KR20230003515A - 외팔보 구성을 갖는 컨테이너 핸들링 운반체, 및 복수의 컨테이너 핸들링 운반체를 포함하는 자동화된 저장 및 회수 시스템 - Google Patents
외팔보 구성을 갖는 컨테이너 핸들링 운반체, 및 복수의 컨테이너 핸들링 운반체를 포함하는 자동화된 저장 및 회수 시스템 Download PDFInfo
- Publication number
- KR20230003515A KR20230003515A KR1020227039530A KR20227039530A KR20230003515A KR 20230003515 A KR20230003515 A KR 20230003515A KR 1020227039530 A KR1020227039530 A KR 1020227039530A KR 20227039530 A KR20227039530 A KR 20227039530A KR 20230003515 A KR20230003515 A KR 20230003515A
- Authority
- KR
- South Korea
- Prior art keywords
- container handling
- handling vehicle
- container
- storage
- section
- Prior art date
Links
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0464—Storage devices mechanical with access from above
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60B—VEHICLE WHEELS; CASTORS; AXLES FOR WHEELS OR CASTORS; INCREASING WHEEL ADHESION
- B60B19/00—Wheels not otherwise provided for or having characteristics specified in one of the subgroups of this group
- B60B19/003—Multidirectional wheels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0407—Storage devices mechanical using stacker cranes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0457—Storage devices mechanical with suspended load carriers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0478—Storage devices mechanical for matrix-arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/06—Storage devices mechanical with means for presenting articles for removal at predetermined position or level
- B65G1/065—Storage devices mechanical with means for presenting articles for removal at predetermined position or level with self propelled cars
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0235—Containers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Warehouses Or Storage Devices (AREA)
Abstract
2-차원적인 레일 시스템(108) 상에서의 동작을 위한 컨테이너 핸들링 운반체는 하부 섹션(411)을 갖는 본체 유닛(410), 하부 섹션으로부터 수직으로 연장하는 지지 섹션(412), 지지 섹션으로부터 수평으로 연장하는 외팔보 섹션(413) 및 외팔보 섹션으로부터 매달린 상승 프레임(415)를 갖는 상승 장치(414)를 포함하고, 도킹될 때 상승 프레임의 최하부 부분은 하부 섹션의 상단 표면 위에 있다.
Description
본 발명은 자동화된 저장 및 회수 시스템의 분야에 관한 것이다. 특히, 본 발명은 외팔보 섹션(cantilever section)을 갖는 컨테이너 핸들링 운반체 및 복수의 컨테이너 핸들링 운반체를 포함하는 자동화된 저장 및 회수 시스템에 관한 것으로서, 컨테이너 핸들링 운반체는, 외팔보 유형의 종래 기술의 컨테이너 핸들링 운반체와 비교할 때, 하부 레일 시스템 상의 더 적은 수의 그리드 셀을 점유하는 것에 의해서, 2개의 컨테이너 핸들링 운반체가 서로를 지날 수 있게 하는 구성을 갖는다.
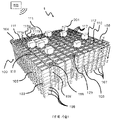
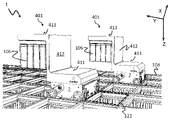
도 1a는 프레임워크 구조물(100)을 갖는 전형적인 종래 기술의 자동화된 저장 및 회수 시스템(1)을 개시하고, 도 2 및 도 3a는 그러한 시스템(1)에서의 동작에 적합한 2개의 상이한 종래 기술의 컨테이너 핸들링 운반체(201, 301)를 개시한다.
프레임워크 구조물(100)은 직립 부재(102), 수평 부재(103), 및 직립 부재(102)와 수평 부재(103) 사이에서 행(row)으로 배열되는 저장 컬럼(105)을 포함하는 저장 부피를 포함한다. 이러한 저장 컬럼(105) 내에서, 빈(bin)으로도 알려져 있는 저장 컨테이너(106)가 서로 상하로 적층되어 적층체(107)를 형성한다. 부재(102, 103)는 전형적으로 금속, 예를 들어 압축 알루미늄 프로파일로 제조될 수 있다.
자동화된 저장 및 회수 시스템(1)의 프레임워크 구조물(100)은 프레임워크 구조물(100)의 상단부에 걸쳐 배열된 레일 시스템(108)을 포함하고, 레일 시스템(108) 상에서 복수의 컨테이너 핸들링 운반체(201, 301)가 동작되어 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키고, 저장 컨테이너(106)를 저장 컬럼 내로 하강시키며, 또한 저장 컨테이너(106)를 저장 컬럼(105) 위에서 운송한다. 레일 시스템(108)은 프레임 구조물(100)의 상단부에 걸친 제1 방향(X)으로 컨테이너 핸들링 운반체(201, 301)의 이동을 안내하도록 배열된 제1 세트의 평행 레일(110), 및 제1 방향(X)에 수직인 제2 방향(Y)으로 컨테이너 핸들링 운반체(201, 301)의 이동을 안내하기 위한, 제1 세트의 레일(110)에 수직으로 배열된, 제2 세트의 평행 레일(111)을 포함한다. 컨테이너 핸들링 운반체는 레일 시스템(108) 내의 그리드 셀(122) 내의 접근 개구부/그리드 개구부(112)를 통해서 컬럼(105) 내에 저장된 컨테이너(106)에 접근한다. 컨테이너 핸들링 운반체(201, 301)는 저장 컬럼(105) 위에서 측방향으로, 즉 수평 X-Y 평면에 평행한 평면 내에서 이동할 수 있다.
프레임워크 구조물(100)의 직립 부재(102)는, 컨테이너를 컬럼(105)으로부터 상승시키고 컨테이너를 컬럼 내로 하강시키는 동안 저장 컨테이너를 안내하기 위해서 사용된다. 컨테이너(106)의 적층체(107)는 전형적으로 자가-지지형이다.
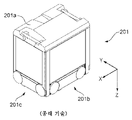
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는 운반체 본체(201a, 301a), 및 X 방향 및 Y 방향 각각을 따른 컨테이너 핸들링 운반체(201, 301)의 측방향 이동을 가능하게 하는 제1 및 제2 세트의 휠(201b, 301b, 201c, 301c)을 포함한다. 도 2 및 도 3a에서, 각각의 세트 내의 2개의 휠을 완전히 확인할 수 있다. 제1 세트의 휠(201b, 301b)은 제1 세트의 레일(110) 중의 2개의 인접 레일들과 결합되도록 배열되고, 제2 세트의 휠(201c, 301c)은 제2 세트의 레일(111) 중의 2개의 인접 레일들과 결합되도록 배열된다. 세트의 휠(201b, 301b, 201c, 301c) 중 적어도 하나가 상승 및 하강될 수 있고, 그에 따라 제1 세트의 휠(201b, 301b) 및/또는 제2 세트의 휠(201c, 301c)이 언제든지 각각의 세트의 레일(110, 111)과 결합될 수 있다.
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는 또한 저장 컨테이너(106)의 수직 운송을 위한, 예를 들어 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키고 저장 컨테이너(106)를 저장 컬럼 내로 하강시키기 위한 상승 장치(미도시)를 포함한다. 상승 장치는 하나 이상의 파지/결합 장치를 포함하고, 그러한 파지/결합 장치는 저장 컨테이너(106)와 결합되도록 구성되고, 그러한 파지/결합 장치는 운반체(201, 301)로부터 하강될 수 있고, 그에 따라 운반체(201, 301)에 대한 파지/결합 장치의 위치가, 제1 방향(X) 및 제2 방향(Y)에 수직인, 제3 방향(Z)으로 조정될 수 있다. 컨테이너 핸들링 운반체(301)의 파지 장치의 일부가 도 3a에 도시되어 있고 참조 번호 304로 표시되어 도시되어 있다. 컨테이너 핸들링 장치(201)의 파지 장치는 도 2에서 운반체 본체(301a) 내에 위치된다.
통상적으로 그리고 또한 본원의 목적을 위해서, Z=1은 저장 컨테이너의 최상부 층, 즉 레일 시스템(108) 바로 아래의 층을 나타내고, Z=2는 레일 시스템(108) 아래의 2번째 층, 그리고 Z=3은 3번째 층 등을 나타낸다. 도 1a에 개시된 예시적인 종래 기술에서, Z=8은 저장 컨테이너의 최하부의 하단 층을 나타낸다. 유사하게, X=1…n 및 Y=1…n은 수평 평면 내의 각각의 저장 컬럼(105)의 위치를 나타낸다. 결과적으로, 예로서, 그리고 도 1a에 표시된 데카르트 좌표계(X, Y, Z)를 이용하면, 도 1a에서 106'으로 표시된 저장 컨테이너는 X=10, Y=2, Z=3의 저장 위치를 점유한다고 할 수 있다. 컨테이너 핸들링 운반체(201, 301)가 층(Z=0) 내에서 이동된다고 할 수 있고, 각각의 저장 컬럼(105)은 그 X 및 Y 좌표에 의해서 표시될 수 있다.
프레임워크 구조물(100)의 저장 부피는 종종 그리드(104)로 지칭되고, 이러한 그리드 내의 가능한 저장 위치는 저장 셀로 지칭된다. 각각의 저장 컬럼은 X- 및 Y-방향을 따른 위치에 의해서 표시될 수 있는 한편, 각각의 저장 셀은 X-, Y- 및 Z-방향을 따른 컨테이너 번호에 의해서 표시될 수 있다.
각각의 종래 기술의 컨테이너 핸들링 운반체(201, 301)는, 저장 컨테이너(106)를 레일 시스템(108)을 가로질러 운송할 때 저장 컨테이너(106)를 수용 및 수납하기 위한 저장 격실 또는 공간을 포함한다. 저장 공간은, 도 2에 도시된 바와 같은 그리고 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같은, 운반체 본체(201a) 내의 중앙에 배열된 공동을 포함할 수 있다.
도 3a는 외팔보 구성을 갖는 컨테이너 핸들링 운반체(301)의 대안적인 구성을 도시한다. 그러한 운반체는, 기재 내용이 또한 본원에서 참조로 포함되는 예를 들어 NO317366에 구체적으로 설명되어 있다.
도 2에 도시된 중앙 공동 컨테이너 핸들링 운반체(201)는, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같이, 저장 컬럼(105)의 측방향 범위와 일반적으로 동일한 X 및 Y 방향을 따른 치수를 갖는 면적을 커버하는 풋프린트(footprint)를 가질 수 있다. 본원에서 사용된 '측방향'이라는 용어는 '수평'을 의미할 수 있다.
대안적으로, 중앙 공동 컨테이너 핸들링 운반체(101)는, 예를 들어 WO2014/090684A1에 개시된 바와 같이, 저장 컬럼(105)에 의해서 형성된 측방향 면적보다 큰 풋프린트를 가질 수 있다.
레일 시스템(108)은 전형적으로, 운반체의 휠이 내부로 삽입되는 홈을 갖는 레일을 포함한다. 대안적으로, 레일은 상향 돌출 요소를 포함할 수 있고, 운반체의 휠은 레일 이탈을 방지하기 위한 플랜지를 포함한다. 이러한 홈 및 상향 돌출 요소는 집합적으로 트랙으로서 알려져 있다. 각각의 레일은 하나의 트랙을 포함할 수 있거나, 각각의 레일은 2개의 평행한 트랙들(이하에서 도 1b 내지 도 1d와 관련하여 설명된, 소위 "이중 트랙")을 포함할 수 있다.
기재 내용이 본원에서 참조로 포함되는 WO2018146304는, X 및 Y 방향 모두를 따라서 평행한 트랙 및 레일을 포함하는 레일 시스템(108)의 전형적인 구성을 도시한다.
프레임워크 구조물(100) 내에서, 컬럼(105)의 대부분은 저장 컬럼(105)이고, 즉 저장 컨테이너(106)가 적층체(107)로 저장되는 컬럼(105)이다. 그러나, 일부 컬럼(105)이 다른 목적을 가질 수 있다. 도 1a에서, 컬럼(119 및 120)은, 프레임워크 구조물(100)의 외측으로부터 저장 컨테이너(106)에 접근할 수 있는 또는 저장 컨테이너가 프레임워크 구조물(100)의 내외로 전달될 수 있는 접근 스테이션(미도시)으로 운송될 수 있도록, 저장 컨테이너(106)를 드롭 오프(drop off) 및/또는 픽업(pick up)하기 위해서 컨테이너 핸들링 운반체(201, 301)에 의해서 이용되는 그러한 특별한-목적의 컬럼이다. 당업계에서, 그러한 위치는 일반적으로 '포트'로 지칭되고, 포트가 내부에 위치되는 컬럼은 '포트 컬럼'(119, 120)으로 지칭될 수 있다. 접근 스테이션으로의 운송은 임의의 방향일 수 있고, 즉 수평, 틸팅, 및/또는 수직일 수 있다. 예를 들어, 저장 컨테이너(106)는 프레임워크 구조물(100) 내에서 무작위적인 또는 지정된 컬럼(105) 내에 배치될 수 있고, 이어서 임의의 컨테이너 핸들링 운반체에 의해서 픽업될 수 있고, 접근 스테이션으로의 추가적인 운송을 위해서 포트 컬럼(119, 120)으로 운송될 수 있다. '틸팅된'이라는 용어는 수평과 수직 사이의 일반적인 운송 배향을 갖는 저장 컨테이너(106)의 운송을 의미한다는 것에 주목하여야 한다.
도 1a에서, 제1 포트 컬럼(119)은 예를 들어, 컨테이너 핸들링 운반체(201, 301)가 접근 또는 전달 스테이션으로 운송하기 위한 저장 컨테이너(106)를 드롭 오프할 수 있는, 지정된 드롭 오프 포트 컬럼일 수 있고, 제2 포트 컬럼(120)은, 접근 또는 전달 스테이션으로부터 운송된 저장 컨테이너(106)를 컨테이너 핸들링 운반체(201, 301)가 픽업할 수 있는 지정된 픽업 포트 컬럼일 수 있다.
접근 스테이션은 전형적으로, 제품 아이템이 저장 컨테이너(106)로부터 제거되거나 그 내부에 배치되는 픽킹(picking) 또는 보관 스테이션일 수 있다. 픽킹 또는 보관 스테이션에서, 저장 컨테이너(106)는 일반적으로 자동화된 저장 및 회수 시스템(1)으로부터 제거되지 않고, 다시 접근되는 경우에 프레임워크 구조물(100) 내로 복귀된다. 포트가 또한 저장 컨테이너를 다른 저장 설비로(예를 들어, 다른 프레임워크 구조물로 또는 다른 자동화된 저장 및 회수 시스템으로), 운송 운반체(예를 들어, 기차 또는 대형 트럭)로, 또는 생산 설비로 전달하기 위해서 사용될 수 있다.
컨베이어를 포함하는 컨베이어 시스템을 일반적으로 이용하여, 저장 컨테이너를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 운송한다.
포트 컬럼(119, 120) 및 접근 스테이션이 상이한 레벨들에 위치되는 경우에, 컨베이어 시스템은, 저장 컨테이너(106)를 포트 컬럼(119, 120)과 접근 스테이션 사이에서 수직으로 운송하기 위한 수직 구성요소를 갖춘 상승 장치를 포함할 수 있다.
컨베이어 시스템은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2014/075937A1에 설명된 바와 같이, 저장 컨테이너(106)를 상이한 프레임워크 구조물들 사이에서 전달하도록 배열될 수 있다.
도 1a에 개시된 컬럼(105) 중 하나 내에 저장된 저장 컨테이너(106)에 접근할 때, 컨테이너 핸들링 운반체(201, 301) 중 하나는 목표 저장 컨테이너(106)를 그 위치로부터 회수하도록 그리고 이를 드롭 오프 포트 컬럼(119)으로 운송하도록 명령을 받는다. 이러한 동작은, 컨테이너 핸들링 운반체(201, 301)를, 목표 저장 컨테이너(106)가 내부에 배치되는 저장 컬럼(105) 위의 위치로 이동시키는 것, 컨테이너 핸들링 운반체(201, 301) 상승 장치(미도시)를 이용하여 저장 컨테이너(106)를 저장 컬럼(105)으로부터 회수하는 것, 그리고 저장 컨테이너(106)를 드롭 오프 포트 컬럼(119)으로 운송하는 것을 포함한다. 목표 저장 컨테이너(106)가 적층체(107) 내에 깊이 위치되는 경우에, 즉 목표 저장 컨테이너(106) 위에 하나의 또는 복수의 다른 저장 컨테이너(106)가 배치된 경우에, 동작은 또한, 목표 저장 컨테이너(106)를 저장 컬럼(105)으로부터 상승시키기 전에, 위에-배치된 저장 컨테이너를 일시적으로 이동시키는 것을 포함한다. 당업계에서 종종 "디깅(digging)"으로 지칭되는 이러한 단계는, 목표 저장 컨테이너를 드롭 오프 포트 컬럼(119)으로 운송하기 위해서 추후에 이용되는 동일한 컨테이너 핸들링 운반체를 이용하여, 하나 또는 복수의 다른 협력 컨테이너 핸들링 운반체를 이용하여 수행될 수 있다. 대안적으로 또는 부가적으로, 자동화된 저장 및 회수 시스템(1)은, 저장 컨테이너를 저장 컬럼(105)으로부터 일시적으로 제거하는 과제를 위해서 특별히 지정된 컨테이너 핸들링 운반체를 가질 수 있다. 목표 저장 컨테이너(106)가 저장 컬럼(105)으로부터 제거되면, 일시적으로 제거된 저장 컨테이너가 원래의 저장 컬럼(105) 내로 재배치될 수 있다. 그러나, 대안적으로, 제거된 저장 컨테이너가 다른 저장 컬럼으로 재배치될 수 있다.
저장 컨테이너(106)를 컬럼(105) 중 하나 내에 저장하고자 할 때, 컨테이너 핸들링 운반체(201, 301) 중 하나는, 저장 컨테이너(106)를 픽업 포트 컬럼(120)으로부터 픽업하도록 그리고 이를 저장하고자 하는 저장 컬럼(105) 위의 위치로 운송하도록 명령을 받는다. 저장 컬럼 적층체(107) 내의 목표 위치에 또는 그 위에 배치된 임의의 저장 컨테이너가 제거된 후에, 컨테이너 핸들링 운반체(201, 301)는 저장 컨테이너(106)를 희망 위치에 배치한다. 이어서, 제거된 저장 컨테이너는 저장 컬럼(105) 내로 다시 하강될 수 있거나, 다른 저장 컬럼으로 재배치될 수 있다.
(도 3a에 개시된 바와 같은) 외팔보 구성을 갖는 종래 기술의 컨테이너 핸들링 운반체의 각각은 레일 시스템 상에서 적어도 2개의 그리드 셀을 점유하고, 이는, 종래 기술의 컨테이너 핸들링 운반체 중 2개가 이웃 그리드 셀들 상에서 서로를 지날 때, 적어도 4개의 그리드 셀이 점유되는 결과를 초래한다.
따라서, 본 발명의 목적은, 서로를 지나는 2개의 컨테이너 핸들링 운반체가 점유하는 그리드 셀의 수가 종래 기술의 해결책보다 적은, 컨테이너 핸들링 운반체, 및 연관된 저장 및 회수 시스템을 제공하는 것이다.
특히, 본 발명의 목적은, 동일 방향으로 배향된 외팔보 구성을 갖는 다른 컨테이너 핸들링 운반체를 지날 때, 레일 시스템 상에서 더 적은 수의 그리드 셀을 점유하는 외팔보 구성을 갖는 컨테이너 핸들링 운반체를 제공하는 것이다.
본 발명은 독립 청구항에 기재되어 있는 한편, 종속 청구항은 본 발명의 대안예를 설명한다.
본 발명은 2-차원적인 레일 시스템 상에서의 동작을 위한 컨테이너 핸들링 운반체에 관한 것으로서, 2-차원적인 레일 시스템은 프레임 구조물의 상단부를 가로질러 제1 방향으로 컨테이너 핸들링 운반체의 이동을 안내하도록 배열된 제1 세트의 평행 레일, 및 제1 방향에 수직인 제2 방향으로 컨테이너 핸들링 운반체의 이동을 안내하기 위한, 제1 세트의 레일에 수직으로 배열된, 제2 세트의 평행 레일을 포함하고, 제1 및 제2 세트의 평행 레일은 레일 시스템을 복수의 그리드 셀(grid cell)로 분할하고, 컨테이너 핸들링 운반체는:
- 컨테이너 핸들링 운반체를 제1 및 제2 방향으로 레일 시스템을 따라 안내하기 위한 세트의 휠을 포함하는 휠 기부 유닛;
- 본체 유닛으로서:
휠 기부 유닛 상에 제공되는 하부 섹션으로서, 그리드 셀 중 하나의 수평 범위 이하인 수평 범위를 갖는 풋프린트 및 제1 높이에 위치되는 상단 표면을 가지는, 하부 섹션;
하부 섹션으로부터 수직으로 연장되는 지지 섹션으로서, 하부 섹션의 풋프린트보다 작은 수평 범위의 풋프린트를 갖는, 지지 섹션; 및
지지 섹션으로부터 하부 섹션의 풋프린트를 넘어서 수평으로 연장되는 외팔보 섹션을 포함하는, 본체 유닛;
- 본체 유닛의 외팔보 섹션으로부터 매달린 상승 프레임을 포함하는 상승 장치로서, 상승 프레임은, 상승 프레임이 외팔보 섹션에 인접하여 상부 위치에 도킹될(docked) 때, 제2 높이에서 최하부 부분을 가지는, 상승 장치를 포함하고,
- 상승 프레임의 최하부 부분의 제2 높이는, 상기 상승 프레임이 그 상부 위치에서 도킹될 때, 본체 유닛의 하부 섹션의 상단 표면의 제1 높이 위에 있다.
사실상, 상승 프레임의 최하부 부분의 제2 높이는, 상승 프레임이 그 상부 위치에서 도킹될 때, 본체 유닛의 하부 섹션의 상단 표면의 제1 높이 위에 있다. 따라서, 제1 및 제2 컨테이너 운반체가 인접 그리드 셀들 상에서 서로를 지날 때, 제1 컨테이너 핸들링 운반체의 도킹된 상승 프레임의 최하부 부분은 제2 컨테이너 핸들링 운반체의 본체 유닛의 하부 섹션의 상단 표면 위를 지날 수 있다.
이러한 방식으로, 동일 배향을 갖는 자동화된 저장 및 회수 시스템의 2개의 컨테이너 핸들링 운반체는 서로를 지날 때 더 적은 수의 그리드 셀을 점유할 수 있는데, 이는 하나의 컨테이너 핸들링 운반체의 외팔보 섹션이 (간극을 가지고) 다른 컨테이너 핸들링 운반체의 하부 섹션 및 휠 기부 유닛 위를 지날 수 있기 때문이다. 다시 말해서, 하나의 컨테이너 핸들링 운반체의 외팔보 섹션은, 지나가는 다른 컨테이너 핸들링 운반체의 하부 섹션 및 휠 기부 유닛과 수직으로 중첩될 것이다.
지지 섹션의 수직 연장 범위는 제1 높이와 제2 높이 사이의 차이를 결정한다. 지지 섹션이 비교적 큰 연장 범위를 갖는 경우, 제1 높이와 제2 높이 사이의 차이는 비교적 크다. 유사하게, 지지 섹션이 비교적 작은 연장 범위를 갖는 경우, 제1 높이와 제2 높이 사이의 차이는 비교적 작다. 어떠한 경우에도, 지지 섹션은, 2개의 컨테이너 핸들링 운반체가 상승 프레임의 최하부 부분과 하부 섹션의 상단 표면 사이에서 간극을 가지고 서로를 지날 수 있도록 하는 연장 범위를 가져야 한다. 그러한 간극은, 컨테이너 핸들링 운반체의 가속 및 감속으로 인해서 그 상부 위치에서 도킹될 때, 적어도 상승 프레임의 예상 수직 이동과 동일할 수 있다. 일 예에서, 2개의 컨테이너 핸들링 운반체들 사이의 간극은 몇 밀리미터로부터 몇 센티미터까지의 범위일 수 있다.
상단 표면의 (X 및 Y 방향을 따른) 수평 범위는, 지지 섹션을 넘어서 수평으로 연장되는 외팔보 섹션의 일부의 수평 범위와 동일하거나 실질적으로 동일할 수 있다.
휠 기부 유닛 및 본체 유닛은 서로 부착될 수 있는 모듈들일 수 있다. 본체 유닛은 일부 다른 방식으로 휠 기부 유닛의 상부 표면에 장착되거나 그에 부착될 수 있다. 대안적으로, 휠 기부 유닛 및 본체 유닛은 하나의 단편으로 형성될 수 있고, 즉 하나의 공통 유닛을 형성할 수 있다.
휠 기부 유닛은 휠 배열체를 특징으로 할 수 있고, 이러한 휠 배열체는 레일 시스템 상에서 제1 방향으로 이동하기 위한 제1 세트의 휠 및 제1 방향에 수직인 제2 방향으로 이동하기 위한 제2 세트의 휠을 갖는다. 각각의 세트의 휠은 휠 기부 유닛의 대향 측면들에 배열된 2개의 휠의 쌍을 포함한다. 휠 기부 유닛이 레일 시스템 상으로 이동할 수 있는 방향을 변경하기 위해서, 세트의 휠 중 하나가 휠 변위 조립체에 연결된다. 휠 변위 조립체는, 희망 방향으로 이동하는 세트의 휠 만이 레일 시스템과 접촉되도록, 연결된 세트의 휠을 다른 세트의 휠에 대해서 상승 및 하강시킬 수 있다. 휠 변위 조립체는 전기 모터에 의해서 구동된다. 또한, 재충전 가능 배터리에 의해서 전력을 공급 받는 2개의 전기 모터가 세트의 휠에 연결되어, 휠 기부 유닛을 희망 방향으로 이동시킬 수 있다.
제1 높이는, 하부 섹션이 휠 기부 유닛에 장착될 때, 레일 시스템의 상단부로부터 하부 섹션의 상단 표면의 상단부까지의 거리로서 정의될 수 있다.
제2 높이는 레일 시스템의 상단부로부터 상승 프레임의 최하부 부분까지의 거리로서 정의될 수 있다.
지지 섹션은 저장 컨테이너보다 높은 높이로 연장될 수 있고, 제2 높이와 제1 높이 사이의 차이는, 작은 간극에 더하여, 적어도 저장 컨테이너의 높이에 상응할 수 있다. 이러한 구성의 하나의 장점은, 로봇들, 즉 컨테이너 핸들링 운반체들은, 이들 중 하나 또는 둘 모두가 저장 컨테이너를 이송하거나 어느 것도 이송하지 않는 것과 관계없이, 중첩되어 서로를 지날 수 있다는 것이다.
상승 장치는 상승 장치 모터 및 적어도 2개의 상승 샤프트를 포함할 수 있다. 적어도 2개의 상승 샤프트는 외팔보 섹션 내에 배열될 수 있고, 상승 장치 모터는 하부 섹션 내에 배열될 수 있다. 상승 장치 모터 및 적어도 2개의 상승 샤프트는 가요성 힘 전달 요소를 통해서 서로 연결될 수 있다. 힘 전달 요소는 회전 이동을 상승 장치 모터와 상승 샤프트 사이에서 전달할 수 있는 벨트, 체인, 밴드 또는 다른 비교적 가요적인 구성요소일 수 있다.
상승 장치는 저장 컨테이너를 해제 가능하게 파지하도록 구성된 파지 장치, 및 전원, 예를 들어 독립적인 재충전 가능 배터리 또는 상승 장치 모터를 구동하기 위한 휠의 변위를 위해서 사용되는 동일 배터리를 더 포함할 수 있다. 컨테이너 핸들링 운반체의 안정성을 높이기 위해서, 배터리는 하부 섹션 또는 휠 기부 유닛 내에(또는 둘 모두 내에, 예를 들어 하부 섹션과 휠 기부 유닛 사이의 일부 중첩이 있는 곳 내에) 배열될 수 있다.
상승 장치는 상승 장치를 상승 및 하강시키기 위한 상승 장치 모터 및 적어도 2개의 상승 샤프트를 포함하고, 상승 장치 모터 및 적어도 2개의 상승 샤프트는 외팔보 섹션 내에 배열될 수 있다. 상승 장치 모터는 무브러시 DC 모터를 포함할 수 있다. (영구 자석을 이용하는) 영구 자석 동기 모터, 및 내용이 본원에서 참조로 포함되는 WO 2019/137870 A1(출원인: Autostore Technology AS)에 설명된 바와 같은 (어떠한 영구 자석도 이용하지 않는) 샌드위치형 릴럭턴스 모터를 포함하는, 다양한 유형의 무브러시 DC 모터가 알려져 있다. 그러나, 상승 장치 모터는 다른 형태의 전기 모터(들)를 또한 포함할 수 있다.
본체 유닛은, 하부 섹션, 지지 섹션, 및 외팔보 섹션을 함께 연결하는 (예를 들어, 본체 유닛 쪽에서 볼 때 S-형상인) S-형상의 하우징을 포함할 수 있다.
일 양태에서, 본체 유닛의 하부 섹션의 풋프린트는 실질적으로 휠의 폭 만큼 또는 휠의 폭과 동일한 만큼 휠 기부 유닛의 풋프린트에 대해서 변위될 수 있다. 폭 치수는 휠의 축방향의 치수이다. 하부 섹션은, 휠 기부 유닛이 제1 트랙(또는 그리드 개구부에 가장 가까운 트랙) 위에 배치된 휠을 가질 때, 예를 들어 컨테이너 핸들링 운반체가 상승 프레임을 프레임 구조물의 저장 컬럼의 내/외로 하강/상승시키기 위해서 배치될 때, 외팔보 섹션 아래의 레일 시스템의 제2 트랙의 외부 연부로부터 그리고 하부 섹션의 대향 측면 상의 레일 시스템의 제1 트랙의 내부 연부로부터 수직으로 연장되도록 배치될 수 있다. 풋프린트는, 해당 섹션의 평면도에서 볼 때, 외부 치수로서 정의된다.
상승 프레임은 상승 밴드 상에서 매달릴 수 있고, 상승 프레임은 수평으로 연장될 수 있고 파지 장치 및 모서리 안내부를 포함할 수 있다. 모서리 안내부의 최하부 지점은 상승 프레임의 최하부 부분을 제공할 수 있고, 그에 따라 하부 섹션의 상부 표면의 제1 높이 위를 또는 위쪽을 지나기 위한 최소 제2 높이와 관련하여 이러한 지점을 고려할 필요가 있다.
자동화된 저장 및 회수 시스템이 더 설명되고, 이러한 자동화된 저장 및 회수 시스템은 2-차원적인 레일 시스템을 포함하고, 2-차원적인 레일 시스템은 프레임 구조물의 상단부를 가로질러 제1 방향으로 컨테이너 핸들링 운반체의 이동을 안내하도록 배열된 제1 세트의 평행 레일, 및 제1 방향에 수직인 제2 방향으로 컨테이너 핸들링 운반체의 이동을 안내하기 위한, 제1 세트의 레일에 수직으로 배열된, 제2 세트의 평행 레일을 포함하고, 제1 및 제2 세트의 평행 레일은 레일 시스템을 복수의 그리드 셀로 분할하고, 자동화된 저장 및 회수 시스템은 전술한 바와 같은 복수의 컨테이너 핸들링 운반체를 포함한다.
동일한 배향을 가지는, 자동화된 저장 및 회수 시스템의 2개의 컨테이너 핸들링 운반체들은, 서로를 지날 때, 총 3개의 그리드 셀을 점유할 수 있다.
자동화된 저장 및 회수 시스템의 2개의 컨테이너 핸들링 운반체, 즉 제1 컨테이너 핸들링 운반체 및 제2 컨테이너 핸들링 운반체는, 제1 및 제2 컨테이너 운반체들이 인접 그리드 셀들 상에서 서로를 지날 때, 제1 컨테이너 핸들링 운반체의 도킹된 상승 프레임의 최하부 부분이 제2 컨테이너 핸들링 운반체의 본체 유닛의 하부 섹션의 상단 표면을 지날 수 있도록, 구성될 수 있다. 이는, 예를 들어, 상단 표면의 (X 및 Y 방향을 따른) 수평 범위가, 지지 섹션을 넘어서 수평으로 연장되는 외팔보 섹션의 일부의 (X 및 Y 방향을 따른) 수평 범위와 동일하도록 또는 실질적으로 동일하도록 구성하는 것에 의해서 이루어질 수 있다.
제1 세트의 레일 및/또는 제2 세트의 레일은 단일 트랙 또는 2개의 단일 트랙을 포함하는 이중 트랙을 포함할 수 있고, 그리드 셀은 단일 그리드 개구부를 둘러싸고 그에 가장 근접한 제1 및 제2 방향을 따른 제1 및 제2 세트의 레일의 단일 트랙에 의해서 점유되는 지역과 함께, 제1 세트의 레일 및 제2 세트의 레일에 의해서 경계 지어지는 그리드 개구부에 의해서 점유되는 수평 지역으로서 정의될 수 있다.
휠 기부 유닛은 하부 그리드 셀로서의 그리드 셀의 제1 및 제2 방향을 따른 수평 범위와 동일한 풋프린트를 가질 수 있다. 다시 말해서, 휠 기부 유닛은 단일 그리드 셀의 풋프린트를 가질 수 있다.
컨테이너 핸들링 운반체 중 적어도 하나는, 다른 컨테이너 핸들링 운반체를 지날 때, 저장 컨테이너를 이송할 수 있다. 일 양태에서, 양 컨테이너 핸들링 운반체들은, 서로를 지날 때, (정규 크기의) 저장 컨테이너를 이송할 수 있다. 2개의 컨테이너 핸들링 운반체들 사이의 간극은 몇 밀리미터로부터 몇 센티미터까지의 범위일 수 있다.
저장 컨테이너가 이송될 때 그 최하부 지점은 하부 섹션의 제1 높이보다 높을 수 있다.
일 방향을 따른 지지 섹션의 폭은 레일 및/또는 2개의 트랙의 폭에 상응할 수 있다.
자동화된 저장 및 회수 시스템은, 제2 외팔보 섹션에 대향하여 배열된 제1 외팔보 섹션을 포함하는 적어도 하나의 이중 컨테이너 핸들링 운반체를 더 포함할 수 있다. 적어도 제1 컨테이너 핸들링 운반체가 제1 배향을 가질 수 있고, 적어도 제2 컨테이너 핸들링 운반체가 제1 배향에 반대되는 제2 배향을 가질 수 있으며, 이중 컨테이너 핸들링 운반체 그리고 제1 및 제2 컨테이너 핸들링 운반체는, 동시에 서로를 지날 때, 총 5개의 그리드 셀을 점유할 수 있다.
상대적인 용어인 "상부", "하부", "아래", "위", "더 높음" 등은 그 일반적인 의미로 그리고 데카르트 좌표계에서 볼 수 있는 바와 같이 이해될 것이다.
이하에서, 청구된 시스템 및 운반체의 실시형태에 대한 완전한 이해를 제공하기 위해, 다수의 특정 세부사항이 단지 예로서 도입된다. 그러나, 당업자는, 이러한 실시형태가 구체적인 세부사항 중 하나 이상이 없이, 또는 다른 구성요소, 시스템 등과 함께 실시될 수 있는 것을 이해할 것이다. 다른 경우에, 개시된 실시형태의 양태를 불명료하게 하지 않기 위해서, 잘 알려진 구조 또는 동작을 도시하지 않았거나, 구체적으로 설명하지 않았다.
이하의 도면은 본 발명의 이해를 돕기 위해서 첨부된 것이다.
도 1a은 종래 기술의 자동화된 저장 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 1b 내지 도 1d는 컨테이너 핸들링 운반체 레일 시스템의 상면도이고, 도 1b는 단일 트랙 레일 시스템을 도시하고, 도 1c는 이중 트랙 레일 시스템을 도시하며, 도 1d는 표시된 컨테이너 핸들링 운반체 그리드 셀의 폭 및 길이를 갖는 이중 레일 시스템을 도시한다.
도 2는 저장 컨테이너를 내부에서 이송하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3a는 저장 컨테이너를 아래에서 이송하기 위한 외팔보를 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3b 및 도 3c는 컨테이너 핸들링 운반체를 위한 예시적인 휠 기부 유닛을 도시한다.
도 4a는 휠 기부 유닛 및 본체 유닛을 포함하는 본 발명에 따른 컨테이너 핸들링 운반체의 단순화된 측면도이고 본체 유닛은 하부 섹션, 지지 섹션, 및 외팔보 섹션을 포함한다.
도 4b는 본 발명에 따른 컨테이너 핸들링 운반체의 사시도이고, 여기에서 보호 커버를 제거하여, 컨테이너 핸들링 운반체의 본체 유닛의 하부 섹션, 지지 섹션 및 외팔보 섹션 내의 구성요소의 셋업을 보다 양호하게 도시하였다.
도 4c는 도 4b의 상면도이다.
도 4d 내지 도 4i는 상승 샤프트들의 반대 회전을 제공하는 상이한 셋업들의 예시적인 측면도이다.
도 5는 본체 유닛의 외팔보 섹션의 예이고, 외팔보 섹션의 일부를 형성할 수 있는 부분들을 도시한다.
도 6a 내지 도 6c는 서로를 지나는 2개의 컨테이너 핸들링 운반체의 제1 실시형태의 상이한 도면들을 도시하고, 여기에서 컨테이너 핸들링 운반체 중 하나 만이 통과 중에 저장 컨테이너를 이송할 수 있다.
도 7a 내지 도 7c는 서로를 지나는 2개의 컨테이너 핸들링 운반체의 제2 실시형태의 상이한 도면들을 도시하고, 여기에서 2개의 컨테이너 핸들링 운반체 모두가 통과 중에 저장 컨테이너를 이송할 수 있다.
도 7d는, 저장 컨테이너를 이송하지 않을 때, 도 7a 내지 도 7c의 제2 실시형태에 따른 컨테이너 핸들링 운반체를 도시한다.
도 8은 대향 단부들 상에서 2개의 외팔보 섹션을 가지는 이중 컨테이너 핸들링 운반체뿐만 아니라 서로 반대되는 배향을 갖는 2개의 컨테이너 핸들링 운반체를 갖는, 그에 따라 3개의 컨테이너 핸들링 운반체가 서로를 지날 때 5개의 셀만을 점유하는 실시형태를 도시한다.
도면에서, 달리 명시적으로 기술되거나 문맥으로부터 암시적으로 이해되지 않는 한, 유사한 참조 번호들을 이용하여 유사한 부품, 요소, 또는 특징부를 표시하였다.
도 1a은 종래 기술의 자동화된 저장 및 회수 시스템의 프레임워크 구조물의 사시도이다.
도 1b 내지 도 1d는 컨테이너 핸들링 운반체 레일 시스템의 상면도이고, 도 1b는 단일 트랙 레일 시스템을 도시하고, 도 1c는 이중 트랙 레일 시스템을 도시하며, 도 1d는 표시된 컨테이너 핸들링 운반체 그리드 셀의 폭 및 길이를 갖는 이중 레일 시스템을 도시한다.
도 2는 저장 컨테이너를 내부에서 이송하기 위한 중앙 배열 공동을 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3a는 저장 컨테이너를 아래에서 이송하기 위한 외팔보를 가지는 종래 기술의 컨테이너 핸들링 운반체의 사시도이다.
도 3b 및 도 3c는 컨테이너 핸들링 운반체를 위한 예시적인 휠 기부 유닛을 도시한다.
도 4a는 휠 기부 유닛 및 본체 유닛을 포함하는 본 발명에 따른 컨테이너 핸들링 운반체의 단순화된 측면도이고 본체 유닛은 하부 섹션, 지지 섹션, 및 외팔보 섹션을 포함한다.
도 4b는 본 발명에 따른 컨테이너 핸들링 운반체의 사시도이고, 여기에서 보호 커버를 제거하여, 컨테이너 핸들링 운반체의 본체 유닛의 하부 섹션, 지지 섹션 및 외팔보 섹션 내의 구성요소의 셋업을 보다 양호하게 도시하였다.
도 4c는 도 4b의 상면도이다.
도 4d 내지 도 4i는 상승 샤프트들의 반대 회전을 제공하는 상이한 셋업들의 예시적인 측면도이다.
도 5는 본체 유닛의 외팔보 섹션의 예이고, 외팔보 섹션의 일부를 형성할 수 있는 부분들을 도시한다.
도 6a 내지 도 6c는 서로를 지나는 2개의 컨테이너 핸들링 운반체의 제1 실시형태의 상이한 도면들을 도시하고, 여기에서 컨테이너 핸들링 운반체 중 하나 만이 통과 중에 저장 컨테이너를 이송할 수 있다.
도 7a 내지 도 7c는 서로를 지나는 2개의 컨테이너 핸들링 운반체의 제2 실시형태의 상이한 도면들을 도시하고, 여기에서 2개의 컨테이너 핸들링 운반체 모두가 통과 중에 저장 컨테이너를 이송할 수 있다.
도 7d는, 저장 컨테이너를 이송하지 않을 때, 도 7a 내지 도 7c의 제2 실시형태에 따른 컨테이너 핸들링 운반체를 도시한다.
도 8은 대향 단부들 상에서 2개의 외팔보 섹션을 가지는 이중 컨테이너 핸들링 운반체뿐만 아니라 서로 반대되는 배향을 갖는 2개의 컨테이너 핸들링 운반체를 갖는, 그에 따라 3개의 컨테이너 핸들링 운반체가 서로를 지날 때 5개의 셀만을 점유하는 실시형태를 도시한다.
도면에서, 달리 명시적으로 기술되거나 문맥으로부터 암시적으로 이해되지 않는 한, 유사한 참조 번호들을 이용하여 유사한 부품, 요소, 또는 특징부를 표시하였다.
이하에서, 단지 예로서 그리고 첨부 도면을 참조하여 본 발명의 실시형태를 더 구체적으로 설명할 것이다. 그러나, 도면은 본 발명을 도면에 도시된 청구-대상으로 제한하기 위한 것이 아님을 이해하여야 할 것이다.
자동화된 저장 및 회수 시스템(1)의 프레임워크 구조물(100)은 도 1a 내지 도 1d와 관련하여 전술한 종래 기술의 프레임워크 구조물(100)에 따라 구성되고, 즉 많은 수의 직립 부재(102) 및 직립 부재(102)에 의해서 지지되는 많은 수의 수평 부재(103)로 구성되고, 또한 프레임워크 구조물(100)은 X 방향 및 Y 방향의 제1 상부 레일 시스템(108)을 포함한다.
프레임워크 구조물(100)은 부재들(102, 103) 사이에 제공된 저장 컬럼(105) 형태의 저장 격실을 더 포함하고, 저장 컨테이너(106)는 저장 컬럼(105) 내에서 적층체(107)로 적층될 수 있다.
프레임워크 구조물(100)은 임의의 크기일 수 있다. 특히, 프레임워크 구조물은 도 1a에 개시된 것보다 상당히 더 넓을 수 있고/있거나 더 길 수 있고/있거나 더 깊을 수 있다는 점이 이해된다. 예를 들어, 프레임워크 구조물(100)은 700 x 700 컬럼 초과의 수평 범위 및 12개 초과의 컨테이너의 저장 깊이를 가질 수 있다.
레일 시스템(108)은, 도 1b에 도시된 바와 같이, 단일 레일(단일 트랙으로도 지칭됨) 시스템일 수 있다. 대안적으로, 레일 시스템(108)은 도 1c에 도시된 바와 같은 이중 레일 시스템(이중 트랙으로도 지칭됨)일 수 있고, 그에 따라, 다른 컨테이너 핸들링 운반체(201)가 해당 행에 이웃하는 그리드 컬럼 위에 배치되는 경우에도, 접근 개구부/그리드 컬럼(112)에 의해 형성된 측방향 지역에 일반적으로 상응하는 풋프린트를 갖는 컨테이너 핸들링 운반체(201)가 그리드 컬럼의 행을 따라 이동할 수 있게 한다. 단일 및 이중 트랙 시스템 모두, 또는 단일 레일 시스템(108) 내의 단일 및 이중 트랙 배열체를 포함하는 조합은 복수의 직사각형의 그리고 균일한 그리드 위치 또는 그리드 셀(122)을 포함하는 수평 평면(P)에서 그리드 패턴을 형성하며, 여기서 각각의 그리드 셀(122)은 레일(110)의 제1 세트의 트랙(110a, 110b)의 쌍 및 레일(111)의 제2 세트의 트랙(111a, 111b)의 쌍에 의해 경계 지어지는 그리드 개구부(115)를 포함한다. 도 1c에서, 그리드 셀(122)은 쇄선 상자에 의해서 표시되어 있다. 예를 들어, 알루미늄으로 제조된 레일-기반의 시스템의 섹션은 레일이고, 레일의 상부 표면 상에는, 운반체의 휠이 내부에서 주행하는 트랙의 쌍이 위치된다. 그러나, 이러한 섹션들은 트랙을 각각 가지는 별도의 레일들일 수 있다.
결과적으로, 트랙(110a 및 110b)은 X 방향으로 연장되는 그리드 셀의 평행 행들을 형성하는 레일의 쌍을 형성하고, 트랙(111a 및 111b)은 Y 방향으로 연장되는 그리드 셀의 평행 행들을 형성하는 레일의 쌍을 형성한다.
도 1d에 도시된 바와 같이, 각각의 그리드 셀(122)은, 일반적으로 30 내지 150 cm의 간격 이내의 폭(W c ), 및 일반적으로 50 내지 200 cm의 간격 이내의 길이(L c )를 갖는다. 각각의 그리드 개구부(115)는, 일반적으로 그리드 셀(122)의 폭(W c ) 및 길이(L c )보다 2 내지 10 cm 더 작은 폭(W o ) 및 길이(L o )를 갖는다.
X 및 Y 방향으로, 이웃하는 그리드 셀들이 서로 접촉되어 배열될 수 있고, 그에 따라 그 사이에는 공간이 없다.
도 3a는 저장 컨테이너를 아래에서 이송하기 위한 외팔보를 가지는 종래 기술의 컨테이너 핸들링 운반체(301)의 사시도이다.
본 발명에 따른 컨테이너 핸들링 운반체(401)를 위한 예시적인 휠 기부 유닛이 도 3b 및 도 3c에 도시되어 있다. 휠 기부 유닛(2)은 휠 배열체(32a, 32b)를 특징으로 하고, 이러한 휠 배열체는 레일 시스템(108) 상에서 제1 방향으로 이동하기 위한 제1 세트의 휠(32a) 및 제1 방향에 수직인 제2 방향으로 이동하기 위한 제2 세트의 휠(32b)을 갖는다. 각각의 세트의 휠은 휠 기부 유닛(2)의 대향 측면들에 배열된 2개의 휠의 쌍을 포함한다. 휠 기부 유닛이 레일 시스템 상으로 이동할 수 있는 방향을 변경하기 위해서, 세트의 휠(32b) 중 하나가 휠 변위 조립체(7)에 연결된다. 휠 변위 조립체는, 희망 방향으로 이동하는 세트의 휠 만이 레일 시스템과 접촉되도록, 연결된 세트의 휠(32b)을 다른 세트의 휠(32a)에 대해서 상승 및 하강시킬 수 있다. 휠 변위 조립체(7)는 전기 모터(8)에 의해서 구동된다. 또한, 재충전 가능 배터리(6)에 의해서 전력을 공급 받는 2개의 전기 모터(4, 4')가 세트의 휠(32a, 32b)에 연결되어, 휠 기부 유닛을 희망 방향으로 이동시킨다.
도 3b 및 도 3c를 더 참조하면, 휠 기부 유닛(2)의 수평 주변부는, 2개의 휠 기부 유닛들(2)이 레일 시스템(108)의 임의의 인접 그리드 셀 상에서 서로 통과할 수 있도록, 그리드 셀에 의해서 형성된 수평 면적 내에 피팅되는(fit) 치수를 갖는다. 다시 말해서, 휠 기부 유닛(2)은, 예를 들어 기재 내용이 본원에서 참조로 포함되는 WO2015/193278A1에서 설명된 바와 같이, 그리드 셀의 수평 면적과 일반적으로 동일한, 풋프린트, 즉 X 및 Y 방향의 범위, 즉 X 및 Y 방향을 따른 그리드 셀의 범위를 가질 수 있다.
도 4a는 휠 기부 유닛(2) 및 본체 유닛(410)을 포함하는 본 발명의 실시형태에 따른 컨테이너 핸들링 운반체(401)의 단순화된 측면도이고, 본체 유닛(410)은 하부 섹션(411), 지지 섹션(412), 및 외팔보 섹션(413)을 포함한다.
도 3b 및 도 4a를 참조하면, 휠 기부 유닛(2)은, 컨테이너 핸들링 운반체(401)의 본체 유닛(410)에 연결되는 연결 인터페이스로서 구성된 상단 패널/플랜지(9)(즉, 상부 표면)를 갖는다. 상단 패널(9)은 중심 개구부(20)를 가지고, 본체 유닛(401)의 하부 섹션(411) 내의 상응 관통-홀을 통한 볼트 연결에 적합한 다수의 관통-홀(10)(즉, 연결 요소)을 특징으로 한다. 다른 실시형태에서, 상단 패널(9)의 연결 요소는 예를 들어 하부 섹션(4111)의 관통-홀과 상호 작용하기 위한 나사산형 핀일 수 있다. 중심 개구부가 휠 기부 유닛(2)의 내부 구성요소, 예를 들어 재충전 가능 배터리(6) 및 전자 제어 시스템(21)에 대한 접근을 제공하기 때문에, 중심 개구부(20)의 존재가 유리하다.
도 4a를 더 참조하면, 본체 유닛(410)은, 하부 섹션(411), 지지 섹션(412), 및 외팔보 섹션(413)을 함께 연결하는 S-형상의 하우징을 포함하는 것으로 개시되어 있다. 도 4a의 컨테이너 핸들링 운반체(401)는 도 1a 내지 도 1d와 관련하여 설명한 된 바와 같이 레일 시스템(108) 상에서 동작될 수 있고, 휠 기부 유닛(2) 및 본체 유닛(410)을 포함한다. 휠 기부 유닛(2)은 컨테이너 핸들링 운반체(401)를 제1 및 제2 방향(X, Y)으로 레일 시스템(108)을 따라 안내하기 위한 세트의 휠(32a, 32b)을 포함한다. 본체 유닛(410)은 하부 섹션(411), 지지 섹션(412), 및 외팔보 섹션(413)을 포함한다. 하부 섹션(411)은 휠 기부 유닛(2)의 상부 표면에 장착된다. 하부 섹션(411)은, 그리드 셀(122)의 하나의 수평 범위 이하인 수평 범위를 가지는 풋프린트 및 제1 높이(h1)에 있는 상단 표면을 갖는다. 즉, 제1 높이(h1)는, 하부 섹션이 휠 기부 유닛(2) 상에 장착될 때, 레일 시스템(108)의 상단부로부터, 하부 섹션(411)의 상단 표면의 상단부까지까지의 거리이다. 지지 섹션(412)은 하부 섹션(411)으로부터 수직으로 연장되고, 하부 섹션(411)의 풋프린트보다 작은 수평 범위의 풋프린트를 갖는다. 지지 섹션(412)의 폭(즉, X 방향 연장 범위)은 (X 방향을 따른) 하부 섹션(411)의 폭과 같을 수 있다. Y 방향을 따른 지지 섹션(412)의 연장 범위는 Y 방향을 따른 하부 섹션(411)의 연장 범위보다 작다.
또한, 도 4c를 참조하면, 위로부터 평면도를 볼 때, 지지 섹션(412)의 풋프린트는 하부 섹션(411)의 풋프린트 내에 포함된다. 다시 말해서, 도 4a 내지 도 4c에 개시된 바와 같이, 지지 섹션(412)은 하부 섹션(411)을 넘어서 연장되지 않는다. 외팔보 섹션(413)은 지지 섹션(412)으로부터 하부 섹션(411)의 풋프린트를 넘어서 수평으로 연장되고, 외팔보 섹션(413)으로부터 매달린 상승 장치(414)를 포함한다. 상승 장치(414)는, 상승 프레임(415)이 외팔보 섹션(413)에 인접한 상부 위치에 도킹될 때(도 4a 및 도 4b는 상승 프레임(415)의 도킹된 위치를 도시한다), 제2 높이(h2)의 최하부 부분을 가지는 상승 프레임(415)을 포함한다. 즉, 제2 높이(h2)는 레일 시스템(108)의 상단부로부터 상승 프레임(415)의 최하부 부분까지의 거리이다. 상승 프레임(415)은 상승 밴드(419)를 통해서 외팔보 섹션(413)으로부터 매달린다. 상승 프레임(415)은, 상승 프레임을 저장 컨테이너(106)의 상보적인 상승 홀에 연결하여 저장 컨테이너(106)의 상승 및 하강을 가능하게 하기 위한, 그 하부 표면으로부터 연장되는 파지 장치(420)를 포함할 수 있다. 또한, 상승 프레임(415)은 상승 프레임(415)의 하부 표면의 모서리에 배열된 안내부(421)를 포함할 수 있고, 그에 따라 상승 프레임(41)의 파지 장치(420)를 저장 컨테이너(106) 상의 상보적인 상승 홀에 대해서 정렬시킬 수 있다. 많은 상황에서, 안내부(421) 또는 파지 장치(420)는, 제2 높이(h2)가 이러한 구성요소 중 임의의 구성요소의 최하부 부분이 되도록, 상승 프레임(415)의 최하부 부분을 구성할 수 있다. 그러나, 본 발명에 따라, 상승 프레임(415)의 최하부 부분의 제2 높이(h2)는, 상승 프레임(415)이 그 상부 위치에서 도킹되었을 때, 본체 유닛(410)의 하부 섹션(411)의 상단 표면의 제1 높이(h1)보다 항상 위에 있다.
제1 및 제2 컨테이너 운반체(401)가 인접 그리드 셀(122) 상에서 서로를 지날 때, 제1 컨테이너 핸들링 운반체(401)의 도킹된 상승 프레임(415)의 최하부 부분이 제2 컨테이너 핸들링 운반체(401)의 본체 유닛(410)의 하부 섹션(411)의 상단 표면 위를 지날 수 있도록 보장함으로써, 제1 및 제2 컨테이너 핸들링 운반체(401)는, 종래 기술의 해결책에서 필요하였던 것보다 더 적은 그리드 셀을 함께 점유하면서, 서로를 통과할 수 있다.
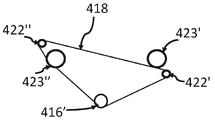
도 4b는 본 발명의 실시형태에 따른 컨테이너 핸들링 운반체(401)의 사시도이고, 여기에서 보호 커버를 제거하여, 컨테이너 핸들링 운반체(401)의 본체 유닛(410)을 구성하는 하부 섹션(411), 지지 섹션(412) 및 외팔보 섹션(413) 내의 구성요소의 셋업을 보다 양호하게 도시하였다. 도 4b의 실시형태에서, 상승 장치(414)는 상승 장치 모터(416') 및 적어도 2개의 상승 샤프트(417', 417")를 포함하는 것으로 개시되어 있다. 2개의 상승 샤프트(417', 417")는 외팔보 섹션(413) 내에서 평행하게 배열된다. 상승 프레임(415)에 연결된 상승 밴드(419)는 상승 샤프트(417', 417") 상으로 감기거나 그로부터 풀리고, 그에 의해서 상승 프레임(416) 및 상승 프레임(415)에 의해서 이송되는 임의의 저장 컨테이너(106)를 상하로 이동시킨다. 상승 샤프트 휠(423', 423")은 상승 샤프트(417)의 각각의 단부에 배열되고, 상승 샤프트(417)와 함께 각각 동작한다. 도 4b에 도시된 바와 같이, 상승 장치 모터(416')는 하부 섹션(411) 내에 배열된다. 상승 장치 모터(416') 및 2개의 상승 샤프트(417)는, 상승 샤프트 휠(423', 423") 및 도르래(422)를 통해서 연장되는 무한 가요성 힘 전달 요소(418)를 통해서 서로 연결되고, 그에 따라 제1 및 제2 상승 샤프트(417)가 동일 방향으로 동시에 회전되도록 보장한다. 상승 장치 모터(416')에 전력을 공급하기 위한 임의의 필수 전원(미도시)이 하부 섹션(413) 내에 배열될 수 있고, 그에 따라 무거운 저장 컨테이너(106)를 상승시키는 경우에 및/또는 컨테이너 핸들링 운반체(401)의 너무 큰 가속/감속의 결과로서 컨테이너 핸들링 운반체가 틸팅될 위험이 감소된 바람직한 중력 중심을 획득할 수 있다.
상승 프레임(415)은 상승 프레임(415)의 하부 표면의 모서리에 배열된 안내부(421)와 함께 도시되어 있고, 그에 따라 상승 프레임(41)의 파지 장치(420)를 저장 컨테이너(106) 상의 상보적인 상승 홀에 대해서 정렬시킬 수 있다.
상승 장치 모터(416")에 전력을 공급하기 위한 임의의 필수 전원(미도시)이 하부 섹션(413) 내에 배열될 수 있고, 그에 따라 무거운 저장 컨테이너(106)를 상승시키는 경우에 및/또는 컨테이너 핸들링 운반체(401)의 너무 큰 가속/감속의 결과로서 컨테이너 핸들링 운반체가 틸팅될 위험이 감소된 바람직한 중력 중심을 획득할 수 있다.
도 4c는 도 4b의 상면도이고, 하부 섹션(411), 지지 섹션(412) 및 외팔보 섹션(413)을 도시한다.
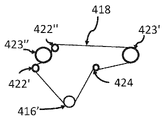
도 4d 내지 도 4i는 상승 샤프트들(417', 417")의 반대 회전을 제공하는 상이한 셋업들의 예이다. 도 4d 내지 도 4i의 모든 예에서 개시된 바와 같이, 모든 힘 전달 셋업에서 공통되는 것은, 회전 가능 상승 장치 모터(416'), 각각의 상승 샤프트(417', 417")와 함께 회전하도록 각각 연결되는 제1 및 제2 상승 샤프트 휠(423', 423"), 적어도 하나의 도르래(422', 422"), 폐쇄 루프를 형성하고 적어도 하나의 도르래(422', 422")가 폐쇄 루프 내에 배열되는 무한 벨트 형태의 힘 전달 요소(418)가 존재한다는 것이다. 또한, 제1 또는 제2 상승 샤프트 휠(423', 423")은 무한 벨트(418)의 내부 표면과 접촉되고, 제1 또는 제2 상승 샤프트 휠(423', 423") 중 다른 하나는 무한 벨트(418)의 외부 표면과 접촉된다. 이는, 제1 또는 제2 상승 샤프트 휠(423', 423")의 하나를 힘 전달 요소(418)에 의해서 형성된 폐쇄 루프 내에 배열하고 제1 또는 제2 상승 샤프트 휠(423', 423")의 다른 하나를 힘 전달 요소(418)에 의해서 형성된 폐쇄 루프의 외측에 배열하는 것에 의해서 달성된다. (각각 제1 및 제2 상승 샤프트 휠(423', 423")을 통해서) 제1 및 제2 상승 샤프트(417', 417")가 반대 방향들로 회전하도록(역회전 하도록), (예를 들어, 무한 벨트의 대향 측면들에 작용하는) 제1 및 제2 상승 샤프트 휠(423', 423"), 안내 도르래(422', 422"), 및 힘 전달 요소(418)의 상호 셋업이 구성된다. 상승 중에 수평 안정성을 보장하기 위해서, 제1 및 제2 상승 샤프트 휠(423', 423")은 바람직하게 동일한 수평 평면 내에 배열된다. 도르래(들)(422', 422")는, 이들이 힘 전달 요소(418)의 이동 방향의 "변화"를 제공하도록, 고정 위치에서 힘 전달 요소(418)의 이동에 따라 배열된다. 도르래(422', 422")의 각각은 힘 전달 요소(418)를 제1 및 제2 상승 샤프트 휠(423', 423") 상으로 정확하게 유도하도록 배열되고, 그에 의해서 제1 및 제2 상승 샤프트 휠(423', 423")(그리고 그에 따라 상승 샤프트(417', 417"))가 반대 방향들로 회전될 수 있게 한다.
도 4d의 예에서, 하나의 도르래(422')가 도시되어 있다.
도 4e 내지 도 4i의 예에서, 2개의 도르래(422', 422")를 포함하는 힘 전달 셋업의 많은 수의 예가 도시되어 있다. 힘 전달 요소(418)의 2개의 이동 방향 모두로 도르래(422', 422")가 제1 상승 샤프트 휠(423')을 따르도록 그리고 도르래(422', 422")가 제2 상승 샤프트 휠(423")을 따르도록, 도르래(422', 422")가 힘 전달 요소(418)의 경로를 따라서 교번적으로 배열된다.
도 4g, 도 4h, 도 4i의 예에서, 힘 전달 요소(418)의 장력화(tensioning)를 위한 당김 휠(424)을 포함하는 예가 개시되어 있다. 당김 휠(424)은 예를 들어, 고정 브라켓 내의 개구부 내에서 조정될 수 있는 굴대를 갖는 회전 가능 도르래를 포함하는 편심 장력화 메커니즘일 수 있다. 힘 전달 요소(418)의 경로를 따른 당김 휠(424)의 위치는 바람직하게, 힘 전달 요소(418)의 경로 길이가 영향을 받을 수 있는(즉, 힘 전달 요소 내의 장력을 증가 또는 감소시키기 위해서 힘 전달 요소의 경로가 단축되거나 연장될 수 있는) 위치이다. 당김 휠(424)은 힘 전달 요소(418)에 의해서 형성된 폐쇄 루프의 내측(도 4g 및 도 4i) 또는 외측(도 4h)에 배열될 수 있다.
도 4d 내지 도 4f의 예에서, 당김 휠과 같은 전용 장력화 메커니즘이 도시되어 있지 않으나; 장력화 메커니즘이 필요한 경우에, 도르래(422' 또는 422")의 하나가 장력화 메커니즘일 수 있고 당김 휠(424)에 의해서 대체될 수 있다.
도 5는 상승 장치(414)의 다른 셋업의 예이고, 상승 샤프트(417) 및 상승 샤프트(417', 417") 상으로 감길 수 있고 그로부터 풀릴 수 있는 상승 밴드에 더하여, 상승 장치 모터(416")가 또한 본체 유닛(410)의 외팔보 섹션(413) 내에 배열된다. 도 5의 상승 장치 모터(416")는 상승 샤프트(417', 417") 중 하나를 둘러싸는 무브러시 DC 모터이다. 상승 샤프트(417', 417")의 동기화된 동작은, 기재 내용이 본원에서 참조로 포함되는 WO 2019/137870 A1(출원인: Autostore Technology AS)의 도 5a 내지 도 5e 및 도 6a 내지 도 6h에서 개시된 바와 같은 힘 전달 요소와 같은 동기화 요소에 의해서 얻어질 수 있다.
도 6a 내지 도 6c는 서로를 지나는 2개의 컨테이너 핸들링 운반체(401)의 제1 실시형태의 상이한 도면들을 도시하고, 여기에서 컨테이너 핸들링 운반체(401) 중 하나는, 동일 배향으로 다른 컨테이너 핸들링 운반체(401)를 지날 때, 저장 컨테이너(106)를 이송할 수 있다. 따라서, 2개의 컨테이너 핸들링 운반체(401)는, 서로를 지날 때, 종래 기술의 외팔보 컨테이너 핸들링 운반체보다 적은 그리드 셀(122)을 점유할 수 있는데, 이는, 하나의 외팔보 섹션(413)이 (간극을 가지고) 다른 것의 하부 섹션(411) 및 휠 기부 유닛(2) 위를 지날 수 있기 때문이다. 통과 중에, 하나의 컨테이너 핸들링 운반체의 외팔보 섹션(413)은 다른 컨테이너 핸들링 운반체(401)의 하부 섹션(411) 및 휠 기부 유닛(2)과 수직으로 중첩될 것이다.
도 6a 내지 도 6c에서 확인될 수 있는 바와 같이, 하부 섹션(411)의 상부 표면의 제1 높이(h1)와 상승 프레임(415)의 최하부 부분의 제2 높이(h2)의 차이는 저장 컨테이너(106)의 높이보다 낮고, 이는 "전방" 컨테이너 핸들링 운반체(즉, 도면에서 좌측의 컨테이너 핸들링 운반체) 만이 통과 중에 저장 컨테이너를 이송할 수 있는 결과를 초래한다. 그러나, 이러한 배열에서, 통과 중에 컨테이너 핸들링 운반체는, 종래 기술의 외팔보 운반체에 비해서 더 적은 그리드 셀(122), 즉 4개가 아닌 3개의 그리드 셀(122)을 점유한다. 간극(c)이 도 6c의 좌측의 컨테이너 핸들링 운반체(401)의 하부 섹션(411)과 도 6c의 우측의 컨테이너 핸들링 운반체(401)의 상승 프레임(415)의 최하부 부분 사이에 도시되어 있다.
컨테이너 핸들링 운반체(401)는, 컨테이너 핸들링 운반체(401)가 위에서 동작하는 레일 시스템(108)을 포함하는 자동화된 저장 및 회수 시스템(1)의 일부를 형성한다.
도 6c에서 확인될 수 있는 바와 같이, 본체 유닛(410)의 하부 섹션(413)의 풋프린트가 실질적으로 휠(32a, 32b)의 폭 만큼 또는 휠의 폭과 동일한 만큼 상기 휠 기부 유닛(2)의 풋프린트에 대해서 변위될 수 있다. 휠 기부 유닛(2)이 제1 트랙(또는 그리드 개구부에 가장 근접한 트랙) 위에 배치된 휠(32a)을 가질 때, 하부 섹션(411)은 외팔보 섹션(413) 아래의 제2 트랙의 외부 연부로부터 그리고 대향 측면 상의 제1 트랙의 내부 연부로부터 수직으로 연장되도록 배치된다. 도 6a 내지 도 6c에 도시된 바와 같이 동일 배향을 가지는, 2개의 컨테이너 핸들링 운반체들(401)이 서로를 지날 때, 이들은 총 3개의 그리드 셀(122)을 점유한다.
도 7a 내지 도 7c는 서로를 지나는 2개의 컨테이너 핸들링 운반체(401)의 제2 실시형태의 상이한 도면들을 도시하고, 여기에서 2개의 컨테이너 핸들링 운반체(401) 모두는 통과 중에 저장 컨테이너를 이송할 수 있다. 컨테이너 핸들링 운반체(401)는, 컨테이너 핸들링 운반체(401)가 위에서 동작하는 레일 시스템(108)을 포함하는 자동화된 저장 및 회수 시스템(1)의 일부를 형성한다.
도 7d는, 저장 컨테이너를 이송하지 않을 때, 도 7a 내지 도 7c의 제2 실시형태에 따른 컨테이너 핸들링 운반체를 도시한다. 도 7a 내지 도 7d에 도시된 바와 같이, 제2 높이(h2)와 제1 높이(h1) 사이의 차이는 적어도, 작은 간극(c)을 포함하는 저장 컨테이너(106)의 높이에 상응한다(도 7c 참조).
도 8은 제2 외팔보 섹션(513')에 대향되어 배열된 제1 외팔보 섹션(513")을 포함하는 이중 컨테이너 핸들링 운반체(501)를 갖는 실시형태를 도시한다. 도 8의 컨테이너 핸들링 운반체(401)는 제2 실시형태에 따른 컨테이너 핸들링 운반체(즉, 2개의 컨테이너 핸들링 운반체들(401) 모두가 통과 중에 저장 컨테이너를 이송할 수 있는, 도 7a 내지 도 7c에 개시된 바와 같은 컨테이너 핸들링 운반체)이다. 이중 컨테이너 핸들링 운반체(501)는 도 4a 내지 도 4c, 도 5, 도 6a 내지 도 6c, 및 도 7a 내지 도 7c와 관련하여 전술한 바와 같은 2개의 상승 장치를 포함한다. 도 8에 도시된 바와 같이, 제1 컨테이너 핸들링 운반체(401)는 제1 배향을 가지고, 제2 컨테이너 핸들링 운반체(401)는 제1 컨테이너 핸들링 운반체(401)의 배향에 반대되는 제2 배향을 갖는다. 종래 기술의 구성에서, 이중 컨테이너 핸들링 운반체(501) 그리고 제1 및 제2 컨테이너 핸들링 운반체(401)는 서로를 지날 때 7개의 셀을 점유할 것이지만, 본원에서 규정된 바와 같은 컨테이너 핸들링 운반체(401, 501)는 이들이 서로를 지날 때 5개의 셀만을 점유할 수 있게 한다. 도 8의 이중 컨테이너 핸들링 운반체(501)는 2개의 저장 컨테이너(106)를 이송하고, 컨테이너 핸들링 운반체(401)의 각각은 통과할 때 하나의 저장 컨테이너(106)를 이송한다.
선행 설명에서, 본 발명에 따른 자동화된 저장 및 회수 시스템의 여러 양태가 예시적인 실시형태를 참조하여 설명되었다. 그러나, 이러한 설명은 제한적인 의미로 해석되는 것으로 의도되지 않는다. 당업자에게 명확한, 예시적인 실시형태의 여러 수정 및 변경뿐만 아니라, 시스템의 다른 실시형태가 이하의 청구범위에 의해서 규정되는 바와 같은 본 발명의 범위에 포함되는 것으로 간주된다.
1
종래 기술의 저장 및 회수 시스템
2 휠 기부 유닛
4, 4' 전기 모터
6 재충전 가능 배터리
7 휠 변위 조립체
8 휠 변위 조립체용 전기 모터
9 상단 패널/플랜지
10 관통-홀
20 중심 개구부
21 전자 제어 시스템
32a, 32b 휠 배열체, 제1 및 제2 세트의 휠
100 프레임워크 구조물
102 프레임워크 구조물의 직립 부재
103 프레임워크 구조물의 수평 부재
104 저장 그리드
105 저장 컬럼
106 저장 컨테이너
106' 저장 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 제1 세트의 평행 레일
110a, 110b 제1 세트의 레일의 트랙
111 제2 방향(Y)의 제2 세트의 평행 레일
111a, 111b 제2 세트의 레일의 트랙
112 접근 개구부/그리드 컬럼
115 그리드 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
122 그리드 셀
201 종래 기술의 저장 컨테이너 운반체
201a 저장 컨테이너 운반체(201)의 운반체 본체
201b 구동 수단/바퀴 배열체, 제1 방향(X)
201c 구동 수단/바퀴 배열체, 제2 방향(Y)
301 종래 기술의 외팔보 저장 컨테이너 운반체
301a 저장 컨테이너 운반체(301)의 운반체 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
304 컨테이너 핸들링 운반체(301)의 파지 장치의 부분
401 컨테이너 핸들링 운반체
410 본체 유닛
411 본체 유닛의 하부 섹션
412 본체 유닛의 지지 섹션
413 본체 유닛의 외팔보 섹션
414 상승 장치
415 상승 프레임
416', 416" 상승 장치 모터
417', 417" 상승 샤프트
418 힘 전달 요소
419 상승 밴드
420 파지 장치
421 안내부
422', 422" 도르래
423', 423" 상승 샤프트 휠
424 당김 휠
500 제어 시스템
501 2개의 외팔보 섹션을 갖는 이중 컨테이너 핸들링 운반체
X 제1 방향
Y 제2 방향
Z 제3 방향
C 간극
h1 제1 높이
h2 제2 높이
2 휠 기부 유닛
4, 4' 전기 모터
6 재충전 가능 배터리
7 휠 변위 조립체
8 휠 변위 조립체용 전기 모터
9 상단 패널/플랜지
10 관통-홀
20 중심 개구부
21 전자 제어 시스템
32a, 32b 휠 배열체, 제1 및 제2 세트의 휠
100 프레임워크 구조물
102 프레임워크 구조물의 직립 부재
103 프레임워크 구조물의 수평 부재
104 저장 그리드
105 저장 컬럼
106 저장 컨테이너
106' 저장 컨테이너의 특정 위치
107 적층체
108 레일 시스템
110 제1 방향(X)의 제1 세트의 평행 레일
110a, 110b 제1 세트의 레일의 트랙
111 제2 방향(Y)의 제2 세트의 평행 레일
111a, 111b 제2 세트의 레일의 트랙
112 접근 개구부/그리드 컬럼
115 그리드 개구부
119 제1 포트 컬럼
120 제2 포트 컬럼
122 그리드 셀
201 종래 기술의 저장 컨테이너 운반체
201a 저장 컨테이너 운반체(201)의 운반체 본체
201b 구동 수단/바퀴 배열체, 제1 방향(X)
201c 구동 수단/바퀴 배열체, 제2 방향(Y)
301 종래 기술의 외팔보 저장 컨테이너 운반체
301a 저장 컨테이너 운반체(301)의 운반체 본체
301b 제1 방향(X)의 구동 수단
301c 제2 방향(Y)의 구동 수단
304 컨테이너 핸들링 운반체(301)의 파지 장치의 부분
401 컨테이너 핸들링 운반체
410 본체 유닛
411 본체 유닛의 하부 섹션
412 본체 유닛의 지지 섹션
413 본체 유닛의 외팔보 섹션
414 상승 장치
415 상승 프레임
416', 416" 상승 장치 모터
417', 417" 상승 샤프트
418 힘 전달 요소
419 상승 밴드
420 파지 장치
421 안내부
422', 422" 도르래
423', 423" 상승 샤프트 휠
424 당김 휠
500 제어 시스템
501 2개의 외팔보 섹션을 갖는 이중 컨테이너 핸들링 운반체
X 제1 방향
Y 제2 방향
Z 제3 방향
C 간극
h1 제1 높이
h2 제2 높이
Claims (17)
- 2-차원적인 레일 시스템(108) 상에서의 동작을 위한 컨테이너 핸들링 운반체(401)이며, 2-차원적인 레일 시스템은 프레임 구조물(100)의 상단부를 가로질러 제1 방향(X)으로 컨테이너 핸들링 운반체(401)의 이동을 안내하도록 배열된 제1 세트의 평행 레일(110), 및 제1 방향에 수직인 제2 방향(Y)으로 컨테이너 핸들링 운반체(401)의 이동을 안내하기 위한, 제1 세트의 레일(110)에 수직으로 배열된, 제2 세트의 평행 레일(111)을 포함하고, 제1 및 제2 세트의 평행 레일(110, 111)은 레일 시스템(108)을 복수의 그리드 셀(122)로 분할하고, 컨테이너 핸들링 운반체(401)는:
- 컨테이너 핸들링 운반체(401)를 제1 및 제2 방향(X, Y)으로 레일 시스템(108)을 따라 안내하기 위한 세트의 휠(32a, 32b)을 포함하는 휠 기부 유닛(2);
- 본체 유닛(410)으로서:
휠 기부 유닛(2) 상에 제공되는 하부 섹션(411)으로서, 그리드 셀(122) 중 하나의 수평 범위 이하인 수평 범위를 갖는 풋프린트 및 제1 높이(h1)에 위치되는 상단 표면을 가지는, 하부 섹션(411);
하부 섹션(411)으로부터 수직으로 연장되는 지지 섹션(412)으로서, 하부 섹션(411)의 풋프린트보다 작은 수평 범위의 풋프린트를 갖는, 지지 섹션(412); 및
지지 섹션(412)으로부터 하부 섹션(411)의 풋프린트를 넘어서 수평으로 연장되는 외팔보 섹션(413)을 포함하는, 본체 유닛(410);
- 본체 유닛(410)의 외팔보 섹션(413)으로부터 매달린 상승 프레임(415)을 포함하는 상승 장치(414)로서, 상승 프레임(415)은 상승 프레임(415)이 외팔보 섹션(413)에 인접하여 상부 위치에 도킹될 때 제2 높이(h2)에서 최하부 부분을 가지는, 상승 장치(414)를 포함하고,
상승 프레임(415)의 최하부 부분의 제2 높이(h2)는, 상승 프레임(415)이 그 상부 위치에서 도킹될 때, 본체 유닛(410)의 하부 섹션(411)의 상단 표면의 제1 높이(h1) 위에 있는, 컨테이너 핸들링 운반체(401). - 제1항에 있어서,
지지 섹션(412)은 저장 컨테이너(106)보다 높은 높이로 연장되고, 제2 높이(h2)와 제1 높이(h1) 사이의 차이는 적어도 저장 컨테이너(106)의 높이에 상응하는, 컨테이너 핸들링 운반체(401). - 제1항 또는 제2항에 있어서,
상승 장치(414)는 상승 장치 모터(416') 및 적어도 2개의 상승 샤프트(417)를 포함하고, 적어도 2개의 상승 샤프트(417)는 외팔보 섹션(413) 내에 배열되고, 상승 장치 모터(416')는 하부 섹션(411) 내에 배열되고, 상승 장치 모터(416') 및 적어도 2개의 상승 샤프트(417)가 가요성 힘 전달 요소(418)을 통해서 서로 연결되는, 컨테이너 핸들링 운반체(401). - 제1항 또는 제2항에 있어서,
상승 장치(414)는 상승 장치(414)를 상승 및 하강시키기 위한 상승 장치 모터(416") 및 적어도 2개의 상승 샤프트(417)를 포함하고, 상승 장치 모터(416") 및 적어도 2개의 상승 샤프트(417)는 외팔보 섹션(413) 내에 배열되는, 컨테이너 핸들링 운반체(401). - 제1항 내지 제4항 중 어느 한 항에 있어서,
본체 유닛(410)은, 하부 섹션(411), 지지 섹션(412), 및 외팔보 섹션(413)을 함께 연결하는 S-형상의 하우징을 포함하는, 컨테이너 핸들링 운반체(401). - 제1항 내지 제5항 중 어느 한 항에 있어서,
본체 유닛(410)의 하부 섹션(413)의 풋프린트가 실질적으로 휠(32a, 32b)의 폭 만큼 또는 휠의 폭과 동일한 만큼 휠 기부 유닛(2)의 풋프린트에 대해서 변위되는, 컨테이너 핸들링 운반체(401). - 제1항 내지 제6항 중 어느 한 항에 있어서,
상승 프레임(415)은 상승 밴드(419) 상에 매달리고, 상승 프레임(415)은 수평으로 연장되고 파지 장치(420) 및 모서리 안내부(420)를 포함하고, 모서리 안내부(420)의 최하부 지점은 상승 프레임(415)의 최하부 부분을 제공하는, 컨테이너 핸들링 운반체(401). - 2-차원적인 레일 시스템(108)을 포함하는 자동화된 저장 및 회수 시스템이며, 2-차원적인 레일 시스템은 프레임 구조물(100)의 상단부를 가로질러 제1 방향(X)으로 컨테이너 핸들링 운반체(401)의 이동을 안내하도록 배열된 제1 세트의 평행 레일(110), 및 제1 방향에 수직인 제2 방향(Y)으로 컨테이너 핸들링 운반체(401)의 이동을 안내하기 위한, 제1 세트의 레일(110)에 수직으로 배열된, 제2 세트의 평행 레일(111)을 포함하고, 제1 및 제2 세트의 평행 레일(110, 111)은 레일 시스템(108)을 복수의 그리드 셀(122)로 분할하고, 자동화된 저장 및 회수 시스템은 제1항 내지 제7항 중 어느 한 항에 따른 복수의 컨테이너 핸들링 운반체(401)를 포함하는, 자동화된 저장 및 회수 시스템.
- 제8항에 있어서,
동일한 배향을 가지는 2개의 컨테이너 핸들링 운반체(401)는, 서로를 지날 때, 3개의 그리드 셀(122)을 점유하는, 자동화된 저장 및 회수 시스템. - 제9항에 있어서,
제1 및 제2 컨테이너 운반체가 인접 그리드 셀들(122) 상에서 서로를 지날 때, 제1 컨테이너 핸들링 운반체의 도킹된 상승 프레임의 최하부 부분이 제2 컨테이너 핸들링 운반체의 본체 유닛의 하부 섹션의 상단 표면 위를 통과할 수 있도록, 2개의 컨테이너 핸들링 운반체(401)가 구성되는, 자동화된 저장 및 회수 시스템. - 제8항 내지 제10항 중 어느 한 항에 있어서,
제1 세트의 레일(110) 및/또는 제2 세트의 레일(111)은 단일 트랙, 또는 2개의 트랙을 포함하는 이중 트랙을 포함하고,
그리드 셀(122)이, 단일 그리드 개구부(115)를 둘러싸고 그에 가장 근접하여 배열되는 제1 및 제2 방향(X, Y)으로 제1 및 제2 세트의 레일의 단일 트랙에 의해서 점유되는 지역과 함께 제1 세트의 레일(110) 및 제2 세트의 레일(111)에 의해서 경계 지어진 그리드 개구부(115)에 의해서 점유되는 수평 지역으로 정의되는, 자동화된 저장 및 회수 시스템. - 제8항 내지 제11항 중 어느 한 항에 있어서,
휠 기부 유닛(2)은 그리드 셀(122)의 제1 및 제2 방향(X, Y)을 따라 수평 범위와 동일한 풋프린트를 가지는, 컨테이너 핸들링 운반체(401). - 제8항 내지 제12항 중 어느 한 항에 있어서,
컨테이너 핸들링 운반체(401) 중 적어도 하나는, 다른 컨테이너 핸들링 운반체(401)를 지날 때, 저장 컨테이너(106)를 이송할 수 있는, 자동화된 저장 및 회수 시스템. - 제13항에 있어서,
저장 컨테이너(106)가 이송될 때 그 최하부 지점은 하부 섹션(411)의 제1 높이(h1)보다 높은, 자동화된 저장 및 회수 시스템. - 제8항 내지 제14항 중 어느 한 항에 있어서,
일 방향을 따른 지지 섹션(412)의 폭은 레일 및/또는 2개의 트랙(110, 111)의 폭에 상응하는, 자동화된 저장 및 회수 시스템. - 제8항 내지 제15항 중 어느 한 항에 있어서,
제2 외팔보 섹션(513')에 대향되어 배열된 제1 외팔보 섹션(513")을 포함하는 적어도 하나의 이중 컨테이너 핸들링 운반체(501)를 더 포함하는, 자동화된 저장 및 회수 시스템. - 제16항에 있어서,
적어도 제1 컨테이너 핸들링 운반체(401)가 제1 배향을 가지고, 적어도 제2 컨테이너 핸들링 운반체(401)가 제1 배향에 반대되는 제2 배향을 가지고, 이중 컨테이너 핸들링 운반체(501) 그리고 제1 및 제2 컨테이너 핸들링 운반체(401)는, 동시에 서로를 지날 때, 5개의 그리드 셀을 점유하는, 자동화된 저장 및 회수 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NO20200467 | 2020-04-16 | ||
| NO20200467A NO20200467A1 (en) | 2020-04-16 | 2020-04-16 | Container handling vehicle with cantilever construction and automated storage and retrieval system comprising a plurality of the container handling vehicles |
| PCT/EP2021/059312 WO2021209338A2 (en) | 2020-04-16 | 2021-04-09 | Container handling vehicle with cantilever construction and automated storage and retrieval system comprising a plurality of the container handling vehicles |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20230003515A true KR20230003515A (ko) | 2023-01-06 |
Family
ID=75539303
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020227039530A KR20230003515A (ko) | 2020-04-16 | 2021-04-09 | 외팔보 구성을 갖는 컨테이너 핸들링 운반체, 및 복수의 컨테이너 핸들링 운반체를 포함하는 자동화된 저장 및 회수 시스템 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US20230144676A1 (ko) |
| EP (1) | EP4136042A2 (ko) |
| JP (1) | JP2023523552A (ko) |
| KR (1) | KR20230003515A (ko) |
| CN (1) | CN115397752A (ko) |
| CA (1) | CA3173781A1 (ko) |
| NO (1) | NO20200467A1 (ko) |
| WO (1) | WO2021209338A2 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114604550A (zh) | 2018-04-25 | 2022-06-10 | 自动存储科技股份有限公司 | 集装箱搬运车辆以及自动储存和取回系统 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NO334806B1 (no) | 2012-11-13 | 2014-06-02 | Jakob Hatteland Logistics As | Lagringssystem |
| NO335839B1 (no) | 2012-12-10 | 2015-03-02 | Jakob Hatteland Logistics As | Robot for transport av lagringsbeholdere |
| NO337544B1 (no) | 2014-06-19 | 2016-05-02 | Jakob Hatteland Logistics As | Fjernstyrt kjøretøysammenstilling for å plukke opp lagringsbeholdere fra et lagringssystem |
| NO20170216A1 (en) | 2017-02-13 | 2018-08-14 | Autostore Tech As | Rail arrangement for wheeled vehicles in a storage system |
| NO345129B1 (en) * | 2017-11-23 | 2020-10-12 | Autostore Tech As | Automated storage and retrieval system and a method of operating the same. |
| NO347820B1 (en) * | 2018-01-09 | 2024-04-08 | Autostore Tech As | Automated storage and retrieval system, a container handling vehicle which can operate on an automated storage and retrieval system and a method of operating an automated storage and retrieval system |
| NO20181419A1 (en) * | 2018-11-06 | 2020-05-07 | Autostore Tech As | Container handling vehicle with an open top, and method of handling product items into storage container carried by the vehicle |
| US11724880B2 (en) * | 2019-07-29 | 2023-08-15 | Nimble Robotics, Inc. | Storage systems and methods for robotic picking |
-
2020
- 2020-04-16 NO NO20200467A patent/NO20200467A1/en unknown
-
2021
- 2021-04-09 EP EP21719076.8A patent/EP4136042A2/en active Pending
- 2021-04-09 KR KR1020227039530A patent/KR20230003515A/ko unknown
- 2021-04-09 WO PCT/EP2021/059312 patent/WO2021209338A2/en unknown
- 2021-04-09 CN CN202180028809.3A patent/CN115397752A/zh active Pending
- 2021-04-09 US US17/918,215 patent/US20230144676A1/en active Pending
- 2021-04-09 CA CA3173781A patent/CA3173781A1/en active Pending
- 2021-04-09 JP JP2022562478A patent/JP2023523552A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN115397752A (zh) | 2022-11-25 |
| WO2021209338A2 (en) | 2021-10-21 |
| JP2023523552A (ja) | 2023-06-06 |
| CA3173781A1 (en) | 2021-10-21 |
| EP4136042A2 (en) | 2023-02-22 |
| WO2021209338A3 (en) | 2021-11-25 |
| NO20200467A1 (en) | 2021-10-18 |
| US20230144676A1 (en) | 2023-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11834268B2 (en) | Storage system with modular container handling vehicles | |
| US20230183002A1 (en) | Container handling vehicle which can load and/or unload itself | |
| CN112272643B (zh) | 具有升降装置的容器存取站 | |
| WO2019238703A1 (en) | Storage system with modular container handling vehicles | |
| NO20201315A1 (en) | Container handling vehicle which can load and/or unload itself | |
| CN112262088B (zh) | 输送车辆、自动储存和取回系统及在自动储存和取回网格与第二位置之间运输储存容器的方法 | |
| KR20230002392A (ko) | 컨테이너 이송 위치를 포함하는 컨테이너 핸들링 운반체, 연관 시스템 및 방법 | |
| US20220388773A1 (en) | Rescue system and methods for retrieving a malfunctioning vehicle from a rail system | |
| JP7561812B2 (ja) | 第1および第2の区分と共に第2の区分におけるモータを伴うコンテナ取扱車両 | |
| US20240002151A1 (en) | A storage container handling system and a method of transferring a storage container | |
| KR20230003515A (ko) | 외팔보 구성을 갖는 컨테이너 핸들링 운반체, 및 복수의 컨테이너 핸들링 운반체를 포함하는 자동화된 저장 및 회수 시스템 | |
| CN116490448A (zh) | 稳定性增加的容器搬运车辆 | |
| NO20200672A1 (en) | Container handling vehicle comprising a container carrying position, associated system and methods | |
| CN117957178A (zh) | 容器缓冲组件、包括该容器缓冲组件的储存系统及相关方法 | |
| WO2024002885A1 (en) | Container handling vehicle with motor at lower elevation than first and second lifting shafts, a system comprising the container handling vehicle, and method of driving the first and second lifting shafts | |
| WO2024200791A1 (en) | Storage system |