KR20240136498A - 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 - Google Patents
휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 Download PDFInfo
- Publication number
- KR20240136498A KR20240136498A KR1020230029260A KR20230029260A KR20240136498A KR 20240136498 A KR20240136498 A KR 20240136498A KR 1020230029260 A KR1020230029260 A KR 1020230029260A KR 20230029260 A KR20230029260 A KR 20230029260A KR 20240136498 A KR20240136498 A KR 20240136498A
- Authority
- KR
- South Korea
- Prior art keywords
- jerk
- wheel slip
- torque
- driving motor
- slip amount
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/20—Reducing vibrations in the driveline
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/107—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/10—Interpretation of driver requests or demands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0001—Details of the control system
- B60W2050/0002—Automatic control, details of type of controller or control system architecture
- B60W2050/0004—In digital systems, e.g. discrete-time systems involving sampling
- B60W2050/0005—Processor details or data handling, e.g. memory registers or chip architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/081—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/26—Wheel slip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/92—Hybrid vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 장치는, 프로세서; 및 프로세서에 의해 실행 가능하도록 구성된 하나 이상의 프로그램을 기록한 저장 매체를 포함하며, 하나 이상의 프로그램은 구동 모터의 속도와 구동 모터의 모델 속도로부터 구동 모터의 진동 성분을 구하는 제1 모듈과, 구동 모터의 진동 성분에 곱해질 안티 저크 이득 - 안티 저크 이득의 부호는 마이너스임 - 을 구하는 제2 모듈과, 안티 저크 이득을 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하는 제3 모듈을 구현하기 위한 명령들을 포함하며, 제2 모듈은 가속시 구동 모터의 진동 성분이 음수이거나 또는 감속시 구동 모터의 진동 성분이 양수이면, 휠 슬립량을 반영하여 안티 저크 이득을 구할 수 있다.
Description
본 출원은, 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체에 관한 것이다.
가솔린, 디젤, 하이브리드, 및 전기 자동차 등 모든 자동차는 엔진이나 구동 모터의 토크 소스나 외란에 의해서 토크가 변화할 때, 차량 구동축이 강체가 아닌 탄성체이므로 진동이 발생하게 된다.
이러한 진동은 차량의 운전성(drivability)을 저해하기 때문에 차량의 상품성 향상을 위해 제거해야 한다. 특히 토크 컨버터와 같은 댐핑(Damping) 요소가 없는 하이브리드 자동차나 전기 자동차와 같은 친환경 차량은 진동에 더 취약하므로 기존 가솔린이나 디젤 차량에 적용되는 안티 저크(Anti-Jerk) 로직보다 더 최적화된 로직의 적용이 필요하다.
종래 친환경 차량에 적용되는 진동 억제 방법으로 모델 속도를 기준으로 산출된 안티 저크 토크를 이용하여 구동 모터의 출력 토크를 제어하는 방법이 있다.
즉, 종래의 진동 억제 방법은 구동 모터의 속도와 모델 속도로부터 구동 모터의 진동 성분을 추출하고, 추출된 구동 모터의 진동 성분에 이득(gain)을 곱하여 안티 저크 토크를 구한다. 이후 안티 저크 토크를 운전자 요구 토크에 더함으로써 출력 토크를 구하며, 이렇게 구한 출력 토크를 구동 모터에 인가함으로써 진동을 억제한다.
하지만, 차량의 가속시에 양의 안티 저크 토크가 운전자 요구 토크에 더해지거나 또는 차량의 감속시에 음의 안티 저크 토크가 운전자 요구 토크에 더해질 경우에는 불필요한 휠 슬립을 발생시키며, 발생된 휠 슬립은 진동을 더욱 악화시킬 수 있다.
본 발명의 일 실시 형태에 의하면, 가속시 또는 감속시 차량에 발생되는 진동을 억제할 수 있는 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체를 제공한다.
본 발명의 일 실시 형태에 의하면, 휠 슬립량을 이용한 안티 저크 토크 연산 장치에 있어서, 상기 안티 저크 토크 연산 장치는, 프로세서; 및 상기 프로세서에 의해 실행 가능하도록 구성된 하나 이상의 프로그램을 기록한 저장 매체를 포함하며, 상기 하나 이상의 프로그램은, 구동 모터의 속도와 상기 구동 모터의 모델 속도로부터 상기 구동 모터의 진동 성분을 구하는 제1 모듈; 상기 구동 모터의 진동 성분에 곱해질 안티 저크 이득 - 상기 안티 저크 이득의 부호는 마이너스임 - 을 구하는 제2 모듈; 및 상기 안티 저크 이득을 상기 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하는 제3 모듈을 구현하기 위한 명령들을 포함하며, 상기 제2 모듈은, 가속시 상기 구동 모터의 진동 성분이 음수이거나 또는 감속시 상기 구동 모터의 진동 성분이 양수이면, 휠 슬립량을 반영하여 상기 안티 저크 이득을 구하는, 휠 슬립량을 이용한 안티 저크 토크 연산 장치가 제공된다.
본 발명의 일 실시 형태에 의하면, 휠 슬립량을 이용한 안티 저크 토크 연산 방법에 있어서, 제1 모듈에서, 구동 모터의 속도와 상기 구동 모터의 모델 속도로부터 상기 구동 모터의 진동 성분을 구하는 제1 단계; 제2 모듈에서, 상기 구동 모터의 진동 성분에 곱해질 안티 저크 이득 - 상기 안티 저크 이득의 부호는 마이너스임 - 을 구하는 제2 단계; 및 제3 모듈에서, 상기 안티 저크 이득을 상기 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하는 제3 단계를 포함하며, 상기 제2 단계는, 가속시 상기 구동 모터의 진동 성분이 음수이거나 또는 감속시 상기 구동 모터의 진동 성분이 양수이면, 휠 슬립량을 반영하여 상기 안티 저크 이득을 구하는, 휠 슬립량을 이용한 안티 저크 토크 연산 방법이 제공된다.
본 발명의 일 실시 형태에 의하면, 상기 방법을 컴퓨터로 실행하기 위한 프로그램을 기록한, 컴퓨터로 판독 가능한 저장 매체가 제공된다.
본 발명의 일 실시 형태에 의하면, 안티 저크 이득을 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하되, 가속시 구동 모터의 진동 성분이 음수이거나 또는 감속시 구동 모터의 진동 성분이 양수이면 휠 슬립량을 반영하여 안티 저크 이득을 구함으로써, 차량에 발생되는 진동을 억제할 수 있다.
도 1은 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 장치를 포함한 친환경 차량의 블록도이다.
도 2는 도 1에 도시된 안티 저크 토크 연산 장치의 세부 블록도이다.
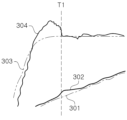
도 3a는 본 발명의 일 실시 형태에 따른 안티 저크 토크에 의한 제어를 설명하는 도면이다.
도 3b는 종래 방식에 따른 안티 저크 토크에 의한 제어를 설명하는 도면이다.
도 4a는 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 방법을 설명하기 위한 흐름도이다.
도 4b는 도 4a에 도시된 단계 S420를 구체화한 도면이다.
도 5는 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 장치를 전체적으로 또는 부분적으로 구현할 수 있는 컴퓨터 장치의 블록도이다.
도 2는 도 1에 도시된 안티 저크 토크 연산 장치의 세부 블록도이다.
도 3a는 본 발명의 일 실시 형태에 따른 안티 저크 토크에 의한 제어를 설명하는 도면이다.
도 3b는 종래 방식에 따른 안티 저크 토크에 의한 제어를 설명하는 도면이다.
도 4a는 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 방법을 설명하기 위한 흐름도이다.
도 4b는 도 4a에 도시된 단계 S420를 구체화한 도면이다.
도 5는 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 장치를 전체적으로 또는 부분적으로 구현할 수 있는 컴퓨터 장치의 블록도이다.
이하, 첨부된 도면을 참조하여 본 발명의 실시형태를 설명한다. 그러나 본 발명의 실시형태는 여러 가지의 다른 형태로 변형될 수 있으며, 본 발명의 범위가 이하 설명하는 실시형태로만 한정되는 것은 아니다. 도면에서의 요소들의 형상 및 크기 등은 보다 명확한 설명을 위해 과장될 수 있으며, 도면상의 동일한 부호로 표시되는 요소는 동일한 요소이다.
우선, 본 발명이 적용되는 차량은 하이브리드 자동차나 전기 자동차 등과 같이 구동 모터를 포함하며, 구동 모터에 의해 구동되는 친환경 차량을 포함할 수 있다.
도 1은 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 장치를 포함한 친환경 차량의 블록도이다. 그리고, 도 2는 도 1에 도시된 안티 저크 토크 연산 장치의 세부 블록도이다.
도 1에 도시된 바와 같이, 본 발명의 일 실시 형태에 따른 안티 저크 토크 연산 장치(110)를 포함한 친환경 차량(100)은 차량 정보를 제공하는 차량 정보 제공부(10), 안티 저크 토크 및 안티 저그 토크에 기초한 출력 토크를 구하는 안티 저크 토크 연산 장치(110), 안티 저크 토크 연산 장치(110)에서 연산된 출력 토크에 따라 구동되는 구동 모터(120), 구동 모터(120)의 회전력을 감속하여 전달하는 감속기(130) 및 감속기(130)를 통해 전달되는 구동 모터(120)의 회전력에 의해 회전되는 구동휠(140)을 포함할 수 있다.
우선, 차량 정보 제공부(10)는 구동 모터(120)의 속도, 구동휠(140)의 휠 속도, 가속 페달 변위량 또는 브레이크 페달 변위량을 포함하는 차량 정보를 안티 저크 토크 연산 장치(110)에 제공할 수 있다.
이를 위해 차량 정보 제공부(10)는 구동 모터(120)의 속도를 검출하기 위한 모터 속도 센서(11), 구동 휠(140)의 휠 속도를 검출하기 위한 휠속 센서(12), 가속 페달의 변위량을 측정하기 위한 가속 페달 검출부(13), 브레이크 페달의 변위량을 측정하기 위한 브레이크 페달 검출부(14)를 포함할 수 있다.
이러한 모터 속도 센서(11)는 레졸버(resolver)일 수 있으며, 휠속 센서(12)는 광센서(Optical sensor)나 자기 센서(Magnetic sensor)일 수 있으며, 가속 페달 검출부(13)는 BPS(Brake Pedal Sensor)일 수 있으며, 브레이크 페달 검출부(14)는 APS(Accelerator Pedal Sensor)일 수 있다.
한편, 안티 저크 토크 연산 장치(110)는 안티 저크 토크 및 안티 저그 토크에 기초한 출력 토크를 구할 수 있다. 안티 저크 토크 연산 장치(110)는 제1 모듈(111), 제2 모듈(112), 제3 모듈(113), 제4 모듈(114) 및 저장 모듈(115)을 포함할 수 있다.
구체적으로, 제1 모듈(111)은 구동 모터(120)의 속도와 구동 모터(120)의 모델 속도로부터 구동 모터(120)의 진동 성분(111a)을 구할 수 있다. 일 예로, 제1 모듈(111)은 구동 모터(120)의 속도로부터 구동 모터(120)의 모델 속도를 감산함으로써 구동 모터(120)의 진동 성분(111a)을 구할 수 있다. 이러한 제1 모듈(111)은 도 2에 도시된 바와 같이, 감산기(subtracter)로 구현될 수 있다.
여기서, 모델 속도는 진동이 무시된 구동 모터(120)의 속도를 의미하는 것으로, 휠속 센서(12)에 의해 검출되는 휠 속도를 구동 모터(120)에서의 속도로 변환한 등가 휠속을 의미하는 것일 수 있다.
모델 속도는 구동 모터(120)의 안티 저크 제어를 위해 필요한 기준속도라 할 수 있으며, 안티 저크 제어는 구동 모터(120)의 속도 떨림을 상쇄하기 위한 제어일 수 있다. 이러한 안티 저크 제어를 위해서는 구동 모터(120)의 속도 떨림이 어느 정도인지를 판단하기 위해 기준 속도가 필요하다. 이러한 모델 속도는 휠 속도를 이용하여 휠 속도로부터 구동 모터(120)까지 역으로 계산된 속도일 수 있다. 모델 속도를 계산함에 있어서 휠 속도 외에도 안티 저크 제어 성능을 향상시키기 위해 차량 가속도 값이 더 이용될 수도 있으며, 차량 가속도 값을 조합하여 계산되는 모델 속도의 변화를 미리 예측하여 선제적인 안티 저크 제어를 실시할 수 있다. 이러한 모델 속도의 계산 과정 역시 알려진 공지 기술이므로 본 명세서에서 상세한 설명은 생략하기로 한다.
한편, 제2 모듈(112)은 구동 모터(120)의 진동 성분(111a)에 곱해질 안티 저크 이득(112a)을 구할 수 있다. 구해진 안티 저크 이득(112a)은 제3 모듈(113)로 전달될 수 있다.
일 실시 형태에 의하면, 안티 저크 이득(112a)의 부호는 마이너스(-)일 수 있다. 따라서, 예를 들어 구동 모터(120)의 진동 성분(111a)이 양수일 경우(이 경우에 구동 모터(120)의 속도가 모델 속도보다 큼), 안티 저크 이득(112a)과 구동 모터(120)의 진동 성분(111a)의 곱인 안티 저크 토크(113a)는 음수가 될 수 있다.
반면, 구동 모터(120)의 진동 성분(111a)이 음수일 경우(이 경우에 구동 모터(120)의 속도가 모델 속도보다 작음), 안티 저크 이득(112a)과 구동 모터(120)의 진동 성분(111a)의 곱인 안티 저크 토크(113a)는 양수가 될 수 있다.
한편, 본 발명의 일 실시 형태에 의하면, 제2 모듈(112)은 가속시 구동 모터(120)의 진동 성분(111a)이 음수이거나 또는 감속시 구동 모터(120)의 진동 성분(111a)이 양수이면, 휠 슬립량을 반영하여 안티 저크 이득(112a)을 구할 수 있다. 가속시는 운전자 요구 토크가 양수인 경우를 의미하며, 감속시는 운전자 요구 토크가 음수인 경우를 의미한다.
한편, 휠 슬립량은 하기 수학식 1과 같이 구동 모터(120)의 속도와 구동 휠(140)의 휠 속도간의 차이의 절대값으로 정의될 수 있다.
[수학식 1]
휠 슬립량 = |구동 모터의 속도 - 구동 휠의 휠 속도|
상술한 운전자 요구 토크는 운전자 요구를 반영하고 있는 운전자의 가속페달 변위량과 브레이크 페달 변위량을 기초로 결정될 수 있다. 본 명세서에서 운전자 요구 토크의 산출 과정이나 그 방법에 대해서는 공지 기술이므로 상세한 설명은 생략하기로 한다.
가속시 구동 모터(120)의 진동 성분(111a)이 음수인 경우에는 음수인 구동 모터(120)의 진동 성분(111a)과 음수인 안티 저크 이득(112a)이 곱해져 안티 저크 토크(113a)는 양수가 되며, 양수인 안티 저크 토크는 양수인 운전자 요구 토크에 더해져 구동 모터(120)의 출력 토크가 커지므로, 휠 슬립량이 더욱 증가하여 진동이 커질 수 있다.
마찬가지로, 감속시 구동 모터(120)의 진동 성분(111a)이 양수인 경우에는 양수인 구동 모터(120)의 진동 성분(111a)과 음수인 안티 저크 이득(112a)이 곱해져 안티 저크 토크(113a)는 음수가 되며, 음수인 안티 저크 토크는 음수인 운전자 요구 토크에 더해져 구동 모터(120)의 출력 토크가 작아지므로, 휠 슬립량이 더욱 감소하여 진동이 커질 수 있다.
따라서, 본 발명의 일 실시 형태에 의하면, 제2 모듈(112)은 가속시 구동 모터(120)의 진동 성분(111a)이 음수이거나 또는 감속시 구동 모터(120)의 진동 성분(111a)이 양수이면, 휠 슬립량을 반영하여 안티 저크 이득(112a)을 구함으로써 가속 또는 감속시 휠 슬립이 증가함으로써 발생되는 진동을 억제할 수 있다.
상술한 안티 저크 이득(112a)은 기 설정된 이득에 휠 슬립량에 따른 인자를 곱한 값일 수 있다. 여기서, 기 설정된 이득은 음수이다. 상술한 휠 슬립량에 따른 인자는 0 이상 1 이하의 값으로, 휠 슬립량이 0이면 휠 슬립량에 따른 인자는 1이며, 휠 슬립량이 0이 아니면 휠 슬립량에 따른 인자는 휠 슬립량에 반비례하는 값일 수 있다. 하기 표 1에는 휠 슬립량에 따른 인자를 예시적으로 도시하고 있다.
상술한 표 1은 본 발명의 이해를 돕기 위한 예시에 불과하며, 본 발명은 표 1에 기술된 구체적인 수치에 한정되는 것은 아님에 유의하여야 한다.
반면, 본 발명의 다른 실시 형태에 의하면, 제2 모듈(112)은 가속시 구동 모터(120)의 진동 성분(111a)이 음수가 아니거나 또는 감속시 구동 모터(120)의 진동 성분(111a)이 양수가 아니면 기 설정된 이득을 안티 저크 이득(112a)으로 할 수 있다.
즉, 가속시 구동 모터(120)의 진동 성분(111a)이 음수가 아니거나 또는 감속시 구동 모터(120)의 진동 성분(111a)이 양수가 아닌 경우에는 종래 방식과 동일하게 기 설정된 이득을 안티 저크 이득(112a)으로 할 수 있다.
이러한 제2 모듈(112)은, 도 2에 도시된 바와 같이, 승산기(multiplier)로 구현될 수 있다.
한편, 제3 모듈(113)은 안티 저크 이득(112a)을 구동 모터(120)의 진동 성분(111a)에 곱하여 안티 저크 토크(113a)를 구할 수 있다. 구해진 안티 저크 토크(113a)는 제4 모듈(114)로 전달될 수 있다. 이러한 제3 모듈(111)은, 도 2에 도시된 바와 같이, 승산기(multiplier)로 구현될 수 있다.
제4 모듈(114)은 안티 저크 토크(113a)를 운전자 요구 토크에 더해 출력 토크를 구할 수 있다. 이러한 출력 토크에 의해 구동 모터(120)를 구동함으로써 가속시 또는 감속시의 슬립량 증가에 의한 진동을 억제할 수 있다.
이러한 제4 모듈(113)은, 도 2에 도시된 바와 같이, 가산기(adder)로 구현될 수 있다.
마지막으로, 저장 모듈(115)은 상술한 제1 모듈(111) 내지 제4 모듈(114)에서 수행되는 각종 기능을 구현하기 위한 각종 프로그램을 저장하기 위한 저장 매체일 수 있다.
한편, 도 3a는 본 발명의 일 실시 형태에 따른 안티 저크 토크에 의한 제어를 설명하는 도면으로, 가속시 전륜에 휠 슬립이 발생된 경우이다. 도 3a에서 도면 부호 301은 후륜의 휠 속도, 도면 부호 302는 전륜의 휠 속도, 도면 부호 303은 운전자 요구 토크, 도면 부호 304는 구동 모터(120)에 인가되는 출력 토크를 의미한다.
도 3a를 참조하면, 가속시, 즉 운전자 요구 토크(303)가 양수일 때, 휠 슬립이 발생되면(T1 시점), 휠 슬립이 발생된 T1 시점에서 휠 슬립량을 반영한 안티 저크 토크를 운전자 요구 토크(303)에 더하여 출력 토크(304)를 구한다. 이후 출력 토크(304)를 구동 모터(120)에 인가함으로써 전륜의 속도(302)를 감소시켜 슬립이 억제될 수 있다.
즉, 휠 슬립량을 반영한 안티 저크 토크는 휠 슬립량을 반영하지 않은 안티 저크 토크(도 3b를 참조하여 후술함)에 비해 출력 토크(304)를 감소시키게 된다. 감소된 출력 토크(304)는 슬립이 발생된 전륜의 휠 속도(302)를 감소시키게 되며, 그로 인해 전륜의 슬립이 억제됨을 알 수 있다.
반면, 도 3b는 종래 방식에 따른 안티 저크 토크에 의한 제어를 설명하는 도면으로, 도 3a와 마찬가지로 가속시 전륜에 휠 슬립이 발생된 경우이다. 도 3b에서 도면 부호 311은 후륜의 휠 속도, 도면 부호 312는 전륜의 휠 속도, 도면 부호 313은 운전자 요구 토크, 도면 부호 314는 구동 모터(120)에 인가되는 출력 토크를 의미한다.
도 3b를 참조하면, 가속시, 즉 운전자 요구 토크(313)가 양수일 때, 휠 슬립이 발생되면(T1 시점), 휠 슬립이 발생된 T1 시점에서 휠 슬립량을 반영되지 않은 안티 저크 토크가 운전자 요구 토크(313)에 더하져 출력 토크(314)가 구해진다. 이후 출력 토크(314)를 구동 모터(120)에 인가됨으로써 전륜의 속도(312)가 증가되어 휠 슬립량이 증가됨을 알 수 있다.
즉, 휠 슬립량을 반영하지 않은 안티 저크 토크는 휠 슬립량을 반영한 안티 저크 토크에 비해 가속시 또는 감속시 출력 토크(314)를 증가시키게 된다(T1 시점 참조). 증가된 출력 토크(314)는 슬립이 발생된 전륜의 휠 속도(312)를 증가시키게 되며, 그로 인해 전륜의 슬립량이 증가하게 된다.
특히, 도 3b에 도시된 종래 방식의 경우, 슬립이 발생된 이후 어느 정도 시간이 지난 T2 시점에서 운전자 요구 토크(313)를 저감시키는 토크 저감 제어가 수행될 경우 차량에 2차 진동을 야기하게 된다.
반면, 도 3a에 도시된 바와 같이, 본 발명의 경우 슬립이 발생된 시점(T1) 시점에서 바로 안티-토크 제어가 수행되며, T2 시점에서 별도의 토크 저감 제어를 할 필요가 없으므로, 토크 저감 제어로 인한 2차 진동을 방지할 수 있는 이점도 있다.
상술한 바와 같이, 본 발명의 일 실시 형태에 의하면, 안티 저크 이득을 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하되, 가속시 구동 모터의 진동 성분이 음수이거나 또는 감속시 구동 모터의 진동 성분이 양수이면 휠 슬립량을 반영하여 안티 저크 이득을 구함으로써, 차량에 발생되는 진동을 억제할 수 있다.
도 4a는 본 발명의 일 실시 형태에 따른 휠 슬립량을 이용한 안티 저크 토크 연산 방법을 설명하기 위한 흐름도이다. 그리고, 도 4b는 도 4a에 도시된 단계 S420를 구체화한 도면이다.
이하, 도 1 내지 도 4b을 참조하여 본 발명의 일 실시 형태에 따른 안티 저크 토크 연산 방법(S400)을 설명한다. 다만, 발명의 간명화를 위해 도 1 내지 도 3b와 중복된 설명은 생략한다.
우선, 도 1 내지 도 4b에 도시된 바와 같이, 본 발명의 일 실시 형태에 따른 안티 저크 토크 연산 방법(S400)은 제1 모듈(111)에서 구동 모터(120)의 속도와 구동 모터(120)의 모델 속도로부터 구동 모터(120)의 진동 성분(111a)을 구하는 단계에 의해 시작될 수 있다(S410). 구해진 구동 모터(120)의 진동 성분(111a)은 제2 모듈(113)로 전달될 수 있다.
일 예로, 제1 모듈(111)은 구동 모터(120)의 속도로부터 구동 모터(120)의 모델 속도를 감산함으로써 구동 모터(120)의 진동 성분(111a)을 구할 수 있다.
여기서, 모델 속도는 진동이 무시된 구동 모터(120)의 속도를 의미하는 것으로, 휠속 센서(12)에 의해 검출되는 휠 속도를 구동 모터(120)에서의 속도로 변환한 등가 휠속도를 의미하는 것일 수 있음은 상술한 바와 같다.
다음, 제2 모듈(112)은 구동 모터(120)의 진동 성분(111a)에 곱해질 안티 저크 이득(112a)을 구할 수 있다(S420). 구해진 안티 저크 이득(112a)은 제3 모듈(113)로 전달될 수 있다.
본 발명의 일 실시 형태에 의하면, 안티 저크 이득(112a)의 부호는 마이너스(-)일 수 있다. 따라서, 예를 들어 구동 모터(120)의 진동 성분(111a)이 양수일 경우(이 경우에 구동 모터(120)의 속도가 모델 속도보다 큼), 안티 저크 이득(112a)과 구동 모터(120)의 진동 성분(111a)의 곱인 안티 저크 토크(113a)는 음수가 될 수 있다.
반면, 구동 모터(120)의 진동 성분(111a)이 음수일 경우(이 경우에 구동 모터(120)의 속도가 모델 속도보다 작음), 안티 저크 이득(112a)과 구동 모터(120)의 진동 성분(111a)의 곱인 안티 저크 토크(113a)는 양수가 될 수 있음은 상술한 바와 같다.
이하 도 4b를 참조하여 도 4a에 도시된 단계 S420를 설명한다.
도 4b에 도시된 바와 같이, 제2 모듈(112)은 가속시(즉, 운전자 요구 토크가 양수)(S421), 구동 모터(120)의 진동 성분(111a)이 음수이면(S422), 기 설정된 이득에 휠 슬립량에 따른 이득을 곱하여 안티 저크 이득을 구할 수 있다(S424).
또한, 제2 모듈(112)은 감속시(즉, 운전자 요구 토크가 음수)(S421)이며, 구동 모터(120)의 진동 성분(111a)이 양수이면(S423), 기 설정된 이득에 휠 슬립량에 따른 이득을 곱하여 안티 저크 이득을 구할 수 있다(S424). 한편, 휠 슬립량은 상술한 수학식 1과 같이 구동 모터(120)의 속도와 구동 휠(140)의 휠 속도간의 차이의 절대값으로 정의될 수 있음은 상술한 바와 같다.
여기서, 기 설정된 이득은 음수이며, 상술한 휠 슬립량에 따른 인자는 0 이상 1 이하의 값으로, 휠 슬립량이 0이면 휠 슬립량에 따른 인자는 1이며, 휠 슬립량이 0이 아니면 휠 슬립량에 따른 인자는 휠 슬립량에 반비례하는 값일 수 있음은 상술한 바와 같다.
한편, 본 발명의 다른 실시 형태에 의하면, 제2 모듈(112)은 가속시(즉, 운전자 요구 토크가 양수)(S421), 구동 모터(120)의 진동 성분(111a)이 음수가 아니면(S422), 기 설정된 이득을 안티 저크 이득(112a)으로 할 수 있다(S425).
또한, 제2 모듈(112)은 감속시(즉, 운전자 요구 토크가 음수)이며(S421), 구동 모터(120)의 진동 성분(111a)이 양수가 아니면(S423), 기 설정된 이득을 안티 저크 이득(112a)으로 할 수 있다(S425).
즉, 가속시 구동 모터(120)의 진동 성분(111a)이 음수가 아니거나 또는 감속시 구동 모터(120)의 진동 성분(111a)이 양수가 아닌 경우에는 종래 방식과 동일하게 기 설정된 이득을 안티 저크 이득(112a)으로 할 수 있다.
다시 도 4a를 참조하면, 제3 모듈(113)은 안티 저크 이득(112a)을 구동 모터(120)의 진동 성분(111a)에 곱하여 안티 저크 토크(113a)를 구할 수 있다(S430). 구해진 안티 저크 토크(113a)는 제4 모듈(114)로 전달될 수 있다.
마지막으로, 제4 모듈(114)은 안티 저크 토크(113a)를 운전자 요구 토크에 더해 출력 토크를 구할 수 있다(S440). 이러한 출력 토크에 의해 구동 모터(120)를 구동함으로써 가속시 또는 감속시의 슬립량 증가에 의한 진동을 억제할 수 있다.
본 발명을 설명함에 있어, 구동 모터(120)의 진동 성분(111a)은 구동 모터(120)의 속도로부터 구동 모터(120)의 모델 속도를 감산한 값이며, 안티 저크 이득(112a)의 부호는 마이너스(-)인 것을 전제로 설명하였으나, 이는 발명의 이해를 돕기 위한 것으로, 본 발명은 반드시 이에 한정되는 것은 아님에 유의하여야 한다. 즉, 구동 모터(120)의 진동 성분(111a)을 구동 모터(120)의 모델 속도로부터 구동 모터(120)의 속도를 감산한 값으로 정의하는 경우, 안티 저크 이득(112a)의 부호는 플러스(+)일 수 있음은 물론이다.
상술한 바와 같이, 본 발명의 일 실시 형태에 의하면, 안티 저크 이득을 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하되, 가속시 구동 모터의 진동 성분이 음수이거나 또는 감속시 구동 모터의 진동 성분이 양수이면 휠 슬립량을 반영하여 안티 저크 이득을 구함으로써, 차량에 발생되는 진동을 억제할 수 있다.
한편, 도 5는 본 발명의 일 실시 형태에 따른 안티 저크 토크 연산 장치(110)를 전체적으로 또는 부분적으로 구현할 수 있는 컴퓨터 장치의 블록도로, 도 1에 도시된 안티 저크 토크 연산 장치(110)에 적용될 수 있다.
도 5에 도시된 바와 같이, 컴퓨터 장치(500)는 입력 인터페이스(501), 출력 인터페이스(502), 프로세서(504) 및 메모리(505)를 포함하며, 입력 인터페이스(501), 출력 인터페이스(502), 프로세서(504) 및 메모리(505)는 시스템 버스(503)를 통해 상호 연결될 수 있다.
본 발명의 실시예에 있어서, 메모리(505)는 프로그램, 명령어 또는 코드를 저장하는데 사용되며, 프로세서(504)는 메모리(505)에 저장된 프로그램, 명령어 또는 코드를 수행하고, 입력 인터페이스(501)를 제어하여 신호를 수신하고, 출력 인터페이스(502)를 제어하여 신호를 송신할 수 있다. 상술한 메모리(505)는 읽기 전용 메모리 및 랜덤 액세스 메모리를 포함할 수 있고, 프로세서(504)에 명령어와 데이터를 제공할 수 있다.
본 발명의 실시예에 있어서, 프로세서(504)는 중앙 처리 장치(Central Processing Unit, CPU)일 수 있고, 다른 범용 프로세서, 디지털 신호 프로세서(Digital Signal Processor, DSP), 주문형 집적 회로(Application Specific Integrated Circuit, ASIC), 필드 프로그래머블 게이트 어레이(Field Programmable Gate Array, FPGA) 또는 다른 프로그래머블 논리 디바이스, 개별 게이트 또는 트랜지스터 논리 디바이스, 개별 하드웨어 구성 요소 등일 수 있는 것으로 이해되어야 한다. 범용 프로세서는 마이크로 프로세서일 수 있거나, 또는 해당 프로세서는 임의의 종래의 프로세서 등일 수 있다.
일 구현 과정에 있어서, 도 1의 각 장치에서 수행되는 방법은 프로세서(504) 내의 하드웨어의 통합 논리 회로 또는 소프트웨어 형태의 명령어에 의해 달성될 수 있다. 본 발명의 실시 형태에 관련하여 개시되는 방법의 내용은 하드웨어 프로세서에 의해 수행되어 완료되거나, 또는 프로세서의 하드웨어 및 소프트웨어 모듈의 조합에 의해 수행되어 완료되도록 구현될 수 있다. 소프트웨어 모듈은 랜덤 액세스 메모리, 플래시 메모리, 읽기 전용 메모리, 프로그래머블 읽기 전용 메모리 또는 전기적 소거 가능한 프로그래머블 메모리, 레지스터 등의 저장 매체에 배치될 수 있다. 해당 저장 매체는 메모리(505)에 위치하고 있으며, 프로세서(504)는 메모리(505)의 정보를 독출하고, 하드웨어와 결합하여 상술한 방법의 내용을 구현한다. 중복을 피하기 위해, 여기서 상세한 설명은 생략한다.
한편, 본 발명에서 '~ 모듈'은 다양한 방식, 예를 들면 프로세서, 프로세서에 의해 수행되는 프로그램 명령들, 소프트웨어 모듈, 마이크로 코드, 컴퓨터 프로그램 생성물, 로직 회로, 어플리케이션 전용 집적 회로, 펌웨어 등에 의해 구현될 수 있거나 또는 하드웨어에 의해 구현될 수도 있다.
본 발명은 상술한 실시형태 및 첨부된 도면에 의해 한정되지 아니한다. 첨부된 청구범위에 의해 권리범위를 한정하고자 하며, 청구범위에 기재된 본 발명의 기술적 사상을 벗어나지 않는 범위 내에서 다양한 형태의 치환, 변형 및 변경할 수 있다는 것은 당 기술분야의 통상의 지식을 가진 자에게 자명할 것이다.
10: 차량 정보 제공부
100: 시스템
110: 안티 저크 토크 연산 장치
111: 제1 모듈
111a: 구동 모터의 진동 성분
112: 제2 모듈
112a: 안티 저크 이득
113: 제3 모듈
113a: 안티 저크 토크
114: 제4 모듈
115: 저장부
120: 구동 모터
130: 감속기
140: 구동휠
301, 311: 후륜의 휠 속도
302, 312: 전륜의 휠 속도
303, 313: 운전자 요구 토크
304, 314: 출력 토크
500: 안티 저크 토크 연산 장치를 전체적으로 또는 부분적으로 구현할 수 있는 컴퓨터 장치
501: 입력 인터페이스
502: 출력 인터페이스
503: 시스템 버스
504: 프로세서
505: 메모리
100: 시스템
110: 안티 저크 토크 연산 장치
111: 제1 모듈
111a: 구동 모터의 진동 성분
112: 제2 모듈
112a: 안티 저크 이득
113: 제3 모듈
113a: 안티 저크 토크
114: 제4 모듈
115: 저장부
120: 구동 모터
130: 감속기
140: 구동휠
301, 311: 후륜의 휠 속도
302, 312: 전륜의 휠 속도
303, 313: 운전자 요구 토크
304, 314: 출력 토크
500: 안티 저크 토크 연산 장치를 전체적으로 또는 부분적으로 구현할 수 있는 컴퓨터 장치
501: 입력 인터페이스
502: 출력 인터페이스
503: 시스템 버스
504: 프로세서
505: 메모리
Claims (15)
- 휠 슬립량을 이용한 안티 저크 토크 연산 장치에 있어서, 상기 안티 저크 토크 연산 장치는,
프로세서; 및
상기 프로세서에 의해 실행 가능하도록 구성된 하나 이상의 프로그램을 기록한 저장 매체를 포함하며, 상기 하나 이상의 프로그램은,
구동 모터의 속도와 상기 구동 모터의 모델 속도로부터 상기 구동 모터의 진동 성분을 구하는 제1 모듈;
상기 구동 모터의 진동 성분에 곱해질 안티 저크 이득 - 상기 안티 저크 이득의 부호는 마이너스임 - 을 구하는 제2 모듈; 및
상기 안티 저크 이득을 상기 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하는 제3 모듈을 구현하기 위한 명령들을 포함하며,
상기 제2 모듈은, 가속시 상기 구동 모터의 진동 성분이 음수이거나 또는 감속시 상기 구동 모터의 진동 성분이 양수이면, 휠 슬립량을 반영하여 상기 안티 저크 이득을 구하는, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제1항에 있어서,
상기 안티 저크 이득은,
기 설정된 이득에 상기 휠 슬립량에 따른 인자를 곱한 값인, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제2항에 있어서,
상기 휠 슬립량에 따른 인자는 0 이상 1 이하의 값으로,
상기 휠 슬립량이 0이면 상기 휠 슬립량에 따른 인자는 1이며,
상기 휠 슬립량이 0이 아니면 상기 휠 슬립량에 따른 인자는 휠 슬립량에 반비례하는 값인, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제2항에 있어서,
상기 제2 모듈은,
가속시 상기 구동 모터의 진동 성분이 음수가 아니거나 또는 감속시 상기 구동 모터의 진동 성분이 양수가 아니면 상기 기 설정된 이득을 상기 안티 저크 이득으로 하는, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제1항에 있어서,
상기 가속시 운전자 요구 토크는 양수이며,
상기 감속시 상기 운전자 요구 토크는 음수인, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제1항에 있어서,
상기 휠 슬립량은
상기 구동 모터의 속도와 휠 속도간의 차이의 절대값인, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 제1항에 있어서,
상기 안티 저크 토크 연산 장치는,
상기 안티 저크 토크를 운전자 요구 토크에 더해 출력 토크를 구하는 제4 모듈을 더 포함하는, 휠 슬립량을 이용한 안티 저크 토크 연산 장치. - 휠 슬립량을 이용한 안티 저크 토크 연산 방법에 있어서,
제1 모듈에서, 구동 모터의 속도와 상기 구동 모터의 모델 속도로부터 상기 구동 모터의 진동 성분을 구하는 제1 단계;
제2 모듈에서, 상기 구동 모터의 진동 성분에 곱해질 안티 저크 이득 - 상기 안티 저크 이득의 부호는 마이너스임 - 을 구하는 제2 단계; 및
제3 모듈에서, 상기 안티 저크 이득을 상기 구동 모터의 진동 성분에 곱하여 안티 저크 토크를 구하는 제3 단계를 포함하며,
상기 제2 단계는, 가속시 상기 구동 모터의 진동 성분이 음수이거나 또는 감속시 상기 구동 모터의 진동 성분이 양수이면, 휠 슬립량을 반영하여 상기 안티 저크 이득을 구하는, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제8항에 있어서,
상기 안티 저크 이득은,
기 설정된 이득에 상기 휠 슬립량에 따른 인자를 곱한 값인, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제9항에 있어서,
상기 휠 슬립량에 따른 인자는 0 이상 1 이하의 값으로,
상기 휠 슬립량이 0이면 상기 휠 슬립량에 따른 인자는 1이며,
상기 휠 슬립량이 0이 아니면 상기 휠 슬립량에 따른 인자는 휠 슬립량에 반비례하는 값인, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제9항에 있어서,
상기 제2 단계는,
가속시 상기 구동 모터의 진동 성분이 음수가 아니거나 또는 감속시 상기 구동 모터의 진동 성분이 양수가 아니면 상기 기 설정된 이득을 상기 안티 저크 이득으로 하는, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제8항에 있어서,
상기 가속시 운전자 요구 토크는 양수이며,
상기 감속시 상기 운전자 요구 토크는 음수인, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제8항에 있어서,
상기 휠 슬립량은
상기 구동 모터의 속도와 휠 속도간의 차이의 절대값인, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제8항에 있어서,
상기 안티 저크 토크 연산 방법은,
제4 모듈에서, 상기 안티 저크 토크를 운전자 요구 토크에 더해 출력 토크를 구하는 단계를 더 포함하는, 휠 슬립량을 이용한 안티 저크 토크 연산 방법. - 제8항에 기재된 방법을 컴퓨터상에서 실행하기 위한 프로그램을 기록한, 컴퓨터로 판독 가능한 저장 매체.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020230029260A KR20240136498A (ko) | 2023-03-06 | 2023-03-06 | 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020230029260A KR20240136498A (ko) | 2023-03-06 | 2023-03-06 | 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20240136498A true KR20240136498A (ko) | 2024-09-19 |
Family
ID=92928395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020230029260A Pending KR20240136498A (ko) | 2023-03-06 | 2023-03-06 | 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20240136498A (ko) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110049934A (ko) | 2009-11-06 | 2011-05-13 | 현대자동차주식회사 | 하이브리드 차량의 안티 저크 제어 장치 및 방법 |
-
2023
- 2023-03-06 KR KR1020230029260A patent/KR20240136498A/ko active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110049934A (ko) | 2009-11-06 | 2011-05-13 | 현대자동차주식회사 | 하이브리드 차량의 안티 저크 제어 장치 및 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN110606073B (zh) | 轻混动力系统驾驶员扭矩需求计算方法、存储介质及车辆 | |
| US20130002176A1 (en) | Drive motor control system and method for a vehicle | |
| US11351976B2 (en) | Motor torque control method for motor-driven vehicle | |
| US20150151732A1 (en) | System and method for controlling fuzzy engine clutch of hybrid vehicle | |
| US9037364B2 (en) | Method and system for controlling anti-jerk of vehicle | |
| CN115123195B (zh) | 前驱车辆扭矩控制方法、装置和车辆 | |
| CN114275038B (zh) | 方向盘的振动抑制方法、装置、车辆及存储介质 | |
| JP2013169953A (ja) | 電動機制御装置 | |
| WO2013041943A1 (en) | Control device and control method for vehicle | |
| KR20230081919A (ko) | 드리프트 주행 탈출을 위한 자동차의 토크 연산 장치, 방법 및 컴퓨터로 독출 가능한 저장 매체 | |
| CN116101371B (zh) | 转向控制方法和装置、存储介质、线控转向系统、车辆 | |
| KR102579862B1 (ko) | 전기 모터를 구비하는 차량 및 그를 위한 주행 제어 방법 | |
| CN114954030B (zh) | 电动汽车的扭矩控制方法及相关装置 | |
| US20230211671A1 (en) | Apparatus and method of reducing vibration of electric vehicle | |
| KR20240136498A (ko) | 휠 슬립량을 이용한 안티 저크 토크 연산 장치, 방법 및 컴퓨터로 판독 가능한 저장 매체 | |
| KR20190138177A (ko) | 차량 제동 시스템 및 그 제어 방법 | |
| CN103339008A (zh) | 传动系振动的阻尼 | |
| CN118722566A (zh) | 扭矩控制方法、装置、存储介质、控制器及车辆 | |
| JP6870622B2 (ja) | 電動車両の制御装置 | |
| CN117207945A (zh) | 车辆制动控制方法、装置、设备及存储介质 | |
| CN117302226B (zh) | 车辆的方向盘抖动优化方法、装置、设备及存储介质 | |
| CN113859221B (zh) | 混合动力车辆的动力控制方法、装置及车辆 | |
| CN107757627B (zh) | 车辆用控制装置以及信息提供方法 | |
| CN115871472B (zh) | 车辆及其动力总成的控制方法、装置以及介质、电子设备 | |
| CN119568125B (zh) | 一种车辆扭矩控制方法、装置和设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| D11 | Substantive examination requested |
Free format text: ST27 STATUS EVENT CODE: A-1-2-D10-D11-EXM-PA0201 (AS PROVIDED BY THE NATIONAL OFFICE) |
|
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |