RU2346292C2 - Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала - Google Patents
Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала Download PDFInfo
- Publication number
- RU2346292C2 RU2346292C2 RU2006143928/09A RU2006143928A RU2346292C2 RU 2346292 C2 RU2346292 C2 RU 2346292C2 RU 2006143928/09 A RU2006143928/09 A RU 2006143928/09A RU 2006143928 A RU2006143928 A RU 2006143928A RU 2346292 C2 RU2346292 C2 RU 2346292C2
- Authority
- RU
- Russia
- Prior art keywords
- signal
- generating
- frequency
- input
- complex
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 16
- 238000012937 correction Methods 0.000 title claims description 10
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 claims description 7
- 238000001914 filtration Methods 0.000 claims description 4
- 230000010363 phase shift Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 abstract description 9
- 238000012545 processing Methods 0.000 abstract description 4
- 239000011859 microparticle Substances 0.000 abstract description 3
- 230000000295 complement effect Effects 0.000 abstract description 2
- 230000001360 synchronised effect Effects 0.000 abstract description 2
- 239000012530 fluid Substances 0.000 abstract 2
- 230000000694 effects Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 239000002245 particle Substances 0.000 description 5
- 230000036039 immunity Effects 0.000 description 3
- 238000000149 argon plasma sintering Methods 0.000 description 2
- 239000000654 additive Substances 0.000 description 1
- 230000000996 additive effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000002955 isolation Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000003534 oscillatory effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 238000013139 quantization Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
Images

Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Предлагаемое изобретение относится к области радиолокации и измерительной техники, в частности к устройствам обработки лазерных доплеровских сигналов, и может быть использовано для измерения параметров турбулентных течений газа или жидкости. Достигаемый технический результат - повышение точности измерения турбулентных пульсаций скорости потоков газа и жидкости в условиях меняющейся концентрации микрочастиц в потоке и изменения скорости слежения. Преимущества заявленного способа особенно эффективно проявляются, когда быстродействие фильтра приходится изменять для обеспечения стабильности и устойчивости работы следящего фильтра в условиях изменяющегося соотношения сигнал-шум и характера пульсаций скорости течений. Способ заключается в формировании двух синхронных потоков измерений, дополняющих друг друга. Для этого из сигнала комплексной огибающей входного доплеровского сигнала одновременно формируется дискретный сигнал управления частотой комплексного опорного генератора и дискретный сигнал обратных значений интервалов времени, который затем суммируется с дискретным сигналом управления предшествующего единичного импульса. 3 ил.
Description
Изобретение относится к области радиолокации и измерительной технике, в частности к устройствам обработки лазерных доплеровских сигналов, и может быть использовано для измерения параметров турбулентных течений газа или жидкости.
Известны устройства, предназначенные для обнаружения, выделения из шумов доплеровских сигналов с последующим измерением их частоты и амплитуды (А.С. №570183, 1976 г., Н03D 3/00; А.С. №692379, 1975 г., G01S 9/42; А.С. №698113, 1977 г., Н03В 3/04; А.С. №748799, 1978 г., Н03D 13/00, А.С. №814239, 1979 г., Н03В 2/04, А.С. №1172010, 1983 г., Н03L 7/0; патент №2177159, 2000 г., G01Р 5/26; патент №2252431, 2004 г., G01S 13/524; патент №2252432, 2004 г., G01S 13/524; патент №2252433, 2004 г., G01S 13/524 и др.). Принимаемый сигнал лазерных доплеровских измерителей скорости представляет собой радиоимпульс с доплеровской частотой заполнения и случайной начальной фазой колебания, гауссовой огибающей и случайной длительностью сигнала, который сопровождается аддитивными дробовым и низкочастотным шумами. В турбулентных течениях временная последовательность таких радиоимпульсов представляет собой модулированный по частоте сигнал, который формируется от рассеивающих свет микрочастиц, пролетающих через измерительный объем. Когда концентрация светорассеивающих частиц в измерительном объеме падает, входной сигнал становится редким. Процесс слежения за турбулентными пульсациями скорости прерывается, пока вновь не появится сигнал. Такая ситуация возникает, когда невозможно ввести в поток достаточное количество микрочастиц, например при исследовании высокотемпературных или сверхзвуковых потоков. Для работы с доплеровскими сигналами аппаратура должна обеспечивать поиск, обнаружение сигнала, выделение его из шумов и последующую оценку доплеровской частоты. Из известных способов приема и обработки таких сигналов следящие фильтры нашли широкое применение благодаря своей высокой селективности и помехоустойчивости. Способ обработки такого сигнала с помощью следящего фильтра состоит в следующем: выделяют комплексную огибающую входного сигнала путем переноса спектра входного сигнала в область «нулевых частот», фильтруют его с помощью низкочастотного фильтра, формируют из комплексной огибающей сигнал ошибки рассогласования слежения за частотой входного сигнала, интегрируют его и управляют частотой комплексного опорного сигнала так, чтобы его частота стремилась к или была равна частоте входного сигнала.
К недостаткам этого способа следует отнести инерционность цепи обратной связи слежения, которая из условия устойчивости работы системы и помехоустойчивости должна иметь конечную постоянную времени. Это относится ко всем видам следящих фильтров, отличающихся как способом формирования сигнала ошибки, так и способом управления частотой генератора опорного сигнала.
Известен также процессор следящего типа (Signal Processor Tracker Type, Model 1090-1A, from No. TSI LDV-879-23M-2MBRI, printed in U.S.A.). Он работает на промежуточной частоте и представляет собой две последовательно соединенные системы: фазовой автоподстройки (PLL) и частотной автоподстройки (FLL) с сумматором на выходе.
Недостатком этого устройства является то, что в этой схеме переходные процессы как в петле PLL, так и в петле FLL оказываются взаимозависимыми и требуют постоянного контроля состояния системы слежения (наличия автозахвата), что приводит к потере значительной части входного доплеровского сигнала. Такая схема оказывается работоспособной только при высокой концентрации частиц, когда входной сигнал оказывается практически непрерывным, поэтому данная схема не нашла практического применения.
Наиболее близким по технической сущности заявляемому решению является «Частотно-импульсное устройство автоподстройки частоты» (А.С. №1172010, 1983 г., Н03L 7/0), принятое нами за прототип. Сущность его работы заключается в последовательном выделении комплексной огибающей входного сигнала с помощью умножителя комплексного входного и опорного сигналов, фильтрации, формировании сигнала ошибки рассогласования и формировании сигнала управления частотой комплексного опорного сигнала. Это устройство содержит умножитель входного и комплексного опорного сигналов, выполненный в виде двух смесителей, входы которых соединены и образуют вход сигнала, а опорные входы соединены с выходами генератора комплексного опорного сигнала, вход которого подключен к выходу блока формирования сигнала управления частотой комплексного опорного сигнала, соединенного своим входом с выходом формирователя сигнала ошибки рассогласования, который состоит из следующих блоков: блока формирования оценки мгновенной частоты ошибки, состоящего из последовательно включенных измерителя интервалов времени и постоянного запоминающего устройства обратных значений интервалов времени входных импульсов, блока формирования импульсов и блока определения квадрата огибающей сигнала, которые через фильтры низких частот соединены с выходами смесителей, схему управления блоком оценки мгновенной частоты ошибки и блоком управления частотой генератора комплексного опорного сигнала, содержащая три RS-триггера, три триггера Шмидта, три логических элемента «И», два логических элемента «ИЛИ», два элемента задержки и дискретный фильтр, которые в совокупности образуют комбинационное устройство синхронизации работы схемы.
Недостатком данного устройства является малая точность измерения степени турбулентности, которая в сильной степени зависит от быстродействия следящего фильтра и концентрации частиц в потоке. Известно, что шаг дискретности в такой схеме нельзя выбрать равным оценке мгновенной частоты ошибки, так как всегда присутствует шум входного сигнала, уровень которого постоянно меняется. При наличии шума в сигнале коэффициент пропорциональности всегда должен быть меньше единицы, чтобы обеспечить устойчивость работы следящего фильтра и избежать появления колебательных переходных процессов. В свою очередь, это приводит к появлению переходных процессов при скачках частоты входного сигнала и, как следствие, к искажению результатов оценки доплеровской частоты.
Задачей изобретения является создание способа формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра, обеспечивающего повышение точности измерений изменяющейся частоты входного сигнала путем формирования двух синхронных потоков измерений, дополняющих друг друга и не ухудшающих качество работы следящего фильтра.
Поставленная задача достигается тем, что в способе формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра, который заключается в последовательном выделении комплексной огибающей входного сигнала с помощью умножителя комплексных входного и опорного сигналов, фильтрации, формировании сигнала ошибки рассогласования, формировании сигнала управления частотой комплексного опорного сигнала, согласно предложенному изобретению сигнал ошибки рассогласования преобразуется в асинхронную единичную импульсную последовательность заданных приращений набега фазы разностной частоты комплексной огибающей, из нее одновременно формируется дискретный сигнал управления частотой генератора комплексного опорного сигнала и дискретный сигнал обратных значений интервалов времени, который затем суммируется с дискретным сигналом управления предшествующего единичного импульса, взятыми с соответствующими коэффициентами пропорциональности.
Указанный единый технический результат при осуществлении изобретения достигается тем, что в устройство дополнительно включены блок формирования сигнала текущей фазы, ее знака и амплитуды сигнала и схема дельта-модулятора набега фазы комплексной огибающей на заданную величину дискретности, подсоединенный к выходам упомянутого блока, образующие в совокупности схему формирования ошибки рассогласования. Выход импульсной последовательности дельта-модулятора соединен со входами схем формирования сигнала управления частотой комплексного опорного сигнала и входом измерителя временных интервалов, выходы которых, в свою очередь, соединены с входами вычислительного устройства.
Предлагаемый способ формирования сигналов слежения и коррекции показаний следящего фильтра обладает существенными преимуществами по сравнению с известными аналогами по точности оценки частоты сигнала, разрешающей способности к помехоустойчивости, и позволяет выбирать скорость слежения и полосу фильтрации сигнала, исходя из требований устойчивой работы следящего фильтра, сохраняя при этом точность оценки частоты входного сигнала. Кроме того, выбирая шаг дискретности квантования фазы, появляется возможность работы с любыми по длительности входными сигналами, при этом осуществляется одновременно как процесс слежения, так и коррекция показаний следящего фильтра.
Сущность изобретения поясняется чертежами.
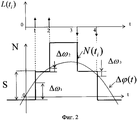
На фиг.1 представлена структурная схема устройства формирования сигнала управления и сигнала коррекции показаний следящего фильтра. На фиг.2 изображены временные последовательности сигналов коррекции и слежения. На фиг.3 представлены результаты измерений степени турбулентности с коррекцией показаний следящего фильтра и без коррекции при изменении концентрации частиц в четыре раза и изменении быстродействия в двадцать раз.
Устройство формирования сигнала управления и сигнала коррекции показаний следящего фильтра (фиг.1) содержит: последовательно включенные умножитель 1 входного  и опорного
и опорного  комплексных сигналов, фильтр низкой частоты 2, блок 3 (СОФАЗ) оценки фазы φ(t), ее знака +/- и амплитуды A2(t) комплексной огибающей доплеровского сигнала. Аббревиатура блока СОФАЗ имеет следующую расшифровку: С - схема, О - оценка, Ф - фаза, А - амплитуда, З - знак. Дельта-модулятор 4, осуществляющий дискретизацию текущей фазы φ(t) с шагом дискретности Δφ и формирующий на выходе единичную импульсную последовательность L(ti) дискретной фазы, формирователь сигнала управления 5, осуществляющий суммирование единичной импульсной последовательности с весовым коэффициентом S (шаг дискретности), соединенный выходом с входом управления генератора 6 комплексного опорного сигнала, измеритель интервалов времени 7, подключенный входом к выходу дельта-модулятора, и вычислительное устройство 8, соединенное с выходами данных N(ti) блока 5 и данных N(Δti+1) измерителя интервалов времени блока 7.
комплексных сигналов, фильтр низкой частоты 2, блок 3 (СОФАЗ) оценки фазы φ(t), ее знака +/- и амплитуды A2(t) комплексной огибающей доплеровского сигнала. Аббревиатура блока СОФАЗ имеет следующую расшифровку: С - схема, О - оценка, Ф - фаза, А - амплитуда, З - знак. Дельта-модулятор 4, осуществляющий дискретизацию текущей фазы φ(t) с шагом дискретности Δφ и формирующий на выходе единичную импульсную последовательность L(ti) дискретной фазы, формирователь сигнала управления 5, осуществляющий суммирование единичной импульсной последовательности с весовым коэффициентом S (шаг дискретности), соединенный выходом с входом управления генератора 6 комплексного опорного сигнала, измеритель интервалов времени 7, подключенный входом к выходу дельта-модулятора, и вычислительное устройство 8, соединенное с выходами данных N(ti) блока 5 и данных N(Δti+1) измерителя интервалов времени блока 7.
На фиг.2 показаны эпюры сигнала набега фазы Δφ(t), данных N(ti) управления частотой генератора, единичная импульсная последовательность L(ti) дискретных приращений фазы, а также частотные ошибки слежения Δω1, Δω2, Δω3 и весовой коэффициент S шага дискретности следящего фильтра.
На фиг.3 представлены результаты измерений на тестовом объекте степени турбулентности Tu при изменении быстродействия следящего фильтра и изменении концентрации частиц.
Заявленное устройство работает следующим образом. Комплексный доплеровский сигнал  поступает на умножитель 1, на опорный вход которого также поступает комплексный сигнал в
поступает на умножитель 1, на опорный вход которого также поступает комплексный сигнал в  с генератора 6 опорного сигнала. В результате на выходе формируется сигнал с одной боковой полосой
с генератора 6 опорного сигнала. В результате на выходе формируется сигнал с одной боковой полосой  .
.
Далее сигнал разностной частоты Δω=ωД-ωГ фильтруется в блоке 2. Сигнал на выходе этого фильтра является комплексной огибающей входного сигнала, когда разностная частота Δω стремится к нулю. С выхода фильтра 2 сигнал подается на вход блока СОФАЗ 3 и далее - на асинхронный дельта-модулятор 4, с помощью которого формируется единичная импульсная последовательность L(ti) приращений набега фазы Δφ(t)=Δω·t во время ΔTi существования доплеровского сигнала с учетом ее знака. Шаг дискретности фазы при этом равен Δφ, а время ΔTi определяется длительностью импульса при превышении А2(t) заданного порога. Далее импульсная последовательность L(ti) суммируется в схеме формирователя сигнала управления 5, где формируется код N(ti) управления частотой генератора 6. Таким образом, замыкается цепь обратной связи и осуществляется слежение за частотой входного сигнала. При этом, как отмечалось выше, точность слежения оказывается недостаточной. Для того чтобы повысить точность измерений, вводится цепь коррекции показаний следящего фильтра. Она содержит измеритель интервалов Δti+1 времени (блок 7) между импульсами единичной последовательности L(ti). Код N(ti) управления и код N(Δti+1) времени Δti+1 поступают на вычислительное устройство 8, где осуществляется коррекция показаний следящего фильтра в соответствии с выражением  , где К1 - коэффициент пропорциональности между кодом управления Nt(ti) и частотой ωГ; K2 - коэффициент пропорциональности разностной частоты Δω и длительности интервалов времени Δti+1 между импульсами разностной частоты. Выходная последовательность кодов
, где К1 - коэффициент пропорциональности между кодом управления Nt(ti) и частотой ωГ; K2 - коэффициент пропорциональности разностной частоты Δω и длительности интервалов времени Δti+1 между импульсами разностной частоты. Выходная последовательность кодов  соответствует мгновенной скорости исследуемого потока, которая не зависит от быстродействия следящего фильтра.
соответствует мгновенной скорости исследуемого потока, которая не зависит от быстродействия следящего фильтра.
Технический результат от использования предлагаемого способа и устройства заключается в повышении точности оценки частоты входного сигнала, повышении надежности и стабильности работы всей системы.
Реализация устройства не вызывает трудностей, т.к. все блоки выполняются на основе известных и широко распространенных радиотехнических элементов. Современный уровень технологий позволяет реализовать предлагаемое техническое решение на цифровых программируемых структурах, реализуемых на базовых платформах ALTERA и XILINX и др.
Claims (1)
- Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала, заключающийся в последовательном выделении комплексной огибающей входного сигнала с помощью умножителя комплексных входного и опорного сигналов, фильтрации, формировании сигнала ошибки рассогласования, формировании сигнала управления частотой комплексного опорного сигнала, отличающийся тем, что сигнал ошибки рассогласования преобразуется в асинхронную единичную импульсную последовательность заданных приращений набега фазы разностной частоты комплексной огибающей, из которой одновременно формируется дискретный сигнал управления частотой генератора комплексного опорного сигнала и дискретный сигнал обратных значений интервалов времени, который затем суммируется с дискретным сигналом управления предшествующего единичного импульса, взятыми с соответствующими коэффициентами пропорциональности.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006143928/09A RU2346292C2 (ru) | 2006-12-11 | 2006-12-11 | Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006143928/09A RU2346292C2 (ru) | 2006-12-11 | 2006-12-11 | Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2006143928A RU2006143928A (ru) | 2008-06-27 |
| RU2346292C2 true RU2346292C2 (ru) | 2009-02-10 |
Family
ID=39679462
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006143928/09A RU2346292C2 (ru) | 2006-12-11 | 2006-12-11 | Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2346292C2 (ru) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4496949A (en) * | 1980-07-16 | 1985-01-29 | Selenia, Industrie Elettroniche Associate, S.P.A. | MTI Radar adaptable to different environmental conditions |
| US5081459A (en) * | 1989-11-17 | 1992-01-14 | Thomson-Csf | Doppler radar for the detection and localizing of helicopters |
| WO2003079046A1 (en) * | 2002-03-13 | 2003-09-25 | Raytheon Canada Limited | An adaptive system and method for radar detection |
| RU2252433C1 (ru) * | 2004-01-08 | 2005-05-20 | Открытое акционерное общество "Научно-производственное предприятие "Радар ммс" | Следящий фильтр сигнала движущейся цели |
| RU2252432C1 (ru) * | 2004-01-08 | 2005-05-20 | Открытое акционерное общество "Научно-производственное предприятие "Радар ммс" | Следящий фильтр сигнала движущейся цели |
-
2006
- 2006-12-11 RU RU2006143928/09A patent/RU2346292C2/ru not_active IP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4496949A (en) * | 1980-07-16 | 1985-01-29 | Selenia, Industrie Elettroniche Associate, S.P.A. | MTI Radar adaptable to different environmental conditions |
| US5081459A (en) * | 1989-11-17 | 1992-01-14 | Thomson-Csf | Doppler radar for the detection and localizing of helicopters |
| WO2003079046A1 (en) * | 2002-03-13 | 2003-09-25 | Raytheon Canada Limited | An adaptive system and method for radar detection |
| RU2252433C1 (ru) * | 2004-01-08 | 2005-05-20 | Открытое акционерное общество "Научно-производственное предприятие "Радар ммс" | Следящий фильтр сигнала движущейся цели |
| RU2252432C1 (ru) * | 2004-01-08 | 2005-05-20 | Открытое акционерное общество "Научно-производственное предприятие "Радар ммс" | Следящий фильтр сигнала движущейся цели |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2006143928A (ru) | 2008-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6435038B1 (en) | Ultrasonic flow velocity measuring apparatus | |
| JP4904289B2 (ja) | モジュロ2pi剰余トラッキングを用いた超音波流量センサ | |
| US8508213B2 (en) | Frequency measurement device | |
| JP4962804B2 (ja) | コリオリ流量計 | |
| US20190323878A1 (en) | Device and method for measurement of ultrasonic transit times | |
| TWI519790B (zh) | 流速計 | |
| JP5682812B2 (ja) | 周波数差分出力装置、周波数測定装置、電子機器、及び周波数測定方法 | |
| Sandenbergh et al. | Synchronizing network radar using all-in-view GPS-disciplined oscillators | |
| EP0097041B1 (en) | Correlation of noise signals | |
| US4616510A (en) | Fluid velocity measuring method and apparatus | |
| RU2346292C2 (ru) | Способ формирования сигнала ошибки слежения и сигнала коррекции показаний следящего фильтра комплексной огибающей входного сигнала | |
| CN105717526B (zh) | 一种基于相位误差限幅处理的载波相位周跳抑制方法 | |
| CN104614545B (zh) | 流速计 | |
| US7046345B2 (en) | Apparatus for precise distance measurement | |
| CN112835056A (zh) | 用于激光测振仪的多普勒频移信号处理方法及其电路系统 | |
| EP0162987B1 (fr) | Procédé et installation pour mesurer le debit d'un fluide par ultrasons | |
| EP0250660B1 (en) | Fluid velocity measuring method and apparatus | |
| RU2225012C2 (ru) | Фазометр с гетеродинным преобразованием частоты | |
| RU2794168C1 (ru) | Многосигнальная система фазовой автоподстройки | |
| EP2639590B1 (en) | Wide range, high resolution frequency monitor | |
| US12123758B2 (en) | Flow sensor performing multi level down sampling and method thereof | |
| US4183245A (en) | Synchronous frequency-to-voltage converter for doppler apparatus | |
| JPH03103724A (ja) | 微小流量カット機能付積算装置 | |
| RU2022297C1 (ru) | Комплексная система измерения дальности | |
| GB2099146A (en) | A phase difference flowmeter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20161212 |