RU2337373C1 - Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления - Google Patents
Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления Download PDFInfo
- Publication number
- RU2337373C1 RU2337373C1 RU2007114683/09A RU2007114683A RU2337373C1 RU 2337373 C1 RU2337373 C1 RU 2337373C1 RU 2007114683/09 A RU2007114683/09 A RU 2007114683/09A RU 2007114683 A RU2007114683 A RU 2007114683A RU 2337373 C1 RU2337373 C1 RU 2337373C1
- Authority
- RU
- Russia
- Prior art keywords
- azimuthal
- phase
- channel
- pulses
- input
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 36
- 238000009825 accumulation Methods 0.000 claims abstract description 42
- 230000001427 coherent effect Effects 0.000 claims abstract description 20
- 238000001514 detection method Methods 0.000 claims abstract description 16
- 230000000737 periodic effect Effects 0.000 claims abstract description 13
- 230000000306 recurrent effect Effects 0.000 claims abstract description 10
- 230000001360 synchronised effect Effects 0.000 claims abstract description 8
- 238000012545 processing Methods 0.000 claims description 35
- 239000000523 sample Substances 0.000 claims description 26
- 238000001228 spectrum Methods 0.000 claims description 23
- 238000001914 filtration Methods 0.000 claims description 20
- 230000005855 radiation Effects 0.000 claims description 14
- 230000010363 phase shift Effects 0.000 claims description 13
- 230000007704 transition Effects 0.000 claims description 13
- 230000006835 compression Effects 0.000 claims description 11
- 238000007906 compression Methods 0.000 claims description 11
- 238000005259 measurement Methods 0.000 claims description 11
- 230000003044 adaptive effect Effects 0.000 claims description 7
- 230000003111 delayed effect Effects 0.000 claims description 7
- 230000015572 biosynthetic process Effects 0.000 claims description 5
- 230000010349 pulsation Effects 0.000 claims 1
- 230000004304 visual acuity Effects 0.000 abstract description 2
- 230000000694 effects Effects 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 230000010355 oscillation Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 238000004891 communication Methods 0.000 description 4
- 240000007320 Pinus strobus Species 0.000 description 3
- 238000005311 autocorrelation function Methods 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000001052 transient effect Effects 0.000 description 3
- 238000005314 correlation function Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 230000016507 interphase Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000005303 weighing Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000012512 characterization method Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000001208 nuclear magnetic resonance pulse sequence Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000012552 review Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images


Landscapes
- Radar Systems Or Details Thereof (AREA)
Abstract
Заявленные изобретения могут быть использованы в наземных импульсных радиолокационных станциях (РЛС) для разрешения целей по азимуту при обзоре или сопровождении целей. Достигаемый технический результат - увеличение разрешающей способности по азимуту в пределах диаграммы направленности (ДН) антенны. В заявленном способе азимутальное разрешение осуществляют расширением спектра зондирующих сигналов за счет межтактовой бинарной фазовой манипуляции зондирующих импульсов в соответствии с кодами, описываемыми периодической линейной рекуррентной цифровой последовательностью, при согласовании периода этой манипуляции с шириной ДН в азимутальной плоскости, и многоканального накопления эхо-сигналов, синхронизированного с указанной манипуляцией зондирующих сигналов. При этом многоканальное накопление эхо-сигналов разделяют на частичное когерентное накопление азимутальной пачки с компенсацией в каналах доплеровского набега фазы одиночных импульсов от движущейся цели и последующее последетекторное накопление всей пачки. Способ азимутального разрешения реализован в предлагаемых способе функционирования обзорной импульсной РЛС и радиолокационной системе для его осуществления. 3 н.п. ф-лы, 6 ил.
Description
Группа изобретений относится к радиолокации и может быть использовано в наземных импульсных радиолокационных станциях (РЛС) для разрешения целей по азимуту при обзоре или сопровождении целей.
Разрешение, заключающееся в выполнении задач обнаружения и измерения координат одной цели при наличии других, близко расположенных по азимуту, дальности и т.д. (см. книгу Финкельштейна М.И. «Основы радиолокации». М, «Радио и связь», 1983, с.8), в отношении угловых координат количественно характеризуется шириной диаграммы направленности (ДН) антенны. Ширина ДН антенны определяется отношением длины волны к апертуре антенны. Поэтому для увеличения разрешающей способности по углу следует увеличивать апертуру антенны или при тех же габаритах использовать более короткие длины волн или, когда реализация этого требования ограничена условиями радиолокационной задачи, разрабатывать сверхнаправленные и синтезированные антенны (см., например, книгу Лезина Ю.С. «Введение в теорию и технику радиотехнических систем». М., «Радио и связь», 1986, с.106).
В качестве аналогов - способов повышения углового разрешения в соответствии с изложенными требованиями - можно привести способ повышения разрешающей способности РЛС путем обужения ДН с использованием процессора, формирующего суммарный и разностный сигналы и вычисляющий корень квадратный из абсолютного значения произведения суммарного и разностного сигналов (см. заявку ЕР №1072901, G01S 13/91, 2001), и способ повышения углового разрешения антенного устройства РЛС переднего и бокового обзора на основе определения доплеровского смещения частоты зондирующего сигнала при последовательном зондировании остронаправленной антенной множества соседних узких областей пространства с последующим комбинированием результатов этого сканирования с результатами сканирования широкой диаграммой (см. заявку DE №19927395, G01S 13/90, 2001).
Указанные аналоги представляют собой специализированные способы углового разрешения с точки зрения привлекаемых ресурсов моноимпульсного режима радиолокации (заявка ЕР №1072901) и модификации радиолокационной системы с использованием устройств синтеза апертуры (заявка DE №19927395), которые недостаточно эффективны для повышения разрешающей способности наземной РЛС кругового обзора по азимуту в связи со спецификой решаемых в этих аналогах задач и условий функционирования используемых средств.
В качестве прототипа заявляемого способа азимутального разрешения выбран известный способ углового разрешения, заключающийся в выполнении на основе когерентного или последетекторного накопления задач обнаружения и измерения угловых координат целей путем сканирования ДН (см. справочник «Радиоэлектронные системы: основы построения и теория». Под ред. Я.Д.Ширмана. М., ЗАО «МАКВИС», 1998, с.454-455, 550-552, 557).
Несмотря на возможность оптимизации углового разрешения на фоне помех в способе-прототипе, задача уменьшения элемента разрешения по азимуту без увеличения массогабаритных параметров антенны обзорной РЛС продолжает сохранять актуальный характер, особенно для РЛС, работающих в длинноволновом диапазоне волн.
В качестве прототипа заявляемого способа функционирования обзорной импульсной РЛС в режиме азимутального разрешения выбран способ, включающий формирование зондирующих импульсов и обработку эхо-сигналов, производимую на основе сканирования ДН в азимутальной плоскости и обеспечивающую путем когерентного и последетекторного накопления азимутальной пачки выполнение задач обнаружения и измерения азимутальных координат целей (см. обзор Бакулева П.А., Степина В.М. «Особенности обработки сигналов в современных обзорных РЛС» в журнале Известия ВУЗов. Серия «Радиоэлектроника». 1986, т.29, №4, с.4-5, а также указанную книгу Финкельштейна М.И., с.237-238, 249-250, 418-419).
В качестве прототипа заявляемой радиолокационной системы для азимутального разрешения выбрана система, содержащая аппаратурные средства импульсной РЛС для формирования зондирующих импульсов, а также обработки эхо-сигналов, обеспечивающей выполнение задач обнаружения и измерения азимутальных координат целей (см. брошюру «Испытания РЛС (оценка характеристик)» Под ред. А.И.Леонова. М., «Радио и связь», 1990, с.12-13).
Технический результат заявляемой группы изобретений - увеличение разрешающей способности по азимуту в пределах ДН (ее главного луча) антенны и улучшение качественных характеристик обрабатываемого сигнала при азимутальном разрешении в обзорной импульсной РЛС, позволяющее повысить точность измерения азимутальной координаты.
Для увеличения разрешающей способности по азимуту в способе азимутального разрешения, заключающемся в выполнении радиолокационных задач обнаружения и измерения азимутальных координат близко расположенных по азимуту целей на основе сканирования ДН в азимутальной плоскости, азимутальное разрешение осуществляют расширением спектра зондирующих сигналов за счет межтактовой бинарной фазовой манипуляции зондирующих импульсов в соответствии с кодами, описываемыми периодической линейной рекуррентной цифровой последовательностью, при согласовании периода этой манипуляции с шириной ДН в азимутальной плоскости, и N канального накопления эхо-сигналов, синхронизированного с указанной манипуляцией зондирующих сигналов. При этом N канальное накопление эхо-сигналов разделяют на частичное когерентное накопление азимутальной пачки с компенсацией в каналах доплеровского набега фазы одиночных импульсов от движущейся цели и последующее последетекторное накопление всей пачки.
Для улучшения качественных характеристик обрабатываемого сигнала при азимутальном разрешении в способе функционирования обзорной импульсной РЛС, включающем формирование зондирующих импульсов и обработку эхо-сигналов, производимую на основе сканирования ДН в азимутальной плоскости и обеспечивающую путем когерентного и последетекторного накопления азимутальной пачки выполнение задач обнаружения и измерения азимутальных координат целей, формируемые зондирующие импульсы подвергают межтактовой бинарной фазовой манипуляции, расширяющей их спектр в соответствии с кодами, описываемыми М-последовательностью или иной рекуррентной цифровой последовательностью, при согласовании периода этой манипуляции с шириной ДН в азимутальной плоскости, а обработку эхо-сигналов синхронизируют с указанной фазовой манипуляцией зондирующих импульсов.
При этом обработку эхо-сигналов производят путем последовательного проведения N канального когерентного накопления части одиночных импульсов азимутальной пачки, амплитудного детектирования обрабатываемых сигналов на выходах N канального когерентного накопления, N канального последетекторного накопления всей азимутальной пачки, отбора импульсов в накопленной азимутальной пачке по максимуму амплитуды и их взвешивания с учетом формы ДН для сравнения с адаптивным порогом обнаружения и измерения азимутальных координат целей.
Причем в каждом канале когерентного накопления осуществляют компенсацию доплеровского набега фазы одиночных импульсов от движущейся цели путем параллельного суммирования и вычитания амплитуд эхо-сигналов, принимаемых без задержки и задержанных на период следования импульсов Тn с доворотом их фазы на величину:
где φn(t) - текущая фаза одиночного импульса в n-м канале накопления;
φn(t-Tn) - фаза одиночного импульса, задержанного на период следования импульсов Тn, равный такту зондирования;
N - длина кода фазоманипулированного сигнала;
n=1,..., N - номер канала накопления.
На выходах N канального когерентного накопления амплитудным детектированием суммарных и разностных сигналов и их вычитанием в каждом канале восстанавливают фазоманипулированную структуру азимутальной пачки.
А в каждом канале последетекторного накопления осуществляют оптимальную фильтрацию сигналов с предварительным переходом от азимутальной пачки с усеченной фазоманипулированной структурой в результате ее модуляции ДН (диаграммой направленности) при сканировании в азимутальной плоскости к азимутальной пачке с квазипериодической фазоманипулированной структурой с числом периодов не менее двух для уменьшения уровня боковых лепестков в элементах разрешения по азимуту и поочередно включают каналы оптимальной фильтрации в режиме компенсации возникающих при указанном переходе дополнительных пиков сжатого сигнала в соседних элементах разрешения по азимуту для устранения неоднозначности измерения азимута.
Для реализации заявляемого способа функционирования обзорной импульсной РЛС в радиолокационной системе азимутального разрешения, входящей в ее состав и содержащей аппаратурные средства формирования зондирующих импульсов, а также обработки эхо-сигналов, обеспечивающей выполнение задач обнаружения и измерения азимутальных координат целей, в указанных аппаратурных средствах к передатчику подключен фазоманипулятор, к входу которого подсоединен блок формирования кодов, описываемых периодической линейной рекуррентной цифровой последовательностью, и выход приемника разветвляется на N каналов N канального тракта обработки, каждый из которых представляет собой последовательно включенные в канал суммарно-разностную схему компенсации доплеровского набега фазы эхо-сигналов от движущихся целей и двухканальную схему оптимальной фильтрации по азимутальной координате и подсоединен к N канальному входу блока отбора импульсов по максимуму амплитуды, выход которого соединен через весовой фильтр учета формы ДН со схемой формирования адаптивного порога обнаружения. Причем к фазоманипулятору и N канальному тракту обработки подключен блок синхронизации, к входу которого подсоединен датчик углового положения антенны.
При этом суммарно-разностная схема компенсации доплеровского набега фазы эхо-сигналов от движущихся целей выполнена в виде линии задержки, на входе соединенной с выходом приемника и на выходе - с входом фазовращателя, подсоединенного двумя выходами к входу блока суммы и входу первого блока разности, каждый из которых своим входом соединен также с выходом приемника и выходом - с входом амплитудного детектора. Причем выходы обоих указанных амплитудных детекторов подсоединены к входу второго блока разности, размещенного на выходе указанной схемы.
А двухканальная схема оптимальной фильтрации по азимутальной координате выполнена в виде двух параллельных каналов с последовательно включенными в каждом из них входным клапанирующим устройством, линией задержки и сумматором, своим входом соединенным также напрямую с выходом входного клапанирующего устройства, оптимальным фильтром сжатия и выходным клапанирующим устройством, обеспечивающими задержку в каналах азимутальной пачки на период ее следования и поочередную работу двух каналов в режиме подачи на их входное и выходное клапанирующие устройства прямого управляющего напряжения типа меандр для первого канала и инверсного - для второго канала. Причем объединенные входы и выходы указанных каналов соединены соответственно с выходом второго блока разности, размещенного на выходе суммарно-разностной схемы компенсации доплеровского набега фазы эхо-сигналов от движущихся целей, и с многоканальным входом блока отбора импульсов по максимуму амплитуды.
Разветвление тракта обработки на N каналов позволяет довернуть фазу эхо-сигнала в суммарно-разностной схеме компенсации доплеровского набега фазы эхо-сигналов от движущихся целей на величину Δφn (см. выражение 1) в зависимости от номера канала и, тем самым, скомпенсировать расстройку по доплеровской частоте в широком диапазоне частот. Число каналов N определяется числом импульсов в азимутальной пачке, которое зависит от тактовой частоты следования импульсов и скорости сканирования ДН антенны в азимутальной плоскости.
Изобретательский уровень заявляемого способа азимутального разрешения подтверждается новизной предлагаемого использования метода расширения спектра зондирующих импульсов для увеличения разрешающей способности по азимуту посредством межтактовой бинарной фазовой манипуляции зондирующих импульсов, период которой согласован с шириной ДН в азимутальной плоскости, и обработки эхо-сигналов путем N канального накопления азимутальной пачки, синхронизированного с указанной манипуляцией зондирующих импульсов и разделенного на когерентное накопление с компенсацией доплеровского набега фазы эхо-сигналов от движущихся целей и последетекторное накопление всей пачки.
Заявляемый способ азимутального разрешения реализуем в заявляемых способе функционирования РЛС и входящей в ее состав системе, обеспечивающих улучшение качественных характеристик обрабатываемого сигнала при азимутальном разрешении, позволяющее повысить точность измерения азимутальной координаты, и образует с ними группу трех изобретений, связанных единым радиолокационным замыслом решения задач обнаружения и измерения азимутальных координат целей.
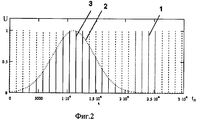
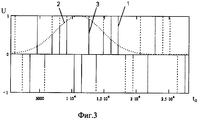
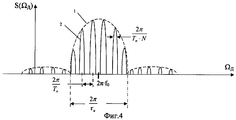
На фиг.1 представлена структурная схема заявляемой радиолокационной системы для азимутального разрешения; на фиг.2 и 3 - структура азимутальной пачки одного из азимутальных направлений соответственно в способе-прототипе (без предлагаемой фазовой манипуляции зондирующих импульсов) и заявляемом способе азимутального разрешения; на фиг.4 - спектр азимутальной пачки с выделенными структурными элементами, поясняющий переход в заявляемом способе на N-канальную схему обработки, позволяющую скомпенсировать доплеровский набег фазы одиночных импульсов от движущейся цели в широком диапазоне доплеровских частот; на фиг.5 и 6 - сжатый эхо-сигнал соответственно на выходе оптимального фильтра сжатия в одном из каналов двухканальной схемы оптимальной фильтрации (в составе заявляемой радиолокационной системы азимутального разрешения) - с нежелательными дополнительными пиками в соседних элементах разрешения по азимуту (переходным процессом), возникающими при переходе к квазипериодической структуре азимутальной пачки для уменьшения уровня боковых лепестков на выходе фильтра сжатия, и на выходе двухканальной схемы оптимальной фильтрации - без переходного процесса в результате компенсации указанных дополнительных пиков.
Предлагаемая радиолокационная система для азимутального разрешения, входящая в состав обзорной импульсной РЛС, содержит передатчик 1, к которому подсоединен фазоманипулятор 2, с подключеннным к нему блоком кодов сигналов, описываемых периодической линейной рекуррентной цифровой последовательностью (на фиг.1 указанный блок не показан, на связь с ним указывает стрелка с обозначением «М-последовательность»), и приемник 3, первый выход которого разветвляется на N каналов N канального тракта обработки.
Каждый из каналов тракта представляет собой последовательно включенные в него суммарно-разностную схему 4 компенсации доплеровского набега фазы эхо-сигналов от движущихся целей и двухканальную схему 5 оптимальной фильтрации по азимутальной координате и подсоединен к N канальному входу блока 6 отбора импульсов по максимуму амплитуды, выход которого соединен через весовой фильтр 7 учета формы ДН со схемой 8 формирования адаптивного порога обнаружения.
К фазоманипулятору 2 и N канальному тракту обработки подсоединен блок 9 синхронизации, к которому подключен датчик 10 углового положения антенны и общий синхронизатор 11 РЛС.
Суммарно-разностная схема 4 компенсации доплеровского набега фазы эхо-сигналов от движущихся целей выполнена в виде фазовращателя 12 с подсоединением к его входу линии задержки 13, соединенной на входе со вторым выходом приемника 3. Фазовращатель 12 подсоединен двумя выходами к первым входам блока суммы 14 и первого блока разности 15, каждый из которых своим вторым входом соединен с выходом приемника 3 и выходом - с входом амплитудного детектора 16. Выходы обоих амплитудных детекторов 16 подсоединены к входам второго блока разности 17, размещенного на выходе схемы 4.
Двухканальная схема 5 оптимальной фильтрации по азимутальной координате выполнена в виде двух параллельных каналов с последовательно включенными в каждом из них входным клапанирующим устройством 18, линией задержки 19 и сумматором 20, своим входом соединенным также напрямую с выходом входного клапанирующего устройства 18, оптимальным фильтром сжатия 21 и выходным клапанирующим устройством 22. Объединенные входы и выходы указанных каналов соединены соответственно с выходом второго блока разности 17, размещенного на выходе схемы 4, и с одним из входов блока 6 отбора импульсов по максимуму амплитуды.
Схема 8 формирования адаптивного порога обнаружения состоит из параллельно подсоединенных к блоку сравнения 23 линии задержки 24 и блока 25 оценки амплитуды эхо-сигналов, входами соединенных с выходом весового фильтра 7 учета формы ДН.
Заявляемый способ азимутального разрешения, реализуемый в предлагаемых способе функционирования обзорной импульсной РЛС и радиолокационной системе для азимутального разрешения, осуществляют следующим образом.
Излучаемые зондирующие импульсы подвергают межтактовой бинарной фазовой манипуляции в соответствии с кодами длины N, описываемыми М-последовательностью или иной рекуррентной цифровой последовательностью, период которой согласован с шириной ДН в азимутальной плоскости, в результате чего расширяют спектр зондирующих импульсов по азимуту в N раз.
Для этого на один из входов фазоманипулятора 2 (см. фиг.1) подают сигнал от генератора высокой частоты, а через другой вход фазоманипулятора 2 вводят межтактовую фазовую манипуляцию, изменяющую фазу каждого такта зондирующих импульсов согласно модулирующей функции выбранного бинарного кода. Причем для выделения зависимости такого модулирования зондирующих импульсов от азимутального положения цели период фазовой манипуляции согласуют с шириной ДН антенны в азимутальной плоскости, а с помощью блока синхронизации 9, в который подают сигналы из общего синхронизатора 11 РЛС и датчика 10 углового положения антенны, синхронизируют временное положение главного луча ДН антенны и начало периода фазовой манипуляции. После чего фазоманипулированные зондирующие импульсы с фазоманипулятора 2 направляют в передатчик 1.
Указанная синхронизация позволяет использовать всю энергию принимаемых колебаний приемником 3 в пределах азимутальной пачки эхо-сигналов, сохраняющих фазоманипулированную структуру зондирующих импульсов, в каналах накопления N канального тракта обработки.
Накопление эхо-сигналов с частичным когерентным и последующим последетекторным накоплением всей азимутальной пачки производят с учетом азимутальной зависимости фазовой структуры сигналов и сочетают с мерами по улучшению ее автокорреляционных свойств, ухудшение которых происходит из-за искажения кода сигнальной пачки, вызванного изменением фазовых соотношений между элементарными ее импульсами вследствие конкретного азимутального положения и движения цели. Улучшения автокорреляционных свойств при этом достигают в результате предлагаемого N канального когерентного накопления фазоманипулированных эхо-сигналов с компенсацией доплеровского набега фазы эхо-сигналов от движущихся целей в каждом канале накопления с помощью схемы 4 и таким образом повышают разрешающую способность по азимуту.
Для этого в суммарно-разностной схеме 4 компенсации доплеровского набега фазы эхо-сигналов от движущихся целей, представляющей собой первую часть каждого канала N канального тракта обработки, реализуют суммарно-разностное когерентное накопление задержанных с помощью линии задержки 13 (величина задержки равна периоду следования импульсов азимутальной пачки) и незадержанных одиночных импульсов азимутальной пачки с помощью блока суммы 14 и блока разности 15. Причем поступающие с выхода приемника 3 и задержанные указанным образом одиночные импульсы азимутальной пачки перед подводом их в блоки 14 и 15 подвергают цифровой обработке с доворотом их фазы в фазовращателе 12 на величину задержки фазы Δφn в соответствии с выражением (1) для компенсации доплеровского набега фазы эхо-сигналов от движущихся целей за период следования одиночных импульсов азимутальной пачки Тn в n-м канале накопления.
Распараллеливание обработки на N каналов с доворотом фазы в каждом из них необходимо, т.к. спектр азимутальной пачки содержит только гармоники, кратные частоте повторения  (см. фиг.4). Это является следствием того, что импульсы в азимутальной пачке следуют не через длительность одиночного импульса τn, а через Тn>>τn. Применение суммарно-разностной схемы 4 компенсации доплеровского набега фазы эхо-сигналов от движущихся целей без доворота фазы в фазовращателе 12, т.е. без разветвления тракта обработки на N каналов, позволяет скомпенсировать влияние частоты Доплера ΩД ( ΩД=2π·FД) только на частотах, кратных частоте повторения Ω. Переход на N-канальную обработку (N - число импульсов) с доворотом фазы на Δφn, в соответствии с выражением (1), дает возможность скомпенсировать влияние частоты Доплера на когерентное накопление эхо-сигналов в произвольном (широком) диапазоне доплеровских частот.
(см. фиг.4). Это является следствием того, что импульсы в азимутальной пачке следуют не через длительность одиночного импульса τn, а через Тn>>τn. Применение суммарно-разностной схемы 4 компенсации доплеровского набега фазы эхо-сигналов от движущихся целей без доворота фазы в фазовращателе 12, т.е. без разветвления тракта обработки на N каналов, позволяет скомпенсировать влияние частоты Доплера ΩД ( ΩД=2π·FД) только на частотах, кратных частоте повторения Ω. Переход на N-канальную обработку (N - число импульсов) с доворотом фазы на Δφn, в соответствии с выражением (1), дает возможность скомпенсировать влияние частоты Доплера на когерентное накопление эхо-сигналов в произвольном (широком) диапазоне доплеровских частот.
Преобразование фазовой модуляции импульсов азимутальной пачки, вызванной движением цели, в амплитудную на выходах блока суммы 14 и блока разности 15 в каждом из N параллельных каналов, дальнейшее детектирование амплитудным детектором 16 и вычитание во втором блоке разности 17, преобразованных суммарного и разностного сигналов, позволяет восстановить кодовую структуру фазоманипулированной азимутальной пачки.
Восстановленную азимутальную пачку затем подвергают в каждом из N параллельных каналов тракта обработки оптимальной фильтрации по азимутальной координате с помощью фильтра сжатия со стационарной импульсной характеристикой вида:
где bn - постоянные коэффициенты оптимальной фильтрации.
При этом в каждой схеме 5, представляющей собой вторую часть канала N канального тракта обработки, реализуют накопление азимутальной пачки с предварительным переходом от азимутальной пачки с усеченной фазоманипулированной структурой как следствие модуляции периодической М-последовательности зондирующих импульсов ДН (диаграммой направленности) антенны при сканировании ее в азимутальной плоскости, к азимутальной пачке с квазипериодической фазоманипулированной структурой, для уменьшения уровня боковых лепестков сжатого сигнала в текущем элементе разрешения по азимуту, и компенсацию возникающих при указанном переходе дополнительных пиков сжатого сигнала в соседних элементах разрешения по азимуту для устранения неоднозначного измерения азимута.
Для этого в каждом канале двухканальной схемы 5 поступающую с выхода соответствующей схемы 4 через входное клапанирующее устройство 18 азимутальную пачку с восстановленной фазоманипулированной структурой суммируют в блоке суммы 20 с задержанной такой же азимутальной пачкой с помощью линии задержки 19 (величина задержки равна длительности азимутальной пачки), увеличивая тем самым длину обрабатываемой азимутальной пачки в два раза (осуществляя двухканальную линейную фильтрацию), т.е. переходят к азимутальной пачке с квазипериодической фазоманипулированной структурой (с малым числом периодов, равным двум). После чего полученную удлиненную азимутальную пачку в каждом канале схемы 5 сжимают с помощью оптимального фильтра сжатия 21 и, пропуская через выходное клапанирующее устройство 22, накапливают в блоке 6 отбора импульсов по максимуму амплитуды. При этом в первом канале схемы 5 на входное клапанирующее устройство 18 подают управляющее напряжение типа прямой меандр, во втором канале на такое же клапанирующее устройство 18 - управляющее напряжение типа инверсный меандр, обеспечивая поочередное включение указанных каналов оптимальной фильтрации в режиме компенсации возникающих при получении квазипериодической азимутальной пачки нежелательных дополнительных пиков (устранения переходного процесса), а в выходных клапанирующих устройствах 22 накапливаемые сигналы стробируют в временном интервале, соответствующем стробу меандра во входных клапанирующих устройствах 18.
Включение на выходе блока 6 весового фильтра 7 учета формы ДН обеспечивает уменьшение боковых лепестков, возникающих из-за влияния модуляции ДН (диаграммой направленности) антенны азимутальной пачки при сканировании, а с помощью схемы 8 формирования адаптивного порога обнаружения выносят окончательное решение о наличии полезного сигнала с текущего азимутального направления.
Технический результат, достигаемый при использовании заявляемого способа азимутального разрешения, подтверждается расчетным показателем-разрешением по азимуту, определяемым величиной  , где Θ - угловая ширина ДН (ее главного луча) антенны, N - число импульсов в азимутальной пачке, равное длине кода фазоманипулированного сигнала и числу каналов накопления N канального тракта обработки.
, где Θ - угловая ширина ДН (ее главного луча) антенны, N - число импульсов в азимутальной пачке, равное длине кода фазоманипулированного сигнала и числу каналов накопления N канального тракта обработки.
Переход от усеченной последовательности импульсов, являющейся следствием модуляции ДН (диаграммой направленности) азимутальной пачки при сканировании в азимутальной плоскости, к квазипериодической последовательности импульсов для уменьшения уровня боковых лепестков сжатой азимутальной пачки и компенсация возникающих при этом дополнительных пиков в соседних элементах разрешения по азимуту (устранение переходного процесса в каналах оптимальной фильтрации по азимутальной координате), ухудшающих измерение азимута, обеспечивают возможность практической реализации предлагаемого увеличения разрешающей способности по азимуту и позволяют повысить точность измерения азимутальной координаты.
В качестве обоснования достижения технического результата от использования предлагаемой группы изобретений приведены следующие доводы.
В обзорных РЛС стробы сопровождения обнаруженных целей по азимуту и дальности не соизмеримы и, как правило, их размер по дальности меньше, чем по азимуту. Данное обстоятельство, в значительной мере, ограничивает характеристики сопровождения целей. Улучшить характеристики сопровождения (значительно уменьшить строб сопровождения по азимуту) возможно за счет межтактного расширения спектра зондирующих импульсов.
Действительно, элемент разрешения по азимуту определяется дальностью до цели R и угловой шириной ДН (ее главного луча) антенны Θ, а по дальности величина строба определяется шириной спектра зондирующих импульсов Δf. Поэтому в обзорных РЛС всегда выполняется условие 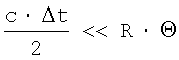 , где с - скорость света,
, где с - скорость света,  , т.е. задача уменьшения элемента разрешения по азимуту без увеличения габаритов антенны представляет практический интерес.
, т.е. задача уменьшения элемента разрешения по азимуту без увеличения габаритов антенны представляет практический интерес.
Увеличение разрешающей способности по дальности двух сигналов достигается за счет расширения их спектра (см. указанную книгу Финкельштейна М.И., с.389). С этой целью спектр зондирующих импульсов расширяют с помощью частотной (или фазовой) модуляции.
Примером частотной модуляции импульсов являются линейно-частотно модулированные (ЛЧМ) импульсы, а фазовой - биполярная манипуляция на основе применения М-последовательностей, последовательностей Якоби, Лежандра и т.п. Суть модуляции заключается в том, что весь импульс длительностью τи разбивается на ряд (n) парциальных импульсов длительностью τ0, частота или фаза которых меняется в зависимости от выбранного закона модуляции. Ширина спектра такого манипулированного сигнала равна  , т.е. увеличивается в n раз.
, т.е. увеличивается в n раз.
Дальнейшая обработка такого сигнала (сжатие) позволяет укоротить его в n раз, т.е. увеличить разрешение по дальности в n раз.
Новым является предлагаемое использование расширения спектра зондирующих импульсов для увеличения разрешающей способности обзорных РЛС по азимуту. Принцип такого увеличения разрешающей способности по азимуту заключается в следующем.
Отражения от одиночной цели в обзорных РЛС с механическим вращением луча антенной системы в азимутальной плоскости представляют собой последовательность импульсов длительностью τu следующих через период повторения Тn(Тn>>τn), огибающая которых промодулирована ДН антенны на прием-передачу. Последовательность этих сигналов можно рассматривать как единый сигнал. Ширина спектра такого сигнала равна  , где N - число импульсов в азимутальной пачке, Тn - период следования импульсов азимутальной пачки в РЛС. Введение в последовательность зондирующих импульсов межтактовой модуляции (в частности, бинарной фазовой модуляции) позволяет расширить спектр азимутальной последовательности до
, где N - число импульсов в азимутальной пачке, Тn - период следования импульсов азимутальной пачки в РЛС. Введение в последовательность зондирующих импульсов межтактовой модуляции (в частности, бинарной фазовой модуляции) позволяет расширить спектр азимутальной последовательности до  , т.е. увеличить в N раз.
, т.е. увеличить в N раз.
Оценим увеличение разрешающей способности по азимуту в обзорных РЛС с механическим вращением антенной системы в азимутальной плоскости за счет межтактного расширения спектра зондирующих импульсов.
Расширение спектра колебаний в пределах азимутальной пачки целесообразно осуществить межтактовой бинарной модуляцией фазы зондирующих импульсов в соответствии с кодами длины N, описываемыми линейными рекуррентными цифровыми последовательностями. Для этой цели наиболее подходят периодические кодовые последовательности с периодом N, коды которых являются последовательностями максимальной длины или М-последовательностями (см. книгу Варакина Л.Е. «Теория сложных сигналов», М., «Советское радио», 1970, с.201).
Механическое вращение ДН антенны по азимуту модулирует периодическую М-последовательность зондирующих импульсов в соответствии с азимутальным положением цели, т.е. формирует усеченную М-последовательность, представляющую собой непериодическую последовательность длиной в период N (см. указанную книгу Варакина Л.Е., с.230). Фазовая структура принимаемых колебаний, отраженных от одиночной цели, становится зависимой от азимутального положения цели, что и определяет возможность более точного измерения азимутального положения цели.
Применение этого метода для измерения азимутальной координаты осложняется тем, что в обзорных РЛС число импульсов в азимутальной пачке, как правило, небольшое и составляет величину N=10÷30 импульсов. Автокорреляционная и взаимокорреляционная функции сигналов с такой базой обладают значительным уровнем боковых лепестков, которые составляют величину  (см. указанную книгу Варакина Л.Е., с.202).
(см. указанную книгу Варакина Л.Е., с.202).
Кроме того, уровень боковых лепестков меняется в значительных пределах из-за наличия доплеровского сдвига центральной частоты в принимаемых колебаниях и амплитудной модуляции диаграммой направленности антенны их огибающей, что не позволяет реализовать потенциальную разрешающую способность по азимуту, определяемую расширением спектра, без принятия специальных мер.
Критерием эффективности таких мер может служить оценка по улучшению автокорреляционных свойств сигнала на выходе тракта обработки перед измерением азимута.
Действительно, отраженный сигнал от точечной цели в азимутальной плоскости записывается следующим выражением (см. книгу Слоки В.К. «Вопросы обработки радиолокационных сигналов». М., «Советское радио», 1970, с.57):
где U1(t) - изменение амплитуды отраженного сигнала от импульса к импульсу вследствие амплитудной модуляции ДН антенны в одном из ее положений в азимутальной плоскости;
N - количество импульсов в азимутальной пачке, определяемое ДН антенны на прием-передачу;
Сn={1 или -1} - изменение фазы импульсов азимутальной пачки на π в соответствии с азимутальным положением цели;
Тn - период следования импульсов азимутальной пачки ( - тактовая частота следования импульсов);
Ψn(t) - закон фазовой модуляции между отдельными импульсами азимутальной пачки (например, вследствие движения цели с постоянной скоростью).
Компенсация фазовой модуляции в пределах азимутальной пачки с помощью соответствующего оптимального фильтра сжатия позволяет укоротить протяженность азимутальной пачки. Корреляционная функция сигнала на выходе оптимального фильтра сжатия в общем виде описывается следующим выражением (см. указанную книгу Слоки В.К., с.32):
где X(t)·  - комплексная огибающая сигнала на входе оптимального фильтра;
- комплексная огибающая сигнала на входе оптимального фильтра;
X*(t-τ) - импульсная характеристика оптимального фильтра;
k - множитель, обратно пропорциональный энергии сигнала.
С учетом амплитудной модуляции сигналов за счет механического вращения антенны пределы в выражении (4) становятся конечными. Выражение (4) можно представить в виде усеченной М-последовательности (см. указанную книгу Варакина Л.Е., с.232):
где b* n-m - усеченная М-последовательность;
m - текущее начало отсчета усеченной М-последовательности;
bn - постоянные коэффициенты оптимальной фильтрации, настроенные на один период М-последовательности;
р - число различных видов импульсов, используемых в М-последовательности (отличающихся, в частности, фазами), р=2;
ΩД - частота Доплера (не меняется в пределах азимутальной пачки).
Согласно основному свойству М-последовательности автокорреляционная функция усеченной М-последовательности имеет величину боковых лепестков порядка  и они носят нестационарный характер (см. указанную книгу Варакина Л.Е., с.232) и приводят к ухудшению разрешающей способности по азимуту.
и они носят нестационарный характер (см. указанную книгу Варакина Л.Е., с.232) и приводят к ухудшению разрешающей способности по азимуту.
Улучшение характеристик автокорреляционной функции достигается уменьшением уровня боковых лепестков. Процедура уменьшения уровня боковых лепестков заключается в переходе от усеченной последовательности к квазипериодической в процессе обработки сигналов, что и позволяет уменьшить уровень боковых лепестков автокорреляционной функции в пределах одного ее периода до  , уже со второго периода последовательности.
, уже со второго периода последовательности.
Данный подход к формированию фазоманипулированной азимутальной пачки и последующая обработка (сжатие) такой квазипериодической азимутальной пачки позволит укоротить элемент разрешения по азимуту пропорционально числу импульсов N в одном периоде азимутальной пачки (периоду М-последовательности). В результате этого появляется возможность повышения в N раз точности измерения азимутального положения цели, которая определяется отношением элемента разрешения по азимуту  к характеристике сигнал/шум q (см. книгу Бартона Д. «Справочник по радиолокационным измерениям». М., «Советское радио», 1976, с.34) в соответствии с выражением:
к характеристике сигнал/шум q (см. книгу Бартона Д. «Справочник по радиолокационным измерениям». М., «Советское радио», 1976, с.34) в соответствии с выражением:
где k=0,5÷1,0.
Для обоснования достижения технического результата заявляемой группы изобретений промоделирована периодическая М-последовательность.
На фиг.2 и 3 показан результат модуляции механическим вращением ДН антенны по азимуту - последовательность тактов зондирующих импульсов длительностью τu, следующих через Тn, в пределах азимутальной пачки как единый сигнал, соответственно, в обычной обзорной РЛС и в ней же с вводом указанной межтактовой фазовой манипуляции в зондирующие импульсы, причем Тn>>τu (на указанных и других фигурах tд - дискретное время). На обеих фигурах позицией 1 обозначен зондирующий импульс каждого азимутального направления, позицией 2 - положение главного лепестка ДН антенны в одном из азимутальных направлений и позицией 3 - промодулированное при зондировании диаграммой направленности антенны принятое колебание, отраженное от одиночной цели с шириной спектра такого колебания, определяемой величиной  (фиг.2) и
(фиг.2) и  (фиг.3).
(фиг.3).
Фазовая структура принимаемых колебаний, отраженных от одиночной цели, в результате модуляции механическим вращением ДН антенны с вводом в зондирующие импульсы межтактовой фазовой манипуляции становится зависимой от азимутального положения цели (см. фиг.3), что дает возможность повысить разрешающую способность по азимуту.
На фиг.4 позицией 1 обозначен спектр одиночного импульса азимутальной пачки, позицией 2 - спектр всей азимутальной пачки, содержащий только гармоники, кратные частоте повторения ( ).
).
Компенсация влияния частоты Доплера фазоманипулированных эхо-сигналов схемой 4 происходит только на частотах, кратных частоте повторения из-за структуры спектра азимутальной пачки (см. фиг.4), и приводит к сдвигу видеокодового сигнала относительно исходного на m знаков и имеет некоторые искажения в начале и конце. При большом числе импульсов в одном периоде М-последовательности, N>>1, этими искажениями можно пренебречь и считать, что продетектированный сигнал имеет такую же кодовую структуру, как исходный (см. указанную книгу Слоки В.К., с.124).
Применение двухканальной схемы 4 ввиду наличия в ней нелинейных элементов приводит к незначительным потерям. Поскольку два импульса в схеме накапливаются когерентно. Некогерентные потери в отношении сигнал/шум на выходе детекторов 16 определяются величиной  , где N - число импульсов в одном периоде М-последовательности.
, где N - число импульсов в одном периоде М-последовательности.
Распараллеливание обработки на N каналов, в каждом из которых осуществляется компенсация частоты Доплера схемой 4, с доворотом фазы эхо-сигнала на Δφn (в зависимости от канала) позволяет скомпенсировать влияние частоты Доплера и на частотах, отличных от частоты повторения, т.е. в произвольном (широком) диапазоне доплеровских частот.
Предварительный переход от азимутальной пачки импульсов с восстановленной усеченной фазоманипулированной структурой как следствием ее модуляции ДН (диаграммой направленности) антенны к азимутальной пачке с квазипериодической фазоманипулированной структурой (увеличением длины азимутальной пачки в два раза) для улучшения характеристики сжатого сигнала (получения сжатого сигнала с наименьшим уровнем боковых лепестков) и оптимальная фильтрация такой удлиненной азимутальной пачки с коэффициентами bn в соответствии с выражением (2), неизменными для любого положения луча и настроенными на один период модулирующей М-последовательности, обеспечивают сжатие азимутальной пачки в N раз (где N - число импульсов в модулирующей М-последовательности), в итоге позволяют получить сжатый сигнал в пределах элемента разрешения с наименьшим уровнем боковых лепестков и, тем самым, улучшить элемент разрешения по азимуту пропорционально N.
Результат такой фильтрации показан на фиг.5 - сжатый сигнал на выходе фильтра 21, соответствующий одному из четырех положений луча ДН (а-г) в пределах элемента разрешения по азимуту. Сигнал характеризуется сжатием азимутальной пачки в количество импульсов в одном периоде - N и основной пик сжатого сигнала перетекает из одного азимутального положения в другое в зависимости от положения ДН антенны в пределах элемента разрешения по азимуту, который ограничивается эффективной шириной главного лепестка (луча) ДН антенны в азимутальной плоскости.
При этом, кроме сжатого основного пика в текущем элементе разрешения по азимуту, появляются дополнительные пики сжатого сигнала в соседнем элементе разрешения по азимуту (в моменты времени t=±N·Tn), возникающие при увеличении длительности обрабатываемой азимутальной пачки - от перехода от усеченной (непериодической) к квазипериодической последовательности импульсов (дополнительные пики обозначены на фиг.5 позицией «переходный процесс»).
Применение двухканальной схемы 5 устраняет эти пики (см. фиг.6), повышая эффективность функционирования обзорной РЛС в режиме азимутального разрешения в результате обеспечения практической возможности повышения разрешающей способности по азимуту, позволяющей повысить точность измерения азимутальной координаты.
Как показано на фиг.6, уровень боковых лепестков на выходе схемы 5 несколько отличается от . Некоторое увеличение уровня боковых лепестков объясняется неполным восстановлением кода сигнальной пачки, обусловленного влиянием движения цели, а также модуляцией огибающей сигнальной пачки ДН антенны по азимуту. При этом накопленные данные на выходе каждого из каналов стробируются во временном интервале, соответствующем стробу меандра на входе канала, а дополнительные пики формируются вне интервала отстробированных входных данных.
Последующее взвешивание в блоке 7 с учетом формы ДН антенны приводит к улучшению ситуации в отношении боковых лепестков в соответствии с заявленным техническим результатом.
Claims (3)
1. Способ азимутального разрешения движущихся целей, заключающийся в обнаружении и измерении азимутальных координат близко расположенных по азимуту целей на основе сканирования диаграммы направленности в азимутальной плоскости, отличающийся тем, что азимутальное разрешение целей осуществляют расширением спектра зондирующих импульсов посредством межтактовой бинарной фазовой манипуляции зондирующих импульсов в соответствии с кодами, описываемыми периодической линейной рекуррентной цифровой последовательностью, при согласовании периода этой манипуляции с шириной диаграммы направленности в азимутальной плоскости и многоканального накопления эхо-сигналов, синхронизированного с указанной манипуляцией зондирующих импульсов и разделенного на частичное когерентное накопление азимутальной пачки с компенсацией в каналах доплеровского набега фазы одиночных импульсов от движущейся цели и последующее последетекторное накопление всей пачки.
2. Способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей, включающий формирование зондирующих импульсов и обработку эхо-сигналов, производимую на основе сканирования диаграммы направленности в азимутальной плоскости и обеспечивающую путем когерентного и последетекторного накопления азимутальной пачки эхо-сигнала обнаружение и измерение азимутальных координат целей, отличающийся тем, что формируемые зондирующие импульсы подвергают межтактовой бинарной фазовой манипуляции, расширяющей их спектр в соответствии с кодами, описываемыми М-последовательностью или иной рекуррентной цифровой последовательностью, при согласовании периода этой манипуляции с шириной диаграммы направленности в азимутальной плоскости, а обработку эхо-сигналов синхронизируют с указанной фазовой манипуляцией зондирующих импульсов и производят путем последовательного проведения многоканального когерентного накопления части одиночных импульсов азимутальной пачки, амплитудного детектирования обрабатываемых сигналов на выходах многоканального когерентного накопления, многоканального последетекторного накопления всей азимутальной пачки, отбора импульсов в накопленной азимутальной пачке по максимуму амплитуды и их взвешивания с учетом формы диаграммы направленности для сравнения с адаптивным порогом обнаружения и измерения азимутальных координат целей, причем в каждом канале когерентного накопления осуществляют компенсацию доплеровского набега фазы одиночных импульсов от движущейся цели путем параллельного суммирования и вычитания амплитуд эхо-сигналов, принимаемых без задержки и задержанных на период следования импульсов Тn с доворотом их фазы на величину
где φn(t) - текущая фаза одиночного импульса в n-м канале накопления;
φn(t-Tn) - фаза одиночного импульса, задержанного на период следования импульсов Тn, равный такту зондирования;
N - длина кода фазоманипулированного сигнала;
n=1,..., N - номер канала накопления;
на выходах многоканального когерентного накопления амплитудным детектированием суммарных и разностных сигналов и их вычитанием в каждом канале восстанавливают кодовую структуру фазоманипулированной азимутальной пачки, а в каждом канале последетекторного накопления осуществляют двухканальную оптимальную фильтрацию сигналов с предварительным переходом от азимутальной пачки с усеченной фазоманипулированной структурой, в результате ее модуляции диаграммой направленности при сканировании в азимутальной плоскости, к азимутальной пачке с квазипериодической фазоманипулированной структурой для уменьшения уровня боковых лепестков в элементах разрешения по азимуту и поочередно включают каналы оптимальной фильтрации в режиме компенсации возникающих при указанном переходе дополнительных пиков сжатого сигнала в соседних элементах разрешения по азимуту для устранения неоднозначности измерения азимута.
3. Радиолокационная система азимутального разрешения движущихся целей, входящая в состав обзорной импульсной радиолокационной станции (РЛС), содержащая средства формирования зондирующих импульсов, а также средства обработки эхо-сигналов, обеспечивающей обнаружение и измерение азимутальных координат целей, отличающаяся тем, что средства формирования зондирующих импульсов содержат передатчик, к входу которого подключен фазоманипулятор, к одному из входов которого подают сигнал от генератора высокой частоты, а к другому входу подсоединен блок формирования кодов, описываемых периодической линейной рекуррентной цифровой последовательностью, средства обработки эхо-сигналов содержат приемник, первый выход которого соединен с N каналами N-канального тракта обработки, каждый из которых представляет собой последовательно включенные в канал суммарно-разностную схему компенсации доплеровского набега фазы эхо-сигналов от движущихся целей и двухканальную схему оптимальной фильтрации по азимутальной координате и подсоединен к соответствующему входу N-канального блока отбора импульсов по максимуму амплитуды, выход которого соединен через весовой фильтр учета формы диаграммы направленности со схемой формирования адаптивного порога обнаружения, причем к фазоманипулятору и N-канальному тракту обработки подключен блок синхронизации, в который подают сигналы из общего синхронизатора РЛС, кроме того, к входу синхронизатора подсоединен датчик углового положения антенны, при этом суммарно-разностная схема компенсации доплеровского набега фазы эхо-сигналов от движущихся целей выполнена в виде линии задержки, на входе соединенной с вторым выходом приемника, а на выходе - с входом фазовращателя, подсоединенного выходом к входу блока суммы и входу первого блока разности, каждый из которых своим входом соединен с первым выходом приемника, а выходом - с входом соответствующего амплитудного детектора, причем выходы обоих амплитудных детекторов подсоединены к входу второго блока разности, а двухканальная схема оптимальной фильтрации по азимутальной координате выполнена в виде двух параллельных каналов с последовательно включенными в каждом из них входным клапанирующим устройством, линией задержки, сумматором, другим своим входом соединенным напрямую с выходом входного клапанирующего устройства, оптимальным фильтром сжатия и выходным клапанирующим устройством, обеспечивающими задержку азимутальной пачки в каналах на период ее следования и поочередную работу двух указанных каналов в режиме подачи на их входное и выходное клапанирующие устройства прямого управляющего напряжения типа меандр для первого канала и инверсного - для второго канала, причем объединенные входы и выходы входного и выходного клапанирующих устройств указанных каналов соединены соответственно с выходом второго блока разности суммарно-разностной схемы компенсации доплеровского набега фазы эхо-сигналов от движущихся целей и с соответствующим входом N-канального блока отбора импульсов по максимуму.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2007114683/09A RU2337373C1 (ru) | 2007-04-18 | 2007-04-18 | Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2007114683/09A RU2337373C1 (ru) | 2007-04-18 | 2007-04-18 | Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2337373C1 true RU2337373C1 (ru) | 2008-10-27 |
Family
ID=40042147
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2007114683/09A RU2337373C1 (ru) | 2007-04-18 | 2007-04-18 | Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2337373C1 (ru) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2480782C1 (ru) * | 2011-10-06 | 2013-04-27 | Открытое акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" | Способ и устройство разрешения движущихся целей по угловым направлениям в обзорных рлс |
| RU2491572C1 (ru) * | 2011-12-28 | 2013-08-27 | Дмитрий Львович Сабаев | Способ обеспечения постоянной разрешающей способности по дальности в импульсной радиолокационной станции с квазислучайной фазовой модуляцией |
| RU2550315C1 (ru) * | 2014-04-01 | 2015-05-10 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Рязанский государственный радиотехнический университет" | Доплеровский фазометр пассивных помех |
| RU2572843C1 (ru) * | 2014-08-05 | 2016-01-20 | Акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" (АО "ФНПЦ "ННИИРТ") | Способ улучшения характеристик измерения азимута наземных целей с учетом отражений от подстилающей поверхности |
| RU2704789C1 (ru) * | 2019-01-15 | 2019-10-31 | Владимир Валентинович Родионов | Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях |
| RU2767317C1 (ru) * | 2021-04-29 | 2022-03-17 | Федеральное государственное казенное военное образовательное учреждение высшего образования "Военный учебно-научный центр Военно-воздушных сил "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" (г. Воронеж) Министерства обороны Российской Федерации | Фильтр сигнала с v-образной частотной модуляцией |
| CN115685122A (zh) * | 2022-10-27 | 2023-02-03 | 南京莱斯电子设备有限公司 | 一种基于回波包络检测的雷达点迹凝聚方法 |
| CN116755070A (zh) * | 2023-05-09 | 2023-09-15 | 西安电子科技大学 | 一种基于相邻波束脉冲积累的微弱目标检测方法 |
| RU2835850C1 (ru) * | 2024-05-02 | 2025-03-04 | Акционерное общество Центральное конструкторское бюро аппаратостроения | Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2084920C1 (ru) * | 1994-01-26 | 1997-07-20 | Николай Александрович Сазонов | Способ селекции движущихся наземных целей |
| US6121915A (en) * | 1997-12-03 | 2000-09-19 | Raytheon Company | Random noise automotive radar system |
| RU2182714C2 (ru) * | 2000-02-09 | 2002-05-20 | Открытое акционерное общество "Корпорация "Фазотрон-Научно-исследовательский институт радиостроения" | Способ углового разрешения цели радиолокационной станцией при обзоре и радиолокационная станция бокового обзора |
| WO2006067012A1 (de) * | 2004-12-20 | 2006-06-29 | Robert Bosch Gmbh | Verfahren zur erweiterung des detektionsbereichs eines radarsystems sowie anordnung |
| RU2292563C2 (ru) * | 2005-03-17 | 2007-01-27 | Открытое акционерное общество "Научно-исследовательский институт измерительных приборов" | Способ обнаружения и сопровождения траектории объекта и обзорная радиолокационная станция для его реализации |
-
2007
- 2007-04-18 RU RU2007114683/09A patent/RU2337373C1/ru active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2084920C1 (ru) * | 1994-01-26 | 1997-07-20 | Николай Александрович Сазонов | Способ селекции движущихся наземных целей |
| US6121915A (en) * | 1997-12-03 | 2000-09-19 | Raytheon Company | Random noise automotive radar system |
| RU2182714C2 (ru) * | 2000-02-09 | 2002-05-20 | Открытое акционерное общество "Корпорация "Фазотрон-Научно-исследовательский институт радиостроения" | Способ углового разрешения цели радиолокационной станцией при обзоре и радиолокационная станция бокового обзора |
| WO2006067012A1 (de) * | 2004-12-20 | 2006-06-29 | Robert Bosch Gmbh | Verfahren zur erweiterung des detektionsbereichs eines radarsystems sowie anordnung |
| RU2292563C2 (ru) * | 2005-03-17 | 2007-01-27 | Открытое акционерное общество "Научно-исследовательский институт измерительных приборов" | Способ обнаружения и сопровождения траектории объекта и обзорная радиолокационная станция для его реализации |
Non-Patent Citations (1)
| Title |
|---|
| Радиоэлектронные системы: основы построения и теория. Под ред. ШИРМАНА Я.Д., Москва, ЗАО «МАКВИС», 1998, с.454, 455, 550-552, 557. * |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2480782C1 (ru) * | 2011-10-06 | 2013-04-27 | Открытое акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" | Способ и устройство разрешения движущихся целей по угловым направлениям в обзорных рлс |
| RU2491572C1 (ru) * | 2011-12-28 | 2013-08-27 | Дмитрий Львович Сабаев | Способ обеспечения постоянной разрешающей способности по дальности в импульсной радиолокационной станции с квазислучайной фазовой модуляцией |
| RU2550315C1 (ru) * | 2014-04-01 | 2015-05-10 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Рязанский государственный радиотехнический университет" | Доплеровский фазометр пассивных помех |
| RU2572843C1 (ru) * | 2014-08-05 | 2016-01-20 | Акционерное общество "Федеральный научно-производственный центр "Нижегородский научно-исследовательский институт радиотехники" (АО "ФНПЦ "ННИИРТ") | Способ улучшения характеристик измерения азимута наземных целей с учетом отражений от подстилающей поверхности |
| RU2704789C1 (ru) * | 2019-01-15 | 2019-10-31 | Владимир Валентинович Родионов | Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях |
| RU2767317C1 (ru) * | 2021-04-29 | 2022-03-17 | Федеральное государственное казенное военное образовательное учреждение высшего образования "Военный учебно-научный центр Военно-воздушных сил "Военно-воздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина" (г. Воронеж) Министерства обороны Российской Федерации | Фильтр сигнала с v-образной частотной модуляцией |
| CN115685122A (zh) * | 2022-10-27 | 2023-02-03 | 南京莱斯电子设备有限公司 | 一种基于回波包络检测的雷达点迹凝聚方法 |
| CN116755070A (zh) * | 2023-05-09 | 2023-09-15 | 西安电子科技大学 | 一种基于相邻波束脉冲积累的微弱目标检测方法 |
| RU2835850C1 (ru) * | 2024-05-02 | 2025-03-04 | Акционерное общество Центральное конструкторское бюро аппаратостроения | Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240192349A1 (en) | Radar apparatus and radar method | |
| US10955542B2 (en) | Radar apparatus and direction-of-arrival estimation device | |
| RU2337373C1 (ru) | Способ азимутального разрешения движущихся целей, способ функционирования обзорной импульсной радиолокационной станции в режиме азимутального разрешения движущихся целей и радиолокационная система для его осуществления | |
| JP6566396B2 (ja) | レーダ装置 | |
| JP6818541B2 (ja) | レーダ装置および測位方法 | |
| US9070972B2 (en) | Wideband beam forming device; wideband beam steering device and corresponding methods | |
| US10613195B2 (en) | Radar apparatus and radar method | |
| US10024958B2 (en) | Radar apparatus | |
| US5151702A (en) | Complementary-sequence pulse radar with matched filtering following doppler filtering | |
| CN110031805B (zh) | 雷达装置 | |
| JP7108929B2 (ja) | レーダ装置及び物標判定方法 | |
| JP2018146443A (ja) | レーダ装置及びレーダ方法 | |
| US20250231284A1 (en) | Radar device | |
| US12449527B2 (en) | Radar device | |
| JP7361266B2 (ja) | レーダ装置 | |
| CA2253235A1 (en) | Radar/sonar system concept for extended range-doppler coverage | |
| Lulu et al. | High-resolution range-Doppler maps by coherent extension of narrowband pulses | |
| JP7266258B2 (ja) | レーダ装置 | |
| JP7117557B2 (ja) | レーダ装置 | |
| JP2019120613A (ja) | レーダ装置、レーダ装置の制御方法、およびプログラム | |
| JP7620747B2 (ja) | レーダ装置 | |
| JP6688977B2 (ja) | レーダ装置 | |
| RU2073879C1 (ru) | Устройство определения угломестной координаты источника радиоизлучения | |
| JP2025104924A (ja) | レーダ装置及び送信方法 | |
| US3795912A (en) | Spectrum analysis radar system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| HK4A | Changes in a published invention | ||
| PD4A | Correction of name of patent owner |