KR20200081202A - 병렬 메커니즘 - Google Patents
병렬 메커니즘 Download PDFInfo
- Publication number
- KR20200081202A KR20200081202A KR1020190106473A KR20190106473A KR20200081202A KR 20200081202 A KR20200081202 A KR 20200081202A KR 1020190106473 A KR1020190106473 A KR 1020190106473A KR 20190106473 A KR20190106473 A KR 20190106473A KR 20200081202 A KR20200081202 A KR 20200081202A
- Authority
- KR
- South Korea
- Prior art keywords
- gear
- reverse rotation
- accessory chain
- joint module
- base plate
- Prior art date
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0283—Three-dimensional joints
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Transmission Devices (AREA)
Abstract
본 발명의 일 실시 예에 따른 병렬 메커니즘은 제1 방향으로의 회전 운동을 제공하는 베이스 플레이트; 상기 베이스 플레이트로부터의 상기 제1 방향으로의 회전 운동을 전달하는 제1 부속 체인; 상기 베이스 플레이트와 이격하여 배치되되, 상기 제1 부속 체인으로부터 상기 제1 방향으로의 회전 운동을 제2 방향으로의 회전 운동으로 전환하는 역회전 관절 모듈이 장착된 공유 플레이트; 상기 역회전 관절 모듈으로부터 상기 제2 방향으로의 회전 운동을 전달하는 제2 부속 체인; 및 상기 공유 플레이트와 이격하여 배치되고, 상기 제2 부속 체인에 의하여 상기 제1 방향으로 회전하되, 상기 베이스 플레이트에서 제공된 회전 운동이 증폭되어 회전되는, 무빙 플레이트를 포함하여 이루어질 수 있다.
Description
본 발명은 병렬 메커니즘에 관련된 것으로 보다 구체적으로는 역회전 관절을 이용한 공간형 펜토그래프 구조의 병렬 메커니즘에 관련된 것이다.
메커니즘 예를 들어, 손목 메커니즘은 로봇의 끝 단에 부착되어 로봇 손의 방위각을 제어하는 목적으로 활용되며 햅틱기기나 방위각 제어가 요구되는 다양한 산업분야에도 활용되고 있다.
기존 손목 메커니즘 구조는 직렬형, 병렬형, 혼합형 등 다양한 구조가 있으며 특히 병렬 구조의 경우는 작업공간이나 기구학 특성은 직렬 구조에 비하여 그 우수성이 떨어지지만 정밀도, 강성, 그리고 관성의 측면에서는 우수한 특성을 가지고 있다.
즉, 병렬 구조 메커니즘은 직렬 구조 메커니즘에 비하여 강성 및 정밀도 측면에서 우수한 특성이 있으며 무거운 구동 엑츄에이터를 지면 쪽으로 배치할 수 있으므로 관성 측면에서도 우수한 것으로 알려져 있다.
병렬 구조 손목 메커니즘의 경우 넓은 작업공간과 우수한 기구학 특성이 요구되지만 대부분의 기존 병렬 구조 손목 메커니즘의 경우 작업공간이 충분하지 않거나 부피가 커서 손목구조에 적합하지 않으므로 그 성능의 개선이 요구된다.
본 발명이 해결하고자 하는 일 기술적 과제는, 넓은 작업공간을 가지는 병렬 메커니즘을 제공하는 데 있다.
본 발명이 해결하고자 하는 다른 기술적 과제는 향상된 기구학 특성을 가지는 병렬 메커니즘을 제공하는 데 있다.
본 발명이 해결하고자 하는 또 다른 기술적 과제는 회전형 1 자유도, 회전형 2 자유도, 회전형 3 자유도 및 그 이상의 병렬 메커니즘을 제공하는 데 있다.
본 발명이 해결하고자 하는 기술적 과제는 상술된 것에 제한되지 않는다.
본 발명의 일 실시 예에 따른 병렬 메커니즘은 제1 방향으로의 회전 운동을 제공하는 베이스 플레이트; 상기 베이스 플레이트로부터의 상기 제1 방향으로의 회전 운동을 전달하는 제1 부속 체인; 상기 베이스 플레이트와 이격하여 배치되되, 상기 제1 부속 체인으로부터 상기 제1 방향으로의 회전 운동을 제2 방향으로의 회전 운동으로 전환하는 역회전 관절 모듈이 장착된 공유 플레이트; 상기 역회전 관절 모듈으로부터 상기 제2 방향으로의 회전 운동을 전달하는 제2 부속 체인; 및 상기 공유 플레이트와 이격하여 배치되고, 상기 제2 부속 체인에 의하여 상기 제1 방향으로 회전하되, 상기 베이스 플레이트에서 제공된 회전 운동이 증폭되어 회전되는, 무빙 플레이트를 포함할 수 있다.
일 실시 예에 따르면, 상기 공유 플레이트는 내부에 작업 공간이 형성될 수 있다.
일 실시 예에 따르면, 상기 무빙 플레이트는 상기 공유 플레이트를 중심으로 상기 베이스 플레이트와 대칭하는 형태를 가질 수 있다.
일 실시 예에 따르면, 상기 역회전 관절 모듈의 일 측에는 상기 제1 부속 체인이 결합되며, 상기 역회전 관절 모듈의 타 측에는 상기 제2 부속 체인이 결합될 수 있다.
일 실시 예에 따르면, 상기 역회전 관절 모듈은, 제1 축 상에 마련되며, 상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 기어, 제2 축 상에 마련되며, 상기 제1 기어에 맞물려 제2 방향으로 회전하는 제2 기어, 상기 제2 축 상에 마련되며, 상기 제2 기어와 동일한 방향으로 회전하는 제3 기어, 상기 제3 기어에 맞물려 제1 방향으로 회전하는 제4 기어 및 상기 제1 축 상에 마련되되, 상기 제4 기어에 연동하여 제2 방향으로 회전하는 제5 기어를 포함하며, 상기 제5 기어는 상기 제2 부속 체인의 일 단과 연결될 수 있다.
일 실시 예에 따르면, 상기 역회전 관절 모듈은, 제1 축 상에 마련되며, 상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 기어, 제2 축 상에 마련되며, 상기 제1 기어에 맞물려 제2 방향으로 회전하는 제2 기어, 상기 제2 축 상에 마련되며, 상기 제2 기어와 동일한 제2 방향으로 회전하는 제1 회전부, 상기 제1 축 상에 마련되며, 상기 제1 회전부와 연동 부재에 의하여 연동하여 제2 방향으로 회전하는 제2 회전부를 포함하되, 상기 제2 회전부는 상기 제2 부속 체인의 일 단과 연결될 수 있다.
일 실시 예에 따르면, 상기 역회전 관절 모듈은, 상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 베벨 기어, 상기 제1 베벨 기어에 맞물려 회전하는 역회전 기어, 상기 역회전 기어에 맞물려 회전하는 제2 베벨 기어를 포함하며, 상기 제2 베벨 기어는 상기 제2 부속 체인의 일 단과 연결될 수 있다.
일 실시 예에 따르면, 상기 제1 부속 체인의 일 단은 상기 베이스 플레이트의 일 측에 연결되고, 상기 제1 부속 체인의 타 단은 상기 역회전 관절 모듈에 연결되며, 상기 제2 부속 체인의 일 단은 상기 역회전 관절 모듈에 연결되고, 상기 제2 부속 체인의 타 단은 상기 무빙 플레이트에 연결될 수 있다.
일 실시 예에 따르면, 상기 베이스 플레이트의 일 측에는 회전 운동을 생성하는 적어도 하나의 구동 관절이 마련될 수 있다.
본 발명의 일 실시 예에 따른 병렬 메커니즘은 제1 방향으로의 회전 운동을 제공하는 베이스 플레이트; 상기 베이스 플레이트로부터의 상기 제1 방향으로의 회전 운동을 전달하는 제1 부속 체인; 상기 베이스 플레이트와 이격하여 배치되되, 상기 제1 부속 체인으로부터 상기 제1 방향으로의 회전 운동을 제2 방향으로의 회전 운동으로 전환하는 역회전 관절 모듈이 장착된 공유 플레이트; 상기 역회전 관절 모듈으로부터 상기 제2 방향으로의 회전 운동을 전달하는 제2 부속 체인; 및 상기 공유 플레이트와 이격하여 배치되고, 상기 제2 부속 체인에 의하여 상기 제1 방향으로 회전하되, 상기 베이스 플레이트에서 제공된 회전 운동이 증폭되어 회전되는, 무빙 플레이트를 포함할 수 있다.
일 실시 예에 따르면, 역회전 관절 모듈을 활용하여 두 개의 병렬 구조 메커니즘 모듈의 운동이 연동되므로, 무빙 플레이트의 회전량이 증폭될 수 있다.
또한, 각 플레이트의 내부 중공이 서로 연통하는 형태를 이루므로, 작업공간이 정의될 수 있으며, 무빙 플레이트의 회전에도 불구하고 넓은 작업공간이 제공될 수 있다.
도 1 및 도 2는 본 발명의 일 실시 예에 따른 병렬 메커니즘을 설명하기 위한 도면이다.
도 3은 본 발명의 일 실시 예에 따른 병렬 메커니즘의 동작 원리를 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 5 및 도 6은 본 발명의 일 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 7은 본 발명의 다른 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 8 및 9는 본 발명의 일 실시 에에 따른 병렬 메커니즘의 구동 예를 설명하기 위한 도면이다.
도 10은 본 발명의 다른 실시 에에 따른 병렬 메커니즘을 설명하기 위한 도면이다.
도 3은 본 발명의 일 실시 예에 따른 병렬 메커니즘의 동작 원리를 설명하기 위한 도면이다.
도 4는 본 발명의 일 실시 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 5 및 도 6은 본 발명의 일 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 7은 본 발명의 다른 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 8 및 9는 본 발명의 일 실시 에에 따른 병렬 메커니즘의 구동 예를 설명하기 위한 도면이다.
도 10은 본 발명의 다른 실시 에에 따른 병렬 메커니즘을 설명하기 위한 도면이다.
이하, 첨부된 도면들을 참조하여 본 발명의 바람직한 실시 예를 상세히 설명할 것이다. 그러나 본 발명의 기술적 사상은 여기서 설명되는 실시 예에 한정되지 않고 다른 형태로 구체화 될 수도 있다. 오히려, 여기서 소개되는 실시 예는 개시된 내용이 철저하고 완전해질 수 있도록 그리고 당업자에게 본 발명의 사상이 충분히 전달될 수 있도록 하기 위해 제공되는 것이다.
본 명세서에서, 어떤 구성요소가 다른 구성요소 상에 있다고 언급되는 경우에 그것은 다른 구성요소 상에 직접 형성될 수 있거나 또는 그들 사이에 제 3의 구성요소가 개재될 수도 있다는 것을 의미한다. 또한, 도면들에 있어서, 형상 및 크기는 기술적 내용의 효과적인 설명을 위해 과장된 것이다.
또한, 본 명세서의 다양한 실시 예 들에서 제1, 제2, 제3 등의 용어가 다양한 구성요소들을 기술하기 위해서 사용되었지만, 이들 구성요소들이 이 같은 용어들에 의해서 한정되어서는 안 된다. 이들 용어들은 단지 어느 구성요소를 다른 구성요소와 구별시키기 위해서 사용되었을 뿐이다. 따라서, 어느 한 실시 예에 제 1 구성요소로 언급된 것이 다른 실시 예에서는 제 2 구성요소로 언급될 수도 있다. 여기에 설명되고 예시되는 각 실시 예는 그것의 상보적인 실시 예도 포함한다. 또한, 본 명세서에서 '및/또는'은 전후에 나열한 구성요소들 중 적어도 하나를 포함하는 의미로 사용되었다.
명세서에서 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한 복수의 표현을 포함한다. 또한, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 구성요소 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징이나 숫자, 단계, 구성요소 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 배제하는 것으로 이해되어서는 안 된다. 또한, 본 명세서에서 "연결"은 복수의 구성 요소를 간접적으로 연결하는 것, 및 직접적으로 연결하는 것을 모두 포함하는 의미로 사용된다.
또한, 하기에서 본 발명을 설명함에 있어 관련된 공지 기능 또는 구성에 대한 구체적인 설명이 본 발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 경우에는 그 상세한 설명은 생략할 것이다.
도 1 및 도 2는 본 발명의 일 실시 예에 따른 병렬 메커니즘을 설명하기 위한 도면이다.
도 1 및 도 2를 참조하면, 본 발명의 일 실시 예에 따른 병렬 메커니즘(100)은, 베이스 플레이트(110), 제1 부속 체인(120), 공유 플레이트(130), 제2 부속 체인(140) 및 무빙 플레이트(150) 중 적어도 하나를 포함하여 이루어질 수 있다.
상기 베이스 플레이트(110)는 일 실시 예에 따른 병렬 메커니즘(100)의 기저 면을 제공할 수 있다. 예를 들어, 상기 베이스 플레이트(110)는 기준 면에 고정될 수 있다. 상기 베이스 플레이트(110)는 그 형상에 제한은 없으나, 도 1 및 도 2에 도시된 바와 같이 내부에 중공이 형성된 원형 플레이트 형상을 가질 수 있다.
상기 베이스 플레이트(110)는 제1 방향으로의 회전 운동을 제공할 수 있다.
예를 들어, 상기 제1 방향으로의 회전 운동은 상기 베이스 플레이트(110)의 일 측에 마련된 구동 관절(128)에서 생성될 수 있다. 상기 구동 관절(128)은 예를 들어, 회전 모터일 수 있다. 또한, 상기 구동 관절(128)은 상기 베이스 플레이트(110)의 원주 방향을 따라 적어도 1개 배치될 수 있다. 이하에서는 설명의 편의를 위하여, 상기 구동 관절(128)이 상기 베이스 플레이트(110)의 원주 방향을 따라 3개 마련된 경우를 상정하기로 한다. 이에 따라 회전 3 자유도가 제공될 수 있다.
다른 예를 들어, 상기 제1 방향으로의 회전 운동은 상기 베이스 플레이트(110)가 아닌 다른 구성으로부터 생성될 수도 있다.
상기 베이스 플레이트(110)는 제1 부속 체인(120)과 연결될 수 있다. 부속 체인이라 함은 상기 베이스 플레이트(110)의 구동 관절(128)로부터 생성된 제1 방향으로의 회전 운동을 전달하는 구성을 의미할 수 있다. 예를 들어, 상기 제1 부속 체인(120)은 적어도 하나의 강체로 이루어질 수 있으며, 강체와 강체 사이는 링크로 이루어질 수 있다.
구체적으로 상기 제1 부속 체인(120)은 제1 회전 로드(122), 제2 회전 로드(124) 및 제3 회전 로드(126) 중 적어도 하나를 포함할 수 있다. 상기 제1 회전 로드(122)와 상기 제2 회전 로드(124) 사이 및 상기 제2 회전 로드(124) 및 상기 제3 회전 로드(126) 사이에는 링크가 마련될 수 있다.
상기 제1 회전 로드(122)의 일 단은 상기 구동 관절(128)에 결합될 수 있다. 즉, 상기 구동 관절(128)로부터 제1 방향으로의 회전 운동이 생성되는 경우, 상기 제1 회전 로드(122)도 제1 방향으로 연동하여 회전 운동할 수 있다. 또한 상기 제1 회전 로드(122)의 타 단은 상기 제2 회전 로드(124)에 연결될 수 있다. 따라서, 제1 회전 로드(122)의 움직임은 상기 제2 회전 로드(124)에 전달될 수 있다.
상기 제2 회전 로드(124)의 일 단은 상기 제1 회전 로드(122)에 연결되고, 상기 제2 회전 로드(124)의 타 단은 상기 제3 회전 로드(126)에 연결될 수 있다.
또한, 상기 제3 회전 로드(126)의 일 단은 상기 제2 회전 로드(124)에 연결되고, 상기 제3 회전 로드(126)의 타 단은 역회전 관절 모듈(170)에 연결될 수 있다.
이로써, 상기 제1 내지 제3 회전 로드(120)는 구동 관절(128)에서 회전 운동을 역회전 관절 모듈(170)에 입력 운동으로 전달할 수 있다.
상기 공유 플레이트(130)는 상기 베이스 플레이트(110)에 소정 간격 이격하여 마련될 수 있다.
상기 공유 플레이트(130)도 그 형상에 제한은 없으나, 도 1 및 도 2에 도시된 바와 같이, 내부에 중공이 형성된 원형 플레이트 형상을 가질 수 있다. 이 때, 상기 공유 플레이트(130)에 형성된 중공은 작업공간을 정의할 수 있다. 즉 일 실시 예의 병렬 메커니즘(100) 일 단에 마련된 엔드 이펙터(end effector)를 제어하기 위한 각 종 전선 등이 작업공간을 통하여 전원에 연결될 수 있다.
상기 공유 플레이트(130)의 일 측에는 역회전 관절 모듈(170)이 마련될 수 있다. 상기 역회전 관절 모듈(170)은 상기 공유 플레이트(130)의 원주 방향으로 마련될 수 있다. 예를 들어, 제1 부속 체인(120)이 3개인 경우, 상기 역회전 관절 모듈(170)도 3개일 수 있다.
상기 역회전 관절 모듈(170)은 상기 구동 관절(128)에서 생성된 제1 방향의 회전 운동을 입력받아 제2 방향의 회전 운동으로 전환하여 출력하는 구성을 의미할 수 있다. 이를 위하여 상기 역회전 관절 모듈(170)의 일 측은 제1 부속 체인(120)의 제3 회전 로드(126)에 연결되고, 상기 역회전 관절 모듈(170)의 타 측은 제2 부속 체인(140)의 제1 회전 로드(142)에 연결될 수 있다. 이에 따라, 상기 제1 부속 체인(120)의 제3 회전 로드(126)의 회전 운동이 역회전 관절 모듈(170)에 입력되면, 반대 방향으로 전환되어 상기 제2 부속 체인(140)의 제1 회전 로드(142)에 전달될 수 있다.
상기 역회전 관절 모듈(170)의 구체적인 구성에 대해서는 도 4 내지 도 7을 참조하여 후술하기로 한다.
상기 제2 부속 체인(140)은 상기 공유 플레이트(130)의 회전 운동을 무빙 플레이트(150)로 전달하는 기능을 수행할 수 있다. 상기 제2 부속 체인(140)도 제1 회전 로드(142), 제2 회전 로드(144) 및 제3 회전 로드(146)를 포함하며, 각각의 회전 로드 사이에는 링크가 마련될 수 있다.
앞서 설명한 바와 같이, 상기 제2 부속 체인(140)의 제1 회전 로드(142)는 상기 역회전 관절 모듈(170)에 연결되어, 제2 방향으로 회전할 수 있다. 상기 제1 회전 로드(142)의 제2 방향 회전 운동은 제2 회전 로드(144) 및 제3 회전 로드(146)를 통하여 무빙 플레이트(150)로 전달될 수 있다.
상기 무빙 플레이트(150)는 상기 제3 회전 로드(146)와 연결되며, 상기 제3 회전 로드(146)의 움직임 연동하여 회전 운동할 수 있다. 무빙 플레이트(150)는 구동 관절(128)에서 생성된 제1 방향으로의 회전 운동을 모사하여 회전 하되, 구동 관절(128)에서 생성된 회전 량을 증폭하여 회전할 수 있다. 이에 대한 구체적인 설명은 도 3을 참조하여 후술하기로 한다.
도 3은 본 발명의 일 실시 예에 따른 병렬 메커니즘의 동작 원리를 설명하기 위한 도면이다.
도 3을 참조하면, 베이스 플레이트(110)의 구동 관절(128)에서 생성된 제1 방향으로의 회전 운동(θ1)은 제1 부속 체인(120)을 통하여 공유 플레이트(130)으로 전달될 수 있다. 이 때, 공유 플레이트(130)에 연결된 제3 회전 로드(126)의 회전(θ2)은 역회전 관절 모듈(170)에 의하여 반대 방향으로 전환될 수 있다. 따라서, 역회전 관절 모듈(170)의 일 측에 연결된 제2 부속 체인(140)의 제1 회전 로드(142)는 구동 관절(128)의 회전 운동과 반대 방향으로 회전(-θ2) 할 수 있다.
이에 따라, 베이스 플레이트(110)가 기준 면에 고정된 상태에서, 구동 관절(128)의 회전 운동에 의하여 공유 플레이트(130)가 ΨLL 회전하는 경우, 무빙 플레이트(150)는 ΨLL 보다 큰 ΨOL 회전할 수 있다. 이는 공유 플레이트(130)를 중심으로 대칭 형태의 운동이 발생하기 때문인 것으로, 무빙 플레이트(150)의 회전 운동 각도는 두 배 증폭될 수 있다.
따라서, 본 발명의 일 실시 예에 따르면, 내부에 넓은 작업 공간을 제공하면서도, 증폭된 회전 운동을 가짐으로써, 우수한 기구학적 특성을 제공할 수 있다.
이하, 도 4 내지 도 7을 참조하여 본 발명의 일 실시 에에 따른 역회전 관절 모듈을 구체적으로 설명하기로 한다.
도 4는 본 발명의 일 실시 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 4를 참조하면 일 실시 예에 따른 역회전 관절 모듈(170a)는 제1 축(171) 및 제1 축에 평행한 제2 축(173)을 포함할 수 있다.
상기 제1 축(171)에는 제1 기어(172) 및 제5 기어(180)가 마련될 수 있다. 이 때, 제1 기어(172)와 제5 기어(180)가 독립적으로 회전할 수 있도록 제1 축(171)은 분리될 수 있다.
상기 제2 축(173)에는 제2 기어(174) 및 제3 기어(176)이 마련될 수 있다. 이 때, 상기 제2 기어(174) 및 제3 기어(176)는 종속적으로 회전할 수 있도록 제2 축(173)에 같이 마련될 수 있다. 상기 제2 기어(174)는 상기 제1 기어(172)와 맞물려 회전할 수 있다.
상기 제3 기어(176)와 상기 제5 기어(180) 사이에는 제4 기어(178)가 마련될 수 있다. 상기 제4 기어(178)는 상기 제3 기어(176) 및 상기 제5 기어(180)와 맞물려 회전할 수 있다.
이하 일 실시 예에 따른 역회전 관절 모듈(170a)의 구동 원리가 설명된다.
상기 제1 부속 체인(120)의 제1 방향 회전 운동은 제1 기어(172)에 제공될 수 있다. 이에 따라 제1 기어(172)는 제1 방향으로 회전할 수 있다. 제1 기어(172)가 회전 함에 따라 제1 기어(172)와 맞물린 제2 기어(174)는 제1 방향과 반대 방향인 제2 방향으로 회전할 수 있다. 제2 기어(174)와 동일 축에 연결된 제3 기어(176)도 제2 방향으로 회전할 수 있다. 상기 제3 기어(176)의 제2 방향 회전 운동에 의하여 제4 기어(178)는 제1 방향으로 회전하고, 다시 제5 기어(180)는 제2 방향으로 회전할 수 있다. 제5 기어(180)는 제2 부속 체인(140)의 제1 회전 로드(142)에 연결될 수 있다. 이에 따라 제1 부속 체인(120)의 제3 회전 로드(126)의 제1 방향 회전 운동은 제2 부속 체인(140)의 제1 회전 로드(142)의 제2 방향 회전 운동으로 전환될 수 있다.
도 5 및 도 6은 본 발명의 일 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 5 및 도 6을 참조하면, 일 변형 예에 따른 역회전 관절 모듈(170b)는 제1 축(181) 및 제1 축에 평행한 제2 축(183)을 포함할 수 있다.
상기 제1 축(181)에는 제1 기어(182) 및 제2 회전부(190)가 마련될 수 있다. 이 때, 제1 기어(182)와 제2 회전부(190)가 독립적으로 회전할 수 있도록 제1 축(181)은 분리될 수 있다.
상기 제2 축(183)에는 제2 기어(184) 및 제1 회전부(186)가 마련될 수 있다. 이 때, 제2 기어(184)와 제1 회전부(186)가 종속적으로 회전할 수 있도록 제2 축(183)에 같이 마련될 수 있다. 상기 제2 기어(184)는 상기 제1 기어(182)와 맞물려 회전할 수 있다.
상기 제1 회전부(186)와 상기 제2 회전부(190)는 연동 부재(188) 예를 들어, 벨트에 의하여 공통적으로 체결될 수 있다.
이하 일 변형 예에 따른 역회전 관절 모듈(170b)의 구동 원리가 설명된다.
상기 제1 부속 체인(120)의 제1 방향 회전 운동은 제1 기어(182)에 제공될 수 있다. 이에 따라 제1 기어(182)는 제1 방향으로 회전할 수 있다. 제1 기어(182)가 회전 함에 따라 제1 기어(182)와 맞물린 제2 기어(184)는 제1 방향과 반대 방향인 제2 방향으로 회전할 수 있다. 제2 기어(184)와 동일 축에 연결된 제1 회전부(186)도 제2 방향으로 회전할 수 있다. 상기 제2 회전부(190)가 제1 회전부(186)와 연동 부재(188)에 의하여 묶여 있기 때문에, 제2 회전부(190)도 제2 방향으로 회전할 수 있다. 제2 회전부(190)는 제2 부속 체인(140)의 제1 회전 로드(142)에 연결될 수 있다. 이에 따라 제1 부속 체인(120)의 제3 회전 로드(126)의 제1 방향 회전 운동은 제2 부속 체인(140)의 제1 회전 로드(142)의 제2 방향 회전 운동으로 전환될 수 있다.
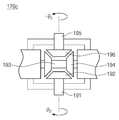
도 7은 본 발명의 다른 변형 예에 따른 역회전 관절 모듈을 설명하기 위한 도면이다.
도 7을 참조하면, 다른 변형 예에 따른 역회전 관절 모듈(170c)는 제1 축(191) 및 제1 축(191) 마련된 제1 베벨 기어(192)를 포함할 수 있다. 상기 제1 축(191)은 상기 제1 부속 체인(120)의 제3 회전 로드(126)에 의하여 제1 방향으로 회전할 수 있다. 따라서, 제1 베벨 기어(192)는 제1 방향으로 회전할 수 있다.
상기 제1 베벨 기어(192)에 역회전 기어(194)가 맞물려 회전할 수 있다. 상기 역회전 기어(194)도 베벨 기어일 수 있다. 상기 역회전 기어(194)는 도 7에 도시된 바와 같이 축(193)을 따라 대향하는 2개의 베벨 기어로 이루어질 수 있다. 이는 일 예일 뿐이며, 역회전 기어(194)가 한 개의 베벨 기어로 이루어질 수도 있다.
상기 역회전 기어(194)에 제2 축(195) 상에 마련된 제2 베벨 기어(196)가 맞물려 회전할 수 있다. 상기 제2 축(195)의 일 측에는 제2 부속 체인(140)의 제1 회전 로드(142)가 연결될 수 있다.
이에 따라, 상기 제1 부속 체인(120)의 제1 방향 회전 운동은 제1 축(191) 및 제1 베벨 기어(192)에 제공될 수 있다. 이 후, 제1 베벨 기어(192)에 맞물린 역회전 기어(194), 역회전 기어(194)에 맞물린 제2 베벨 기어(195)가 회전할 수 있다. 이에 따라, 제1 부속 체인(120)의 제3 회전 로드(126)의 제1 방향 회전 운동은 제2 부속 체인(140)의 제1 회전 로드(142)의 제2 방향 회전 운동으로 전환될 수 있다.
도 8 및 9는 본 발명의 일 실시 에에 따른 병렬 메커니즘의 구동 예를 설명하기 위한 도면이다.
참고로 도 8에 도시된 병렬 메커니즘(100)에, 도 5 및 도 6을 참조하여 상술한 역회전 관절 모듈(170b)가 장착된 것을 상정하였다.
도 8에 도시된 준비 상태에서, 구동 관절(128)을 통하여 제1 방향으로의 회전 운동이 생성되면, 제1 부속 체인(120)의 회전 로드들을 통하여 역회전 관절 모듈(170b)에 제1 방향 회전 운동이 전달될 수 있다. 상기 역회전 관절 모듈(170b)는 제1 방향과 역 방향인 제2 방향 회전 운동을 생성하고, 생성된 제2 방향 회전 운동은 제2 부속 체인(140)을 통하여 무빙 플레이트(150)에 전달될 수 있다. 이에 따라 도 9에 도시된 바와 같이, 무빙 플레이트(150)는 제1 방향으로 회전하되, 증폭된 회전 각도로 회전할 수 있다. 또한 도 9를 참조하면, 무빙 플레이트(150)의 회전에도 불구하고, 플레이트 내부의 작업공간이 여전히 유지되는 것을 확인할 수 있다.
도 10은 본 발명의 다른 실시 에에 따른 병렬 메커니즘을 설명하기 위한 도면이다.
도 1 내지 도 9를 참조하여 설명한 병렬 메커니즘(100)에서는 구동 관절(128)이 베이스 플레이트(110)의 원주 방향을 따라 3개 마련되는 것을 상정하였다. 그러나 도 10에 도시된 바와 같이, 다른 실시 예에 따른 병렬 메커니즘(100')의 구동 관절(128)은 베이스 플레이트(110)에 2개 마련될 수 있고, 이에 따라 역회전 관절 모듈(170)의 수도 2개가 될 수 있다. 이에 따라 회전형 2 자유도 병렬 구조가 제공될 수 있다. 같은 방식으로 회전형 1 자유도 병렬 구조로 변형될 수 있음은 물론이다.
상술한 본 발명의 실시 예들에 따르면, 역회전 관절 모듈을 활용하여 두 개의 병렬 구조 메커니즘 모듈의 운동이 연동되므로 하나의 병렬 구조 메커니즘 모듈 보다 넓은 작업공간을 제공할 수 있다. 또한 우수한 기구학 특성을 가지는 공간형 팬토그래프 구조를 활용하는 1 자유도, 2 자유도 그리고 3-자유도 이상의 메커니즘 구조를 제공할 수 있다.
한편, 도 1 내지 도 9를 참조하여 설명한 일 실시 예에 따른 병렬 메커니즘의 경우, 공유 플레이트에 장착된 역회전 관절 모듈을 활용하는 경우 공유 플레이트에 수직인 축에 대한 각 대칭 모듈의 회전은 상쇄되는 효과를 나타내므로 팬토그래프형 구조 손목 메커니즘의 자유도는 3개 이지만 내부적으로 서로 상쇄된 회전형 1자유도와 팬토그래프형 손목 구조 출력에서의 회전형 2자유도를 갖게 된다.
이상, 본 발명을 바람직한 실시 예를 사용하여 상세히 설명하였으나, 본 발명의 범위는 특정 실시 예에 한정되는 것은 아니며, 첨부된 특허청구범위에 의하여 해석되어야 할 것이다. 또한, 이 기술분야에서 통상의 지식을 습득한 자라면, 본 발명의 범위에서 벗어나지 않으면서도 많은 수정과 변형이 가능함을 이해하여야 할 것이다.
100: 병렬 메커니즘
110: 베이스 플레이트
120: 제1 부속 체인
130: 공유 플레이트
140: 제2 부속 체인
150: 무빙 플레이트
110: 베이스 플레이트
120: 제1 부속 체인
130: 공유 플레이트
140: 제2 부속 체인
150: 무빙 플레이트
Claims (9)
- 제1 방향으로의 회전 운동을 제공하는 베이스 플레이트;
상기 베이스 플레이트로부터의 상기 제1 방향으로의 회전 운동을 전달하는 제1 부속 체인;
상기 베이스 플레이트와 이격하여 배치되되, 상기 제1 부속 체인으로부터 상기 제1 방향으로의 회전 운동을 제2 방향으로의 회전 운동으로 전환하는 역회전 관절 모듈이 장착된 공유 플레이트;
상기 역회전 관절 모듈으로부터 상기 제2 방향으로의 회전 운동을 전달하는 제2 부속 체인; 및
상기 공유 플레이트와 이격하여 배치되고, 상기 제2 부속 체인에 의하여 상기 제1 방향으로 회전하되, 상기 베이스 플레이트에서 제공된 회전 운동이 증폭되어 회전되는, 무빙 플레이트를 포함하는 병렬 메커니즘. - 제1 항에 있어서,
상기 공유 플레이트는 내부에 작업 공간이 형성된, 병렬 메커니즘. - 제1 항에 있어서,
상기 무빙 플레이트는 상기 공유 플레이트를 중심으로 상기 베이스 플레이트와 대칭하는 형태를 가지는, 병렬 메커니즘. - 제1 항에 있어서,
상기 역회전 관절 모듈의 일 측에는 상기 제1 부속 체인이 결합되며,
상기 역회전 관절 모듈의 타 측에는 상기 제2 부속 체인이 결합되는, 병렬 메커니즘. - 제1 항에 있어서,
상기 역회전 관절 모듈은,
제1 축 상에 마련되며, 상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 기어,
제2 축 상에 마련되며, 상기 제1 기어에 맞물려 제2 방향으로 회전하는 제2 기어,
상기 제2 축 상에 마련되며, 상기 제2 기어와 동일한 방향으로 회전하는 제3 기어,
상기 제3 기어에 맞물려 제1 방향으로 회전하는 제4 기어 및
상기 제1 축 상에 마련되되, 상기 제4 기어에 연동하여 제2 방향으로 회전하는 제5 기어를 포함하며,
상기 제5 기어는 상기 제2 부속 체인의 일 단과 연결되는, 병렬 메커니즘. - 제1 항에 있어서,
상기 역회전 관절 모듈은,
제1 축 상에 마련되며, 상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 기어,
제2 축 상에 마련되며, 상기 제1 기어에 맞물려 제2 방향으로 회전하는 제2 기어,
상기 제2 축 상에 마련되며, 상기 제2 기어와 동일한 제2 방향으로 회전하는 제1 회전부,
상기 제1 축 상에 마련되며, 상기 제1 회전부와 연동 부재에 의하여 연동하여 제2 방향으로 회전하는 제2 회전부를 포함하되,
상기 제2 회전부는 상기 제2 부속 체인의 일 단과 연결되는, 병렬 메커니즘. - 제1 항에 있어서,
상기 역회전 관절 모듈은,
상기 제1 부속 체인의 제1 방향 회전 운동에 의하여 제1 방향으로 회전하는 제1 베벨 기어,
상기 제1 베벨 기어에 맞물려 회전하는 역회전 기어,
상기 역회전 기어에 맞물려 회전하는 제2 베벨 기어를 포함하며,
상기 제2 베벨 기어는 상기 제2 부속 체인의 일 단과 연결되는, 병렬 메커니즘. - 제1 항에 있어서,
상기 제1 부속 체인의 일 단은 상기 베이스 플레이트의 일 측에 연결되고, 상기 제1 부속 체인의 타 단은 상기 역회전 관절 모듈에 연결되며,
상기 제2 부속 체인의 일 단은 상기 역회전 관절 모듈에 연결되고, 상기 제2 부속 체인의 타 단은 상기 무빙 플레이트에 연결되는, 병렬 메커니즘. - 제8 항에 있어서,
상기 베이스 플레이트의 일 측에는 회전 운동을 생성하는 적어도 하나의 구동 관절이 마련되는, 병렬 메커니즘.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180171086 | 2018-12-27 | ||
| KR20180171086 | 2018-12-27 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200081202A true KR20200081202A (ko) | 2020-07-07 |
| KR102204429B1 KR102204429B1 (ko) | 2021-01-18 |
Family
ID=71603057
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190106473A KR102204429B1 (ko) | 2018-12-27 | 2019-08-29 | 병렬 메커니즘 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102204429B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114102650A (zh) * | 2021-12-27 | 2022-03-01 | 杭州电子科技大学 | 一种多自由度机器人末端执行器 |
| WO2022092874A1 (ko) * | 2020-10-28 | 2022-05-05 | 한양대학교 에리카산학협력단 | 병렬 메커니즘 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005127475A (ja) * | 2003-10-27 | 2005-05-19 | Ntn Corp | リンク作動装置 |
| JP2005144627A (ja) * | 2003-11-18 | 2005-06-09 | Ntn Corp | リンク作動装置 |
| KR20170124613A (ko) * | 2007-05-08 | 2017-11-10 | 브룩스 오토메이션 인코퍼레이티드 | 기계적 스위치 메카니즘을 이용한 복수의 가동 암들을 갖는 기판 이송 장치 |
| KR101812490B1 (ko) | 2017-07-07 | 2017-12-27 | 쓰리알웨이브 (주) | 기판 집적형 도파관의 표면실장을 위한 전이구조 설계 및 그 제조방법 |
| KR20180095171A (ko) * | 2017-02-17 | 2018-08-27 | 부산대학교 산학협력단 | 직병렬 혼합형 매니퓰레이터 |
-
2019
- 2019-08-29 KR KR1020190106473A patent/KR102204429B1/ko active IP Right Grant
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005127475A (ja) * | 2003-10-27 | 2005-05-19 | Ntn Corp | リンク作動装置 |
| JP2005144627A (ja) * | 2003-11-18 | 2005-06-09 | Ntn Corp | リンク作動装置 |
| KR20170124613A (ko) * | 2007-05-08 | 2017-11-10 | 브룩스 오토메이션 인코퍼레이티드 | 기계적 스위치 메카니즘을 이용한 복수의 가동 암들을 갖는 기판 이송 장치 |
| KR20180095171A (ko) * | 2017-02-17 | 2018-08-27 | 부산대학교 산학협력단 | 직병렬 혼합형 매니퓰레이터 |
| KR101812490B1 (ko) | 2017-07-07 | 2017-12-27 | 쓰리알웨이브 (주) | 기판 집적형 도파관의 표면실장을 위한 전이구조 설계 및 그 제조방법 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022092874A1 (ko) * | 2020-10-28 | 2022-05-05 | 한양대학교 에리카산학협력단 | 병렬 메커니즘 |
| CN114102650A (zh) * | 2021-12-27 | 2022-03-01 | 杭州电子科技大学 | 一种多自由度机器人末端执行器 |
| CN114102650B (zh) * | 2021-12-27 | 2023-11-28 | 杭州电子科技大学 | 一种多自由度机器人末端执行器 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102204429B1 (ko) | 2021-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102458112B1 (ko) | 2자유도의 구동 기구 | |
| US8109173B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| US20100186534A1 (en) | Parallel robot | |
| US8893578B2 (en) | Parallel robot provided with wrist section having three degrees of freedom | |
| US9168657B2 (en) | Parallel link robot with additional actuator arranged at driven links | |
| WO2012017722A1 (ja) | パラレル機構 | |
| US10737379B2 (en) | Compact parallel kinematics robot | |
| KR102204429B1 (ko) | 병렬 메커니즘 | |
| US11660764B2 (en) | Robot joint device | |
| KR102126037B1 (ko) | 전동 그립핑 장치 | |
| JP5423910B1 (ja) | ロボット | |
| CN209970773U (zh) | 关节单元 | |
| US20200147785A1 (en) | Parallel link robot | |
| JP2012240173A (ja) | ロボット | |
| US11130224B2 (en) | Parallel link robot | |
| KR102377640B1 (ko) | 3축 자유도가 집중된 멀티회전프레임을 포함하는 로봇의 목 구조체 | |
| US10272562B2 (en) | Parallel kinematics robot with rotational degrees of freedom | |
| US20180281206A1 (en) | Robot arm mechanism | |
| KR102207613B1 (ko) | 회전형 메커니즘 | |
| US11059189B2 (en) | Arm driving apparatus | |
| KR101444130B1 (ko) | 로봇의 어깨 관절 장치 | |
| JP5158710B2 (ja) | 干渉駆動関節機構 | |
| KR101306766B1 (ko) | 리니어 액추에이터 방식 관절 모듈 및 이를 포함하는 로봇 암 | |
| US20200049247A1 (en) | Speed reducer | |
| RU2536735C1 (ru) | Пространственный механизм с шестью степенями свободы |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |