RU2017103C1 - Устройство для определения инерционных характеристик изделия - Google Patents
Устройство для определения инерционных характеристик изделия Download PDFInfo
- Publication number
- RU2017103C1 RU2017103C1 SU4883317A RU2017103C1 RU 2017103 C1 RU2017103 C1 RU 2017103C1 SU 4883317 A SU4883317 A SU 4883317A RU 2017103 C1 RU2017103 C1 RU 2017103C1
- Authority
- RU
- Russia
- Prior art keywords
- product
- axis
- faceplate
- platform
- mass
- Prior art date
Links
- 230000000694 effects Effects 0.000 abstract description 2
- 238000011089 mechanical engineering Methods 0.000 abstract description 2
- 239000000126 substance Substances 0.000 abstract 1
- 230000010355 oscillation Effects 0.000 description 16
- 238000005259 measurement Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 3
- 101100234408 Danio rerio kif7 gene Proteins 0.000 description 2
- 101100221620 Drosophila melanogaster cos gene Proteins 0.000 description 2
- 101100398237 Xenopus tropicalis kif11 gene Proteins 0.000 description 2
- 230000003534 oscillatory effect Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 230000014509 gene expression Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 230000008092 positive effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images



Landscapes
- Vibration Prevention Devices (AREA)
Abstract
Использование: для определения инерционных характеристик деталей. В устройстве имеется возможность поворота планшайбы относительно первой оси, совпадающей с осью платформы, и относительно оси, расположенной под углом к первой оси. 5 ил.
Description
Изобретение относится к машиностроению и может быть использовано для определения инерционных характеристик изделий.
Наиболее близким по технической сущности к изобретению является устройство, содержащее установленный на основании корпус, размещенную в нем колебательную систему, выполненную в виде платформы, связанной торсионом с корпусом, планшайбу для закрепления изделия и узел поворота планшайбы относительно оси, параллельной оси платформы. С помощью этого устройства можно определить массу, две координаты центра масс и момент инерции относительности, проходящей через центр масс изделия.
Недостатком устройств является сравнительная ограниченность технологических возможностей, так как с его помощью невозможно определить третью координату центра масс и центральный эллипсоид инерции изделия.
Цель изобретения - расширение эксплуатационных возможностей устройства для определения инерционных характеристик изделия.
Поставленная цель достигается тем, что устройство для определения инерционных характеристик изделия, содержащее установленный на основании корпус, размещенную в нем колебательную систему, выполненную в виде платформы, связанной торсионом с корпусом, планшайбу для закрепления изделия и узел поворота планшайбы относительно вертикальной оси, параллельной оси платформы. Новым является то, что устройство снабжено дополнительным узлом поворота планшайбы относительно наклонной оси, расположенным между платформой и основным узлом поворота планшайбы, а сама планшайба выполнена поворотной относительно оси, совпадающей с осью платформы.
Предложенная совокупность признаков обеспечивает возможность дополнительно определять третью координату центра масс изделия и центральный эллипсоид инерции, что создает положительный эффект.
Проведенный поиск по патентной и научно-технической литературе не выявил технических решений с аналогичной совокупностью отличительных признаков.
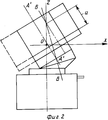
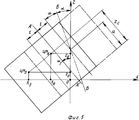
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - то же, после поворота планшайбы на 180о с помощью дополнительного узла поворота; на фиг. 3 и 4 - положения проекций центра масс на горизонтальную плоскость при различных углах поворота планшайбы с помощью основного и дополнительного узлов поворота; на фиг. 5 - фронтальные проекции центра масс при наклонном положении изделия.
Устройство содержит установленный на основание корпус 1, размещенную в нем колебательную систему, выполненную в виде платформы 2, связанной торсионом 3 с корпусом 1, поворотную относительно оси планшайбу 4 для закрепления изделия 5, узел поворота 6 планшайбы 4 относительно вертикальной оси А-А, параллельной оси О платформы 2, и дополнительный узел поворота 7 планшайбы 4 относительно наклонной оси Б-Б, размещенный между платформой 2 и основным узлом поворота 6.
Устройство для определения инерционных характеристик изделия работает следующим образом.
По трубопроводу 8 в зазор между корпусом 1 и платформой 2 подается сжатый воздух, обеспечивающий газовую смазку с малым коэффициентом трения между корпусом 1 и платформой 2. На планшайбе 4 крепится изделие 5 (фиг. 1). Платформу 2 принудительно закручивают на угол 1-5оотносительно оси OZ и отпускают. Платформа 2 вместе с изделием 5 начинает совершать свободные колебания. Измеряют период колебаний Т1-. Затем с помощью основного узла поворота 6 поворачивают планшайбу 4 с изделием 5 на 90о вокруг оси А-А по ходу часовой стрелки. Таким образом изделие, изменяя положение относительно оси колебаний, не меняет пространственной угловой ориентации, т.е. перемещается поступательно относительно оси колебаний. В этом положении измеряют период колебаний Т2. Затем измеряют период колебаний Т3, после дальнейшего поворота планшайбы 4 с помощью основного узла поворота 6 еще на 90о и разворота изделия в обратную сторону на 90о и после этого измеряют период колебаний Т4 после дальнейших аналогичных поворотов планшайбы 4 и изделия 5.
На фиг. 3 схематически показаны проекции центра масс изделия (ЦМ) и контуры сечения изделия (круг) в четырех описанных положениях изделия.
После описанных операций с помощью дополнительного узла поворота 7 изделие приводят в наклонное положение (фиг. 2) и измеряют период колебаний Т5. Затем производят поворот планшайбы 4 с изделием на 180о с помощью основного узла поворота 6 и разворачивают изделие на планшайбе 4 на 180о вокруг своей оси. При этом изделие займет положение, показанное на фиг. 2 пунктиром. Производят в этом положении измерение периода колебаний Т6.
На фиг. 3 схематически показаны проекции центра масс изделия и контура центрального сечения изделия в двух последних наклонных положениях изделия.
После этого производят еще три измерения периодов колебаний Т7, Т8и Т9 после разворота изделия на планшайбе 4 вокруг собственной оси на углы, соответственно, 45, 45 и 180о. Последние три угла могут быть произвольными, но с учетом минимума погрешностей при вычислениях указанные углы оптимальны (в этом можно убедиться с помощью известных методов статического моделирования процесса определения инерционных характеристик с помощью описываемого алгоритма на ЭВМ). Из тех же соображений угол наклона оси Б-Б должен быть равен 22,5о, хотя он тоже может быть равен производным в интервале 0-45о. Выбор угла α на практике может ограничиваться габаритами и жесткостью конструкции изделия.
Применяя известные зависимости между моментом инерции унифилярного маятника, которым является предлагаемое устройство, и периодом его колебаний (Гернет М. М. и Ратобыльский В.Ф. Определение моментов инерции. М.: Машиностроение, 1969, с. 69), и введя обозначение K =  , где С - жесткость торсиона, можно записать уравнение
, где С - жесткость торсиона, можно записать уравнение
Ii=kTi 2 , где i - номер измерения периода колебаний,
Ii - соответствующий момент инерции колебательной системы, относительно оси OZ.
Ii=kTi 2 , где i - номер измерения периода колебаний,
Ii - соответствующий момент инерции колебательной системы, относительно оси OZ.
При первых четырех измерениях изделие не изменяет своей угловой пространственной ориентации относительно оси колебаний, поэтому можно записать
I01 + I1 + m (x1 2 + y1 2) = kT1 2,
I02 + I1 + m (x2 2 + y2 2) = kT2 2,
I03 + I1 + m (x3 2 + y3 2) = kT3 2,
I04 + I1 + m (x4 2 + y4 2) = kT4 2, I01 - момент инерции колебательной системы без изделия при соответствующем измерении периода колебаний;
I1 - момент инерции изделия относительно оси, проходящей через центр масс изделия и параллельной оси колебаний;
m - масса изделия;
xi и yi - координаты центра масс изделия;
(xi 2 + yi 2) - квадрат расстояния между центральной осью и осью колебаний.
I01 + I1 + m (x1 2 + y1 2) = kT1 2,
I02 + I1 + m (x2 2 + y2 2) = kT2 2,
I03 + I1 + m (x3 2 + y3 2) = kT3 2,
I04 + I1 + m (x4 2 + y4 2) = kT4 2, I01 - момент инерции колебательной системы без изделия при соответствующем измерении периода колебаний;
I1 - момент инерции изделия относительно оси, проходящей через центр масс изделия и параллельной оси колебаний;
m - масса изделия;
xi и yi - координаты центра масс изделия;
(xi 2 + yi 2) - квадрат расстояния между центральной осью и осью колебаний.
Учитывая геометрические соотношения (фиг. 3) между координатами центра масс изделия при различных положениях изделия:
x2 = x1 + l,
y2 = y1 + l,
x3 = x1 + 2l,
y3 = y1,
x4 = x1 + l,
y4 = y1 - l, из системы четырех уравнений найдем:
Xl=X4= - l, (1)
- l, (1)
Yl=Y1= , (2) где
, (2) где
m = [k(T
[k(T +T -T -T )-I03-I01+I02+I04]. (3)
При пятом и шестом измерениях изделие также не изменяет своей угловой пространственной ориентации относительно оси колебаний. Запишем аналогично:
I05 + I2 + m (x5 2 + y5 2) = kT5 2,
I06 + I2 + m (x6 2 + y6 2) = kT6 2
Учитывая геометрические соотношения (фиг. 4 и 5),
x5 = [x1 + 2l + (Zl-d) tg2α ] cos2 α
y5 = y1,
x6 = [x1 + (Zl-d) tg2 α ] cos2 α ,
y6 = y1, где Zl-вертикальная координата центра масс изделия;
d - расстояние от рабочей поверхности планшайбы до точки пересечения осей OZ и Б-Б.
x2 = x1 + l,
y2 = y1 + l,
x3 = x1 + 2l,
y3 = y1,
x4 = x1 + l,
y4 = y1 - l, из системы четырех уравнений найдем:
Xl=X4=
Yl=Y1=
m =
При пятом и шестом измерениях изделие также не изменяет своей угловой пространственной ориентации относительно оси колебаний. Запишем аналогично:
I05 + I2 + m (x5 2 + y5 2) = kT5 2,
I06 + I2 + m (x6 2 + y6 2) = kT6 2
Учитывая геометрические соотношения (фиг. 4 и 5),
x5 = [x1 + 2l + (Zl-d) tg2α ] cos2 α
y5 = y1,
x6 = [x1 + (Zl-d) tg2 α ] cos2 α ,
y6 = y1, где Zl-вертикальная координата центра масс изделия;
d - расстояние от рабочей поверхности планшайбы до точки пересечения осей OZ и Б-Б.
Из системы двух уравнений найдем:
Zl =

 -X
-X -l
-l +d .
+d .
Zl =
Для того, чтобы определить центральный эллипсоид инерции, определяется сначала эллипсоид инерции изделия в точке, совпадающей с точкой пересечения осей OZ и Б-Б при измерениях с номерами 1 = 1, 6, 7, 8, 9, 10. Определение эллипсоида инерции производится по известной методике после того, как будут найдены коэффициенты уравнения эллипсоида инерции:
Ix x2 + Iy y2 + Iz Z2-2Iyz yz-2 Izx zx-2Ixy xy = 1.
Ix x2 + Iy y2 + Iz Z2-2Iyz yz-2 Izx zx-2Ixy xy = 1.
С помощью теоремы Гюйгенса о параллельных осях найдем выражения для коэффициентов центрального эллипсоида инерции:
Ix l = Ix-m (yl 2 + Z ),
),
Iy l = Iy-m (xl 2 + Z ),
),
Iy l = Iz-m (xl 2 + yl 3),
Iyz l = Iyz-m yl Zl
Izx l = Izx-m Zl xl,
Ixy l = Ixy-m xl yl.
Ix l = Ix-m (yl 2 + Z
Iy l = Iy-m (xl 2 + Z
Iy l = Iz-m (xl 2 + yl 3),
Iyz l = Iyz-m yl Zl
Izx l = Izx-m Zl xl,
Ixy l = Ixy-m xl yl.
Окончательно уравнение центрального эллипсоида инерции записывается с учетом зависимостей
Ix lx2 + Iy ly2 + Iz lZ2-2Iyz lyz-2Izx lZx-2Ixy lxy = 1.
Ix lx2 + Iy ly2 + Iz lZ2-2Iyz lyz-2Izx lZx-2Ixy lxy = 1.
Таким образом, использование предлагаемого устройства для определения инерционных характеристик по сравнению с прототипом позволяет дополнительно определить третью координату центра масс изделия и центральный эллипсоид инерции за счет того, что планшайба устройства выполнена поворотной относительно оси, совпадающей с осью платформы. Между планшайбой и основным узлом поворота размещен дополнительный узел поворота планшайбы относительно наклонной оси, что создает технико-экономический эффект.
Claims (1)
- УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК ИЗДЕЛИЯ, содержащее основание, установленный на нем корпус, размещенную в нем платформу, связывающий корпус и платформу торсион, планшайбу для закрепления изделия и узел поворота планшайбы, отличающееся тем, что, с целью расширения эксплуатационных возможностей, планшайба установлена с возможностью поворота относительно первой оси, совпадающей с осью платформы, и относительно оси, расположенной под углом к первой оси.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4883317 RU2017103C1 (ru) | 1990-11-20 | 1990-11-20 | Устройство для определения инерционных характеристик изделия |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SU4883317 RU2017103C1 (ru) | 1990-11-20 | 1990-11-20 | Устройство для определения инерционных характеристик изделия |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2017103C1 true RU2017103C1 (ru) | 1994-07-30 |
Family
ID=21545686
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU4883317 RU2017103C1 (ru) | 1990-11-20 | 1990-11-20 | Устройство для определения инерционных характеристик изделия |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2017103C1 (ru) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2480726C1 (ru) * | 2011-11-30 | 2013-04-27 | Федеральное Государственное Унитарное Предприятие "Научно-Производственное Объединение "Техномаш" | Способ определения моментов инерции изделия и устройство для его осуществления |
| RU2683800C2 (ru) * | 2017-03-31 | 2019-04-02 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" | Комплекс для определения инерционных характеристик с измерительной системой |
| RU2697442C2 (ru) * | 2017-09-13 | 2019-08-14 | Федеральное государственное унитарное предприятие "Комбинат "Электрохимприбор" (ФГУП "Комбинат "Электрохимприбор") | Устройство для определения инерционных характеристик протяженных изделий |
-
1990
- 1990-11-20 RU SU4883317 patent/RU2017103C1/ru active
Non-Patent Citations (1)
| Title |
|---|
| Авторское свидетельство СССР N 1130752, кл. G 01M 1/10, 1983. * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2480726C1 (ru) * | 2011-11-30 | 2013-04-27 | Федеральное Государственное Унитарное Предприятие "Научно-Производственное Объединение "Техномаш" | Способ определения моментов инерции изделия и устройство для его осуществления |
| RU2683800C2 (ru) * | 2017-03-31 | 2019-04-02 | Российская Федерация, от имени которой выступает Государственная корпорация по атомной энергии "Росатом" | Комплекс для определения инерционных характеристик с измерительной системой |
| RU2697442C2 (ru) * | 2017-09-13 | 2019-08-14 | Федеральное государственное унитарное предприятие "Комбинат "Электрохимприбор" (ФГУП "Комбинат "Электрохимприбор") | Устройство для определения инерционных характеристик протяженных изделий |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Rolland et al. | A survey of tracking technologies for virtual environments | |
| US7640786B2 (en) | Self-calibrating accelerometer | |
| Goodman et al. | Effect of finite rotations on gyroscopic sensing devices | |
| JPH01503335A (ja) | 単一の揺動軸を有する多軸角速度検出器 | |
| CN111678538A (zh) | 一种基于速度匹配的动态水平仪误差补偿方法 | |
| JP4294979B2 (ja) | 慣性装置のミスアライメント計測方法 | |
| CN108917788B (zh) | 一种惯性平台系统加速度计动态精度的测试方法和系统 | |
| RU2017103C1 (ru) | Устройство для определения инерционных характеристик изделия | |
| Zhuravlev et al. | The generalized Foucault pendulum is a 3D integrating gyroscopes using the three-dimensional precession of standing waves in a rotating spherically symmetric elastic solid | |
| JPH11211474A (ja) | 姿勢角検出装置 | |
| US20050217127A1 (en) | Measurement device and method for determining the three-dimensional orientation of a body relative to two horizontal reference directions | |
| JP6477214B2 (ja) | 傾斜度測定方法及び装置並びに電子機器及びプログラム | |
| JACKSON | Continuous calibration and alignment techniques for an all-attitude inertial platform | |
| SU481769A1 (ru) | Способ определени широты местонахождени | |
| Flynn | A Discussion of Coning Errors Exhibited by Inertial Navigation Systems. | |
| RU2186337C2 (ru) | Устройство для измерения взаимного углового положения отражателей | |
| SU1046633A1 (ru) | Способ определени центрального момента инерции и координат центра масс в заданной плоскости и массы тела | |
| RU2138018C1 (ru) | Способ выработки навигационных параметров и вертикали места | |
| Doronin et al. | Operation principle and basic errors of vibratory gyroscopes as rotation angle measuring device | |
| RU23974U1 (ru) | Микромеханический гироскоп | |
| RU2674572C1 (ru) | Бесплатформенная инерциальная навигационная система для высокоскоростного маневренного объекта | |
| RU2180134C2 (ru) | Манипулятор "черепаха прохорова" | |
| SU1641457A1 (ru) | Виброизмерительный преобразователь | |
| Veškrna | Positioning system for small devices using principles of inertial navigation system | |
| RU2168208C2 (ru) | Трехкоординатный манипулятор графической информации "черепаха" на базе однокоординатных датчиков |