KR20200060576A - 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 - Google Patents
수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 Download PDFInfo
- Publication number
- KR20200060576A KR20200060576A KR1020180144357A KR20180144357A KR20200060576A KR 20200060576 A KR20200060576 A KR 20200060576A KR 1020180144357 A KR1020180144357 A KR 1020180144357A KR 20180144357 A KR20180144357 A KR 20180144357A KR 20200060576 A KR20200060576 A KR 20200060576A
- Authority
- KR
- South Korea
- Prior art keywords
- engine idle
- idle speed
- vehicle
- gear
- manual transmission
- Prior art date
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/06—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of combustion engines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/10—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to vehicle motion
- B60W40/105—Speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0063—Manual parameter input, manual setting means, manual initialising or calibrating means
- B60W2050/0066—Manual parameter input, manual setting means, manual initialising or calibrating means using buttons or a keyboard connected to the on-board processor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2422/00—Indexing codes relating to the special location or mounting of sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2510/00—Input parameters relating to a particular sub-units
- B60W2510/10—Change speed gearings
- B60W2510/1005—Transmission ratio engaged
- B60W2510/101—Transmission neutral state
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/06—Combustion engines, Gas turbines
- B60W2710/0644—Engine speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/30—Sensors
- B60Y2400/303—Speed sensors
Abstract
본 발명은 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법에 관한 것으로, 본 발명은 일 실시예로 운전자의 조작에 의해 온/오프(On/Off)되는 버튼부; 차량의 주행 속도를 파악하는 차속 센서; 기어가 중립 상태인지 확인하는 기어 중립 상태 확인부; 및 상기 버튼부의 온/오프 상태, 기어 중립 여부, 차량의 주행 속도를 토대로 차량의 목표 기어 단수를 설정하고, 상기 목표 기어 단수에 맞게 엔진 아이들 회전수를 제어하는 제어부;를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템을 제공함으로써, 수동 변속기 차량에서 타력 주행 중 변속이 필요한 상황에서 운전자의 기어 재결합을 위한 클러치 조작을 생략할 수 있도록 할 수 있으므로, 결과적으로 운전자의 편의성을 향상시킬 수 있다.
Description
본 발명은 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법에 관한 것으로, 보다 구체적으로는 수동 변속기 차량에서 기어 중립 상태의 타력 주행이 이루어질 때, 엔진 아이들 회전수(RPM)를 제어하여 운전자의 기어 재결합을 위한 클러치 조작을 생략할 수 있도록 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법에 관한 것이다.
타력 주행은 동력 차량이 구동력을 출력하지 않고 주행해 온 타력에 의해 계속해서 운전하는 것을 의미하며, 운전자는 차량 주행 시 기어를 중립(Neutral) 모드로 전환함으로써 타력 주행을 할 수 있다.
특히, 고속 주행 중에 기어를 중립 모드로 전환하여 엔진 회전수를 아이들 상태 수준까지 떨어뜨리거나, 내리막길과 같은 곳에서 기어를 중립 모드로 전환하는 경우에는 엔진 제어에서 일반적으로 수행되는 퓨얼 컷-오프(Fuel cut-off) 상황보다도 더 높은 연비 절감 효과를 얻을 수 있으므로, 많은 운전자들이 연비 절감을 위하여 타력 주행을 수행하고 있다.
특히, 수동 변속기가 적용된 차량의 운전자들이 타력 주행을 수행하는 경우가 많은데, 상기 수동 변속기 차량은 차량 속도나 엔진 회전수에 따라 변속 비를 운전자가 스스로 바꿔야 하는 바, 변속 시에 클러치의 해제와 재결합이 필수적이라는 것이 특징이다.
이로 인해, 수동 변속기 차량에서 기어를 중립에 두어 타력 주행을 수행하다가 가속을 위해 기어를 체결해야 하는 경우가 발생하면 기어 체결을 위해 운전자의 클러치 조작이 필수적이어서 운전자가 지나치게 번거롭다는 문제가 있었으며, 기어가 체결된 이후에도 차량의 덜컹거림이 발생하여 운전자의 운전 편의를 확보하기 어렵다는 문제가 있었다.
즉, 수동 변속기 차량에서도 타력 주행을 수행하면 높은 연비 절감 효과를 얻을 수 있음에도, 종래의 수동 변속기 차량에서는 타력 주행 중 가속이 필요한 상황이 발생하면 운전자가 클러치를 조작하여 기어 단수를 변경해야만 한다는 불편함이 있어 타력 주행을 수행하지 않는 수동 변속기 차량 운전자도 많았는바, 수동 변속기 차량의 타력 주행 시에도 운전자의 편의를 확보할 수 있는 새로운 방안이 요구되는 실정이다.
본 발명은 수동 변속기 차량에서 기어 중립 상태의 타력 주행이 이루어질 때, 엔진 아이들 회전수를 제어하여 운전자의 기어 재결합을 위한 클러치 조작을 생략할 수 있도록 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법을 제공함으로써, 종래에 수동 변속기 차량 운전자가 겪었던 상기와 같은 불편함을 해소하고자 한다.
본 발명이 이루고자 하는 기술적 과제는 이상에서 언급한 기술적 과제로 제한되지 않으며 언급되지 않은 또 다른 기술적 과제들은 아래의 기재로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
상기의 과제를 해결하기 위하여, 본 발명은 일 실시예로 운전자의 조작에 의해 온/오프(On/Off)되는 버튼부; 차량의 주행 속도를 파악하는 차속 센서; 기어가 중립 상태인지 확인하는 기어 중립 상태 확인부; 및 상기 버튼부의 온/오프 상태, 기어 중립 여부, 차량의 주행 속도를 토대로 차량의 목표 기어 단수를 설정하고, 상기 목표 기어 단수에 맞게 엔진 아이들 회전수를 제어하는 제어부;를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템을 제공한다.
이 때, 상기 버튼부는 차량의 스티어링 휠 또는 기어 스틱에 위치하는 것을 특징으로 한다.
또한, 상기 제어부는 엔진 아이들 회전수 제어 조건이 충족되었는지 여부를 판단하는 조건 판단부; 상기 조건 판단부에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단된 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 목표 기어 단수 설정부; 및 상기 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 엔진 아이들 회전수 제어부;를 포함하는 것을 특징으로 한다.
아울러, 상기 제어부는 차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수를 운전자에게 알리는 알림부;를 더 포함할 수도 있다.
여기서, 상기 조건 판단부는 상기 버튼부가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 설정 값 이상인 경우에 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하는 것을 특징으로 한다.
또한, 상기 목표 기어 단수 설정부는 맵핑된 차량의 주행 속도 별 기어 단수 데이터를 토대로 목표 기어 단수를 설정하는 것을 특징으로 한다.
아울러, 상기 엔진 아이들 회전수 제어부는 상기 기어 중립 상태 확인부에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 것을 특징으로 한다.
본 발명은 상기의 과제를 해결하기 위한 또 다른 실시예로 버튼부 온/오프(On/Off) 상태, 차량의 주행 속도, 기어 중립 여부에 대한 데이터를 수집하는 데이터 수집 단계; 상기 데이터 수집 단계에서 수집된 데이터를 토대로 엔진 아이들 회전수 제어 조건이 충족되었는지 여부를 판단하는 제어 조건 판단 단계; 상기 제어 조건 판단 단계에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단되는 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 목표 기어 단수 설정 단계; 및 상기 목표 기어 단수 설정 단계에서 설정된 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 엔진 아이들 회전수 제어 단계;를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법을 제공한다.
또한, 본 발명의 또 다른 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 방법은 차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수를 운전자에게 알리는 요구 기어 단수 알림 단계;를 더 포함할 수도 있다.
이 때, 상기 제어 조건 판단 단계는 버튼부가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 설정 값 이상인 경우에 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하는 것을 특징으로 한다.
또한, 상기 목표 기어 단수 설정 단계는 맵핑된 차량의 주행 속도 별 기어 단수 데이터를 토대로 목표 기어 단수를 설정하는 것을 특징으로 한다.
특히, 상기 엔진 아이들 회전수 제어 단계는 기 저장된 타이어 동반경과 종감속 기어비, 상기 데이터 수집 단계에서 수집된 차량의 주행 속도 및 상기 목표 기어 단수 설정 단계에서 설정된 목표 기어 단수를 토대로 목표 엔진 아이들 회전수를 계산하는 것을 특징으로 한다.
아울러, 상기 엔진 아이들 회전수 제어 단계는 상기 데이터 수집 단계에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 것을 특징으로 한다.
본 발명은 수동 변속기 차량에서 기어 중립 상태의 타력 주행이 이루어질 때, 엔진 아이들 회전수를 제어하여 운전자의 기어 재결합을 위한 클러치 조작을 생략할 수 있도록 함으로써, 운전자의 편의성을 향상시킬 수 있다.
또한, 본 발명은 클러치 조작을 생략할 수 있도록 함으로써, 기어가 재 체결되는 과정에서 차량의 발생되는 덜컥거림을 방지할 수 있어, 수동 변속기 차량의 주행 성능을 향상시킬 수 있다.
아울러, 본 발명은 기어 중립 상태라고 하여 무조건적으로 엔진 아이들 회전수를 제어하는 것이 아니라, 운전자가 버튼부를 온(On) 상태로 유지하였을 때만 엔진 아이들 회전수를 제어함으로써, 기존 차량의 연비를 유지하면서 운전자의 편의성을 향상시킬 수 있다.
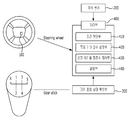
도 1은 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템의 개념도이다.
도 2는 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템의 엔진 아이들 회전수 제어 과정을 나타낸 흐름도이다.
도 3은 클러스터에 변속 요구 기어 단수를 표시함으로써, 운전자에게 변속 요구 기어 단수를 알리는 과정을 도시한 도면이다.
도 4는 본 발명의 또 다른 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 방법의 순서도이다.
도 2는 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템의 엔진 아이들 회전수 제어 과정을 나타낸 흐름도이다.
도 3은 클러스터에 변속 요구 기어 단수를 표시함으로써, 운전자에게 변속 요구 기어 단수를 알리는 과정을 도시한 도면이다.
도 4는 본 발명의 또 다른 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 방법의 순서도이다.
이하에서는 도면을 참조하여 본 발명을 보다 상세하게 설명한다. 도면들 중 동일한 구성요소들은 가능한 한 어느 곳에서든지 동일한 부호들로 나타내고 있음에 유의해야 한다. 또한, 본 발명의 요지를 불필요하게 흐릴 수 있는 공지 기능 및 구성에 대해 상세한 설명은 생략한다.
어떤 구성요소가 다른 구성요소에 연결되어 있거나 접속되어 있다고 언급될 때에는, 그 다른 구성요소에 직접적으로 연결 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 한다. 또한, 본 명세서 전체에서 어떤 부재가 다른 부재 "상에" 위치한다고 할 때, 이는 어떤 부재가 다른 부재에 접해 있는 경우뿐 아니라 두 부재 사이에 또 다른 부재가 존재하는 경우도 포함한다.
본 출원에서, “포함하다.” 또는 “가지다.” 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
먼저, 도 1 내지 도 3을 참조하여 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템에 대하여 구체적으로 살펴보도록 한다.
도 1은 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템의 개념도이고, 도 2는 본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템의 엔진 아이들 회전수 제어 과정을 나타낸 흐름도이며, 도 3은 클러스터에 변속 요구 기어 단수를 표시함으로써, 운전자에게 변속 요구 기어 단수를 알리는 과정을 도시한 도면이다.
본 발명의 일 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템은 운전자의 조작에 의해 온/오프(On/Off)되는 버튼부(100), 차량의 주행 속도를 파악하는 차속 센서(200), 기어가 중립 상태인지 확인하는 기어 중립 상태 확인부(300) 및 상기 버튼부의 온/오프 상태, 기어 중립 여부, 차량의 주행 속도를 토대로 차량의 목표 기어 단수를 설정하고, 상기 목표 기어 단수에 맞게 엔진 아이들 회전수를 제어하는 제어부(400)를 포함한다.
이 때, 본 발명의 버튼부(100)는 종래의 수동 변속기 차량에서는 찾아볼 수 없는 새로운 구성 요소로, 운전자의 조작에 따라 온/오프(On/Off)되어 엔진 아이들 회전수 제어의 수행 여부를 결정하는 역할을 한다.
특히, 상기 버튼부(100)는 운전자가 주행 중에 손쉽게 조작할 수 있도록 차량의 스티어링 휠(steering wheel) 또는 기어 스틱(Gear stick)에 위치하며, ⅰ) 운전자가 버튼부(100)를 조작하여 온(On) 상태가 되면, 후술할 엔진 아이들 회전수 제어 조건의 일부 조건이 충족되게 되어 본 발명의 엔진 아이들 회전수 제어 시스템은 엔진 아이들 회전수 제어를 수행하여 운전자가 타력 주행 후, 기어 체결 과정에서 클러치 조작을 생략할 수 있도록 할 수 있고, ⅱ) 반대로 운전자가 버튼부(100)를 조작하여 오프(Off) 상태가 되면 본 발명의 엔진 아이들 회전수 제어 시스템은 종래의 수동 변속기 차량과 마찬가지로 엔진 아이들 회전수 제어를 수행하지 않는다.
이 때, 운전자의 조작으로 버튼부(100)가 온(On) 상태가 된다고 하여, 본 발명의 엔진 아이들 회전수 제어 시스템이 무조건적으로 엔진 아이들 회전수 제어를 수행하는 것은 아니며, 본 발명의 엔진 아이들 회전수 제어 시스템은 기 설정된 다른 조건까지 모두 충족된 경우에만 엔진 아이들 회전수 제어를 수행한다. 다만, 다른 조건에 대한 구체적인 설명은 후술하도록 한다.
다음으로, 차속 센서(200)는 차량에 탑재되어 차량의 주행 속도를 측정하는 역할을 하며, 상기 차속 센서(200)에서 측정된 현재 차량의 주행 속도는 후술할 제어부(400)로 송신되어 엔진 아이들 회전수 제어에 활용될 수 있다.
이 때, 상기 차속 센서(200)는 기계식 또는 전자식 차속 센서여서 차량의 휠(바퀴) 속도에 대응되는 속도를 검출하는 것이 일반적이나, 대지(對地) 속도를 측정하는 레이저 또는 초음파식 차속 센서여서, 차량의 휠이 잠김(Lock)된 상태이거나, 슬립이 발생하는 경우에 발생할 수 있는 오차를 고려하여 차량의 주행 속도를 측정할 수도 있다.
다음으로, 상기 기어 중립 상태 확인부(300)는 변속기로부터 기어가 중립 위치에 있는지 확인하는 역할을 하며, 상기 기어 중립 상태 확인부(300)에서 확인된 차량의 기어 중립 상태 정보는 후술할 제어부(300)로 송신되어 엔진 아이들 회전수 제어에 활용될 수 있다.
이 때, 상기 기어 중립 상태 확인부(300)는 실시간으로 기어 중립 상태를 확인하고, 확인된 결과를 제어부(300)로 송신함으로써, 제어부(300)에서는 기어가 중립 상태를 유지하다가 중립이 아닌 상태(예를 들어, 1단, 2단)로 변경되는 경우에 이를 고려하여 엔진 아이들 회전수 제어를 수행할 수 있다.
마지막으로, 본 발명의 핵심적인 구성 요소인 제어부(400)에 대하여 살펴 보면, 상기 제어부(400)는 상기 버튼부(100)로부터 수신한 버튼부(100)의 온/오프 상태 정보, 상기 차속 센서(200)로부터 수신한 차량의 주행 속도 정보, 상기 기어 중립 상태 확인부(300)로부터 수신한 기어 중립 여부에 관한 정보를 토대로 차량의 목표 기어 단수를 설정하고, 상기 목표 기어 단수에 맞게 엔진 아이들 회전수를 제어함으로써, 수동 변속기 차량에서 타력 주행 중 가속을 위하여 기어 체결이 필요한 상황이 발생하는 경우에 운전자가 기어 체결을 위한 클러치 조작을 수행하지 않고도 기어 변속을 할 수 있도록 한다.
특히, 상기 제어부(400)는 조건 판단부(410), 목표 기어 단수 설정부(420), 엔진 아이들 회전수 제어부(430)를 포함하며, 상기 조건 판단부(410), 목표 기어 단수 설정부(420), 엔진 아이들 회전수 제어부(430)를 통해 엔진 아이들 회전수를 제어함으로써, 타력 주행 중 가속을 위한 기어 체결이 필요한 상황에서 클러치 조작 없이도 기어 변속을 가능케 할 수 있다.
이 때, 상기 조건 판단부(410)는 엔진 아이들 회전수 제어에 앞서, 현재 차량이 엔진 아이들 회전수 제어 조건을 충족하는지 여부를 판단하는 역할을 한다.
보다 구체적으로, 본 발명의 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템은 타력 주행 중 엔진 아이들 회전수를 제어하는 것을 목적으로 하므로, 상기 조건 판단부(410)는 현재 차량이 타력 주행 상황인지 확인하고자 기어 중립 상태와 차량이 주행 중인지 여부를 판단한다.
또한, 본 발명은 엔진 아이들 회전수 제어 수행 여부를 온/오프(On/Off)할 수 있는 버튼부(100)를 포함하므로, 상기 조건 판단부(410)에서는 ⅰ) 버튼부(100)가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 값 이상인 경우에 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하고, ⅱ) 반대로 버튼부(100)가 오프(Off) 상태이거나, 기어가 중립 상태가 아니거나, 차량의 주행 속도가 기 설정된 값보다 작은 경우에는 엔진 아이들 회전수 제어 조건이 충족되지 않은 것으로 판단한다.
즉, 본 발명의 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템은 상기와 같은 조건 판단부(410)의 엔진 아이들 회전수 제어 조건 판단 과정을 통해 운전자의 조작에 의해 버튼부(100)가 온(On) 상태가 되었다고 하여 무조건적으로 엔진 아이들 회전수를 제어하는 것이 아니라, 기어 중립 상태와 차량의 주행 속도가 기 설정된 값 이상인 조건까지 충족되는 경우에만 엔진 아이들 회전수를 제어한다.
이 때, 엔진 아이들 회전수 제어 조건 판단에 기준이 되는 상기 기 설정된 값은 시험에 의해 설정된 속도 값이며, 상기 기 설정된 값은 주행 환경, 적용 차량의 종류 등에 따라 가변될 수 있음은 당연하다.
다음으로, 목표 기어 단수 설정부(420)는 상기 조건 판단부(410)에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단된 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 역할을 한다.
이 때, 차량의 ECU 또는 TCU에는 차량의 주행 속도 별 기어 단수 데이터가 맵핑(Mapping)되어 있어, 상기 목표 기어 단수 설정부(420)는 상기 차속 센서(200)에서 측정된 차량의 주행 속도를 맵핑된 데이터와 비교하여 목표 기어 단수를 설정할 수 있다.
예를 들어, 차속 센서(200)에서 차량의 주행 속도가 40km/h인 것으로 측정되고, 맵핑된 차량의 주행 속도 별 기어 단수 데이터에는 주행 속도 40km/h에 대응되는 기어 단수가 2단인 것으로 저장되어 있는 경우, 상기 목표 기어 단수 설정부(420)는 목표 기어 단수를 2단으로 설정할 수 있다.
다음으로, 엔진 아이들 회전수 제어부(430)는 ⅰ) 상기 목표 기어 단수 설정부(420)에서 설정된 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, ⅱ) 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 역할을 한다.
구체적으로, 상기 엔진 아이들 회전수 제어부(430)는 ECU 또는 TCU에 기 저장된 타이어 동반경, 종감속 기어비 정보와 상기 차속 센서(200)에서 측정된 차량의 주행 속도 정보, 목표 기어 단수 설정부(420)에서 설정된 목표 기어 단수에 대응되는 목표 기어비를 토대로 하기 <수학식>과 같이 목표 엔진 아이들 회전수를 계산할 수 있다.
<수학식>
이 때, 상기 <수학식>의 C는 기 저장된 타이어 동반경, 종감속 기어비에 의해 결정되는 상수이며, 목표 기어비는 목표 기어 단수에 대응되는 기어비를 의미하고, 상기 C와 목표 기어비는 차량마다 달리 설정될 수 있음은 당연하다.
다만, 상기 엔진 아이들 회전수 제어부(430)는 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 제어하는 동안 상기 기어 중립 상태 확인부(300)에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 목표 엔진 아이들 회전수가 아닌 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하여 불필요한 엔진 아이들 회전수 제어를 방지함으로써, 기존의 연비를 유지할 수 있다.
또한, 상기 제어부(400)는 엔진 아이들 회전수 제어부(430)의 제어로 인해 차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수(요구 기어 단수)를 운전자에게 알리는 알림부(440)를 더 포함할 수 있다.
상기 알림부(440)는 도 3에 도시된 바와 같이 클러스터에 “O 단으로 변속하세요”라는 식의 문구를 나타내는 방식으로 운전자에게 요구 기어 단수를 알려, 운전자가 클러치 조작 없이 요구 기어 단수로 변속할 수 있도록 하는 것이 바람직하나 이에 한정되는 것은 아니며, 실시예에 따라 상기 알림부(440)는 소리를 이용하여 운전자에게 요구 기어 단수를 알릴 수도 있다.
다음으로 도 4를 참조하여 본 발명의 또 다른 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 방법에 대하여 살펴보도록 한다.
이 때, 도 4는 본 발명의 또 다른 실시예에 따른 수동 변속기 차량의 엔진 아이들 회전수 제어 방법의 순서도이며, 본 발명의 수동 변속기 차량의 엔진 아이들 회전수 제어 방법을 구성하는 각 단계에 대한 설명은 앞서 수동 변속기 차량의 엔진 아이들 회전수 제어 장치에 대해 설명한 것과 실질적으로 동일하므로, 이하에서는 중복되는 설명은 생략하도록 한다.
본 발명은 또 다른 실시예로 스티어링 휠 또는 기어 스틱에 형성된 버튼부 온/오프(On/Off) 상태, 차량의 주행 속도, 기어 중립 여부에 대한 데이터를 수집하는 데이터 수집 단계(S210), 상기 데이터 수집 단계(S210)에서 수집된 데이터를 토대로 엔진 아이들 회전수 제어 조건이 충족되었는지 여부를 판단하는 제어 조건 판단 단계(S220), 상기 제어 조건 판단 단계(S220)에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단되는 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 목표 기어 단수 설정 단계(S230) 및 상기 목표 기어 단수 설정 단계(S230)에서 설정된 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 엔진 아이들 회전수 제어 단계(S240)를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법(S200)을 제공한다.
이 때, 본 발명의 수동 변속기 차량의 엔진 아이들 회전수 제어 방법(S200)은 상기 엔진 아이들 회전수 제어 단계(S240)에서의 엔진 아이들 회전수 제어로 인하여 차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수를 운전자에게 알리는 요구 기어 단수 알림 단계(S250)를 더 포함할 수 있으며, 상기 요구 기어 단수 알림 단계(S250)는 클러스터에 요구 기어 단수를 표시하거나, 소리를 통해 알리는 방식으로 운전자에게 요구 기어 단수를 알림으로써, 운전자가 요구 기어 단수에 맞추어 변속하도록 할 수 있다.
또한, 본 발명의 상기 제어 조건 판단 단계(S220)는 ⅰ) 버튼부가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 설정 값 이상인 경우에는 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하나, ⅱ) 버튼부가 오프(Off) 상태이거나, 기어가 중립 상태가 아니거나, 차량의 주행 속도가 기 설정된 값보다 작은 경우에는 엔진 아이들 회전수 제어 조건이 충족되지 않은 것으로 판단하고, 목표 기어 단수 설정 단계(S230)와 엔진 아이들 회전수 제어 단계(S240)를 수행하지 않는다.
다음으로, 상기 목표 기어 단수 설정 단계(S230)는 상기 데이터 수집 단계(S210)에서 수집된 차량 주행 속도 데이터를 차량 ECU 또는 TCU에 맵핑된 차량의 주행 속도 별 기어 단수 데이터와 비교하여, 차량의 목표 기어 단수를 설정한다.
또한, 상기 엔진 아이들 회전수 제어 단계(S240)는 차량 ECU 또는 TCU에 기 저장된 타이어 동반경과 종감속 기어비, 상기 데이터 수집 단계(S210)에서 수집된 차량의 주행 속도 및 상기 목표 기어 단수 설정 단계(S230)에서 설정된 목표 기어 단수를 토대로 목표 엔진 아이들 회전수를 계산하며, 보다 구체적으로는 상기 <수학식>과 같이 기 저장된 타이어 동반경과 종감속 기어비에 대응되는 상수(C)를 계산하고, 계산된 상수를 차량 주행 속도, 목표 기어 단수에 대응되는 목표 기어비와 곱하여 목표 엔진 아이들 회전수를 계산할 수 있다.
상기 엔진 아이들 회전수 제어 단계(S240)는 상기와 같은 과정을 통해 목표 엔진 아이들 회전수가 계산되면, 계산된 목표 엔진 아이들 회전수를 토대로 엔진 회전수를 제어함으로써, 타력 주행 중 가속을 위한 기어 체결이 필요한 상황이 발생하더라도 종래의 수동 변속기 차량과 달리 운전자가 클러치를 조작하지 않고도 요구 기어 단수로 변속할 수 있도록 할 수 있다.
다만, 상기 엔진 아이들 회전수 제어 단계(S240)는 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 제어하는 동안 상기 데이터 수집 단계(S210)에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 목표 엔진 아이들 회전수가 아닌 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하여 불필요한 엔진 아이들 회전수 제어를 방지함으로써, 기존의 연비를 유지할 수 있다.
정리하면, 본 발명은 수동 변속기 차량에서 기어 중립 상태의 타력 주행이 이루어질 때, 엔진 아이들 회전수를 제어하여 운전자의 기어 재결합을 위한 클러치 조작을 생략할 수 있도록 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법을 제공함으로써, 운전자의 편의성을 향상시킬 수 있을 뿐만 아니라,
기어가 재 체결되는 과정에서 차량의 발생되는 덜컥거림을 방지할 수 있어, 수동 변속기 차량의 주행 성능을 향상시킬 수 있다.
이상에서는 본 발명의 바람직한 실시예 및 응용예에 대하여 도시하고 설명하였지만, 본 발명은 상술한 특정의 실시예 및 응용예에 한정되지 아니하며, 청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 다양한 변형 실시가 가능한 것은 물론이고, 이러한 변형 실시들은 본 발명의 기술적 사상이나 전망으로부터 개별적으로 이해되어져서는 안될 것이다.
또한, 본 발명에서 사용한 용어는 단지 특정한 실시 예를 설명하기 위해 사용된 것으로 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다.
본 발명의 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술사상은 본 발명의 권리범위에 포함되는 것으로 해석되어야 한다.
100 : 버튼부
200 : 차속 센서
300 : 기어 중립 상태 확인부
400 : 제어부
410 : 조건 판단부
420 : 목표 기어 단수 설정부
430 : 엔진 아이들 회전수 제어부
440 : 알림부
200 : 차속 센서
300 : 기어 중립 상태 확인부
400 : 제어부
410 : 조건 판단부
420 : 목표 기어 단수 설정부
430 : 엔진 아이들 회전수 제어부
440 : 알림부
Claims (13)
- 운전자의 조작에 의해 온/오프(On/Off)되는 버튼부;
차량의 주행 속도를 파악하는 차속 센서;
기어가 중립 상태인지 확인하는 기어 중립 상태 확인부; 및
상기 버튼부의 온/오프 상태, 기어 중립 여부, 차량의 주행 속도를 토대로 차량의 목표 기어 단수를 설정하고, 상기 목표 기어 단수에 맞게 엔진 아이들 회전수를 제어하는 제어부;
를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제1항에 있어서,
상기 버튼부는,
차량의 스티어링 휠 또는 기어 스틱에 위치하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제1항에 있어서,
상기 제어부는,
엔진 아이들 회전수 제어 조건이 충족되었는지 여부를 판단하는 조건 판단부;
상기 조건 판단부에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단된 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 목표 기어 단수 설정부; 및
상기 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 엔진 아이들 회전수 제어부;
를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제3항에 있어서,
상기 제어부는,
차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수를 운전자에게 알리는 알림부;를 더 포함하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제3항에 있어서,
상기 조건 판단부는,
상기 버튼부가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 설정 값 이상인 경우에 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제3항에 있어서,
상기 목표 기어 단수 설정부는,
맵핑된 차량의 주행 속도 별 기어 단수 데이터를 토대로 목표 기어 단수를 설정하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 제3항에 있어서,
상기 엔진 아이들 회전수 제어부는,
상기 기어 중립 상태 확인부에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템.
- 버튼부 온/오프(On/Off) 상태, 차량의 주행 속도, 기어 중립 여부에 대한 데이터를 수집하는 데이터 수집 단계;
상기 데이터 수집 단계에서 수집된 데이터를 토대로 엔진 아이들 회전수 제어 조건이 충족되었는지 여부를 판단하는 제어 조건 판단 단계;
상기 제어 조건 판단 단계에서 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단되는 경우, 차량의 주행 속도를 토대로 목표 기어 단수를 설정하는 목표 기어 단수 설정 단계; 및
상기 목표 기어 단수 설정 단계에서 설정된 목표 기어 단수에 대응되는 목표 엔진 아이들 회전수를 계산하고, 상기 계산된 목표 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 엔진 아이들 회전수 제어 단계;
를 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
- 제8항에 있어서,
차량의 엔진 회전수가 목표 엔진 아이들 회전수의 기 설정된 범위 내로 도달하면, 변속이 요구되는 기어 단수를 운전자에게 알리는 요구 기어 단수 알림 단계;를 더 포함하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
- 제8항에 있어서,
상기 제어 조건 판단 단계는,
버튼부가 온(On) 상태이고, 기어가 중립 상태이며, 차량의 주행 속도가 기 설정된 설정 값 이상인 경우에 엔진 아이들 회전수 제어 조건이 충족된 것으로 판단하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
- 제8항에 있어서,
상기 목표 기어 단수 설정 단계는,
맵핑된 차량의 주행 속도 별 기어 단수 데이터를 토대로 목표 기어 단수를 설정하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
- 제8항에 있어서,
상기 엔진 아이들 회전수 제어 단계는,
기 저장된 타이어 동반경과 종감속 기어비, 상기 데이터 수집 단계에서 수집된 차량의 주행 속도 및 상기 목표 기어 단수 설정 단계에서 설정된 목표 기어 단수를 토대로 목표 엔진 아이들 회전수를 계산하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
- 제8항에 있어서,
상기 엔진 아이들 회전수 제어 단계는,
상기 데이터 수집 단계에서 기어가 중립 상태를 벗어난 것으로 확인되는 경우, 기존의 엔진 아이들 회전수를 토대로 엔진 아이들 회전수를 조절하는 것을 특징으로 하는 수동 변속기 차량의 엔진 아이들 회전수 제어 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180144357A KR102142632B1 (ko) | 2018-11-21 | 2018-11-21 | 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180144357A KR102142632B1 (ko) | 2018-11-21 | 2018-11-21 | 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200060576A true KR20200060576A (ko) | 2020-06-01 |
| KR102142632B1 KR102142632B1 (ko) | 2020-08-10 |
Family
ID=71083295
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180144357A KR102142632B1 (ko) | 2018-11-21 | 2018-11-21 | 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102142632B1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112158203A (zh) * | 2020-10-16 | 2021-01-01 | 中国第一汽车股份有限公司 | 一种故障诊断方法、装置、设备及存储介质 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0610030U (ja) * | 1992-07-16 | 1994-02-08 | 日本電子機器株式会社 | 車両用表示装置 |
| JPH1054261A (ja) * | 1996-04-30 | 1998-02-24 | Eaton Corp | 車両用変速装置及びその制御装置とシステムコントローラ |
| KR20010003846A (ko) * | 1999-06-25 | 2001-01-15 | 정동학 | 상단 변속의 엔진 회전수 보상장치 및 방법 |
| JP2008302821A (ja) * | 2007-06-07 | 2008-12-18 | Nissan Motor Co Ltd | シフト位置検出装置 |
| JP2011219087A (ja) * | 2010-04-07 | 2011-11-04 | Robert Bosch Gmbh | 車両の作動方法 |
| KR101628526B1 (ko) | 2014-11-13 | 2016-06-08 | 현대자동차주식회사 | 변속시 차량 제어 방법 |
-
2018
- 2018-11-21 KR KR1020180144357A patent/KR102142632B1/ko active IP Right Grant
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0610030U (ja) * | 1992-07-16 | 1994-02-08 | 日本電子機器株式会社 | 車両用表示装置 |
| JPH1054261A (ja) * | 1996-04-30 | 1998-02-24 | Eaton Corp | 車両用変速装置及びその制御装置とシステムコントローラ |
| KR20010003846A (ko) * | 1999-06-25 | 2001-01-15 | 정동학 | 상단 변속의 엔진 회전수 보상장치 및 방법 |
| JP2008302821A (ja) * | 2007-06-07 | 2008-12-18 | Nissan Motor Co Ltd | シフト位置検出装置 |
| JP2011219087A (ja) * | 2010-04-07 | 2011-11-04 | Robert Bosch Gmbh | 車両の作動方法 |
| KR101628526B1 (ko) | 2014-11-13 | 2016-06-08 | 현대자동차주식회사 | 변속시 차량 제어 방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112158203A (zh) * | 2020-10-16 | 2021-01-01 | 中国第一汽车股份有限公司 | 一种故障诊断方法、装置、设备及存储介质 |
| CN112158203B (zh) * | 2020-10-16 | 2021-12-10 | 中国第一汽车股份有限公司 | 一种故障诊断方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102142632B1 (ko) | 2020-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8037870B2 (en) | Fuel economy improvement assist device and method of fuel economy improvement assist | |
| US9046044B2 (en) | Vehicle control apparatus for controlling the output reduction of a power source | |
| US9181885B2 (en) | Method for controlling the locomotion of a motor vehicle | |
| US8095286B2 (en) | Method for controlling shifts in an automated gearshift transmission | |
| US20110224878A1 (en) | Shift control apparatus of automatic transmission | |
| US8527160B2 (en) | Control system and method for automatic selection of a low range gear ratio for a vehicle drivetrain | |
| US8210985B2 (en) | Vehicular power transmission control apparatus | |
| US9810320B2 (en) | Vehicle control system | |
| US20120029781A1 (en) | Low range drive ratio transfer changeover anti-rollback system and method | |
| JP2014084018A (ja) | 車両制御装置 | |
| GB2471997A (en) | Automatic transmission control | |
| US9290175B2 (en) | Vehicle control system | |
| EP3725624B1 (en) | Hybrid vehicle control method and hybrid vehicle control device | |
| US20130006490A1 (en) | Drive control device for vehicle | |
| KR20200060576A (ko) | 수동 변속기 차량의 엔진 아이들 회전수 제어 시스템 및 방법 | |
| EP3576998B1 (en) | Method for controlling a vehicle, computer program, computer readable medium and vehicle | |
| US10036470B2 (en) | Continuously variable transmission (CVT) ratio control | |
| CN109084014B (zh) | 用于在下坡操作期间控制作业车辆的速度的系统和方法 | |
| SE540521C2 (en) | A method and system for gear shifting in a hybrid powertrain | |
| JP2011214407A (ja) | 車両用パワートレーン制御装置 | |
| JP5045690B2 (ja) | 車載内燃機関の制御装置 | |
| US7458916B2 (en) | Control method and device for the propulsion motor unit of a motor vehicle driven by an internal combustion engine | |
| JP2010121696A (ja) | 無段変速機の制御装置 | |
| KR20070060567A (ko) | 자동차용 오토크루즈 컨트롤 시스템 | |
| JP6697286B2 (ja) | 車両の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E90F | Notification of reason for final refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |