RU2024970C1 - Манипулятор для доставки рабочих органов - Google Patents
Манипулятор для доставки рабочих органов Download PDFInfo
- Publication number
- RU2024970C1 RU2024970C1 SU925021116A SU5021116A RU2024970C1 RU 2024970 C1 RU2024970 C1 RU 2024970C1 SU 925021116 A SU925021116 A SU 925021116A SU 5021116 A SU5021116 A SU 5021116A RU 2024970 C1 RU2024970 C1 RU 2024970C1
- Authority
- RU
- Russia
- Prior art keywords
- link
- manipulator
- hinge
- platform
- housing
- Prior art date
Links
Images

Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E30/00—Energy generation of nuclear origin
- Y02E30/30—Nuclear fission reactors
Landscapes
- Manipulator (AREA)
Abstract
Использование: в машиностроении, судостроении, энергетике, химической промышленности, робототехнике и других отраслах промышленности для доставки рабочих органов при ремонте, инспекции и других работах, выполняемых в труднодоступных местах. Сущность изобретения: манипулятор содержит корпус 1, механизм 2 перемещения, площадку 3 для крепления рабочих органов и механизм 4 ориентации с четырехзвенным шарнирным механизмом. В четырехзвенном шарнирном механизме длины трех звеньев выполнены постоянными, а длина четвертого звена-переменной. На шарнире четвертого звена выполнен зубчатый венец, контактирующий с зубчатой рейкой. Рейка выполнена с возможностью перемещения совместно с шарниром и раздельно. Используя различные соотношения длин звеньев шарнирного механизма, возможно расположить площадку 3 в любом заданном положении. 3 ил.
Description
Изобретение относится к устройствам для ремонта, инспекции и проведения измерительных работ в труднодоступных местах с агрессивными средами, в частности к манипуляторам для доставки рабочих органов во внутренние полости реакторного оборудования.
Известна система доставки дистанционного датчика, дающая возможность фиксировать датчик в 2-х определенных положениях. Система состоит из удлиненного корпуса, один конец которого приспособлен для манипулирования, второй снабжен поворотным рычагом для размещения на нем датчиков [1].
Известен манипулятор для доставки рабочих органов, содержащий корпус, механизм перемещения, механизм ориентации с четырехзвенным шарнирным механизмом и площадку для крепления рабочих органов [2].
Данные известные решения при доставке рабочих органов в корпус реактора или другую полость не обеспечивают ориентирования их в любом заданном направлении, а обеспечивают определенное их расположение.
Целью изобретения является расширение эксплуатационных возможностей.
Указанная цель достигается тем, что манипулятор для доставки рабочих органов содержит корпус, механизм перемещения, площадку для крепления рабочих органов, механизм ориентации с четырехзвенным шарнирным механизмом, в котором одно звено переменной длины, на шарнире которого выполнен зубчатый венец, контактирующий с зубчатой рейкой, имеющей возможность перемещаться совместно с шарниром и раздельно.
Меняя длину звена и вращая зубчатый венец, рабочий орган может быть ориентирован в любом заданном направлении.
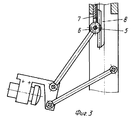
На фиг.1 показан общий вид манипулятора, установленного на реактор; на фиг.2 и 3 - положения механизма ориентации.
Манипулятор для доставки рабочих органов во внутреннюю полость реактора содержит корпус 1, механизм 2 перемещения, площадку 3 для крепления рабочих органов и механизм 4 ориентации. Механизм 4 ориентации имеет четырехзвенный шарнирный механизм с подвижным шарниром 5, на котором расположен зубчатый венец 6, жестко связанный со звеном шарнирного механизма. Перемещение шарнира 5 осуществляется штангой 7, а поворот зубчатого венца 6 - рейкой 8.
Манипулятор работает следующим образом.
Манипулятор устанавливается на реактор и, используя механизм 2 перемещения, производится поворот площадки 3 относительно оси корпуса 1 и ее вертикальное перемещение на заданную величину. В исходном положении длина взаимно противоположных звеньев шарнирного механизма одинакова, и, вращая маховик 9, приводим в действие рейку 8, которая, перемещаясь, производит поворот зубчатого венца 6 и связанного с ним звена относительно шарнира 5, при этом происходит смещение площадки 3 от оси корпуса 1 без ее разворота (фиг.2). Вращая маховик 10, приводим в действие штангу 7 с установленным на ней шарниром 5 вдоль оси корпуса и зубчатую рейку 8, при этом изменяется длина одного звена шарнирного механизма, и происходит разворот площадки 3 при незначительном перемещении ее от оси корпуса 1 (фиг.3).
Используя различные соотношения длин звеньев шарнирного механизма, возможно расположить площадку 3 в любом заданном положении.
Манипулятор позволяет выполнять доставку рабочих органов в труднодоступные места и ориентировать их в любом заданном направлении, т.е. расширяет эксплуатационные возможности.
Claims (1)
- МАНИПУЛЯТОР ДЛЯ ДОСТАВКИ РАБОЧИХ ОРГАНОВ, содержащий корпус, механизм перемещения, механизм ориентации с четырехзвенным шарнирным механизмом и площадку для крепления рабочих органов, отличающийся тем, что в четырехзвенном шарнирном механизме длины трех звеньев выполнены постоянными, а длина четвертого звена - переменной, причем на его шарнире выполнен зубчатый венец, контактирующий с дополнительно введенной зубчатой рейкой, выполненной с возможностью перемещения совместно с шарниром и раздельно.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU925021116A RU2024970C1 (ru) | 1992-01-09 | 1992-01-09 | Манипулятор для доставки рабочих органов |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU925021116A RU2024970C1 (ru) | 1992-01-09 | 1992-01-09 | Манипулятор для доставки рабочих органов |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2024970C1 true RU2024970C1 (ru) | 1994-12-15 |
Family
ID=21593886
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU925021116A RU2024970C1 (ru) | 1992-01-09 | 1992-01-09 | Манипулятор для доставки рабочих органов |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2024970C1 (ru) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2815268C1 (ru) * | 2023-07-31 | 2024-03-12 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" (Госкорпорация "Росатом") | Манипулятор для сборки пучка тепловыделяющих элементов |
-
1992
- 1992-01-09 RU SU925021116A patent/RU2024970C1/ru active
Non-Patent Citations (2)
| Title |
|---|
| 1. Патент США N 4689994, кл. G 01N 29/00, 1987. * |
| 2. Уордсуорт А.Д. Техника работы с ядерным топливом, - М.; Атомиздат, 1965, с.146-148, рис.21.13. * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2815268C1 (ru) * | 2023-07-31 | 2024-03-12 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" (Госкорпорация "Росатом") | Манипулятор для сборки пучка тепловыделяющих элементов |
| RU235512U1 (ru) * | 2024-12-27 | 2025-07-04 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский государственный технологический университет "СТАНКИН" (ФГБОУ ВО "МГТУ "СТАНКИН") | Монорельсовый триптерон |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4235931B2 (ja) | パラレルリンクロボット | |
| CA1210421A (en) | Split-ball type wrist and manipulator assembly for robot | |
| US4805477A (en) | Multiple joint robot part | |
| EP0279591B1 (en) | Robotic manipulator | |
| US4651589A (en) | Polyarticulated retractile mechanism | |
| EP0086054B1 (en) | Industrial robots, and arm assemblies and drive apparatus therefor | |
| US5098024A (en) | Spray end effector | |
| US4507043A (en) | Counterbalance robot arm | |
| US4501522A (en) | Manipulator | |
| US6324934B1 (en) | Robot arm | |
| US7086307B2 (en) | Parallel control arm with two branches | |
| US4585387A (en) | Robot arm | |
| US4624621A (en) | Wrist mechanism for industrial robots and the like | |
| GB2454721A (en) | Controlling the translation and orientation of a moveable platform with six-degrees-of--freedom | |
| CA2053483A1 (en) | Industrial robot with wrist actuator mechanism | |
| JPH01150042A (ja) | マニピュレータ関節機構 | |
| US4752094A (en) | Robot gripper or hand device | |
| RU2024970C1 (ru) | Манипулятор для доставки рабочих органов | |
| CN100368162C (zh) | 多关节操作杆 | |
| SE8800313L (sv) | Lastoeverfoeringsanordning foer elektromekaniska maetgivare | |
| SU1444141A1 (ru) | Промышленный робот | |
| SU1587403A1 (ru) | Установка дл усталостных испытаний образцов материалов | |
| SU1074709A1 (ru) | Механическа рука | |
| JPH0418791Y2 (ru) | ||
| SU1364468A1 (ru) | Манипул тор |