр1=ωс+ωг1=ω1 - первая промежуточная (суммарная) частота;
φпр1=φc+φг1,
которое после усиления в первом усилителе 7 мощности через дуплексер 8 поступает в приемопередающую антенну 9, излучается ею в эфир на частоте ω1, улавливается приемопередающей антенной 26 второго объекта и через дуплексер 27 и усилитель 28 мощности поступает на первый вход третьего смесителя 30, на второй вход которого подается напряжение третьего гетеродина 29:
Uг3(t)=Vг3·cos(ωг3·t+φг3).
На выходе смесителя 30 образуются напряжения комбинационных частот. Усилителем 31 выделяется напряжение второй промежуточной частоты:
Uпр2(t)=Vпр2·cos[ωпр2·t+φк(t)+φпр2], 0≤t≤Tc,
где Vпр2=1/2K1·Vпр1·Vг3;
ωпр2=ωпр1-ωг3=ω2 - вторая промежуточная (разностная) частота;
φпр2=φпр1-φг3,
которое поступает на первый вход второго фазового манипулятора 34, а на второй вход фазового манипулятора 34 подается модулирующий код M1(t) с выхода генератора 33 модулирующего кода. Модулирующий код M1(t) является идентификационным номером объекта. На выходе фазового манипулятора 34 формируется сложный сигнал с двойной фазовой манипуляцией:
U'пр2(t)=Vпр2·cos[ωпр2·t+φк(t)+φк1(t)+φпр2], 0≤t≤Tc,
где φк(t)={0,π} - манипулируемая составляющая фазы, отображающая закон фазовой манипуляции в соответствии с модулирующим кодом M(t), который после усиления в четвертом усилителе 32 мощности через дуплексер 27 поступает в приемопередающую антенну 26 и излучается ею в эфир на частотах ω2, улавливается приемопередающей антенной 9 первого объекта и через дуплексер 8 и усилитель 10 мощности поступает на первый вход второго смесителя 12, на второй вход которого подается напряжение второго гетеродина 11:
Uг2(t)=Vг2·cos(ωг2·t+φг2).
На выходе смесителя 12 образуются напряжения комбинационных частот. Усилителем 13 выделяется напряжение третьей промежуточной (разностной) частоты:
Uпр3(t)=Vпр3·cos[(ωпр3·±Ωд)(t-τ3)-φk(t-τ3)-φk1(t-τ3/2)+φпр3], 0≤t≤Tc,
где Vпр3=1/2K1·Vпр2·Vг2;
ωпр3=ωг2-ωпр2=ωc - третья промежуточная (разностная) частота;
φпр3=φг2-φпр2;
τ3=2R/C - время запаздывания ретранслированного сигнала относительно запросного;
R - расстояние между объектами;
C - скорость распространения радиоволн;
±Ωд - доплеровское смещение частоты,
которое поступает на вход удвоителя 14 фазы. В качестве последнего может использоваться перемножитель, на два входа которого подается одно и то же напряжение.
На выходе удвоителя 14 фазы образуется гармоническое колебание:
U2(t)=V2·cos[2(ωпр3±Ωд)(t-τ3)+2φпр3], 0≤t≤Tc,
где V2=1/2K2·V2 пр3;
K2 - коэффициент передачи перемножителя,
в котором фазовая манипуляция уже отсутствует, так как 2φк(t-τ3)={0, 2π},
2φк1(t-τ3/2)={0,2π}.
Это колебание поступает на вход делителя 15 фазы на два, на выходе которого образуется гармоническое колебание:
U3(t)=V3·cos[(ωпр3±Ωд)(t-τ3)+φпр3],
которое выделяется узкополосным фильтром 16 и поступает на первый вход четвертого смесителя 17. На выходе смесителя 17 образуются напряжения комбинационных частот. Узкополосным фильтром 18 выделяется напряжение доплеровской частоты:
U4(t)=V4·cos(±Ωд·t+φ4), 0≤t≤Tc,
где V4=1/2K1·Vc·V3;
φ4=φс-φпр3-ωпр3·τ3,
которое поступает на вход измерителя 19 доплеровской частоты, который обеспечивает измерение доплеровской частоты ±Ωд. Причем величина и знак доплеровской частоты определяют величину и направление радиальной скорости.
Одновременно напряжение третьей промежуточной частоты Uпр3(t) с выхода усилителя 13 поступает на вход первого перемножителя 21, на второй вход которого подается сложный ФМн-сигнал U'1(t) с выхода фазового манипулятора 3 через блок 24 регулируемой задержки. Полученное на выходе перемножителя 21 напряжение пропускается через фильтр 22 нижних частот, на выходе которого формируется корреляционная функция R(τ). Экстремальный регулятор 23, предназначенный для поддержания максимального значения корреляционной функции R(τ) и подключенный к выходу фильтра 22 нижних частот, воздействует на управляющий вход блока 24 регулируемой задержки и поддерживает вводимую им задержку τ, равной τ3·(τ=τ3), что соответствует максимальному значению корреляционной функции R(τ). Указатель 25 дальности, связанный со шкалой блока 24 регулируемой задержки, позволяет непосредственно считывать измеренное значение расстояния R между объектами:
R=с·τ3/2.
Следовательно, задача измерения дальности (расстояния) R сводится к измерению временной задержки τ3 ретранслированного сигнала относительно запросного.
Одновременно напряжение Uпр3(t) третьей промежуточной частоты с выхода усилителя 13 поступает на первый вход второго перемножителя 35, на второй вход которого подается напряжение:
U5(t)=Vc·cos[ωc(t-τ3)+φк(t-τ3)+φс],
с первого выхода блока 24 регулируемой задержки. На выходе перемножителя 35 образуется напряжение:
U6(t)=V6·cos[±Ω(t-τ3)+φк1(t-τ3/2)+φ4], 0≤t≤Tc,
где U6=1/2K2·Vпр3·Vс,
которое представляет собой ФМн-сигнал на доплеровской частоте, выделяется полосовым фильтром 36 и поступает на первый вход перемножителя 37. На второй ход последнего подается напряжение U4(t) с выхода узкополосного фильтра 18. На выходе перемножителя 37 образуется низкочастотное напряжение:
Uн(t)=Vн·cosφк1(t-τ3/2)+φ4], 0≤t≤Tc,
где Vн=1/2K2·V4·V6,
пропорциональное идентификационному номеру объекта, которое выделяется фильтром 38 нижних частот и регистрируется блоком 39 регистрации.
Таким образом, предлагаемые способ и система по сравнению с прототипами обеспечивают определение идентификационных номеров взаимодействующих объектов, что повышает эффективность их взаимодействия.
Тем самым функциональные возможности способа и системы расширены.
Claims (1)
- Запросный способ определения радиальной скорости объектов и расстояния между ними, заключающийся в использовании двух объектов, причем каждый объект снабжен блоком запроса и ретранслятором, кроме того, один или оба объекта могут быть подвижными, на каждом объекте запросный сигнал на частоте ωс манипулируют по фазе на 180° псевдослучайной последовательностью максимальной длительности, формируют тем самым сложный сигнал с фазовой манипуляцией, преобразуют его по частоте с использованием частоты ωг1 первого гетеродина, выделяют напряжение первой промежуточной частоты ωпр1=ωc+ωг1=ω1, усиливают его по мощности, излучают в эфир на частоте ω1=ωпр1, улавливают ретранслятором другого объекта, усиливают по мощности, преобразуют по частоте с использованием частоты ωг3 третьего гетеродина, выделяют напряжение второй промежуточной частоты ωпp2=ωпp1-ωг3=ω2, усиливают его по мощности, излучают в эфир на частоте ω2=ωпр2, усиливают по мощности, преобразуют по частоте с использованием частоты ωг2 второго гетеродина, выделяют напряжение третьей промежуточной частоты ωпр3±Ωq=ωг2-ω2, умножают и делят его по фазе на два, выделяют гармоническое колебание на частоте ωпр3±Ωg, сравнивают его по частоте с запросным сигналом на частоте ωс, выделяют доплеровскую частоту ±Ωg и по величине и знаку доплеровской частоты определяют величину и направление радиальной скорости, одновременно сложный сигнал с фазовой манипуляцией на частоте ωс пропускают через блок регулируемой задержки, перемножают его с напряжением третьей промежуточной частоты, выделяют низкочастотное напряжение, формируя тем самым корреляционную функцию R(τ), где τ - текущая временная задержка, изменением задержки τ поддерживают корреляционную функцию на максимальном уровне, фиксируют временную задержку τ3 между запросным и ретранслированным сигналами и по ее значению определяют расстояние между объектами, отличающийся тем, что напряжение второй промежуточной частоты ωпр3 перед усилением его по мощности манипулируют по фазе на 180° модулирующим кодом, соответствующим идентификационному номеру объекта, формируют тем самым сложный сигнал с двойной фазовой манипуляцией, напряжение третьей промежуточной частоты ωпр3±Ωg перемножают со сложным сигналом с фазовой манипуляцией на частоте ωс, прошедшим через блок регулируемой задержки, выделяют сложный сигнал с фазовой манипуляцией на доплеровской частоте, перемножают его с гармоническим напряжением доплеровской частоты ±Ωg, выделяют низкочастотное напряжение, пропорциональное идентификационному номеру другого объекта, регистрируют и анализируют его.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2009134883/09A RU2429503C2 (ru) | 2009-09-09 | 2009-09-09 | Запросный способ измерения радиальной скорости |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2009134883/09A RU2429503C2 (ru) | 2009-09-09 | 2009-09-09 | Запросный способ измерения радиальной скорости |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2009134883A RU2009134883A (ru) | 2011-03-20 |
| RU2429503C2 true RU2429503C2 (ru) | 2011-09-20 |
Family
ID=44053490
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2009134883/09A RU2429503C2 (ru) | 2009-09-09 | 2009-09-09 | Запросный способ измерения радиальной скорости |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2429503C2 (ru) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2518174C2 (ru) * | 2012-07-02 | 2014-06-10 | Федеральное государственное бюджетное учреждение науки Институт прикладной астрономии Российской академии наук | Запросный способ измерения радиальной скорости и местоположения спутника глобальной навигационной системы глонасс и система для его осуществления |
| RU2529867C2 (ru) * | 2013-01-10 | 2014-10-10 | Федеральное государственное бюджетное учреждение "Арктический и антарктический научно-исследовательский институт" | Способ управления движением судов |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5223839A (en) * | 1966-06-23 | 1993-06-29 | The United States Of America As Represented By The Secretary Of The Army | Radar identification |
| US5745575A (en) * | 1996-05-20 | 1998-04-28 | The United States Of America As Represented By The Secretary Of The Army | Identification-friend-or-foe (IFF) system using variable codes |
| RU2138062C1 (ru) * | 1992-06-30 | 1999-09-20 | Томсон-ЦСФ | Способ и устройство для фильтрации ответов радиолокационных приемоответчиков |
| US5973613A (en) * | 1990-06-15 | 1999-10-26 | Raytheon Company | Personal messaging system and method |
| RU2245596C1 (ru) * | 2003-07-15 | 2005-01-27 | Федеральное государственное унитарное предприятие "Научно-исследовательский и проектно-технологический институт электроугольных изделий" | Способ изготовления композиции для щеток электрических машин |
| RU2278047C1 (ru) * | 2004-12-15 | 2006-06-20 | Виктор Иванович Дикарев | Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта |
| RU2278048C1 (ru) * | 2004-11-05 | 2006-06-20 | Виктор Иванович Дикарев | Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта |
| RU2297045C1 (ru) * | 2005-08-17 | 2007-04-10 | Виктор Иванович Дикарев | Система опознавания автотранспорта |
| RU2309431C1 (ru) * | 2006-02-16 | 2007-10-27 | Вячеслав Адамович Заренков | Запросный способ измерения радиальной скорости и система для его осуществления |
-
2009
- 2009-09-09 RU RU2009134883/09A patent/RU2429503C2/ru not_active IP Right Cessation
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5223839A (en) * | 1966-06-23 | 1993-06-29 | The United States Of America As Represented By The Secretary Of The Army | Radar identification |
| US5973613A (en) * | 1990-06-15 | 1999-10-26 | Raytheon Company | Personal messaging system and method |
| RU2138062C1 (ru) * | 1992-06-30 | 1999-09-20 | Томсон-ЦСФ | Способ и устройство для фильтрации ответов радиолокационных приемоответчиков |
| US5745575A (en) * | 1996-05-20 | 1998-04-28 | The United States Of America As Represented By The Secretary Of The Army | Identification-friend-or-foe (IFF) system using variable codes |
| RU2245596C1 (ru) * | 2003-07-15 | 2005-01-27 | Федеральное государственное унитарное предприятие "Научно-исследовательский и проектно-технологический институт электроугольных изделий" | Способ изготовления композиции для щеток электрических машин |
| RU2278048C1 (ru) * | 2004-11-05 | 2006-06-20 | Виктор Иванович Дикарев | Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта |
| RU2278047C1 (ru) * | 2004-12-15 | 2006-06-20 | Виктор Иванович Дикарев | Способ совмещенной радиосвязи и радионавигации и устройство, его реализующее, для железнодорожного транспорта |
| RU2297045C1 (ru) * | 2005-08-17 | 2007-04-10 | Виктор Иванович Дикарев | Система опознавания автотранспорта |
| RU2309431C1 (ru) * | 2006-02-16 | 2007-10-27 | Вячеслав Адамович Заренков | Запросный способ измерения радиальной скорости и система для его осуществления |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2518174C2 (ru) * | 2012-07-02 | 2014-06-10 | Федеральное государственное бюджетное учреждение науки Институт прикладной астрономии Российской академии наук | Запросный способ измерения радиальной скорости и местоположения спутника глобальной навигационной системы глонасс и система для его осуществления |
| RU2529867C2 (ru) * | 2013-01-10 | 2014-10-10 | Федеральное государственное бюджетное учреждение "Арктический и антарктический научно-исследовательский институт" | Способ управления движением судов |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2009134883A (ru) | 2011-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114706063A (zh) | 雷达系统中的方法、雷达系统或雷达系统的装置 | |
| EP2788788B1 (en) | Method of determining distance and speed of fmcw radar terminals | |
| RU2429503C2 (ru) | Запросный способ измерения радиальной скорости | |
| RU2526401C1 (ru) | Способ радиотехнических доплеровских угломерных измерений космического аппарата и система для осуществления данного способа | |
| RU2389040C1 (ru) | Запросный способ измерения радиальной скорости и система для его осуществления | |
| RU2309431C1 (ru) | Запросный способ измерения радиальной скорости и система для его осуществления | |
| RU2518174C2 (ru) | Запросный способ измерения радиальной скорости и местоположения спутника глобальной навигационной системы глонасс и система для его осуществления | |
| RU2660160C1 (ru) | Способ определения параметров движения воздушного объекта динамической системой радиотехнического контроля | |
| RU2559813C1 (ru) | Способ определения местоположения объекта навигации | |
| Matsuda et al. | DDMA-MIMO observations with the MU radar: Validation by measuring a beam broadening effect | |
| JP2020139776A (ja) | Fmcw方式レーダ装置 | |
| RU2602274C1 (ru) | Радиолокационный способ и устройство для дистанционного измерения полного вектора скорости метеорологического объекта | |
| RU2411532C1 (ru) | Устройство для определения расстояния между воздушными судами | |
| RU2599984C1 (ru) | Разностно-дальномерный способ и наземно-космическая система измерения пространственных координат летательных аппаратов по сигналам радиоизлучения их бортового радиоэлектронного оборудования | |
| CN103376448A (zh) | 适于工作于多无线电测高设备中的无线电系统 | |
| JP7012903B2 (ja) | アンテナ装置及びレーダ装置 | |
| RU2427853C1 (ru) | Фазовый способ пеленгации и фазовый пеленгатор для его осуществления | |
| RU2560089C1 (ru) | Способ пассивной радиолокации | |
| RU2309424C1 (ru) | Устройство для определения расстояния между воздушными судами | |
| RU2402787C1 (ru) | Способ обнаружения терпящих бедствие | |
| RU2697257C1 (ru) | Способ функционирования радиолокационной системы при измерении скорости полёта беспилотного летательного аппарата малого класса типа мультикоптер и дальности до него | |
| RU2535487C1 (ru) | Способ измерения радиальной скорости объекта (варианты) | |
| RU2605205C2 (ru) | Устройство искажения радиолокационного изображения | |
| RU2587471C1 (ru) | Способ измерения расстояния между бортовой и наземной приёмопередающими станциями | |
| RU2302645C1 (ru) | Угломестно-временной доплеровский способ определения координат аварийного объекта |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20110910 |