RU2100521C1 - Способ ориентирования и устройство для ориентирования дорожных машин - Google Patents
Способ ориентирования и устройство для ориентирования дорожных машин Download PDFInfo
- Publication number
- RU2100521C1 RU2100521C1 RU95106241A RU95106241A RU2100521C1 RU 2100521 C1 RU2100521 C1 RU 2100521C1 RU 95106241 A RU95106241 A RU 95106241A RU 95106241 A RU95106241 A RU 95106241A RU 2100521 C1 RU2100521 C1 RU 2100521C1
- Authority
- RU
- Russia
- Prior art keywords
- axis
- machine
- target
- marking
- road
- Prior art date
Links
Images







Landscapes
- Road Repair (AREA)
Abstract
Использование: разметка дорог. Сущность изобретения: разметочную машину устанавливают в исходное положение на дороге. Ось рабочего органа совмещают с началом теоретической траектории перемещения рабочего органа. Ось лазерного излучателя располагают в одной вертикальной плоскости разметки с осью рабочего органа и осью полосы разметки. Луч лазера направляют на мишень. Ось мишени также располагают в вертикальной плоскости разметки. Машину при движении ориентируют так, чтобы видимое световое пятно от луча имело минимальные отклонения от оси мишени. При этом мишень может быть установлена стационарно или на движущемся транспортном средстве. Лазерный излучатель крепится над кабиной разметочной машины с возможностью перемещения перпендикулярно ее продольной оси и поворота в двух взаимно перпендикулярных плоскостях и может быть снабжен средством развертки луча в вертикальной плоскости или средством деления луча в горизонтальной плоскости для ориентирования разметочной машины по двум краям дороги. 2 с. и 11 з.п. ф-лы, 14 ил.
Description
Изобретение относится к строительству и эксплуатации дорог, а более конкретно к ориентированию дорожных машин, например, при нанесении с помощью рабочего органа машины на дорожное покрытие разметочных полос краской или пластиком. Соответственно, в первом случае рабочим органом машины является блок из одной, двух или трех краскораспылительных форсунок, а во втором - каретка с соответствующим числом затворов для выпуска расплавленного пластика.
В большинстве случаев нанесению полос разметочной машины предшествует так называемое "тычкование", при котором вдоль струны, натянутой на дорожном покрытии на оси будущей полосы разметки, наносятся краской точки ("тычки"), а ориентирование машины при разметке осуществляется с помощью направляющего ролика, расположенного в одной вертикальной плоскости с осью рабочего органа и осью наносимой полосы разметки, и закрепленного на переднем бампере машины.
При "тычковании" практически все операции выполняются вручную в условиях интенсивного автомобильного движения, с привлечением занчительного числа рабочих, которым приходится работать в условиях повышенной опасности. Чтобы снизить опасность для рабочих, "тычкуемый" участок дороги перегораживают крупногабаритной тяжелой техникой, что увеличивает расходы, резко сокращает пропускную способность дороги и создает опасность столкновения на ней транспортных средств.
Плохо видимый направляющий ролик разметочной машины, выступающий на 1,5-2 м от переднего бампера, также создает, особенно на перекрестках, опасность аварий. В то же время такая длина консоли мала для обеспечения прямолинейности разметки, так как возможные "влияния" ролика трансформируются в близкие по величине отклонения от прямолинейности линии разметки.
Известно устройство для ориентирования разметочной машины с помощью телекамеры, установленной на крыше машины и передающей изображение дороги на монитор. Одновременно на мониторе компьютером создается изображение направляющих линий, положение и форма которых могут меняться с помощью джойстика таким образом, чтобы они были расположены симметрично изображению краев дороги, и по этим линиям компьютер определяет положение центра дороги, а исполнительный механизм по команде компьютера перемещает рабочий орган на центр.
Недостатком этого устройства является сложность и длительность имитации на экране с помощью джойстика формы границ дорожного полотна с учетом перспективы, возможных неровных границ дороги, сужений или расширений ее проезжей части, возможные нарушения согласованности действий водителя, управляющего машиной, и оператора, управляющего форсункой, и т.д.
Известен также способ ориентирования машины для нанесения с помощью рабочего органа на дорогу разметочных полос, при котором машину перед работой устанавливают в начале размечаемого участка на требуемом расстоянии от боковых кромок дороги параллельно оси полосы разметки, затем совмещают ось рабочего органа машины с будущей осью полосы разметки, а при работе ориентируют машину по световому пятну, создаваемому лазерным излучателем и перемещаемому вдоль исходной линии, параллельно которой должна быть проведена данная полоса разметки. В качестве исходной линии может быть использована ось тротуара, ось краевой или соседней полосы разметки или край дороги.
Устройство для реализации этого способа ориентирования включает источник светового излучения, например лазерный излучатель, установленный на крыше кабины с возможностью регулирования угла поворота и наклона его оси для направления светового пятна на исходную линию, параллельно которой должна быть проведена полоса разметки.
Недостатком этого устройства является то, что основная энергия лазерного излучения, отражаясь от дорожного покрытия, направляется в противоположную оператору сторону, что снижает яркость и видимость пятна излучения и требует использования более мощных лазеров и/или размещения светового пятна возможно ближе к разметочной машине. Последнее обстоятельство снижает технологические возможности, особенно в случае разметки широких магистралей, так как чем ближе к разметочной машине пятно излучения, тем больше возможная величина "виляния" разметочной машины. Технологические возможности этого устройства ограничиваются также невозможностью его использования для нанесения полос разметки, не параллельных исходной линии, для разметки дорог, имеющих частые сужения или расширения, неровные края без краевой полосы разметки и т.д. Это устройство нельзя также использовать в машинах для дорожного строительства, которые работают, не имея исходной линии, на которую можно направлять пятно лазерного излучения.
Настоящее изобретение решает задачу расширения технологических возможностей известного способа и устройства для ориентирования, обеспечивает возможность ориентирования дорожных машин различного назначения в различных дорожных условиях. Кроме того, решается задача уменьшения мощности лазерного излучателя, повышения точности ориентирования, уменьшения "виляния" разметочной машины и соответственно уменьшения отклонений от прямолинейности полос разметки.
Решение указанных задач обеспечивается тем, что в известном способе ориентирования дорожных машин, например, при нанесении с помощью рабочего органа машины на дорогу полос разметки, при котором машину перед началом устанавливают в исходное положение, для чего ось рабочего органа совмещают с началом теоретической траектории перемещения оси на данном участке дороги, продольную ось машины устанавливают параллельно этой траектории, а затем при работе ориентируют машину по световому пятну, создаваемому лазерным излучателем, ось излучателя перед началом работы располагают в плоскости разметки вертикальной плоскости, проходящей через упомянутую траекторию, световое пятно направляют на мишень, ось которой также располагают в плоскости разметки, а машину при движении ориентируют так, чтобы световое пятно имело минимальные отклонения от оси мишени.
Решение указанных выше задач обеспечивается также тем, что известное устройство для ориентирования дорожных машин, например, для нанесения с помощью рабочего органа машины на дорогу разметочных полос, включающее лазерный излучатель, установленный на машине с возможностью регулирования угла поворота и наклона его оси, дополнительно снабжено средством для установки перед началом разметки оси лазерного излучателя в одной вертикальной плоскости разметки с осью рабочего органа машины.
Это средство включает поперечину, например, в виде трубы, установленную над кабиной дорожной машины, и охватывающие поперечину хомуты с крепежными элементами, связывающими хомуты с основанием для установки лазерного излучателя. Хомуты могут сдвигаться вдоль оси трубы и поворачиваться вокруг оси поперечины, за счет чего обеспечивается совмещение оси лазерного излучателя с осью рабочего органа машины в одной вертикальной плоскости, а также требуемый угол наклона излучателя. Положение излучателя фиксируется затяжкой на кабине с помощью вторых хомутов, аналогичных первым, и крепежных элементов, затягивающих хомуты на поперечине и связывающих трубу со стойками, опирающимися на отбортовку крыши кабины.
Кроме того, устройство снабжено мишенью для создаваемого излучателем светового пятна, ось которой лежит в вертикальной плоскости разметки, проходящей через оси полосы разметки, излучателя и рабочего органа машины.
Мишень или ее часть покрыта световозвращающим материалом, например пленкой, используемой для изготовления дорожных знаков, флюоресцирующей краской и т. д. При этом мишень может быть установлена стационарно в конце теоретической траектории перемещения рабочего органа дорожной машины на данном участке, что обеспечивает максимальную точность разметки, но требует дополнительного времени на последовательную транспортировку мишени с одного размечаемого участка на другой или дополнительного транспортного средства с мишенью, которое устанавливается в конце следующего размечаемого участка в то время, как производится разметка предыдущего.
В другом варианте изобретения мишень устанавливают на подвижном транспортном средстве и на глаз или по следам старой разметки, или по стыку вновь заасфальтированных полос дороги перемещают ось мишени по траектории, близкой к теоретической траектории движения рабочего органа.
При установке мишени в конце теоретической траектории перемещения рабочего органа для снижения яркости видимого пятна излучения при приближении дорожной машины к мишени и исключения утомления глаз водителя мишень поворачивают вокруг ее вертикальной или горизонтальной оси.
В другом варианте изобретения с той же целью поворачивают в вертикальной плоскости разметки лазерный излучатель.
При установке мишени на транспортном средстве расстояние между дорожной машиной и мишенью при работе поддерживают предпочтительно в пределах 50-200 м. При этом возможные "виляния" ориентируемого на глаз транспортного средства и мишени (200-500 мм) сглаживаются пропорционально расстоянию и трансформируются в меньшие в 25-100 раз отклонения от прямолинейности полосы разметки. Конкретная величина расстояния в указанных выше пределах определяется мощностью излучения лазера, условиями работы (освещенность, наличие частых поворотов дороги, качество световозвращающего материала, из которого изготовлена мишень и т.д.). Небольшой лазер с мощностью излучения всего 10 мВт надежно обеспечивает видимость пятна излучения на мишени, отстоящей от излучателя на расстоянии 150-200 м.
При низких требованиях к прямолинейности или незначительных величинах "виляний" транспортного средства с мишенью возможно снижение нижнего предела расстояния до мишени до 15 м, а при разметке прямолинейных участков дороги большой протяженности увеличение верхнего предела расстояния до мишени до 300 м.
Чтобы облегчить совмещение пятна излучения с мишенью при разметке волнистых участков дороги, устройство в варианте изобретения дополнительно снабжено насадком излучателя, в котором установлено средство развертывания лазерного луча в вертикальной плоскости разметки, выполненное, например, в виде цилиндрической линзы, ось которой перпендикулярна упомянутой плоскости разметки.
Еще в одном варианте изобретения для обеспечения возможности разметки дорог, имеющих неровные края с частыми сужениями и расширениями, устройство дополнительно снабжено насадком излучателя, в котором установлено средство деления луча, выполненное, например, в виде призмы, ребро которой расположено в вертикальной плоскости разметки и обращено к выходному отверстию излучателя.
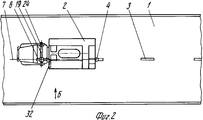
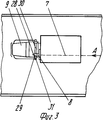
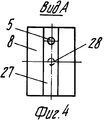
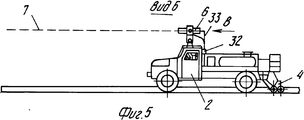
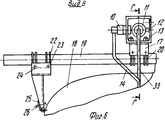
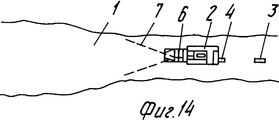
На фиг.1 показана схема ориентирования машины по заявленному способу при нанесении на двухполосную дорогу прерывистой полосы разметки; на фиг.2 - разметочная машина с установленным на крыше кабины лазерным излучателем, вид сверху; на фиг.3 транспортное средство с установленной на крыше кабины мишенью, вид сверху; на фиг. 4 вид по стрелке А на фиг.3; на фиг.5 вид по стрелке Б на фиг.4; на фиг.6 вид по стрелке В на фиг.5; на фиг.7 разрез Г-Г на фиг. 6; на фиг. 8 разрез Д-Д на фиг.7; на фиг.9 излучатель, снабженный средством развертки луча в вертикальной плоскости разметки; на фиг.10 схема хода лучей излучателя, поясняющая принцип развертки; на фиг.11 излучатель, снабженный средством деления луча; на фиг.12 схема хода лучей, поясняющая принцип деления; на фиг.13 вариант использования устройства для ориентирования дорожной машины по бордюру или краевой полосе разметки; на фиг.14 вариант использования устройства ориентирования, снабженного средством деления луча, разметки дорог с неровными краями, сужениями и т.д.
На фиг.1 схематически показана дорога 1 с двумя встречными полосами движения, на которой дорожной машиной 2 наносится полоса разметки 3. Для обеспечения прямолинейности и симметричности полосы разметки относительно боковых кромок дороги машину 2, согласно заявляемому способу, перед работой устанавливают в исходное положение, для чего ось ее рабочего органа, например форсунки 4, совмещают с началом теоретической траектории перемещения оси, т.е. в данном случае серединой дороги, а продольную ось машины 2 устанавливают параллельно этой траектории, т.е. в данном случае параллельно кромкам дороги. Очевидно, что в случае многополосной дороги это может быть не середина, а 1/3, 1/4 и т.д. ширины дороги, а при нанесении косых полос разметки продольная ось машины может быть непараллельна кромкам дорог.
В процессе разметки ориентирование машины 2 на дороге осуществляют по световому пятну 5 (фиг. 4), создаваемому лазерным излучателем 6, установленным на крыше разметочной машины. Для этого ось излучателя 6 перед началом работы располагают в одной вертикальной плоскости разметки с теоретической траекторией движения рабочего органа машины 6, а световой поток 7 излучателя направляют на мишень 8, ось которой также располагают в упомянутой вертикальной плоскости. При движении разметочной машиной управляют таким образом, чтобы отклонения светового пятна 5 от оси мишени 8 были минимальными.
В одном из вариантов осуществления способа мишень 8 устанавливают в конце теоретической траектории перемещения оси рабочего органа стационарно, например, на крыше кабины неподвижно установленного транспортного средства 9. При этом варианте обеспечивается наиболее высокая точность ориентирования, но требуются перерывы в работе для переезда транспортного средства 9 с мишенью 8 и установки его в конце следующего участка разметки после окончания разметки предыдущего или требуется использование двух транспортных средств 9 с мишенями 8 для их последовательной перестановки и обеспечения непрерывности работы машины 2.
При стационарной установке мишени 8 по мере сближения машины 2 и мишени 8 увеличивается видимая яркость наблюдаемого водителем машины 2 светового пятна и количество воспринимаемого глазом лазерного излучения. Чтобы снизить утомляемость водителя, мишень поворачивают в вертикальной или горизонтальной плоскости, увеличивая угол падения светового потока и уменьшения количества отраженного света, воспринимаемого глазом водителя. Тот же результат, но в более ограниченных пределах, может обеспечить сам водитель машины 2, поворачивая ось излучателя в вертикальной плоскости разметки с помощью дистанционного управления электроприводом 10 (фиг. 6, 8) излучателя. Возможно также использование сочетания поворотов мишени и излучателя.
В другом варианте осуществления способа мишень 8 устанавливают на транспортном средстве 9, которое при работе перемещают перед машиной 2 по траектории, близкой к теоретической, с помощью визуального ориентирования. Этот вариант наиболее приемлем для широко распространенных двухполосных дорог, так как человеческий глаз способен довольно точно определить середину дороги, кроме того, могут использоваться для ориентирования сохранившиеся следы старой разметки, стык между полосами вновь уложенного асфальта и т.д. Визуальное ориентирование практически неприемлемо для самой разметочной машины 2, так как возможные "виляния" оси полосы разметки в 200-500 мм легко замечаются глазом и придают дороге неприглядный вид.
Однако, когда мишень 8 движется на транспортном средстве 9 на расстоянии 50-200 м перед разметочной машиной 2, а последняя ориентируется, как это было описано выше, по световому пятну 5, которое водитель машины 2 старается, управляя рулем, удерживать на оси мишени 8, то возможные "виляния" мишени на 200-500 мм трансформируются в 25-100 раз меньше отклонения от прямолинейности оси полосы разметки, которые практически неразличимы глазом. Этот вариант осуществления способа обеспечивает непрерывность процесса разметки при минимальном количестве используемой техники и наименьшую (вследствие значительного удаления водителя от мишени) утомляемость глаз водителя разметочной машины. При разметке дорог с крутыми поворотами расстояние между машинами может уменьшаться до 15 м, а в других случаях увеличиваться до 300 м.
Устройство для ориентирования дорожной машины 2, например для нанесения с помощью рабочего органа 4 (фиг.2, 5) на дорогу полос разметки 3, включает лазерный излучатель 6, установленный на машине в обойме 11 (фиг.6-8), которая снабжена цапфой 12, установленной в отверстии рамки 13, и может поворачиваться в вертикальной плоскости электроприводом 10, связанным проводом 14 с расположенным в кабине водителя пультом управления (не показан). Рамка 13 снабжена отверстием 15, расстояния от которых до оси равны расстояниям до оси отверстий, через которые пропущены болты 16, которые крепят рамки к П-образному основанию 17 для установки лазерного излучателя 6. Основание 17 крепится над кабиной 18 машины 2 к поперечине 19 с помощью хомутов 20 и болтов 21, что позволяет перед началом разметки устанавливать ось лазерного излучателя в одной вертикальной плоскости с осью рабочего органа 4 машины 2, а также поворачивать излучатель в вертикальной плоскости вокруг оси поперечины трубы 19.
Рамка 13 может быть повернута на 90o и закреплена в этом положении болтами 16, пропущенными через отверстия 15. При этом водитель может дистанционно управлять поворотом излучателя в плоскости, параллельной оси поперечины 19, что, как будет показано ниже, существенно расширяет технологические возможности устройства.
Кроме того, возможна шарнирная установка рамки 13 на вертикальной оси, закрепленной на основании 17, и оснащение ее вторым дистанционно управляемым электроприводом, аналогичным электроприводу 10, для дистанционного поворота вокруг двух взаимно перпендикулярных осей.
На краях поперечины 19 установлены вторые хомуты 22 с крепежными элементами 23, связывающими хомуты со стойками 24, которые опираются на отбортовку крышки кабины. Стойки 24 крепятся к отбортовке зажимами 25 и крепежными элементами 26.
Для осуществления описанного выше способа ориентирования устройство дополнительно снабжено мишенью 8, ось которой при стационарной установке лежит в вертикальной плоскости, проходящей через оси полосы разметки, излучателя и рабочего органа машины.
Мишень 8 или ее центральная часть 27 покрыта световозвращающим материалом, например пленкой, используемой для изготовления дорожных знаков. Это позволяет существенно увеличить исходное расстояние от машины 2 до мишени и/или снизить мощность лазерного излучателя 6. Мишень неподвижно соединена с цилиндрическим стержнем 28, который неподвижно закреплен аналогично излучателю 6 в поворотной обойме и рамке 29 с возможностью поворота вокруг горизонтальной или вертикальной оси.
Рамка 29 с мишенью 8 может быть установлена на поперечине 30 над кабиной подвижного транспортного средства с помощью основания и хомутов, аналогичных основанию 17 и хомутам 20 для крепления лазерного излучателя, а поперечина 30 закреплена над кабиной транспортного средства 9 с помощью вторых хомутов и стоек 31, аналогичных хомутам 22 и стойкам 24.
Устройство также снабжено блоком питания 32 излучателя 6, который преобразует напряжение 12 В бортовой сети автомобиля в напряжение в несколько киловольт, которое по кабелю 33 подается к излучателю. Кроме того, в кабине водителя имеется пульт дистанционного управления поворотом излучателя в вертикальной и (или) горизонтальной плоскости (не показан).
На фиг.9 показано дополнительное средство развертки луча в вертикальной плоскости разметки, выполненное в виде насадка 34, снабженного цилиндрической расточкой, охватывающей выходной участок излучателя 6, и перпендикулярным оси расточки отверстием, в котором установлена цилиндрическая линза 35. В качестве средства развертки луча могут также использоваться цилиндрическая трубка, вращающееся зеркало или призма, другие известные средства развертки луча. Принцип развертки луча поясняется схемой на фиг. 10, где связь между углами падения и углами преломления лучей описывается известным соотношением sinα = n•sinβ, где n показатель преломления. Для стекла n 1,3-1,5.
На фиг. 11 показано дополнительное средство деления луча, выполненное в виде насадка 36, снабженного цилиндрической расточкой, охватывающей выходное отверстие излучателя 6. Внутри насадка 36 в перпендикулярном оси излучателя пазу втулки 37 установлена призма 38. Принцип деления луча поясняется схемой на фиг.12, где ход лучей определяется тем же соотношением sinα = n•sinβ.
С помощью призмы 38 или других известных средств деления луча (например, полупрозрачного стекла и зеркала) возможно получение на дорожном покрытии двух пятен излучения, которые при соответствующих углах наклона и поворота излучателя 6 могут быть легко установлены симметрично оси будущей полосы разметки.
Устройство обеспечивает реализацию трех возможных способов ориентирования.
При реализации описанного способа ориентирования "прямой визир", предпочтительного для широких прямых дорог, машину 2 перед работой устанавливают в исходное положение, для чего ось рабочего органа 4 совмещают с началом теоретической траектории перемещения оси, а ось машины устанавливают параллельно этой траектории, т.е. параллельно кромке дороги. При этом предпочтительно, чтобы ось рабочего органа 4 была предварительно установлена на оси рулевой колонки машины. Затем, освободив хомуты 20 крепления излучателя, сдвигают его вдоль поперечины 19 и устанавливают в одной вертикальной плоскости с рабочим органом и упомянутой траекторией. Ось мишени 8 также предпочтительно совмещают в одной вертикальной плоскости с осью рулевой колонки, перемещая мишень при ослабленных хомутах крепления вдоль поперечины 30, а затем вместе с транспортным средством 9 устанавливают так, чтобы мишени оказались в одной вертикальной плоскости с рабочим органом и осью полосы разметки теоретической траекторией движения рабочего органа разметочной машины. При этом включают лазер и контроль правильности исходной установки осуществляют, ориентируясь на взаимное положение излучателя лазера и оси мишени.
После установки излучателя и мишени затягивают хомуты крепления и осуществляют описанный выше способ ориентирования по стационарной или перемещаемой на транспортном средстве мишени. При этом, благодаря наличию на мишени световозвращающего материала, расстояние между разметочной машиной и мишенью поддерживается в пределах 15-300 м (предпочтительно 50-200 м), что при малых отклонениях разметочной машины от теоретической траектории вызывает значительные отклонения пятна излучения от оси мишени, которые своевременно устраняются водителем разметочной машины. Это также минимизирует влияние "виляний" оси мишени при движении ее на транспортном средстве, ориентируемом водителем визуально.
На участках дороги с частыми подъемами и спусками при осуществлении способа ориентирования "прямой визир" водитель разметочной машины должен периодически поворачивать излучатель 6 в вертикальной плоскости так, чтобы пятно излучения 5 находилось в пределах высоты мишени 8. Чтобы уменьшить или полностью исключить необходимость в такой корректировке положения излучателя, предусмотрена возможность установки на излучатель средства развертки луча, выполненного в виде насадка 34 с цилиндрической линзой 35, которая "растягивает" пятно излучения по вертикали и тем самым снижает потребность в корректировках положения излучателя.
Описанное выше устройство обеспечивает также возможность реализации известного способа ориентирования "боковой визир", который предпочтителен для узких и извилистых дорог (фиг. 13).
Для реализации этого способа рамку 13 поворачивают на 90o и закрепляют на основании 17 так, что ось электропривода поворота 10 становится вертикально, основание 17 с ослабленными хомутами 20 сдвигают в наиболее близкое к краевой линии разметке или бордюру 39 положение, наклоняют вперед так, чтобы ось лазерного излучателя 7 пересекала плоскость дороги на расстоянии 5-15 м перед разметочной машиной и затягивают хомуты 20. После этого ось рабочего органа 4 совмещают с теоретической траекторией движения, включают излучатель 6 и, поворачивая его электроприводом 10, совмещают пятно излучения 5 с осью бордюра или краевой полосы разметки. При этом, благодаря смещению излучателя в наиболее близкое к краевой полосе разметки или тротуару положение, обеспечивается минимально возможный угол падения и тем самым максимальная яркость излучения.
В дальнейшем при разметке ориентируют разметочную машину по пятну излучения, не допуская его значительных смещений относительно оси бордюра, краевой или соседней (при многополосной дороге) полосы разметки. Это позволяет расширить технологические возможности устройства.
При установке на излучатель 6 средства деления луча (фиг.11), выполненного в виде насадка 36, снабженного призмой 38, возможно осуществление способа ориентирования "двойной боковой визир", который отличается от "бокового визира" только тем, что ориентирование машины ведут сразу по двум пятнам излучения (фиг.14). Это еще более расширяет технологические возможности устройства, так как позволяет осуществлять разметку дорог, имеющих неровные края, участки с частыми расширениями и сужениями дороги и т.д. используя свойство человеческого глаза довольно точно определять разность расстояний от каждого из пятен излучения до края дороги.
Claims (13)
1. Способ ориентирования дорожных машин, например, при нанесении с помощью рабочего органа машины на дорогу полос разметки, при котором машину перед работой устанавливают в исходное положение, для чего ось рабочего органа совмещают с началом теоретической траектории перемещения оси, а продольную ось машины устанавливают параллельно этой траектории, а затем при работе ориентируют машину по световому пятну, создаваемому лазерным излучателем, отличающийся тем, что световое пятно создают на мишени, расположенной перед разметочной машиной, ось излучателя устанавливают перед началом работы параллельно оси машины так, чтобы световое пятно находилось на оси мишени, а при движении разметочной машины ее рулем ориентируют так, чтобы световое пятно имело минимальное отклонение от оси мишени.
2. Способ по п.1, отличающийся тем, что мишень стационарно устанавливают в конце теоретической траектории перемещения оси рабочего органа на данном участке дороги.
3. Способ по п.2, отличающийся тем, что мишень поворачивают вокруг горизонтальной или вертикальной оси для уменьшения яркости светового пятна по мере приближения машины к мишени.
4. Способ по пп.1 3, отличающийся тем, что излучатель поворачивают в вертикальной плоскости для уменьшения яркости светового пятна по мере приближения машины к мишени.
5. Способ по п.1, отличающийся тем, что мишень устанавливают на транспортном средстве, которое при работе перемещают перед машиной по траектории, близкой к теоретической, с помощью визуального ориентирования.
6. Устройство для ориентирования дорожных машин, например, для нанесения с помощью рабочего органа машины на дорогу полос разметки, включающее лазерный излучатель, установленный на машине с возможностью регулирования угла поворота и наклона его оси, отличающееся тем, что оно дополнительно снабжено средством для установки перед началом разметки оси лазерного излучателя в одной вертикальной плоскости с осью рабочего органа машины.
7. Устройство по п.6, отличающееся тем, что средство установки лазерного излучателя включает поперечину, установленную над кабиной дорожной машины, и охватывающие поперечину первые хомуты с крепежными элементами, связывающими первые хомуты с основанием для установки лазерного излучателя, а также вторые хомуты с крепежными элементами, связывающими вторые хомуты со стойками, опирающимися на отбортовку крыши кабины дорожной машины.
8. Устройство по пп.6 и 7, отличающееся тем, что оно снабжено мишенью для создаваемого излучателем светового пятна, ось которой лежит в вертикальной плоскости разметки, проходящей через оси полосы разметки, излучателя и рабочего органа машины.
9. Устройство по п.8, отличающееся тем, что мишень или ее часть покрыта световозвращающим материалом, например пленкой, используемой для изготовления дорожных знаков.
10. Устройство по пп.8 и 9, отличающееся тем, что мишень установлена с возможностью поворота вокруг горизонтальной и/или вертикальной оси.
11. Устройство по пп.8 10, отличающееся тем, что мишень установлена на подвижном транспортном средстве.
12. Устройство по пп.8 11, отличающееся тем, что оно снабжено средством развертки луча в вертикальной плоскости разметки, выполненным, например, в виде насадка с цилиндрической расточкой, охватывающей выходной участок излучателя, и перпендикулярным оси расточки отверстием, в котором установлена цилиндрическая линза.
13. Устройство по пп.6 и 7, отличающееся тем, что оно снабжено средством деления луча, выполненным, например, в виде насадка с цилиндрической расточкой, охватывающей выходной участок излучателя, и перпендикулярным оси расточки пазом, в котором установлена призма, ребро которой расположено в вертикальной плоскости и обращено к выходному отверстию излучателя.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU95106241A RU2100521C1 (ru) | 1995-04-12 | 1995-04-12 | Способ ориентирования и устройство для ориентирования дорожных машин |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU95106241A RU2100521C1 (ru) | 1995-04-12 | 1995-04-12 | Способ ориентирования и устройство для ориентирования дорожных машин |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU95106241A RU95106241A (ru) | 1997-01-27 |
| RU2100521C1 true RU2100521C1 (ru) | 1997-12-27 |
Family
ID=20166996
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU95106241A RU2100521C1 (ru) | 1995-04-12 | 1995-04-12 | Способ ориентирования и устройство для ориентирования дорожных машин |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2100521C1 (ru) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103452034A (zh) * | 2013-09-05 | 2013-12-18 | 山东理工大学 | 交通标志线智能划线系统 |
| RU2602290C2 (ru) * | 2014-10-21 | 2016-11-20 | Акционерное общество "Научно-исследовательский институт "Экран" (АО "НИИ "Экран") | Способ ориентации по лазерному лучу и устройство для его реализации |
| RU2607723C2 (ru) * | 2015-02-20 | 2017-01-10 | Акционерное общество "Научно-исследовательский институт "Экран" | Способ ориентации по лазерному лучу |
| RU2664033C1 (ru) * | 2017-03-28 | 2018-08-14 | Федеральное государственное автономное образовательное учреждение высшего образования "Санкт-Петербургский государственный университет аэрокосмического приборостроения" (ГУАП) | Способ автоматического группового вождения дорожных машин и система для его осуществления |
-
1995
- 1995-04-12 RU RU95106241A patent/RU2100521C1/ru active
Non-Patent Citations (1)
| Title |
|---|
| WO, заявка, 90/12922, кл. E 01 C 23/16, 1990. US, патент, 5052854, кл. E 01 C 9/08, 1991. * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103452034A (zh) * | 2013-09-05 | 2013-12-18 | 山东理工大学 | 交通标志线智能划线系统 |
| CN103452034B (zh) * | 2013-09-05 | 2015-08-12 | 山东理工大学 | 交通标志线智能划线系统 |
| RU2602290C2 (ru) * | 2014-10-21 | 2016-11-20 | Акционерное общество "Научно-исследовательский институт "Экран" (АО "НИИ "Экран") | Способ ориентации по лазерному лучу и устройство для его реализации |
| RU2607723C2 (ru) * | 2015-02-20 | 2017-01-10 | Акционерное общество "Научно-исследовательский институт "Экран" | Способ ориентации по лазерному лучу |
| RU2664033C1 (ru) * | 2017-03-28 | 2018-08-14 | Федеральное государственное автономное образовательное учреждение высшего образования "Санкт-Петербургский государственный университет аэрокосмического приборостроения" (ГУАП) | Способ автоматического группового вождения дорожных машин и система для его осуществления |
Also Published As
| Publication number | Publication date |
|---|---|
| RU95106241A (ru) | 1997-01-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3587667B1 (de) | Strassenfertiger mit projektor als navigationshilfe | |
| US4247870A (en) | Highway premarking guidance system | |
| US5052854A (en) | Highway guidance vehicle systems | |
| KR100243073B1 (ko) | 아스팔트 휘니셔용 자동조향장치 | |
| JP6972549B2 (ja) | Hud装置、車両装置及び表示方法 | |
| EP3165403B1 (de) | Verfahren zum steuern einer scheinwerferanordnung für ein fahrzeug | |
| GB2517790A (en) | Vehicle with system for imaging | |
| EP0552015B1 (en) | Means and method for highly controllable lighting | |
| RU2100521C1 (ru) | Способ ориентирования и устройство для ориентирования дорожных машин | |
| EP3018007A2 (de) | Verfahren zum steuern einer scheinwerferanordnung für ein fahrzeug und scheinwerferanordnung | |
| US20040111901A1 (en) | Laser device for guiding a vehicle | |
| EP0583321B1 (en) | A vehicle for the measuring and marking of points and/or lines on a road | |
| KR102409259B1 (ko) | 차선 도색차량용 차선 안내장치 | |
| WO2023083629A1 (de) | Scheinwerfer für fahrzeuge sowie projektionsverfahren | |
| JPH09219102A (ja) | 道路区分表示機 | |
| US8382394B1 (en) | Device for applying reflective paint to roadside barriers | |
| KR20160063780A (ko) | 노면표시 생성 장치 | |
| DE102019112630A1 (de) | Optische Vorrichtung, Fahrzeug, Scheinwerfer und Verfahren | |
| KR20060107253A (ko) | 착시현상을 이용한 가상 과속방지턱 | |
| JP7273380B2 (ja) | 車線規制方法 | |
| US2803160A (en) | Sighting device | |
| DE102018220813B4 (de) | Fahrzeug, das in der lage ist, informationen auf strassen anzuzeigen und steuerungsverfahren dafür | |
| KR20240156119A (ko) | 헤드업디스플레이가 적용된 차선 도색 시스템 | |
| JPH0523603Y2 (ru) | ||
| JPH07103760A (ja) | 道路区画予定線指示装置 |