RU2419787C2 - Система и способ контроля трубопроводов импульсными вихревыми токами - Google Patents
Система и способ контроля трубопроводов импульсными вихревыми токами Download PDFInfo
- Publication number
- RU2419787C2 RU2419787C2 RU2008126263/28A RU2008126263A RU2419787C2 RU 2419787 C2 RU2419787 C2 RU 2419787C2 RU 2008126263/28 A RU2008126263/28 A RU 2008126263/28A RU 2008126263 A RU2008126263 A RU 2008126263A RU 2419787 C2 RU2419787 C2 RU 2419787C2
- Authority
- RU
- Russia
- Prior art keywords
- sensors
- eddy current
- pipeline
- pulsed eddy
- many
- Prior art date
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
- G01N27/82—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws
- G01N27/90—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables for investigating the presence of flaws using eddy currents
- G01N27/9013—Arrangements for scanning
- G01N27/902—Arrangements for scanning by moving the sensors
Landscapes
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Investigating Or Analyzing Materials By The Use Of Magnetic Means (AREA)
Abstract
Изобретение относится к неразрушающему контролю трубопроводов. Система контроля трубопроводов импульсными вихревыми токами содержит множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием; и множество датчиков, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками в каждой из множества ступеней в растянутом состоянии, причем множество датчиков размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики импульсных вихревых токов, так, что обеспечен полный охват трубопровода датчиками импульсных вихревых токов. Технический результат - облегчение контроля внутренней поверхности трубопроводов, имеющих резкие повороты и вентили. 3 н. и 19 з.п. ф-лы, 7 ил.
Description
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к неразрушающему контролю трубопроводов и, в частности, к способу и устройству для контроля электропроводных структур с применением импульсных вихревых токов.
Трубопроводы широко используются в ряде отраслей промышленности для транспортировки больших количеств материалов из одного места в другое. Использование трубопроводов обеспечивает дешевизну и эффективность транспортировки ряда текучих сред типа нефти и/или газа. По трубопроводам может также осуществляться транспортировка порошкообразных материалов и других твердых частиц малого размера, суспендированных в жидкостях. Подземные и подводные (глубоководные) трубопроводы в основном используются для транспортировки огромных количеств продуктов переработки нефти и газа, имеющих важное значение для отраслей промышленности, связанных с поставками энергоресурсов, причем обычно такая транспортировка осуществляется под высоким давлением, при экстремальных температурах и при высоких скоростях потока.
По мере старения инфраструктуры трубопровода дефекты в составляющих его трубах могут вызывать ухудшение целостности трубопровода. Коррозия трубопровода может быть обусловлена небольшими слабыми участками, оседанием грунта, проектами локального строительства, сейсмической активностью, погодой и просто износом в процессе нормальной эксплуатации и может приводить к дефектам и аномалиям в трубопроводе. Таким образом, изъяны или дефекты и аномалии могут появляться на поверхности трубопровода в форме коррозии, механических повреждений, усталости, трещин, напряжений, коррозионных трещин, водородных растрескиваний или деформаций в виде вмятин или складок.
Эксплуатация и защита действующих трубопроводных сетей является сложной задачей. В существующих современных системах линейного контроля используют устройства, известные как приборы контроля трубопроводов (PIG), для прохождения секций трубы in situ и предоставления данных, которые могут быть подвергнуты оценке с целью определения структурных дефектов. В процессе прохождения внутри трубопровода такие PIGи собирают данные от многочисленных датчиков. Длина типичного единичного пробега PIGа может составлять более 100 км. Использование PIGа позволяет осуществлять оценку целостности секции трубопровода без дорогостоящего извлечения и удаления изоляции с целью получения доступа к внешней стенке и проводить неразрушающий контроль секции трубопровода.
Для сбора информации о трубопроводах в PIGах могут быть использованы датчики на основе широкого диапазона технологий. Примеры технологий, которые могут быть использованы, включают в себя рассеяние магнитного потока (MFL), ультразвук (UT) или вихревые токи (EC). Каждая из этих технологий имеет свои ограничения. Например, системы MFL основаны на постоянных магнитах с сильными полями, являющихся большими, тяжелыми и имеющих значительную силу сопротивления перемещению. В результате, PIGи с использованием технологии MFL подходят для контроля трубопроводов с относительно плавными изгибами. Способ с использованием UT предполагает механический контакт со стенками трубы и не подходит для газовых труб или загрязненных стенок. Существующие EC-PIGи обычно используются для контроля немагнитных металлических трубопроводов. Проблемой труб из углеродистой стали является обусловленная их магнитной проницаемостью относительно малая глубина проникновения вихревых токов, решение которой заключается в переходе на низкие частоты с использованием катушек большой индуктивности для обеспечения большой глубины проникновения и интеграции участков большой площади с целью предотвращения локальных изменений магнитной проницаемости. Необходимость большой глубины проникновения магнитного поля и интеграции участков большой площади делает EC-PIGи неподходящими для использования в условиях суженных трубопроводов, имеющих относительно остроугольные изгибы.
Для преодоления некоторых из вышеупомянутых проблем были разработаны технологии возбуждения EC автономным источником поля и в результате переходного процесса. Однако технологии возбуждения EC автономным источником поля и в результате переходного процесса не позволяют облегчить проведение контроля трубопроводов большого диаметра, изготовленных из толстой углеродистой стали, с высоким пространственным разрешением для обнаружения участков точечной коррозии с помощью перемещающегося PIGа. Так как в системах возбуждения EC автономным источником поля используется пространственное разделение возбуждающего и воспринимающего элементов, большие участки, расположенные рядом с резкими поворотами и вентилями, остаются не подвергнутыми контролю. Кроме того, технологии возбуждения EC автономным источником поля и в результате переходного процесса не обеспечивают снижения потребления энергии для автоматических PIGов. Все это позволяет сделать вывод о целесообразности создания PIGа, адаптированного к облегчению контроля внутренней поверхности трубопроводов, имеющих резкие повороты и вентили, с уменьшенным рабочим зазором.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В нескольких словах, в соответствии с одним типичным примером осуществления настоящего изобретения предложено устройство контроля трубопроводов импульсными вихревыми токами. Устройство контроля трубопроводов импульсными вихревыми токами содержит множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием, и множество датчиков, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками в каждой из множества ступеней в растянутом состоянии, причем множество датчиков размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики.
Раскрыт также способ оценки трубопровода. В типичном примере осуществления этот способ содержит этапы, на которых устройство измерения импульсных вихревых токов перемещают сквозь трубопровод, причем устройство измерения импульсных вихревых токов содержит множество ступеней, причем каждая из множества ступеней адаптирована к перемещению между сжатым состоянием, при котором множество датчиков размещено вокруг, по меньшей мере, участка окружности каждой из множества ступеней без зазора между ними, и растянутым состоянием, при котором между датчиками, установленными на каждой из множества ступеней, существует, по меньшей мере, один зазор и множество датчиков размещено так, что зазор между датчиками, размещенными вокруг первой одной из множества ступеней в растянутом состоянии совмещен с и смещен в продольном направлении от местоположения, по меньшей мере, некоторых из множества датчиков вокруг, по меньшей мере, второй одной из множества ступеней, и размещают устройство измерения импульсных вихревых токов в сжатом состоянии для прохождения через суженный участок трубопровода.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие признаки, особенности и преимущества настоящего изобретения станут более понятными после прочтения приводимого ниже подробного описания, сопровождаемого ссылками на прилагаемые чертежи, на которых одинаковые позиции обозначают одинаковые детали на всех чертежах, причем
фиг. 1 - блок-схема системы контроля трубопроводов согласно типичному примеру осуществления настоящего изобретения;
фиг. 2 - поперечное сечение прибора контроля трубопроводов (PIG) согласно типичному примеру осуществления настоящего изобретения;
фиг. 3 - схематичный вид многоступенчатого PIGа согласно типичному примеру осуществления настоящего изобретения;
фиг. 4 - схематичный вид сектора датчиков многоступенчатого PIGа согласно типичному примеру осуществления настоящего изобретения;
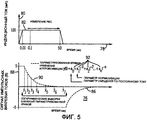
фиг. 5 - график сигналов импульсных вихревых токов (PEC), используемый для объяснения принципа действия PIGа согласно типичному примеру осуществления настоящего изобретения;
фиг. 6 - блок-схема, иллюстрирующая типичный пример осуществления электрической схемы, которая может быть использована для обработки данных, полученных с помощью PIGа согласно типичному примеру осуществления настоящего изобретения; и
фиг. 7 - блок-схема последовательности типичных этапов работы датчика PEC согласно типичному примеру осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
Типичные примеры осуществления настоящего изобретения касаются проверки эффективности трубопроводов. В частности, прибор контроля трубопроводов (PIG) содержит множество ступеней датчиков, каждая из которых содержит множество секторов датчиков. Для получения информации о возможных дефектах или ухудшении состояния стенок трубопровода от датчиков в PIGе используется технология импульсных вихревых токов (PEC). Как поясняется ниже, использование технологии PEC позволяет размещать датчики таким образом, что PIG может находиться как в сжатом состоянии, так и в растянутом состоянии. В сжатом состоянии PIG может проходить относительно остроугольные изгибы в трубопроводе.
На фиг. 1 представлен схематичный вид системы контроля трубопроводов, в целом обозначенной ссылочной позицией 10. Система 10 контроля трубопроводов, адаптированная к контролю трубопровода 12, содержит прибор 14 контроля трубопроводов (PIG). PIG 14 представляет собой сканирующее устройство, размещаемое в трубопроводе и используемое для сбора данных о состоянии стенок трубопровода 12. Данные могут быть подвергнуты анализу с целью определения потенциальных дефектов типа слабых мест и т.п. в стенках трубопровода. PIG 14 может перемещаться по длине трубопровода с потоком текучей среды в трубопроводе. В типичном примере осуществления, иллюстрированном на фиг. 1, для получения данных о состоянии стенок трубопровода 12 в PIGе 14 используются датчики или зонды импульсных вихревых токов (PEC).
PIG 14 содержит первую ступень 16 датчиков и вторую ступень 18 датчиков. Конструкция первой ступени 16 датчиков и второй ступени 18 датчиков такова, что каждая из них может находиться в растянутом состоянии и в сжатом состоянии. В сжатом состоянии первая ступень 16 датчиков и вторая ступень 18 датчиков могут иметь достаточно малый диаметр, чтобы обеспечить PIG 14 возможность прохождения относительно остроугольных изгибов внутри трубопровода 12 по сравнению с препятствиями, которые этот прибор может проходить при растянутом состоянии ступеней 16, 18 датчиков.
В примере осуществления, иллюстрированном на фиг. 1, PIG 14 дополнительно содержит позиционный компонент (POC) 20, который определяет положение и ориентацию PIG 14 в трубопроводе 12. Кроме того, PIG 14 включает в себя систему 22 сбора данных (DAS) для приема данных, собираемых первой ступенью 16 датчиков и второй ступенью 18 датчиков. Источник 24 питания (PS) обеспечивает подачу питания на первую ступень 16 датчиков, вторую ступень 18 датчиков, POC 20 и DAS 22, а также и на другие ассоциированные компоненты PIG 14. Специалистам в данной области техники очевидно, что PIG 14 может дополнительно содержать дополнительные компоненты типа встроенных часов для проставление метки времени на каждую запись, полученную с помощью DAS 22 или т.п. Точно так же система 10 контроля трубопроводов может включать в себя дополнительные компоненты, подобные магнитометрам или магнитным регистраторам, одометрам и внешним часам, предназначенным для записи положения и всего расстояния, пройденного прибором PIG 14.
Фиг. 2 - поперечное сечение PIGа 14, представленного на фиг. 1, проходящее через центральную ось 36 прибора. Чертеж в целом обозначен ссылочной позицией 26. Поперечное сечение, представленное на фиг. 2, иллюстрирует работу одной из ступеней датчиков, представленных на фиг. 1. В иллюстративных целях на фиг. 2 представлена первая ступень 16 датчиков (фиг. 1). Первая ступень 16 датчиков содержит множество секторов 28, 30, 32 и 34 датчиков. Секторы 28, 30, 32 и 34 датчиков, показанные на фиг. 2 штрихпунктирными линиями, находятся в сжатом состоянии. Позициями 128, 130, 132 и 134 обозначены соответственно те же самые секторы датчиков, находящиеся в растянутом положении относительно центральной оси 36.
Каждый из множества секторов 28, 30, 32 и 34 датчиков прикреплен к механизму 38 расширения, который может содержать пружину, гидравлическую систему или т.п., для перемещения соответствующего сектора датчиков между сжатым состоянием и растянутым состоянием. В сжатое положении диаметр PIGа 14 может составлять приблизительно 60-70% от его значения в растянутом состоянии. Перемещение ступеней 16, 18 датчиков в сжатое состояние позволяет PIGу 14 свободно проходить через относительно остроугольные изгибы или другие препятствия в трубопроводе 12.
Фиг. 3 - схематичный вид, демонстрирующий ступени 16, 18 датчиков многоступенчатого PIGа 14, представленного на фиг. 1. Чертеж в целом обозначен ссылочной позицией 40. Первая ступень 16 датчиков и вторая ступень 18 датчиков показаны на фиг. 3 штриховыми линиями. Первая ступень 16 датчиков содержит секторы 30, 32 и 34 датчиков. Каждый из секторов датчиков 30, 32 и 34 содержит множество датчиков 42, которые в данном документе могут также именоваться приемниками. Точно так же вторая ступень 18 датчиков содержит сектор 44 датчиков и сектор 46 датчиков. Каждый из секторов 44, 46 датчиков содержит множество приемников 42. В типичном примере осуществления датчики размещены на секторах датчиков первой ступени 16 датчиков и второй ступени 18 датчиков так, что в растянутом состоянии и первая ступень 16 датчиков, и вторая ступень 18 датчиков могут полностью охватывать трубопровод по окружности. Кроме того, положение секторов 44, 46 датчиков относительно секторов 30, 32 и 34 датчиков может быть таким, что при растянутом состоянии обеих ступеней датчиков секторы 44 и 46 датчиков второй ступени 18 датчиков будут охватывать участки окружности трубопровода, соответствующие зазорам между секторами 30, 32 и 34 датчиков первой ступени 16 датчиков. Следовательно, при растянутом состоянии ступеней 16, 18 датчиков может быть обеспечен полный охват трубопровода 12 по окружности.
Для получения данных о состоянии трубопровода 12 через посредство датчиков целесообразно, чтобы PIG 14 (фиг. 1) был адаптирован к использованию технологии возбуждения импульсных вихревых токов (PEC). В системе PEC используется направление сигналов PEC в сторону стенок трубопровода 12, а также прием и измерение отраженных сигналов. Технология PEC отличается от технологии возбуждения вихревых токов автономным источником поля. В системе возбуждения вихревых токов автономным источником поля возбуждение катушки возбуждения обеспечивается сигналом синусоидального тока. Для получения эффективных результатов катушка возбуждения должна быть физически отделена от датчиков относительно большим расстоянием, чтобы облегчить прием отраженного сигнала от трубопровода, подвергаемого проверке.
В отличие от этого в системе PEC входной сигнал синусоидальной формы замещается последовательностью импульсов тока возбуждения. Возбуждение катушки возбуждения осуществляется в течение длительности начального импульса. Затем предусмотрена стабилизация тока. Отраженные сигналы достигают датчиков в течение периода стабилизации. Это позволяет наблюдать относительно малые изменения, соответствующие потенциальному повреждению в трубопроводе 12. Кроме того, система PEC позволяет сделать PIG 14 более компактным, так как катушка возбуждения может быть размещена на более близком расстоянии от принимающих датчиков. В типичном примере осуществления катушка возбуждения может быть размещена рядом с одним или более из принимающих датчиков.
Для ясности на фиг. 3 представлены только три сектора датчиков первой ступени 16 датчиков и два сектора датчиков второй ступени 18 датчиков. Специалистам в данной области техники очевидно, что точное число секторов датчиков в ступени датчиков не является существенной особенностью настоящего изобретения. Более того, в основу выбора числа секторов датчиков может быть положен ряд конструкционных соображений, включая наличие достаточного числа секторов датчиков во второй ступени датчиков для обеспечения соответствия числу зазоров между секторами датчиков в первой ступени датчиков при растянутом состоянии ступеней датчиков.
Описываемое выше расположение датчиков обеспечивает возможность равномерного охвата поверхности во время контроля трубопровода. Если в качестве примера предположить, что в каждой ступени PIGа имеется четыре ступени, то диаметр можно считать разделенным на четыре шага в окружном направлении между секторами датчиков. Для сбора импульсных откликов от стенки трубопровода, имеющего шаг 4,9 мм в окружном направлении, в трубопроводе с внутренним диаметром 300 мм может потребоваться в общей сложности 192 приемных датчика или преобразователя. Если предположить наличие двух ступеней датчиков и четырех сектора датчиков в каждой ступени, то каждый сектор может иметь 24 датчика, размещенных в виде четырех линеек из шести датчиков, расположенных в сетке пространственных координат с шагом 19,6 мм. Для обеспечения полного охвата поверхности трубопровода 12 с сеткой, деление которой составляет 4,9 мм, линейки могут быть последовательно смещены в окружном направлении на 4,9 мм.
Комбинация катушки возбуждения большой площади и относительно малых приемных датчиков может обеспечить высокое разрешение изображения стенки трубопровода 12, формируемого вихревыми токами. В описываемом примере для одновременного возбуждения всех восьми катушек возбуждения системе может потребоваться только один возбуждающий импульс. Для облегчения измерения импульсного отклика на вихревые токи, индуцированные только соседней катушкой возбуждения, датчики могут быть размещены настолько близко к виткам катушки возбуждения, насколько это возможно.
Фиг. 4 - схематичное изображение сектора датчиков многоступенчатого PIGа согласно типичному примеру осуществления настоящего изобретения. Чертеж в целом обозначен ссылочной позицией 48. Фиг. 4 иллюстрирует типичный пример осуществления, который может быть использован для каждого из секторов датчиков, представленных на фиг. 3. В иллюстративных целях на фиг. 4 представлен сектор 30 датчиков первой ступени 16 датчиков. Средством возбуждения соответствующих датчиков в секторе 30 датчиков служит катушка 74 возбуждения. Катушка возбуждения используется для инжекции импульсного магнитного потока в стенку трубопровода 12. Как поясняется ниже со ссылками на фиг. 5, эту инжекцию целесообразно осуществлять с помощью прямоугольного импульса электрического тока от генератора импульсов (см. фиг. 6).
Сектор 30 датчиков содержит множество преобразователей 50, 52, 54, 56, 58 и 60, размещенных в виде вертикальных линеек, как показано на фиг. 4. На фиг. 4 каждый из преобразователей 50, 52, 54, 56, 58 и 60 имеет свою собственную ссылочную позицию, но в целом они соответствуют датчикам 42, представленным на фиг. 3. В качестве примера на фиг. 4 показан сектор 30 датчиков, однако подобным образом могут быть размещены и другие секторы датчиков данной ступени датчиков. Линейки, образованные преобразователями 50, 52, 54, 56 и 58, смещены одна относительно другой на четверти диаметра преобразователей. То есть преобразователи размещены так, что центровая линия 64 преобразователя 50 (в составе второй линейки слева) проходит через преобразователь 58 (четвертой и последней линейки слева) приблизительно на расстоянии четверти диаметра от верхней части датчика 58. Центровая линия 68 датчика 52 (в составе первой линейки слева) проходит через преобразователь 58 приблизительно на расстоянии четверти диаметра от нижней части датчика 58. Центровая линия 70 преобразователя 60 (в составе третьей линейки слева) проходит между датчиком 58 и датчиком 62. Наконец, центровая линия 72 преобразователя 54 проходит через датчик 62 приблизительно на расстоянии одной четверти диаметра от верхней части датчика 62. Типичное расположение датчиков, представленное на фиг. 4, обеспечивает охват трубопровода 12 с перекрытием.
Представленный на фиг. 5 график служит для объяснения использования технологии PEC в PIGе 14 (фиг. 1). График в целом обозначен ссылочной позицией 76. Ось 78 X в верхней части графика 76 соответствует времени в миллисекундах. Ось 80 Y в верхней части графика 76 соответствует индукционному току через катушку возбуждения типа катушки 74 возбуждения (фиг. 4). Сигнал 82 индукционного тока PEC представлен графиком в системе координат, образованной осью 78 X и осью 80 Y. На фиг. 5 показано быстрое нарастание индукционного тока приблизительно в течение 0,01 мс до относительно устойчивого уровня, длящегося приблизительно в течение 0,01-50 мс, и последующее его резкое снижение.
В нижней части фиг. 5 представлен соответствующий сигнал напряжения, индуцированного в приемных датчиках типа преобразователей 52, 54, 56, 58, 60 и 62, показанных на фиг. 4. Ось 86 X в нижней части графика соответствует времени в миллисекундах. Ось 88 Y соответствует сигнальному напряжению. Сигнал 90 напряжения датчиков иллюстрирует соответствующее напряжение датчиков в зависимости от сигнала индукционного тока в верхней части графика на фиг. 5. Как показано, сигнал 90 напряжения датчиков имеет относительно высокий уровень в период быстрого нарастания индукционного тока 82. Затем, в период стабилизации сигнала 82 индукционного тока PEC наблюдается медленное снижение значения сигнала 90 напряжения. Так как на сигнал, принимаемый преобразователями, могут оказывать влияние поврежденные участки трубопровода, то значение сигнала 90 напряжения датчиков в различные моменты времени может соответствовать повреждению трубопровода 12. Путем измерения значения сигнала 90 напряжения датчиков в различные моменты времени можно создать математическую модель эффективности трубопровода типа трубопровода 12. Как показано на фиг. 5, на основе измерений сигнала 90 напряжения датчиков может быть выведено уравнение аппроксимации параметризованной кривой. Во время операции измерений может быть определено и сохранено несколько параметрических коэффициентов 92, соответствующих сигналу 90 напряжения датчиков. Более того, хранение во встроенной памяти PIGа 14 только коэффициентов является выгодным с экономической точки зрения, так как позволяет сохранить данные, соответствующие представлению расширенной секции трубопровода 12, для более поздней оценки. Параметрические коэффициенты 92 могут быть позднее использованы для восстановления сигнала 90 напряжения датчиков с целью определения потенциальных аномалий на поверхности трубопровода 12.
Для определения параметрических коэффициентов 92, характеризующих состояние трубопровода, к фактическому значению, полученному для сигнала 90 напряжения датчиков, может быть применена подпрограмма сжатия. Считается, что эта форма параметризации обеспечивает базис для достаточной оценки стенок трубопровода 12 в типичном диапазоне условий отслаивания датчика, значений проницаемости образца, его удельной проводимости и толщины, ожидаемых во время нормальной работы датчика импульсных вихревых токов для его предполагаемой работы.
Фиг. 6 - блок-схема, демонстрирующая типичный пример осуществления электрической схемы, которая может быть использована для обработки данных, полученных с помощью PIGа 14. Блок-схема в целом обозначена ссылочной позицией 110. Для подачи сигнала PEC на типичный сектор 30 датчиков модуль 112 управления адаптирован к управлению генератором 114 импульсов. В примере осуществления, иллюстрированном фиг. 6, данные от каждой из четырех линеек датчиков на секторе 30 датчиков поступают на соответствующую схему 116, 118, 120 или 122 предварительной обработки. Модули 116, 118, 120 и 122 предварительной обработки выполняют предварительную фильтрацию и ограничение амплитуды на данные. После обработки с помощью схем предварительной обработки данные поступают на соответствующие схемы 124, 126, 128 или 130 полиномиальной аппроксимации. Алгоритм обработки, используемый схемами 124, 126, 128 и 130 полиномиальной аппроксимации, может обеспечивать аппроксимацию полиномиальной кривой к отклику на импульсные вихревые токи, позволяющую определять полиномиальные коэффициенты, рассмотренные выше со ссылками на фиг. 5. Полученные коэффициенты записываются для каждого датчика в каждой точке замера во встроенное устройство хранения данных типа системы 22 сбора данных. Хранение только полиномиальных коэффициентов позволяет уменьшить объем данных, хранимых во встроенном запоминающем устройстве, в 50-100 раз. Для уменьшения числа каналов сбора данных во время сбора данных может быть использовано дополнительное мультиплексирование. Наконец, описанный алгоритм включает в себя в качестве части подпрограммы аппроксимации кривых функцию низкочастотной фильтрации.
По окончании контроля трубопровода система 22 сбора данных может быть подключена к компьютеру для восстановления собранных данных. Если данные соответствуют параметрическим коэффициентам, как описывается выше, то с целью вычисления значения толщины в любой точке, подвергнутой контролю, к полиномиальным коэффициентам применяется передаточная функция. Коэффициенты полученного сигнала используются для аппроксимации нелинейной передаточной функции, связывающей коэффициенты аппроксимации с толщиной, проницаемостью, удельной проводимостью и отслаиванием контрольных образцов, отклики от которых были подвергнуты измерению. При проведении последующих операций контроля трубопровода с неизвестными физическими параметрами осуществляется параметризация измеренного отклика на импульсные вихревые токи и для интерпретации коэффициентов аппроксимации и оценки физических параметров и отслаивания датчика используется предварительно вычисленная передаточная функция. Для создания соответствующей передаточной функции для каждого датчика согласно его положению на секторе датчиков и на ступени датчиков может быть разработано заказное программное обеспечение. Использование вихревых токов позволяет осуществлять построение и анализ двумерных изображений поверхности трубопровода, подвергаемого контролю. Для локализации мест нежелательного истончения стенок могут быть использованы традиционные способы обработки и анализа изображений. Такие места могут быть подвергнуты ремонтным операциям.
На фиг. 7 представлена блок-схема последовательности типичных этапов работы датчика PEC согласно типичному примеру осуществления настоящего изобретения. В целом эта блок-схема обозначена ссылочной позицией 132. Процесс начинается с этапа 134. На этапе 136 устройство измерения импульсных вихревых токов типа PIGа, представленного на фиг. 1, проходит через трубопровод. Как описывается выше, устройство измерения импульсных вихревых токов содержит множество ступеней. Каждая из множества ступеней адаптирована к перемещению между сжатым состоянием, при котором множество датчиков размещено вокруг, по меньшей мере, участка окружности каждой из множества ступеней без зазора между ними, и растянутым состоянием, при котором между датчиками, установленными на каждой из множества ступеней, существует, по меньшей мере, один зазор. Множество датчиков размещено так, что зазор между датчиками, размещенными вокруг первой одной из множества ступеней в растянутом состоянии совмещен с и смещен в продольном направлении от местоположения, по меньшей мере, некоторых из множества датчиков вокруг, по меньшей мере, второй одной из множества ступеней.
На этапе 138 устройство измерения импульсного вихревого тока размещается в сжатом состоянии для облегчения прохождения через суженный участок трубопровода.
Выше в данном документе были проиллюстрированы и описаны только некоторые признаки изобретения, однако специалистам в данной области техники очевидна возможность внесения в него различных изменений и дополнений. Поэтому следует понимать, что прилагаемая формула изобретения предполагает охват всех таких изменений и дополнений, не выходящих за пределы существа изобретения.
Claims (22)
1. Устройство контроля трубопроводов импульсными вихревыми токами, содержащее
множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием; и множество датчиков импульсных вихревых токов, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками импульсных вихревых токов в каждой из множества ступеней в растянутом состоянии, причем множество датчиков импульсных вихревых токов размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики импульсных вихревых токов, так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов.
множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием; и множество датчиков импульсных вихревых токов, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками импульсных вихревых токов в каждой из множества ступеней в растянутом состоянии, причем множество датчиков импульсных вихревых токов размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики импульсных вихревых токов, так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов.
2. Устройство контроля трубопроводов импульсными вихревыми токами по п.1, в котором каждая из множества ступеней содержит множество секторов датчиков.
3. Устройство контроля трубопроводов импульсными вихревыми токами по п.2, в котором некоторые из множества датчиков импульсных вихревых токов размещены в виде линеек на каждом из множества секторов датчиков.
4. Устройство контроля трубопроводов импульсными вихревыми токами по п.1, содержащее модуль управления, который обеспечивает подачу на генератор импульсов сигнала, инициирующего подачу входного сигнала импульсных вихревых токов генератором импульсов на катушку возбуждения для возбуждения, по меньшей мере, некоторых из множества датчиков импульсных вихревых токов.
5. Устройство контроля трубопроводов импульсными вихревыми токами по п.4, в котором катушка возбуждения размещена рядом, по меньшей мере, с некоторыми из множества датчиков импульсных вихревых токов.
6. Устройство контроля трубопроводов импульсными вихревыми токами по п.1, содержащее схему предварительной обработки, адаптированную к приему данных от множества датчиков импульсных вихревых токов и выполнению фильтрации и ограничения амплитуды для данных.
7. Устройство контроля трубопроводов импульсными вихревыми токами по п.1, содержащее модуль полиномиальной аппроксимации, адаптированный к приему данных, полученных с помощью множества датчиков импульсных вихревых токов, и вычислению, по меньшей мере, одного коэффициента полиномиального уравнения, которое аппроксимирует сигнал, соответствующий принимаемым данным.
8. Устройство контроля трубопроводов импульсными вихревыми токами по п.7, содержащее систему сбора данных, которая адаптирована к хранению, по меньшей мере, одного коэффициента.
9. Прибор контроля трубопроводов (PIG), содержащий
множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием; и множество датчиков импульсных вихревых токов, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками импульсных вихревых токов в каждой из множества ступеней в растянутом состоянии, причем множество датчиков импульсных вихревых токов размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики импульсных вихревых токов и так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов;
модуль сбора данных, который адаптирован к приему данных, соответствующих состоянию трубопровода, от множества датчиков; и
источник питания, который адаптирован к подаче питания на модуль сбора данных.
множество ступеней, разнесенных в продольном направлении одна от другой и адаптированных к перемещению между сжатым состоянием и растянутым состоянием; и множество датчиков импульсных вихревых токов, размещенных вокруг, по меньшей мере, участка окружности каждой из множества ступеней в сжатом состоянии, по меньшей мере, с одним зазором между датчиками импульсных вихревых токов в каждой из множества ступеней в растянутом состоянии, причем множество датчиков импульсных вихревых токов размещено так, что, по меньшей мере, один зазор в первой одной из множества ступеней совмещен с участком второй одной из множества ступеней, имеющей размещенные на ней датчики импульсных вихревых токов и так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов;
модуль сбора данных, который адаптирован к приему данных, соответствующих состоянию трубопровода, от множества датчиков; и
источник питания, который адаптирован к подаче питания на модуль сбора данных.
10. Прибор по п.9, содержащий позиционный компонент, адаптированный к определению положения РIGа в трубопроводе.
11. Прибор по п.9, в котором каждая из множества ступеней содержит множество секторов датчиков.
12. Прибор по п.11, в котором некоторые из множества датчиков размещены в виде линеек на каждом из множества секторов датчиков.
13. Прибор по п.9, содержащий модуль управления, который обеспечивает подачу на генератор импульсов сигнала, инициирующего подачу входного сигнала импульсных вихревых токов генератором импульсов на катушку возбуждения для возбуждения, по меньшей мере, некоторых из множества датчиков.
14. Прибор по п.13, в котором катушка возбуждения размещена рядом, по меньшей мере, с некоторыми из множества датчиков.
15. Прибор по п.9, содержащий схему предварительной обработки, адаптированную к приему данных от множества датчиков импульсных вихревых токов и выполнению фильтрации и ограничения амплитуды на данных.
16. Прибор по п.9, содержащий модуль полиномиальной аппроксимации, адаптированный к приему данных, полученных с помощью множества датчиков импульсных вихревых токов, и вычислению, по меньшей мере, одного коэффициента полиномиального уравнения, которое аппроксимирует сигнал, соответствующий принимаемым данным.
17. Прибор по п.16, содержащий систему сбора данных, которая адаптирована к хранению, по меньшей мере, одного коэффициента.
18. Способ оценки трубопровода, содержащий этапы, на которых
перемещают устройство измерения импульсных вихревых токов через трубопровод, где устройство измерения импульсных вихревых токов содержит множество ступеней, причем каждая из множества ступеней адаптирована к перемещению между сжатым состоянием, при котором множество датчиков импульсных вихревых токов размещено вокруг, по меньшей мере, участка окружности каждой из множества ступеней без зазора между ними, и растянутым состоянием, при котором между датчиками, установленными на каждой из множества ступеней, существует, по меньшей мере, один зазор и множество датчиков импульсных вихревых токов размещено так, что зазор между датчиками импульсных вихревых токов, размещенными вокруг первой одной из множества ступеней в растянутом состоянии, совмещен с и смещен в продольном направлении от местоположения, по меньшей мере, некоторых из множества датчиков импульсных вихревых токов вокруг, по меньшей мере, второй одной из множества ступеней так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов; и размещают устройство измерения импульсных вихревых токов в сжатом состоянии для прохождения через суженный участок трубопровода.
перемещают устройство измерения импульсных вихревых токов через трубопровод, где устройство измерения импульсных вихревых токов содержит множество ступеней, причем каждая из множества ступеней адаптирована к перемещению между сжатым состоянием, при котором множество датчиков импульсных вихревых токов размещено вокруг, по меньшей мере, участка окружности каждой из множества ступеней без зазора между ними, и растянутым состоянием, при котором между датчиками, установленными на каждой из множества ступеней, существует, по меньшей мере, один зазор и множество датчиков импульсных вихревых токов размещено так, что зазор между датчиками импульсных вихревых токов, размещенными вокруг первой одной из множества ступеней в растянутом состоянии, совмещен с и смещен в продольном направлении от местоположения, по меньшей мере, некоторых из множества датчиков импульсных вихревых токов вокруг, по меньшей мере, второй одной из множества ступеней так, что полный охват трубопровода по окружности обеспечен посредством датчиков импульсных вихревых токов; и размещают устройство измерения импульсных вихревых токов в сжатом состоянии для прохождения через суженный участок трубопровода.
19. Способ по п.18, содержащий этап, на котором обеспечивают подачу на генератор импульсов сигнала, инициирующего подачу входного сигнала импульсных вихревых токов генератором импульсов на катушку возбуждения для возбуждения, по меньшей мере, некоторых из множества датчиков.
20. Способ по п.18, содержащий этапы, на которых принимают данные данных от множества датчиков импульсных вихревых токов; выполняют операции фильтрации на принимаемых данных и выполняют операции ограничения амплитуды на принимаемых данных.
21. Способ по п.18, содержащий этапы, на которых выполняют операции полиномиального аппроксимации на данных, принимаемых от множества датчиков импульсных вихревых токов; и вычисляют, по меньшей мере, один коэффициент полиномиального уравнения, который аппроксимирует сигнал, соответствующий принимаемым данным.
22. Способ по п.21, содержащий этап, на котором сохраняют, по меньшей мере, один коэффициент в модуле сбора данных.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/290,916 US7402999B2 (en) | 2005-11-30 | 2005-11-30 | Pulsed eddy current pipeline inspection system and method |
| US11/290,916 | 2005-11-30 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2008126263A RU2008126263A (ru) | 2010-01-10 |
| RU2419787C2 true RU2419787C2 (ru) | 2011-05-27 |
Family
ID=37866336
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2008126263/28A RU2419787C2 (ru) | 2005-11-30 | 2006-11-29 | Система и способ контроля трубопроводов импульсными вихревыми токами |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US7402999B2 (ru) |
| EP (1) | EP1957968A1 (ru) |
| JP (1) | JP5216598B2 (ru) |
| CN (2) | CN101360995A (ru) |
| CA (1) | CA2630050C (ru) |
| NO (1) | NO20082653L (ru) |
| RU (1) | RU2419787C2 (ru) |
| WO (1) | WO2007064677A1 (ru) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2688030C1 (ru) * | 2018-06-27 | 2019-05-17 | Дмитрий Леонидович Грохольский | Способ контроля неравномерности толщины стенок трубопроводов |
| RU2703496C1 (ru) * | 2016-07-01 | 2019-10-17 | Иллинойс Тул Воркс Инк. | Интегрированная система и способ для трехосевого сканирования на месте и обнаружения дефектов в объекте при статическом и циклическом испытании |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7706988B2 (en) * | 2008-03-14 | 2010-04-27 | Blade Energy Partners, Inc. | Method for improved crack detection and discrimination using circumferential magnetic flux leakage |
| FR2931242B1 (fr) * | 2008-05-14 | 2010-06-11 | Snecma | Sonde destinee au controle par courants de foucault de la surface d'une alveole circonferentielle d'un disque de turboreacteur |
| US8378667B2 (en) * | 2009-05-22 | 2013-02-19 | Tdw Delaware Inc. | System and method for detecting the passage of an object in pipeline including shielded magnetometer and a microcontroller with adaptive thresholding detection means |
| US8264221B2 (en) * | 2009-07-31 | 2012-09-11 | Olympus Ndt | Eddy current probe assembly adjustable for inspecting test objects of different sizes |
| EP2464822A1 (en) * | 2009-08-14 | 2012-06-20 | Paul Lott | Pipeline inspection apparatus and method |
| JP5562629B2 (ja) * | 2009-12-22 | 2014-07-30 | 三菱重工業株式会社 | 探傷装置及び探傷方法 |
| US8633713B2 (en) * | 2011-04-11 | 2014-01-21 | Crts, Inc. | Internal pipe coating inspection robot |
| JP6006990B2 (ja) * | 2011-06-10 | 2016-10-12 | 日立Geニュークリア・エナジー株式会社 | 渦電流探傷プローブ |
| US8884614B2 (en) * | 2011-10-31 | 2014-11-11 | General Electric Company | Eddy current array probe |
| EP2864771A1 (en) * | 2012-06-21 | 2015-04-29 | Eddyfi NDT Inc. | High resolution eddy current array probe |
| FR3008490B1 (fr) * | 2013-07-10 | 2015-08-07 | Snecma | Dispositif pour l'inspection d'une surface d'une piece electriquement conductrice |
| JP2017138099A (ja) * | 2014-06-19 | 2017-08-10 | コニカミノルタ株式会社 | 非破壊検査装置 |
| EP3132114A4 (en) * | 2014-07-11 | 2018-03-07 | Halliburton Energy Services, Inc. | Micro-focused imaging of wellbore pipe defects |
| WO2016057814A1 (en) * | 2014-10-10 | 2016-04-14 | Exxam Systems, LLC | Eddy current pipeline inspection apparatus and method |
| CN105334260A (zh) * | 2015-11-09 | 2016-02-17 | 四川大学 | 一种钢管脉冲磁化漏磁探伤装置 |
| CA2951848C (en) | 2015-12-15 | 2024-01-16 | Eddyfi Ndt Inc. | Pulsed eddy current testing with dual-purpose coils |
| US10302594B2 (en) * | 2016-02-01 | 2019-05-28 | General Electric Technology Gmbh | Apparatus and method for determining the integrity of a tube |
| US10401325B2 (en) * | 2016-08-11 | 2019-09-03 | Novitech, Inc. | Magnetizers for pigging tools |
| US10260854B2 (en) | 2016-12-07 | 2019-04-16 | Probe Technology Services, Inc. | Pulsed eddy current casing inspection tool |
| US10746698B2 (en) | 2017-01-31 | 2020-08-18 | Exxam Systems, LLC | Eddy current pipeline inspection using swept frequency |
| CN109491306B (zh) * | 2017-09-11 | 2024-01-23 | 清华大学 | 动态磁检测探头及电磁控阵方法 |
| CN108303086B (zh) * | 2018-02-09 | 2023-12-15 | 北京零偏科技有限责任公司 | 一种里程计内置的地下管线惯性定位仪 |
| CN112888940B (zh) * | 2018-08-08 | 2024-07-16 | 蓬勃科技有限公司 | 一种金属管道缺陷检测的方法和装置 |
| CN113702490B (zh) * | 2021-08-27 | 2024-04-30 | 重庆邮电大学 | 一种基于涡流热传导的混凝土内部钢筋锈蚀量估计方法 |
| US12523633B2 (en) | 2024-02-06 | 2026-01-13 | Novitech Inc. | Magnetizers for pigging tools having rotational elements |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3225293A (en) * | 1964-02-20 | 1965-12-21 | Fenton M Wood | Apparatus for inspecting pipe for defects |
| WO1995000840A1 (en) * | 1993-06-21 | 1995-01-05 | Atlantic Richfield Company | Detection of cracks with transient electromagnetic diffusion inspection method |
| US6196075B1 (en) * | 1997-10-22 | 2001-03-06 | Pipetronix Gmbh | Device for inspection of pipes |
| RU2240549C1 (ru) * | 2003-09-25 | 2004-11-20 | ЗАО "Нефтегазкомплектсервис" | Внутритрубный дефектоскоп (варианты) |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3483466A (en) | 1967-11-03 | 1969-12-09 | American Mach & Foundry | Pipeline inspection apparatus for detection of longitudinal defects |
| US3539915A (en) * | 1967-11-03 | 1970-11-10 | American Mach & Foundry | Pipeline inspection apparatus for detection of longitudinal defects by flux leakage inspection of circumferential magnetic field |
| US3967194A (en) * | 1974-03-15 | 1976-06-29 | Vetco Offshore Industries | Method for flaw location in a magnetizable pipeline by use of magnetic markers positioned outside of said pipeline |
| DE3511076A1 (de) | 1985-03-27 | 1986-10-09 | Kopp AG International Pipeline Services, 4450 Lingen | Molch fuer elektromagnetische pruefungen an rohrleitungswandungen aus stahl sowie verfahren hierzu |
| US4675604A (en) * | 1985-08-28 | 1987-06-23 | Exxon Production Research Co. | Computerized and motorized electromagnetic flux leakage internal diameter tubular inspection device |
| US4808924A (en) * | 1987-02-19 | 1989-02-28 | Atomic Energy Of Canada Limited | Circumferentially compensating eddy current probe with alternately polarized transmit coils and receiver coils |
| GB2219975B (en) | 1988-06-23 | 1992-05-20 | Hodgkinson & Corby Limited | Standing frame assembly |
| FR2668605B1 (fr) * | 1990-10-31 | 1994-03-18 | Commissariat A Energie Atomique | Sonde de controle de tubes cintres, a tete de controle tournante. |
| JPH0577760U (ja) * | 1991-05-28 | 1993-10-22 | 原子燃料工業株式会社 | 金属細管の検査装置 |
| CA2076205C (en) * | 1992-08-14 | 1999-04-20 | Valentino S. Cecco | Differential transmit-receive eddy current probe incorporating bracelets of multi-coil units |
| JP3180853B2 (ja) * | 1993-02-02 | 2001-06-25 | 東京瓦斯株式会社 | リモートフィールド渦流式探傷装置に於ける受信ユニット |
| US5565633A (en) * | 1993-07-30 | 1996-10-15 | Wernicke; Timothy K. | Spiral tractor apparatus and method |
| US5479100A (en) * | 1994-05-10 | 1995-12-26 | Gas Research Institute | Method for detecting anomalies in pipes |
| JP3428734B2 (ja) * | 1994-08-01 | 2003-07-22 | 東京瓦斯株式会社 | 金属管探傷装置及び金属管探傷方法 |
| JPH0949825A (ja) * | 1995-08-04 | 1997-02-18 | Genshiryoku Eng:Kk | 渦電流探傷プローブ |
| JPH10160710A (ja) * | 1996-11-27 | 1998-06-19 | Nippon Hihakai Keisoku Kenkyusho:Kk | 分割型探傷センサ及び導電性管探傷方法 |
| US6232773B1 (en) * | 1998-09-05 | 2001-05-15 | Bj Services Company | Consistent drag floating backing bar system for pipeline pigs and method for using the same |
| AUPP813499A0 (en) * | 1999-01-13 | 1999-02-04 | Rock Solid Research Pty. Ltd. | A subsurface pipeline inspection probe |
| US6429759B1 (en) | 2000-02-14 | 2002-08-06 | General Electric Company | Split and angled contacts |
| JP2002005893A (ja) * | 2000-06-20 | 2002-01-09 | Tokyo Gas Co Ltd | 管内検査装置における欠陥判別方法及びセンサの校正方法 |
| US6414483B1 (en) | 2000-07-27 | 2002-07-02 | General Electric Company | Eddy current inspection method and apparatus for detecting flaws in an electrically conductive component |
| JP2002062279A (ja) * | 2000-08-22 | 2002-02-28 | Tokyo Gas Co Ltd | 漏洩磁束ピグ |
| US6911826B2 (en) | 2001-06-12 | 2005-06-28 | General Electric Company | Pulsed eddy current sensor probes and inspection methods |
| US6720775B2 (en) | 2001-06-12 | 2004-04-13 | General Electric Company | Pulsed eddy current two-dimensional sensor array inspection probe and system |
| US6451089B1 (en) * | 2001-07-25 | 2002-09-17 | Phelps Dodge Corporation | Process for direct electrowinning of copper |
| US6670808B2 (en) | 2001-08-27 | 2003-12-30 | General Electric Company | Self reference eddy current probe, measurement system, and measurement method |
| US6545469B1 (en) | 2001-10-31 | 2003-04-08 | General Electric Company | Embedded eddy current inspection apparatus, system, and method |
| WO2003073572A2 (en) | 2002-02-25 | 2003-09-04 | General Electric Company | Method and apparatus for optimized centralized critical control architecture for switchgear and power equipment |
| US6707297B2 (en) | 2002-04-15 | 2004-03-16 | General Electric Company | Method for in-situ eddy current inspection of coated components in turbine engines |
| US6794963B2 (en) | 2002-04-24 | 2004-09-21 | General Electric Company | Magnetic device for a magnetic trip unit |
| US6812697B2 (en) | 2002-09-24 | 2004-11-02 | General Electric Company | Molded eddy current array probe |
| DE10300383B4 (de) | 2003-01-09 | 2005-05-12 | Windhoff Bahn- Und Anlagentechnik Gmbh | Rohrleitungsmolch |
| JP2004251839A (ja) * | 2003-02-21 | 2004-09-09 | Jfe Steel Kk | 管内表面傷検査装置 |
| US6888347B2 (en) | 2003-09-12 | 2005-05-03 | General Electric Company | Omnidirectional eddy current probes, array probes, and inspection systems |
| US6922641B2 (en) | 2003-09-17 | 2005-07-26 | General Electric Company | System and method for monitoring defects in structures |
| US7005851B2 (en) * | 2003-09-30 | 2006-02-28 | General Electric Company | Methods and apparatus for inspection utilizing pulsed eddy current |
| US6847207B1 (en) * | 2004-04-15 | 2005-01-25 | Tdw Delaware, Inc. | ID-OD discrimination sensor concept for a magnetic flux leakage inspection tool |
-
2005
- 2005-11-30 US US11/290,916 patent/US7402999B2/en not_active Expired - Lifetime
-
2006
- 2006-11-29 WO PCT/US2006/045637 patent/WO2007064677A1/en not_active Ceased
- 2006-11-29 JP JP2008543406A patent/JP5216598B2/ja not_active Expired - Fee Related
- 2006-11-29 CA CA2630050A patent/CA2630050C/en not_active Expired - Fee Related
- 2006-11-29 RU RU2008126263/28A patent/RU2419787C2/ru not_active IP Right Cessation
- 2006-11-29 EP EP06844615A patent/EP1957968A1/en not_active Ceased
- 2006-11-29 CN CNA2006800515336A patent/CN101360995A/zh active Pending
- 2006-11-29 CN CN2012101251031A patent/CN102680569A/zh active Pending
-
2008
- 2008-06-13 NO NO20082653A patent/NO20082653L/no not_active Application Discontinuation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3225293A (en) * | 1964-02-20 | 1965-12-21 | Fenton M Wood | Apparatus for inspecting pipe for defects |
| WO1995000840A1 (en) * | 1993-06-21 | 1995-01-05 | Atlantic Richfield Company | Detection of cracks with transient electromagnetic diffusion inspection method |
| US6196075B1 (en) * | 1997-10-22 | 2001-03-06 | Pipetronix Gmbh | Device for inspection of pipes |
| RU2240549C1 (ru) * | 2003-09-25 | 2004-11-20 | ЗАО "Нефтегазкомплектсервис" | Внутритрубный дефектоскоп (варианты) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2703496C1 (ru) * | 2016-07-01 | 2019-10-17 | Иллинойс Тул Воркс Инк. | Интегрированная система и способ для трехосевого сканирования на месте и обнаружения дефектов в объекте при статическом и циклическом испытании |
| RU2688030C1 (ru) * | 2018-06-27 | 2019-05-17 | Дмитрий Леонидович Грохольский | Способ контроля неравномерности толщины стенок трубопроводов |
Also Published As
| Publication number | Publication date |
|---|---|
| NO20082653L (no) | 2008-06-13 |
| US7402999B2 (en) | 2008-07-22 |
| US20070120559A1 (en) | 2007-05-31 |
| JP2009517694A (ja) | 2009-04-30 |
| EP1957968A1 (en) | 2008-08-20 |
| CA2630050C (en) | 2015-08-04 |
| CN101360995A (zh) | 2009-02-04 |
| CN102680569A (zh) | 2012-09-19 |
| JP5216598B2 (ja) | 2013-06-19 |
| RU2008126263A (ru) | 2010-01-10 |
| WO2007064677A1 (en) | 2007-06-07 |
| CA2630050A1 (en) | 2007-06-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2419787C2 (ru) | Система и способ контроля трубопроводов импульсными вихревыми токами | |
| US8949042B1 (en) | AUV pipeline inspection using magnetic tomography | |
| US5963030A (en) | Pipe inspection apparatus and process | |
| Usarek et al. | Inspection of gas pipelines using magnetic flux leakage technology | |
| JP5522699B2 (ja) | パルス磁気を用いた非破壊検査装置及び非破壊検査方法 | |
| US20090031813A1 (en) | Nondestructive inspection apparatus and nondestructive inspection method using guided wave | |
| Jarvis et al. | Performance evaluation of a magnetic field measurement NDE technique using a model assisted Probability of Detection framework | |
| Brockhaus et al. | In-line inspection (ILI) methods for detecting corrosion in underground pipelines | |
| US20190178844A1 (en) | Differential magnetic evaluation for pipeline inspection | |
| Yuan et al. | Inner circumferential current field testing system with TMR sensor arrays for inner-wall cracks inspection in aluminum tubes | |
| EP4411365A1 (en) | Internal duct integrity inspection equipment using magnetic metal memory | |
| CN103512483B (zh) | 架空管道壁厚腐蚀扫查检测系统 | |
| US7565252B2 (en) | Method for automatic differentiation of weld signals from defect signals in long-range guided-wave inspection using phase comparison | |
| US10788456B2 (en) | Eddy current inspection device for nondestructive testing | |
| Singh et al. | Development of magnetic flux leakage technique for examination of steam generator tubes of prototype fast breeder reactor | |
| Lei et al. | Ultrasonic pig for submarine oil pipeline corrosion inspection | |
| RU2724582C1 (ru) | Способ бесконтактного выявления наличия, месторасположения и степени опасности концентраторов механических напряжений в металле ферромагнитных сооружений | |
| Khajouei et al. | Wall thinning and damage detection techniques in pipelines | |
| KR101977921B1 (ko) | 나선 방향 전류 유도 수단을 구비한 비파괴 검사 장치 | |
| Qi | Experimental study of interference factors and simulation on oil-gas pipeline magnetic flux leakage density signal | |
| Yuan et al. | Novel semi-ring type alternating current field measurement probe for inspection of coiled tubing | |
| RU2838440C1 (ru) | Способ и устройство двойного намагничивания для обнаружения и идентификации трещин в стальных трубопроводах | |
| Lee et al. | A review of real time visualization of eddy currents in a small bore-piping system using solid-state Hall sensor arrays | |
| MX2008007011A (en) | Pulsed eddy current pipeline inspection system and method | |
| KR100360978B1 (ko) | 비파괴식 이중관 검사 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20161130 |