KR20200065116A - 차량 및 그 제어 방법 - Google Patents
차량 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20200065116A KR20200065116A KR1020180150272A KR20180150272A KR20200065116A KR 20200065116 A KR20200065116 A KR 20200065116A KR 1020180150272 A KR1020180150272 A KR 1020180150272A KR 20180150272 A KR20180150272 A KR 20180150272A KR 20200065116 A KR20200065116 A KR 20200065116A
- Authority
- KR
- South Korea
- Prior art keywords
- torque
- vehicle
- driver
- stage
- acceleration
- Prior art date
Links
Images









Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/16—Inhibiting or initiating shift during unfavourable conditions, e.g. preventing forward reverse shift at high vehicle speed, preventing engine over speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/076—Slope angle of the road
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/12—Limiting control by the driver depending on vehicle state, e.g. interlocking means for the control input for preventing unsafe operation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/141—Inputs being a function of torque or torque demand of rate of change of torque or torque demand
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/18—Inputs being a function of torque or torque demand dependent on the position of the accelerator pedal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/44—Inputs being a function of speed dependent on machine speed of the machine, e.g. the vehicle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/02—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used
- F16H61/0202—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric
- F16H61/0204—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing characterised by the signals used the signals being electric for gearshift control, e.g. control functions for performing shifting or generation of shift signal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/38—Control of exclusively fluid gearing
- F16H61/40—Control of exclusively fluid gearing hydrostatic
- F16H61/46—Automatic regulation in accordance with output requirements
- F16H61/468—Automatic regulation in accordance with output requirements for achieving a target input torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/08—Electric propulsion units
- B60W2510/083—Torque
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/15—Road slope
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H2059/142—Inputs being a function of torque or torque demand of driving resistance calculated from weight, slope, or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/18—Inputs being a function of torque or torque demand dependent on the position of the accelerator pedal
- F16H2059/183—Rate of change of accelerator position, i.e. pedal or throttle change gradient
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed-, or reversing-gearings for conveying rotary motion
- F16H59/60—Inputs being a function of ambient conditions
- F16H59/66—Road conditions, e.g. slope, slippery
- F16H2059/663—Road slope
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/66—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing specially adapted for continuously variable gearings
- F16H2061/6604—Special control features generally applicable to continuously variable gearings
- F16H2061/6611—Control to achieve a particular driver perception, e.g. for generating a shift shock sensation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H63/00—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism
- F16H63/40—Control outputs from the control unit to change-speed- or reversing-gearings for conveying rotary motion or to other devices than the final output mechanism comprising signals other than signals for actuating the final output mechanisms
- F16H63/50—Signals to an engine or motor
- F16H2063/508—Signals to an engine or motor for limiting transmission input torque, e.g. to prevent damage of transmission parts
Abstract
본 발명의 차량은 SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량에 있어서, 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받는 입력부 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 제어부 및 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 구동부;를 포함한다.
Description
본 발명은 차량 및 그 제어 방법에 관한 것으로 더욱 상세하게는, 차량 변속 장치의 파킹 스프래그(Parking Sprag)의 보호가 가능한 차량 및 그 제어 방법에 관한 것이다.
차량은 차륜을 구동시켜 도로 위를 이동하는 기계이다.
이러한 차량은 휘발유, 경유와 같은 석유연료를 연소시켜 기계적인 동력을 발생시키고 이 기계적인 동력을 이용하여 주행하는 내연기관 차량(일반 엔진 차량)과, 연비 및 유해 가스 배출량을 줄이기 위해 전기를 동력으로 하여 주행하는 친환경 차량을 포함한다.
여기서 친환경 차량은 충전 가능한 전원부인 배터리와 모터를 포함하고 배터리에 축적된 전기로 모터를 회전시키고 모터의 회전을 이용하여 차륜을 구동시키는 전기 차량과, 엔진, 배터리 및 모터를 포함하고 엔진의 기계적인 동력과 모터의 전기적인 동력을 제어하여 주행하는 하이브리드 차량, 수소 연료 전지 차량을 포함한다.
하이브리드 차량은 모터의 동력만을 이용하는 EV(Electric Vehicle) 모드로 주행하거나, 엔진의 동력과 모터의 동력을 이용하는 HEV(Hybrid Electric Vehicle) 모드로 주행할 수 있으며, 제동 시나 관성에 의한 타력 운전(coasting) 시 제동 및 관성에너지를 모터의 발전동작을 통해 회수하여 배터리를 충전하는 회생 모드(Regenerative Braking)를 수행한다.
또한, 개선된 형태의 플러그인 하이브리드 차량이 개발되고 있다. 플러그인 하이브리드 차량(Plug-in Hybrid Electric Vehicle, PHEV)는 외부에서 충전한 배터리의 전기동력으로 주행하다가 배터리 방전 시 기존의 하이브리드 전기자동차처럼 내연기관 엔진과 배터리의 전기동력을 동시에 사용하여 운행하는 자동차이다.
이러한 친환경 차량과 별개로, 차량은 변속기를 포함하는데, 변속기란 엔진에 의해 발생된 동력을 차량의 주행 상태에 알맞도록 회전력과 속도를 바꾸어 구동 바퀴에 전달하는 장치로 수동 변속기와 자동 변속기로 구분될 수 있다.
차량을 운전하는 운전자는 운전석 주위의 콘솔면 또는 핸들에 장착된 변속 레버를 조작하여 수동 변속기 또는 자동 변속기의 변속단을 자신이 원하는 변속단으로 변경할 수 있다.
수동 변속기는 운전자가 변속레버를 이용하여 자동차의 주행 상태에 맞는 기어를 선택하면 케이블이나 로드 등을 통해 운전자가 원하는 움직임을 변속기에 전달하는 방식으로 작동되고, 자동 변속기는 운전자가 변속레버를 움직이면 케이블을 통해 인히비터 스위치를 구동시켜 운전자가 원하는 움직임을 변속기에 전달하는 방식으로 작동될 수 있다.
최근의 차량에는 SBW(Shift-by-Wire) 방식의 변속 레버가 사용되고 있다. SBW 방식의 변속 레버는 종래의 기계식 변속 레버와는 다르게, 다양한 방식의 조작 방법을 통해 변속 명령을 입력 받을 수 있다.
SBW 방식의 변속 레버가 적용된 차량의 경우 P단 입력 시 감속기 기어에 파킹 스프래그(Parking Sprag)가 맞물리면서 차량을 고정시키는 것이 일반적이다.
다만, 차량이 정차되지 않은 상태에서 운전자가 가속 페달을 동작시킨 경우에 파킹 스프래그에 충격이 가해져서 심한 경우 기구가 파손되는 문제점이 발생할 수 있다.
일 측면은 SBW 방식의 변속 레버 사용 차량의 파킹 스프래그의 파손을 미연에 방지하고자 한다.
일 측면에 따른 차량은, SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량에 있어서, 상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받는 입력부; 상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 제어부; 및 상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 구동부;를 포함할 수 있다.
또한, 상기 제어부는, 상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한할 수 있다.
또한, 상기 제어부는, 상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한할 수 있다.
또한, 상기 제어부는, 상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한할 수 있다.
또한, 상기 제어부는, 상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한할 수 있다.
또한, 상기 제어부는, 상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한할 수 있다.
또한, 상기 제어부는, 상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한할 수 있다.
또한, 상기 입력부는, 상기 차량의 속도를 더 입력받고, 상기 제어부는, 상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 상기 가속 토크를 산출할 수 있다.
또한, 상기 제어부는, 상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출할 수 있다.
또한, 상기 구동부는, 상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시킬 수 있다.
다른 일 측면에 따른 차량 제어 방법은, SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량의 차량 제어 방법에 있어서, 상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받고; 상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고; 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하고; 및 상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시킬 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은 상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한할 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은, 상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한할 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은, 상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한할 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은, 상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한할 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은, 상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한할 수 있다.
또한, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은, 상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한할 수 있다.
또한, 상기 차량의 속도를 더 입력 받고; 및 상기 가속 토크를 산출하는 것은,
상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 산출할 수 있다.
또한, 상기 구배 부하 토크를 산출하는 것은, 상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출할 수 있다.
또한, 상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시키는 것을; 더 포함할 수 있다.
본 발명은 SBW 방식의 변속 레버 사용 차량의 파킹 스프래그의 파손을 방지할 수 있다.
도 1은 일 실시 예에 따른 차량의 차체의 외장 예시도이다.
도 2는 일 실시 예에 따른 차량 제어 시스템을 탑재한 차량에 포함되는 각종 전자 장치를 나타낸 블록도이다.
도 3 및 도 4는 일 실시예에 따른 차량 제어 시스템의 블록도이다.
도 5은 일 실시 예에 따른 차량의 제어 방법을 나타낸 순서도이다.
도 6은 구배 부하 토크를 산출하는 방법을 설명하는 개략도이다.
도 7은 가속 토크를 산출 맵이다.
도 8 내지 도 10은 일 실시예에 따른 차량의 기어, 운전자 가속 페달 입력, 구배 부하 토크, 운전자 요구 토크 및 모터 토크 출력을 나타낸 그래프이다.
도 2는 일 실시 예에 따른 차량 제어 시스템을 탑재한 차량에 포함되는 각종 전자 장치를 나타낸 블록도이다.
도 3 및 도 4는 일 실시예에 따른 차량 제어 시스템의 블록도이다.
도 5은 일 실시 예에 따른 차량의 제어 방법을 나타낸 순서도이다.
도 6은 구배 부하 토크를 산출하는 방법을 설명하는 개략도이다.
도 7은 가속 토크를 산출 맵이다.
도 8 내지 도 10은 일 실시예에 따른 차량의 기어, 운전자 가속 페달 입력, 구배 부하 토크, 운전자 요구 토크 및 모터 토크 출력을 나타낸 그래프이다.
이하, 첨부된 도면을 참조하여 본 발명에 대해 상세히 설명한다.
도 1은 일 실시 예에 따른 차량의 차체의 외장 예시도이다.
일 실시 예의 차량(100)은 엔진, 배터리 및 모터를 포함하고 엔진의 기계적인 동력과 모터의 전기적인 동력을 제어하여 주행하는 플러그 인 하이브리드 차량(PHEV: Plugin Hybrid Electric Vehicle)이다. 다만, 본 발명에서는 반드시 친환경 차량에 제한되는 것은 아니며, 변속기가SBW(Shift-By-Wire)가 적용된 경우라면 차량 종류는 상관이 없다.
일 실시 예의 차량(100)은 외장(110)과 내장(120)을 갖는 차체(Body)와, 차체를 제외한 나머지 부분으로 주행에 필요한 기계 장치가 설치되는 차대(Chassis, 140)를 포함한다.
도 1 에 도시된 바와 같이 차체의 외장(110)은 프론트 패널(111), 본네트(112), 루프 패널(113), 리어 패널(114), 전후좌우의 도어(115) 및 전후좌우의 도어(115)에 개폐 가능하게 마련된 윈도우 글래스(116)를 포함한다.
그리고 차체의 외장은 전후좌우 도어의 윈도우 글래스 사이의 경계에 마련된 필러와, 운전자에게 차랑(100) 후방의 시야를 제공하는 사이드 미러와, 전방시야를 주시하면서 주변의 정보를 쉽게 볼 수 있도록 하고 다른 차량과 보행자에 대한 신호, 커뮤니케이션의 기능을 수행하는 램프(117)를 포함한다.
이러한 차량(100)은 도시되지는 않았으나, 차량 내부적으로, 차량의 현재 구동 모드인 전기차 모드(즉 EV모드), 하이브리드 전기차 모드(즉 HEV모드) 등을 표시할 수 있다.
도 2은 일 실시 예에 따른 차량 제어 시스템을 탑재한 차량에 포함되는 각종 전자 장치를 나타낸 블록도 이다.
본 발명은, 차량이D(Drive)단(주행 모드)에서 P(Parking)단(주차 모드)로 기어 변경된 경우 또는 R단 에서 P단으로 기어 변경되는 경우와 같이, 운전자가 차량을 정지 및 주차시키고자 하는 경우에 있어서의 차량 제어 방법을 설명하고자 한다.
따라서, 일 실시예에 따른 차량 제어 시스템(180)을 포함한 차량(100)은 도 1에 도시된 바와 같이, 다양한 전자 장치(1)를 포함할 수 있다.
구체적으로, 도 2에 도시된 바와 같이 차량(100)은 AVN (Audio/Video/Navigation) 장치(190), 입출력 제어 시스템(120), 엔진 제어 시스템(Engine Management System, EMS) (130), 변속 제어 시스템(Transmission Management System: TMS) (140), 제동 제어 장치(brake-by-wire) (150), 조향 제어 장치(steering-by-wire) (160), 운전 보조 시스템(170), 차량 제어 시스템(180), 페달 장치(195) 및 기타 차량 센서(200) 등을 포함할 수 있다.
다만, 도 2에 도시된 전자 장치(1)는 차량(100)에 포함된 전자 장치의 일부에 불과하며 차량(100)에는 더욱 다양한 전자 장치가 마련될 수 있다.
또한, 차량(100) 포함된 각종 전자 장치(1)는 차량 통신 네트워크(NT)를 통하여 서로 통신할 수 있다. 차량 통신 네트워크(NT)는 최대 24.5Mbps(Mega-bits per second)의 통신 속도를 갖는 모스트(MOST, Media Oriented Systems Transport), 최대 10Mbpas의 통신 속도를 갖는 플렉스레이(FlexRay), 125kbps(kilo-bits per second) 내지 1Mbps의 통신 속도를 갖는 캔(CAN, Controller Area Network), 20kbps의 통신 속도를 갖는 린(LIN, Local Interconnect Network) 등의 통신 규약을 채용할 수 있다. 이와 같은 차량 통신 네트워크(NT)는 모스트, 플레스레이, 캔, 린 등 단일의 통신 규약을 채용할 수 있을 뿐만 아니라, 복수의 통신 규약을 채용할 수도 있다.
AVN 장치(190)는 운전자의 제어 명령에 따라 음악 또는 영상을 출력하는 장치이다. 구체적으로, AVN 장치(110)는 운전자의 제어 명령에 따라 음악 또는 동영상을 재생하거나 내비게이션 시스템(미도시)으로부터 수신한 목적지까지의 경로를 안내할 수 있다.
입출력 제어 시스템(120)은 버튼을 통한 운전자의 제어 명령을 수신하고, 운전자의 제어 명령에 대응하는 정보를 표시한다. 입출력 제어 시스템(120)는 대시 보드에 마련되어 영상을 표시하는 클러스터 디스플레이, 영상을 윈드 스크린에 투영하는 헤드업 디스플레이 및 스티어링 휠에 설치되는 휠 버튼 모듈 등을 포함할 수 있다.
따라서, 일 실시예에 따른 입출력 제어 시스템(120)을 포함하는 차량(1)은 차량 제어 시스템(180)의 동작 상태를 운전자가 확인할 수 있도록 보여줄 수도 있다.
엔진 제어 시스템(130)는 연료분사 제어, 연비 피드백 제어, 희박 연소 제어, 점화 시기 제어 및 공회전수 제어 등을 수행한다. 이러한 엔진 제어 시스템(140)은 단일의 장치일 수 있을 뿐만 아니라, 통신을 통하여 연결된 복수의 장치들일 수도 있다.
변속 제어 시스템(140)는 변속점 제어, 댐퍼 클러치 제어, 마찰 클러치 온/오프 시의 압력 제어 및 변속 중 엔진 토크 제어 등을 수행한다. 이러한 변속 제어 시스템(140)은 단일의 장치일 수 있을 뿐만 아니라, 통신을 통하여 연결된 복수의 장치들일 수도 있다.
일 예로, 변속 제어 시스템(140) 내 마찰 클러치가 온(On)되면 제동 동력이 차단되도록 제어할 수 있으며, 마찰 클러치가 오프(Off)되면 제동 동력이 전달되도록 제어할 수 있다.
제동 제어 장치(150)는 차량(1)의 제동을 제어할 수 있으며, 대표적으로 안티락 브레이크 시스템(Anti-lock Brake System, ABS) 등을 포함할 수 있다.
조향 제어 장치(160)는 저속 주행 또는 주차 시에는 조향력을 감소시키고 고속 주행 시에는 조향력을 증가시킴으로써 운전자의 조향 조작을 보조한다.
조향 제어 장치(160)는 저속 주행 또는 주차 시에는 조향력을 감소시키고 고속 주행 시에는 조향력을 증가시킴으로써 운전자의 조향 조작을 보조한다.
운전 보조 시스템(170)은 차량(1)의 주행을 보조하며, 전방 충돌 회피 기능, 차선 이탈 경고 기능, 사각 지대 감시 기능, 후방 감시 기능 등을 수행할 수 있다.
이러한 운전 보조 시스템(170)은 통신을 통하여 연결된 복수의 장치들 포함할 수 있다. 예를 들어, 운전 보조 시스템(170)은 주행 차선의 전방에서 동일한 방향으로 주행 중인 자동차를 감지하여 전방 차량과의 충돌을 회피하기 위한 전방 충동 경고 장치(Forward Collision Warning System, FCW), 전방 차량과의 충돌이 불가피한 경우 충격을 완화시키는 자동 비상 제동 장치(Advanced Emergency Braking System, AEBS), 주행 차선의 전방에서 동일한 방향으로 주행 중인 차량을 감지하여 전방 차량의 속도에 따라 자동으로 가/감속하는 적응 크루즈 제어 장치 장치(Adaptive Cruise Control, ACC), 주행 차로를 벗어나는 것을 방지하는 차선 이탈 경고 장치(Lane Departure Warning System, LDWS), 주행 차로를 이탈하는 것으로 판단되면 본 차로로 복귀하도록 제어하는 차선 유지 보조 장치(Lane Keeping Assist System, LKAS), 사각지대에 위치한 차량의 정보를 운전자에게 제공하는 시각지대 감시 장치(Blind Spot Detection, BSD), 주행 차선의 후방에 동일한 방향으로 주행 중인 차량을 감지하여 후방 차량과의 충동을 회피하는 후방 충돌 경고 장치(Rear-end Collision Warning System, RCW) 등을 포함할 수 있다.
페달 장치(195)는 브레이크(Brake) 페달과 가속(Accelerator) 페달을 포함한다. 브레이크 페달(미도시)는 운전자가 제동을 하기 위하여 발로 조작하는 페달로, 마스터실린더의 피스톤을 밀어 유압이 발생되어 감속되도록 할 수 있다. 이 때, 운전자의 발로 브레이크 페달을 조작하는 답력을 답력 센서(미도시)로 측정하여 운전자의 제동의지를 판단할 수 있다.
가속(Accelerator) 페달 (미도시)는 운전자가 가속을 하기 위하여 발로 조작하는 페달로, 차량 내부의 기화기(카뷰레터)(미도시)와 연동된 기관이 가속 페달을 밟으면 회전이 빨라져 가속되도록 할 수 있다. 운전자의 발로 가속 페달을 조작하는 답력을 답력 센서로 측정하여 운전자의 가속 의지를 판단할 수 있다.
다음으로 일 실시예에 따른 차량 제어 시스템(180)은 후술하는 도 3 및 도 4에서 자세하게 설명한다.
다음으로, 기타 차량 센서(200)은 차량(1)에 포함되어 차량의 주행 정보를 감지하기 위하여 가속도 센서(201), 요레이트 센서(202), 조향각 센서(203) 및 속도 센서(204) 등을 포함할 수 있다.
가속도 센서(201)는 차량의 가속도를 측정하는 것으로, 횡 가속도 센서(미도시)와 종가속도 센서(미도시)를 포함할 수 있다. 요레이트 센서(202)는 차량의 각 휠에 설치될 수 있으며, 실시간으로 요레이트값을 검출할 수 있다. 조향각 센서(203)는 조향각을 측정한다. 스티어링 휠(60)의 하단부에 장착되며, 핸들의 조향 속도, 조향 방향 및 조향각을 검출할 수 있다. 속도 센서(204)는 차량의 휠의 안쪽에 설치되어 차량 바퀴의 회전 속도를 검출할 수 있다.다만, 기타 차량 센서(200)에 포함되는 차량의 상태를 센싱하는 각종 센서는 가속도 센서(201), 요레이트 센서(202), 조향각 센서(203) 및 속도 센서(204)에 한정되는 것은 아니며, 이 외에 다양한 센서가 더 포함될 수 있다.
이상에서는 차량(100)의 구성에 대하여 설명하였다.
이하에서는 차량(100)에 포함된 차량 제어 시스템(180)의 구성 및 동작에 대하여 설명한다.
구체적으로, 도 3은 차량 제어 시스템(180)의 하드웨어적 구성요소를 설명하기 위한 블록도이며, 도 4는 차량 제어 시스템(180)의 소프트웨어적 구성요소를 설명하기 위한 블록도이다.
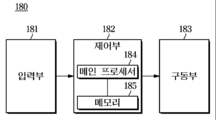
먼저, 도 3에 도시된 바와 같이, 일 실시예에 따른 차량 제어 시스템(180)은 차량에 포함된 각종 전자 장치(1) 에 포함된 각종 전장 장치로부터 동작 신호를 입력받는 입력부(181)와 입력부(181)의 입력 신호를 획득하여 저속 상황에서 운전자의 파킹 브레이크로의 기어 변경이 있는 경우에 파킹 스프래그 보호를 위한 추가 제어가 필요한 경우를 판단하는 제어부(182) 및 제어부(182)의 제어 신호에 따라 제동 제어를 수행하는 구동부(183)를 포함한다.
이 때, 제어부(182)는 하드웨어적으로 제어 신호를 산출하는 메인 프로세서(184)와 각종 제어 신호 및 제어 방법을 저장한 메모리(185)를 포함한다.
메인 프로세서(184)는 CPU 또는 MCU 일 수 있는 것으로 하나의 칩으로 또는 복수개의 칩으로 구현될 수도 있다.
또한, 메모리(185)는 메인 프로세서(184)와 메인 프로세서(184)의 동작에 필요한 각종 데이터를 저장할 수 있는 것으로, S램(S-RAM), D램(D-RAM) 등의 휘발성 메모리뿐만 아니라 플래시 메모리, 롬(Read Only Memory), 이피롬(Erasable Programmable Read Only Memory: EPROM), 이이피롬(Electrically Erasable Programmable Read OnlyMemory: EEPROM) 등의 비휘발성 메모리를 포함할 수 있다.
비휘발성 메모리는 차량 제어 시스템(180)의 동작을 제어하기 위한 제어 프로그램 및 제어 데이터를 반 영구적으로 저장할 수 있으며, 휘발성 메모리는 비휘발성 메모리로부터 제어 프로그램 및 제어 데이터를 불러와 임시로 기억하고, 각종 센서 정보 및 메인 프로세서에서 출력하는 각종 제어 신호를 임시로 저장할 수 있다.
이하, 일 실시예에 따른 차량 제어 시스템(180)의 입력부(181) 및 제어부(182), 구동부(183)의 동작을 제어하는 소프트웨어적 구성요소에 대하여 도 4를 통하여 설명한다.
먼저, 입력부(181)는 차량(100)에 포함된 각종 전장 장치(1)로부터 동작 신호를 입력 받는다. 예를 들어, 입력부 예를 들어, 입력부(181)는 속도 센서(204)로부터 차속을 입력 받는다. 뿐만 아니라, 입력부(181)는 클러치(205)의 온(engage)/오프(disengage)정보를 입력 받을 수 있다. 또한, 입력부(181)는 브레이크 압력 센서(206)로부터 각 휠의 제동 압력을 입력 받을 수 있다. 또한, 입력부(181)는 엔진 토크 센서(207)로부터 엔진 토크값을 입력받을 수 있다.
또한, 입력부(181)는 기어 레버(208)의 변속 정보를 획득할 수 있다. 따라서, 기어 레버(208)를 운전자가 D단에서 P 단으로, 또는 R 단에서 P 단으로 변경하였는지 여부에 대한 정보를 획득할 수 있다.
또한, 입력부(181)는 페달 장치(195)에 포함된 페달 센서(196)로부터 운전자가 가속 페달에 답력을 가하여 가속 의지가 있는지, 또는 브레이크 페달에 답력을 가하여 제동 의지가 있는지를 입력받는다.
뿐만 아니라, 도시되지는 않았으나, 입력부(181)는 차량(100)이 주행 중인 도로의 구배 정보를 센싱한 센싱 정보를 입력 받을 수도 있다.
다만, 이에 한정되는 것은 아니며, 차량(1)에 포함된 각종 전장 장치(1)의 동작 신호를 획득할 수 있다.
따라서, 제어부(182)는 입력부(181)에 입력된 각종 센서의 센서값 및 각종 전장 장치(1)의 동작 신호에 기초하여 차량(1)의 상태를 판단하여 파킹 스프라크 파손 방지를 위한 토크 제한이 필요한 경우인지를 판단하는 판단하는 판단부(186) 및 판단부(186)의 판단 결과에 따라 구동 제어부(187)가 구동 제어 신호를 생성할 수 있다.
이하에서는, 판단부(186)가 차량(1)의 기어 변경 상태에서 파킹 스프라그 파손 방지를 위한 토크 제한이 필요한 경우인지를 판단하는 방법에 대하여 자세히 설명한다.
구체적으로, 도 5는 일 실시예에 따른 차량 제어 시스템(180)에 있어서, 판단부(186)의 판단방법을 도시한 순서도이고, 도 6은 구배 부하 토크를 산출하는 방법을 설명하는 개략도 및 도 7은 가속 토크를 산출 맵이다. 즉, 판단부(186)는 차량이 주행중인 도로의 구배가 있어서 발생되는 구배 부하 토크와, 차량의 속도로부터 발생되는 가속 토크를 모두 고려하여, 운전자의 기어 변경 상태에서 파킹 스프라그 파손 방지를 위한 운전자 요구 토크 제한이 필요한 경우인지를 판단할 수 있다.
먼저, 판단부(186)는 입력부(181)로부터 입력된 신호로부터 가속 페달에 답력이 가해졌는지를 판단한다(500). 이 때, 가속 페달에 답력이 인가되고(500의 예), 운전자가 D 단 또는 R 단으로부터 P 단 요청하였는지 여부를 판단한다(510). 즉, 판단부(186)는 기어 레버(208)의 변속 정보로부터 운전자의 P 단 요청 정보를 획득할 수 있다.
만일 기어 레버(208)의 변속 정보가 D 단에서P단으로의 변경 요청이 있는 경우라면(520의 예), 530 내지 550의 단계를 거쳐 운전자 요구 토크를 제한할 수 있다.
이와 달리, 만일 기어 레버(208)의 변속 정보가 R 단에서 P단으로의 변경 요청이 있는 경우라면(560의 예), 570 내지 590의 단계를 거쳐 운전자 요구 토크를 제한할 수 있다.
따라서, 최종적으로, 차량 제어 시스템(180)은 제한된 운전자 요구토크가 '0'토크 보다 크게 되면 해당 제한된 운전자 요구토크값으로 최종 토크를 결정한다(600).
먼저, 기어 레버(208)의 변속 정보가 D 단에서 P단으로의 변경 요청이 발생한 경우에서의 제어부(182)의 운전자 요구 토크 제한 방법에 대하여 설명한다.
먼저, 제어부(182)는 구배 부하와 가속 토크를 연산한다(530). 이 때, 구배 부하 토크를 산출하는 방법은 도 6의 도면을 참고하여 [식 1]과 같이 산출될 수 있다.
[식 1]
구배 부하 토크= m* g* sin(θ) *r
단, m은 차량 하중을, g는 중력 가속도, θ는 경사각, 및 r은 타이어 동반경을 의미한다. 따라서, 제어부(182)는 상기 [식 1]에 기초하여 주행중인 차량(100)의 주행 도로에서 발생하는 구배 부하 토크를 산출할 수 있다.
또한, 제어부(182)는 가속 토크를 연산한다(530). 이 때, 가속 토크를 산출하는 방법은 도 7의 도면을 참고하여 산출될 수 있다. 구체적으로, 도 7에 도시된 바는 차속에 따른 가속 토크 맵인 것으로, 페달 센서(196)에 포함된 가속 페달 센서(Accelerator pedal sensor: APS)의 답입 백분율(Percentage)에 따라 차속별 가속 토크량이 달라지는 것을 확인할 수 있다.
따라서, 제어부(182)는 [식 1]에 기초하여 산출된 구배 부하 토크와 도 7의 토크 맵을 기초로 산출된 가속 토크의 최소값(A)을 산출한다(540). 따라서, 제어부(182)는 산출된 가속 토크의 최소값(A)과 0과 비교하여 큰 값으로 운전자 요구 토크를 제한할 수 있다. 즉, 운전자 요구 토크를 제한함에 따라 파킹 스프래그의 파손을 미연에 방지할 수 있다.
다만, 따라서, 제어부(182)는 산출된 가속 토크의 최소값(A)과 0과 비교하여 큰 값으로 최대값을 설정하였으나 반드시 특정 토크값이 0일 필요는 없으며, 필요에 따라 변경 가능한 특정 토크값으로 결정될 수 있다.
다음으로, 기어 레버(208)의 변속 정보가 R단에서 P단으로의 변경 요청이 발생한 경우에서의 제어부(182)의 운전자 요구 토크 제한 방법에 대하여 설명한다.
먼저, 제어부(182)는 구배 부하와 가속 토크를 연산한다(570). 이 때, 구배 부하 토크를 산출하는 방법은 도 6의 도면을 참고하여 [식 1]과 같이 산출될 수 있다.
또한, 제어부(182)는 가속 토크를 연산한다(570). 이 때, 가속 토크를 산출하는 방법은 도 7의 도면을 참고하여 산출될 수 있다.
따라서, 제어부(182)는 [식 1]에 기초하여 산출된 구배 부하 토크와 0을 비교하여 최소값 (B)을 산출한다(580). 다만, 반드시 특정 토크값이 0일 필요는 없으며, 필요에 따라 변경 가능한 특정 토크값으로 결정될 수 있다. 따라서, 제어부(182)는 산출된 최소값(B)와 산출된 가속 토크 중 최대값으로 운전자 요구 토크를 제한할 수 있다(590). 즉, 운전자 요구 토크를 제한함에 따라 파킹 스프래그의 파손을 미연에 방지할 수 있다.
즉, 제어부(182)는 구배 부하 토크를 고려하여 운전자 요구 토크를 제한할 수 있는 것으로, 이하 도 8 내지 도 10에서는 구배에 따른 운전자 요구 토크 제한 방법에 대하여 설명한다.
도 8에서는 차량이 D단에서 등판(climbing)하는 경우에서의 운전자 요구 토크를 제한하는 방법을 설명하는 도면이고, 도 9에서는 차량이 D단에서 평지에서 주행중인 경우에 운전자 요구 토크를 제한하는 방법을 설명하는 도면이며, 도 10은 차량이 R 단에서 강판(descending)하는 경우에서의 운전자 요구 토크를 제한하는 방법을 설명하는 도면이다.
도 8에 도시된 바와 같이, 차량이 D단에서 등판(Climbing)하는 경우에, D단 상태에서 P단 변경과 동시에 가속 페달이 입력되면, 가속토크와 구배 부하토크를 산출하여 최소값을 확보하고, 해당 최소값과 '0' 토크 중 최대값으로 운전자 요구 토크를 제한한다.
일 예로, 차량이 D단에서 등판하는 경우에, 가속토크가 1000Nm이고, 구배 부하 토크가200Nm 인 것으로 산출되면, 최소값(A)은 200Nm이고, 최소값(A)이 '0'토크보다 크므로, 200Nm가 최종 운전자 요구 토크로 제한된다.
즉, 차량이 D단에서 등판하는 경우, 제어부(182)는 구배 부하 토크 만큼 운전자 요구 토크를 제한하여 차량의 움직임을 방지한 이후에 P단 파킹 스프래그를 체결시킨다.
다만, 차량이 R단인 경우에 등판하는 경우라면, 제어부(182)는 가속 토크 만큼 운전자 요구 토크를 제한하여 차량의 움직임을 방지한 이후에 P단 파킹 스프래그를 체결시킨다.
구체적으로, 도 8에 도시된 바와 같이, t1[sec]에서 운전자가 가속 페달 입력, t2[sec]에 운전자가 기어 레버(208)를 D단에서 P단으로 변경한 경우에 ①그래프는 산출된 구배 부하 토크를 나타내며, ②그래프는 운전자의 요구 토크를 나타내며, ③그래프는 운전자 요구 토크를 제한하기 위한 출력 모터 토크를 나타낸 것이다.
즉, ③ 운전자 요구 토크는 차량이 D단에서 등판하는 경우, 제어부(182)가 구배 부하 토크로 출력 모터 토크를 제한하여, t3[sec]시점에서 운전자 요구 토크가 출력 모터 토크로 제한되면, 파킹 스프래그를 체결하여 P단으로 변경되는 것을 확인할 수 있다.
다음으로, 도 9는 차량이 D단인 경우에 평지 주행 중, 제어부(182)가 운전자 요구 토크를 제한하여 파킹 스프래그를 체결시키는 방법에 대하여 설명하는 개략도이다.
도 9에 도시된 바와 같이, 차량이 D단에서 평지 주행 중에, D단 상태에서 P단 변경과 동시에 가속 페달이 입력되면, 구배 부하 토크를 산출하여 '0' 토크와의 최소값을 확보하고, 해당 최소값과 가속 토크 중 최대값으로 운전자 요구 토크를 제한한다.
일 예로, D단 상태에서 P단 변속과 동시에 가속 페달이 동시에 입력된 경우에, 가속 토크가 1000Nm이고, 구배 부하 토크가 0Nm이면, 최소값(A)은 0Nm인 것으로, 최종 운전자 요구 토크 역시 0Nm로 제한된다.
이와 달리, 다른 일 예로, R단 상태에서 P 단 변속과 동시에 가속 페달이 동시에 입력된 경우라면, 구배 부하 토크가 0 Nm인 경우에 '0'토크와의 최소값(B)를 산출하여 산출된 '0'토크와 가속 토크가 (-1000) Nm 인 경우에 최대값인 0 Nm 로 최종 운전자 요구 토크를 제한할 수 있다.
구체적으로, 도 9에 도시된 바와 같이, t4[sec]에서 운전자가 가속 페달 입력, t5[sec]에 운전자가 기어 레버(208)를 D단에서 P단으로 변경한 경우에 ④그래프는 산출된 구배 부하 토크를 나타내며, ⑤그래프는 운전자의 요구 토크를 나타내며, ⑥그래프는 운전자 요구 토크를 제한하기 위한 출력 모터 토크를 나타낸 것이다.
즉, ④ 운전자 요구 토크는 차량이 D단에서 평지 주행 시, 제어부(182)가 구배 부하 토크로 출력 모터 토크를 제한하여, t6[sec]시점에서 운전자 요구 토크가 출력 모터 토크로 제한되면, 파킹 스프래그를 체결하여 P단으로 변경되는 것을 확인할 수 있다.
마지막으로, 도 10은 차량이 R단으로, 강판하는 경우에 있어서, 제어부(182)가 가속 토크를 제한하여 파킹 스프래그를 제한하여 파킹 스프래그를 체결시키는 방법에 대하여 설명하는 개략도이다.
도 10에 도시된 바와 같이, 차량이 R단에서 강판(Descending)하는 경우에, R단 상태에서 P단 변경과 동시에 가속 페달이 입력되면, 구배 부하토크와 '0'토크 중 최소값을 확보하고, 해당 최소값과 가속 토크 중 최대값으로 운전자 요구 토크를 제한한다.
즉, 기어 R단 상황에서 가속 페달 및 P단 동시에 입력되면 구배 부하 토크 만큼 운전자 토크를 제한하여 차량의 움직임을 방지할 수 있다.
일 예로, 차량이 R단에서 강판하는 경우에, 구배 부하 토크가 -200Nm 인것으로 산출되면, '0' 토크와의, 최소값(B)은 -200Nm이고, 최소값(B)가 산출된 가속 토크-1000Nm 보다 크므로, -200Nm가 최종 운전자 요구 토크로 제한된다.
구체적으로, 도 10에 도시된 바와 같이, t7[sec]에서 운전자가 가속 페달 입력, t8[sec]에 운전자가 기어 레버(208)를 R단에서 P단으로 변경한 경우에 ⑦그래프는 산출된 구배 부하 토크를 나타내며, ⑧그래프는 운전자의 요구 토크를 나타내며, ⑨그래프는 운전자 요구 토크를 제한하기 위한 출력 모터 토크를 나타낸 것이다.
즉, ⑨ 운전자 요구 토크는 차량이 R단에서 강판하는 경우, 제어부(182)가 구배 부하 토크로 출력 모터 토크를 제한하여, t9[sec]시점에서 운전자 요구 토크가 출력 모터 토크로 제한되면, 파킹 스프래그를 체결하여 P단으로 변경되는 것을 확인할 수 있다.
이상에서와 같이 첨부된 도면을 참조하여 개시된 실시예들을 설명하였다.본 발명이 속하는 기술분야에서 통상의 지식을 가진 자는 본 발명의 기술적 사상이나 필수적인 특징을 변경하지 않고도, 개시된 실시예들과 다른 형태로 본 발명이 실시될 수 있음을 이해할 것이다. 개시된 실시예들은 예시적인 것이며, 한정적으로 해석되어서는 안 된다.
100: 차량 1: 차량 전장 장치
141: 차륜180: 차량 제어 시스템
141: 차륜180: 차량 제어 시스템
Claims (20)
- SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량에 있어서,
상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받는 입력부;
상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고, 산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 제어부; 및
상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 구동부;를 포함하는 차량. - 제 1 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한하는 차량. - 제 1 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량. - 제 3 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한하는 차량. - 제 2 항에 있어서,
상기 제어부는,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량. - 제 1항에 있어서,
상기 입력부는,
상기 차량의 속도를 더 입력받고,
상기 제어부는,
상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 상기 가속 토크를 산출하는 차량. - 제 8 항에 있어서,
상기 제어부는,
상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출하는 차량. - 제 1 항에 있어서,
상기 구동부는,
상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시키는 차량. - SBW(Shift-by-Wire) 방식의 변속 레버가 사용되는 차량의 차량 제어 방법에 있어서,
상기 차량의 가속 페달 답력 및 상기 변속 레버의 P단으로의 변속 명령 및 주행 중인 도로의 구배 정보를 입력 받고;
상기 차량의 가속 페달 답력이 인가되고, 상기 P단으로의 변속 명령이 입력되면, 상기 차량의 구배 부하 토크, 가속 토크를 산출하고;
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하고; 및
상기 운전자 요구 토크가 제한되면 상기 변속 레버를 P단으로 변속시키는 차량 제어 방법. - 제 11 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력된 경우에 산출된 가속 토크와 구배 부하 토크의 최소값과 상기 최소값과 미리 설정한 특정 토크의 최대값으로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 11 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력된 경우에 산출된 구배 부하 토크와 미리 설정한 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 등판 중인 경우에, 상기 구배 부하 토크로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 D단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 13 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 강판 중인 경우에, 상기 산출된 구배 부하 토크로 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 12 항에 있어서,
산출된 구배 부하 토크 및 가속 토크를 기초로 운전자 요구 토크를 제한하는 것은,
상기 차량이 R단에서 P단으로의 변속 명령이 입력되고, 상기 차량이 평지 주행 중인 경우에, 상기 구배 부하 토크와 상기 미리 설정한 특정 토크의 최소값과 상기 최소값과 상기 산출된 가속 토크의 최대값으로 최종 모터 토크를 결정하고, 상기 최종 모터 토크로 상기 운전자 요구 토크를 제한하는 차량 제어 방법. - 제 11항에 있어서,
상기 차량의 속도를 더 입력 받고; 및
상기 가속 토크를 산출하는 것은,
상기 차량의 속도, 및 인가된 운전자의 가속 페달 답력에 기초하여 미리 설정된 맵에 기초하여 산출하는 차량 제어 방법. - 제 18 항에 있어서,
상기 구배 부하 토크를 산출하는 것은,
상기 차량의 하중, 중력 가속도, 및 상기 구배 정보를 기초로 구배 부하 토크를 산출하는 차량 제어 방법. - 제 11 항에 있어서,
상기 변속 레버를 P단으로 변속시키며, 상기 변속기의 파킹 스프래그(Sprag)를 체결시키는 것을; 더 포함하는 차량 제어 방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150272A KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
| US16/437,400 US10808837B2 (en) | 2018-11-29 | 2019-06-11 | Vehicle and method of controlling the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180150272A KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200065116A true KR20200065116A (ko) | 2020-06-09 |
| KR102553848B1 KR102553848B1 (ko) | 2023-07-13 |
Family
ID=70849676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180150272A KR102553848B1 (ko) | 2018-11-29 | 2018-11-29 | 차량 및 그 제어 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10808837B2 (ko) |
| KR (1) | KR102553848B1 (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210156885A (ko) * | 2020-06-17 | 2021-12-28 | 현대자동차주식회사 | Bbw 장치의 제어 시스템 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125128A (ja) * | 1997-10-22 | 1999-05-11 | Mitsubishi Motors Corp | エンジン制御装置 |
| JP2006175942A (ja) * | 2004-12-21 | 2006-07-06 | Toyota Motor Corp | 加減速度制御装置 |
| KR20150059327A (ko) * | 2013-11-22 | 2015-06-01 | 현대자동차주식회사 | 차량용 변속 제어방법 |
| JP2015196492A (ja) * | 2014-04-03 | 2015-11-09 | トヨタ自動車株式会社 | ハイブリッド車 |
| KR20160067453A (ko) * | 2014-12-04 | 2016-06-14 | 현대자동차주식회사 | 자동변속기 차량의 급출발 방지 장치 및 방법 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105518355B (zh) * | 2013-08-20 | 2017-09-05 | 株式会社斯巴鲁 | 换挡控制装置 |
| KR20170030962A (ko) * | 2015-09-10 | 2017-03-20 | 현대자동차주식회사 | 전기 자동차의 충격 완화 제어 방법 및 시스템 |
| JPWO2018051593A1 (ja) * | 2016-09-14 | 2019-04-25 | ジヤトコ株式会社 | 自動変速機及びその制御方法 |
| CN109642508B (zh) * | 2016-11-10 | 2021-08-17 | 加特可株式会社 | 车辆的控制装置及车辆的控制方法 |
| US10830351B2 (en) * | 2018-02-19 | 2020-11-10 | Ford Global Technologies, Llc | Method for disengaging hydraulic park |
| JP6717905B2 (ja) * | 2018-09-21 | 2020-07-08 | 株式会社Subaru | パーキングロック装置 |
-
2018
- 2018-11-29 KR KR1020180150272A patent/KR102553848B1/ko active IP Right Grant
-
2019
- 2019-06-11 US US16/437,400 patent/US10808837B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11125128A (ja) * | 1997-10-22 | 1999-05-11 | Mitsubishi Motors Corp | エンジン制御装置 |
| JP2006175942A (ja) * | 2004-12-21 | 2006-07-06 | Toyota Motor Corp | 加減速度制御装置 |
| KR20150059327A (ko) * | 2013-11-22 | 2015-06-01 | 현대자동차주식회사 | 차량용 변속 제어방법 |
| JP2015196492A (ja) * | 2014-04-03 | 2015-11-09 | トヨタ自動車株式会社 | ハイブリッド車 |
| KR20160067453A (ko) * | 2014-12-04 | 2016-06-14 | 현대자동차주식회사 | 자동변속기 차량의 급출발 방지 장치 및 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10808837B2 (en) | 2020-10-20 |
| US20200173548A1 (en) | 2020-06-04 |
| KR102553848B1 (ko) | 2023-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10556590B2 (en) | Vehicle and control method thereof | |
| US7983828B2 (en) | Automatic brake control device | |
| KR101490954B1 (ko) | 하이브리드 차량의 토크 저감 제어 방법 | |
| US9205843B2 (en) | Deceleration factor estimating device and drive assisting device | |
| US20190001963A1 (en) | Vehicle and method for controlling the same | |
| US20160288789A1 (en) | Adaptive cruise control system | |
| US20120330505A1 (en) | Vehicle control device | |
| US10487761B2 (en) | Vehicle control apparatus and vehicle control method | |
| JP2013533165A (ja) | 自動車用電子パーキングブレーキシステム、及びその補助始動方法 | |
| CN103043056A (zh) | 控制车轮轴扭矩的方法和用于其的控制系统 | |
| WO2016152749A1 (ja) | 走行制御装置、及び、走行制御方法 | |
| KR20200137061A (ko) | 차량의 크립 주행 제어 시스템 및 그 방법 | |
| US11952009B2 (en) | Driving force control system for vehicle | |
| KR102553848B1 (ko) | 차량 및 그 제어 방법 | |
| WO2013114626A1 (ja) | 減速因子推定装置 | |
| JP2007246023A (ja) | 車両の走行制御装置及び走行制御方法 | |
| KR101927183B1 (ko) | 차량용 모터 제어 장치 및 방법 | |
| US11383702B2 (en) | Vehicle and control method thereof | |
| US10343684B2 (en) | Systems and methods for smooth stopping of a vehicle | |
| CN112776806B (zh) | 车辆及其控制方法 | |
| KR102082431B1 (ko) | 차량 및 그 제어 방법 | |
| KR101664074B1 (ko) | 하이브리드 차량의 토크 저감 제어 장치 및 방법 | |
| JP7263946B2 (ja) | 車両 | |
| CN113276851A (zh) | 车辆控制方法、装置、控制器及车辆 | |
| CN109080623B (zh) | 混合动力汽车的雪地行驶控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |