KR20200077862A - 고강도 초음파 출력장치 - Google Patents
고강도 초음파 출력장치 Download PDFInfo
- Publication number
- KR20200077862A KR20200077862A KR1020180167164A KR20180167164A KR20200077862A KR 20200077862 A KR20200077862 A KR 20200077862A KR 1020180167164 A KR1020180167164 A KR 1020180167164A KR 20180167164 A KR20180167164 A KR 20180167164A KR 20200077862 A KR20200077862 A KR 20200077862A
- Authority
- KR
- South Korea
- Prior art keywords
- electrode module
- module
- electrode
- biological tissue
- output
- Prior art date
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/04—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by heating
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00106—Sensing or detecting at the treatment site ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00571—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for achieving a particular surgical effect
- A61B2018/00589—Coagulation
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00791—Temperature
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00827—Current
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
- A61N2007/025—Localised ultrasound hyperthermia interstitial
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Radiology & Medical Imaging (AREA)
- Plasma & Fusion (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgical Instruments (AREA)
Abstract
핸드 피스의 정립 여부를 판단하여 선택적으로 초음파를 출력함으로써 초음파의 집속 지점의 깊이와 타겟 지점의 깊이를 일치시킬 수 있고, 장치의 사이즈와 제조 비용을 증가시키지 않고 생체 조직의 표면에 화상이 발생하는 것을 방지할 수 있는 고강도 초음파 출력장치가 제공된다.
상기 고강도 초음파 출력장치는 하면의 적어도 일부가 생체 조직의 표면과 접촉하거나 인접하는 핸드 피스; 상기 핸드 피스에 배치되고, 수직 방향의 축을 중심으로 하측에 위치하는 생체 조직의 내부에 초음파를 집속시키는 출력 모듈; 상기 핸드 피스의 하면에 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제1전극 모듈; 상기 제1전극 모듈의 전기 신호의 발생 여부에 따라, 상기 출력 모듈의 작동 여부를 결정하는 제어 모듈을 포함하고, 상기 제1전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-1전극 모듈과 제1-2전극 모듈을 포함하는 것을 특징으로 한다.
상기 고강도 초음파 출력장치는 하면의 적어도 일부가 생체 조직의 표면과 접촉하거나 인접하는 핸드 피스; 상기 핸드 피스에 배치되고, 수직 방향의 축을 중심으로 하측에 위치하는 생체 조직의 내부에 초음파를 집속시키는 출력 모듈; 상기 핸드 피스의 하면에 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제1전극 모듈; 상기 제1전극 모듈의 전기 신호의 발생 여부에 따라, 상기 출력 모듈의 작동 여부를 결정하는 제어 모듈을 포함하고, 상기 제1전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-1전극 모듈과 제1-2전극 모듈을 포함하는 것을 특징으로 한다.
Description
본 발명은 정립된 상태에서 작동하여 생체 조직의 심부에 정밀하게 초음파를 인가할 수 있고, 생체 조직의 온도에 따라 초음파의 출력량을 제어하여 화상을 방지할 수 있는 통증 완화 및 병변 부위 치료용 고강도 초음파 출력장치에 관한 것이다.
고강도 초음파 출력장치(HIFU Device)는 초음파를 생체 조직에 집속시켜 통증을 완화시키거나, 열에너지에 의해 병변 부위(일 예로, 자궁근종)를 응고성 괴사시킴으로써 주변 조직(의 손상 없이 병변 부위를 사멸시키는 치료 장치이다.
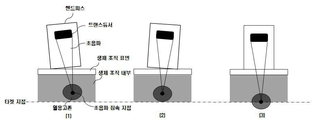
도 1에서 나타내는 바와 같이, 고강도 초음파 출력장치는 트랜스듀서가 마련된 핸드 피스를 생체 조직의 표면(표피, Epidermis)에 접촉시키고 트랜스듀서를 작동시킴으로써, 생체 조직 내부의 통증 발생 부위나 병변 부위(타겟 지점)에 초음파를 집속시킬 수 있다.
그러나 일반적인 고강도 초음파 출력장치는 핸드 피스의 자세의 정립 여부를 판단할 수 없기 때문에, 핸드 피스가 기울어진 상태에서도 작동함으로써 초음파의 집속 지점의 깊이와 타겟 지점의 깊이가 달라져 치료 효과가 떨어지는 문제가 있다(도 1의 (1), (2) 참조).
만약, 핸드 피스의 정립 여부를 판단하여 핸드 피스가 정립된 상태에서만 선택적으로 초음파를 출력한다면, 초음파의 집속 지점의 깊이와 타겟 지점의 깊이가 일치되어 통증 치료 효과와 병변 제거 효과가 향상될 수 있을 것이다(도 1의 (3) 참조).
또한, 일반적인 고강도 초음파 출력장치는 냉각수를 이용하여 생체 조직의표면에 화상이 발생하는 것을 방지하는데, 냉각수 순환 시스템에 의해 장치의 사이즈와 제조 비용이 증가하는 문제가 있다.
본 발명이 해결하고자 하는 과제는 핸드 피스의 정립 여부를 판단하여 선택적으로 초음파를 출력함으로써 초음파의 집속 지점의 깊이와 타겟 지점의 깊이를 일치시킬 수 있고, 장치의 사이즈와 제조 비용을 증가시키지 않고 생체 조직의 표면에 화상이 발생하는 것을 방지할 수 있는 고강도 초음파 출력장치를 제공하는 것이다.
본 발명이 해결하고자 하는 과제들은 이상에서 언급된 과제로 제한되지 않으며, 언급되지 않은 또 다른 과제들은 아래의 기재로부터 통상의 기술자에게 명확하게 이해될 수 있을 것이다.
상술한 과제를 해결하기 위한 본 발명의 일 면에 따른 고강도 초음파 출력장치는 하면의 적어도 일부가 생체 조직의 표면과 접촉하거나 인접하는 핸드 피스; 상기 핸드 피스에 배치되고, 수직 방향의 축을 중심으로 하측에 위치하는 생체 조직의 내부에 초음파를 집속시키는 출력 모듈; 상기 핸드 피스의 하면에 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제1전극 모듈; 상기 제1전극 모듈의 전기 신호의 발생 여부에 따라, 상기 출력 모듈의 작동 여부를 결정하는 제어 모듈을 포함하고, 상기 제1전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-1전극 모듈과 제1-2전극 모듈을 포함하는 것을 특징으로 할 수 있다.
상기 출력 모듈은 트랜스듀서이고, 상기 출력 모듈의 초음파는 상기 수직 방향의 축을 기준으로 포커싱되어, 상기 생체 조직의 내부에 집속되는 것을 특징으로 할 수 있다.
상기 제어 모듈은 상기 제1-1전극 모듈과 상기 제1-2전극 모듈 모두에서 전기 신호가 발생하는 경우에 상기 출력 모듈을 작동시키는 것을 특징으로 할 수 있다.
상기 전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-3전극 모듈과 제1-4전극 모듈을 더 포함하고, 상기 제1-1전극 모듈과 상기 제1-2전극 모듈은 상기 수직 방향과 수직한 가상의 제1대각선 상에 배치되고, 상기 제1-3전극 모듈과 상기 제1-4전극 모듈은 상기 수직 방향과 수직한 가상의 제2대각선 상에 배치되고, 상기 제1대각선과 상기 제2대각선은 상호 수직하게 배치되는 것을 특징으로 할 수 있다.
상기 제1-1전극 모듈과 상기 제1-2전극 모듈과 상기 제1-3전극 모듈과 상기 제1-4전극 모듈은 상기 수직 방향에서 동일한 위상에 위치하고, 상기 제1대각선과 상기 제2대각선의 교차점은 상기 수직 방향의 축에서 형성되는 것을 특징으로 할 수 있다.
상기 제어부는 상기 제1전극 모듈의 전기 신호로부터 생체 조직의 온도를 판단하고, 생체 조직의 온도에 따라 상기 출력 모듈의 출력량을 제어하는 것을 특징으로 할 수 있다.
상기 고강도 초음파 출력장치는 상기 핸드 피스의 하면에 배치되고, 상기 제1전극 모듈과 이격되어 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제2전극 모듈을 더 포함하고, 상기 제어 모듈은 상기 제2전극 모듈의 전기 신호로부터 생체 조직의 온도를 판단하고, 생체 조직의 온도에 따라 상기 출력 모듈의 출력량을 제어하는 것을 특징으로 할 수 있다.
상기 제2전극 모듈은 상기 제1-1전극 모듈과 이웃하여 배치되는 제2-1전극 모듈과, 상기 제1-2전극 모듈과 이웃하여 배치되는 제2-2전극 모듈을 포함하는 것을 특징으로 할 수 있다.
상기 제1전극 모듈은 전원기와 전기적으로 연결되고, 상기 제2전극 모듈은 전류 측정기 및 전압 측정기 중 적어도 하나와 전기적으로 연결되는 것을 특징으로 할 수 있다.
상기 제1-1전극 모듈과 상기 제1-2전극 모듈 각각은 모노 폴라 타입의 전극 모듈이거나 바이 폴라 타입의 전극 모듈이고, 상기 제1-1전극 모듈과 상기 제1-2전극 모듈 각각이 모노 폴라 타입의 전극 모듈인 경우, 일방에 인가된 전류는 타방에서 환류되는 것을 특징으로 할 수 있다.
본 발명에서는 생체 조직의 표면과 접촉하여 전기 신호를 발생시키는 제1전극 모듈(자세 측정 전극)에 의해 핸드 피스의 정립 여부를 판단할 수 있다. 따라서 본 발명에서는 핸드 피스의 정립 여부에 따라 선택적으로 초음파를 출력할 수 있고, 그 결과, 초음파의 집속 지점의 깊이와 타겟 지점의 깊이를 일치시켜 치료 효과를 향상시킬 수 있는 고강도 초음파 출력장치를 제공한다.
나아가 본 발명에서는 제1전극 모듈의 전기 신호의 임피던스를 이용하거나 별도로 마련된 제2전극 모듈(온도 측정 전극)의 전기 신호의 임피던스를 이용하여 생체 조직의 온도를 판단하고, 이에 따라 초음파의 출력량을 제어할 수 있다. 그 결과, 냉각수 순환 시스템을 생략하여 장치의 사이즈와 제조 비용을 감소시킬 수 있다.
본 발명의 효과들은 이상에서 언급된 효과로 제한되지 않으며, 언급되지 않은 또 다른 효과들은 아래의 기재로부터 통상의 기술자에게 명확하게 이해될 수 있을 것이다.
도 1은 일반적인 고강도 초음파 출력장치에서 핸드 피스의 정립 여부에 따라, 초음파의 집속 지점이 변경되는 것을 나타낸 개념도이다.
도 2는 본 발명의 고강도 초음파 출력장치를 나타낸 사시도이다.
도 3은 본 발명의 핸드 피스를 나타낸 사시도이다.
도 4는 본 발명의 핸드 피스에 의해 초음파가 출력되는 것을 나타낸 개념도이다.
도 5는 본 발명의 핸드 피스를 나타낸 저면도이다.
도 6은 본 발명의 핸드 피스의 정립 여부에 따라 초음파가 출력되는 것을 나타낸 개념도이다.
도 7은 본 발명의 다른 실시예의 핸드 피스를 나타낸 저면도이다.
도 8은 본 발명의 다른 실시예의 핸드 피스에서 제1전극 모듈과 제2전극 모듈의 전기 계통을 나타낸 계통도이다.
도 2는 본 발명의 고강도 초음파 출력장치를 나타낸 사시도이다.
도 3은 본 발명의 핸드 피스를 나타낸 사시도이다.
도 4는 본 발명의 핸드 피스에 의해 초음파가 출력되는 것을 나타낸 개념도이다.
도 5는 본 발명의 핸드 피스를 나타낸 저면도이다.
도 6은 본 발명의 핸드 피스의 정립 여부에 따라 초음파가 출력되는 것을 나타낸 개념도이다.
도 7은 본 발명의 다른 실시예의 핸드 피스를 나타낸 저면도이다.
도 8은 본 발명의 다른 실시예의 핸드 피스에서 제1전극 모듈과 제2전극 모듈의 전기 계통을 나타낸 계통도이다.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나, 본 발명은 이하에서 개시되는 실시예들에 제한되는 것이 아니라 서로 다른 다양한 형태로 구현될 수 있으며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하고, 본 발명이 속하는 기술 분야의 통상의 기술자에게 본 발명의 범주를 완전하게 알려주기 위해 제공되는 것이며, 본 발명은 청구항의 범주에 의해 정의될 뿐이다.
본 명세서에서 사용된 용어는 실시예들을 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 "포함한다(comprises)" 및/또는 "포함하는(comprising)"은 언급된 구성요소 외에 하나 이상의 다른 구성요소의 존재 또는 추가를 배제하지 않는다. 명세서 전체에 걸쳐 동일한 도면 부호는 동일한 구성 요소를 지칭하며, "및/또는"은 언급된 구성요소들의 각각 및 하나 이상의 모든 조합을 포함한다. 비록 "제1", "제2" 등이 다양한 구성요소들을 서술하기 위해서 사용되나, 이들 구성요소들은 이들 용어에 의해 제한되지 않음은 물론이다. 이들 용어들은 단지 하나의 구성요소를 다른 구성요소와 구별하기 위하여 사용하는 것이다. 따라서, 이하에서 언급되는 제1 구성요소는 본 발명의 기술적 사상 내에서 제2 구성요소일 수도 있음은 물론이다.
다른 정의가 없다면, 본 명세서에서 사용되는 모든 용어(기술 및 과학적 용어를 포함)는 본 발명이 속하는 기술분야의 통상의 기술자에게 공통적으로 이해될 수 있는 의미로 사용될 수 있을 것이다. 또한, 일반적으로 사용되는 사전에 정의되어 있는 용어들은 명백하게 특별히 정의되어 있지 않는 한 이상적으로 또는 과도하게 해석되지 않는다.
공간적으로 상대적인 용어인 "아래(below)", "아래(beneath)", "하부(lower)", "위(above)", "위(upper)" 등은 도면에 도시되어 있는 바와 같이 하나의 구성요소와 다른 구성요소들과의 상관관계를 용이하게 기술하기 위해 사용될 수 있다. 공간적으로 상대적인 용어는 도면에 도시되어 있는 방향에 더하여 사용시 또는 동작시 구성요소들의 서로 다른 방향을 포함하는 용어로 이해되어야 한다. 예를 들어, 도면에 도시되어 있는 구성요소를 뒤집을 경우, 다른 구성요소의 "아래(below)"또는 "아래(beneath)"로 기술된 구성요소는 다른 구성요소의 "위(above)"에 놓여질 수 있다. 따라서, 예시적인 용어인 "아래"는 아래와 위의 방향을 모두 포함할 수 있다. 구성요소는 다른 방향으로도 배향될 수 있으며, 이에 따라 공간적으로 상대적인 용어들은 배향에 따라 해석될 수 있다.
이하, 도면을 참조하여 본 발명의 고강도 초음파 출력장치(1000)를 설명한다. 도 2는 본 발명의 고강도 초음파 출력장치를 나타낸 사시도이고, 도 3은 본 발명의 핸드 피스를 나타낸 사시도이고, 도 4는 본 발명의 핸드 피스에 의해 초음파가 출력되는 것을 나타낸 개념도이고, 도 5는 본 발명의 핸드 피스를 나타낸 저면도이고, 도 6은 본 발명의 핸드 피스의 정립 여부에 따라 초음파가 출력되는 것을 나타낸 개념도이다.
이하, "수직 방향"과 "수직 방향의 축"은 도 4에 도시된 수직 방향 및 수직 방향 축일 수 있다. 또한, "수직 방향"은 핸드 피스가 정립된 상태(기울어지지 않은 상태)에서 생체 조직의 표면의 주면과 수직한 방향일 수 있다. 따라서 "수직 방향"은 "상하 방향"과 혼용될 수 있으며, "수직 방향의 일측"은 상측일 수 있고 "수직 방향의 타측"은 하측일 수 있다.
본 발명의 고강도 초음파 출력장치(1000)는 본체(100), 디스플레이 모듈(200), 조작 모듈(300), 케이블(400), 핸드 피스(500), 출력 모듈(600), 제1전극 모듈(700), 제2전극 모듈(800) 및 제어 모듈(미도시)을 포함할 수 있다.
이하, 본 발명의 고강도 초음파 출력장치를 설명함에 있어서, 의료 산업용으로 사용되는 고강도 초음파 출력장치를 예를 들어 설명한다. 다만, 본 발명의 고강도 초음파 출력장치가 이에 한정되는 것은 아니다.
일 예로, 본 발명의 고강도 초음파 출력장치는 가정용, 휴대용으로 사용되는 고강도 초음파 출력장치일 수도 있다. 이 경우, 본 발명의 고강도 초음파 출력장치에서 본체(100), 디스플레이 모듈(200) 및 케이블(400)은 생략될 수 있으며, 조작 모듈(300)과 제어 모듈은 본체(100)가 아닌 핸드 피스(500)에 구비될 수 있다.
즉, 휴대용 및 가정용 고강도 초음파 출력장치는 핸드 피스(500)가 전체적인 외관을 형성하며 조작, 보관 및 휴대 등이 용이할 수 있다.
본체(100)에는 디스플레이 모듈(200)과 조작 모듈(300)이 구비될 수 있다. 또한, 본체(100)에는 제어 모듈의 적어도 일부가 내장될 수 있다.
디스플레이 모듈(200)은 패널(Pannel) 형태로 제작되어 수술을 진행하고 있는 의사에게 다양한 정보를 시각적으로 제공할 수 있다.
일 예로, 디스플레이 모듈(200)에는 생체 조직의 내부에 인가되는 초음파의 출력량이나 이에 따른 임피던스 등이 그래프화되어 표시될 수 있다. 또한, 디스플레이 모듈(200)에는 본 발명의 고강도 초음파 출력장치(1000)가 현재 진행하고 있는 운전 모드가 표시될 수 있다. 또한, 디스플레이 모듈(200)에는 생체 조직이 가지고 있는 다양한 생체 정보(혈류, 맥박 등)가 표시될 수 있다.
조작 모듈(300)은 본체(100)의 외측면에 버튼 형태로 마련될 수 있다. 의사는 조작 모듈(300)을 통해 수동으로 고강도 초음파 출력장치(1000)를 On/Off하거나, 고강도 초음파 출력장치(1000)의 운전 모드를 선택할 수 있고, 출력 모듈(300)을 On/Off하거나, 출력 모듈(300)의 고주파의 출력량 등을 변경할 수 있다. 한편, 상술한 조작 모듈(300)에 의한 "수동 제어"는 후술하는 제어 모듈에 의한 "자동 제어"와 구별된다.
디스플레이 모듈(200)은 터치 스크린(Touch screen) 형태로 마련될 수도 있다. 이 경우, 조작 모듈(300)의 적어도 일부는 생략될 수 있다. 의사는 디스플레이 모듈(200)의 화면에 나타나는 메뉴를 터치하여 고강도 초음파 출력장치(1000)를 조작할 수 있다.
케이블(400)은 출력 모듈(600), 제1전극 모듈(700) 및 제2전극 모듈(800)과 제어 모듈을 전기적으로 연결할 수 있다. 즉, 케이블(400)은 도전 라인과 같은 기능을 수행할 수 있다. 이를 위해, 케이블(400)은 본체(100)에서 일측으로 연장되어, 본체(100)와 핸드 피스(500)를 연결할 수 있다. 케이블(400)에는 전자 신호의 종류 별로 각각의 채널을 형성하도록, 복수 개의 전선이 내장될 수 있고, 케이블(400)의 외피는 다양한 채널의 전선 다발을 절연 피복할 수 있다.
핸드 피스(500)는 의사가 파지하여 초음파의 집속 지점을 설정하는 부재일 수 있다. 의사는 핸드 피스(500)의 하면을 대상자의 생체 조직의 표면에 접촉시키거나 인접시킨 상태에서 이동시켜, 초음파의 집속 지점을 변경할 수 있다. 핸드 피스(500)는 케이블(400)에 배치될 수 있고, 케이블(400)이 연장된 방향의 단부에 위치할 수 있다.
핸드 피스(500)에는 출력 모듈(600), 제1전극 모듈(700) 및 제2전극 모듈(800)이 배치될 수 있다. 이 경우, 출력 모듈(600)은 핸드 피스(500)의 내부에 배치될 수 있고, 제1전극 모듈(700) 및 제2전극 모듈(800)은 핸드 피스(500)의 하면에 배치될 수 있다.
핸드 피스(500)는 케이스(510), 팁(520), 챔버(530), 탈기수(540) 및 투과캡(550)을 포함할 수 있다.
케이스(510)는 핸드 피스(500)의 외관을 형성하는 외장 부재일 수 있다. 케이스(510)는 중공 형태일 수 있다. 케이스(510)의 하측 단부에는 팁(520)이 배치될 수 있다. 따라서 팁(520)의 하면은 핸드 피스(500)의 하면을 형성할 수 있다. 팁(520)은 케이스(510)에 분리가 가능하게 장착될 수 있다. 팁(520)은 교체 가능하도록 카트리지 형태로 제작될 수 있다.
챔버(530)는 팁(520)에 마련된 공간으로 탈기수(540)를 수용하는 공간일 수 있다. 탈기수(540)는 출력 모듈(600)의 초음파가 투과하여 진행하는 매질일 수 있다. 투과캡(550)은 플레이트 형태로 팁(520)의 하면의 중앙에 배치될 수 있으며, 출력 모듈(600)의 초음파가 투과하는 부분일 수 있다. 투과캡(550)이 배치되기 위해, 팁(520)의 하면의 중앙에는 개방 형태의 수용 공간이 형성될 수 있다.
출력 모듈(600)은 "수직 방향의 축"을 중심으로 하측에 위치하는 생체 조직의 내부에 열에너지를 인가하는 모듈일 수 있다. 즉, 출력 모듈(500)은 초음파를 출력하는 트랜스듀서(Transducer)일 수 있다.
출력 모듈(600)은 핸드 피스(500)의 내부에 배치될 수 있다. 이 경우, 출력 모듈(600)은 핸드 피스(500)의 케이스(510)의 내부 또는 핸드 피스(500)의 팁(520)의 내부 중 적어도 하나에 배치될 수 있다.
출력 모듈(600)의 초음파는 탈기수(540)와 투과캡(550)을 차례로 투과할 수 있다. 출력 모듈(600)의 초음파는 "수직 방향의 축"을 기준으로 포커싱될 수 있고, 생체 조직의 표피층을 투과하여 생체 조직 내부의 병변 부위나 통증 부위(타겟 지점)에서 집속될 수 있다. 이 경우, 출력 모듈(600)의 초음파는 타겟 지점을 중심으로 열에너지에 의해 응고되는 열응고존을 형성할 수 있다.
제1전극 모듈(700)은 생체 조직의 표면과 접촉하여 전기 신호를 발생할 수 있다. 제1전극 모듈(700)의 전기 신호를 통해 핸드 피스(500)의 정립 여부를 판단할 수 있다. 따라서 제1전극 모듈(700)은 "자세 측정 전극 모듈"로 호칭될 수 있다.
제1전극 모듈(700)은 핸드 피스(500)의 하면에 배치될 수 있다. 좀 더 상세하게, 제1전극 모듈(700)은 핸드 피스(500)의 팁(520)의 하면에 배치될 수 있다. 또한, 제1전극 모듈(700)은 전원기와 연결되어 교류 전류 또는 직류 전류를 인가받을 수 있다.
이 경우, 제1전극 모듈(700)은 핸드 피스(500)의 투과캡(550)과 수직 방향으로 오버랩되지 않게 배치될 수 있다. 즉, 제1전극 모듈(700)은 핸드 피스(500)의 팁(520)의 하면의 가장자리에 배치될 수 있고, 핸드 피스(500)의 투과캡(550)은 핸드 피스(500)의 팁(520)의 하면의 중심에 배치될 수 있으며 핸드 피스(500)의 팁(520)의 하면의 중심을 형성할 수 있다.
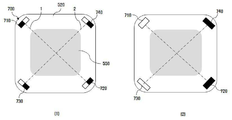
제1전극 모듈(700)은 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)을 포함할 수 있다. 핸드 피스(500)의 정립 여부를 판단함에 있어서, 제1-1전극 모듈(710)과 제1-2전극 모듈(720)은 하나의 그룹을 형성하여 판단 정보를 제공할 수 있고, 제1-3전극 모듈(730)과 제1-4전극 모듈(740)은 다른 그룹을 형성하여 판단 정보를 제공할 수 있다.
제1-1전극 모듈(710)과 제1-2전극 모듈(720)은 "수직 방향의 축"을 기준으로 대칭으로 배치될 수 있고, 제1-3전극 모듈(730)과 제1-4전극 모듈(740)은 "수직 방향의 축"을 기준으로 대칭으로 배치될 수 있다.
제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 "수직 방향"에서 동일한 위상에 위치할 수 있다. 즉, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 수직 방향과 수직한 가상의 평면 상에 위치할 수 있다.
이 경우, 제1-1전극 모듈(710)과 제1-2전극 모듈(720)은 "수직 방향"과 수직한 가상의 제1대각선(1) 상에 배치될 수 있고, 제1-3전극 모듈(730)과 제1-4전극 모듈(740)은 "수직 방향"과 수직한 가상의 제2대각선(2) 상에 배치될 수 있고, 제1대각선(1)과 제2대각선(2)은 상호 수직하게 배치될 수 있다. 나아가 제1대각선(1)과 제2대각선(2)은 교차할 수 있으며, 제1대각선(1)과 제2대각선(2)의 교차점은 "수직 방향의 축"에 형성될 수 있다.
제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740) 각각은 두 개의 극성을 가지는 바이 폴라 타입(도 5의 (1) 참조, Bipolar type)의 전극 모듈이거나 하나의 극성을 가지는 모노 폴라 타입(도 5의 (2) 참조, Monopolar type)의 전극 모듈일 수 있다.
제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 바이 폴라 타입인 경우, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 독립적으로 전원기와 연결되어 전원을 공급받을 수 있다.
즉, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 독립적으로 회로를 형성할 수 있다.
따라서 제1전극 모듈(700)이 생체 조직의 표면과 접촉하는 경우, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 독립적으로 "전기 신호"를 발생할 수 있다.
즉, 제1-1전극 모듈(710)은 제1전기 신호를 발생할 수 있고 이는 제1-1전극 모듈(710)이 생체 조직의 표면과 접촉하는 것을 의미할 수 있다. 또한, 제1-2전극 모듈(720)은 제2전기 신호를 발생할 수 있고 이는 제1-2전극 모듈(720)이 생체 조직의 표면과 접촉하는 것을 의미할 수 있다. 또한, 제1-3전극 모듈(730)은 제3전기 신호를 발생할 수 있고 이는 제1-3전극 모듈(730)이 생체 조직의 표면과 접촉하는 것을 의미할 수 있다. 또한, 제1-4전극 모듈(740)은 제4전기 신호를 발생할 수 있고 이는 제1-3전극 모듈(740)이 생체 조직의 표면과 접촉하는 것을 의미할 수 있다.
평상 시, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)의 각각의 제1극과 제2극은 전기적으로 연결되지 않아 "전기 신호"가 발생되지 않는다.
그러나 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 생체 조직과 접촉하면, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)의 각각의 제1극과 제2극은 도체인 생체 조직을 통해 전기적으로 연결되어 "전기 신호"를 발생할 수 있다. 이 경우, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 전원기로부터 전원을 공급받으므로, 생체 조직에 고주파(RF, Radio Frequency)를 생성하게 된다. 따라서 제1전극 모듈(700)은 "RF 전극 모듈"로 호칭될 수 있다.
즉, "전기 신호"는 전원기로부터 전원을 인가받은 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 생체 조직에 고주파를 발생시켜 전류의 흐름을 생성함으로써 발생하는 신호일 수 있다.
제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 모노 폴라 타입인 경우, 제1-1전극 모듈(710) 및 제1-2전극 모듈(720)이 함께 전원기와 연결되어 전원을 공급받을 수 있고, 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 함께 전원기와 연결되어 전원을 공급받을 수 있다.
즉, 제1-1전극 모듈(710)과 제1-2전극 모듈(720)이 하나의 회로를 형성할 수 있고, 제1-3전극 모듈(730)과 제1-4전극 모듈(740)이 다른 하나의 회로를 형성할 수 있다.
따라서 제1전극 모듈(700)과 생체 조직의 표면과 접촉하는 경우, 제1-1전극 모듈(710)과 제1-2전극 모듈(720)은 함께 "전기 신호"를 발생할 수 있고, 제1-3전극 모듈(730)과 제1-4전극 모듈(740)은 함께 "전기 신호"를 발생할 수 있다.
즉, 제1-1전극 모듈(710) 및 제1-2전극 모듈(720)은 함께 제1전기 신호를 발생할 수 있고 이는 제1-1전극 모듈(710) 및 제1-2전극 모듈(720) 모두가 생체 조직의 표면과 접촉하는 것을 의미할 수 있다. 또한, 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 함께 제2전기 신호를 발생할 수 있고 이는 제1-3전극 모듈(730) 및 제1-4전극 모듈(740) 모두가 생체 조직의 표면과 접촉하는 것을 의미할 수 있다.
이 경우, "전기 신호"는 전원기로부터 전원을 인가받은 제1-1전극 모듈(710) 및 제1-2전극 모듈(720)이 생체 조직에 고주파를 발생시켜 전류의 흐름을 생성함으로써 발생하는 신호일 수 있다(제1-3전극 모듈과 제1-4전극 모듈의 경우에도 동일). 즉, 제1-1전극 모듈(710)과 제1-2전극 모듈(720) 중 일방에 인가된 전류는 타방에서 환류될 수 있다.
상술한 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 "수직 방향의 축"을 기준으로 대칭적으로 배치되는 특징과 생체 조직의 표피층에 접촉 시 전기 신호를 발생하는 특징에 의해, 핸드 피스(500)의 정립 여부를 판단할 수 있다.
즉, 바이 폴라 타입의 경우, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740) 중 적어도 하나가 생체 조직의 표피층에 접촉하지 않으면, 제1전기 신호와 제2전기 신호와 제3전기 신호와 제4전기 신호 중 적어도 하나가 발생하지 않고, 이에 따라, 핸드 피스(500)가 정립 상태에 있지 않은 것(기울어진 상태)으로 판단될 수 있다(도 6의 (1), (2) 참조). 이와 달리, 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740) 모두가 생체 조직의 표면에 접촉하면, 제1전기 신호와 제2전기 신호와 제3전기 신호와 제4전기 신호가 모두 발생하고, 이에 따라, 핸드 피스(500)가 정립 상태에 있는 것으로 판단할 수 있다(도 6의 (3) 참조).
한편, 모노 폴라 타입의 경우, 제1-1전극 모듈(710) 및 제1-2전극 모듈(720) 중 적어도 하나가 생체 조직의 표면과 접촉하지 않으면 제1전기 신호가 발생하지 않고, 제1-3전극 모듈(730) 및 제1-4전극 모듈(740) 중 적어도 하나가 생체 조직의 표면에 접촉하지 않으면 제2전기 신호가 발생하지 않는다. 만약, 제1전기 신호와 제2전기 신호 중 적어도 하나가 발생하지 않으면, 핸드 피스(500)가 정립 상태에 있지 않은 것(기울어지 상태)으로 판단할 수 있다(도 6의 (1), (2) 참조). 이와 달리, 제1전기 신호와 재2전기 신호가 모두 발생한다면, 핸드 피스(500)가 정립 상태에 있는 것으로 판단할 수 있다(도 6의 (3) 참조).
한편, 바람직하게는 제1-1전극 모듈(710), 제1-2전극 모듈(720), 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)이 모두 존재하는 것이 좋으나, 기계적 및 전기적 설계 요청에 의해 제1-3전극 모듈(730) 및 제1-4전극 모듈(740)은 생략될 수도 있다. 즉, 제1-1전극 모듈(710)과 제1-2전극 모듈(720)만 존재할 수도 있다. 이러한 경우에도 제1-1전극 모듈(710) 및 제1-2전극 모듈(720)은 "수직 방향의 축"을 기준으로 대칭으로 배치되어 있으므로, 핸드 피스(500)의 틸팅 여부(기울어짐 여부)를 판단할 수 있음이 자명하다.
제어 모듈(미도시)은 제1전극 모듈(700)의 전기 신호의 발생 여부에 따라, 출력 모듈(600)의 작동 여부를 결정할 수 있다. 즉, 제어 모듈은 핸드 피스(500)가 정립된 경우에만 선택적으로 출력 모듈(600)을 작동시킬 수 있다(출력 모듈 On). 이를 위해, 제어 모듈은 출력 모듈(600) 및 제1전극 모듈(700)과 전기적으로 연결될 수 있다.
좀 더 상세하게, 제어 모듈은 제1전극 모듈(700)에서 발생하는 전기 신호를 수신하여, 제1전극 모듈(700)의 모든 전극 모듈이 생체 조직의 표면에 접촉한 경우(바이 폴라 타입의 경우 제1 내지 제4전기 신호가 발생하는 경우, 모노 폴라 타입의 경우 제1 및 제2전기 신호가 발생하는 경우), 출력 모듈(600)을 작동시킬 수 있다. 이와 달리, 제어 모듈은 제1전극 모듈(700)의 모든 전극 모듈 중 적어도 하나라도 생체 조직의 표면에 접촉하지 않은 경우, 출력 모듈(600)의 작동을 중지할 수 있다(출력 모듈 Off).
제어 모듈의 자동 제어에 의해, 핸드 피스(500)가 정립 상태에 있을 때만 출력 모듈(600)이 작동하여, 출력 모듈(600)의 초음파의 집속 지점의 깊이와 타겟 지점의 깊이가 일치됨으로써, 병변 제거 효과 또는 통증 치료 효과가 향상될 수 있다. 나아가 제어 모듈의 자동 제어에 의해, 핸드 피스(500)가 정립 상태에 있지 않고 기울어진 경우에는 출력 모듈(600)이 작동되지 않아 타겟 지점이 아닌 곳에 초음파를 집속시키는 것을 방지할 수 있다.
나아가 제어 모듈은 제1전극 모듈(700)의 전기 신호로부터 생체 조직의 온도를 판단할 수 있고, 생체 조직의 온도에 따라 출력 모듈(600)의 출력량을 제어하여, 과도한 열에너지에 의해 생체 조직에 화상이 발생하는 것을 방지할 수 있다.
좀 더 상세하게, 제어 모듈은 제1전극 모듈(700)의 전기 신호로부터 회로를 흐르는 전류의 값을 획득할 수 있고, 이로부터 임피던스 값을 산출할 수 있다. 생체 조직의 온도와 임피던스는 상호 비례하는 관계에 있으므로(선형적 관계), 임피던스 값으로부터 생체 조직의 온도를 산출할 수 있다. 이를 위해, 제1전극 모듈(700)의 각각의 회로에는 전원기 외에 전류 측정기나 전압 측정기가 추가될 수 있다.
제어 모듈은 생체 조직의 온도가 높아지는 경우 출력 모듈(600)의 출력량을 낮출 수 있고 경우에 따라 출력 모듈(600)의 작동을 중지할 수도 있다. 이와 달리, 제어 모듈은 생체 조직의 온도가 낮아지는 경우 출력 모듈(600)의 출력량을 높혀 치료 효과를 높일 수 있다.
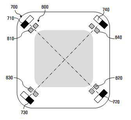
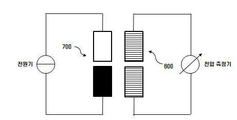
이하, 도면을 참조하여 본 발명의 다른 실시예의 핸드 피스를 설명한다. 도 7은 본 발명의 다른 실시예의 핸드 피스를 나타낸 저면도이고, 도 8은 본 발명의 다른 실시예의 핸드 피스에서 제1전극 모듈과 제2전극 모듈의 전기 계통을 나타낸 전기 계통도이다.
본 발명의 다른 실시예의 핸드 피스에서는 제2전극 모듈(800)이 추가될 수 있다. 한편, 도 7에서는 제1전극 모듈(700)이 바이 폴라 타입인 경우를 도시하였지만, 이에 한정되는 것은 아니고 본 발명의 다른 실시예의 핸드 피스는 제1전극 모듈(700)이 모노 폴라 타입인 경우에도 후술하는 기술적 특징이 유추 적용될 수 있다.
제2전극 모듈(800)은 생체 조직의 온도를 정확하게 측정하기 위해 별도로 마련된 전극 모듈일 수 있다. 즉, 본 발명의 다른 실시예의 핸드 피스에서는 제1전극 모듈(700)은 핸드 피스의 정립 여부를 측정하는데 사용될 수 있고, 제2전극 모듈(800)은 생체 조직의 온도를 측정하는데 사용될 수 있다. 따라서 제2전극 모듈(800)은 "온도 측정 전극 모듈"로 호칭될 수 있다.
이를 위해, 제1전극 모듈(700)은 전원기와 전기적으로 연결되어 전원을 인가받을 수 있고, 제2전극 모듈(800)은 전류 측정기 또는 전압 측정기와 전기적으로 연결되어 제1전극 모듈(700)이 생체 조직에 인가하는 전류에 의해 발생하는 포텐셜 필드(Potential field)를 바탕으로 생체 조직을 흐르는 전류의 값을 측정할 수 있다.
상술한 바와 마찬가지로, 제어 모듈은 제2전극 모듈(800)의 전기 신호(전류의 값)로부터 생체 조직의 온도를 판단하고, 생체 조직의 온도에 따라 출력 모듈(600)의 출력량을 제어할 수 있다.
제2전극 모듈(800)은 제1-1전극 모듈(710)과 이웃하여 배치되는 제2-1전극 모듈(810)과, 제1-2전극 모듈(720)과 이웃하여 배치되는 제2-2전극 모듈(820)과, 제1-3전극 모듈(730)과 이웃하여 배치되는 제2-3전극 모듈(830)과, 제1-4전극 모듈(740)과 이웃하여 배치되는 제2-4전극 모듈(840)을 포함할 수 있다.
제2전극 모듈(800)의 각각의 전극 모듈은 2개의 극성을 가지며, 제2전극 모듈의 각각의 전극 모듈은 독립적으로 회로를 형성할 수 있다.
이상, 첨부된 도면을 참조로 하여 본 발명의 실시예를 설명하였지만, 본 발명이 속하는 기술분야의 통상의 기술자는 본 발명이 그 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 실시될 수 있다는 것을 이해할 수 있을 것이다. 그러므로, 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며, 제한적이 아닌 것으로 이해해야만 한다.
Claims (10)
- 하면의 적어도 일부가 생체 조직의 표면과 접촉하거나 인접하는 핸드 피스;
상기 핸드 피스에 배치되고, 수직 방향의 축을 중심으로 하측에 위치하는 생체 조직의 내부에 초음파를 집속시키는 출력 모듈;
상기 핸드 피스의 하면에 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제1전극 모듈; 및
상기 제1전극 모듈의 전기 신호의 발생 여부에 따라, 상기 출력 모듈의 작동 여부를 결정하는 제어 모듈을 포함하고,
상기 제1전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-1전극 모듈과 제1-2전극 모듈을 포함하는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 출력 모듈은 트랜스듀서이고, 상기 출력 모듈의 초음파는 상기 수직 방향의 축을 기준으로 포커싱되어, 상기 생체 조직의 내부에 집속되는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 제어 모듈은 상기 제1-1전극 모듈과 상기 제1-2전극 모듈 모두에서 전기 신호가 발생하는 경우에 상기 출력 모듈을 작동시키는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 전극 모듈은 상기 수직 방향의 축을 기준으로 상호 대칭으로 배치되는 제1-3전극 모듈과 제1-4전극 모듈을 더 포함하고,
상기 제1-1전극 모듈과 상기 제1-2전극 모듈은 상기 수직 방향과 수직한 가상의 제1대각선 상에 배치되고,
상기 제1-3전극 모듈과 상기 제1-4전극 모듈은 상기 수직 방향과 수직한 가상의 제2대각선 상에 배치되고,
상기 제1대각선과 상기 제2대각선은 상호 수직하게 배치되는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제4항에 있어서,
상기 제1-1전극 모듈과 상기 제1-2전극 모듈과 상기 제1-3전극 모듈과 상기 제1-4전극 모듈은 상기 수직 방향에서 동일한 위상에 위치하고, 상기 제1대각선과 상기 제2대각선의 교차점은 상기 수직 방향의 축에서 형성되는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 제어부는 상기 제1전극 모듈의 전기 신호로부터 생체 조직의 온도를 판단하고, 생체 조직의 온도에 따라 상기 출력 모듈의 출력량을 제어하는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 고강도 초음파 출력장치는 상기 핸드 피스의 하면에 배치되고, 상기 제1전극 모듈과 이격되어 배치되고, 상기 생체 조직의 표면과 접촉하여 전기 신호를 발생하는 제2전극 모듈을 더 포함하고,
상기 제어 모듈은 상기 제2전극 모듈의 전기 신호로부터 생체 조직의 온도를 판단하고, 생체 조직의 온도에 따라 상기 출력 모듈의 출력량을 제어하는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제7항에 있어서,
상기 제2전극 모듈은 상기 제1-1전극 모듈과 이웃하여 배치되는 제2-1전극 모듈과, 상기 제1-2전극 모듈과 이웃하여 배치되는 제2-2전극 모듈을 포함하는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제8항에 있어서,
상기 제1전극 모듈은 전원기와 전기적으로 연결되고, 상기 제2전극 모듈은 전류 측정기 및 전압 측정기 중 적어도 하나와 전기적으로 연결되는 것을 특징으로 하는 고강도 초음파 출력장치.
- 제1항에 있어서,
상기 제1-1전극 모듈과 상기 제1-2전극 모듈 각각은 모노 폴라 타입의 전극 모듈이거나 바이 폴라 타입의 전극 모듈이고,
상기 제1-1전극 모듈과 상기 제1-2전극 모듈 각각이 모노 폴라 타입의 전극 모듈인 경우, 일방에 인가된 전류는 타방에서 환류되는 것을 특징으로 하는 고강도 초음파 출력장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180167164A KR20200077862A (ko) | 2018-12-21 | 2018-12-21 | 고강도 초음파 출력장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180167164A KR20200077862A (ko) | 2018-12-21 | 2018-12-21 | 고강도 초음파 출력장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200077862A true KR20200077862A (ko) | 2020-07-01 |
Family
ID=71602072
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180167164A KR20200077862A (ko) | 2018-12-21 | 2018-12-21 | 고강도 초음파 출력장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200077862A (ko) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160139518A (ko) | 2015-05-28 | 2016-12-07 | 주식회사 하이로닉 | 고강도 집속 초음파를 이용한 미용 시술 방법 |
-
2018
- 2018-12-21 KR KR1020180167164A patent/KR20200077862A/ko not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160139518A (ko) | 2015-05-28 | 2016-12-07 | 주식회사 하이로닉 | 고강도 집속 초음파를 이용한 미용 시술 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3579775B1 (en) | Profile parameter selection algorithm for electroporation | |
| US11213339B2 (en) | Spinal tissue ablation apparatus, system, and method | |
| US20210162210A1 (en) | Using reversible electroporation on cardiac tissue | |
| AU2008201500B2 (en) | Controller for flexible tissue ablation procedures | |
| US8388615B2 (en) | Electrosurgical device with controllable electric field profile | |
| EP1943973A1 (en) | Ablation system, clamp and method of use | |
| US9486625B2 (en) | Method for treating benign prostate hyperplasia | |
| AU2011202594B2 (en) | Apparatus and method for optimal tissue separation | |
| US8965527B2 (en) | Method and apparatus for treating cancer | |
| JP2018515247A (ja) | Ac型心臓不可逆的電気穿孔法のための非対称形にバランスされた波形 | |
| US20130012937A1 (en) | Device and method for radio frequency ablation (rfa) | |
| AU2007221764A1 (en) | Transformer for RF voltage sensing | |
| AU2012201623A1 (en) | Isolated current sensor | |
| JP2021530272A (ja) | アブレーション処置中にプローブ毎の利用可能な電力を調節するためのシステム及び方法 | |
| JP2022037870A (ja) | 正弦波発生器を使用するire及びrfアブレーションのブレンド | |
| WO2023078338A1 (zh) | 消融系统 | |
| KR102169093B1 (ko) | 고강도 초음파 출력장치 | |
| KR20200077862A (ko) | 고강도 초음파 출력장치 | |
| KR20210081084A (ko) | 고강도 초음파 출력장치 | |
| US20220133403A1 (en) | Systems and methods for ablation using non-adjacent bipoles | |
| CN116096318A (zh) | 在手术期间引起平滑肌响应的系统和方法 | |
| US20240032996A1 (en) | Grouped pin receptacle connector for ablation catheter handle | |
| CN116058954A (zh) | 一种脉冲消融系统 | |
| CN117838292A (zh) | 一种消融导管及消融系统 | |
| EP2741663A1 (en) | Method and apparatus for treating cancer |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| N231 | Notification of change of applicant | ||
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal |