KR20200055317A - 카메라 모듈의 액츄에이터 - Google Patents
카메라 모듈의 액츄에이터 Download PDFInfo
- Publication number
- KR20200055317A KR20200055317A KR1020180138843A KR20180138843A KR20200055317A KR 20200055317 A KR20200055317 A KR 20200055317A KR 1020180138843 A KR1020180138843 A KR 1020180138843A KR 20180138843 A KR20180138843 A KR 20180138843A KR 20200055317 A KR20200055317 A KR 20200055317A
- Authority
- KR
- South Korea
- Prior art keywords
- driving
- duty
- resistance
- wires
- camera module
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B5/04—Vertical adjustment of lens; Rising fronts
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- H04N5/23287—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/10—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification by relative axial movement of several lenses, e.g. of varifocal objective lens
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
- G03B17/02—Bodies
- G03B17/12—Bodies with means for supporting objectives, supplementary lenses, filters, masks, or turrets
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B3/00—Focusing arrangements of general interest for cameras, projectors or printers
- G03B3/10—Power-operated focusing
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B30/00—Camera modules comprising integrated lens units and imaging units, specially adapted for being embedded in other devices, e.g. mobile phones or vehicles
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1601—Constructional details related to the housing of computer displays, e.g. of CRT monitors, of flat displays
- G06F1/1605—Multimedia displays, e.g. with integrated or attached speakers, cameras, microphones
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1686—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated camera
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H04N5/2253—
-
- H04N5/2254—
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
- G03B2205/0015—Movement of one or more optical elements for control of motion blur by displacing one or more optical elements normal to the optical axis
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Hardware Design (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Optics & Photonics (AREA)
- Signal Processing (AREA)
- Lens Barrels (AREA)
- Studio Devices (AREA)
Abstract
본 발명의 일 실시예에 따른 카메라 모듈의 액츄에이터는, 렌즈 배럴을 광축에 수직한 방향으로 구동하는 복수의 구동 와이어; 상기 복수의 구동 와이어에 펄스 형태의 구동 신호를 제공하는 구동부; 상기 렌즈 배럴의 목표 위치 및 상기 렌즈 배럴의 현재 위치에 따라 제어 신호를 생성하여, 상기 구동부를 제어하는 제어부; 를 포함하고, 상기 제어부는, 상기 복수의 구동 와이어 각각의 저항 기울기를 비교하여, 상기 복수의 구동 와이어 간의 저항 편차를 산출할 수 있다.
Description
본 발명은 카메라 모듈의 액츄에이터에 관한 것이다.
최근에는 스마트폰을 비롯하여 태블릿 PC, 노트북 등의 휴대용 전자기기에 카메라가 기본적으로 채용되고 있으며, 모바일 단말용 카메라에는 자동 초점 기능, 손떨림 보정 기능 및 줌 기능 등을 부가되고 있다.
그러나, 다양한 기능을 구현하기 위하여 카메라 모듈의 구조가 복잡해지고, 크기가 증가하게 되어 결국 카메라 모듈이 탑재되는 휴대용 전자기기의 크기도 커지게 되는 문제가 있다.
스마트폰 카메라 시장의 성장에 따라 OIS 구동 방식과 더불어 오토포커싱 (AF), 광학 줌 (Optical zoom) 등 기존 일반 수동 카메라의 기능을 소형화하여 집적하려는 시도가 지속적으로 이루어지고 있고, 이에 따른 구조 다변화에 따라 기존 OIS 방식 외 다른 OIS 구동 방식에 대한 수요가 발생하고 있는 실정이다.
본 발명의 과제는 렌즈 배럴의 현재 위치를 정확히 검출할 수 있는 카메라 모듈의 액츄에이터를 제공하는 것이다.
본 발명의 일 실시예에 따른 카메라 모듈의 액츄에이터는, 렌즈 배럴을 광축에 수직한 방향으로 구동하는 복수의 구동 와이어; 상기 복수의 구동 와이어에 펄스 형태의 구동 신호를 제공하는 구동부; 상기 렌즈 배럴의 목표 위치 및 상기 렌즈 배럴의 현재 위치에 따라 제어 신호를 생성하여, 상기 구동부를 제어하는 제어부; 를 포함하고, 상기 제어부는, 상기 복수의 구동 와이어 각각의 저항 기울기를 비교하여, 상기 복수의 구동 와이어 간의 저항 편차를 산출할 수 있다.
본 발명의 일 실시예의 카메라 모듈의 액츄에이터에 따르면, 렌즈 배럴의 현재 위치를 정확히 검출할 수 있다.
도 1은 본 발명의 일 실시예에 따른 전자기기의 사시도이다.
도 2는 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 분해 사시도이다.
도 3은 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 결합 사시도이다.
도 4는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 상면도이다.
도 5는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 단면도이다.
도 6는 형상기억합금(SMA) 와이어의 온도에 따른 길이를 설명하기 위한 그래프이다.
도 7은 본 발명의 일 실시예에 따른 체결시 구동 와이어의 사이각(θ)에 따른 구동 와이어의 신축시의 수직 방향의 힘(F)을 나타낸다.
도 8a, 도 8b, 도 8c, 및 도 8d는 본 발명의 일 실시예에 따른 OIS 구동 와이어의 체결 방법을 나타내는 도이다.
도 9는 본 발명의 일 실시예에 따른 카메라 모듈에 채용되는 액츄에이터의 블록도이다.
도 10은 본 발명의 일 실시예에 따른 구동 신호의 일 예를 나타낸다.
도 11은 본 발명의 다양한 실시예에 따른 디지털 변환 동작을 설명하기 위하여 제공되는 도이다.
도 12는 본 발명의 일 실시예에 따른 디더링 방식을 설명하기 위하여 제공되는 도이다.
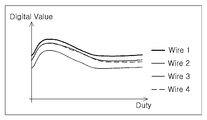
도 13은 본 발명의 일 실시예에 따른 구동 신호의 듀티에 따른 디지털 값의 그래프이다.
도 2는 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 분해 사시도이다.
도 3은 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 결합 사시도이다.
도 4는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 상면도이다.
도 5는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 단면도이다.
도 6는 형상기억합금(SMA) 와이어의 온도에 따른 길이를 설명하기 위한 그래프이다.
도 7은 본 발명의 일 실시예에 따른 체결시 구동 와이어의 사이각(θ)에 따른 구동 와이어의 신축시의 수직 방향의 힘(F)을 나타낸다.
도 8a, 도 8b, 도 8c, 및 도 8d는 본 발명의 일 실시예에 따른 OIS 구동 와이어의 체결 방법을 나타내는 도이다.
도 9는 본 발명의 일 실시예에 따른 카메라 모듈에 채용되는 액츄에이터의 블록도이다.
도 10은 본 발명의 일 실시예에 따른 구동 신호의 일 예를 나타낸다.
도 11은 본 발명의 다양한 실시예에 따른 디지털 변환 동작을 설명하기 위하여 제공되는 도이다.
도 12는 본 발명의 일 실시예에 따른 디더링 방식을 설명하기 위하여 제공되는 도이다.
도 13은 본 발명의 일 실시예에 따른 구동 신호의 듀티에 따른 디지털 값의 그래프이다.
후술하는 본 발명에 대한 상세한 설명은, 본 발명이 실시될 수 있는 특정 실시예를 예시로서 도시하는 첨부 도면을 참조한다. 이들 실시예는 당업자가 본 발명을 실시할 수 있기에 충분하도록 상세히 설명된다. 본 발명의 다양한 실시예는 서로 다르지만 상호 배타적일 필요는 없음이 이해되어야 한다. 예를 들어, 여기에 기재되어 있는 특정 형상, 구조 및 특성은 일 실시예에 관련하여 본 발명의 정신 및 범위를 벗어나지 않으면서 다른 실시예로 구현될 수 있다. 또한, 각각의 개시된 실시예 내의 개별 구성요소의 위치 또는 배치는 본 발명의 정신 및 범위를 벗어나지 않으면서 변경될 수 있음이 이해되어야 한다. 따라서, 후술하는 상세한 설명은 한정적인 의미로서 취하려는 것이 아니며, 본 발명의 범위는, 적절하게 설명된다면, 그 청구항들이 주장하는 것과 균등한 모든 범위와 더불어 첨부된 청구항에 의해서만 한정된다. 도면에서 유사한 참조부호는 여러 측면에 걸쳐서 동일하거나 유사한 기능을 지칭한다.
이하에서는, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 본 발명을 용이하게 실시할 수 있도록 하기 위하여, 본 발명의 실시예들에 관하여 첨부된 도면을 참조하여 상세히 설명하기로 한다.
도 1은 본 발명의 일 실시예에 따른 전자기기의 사시도이다.
도 1을 참조하면, 본 발명의 일 실시예에 따른 전자기기(1)는 이동 통신 단말기, 스마트 폰, 및 태블릿 PC 등의 모바일 전자기기를 포함할 수 있다. 휴대용 전자기기(1)는 피사체를 촬영하는 카메라 모듈(10)을 포함한다.
카메라 모듈(10)에는 자동 초점 조절(AF: Auto Focusing) 기능 및 광학식 흔들림 보정(OIS: Optical Image Stabilization) 기능 중 적어도 하나가 적용되어, 고화질의 이미지 신호를 전자기기(1)에 제공할 수 있다.
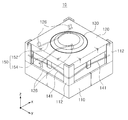
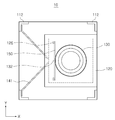
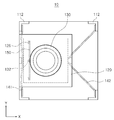
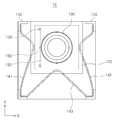
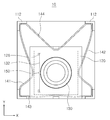
도 2는 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 분해 사시도이고, 도 3은 본 발명의 일 실시예에 따른 카메라 모듈을 나타내는 결합 사시도이고, 도 4는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 상면도이고, 도 5는 본 발명의 일 실시예에 따른 카메라 모듈의 주요부의 단면도이다.
도 2 내지 도 4를 참조하면, 본 발명의 일 실시예에 따른 카메라 모듈(10)은 하우징(110), 프레임(120), 렌즈 배럴(130), OIS 구동 와이어(140), AF 구동 와이어(150), 및 케이스(160)를 포함할 수 있다.
하우징(110)은 프레임(120)을 완전히 또는 부분적으로 수용하는 형태로 형성된다. 일 예로, 하우징(110)은 상면이 개방된 대략 육면체 형상을 가질 수 있고, 하우징(110)의 저면에는 이미지 센서를 위한 관통홀(111)이 형성된다. 하우징(110)의 모서리들에는 상부로 연장되는 제1 고정 커넥터(112)들이 마련되고, OIS 구동 와이어(140)의 양 단부는 제1 고정 커넥터(112)에 연결될 수 있다.
케이스(160)는 하우징(110)의 일 부분을 덮도록 구성된다. 일 예로, 케이스(160)는 하우징(110)의 상면 및 4개 측면을 덮도록 구성될 수 있다. 또한, 이와 달리, 케이스(160)는 하우징(110)의 4개 측면만을 덮도록 구성되거나, 케이스(160)는 하우징(110)의 상면 및 4개 측면을 부분적으로 덮도록 구성될 수 있다. 케이스(160)는 카메라 모듈의 구동 중에 발생되는 전자파를 차폐할 수 있다. 카메라 모듈은 구동시에 전자파가 발생되고, 전자파가 외부로 방출되는 경우에는 다른 전자부품에 영향을 미쳐 통신 장애나 오작동을 유발시킬 수 있다. 이를 방지하기 위해, 케이스(160)는 금속재질로 제공되어 하우징(110)의 하부에 장착되는 기판의 접지패드에 접지되어 전자파를 차폐할 수 있다.
프레임(120)은 하우징(110)의 내부 공간에서 이동 가능도록 하우징(110) 내부에 배치된다. 일 예로, 프레임(120)은 하우징(110)의 내부 공간에서 광축에 수직한 제1 방향(X축 방향) 및 제2 방향(Y축 방향)으로 이동한다. 프레임(120)은 대략 육면체 형상을 가질 수 있다. 프레임(120)의 네 개의 외측면에는 OIS 구동 와이어(140)가 체결되는 제1 장착구(122)가 마련된다. 제1 장착구(122)는 프레임(120)의 외측면의 중앙부에 배치될 수 있다. 제1 장착구(122)는 프레임(120)의 상단부에 배치되는 단차부(121)로부터 연장되어 형성될 수 있다.
프레임(120)의 내부면에는 렌즈 배럴(130)의 제2 장착구(132)가 삽입 배치되는 삽입 홈(124)이 형성될 수 있다. 삽입 홈(124)은 렌즈 배럴(130)과 프레임(120)의 결합시, 렌즈 배럴(130)의 제2 장착구(132)가 배치되는 공간을 제공한다.
프레임(120)의 네 개의 내측면 중 하나의 내측면에는 AF 구동 와이어(150)의 설치를 위한 제2 고정 커넥터(126)가 마련될 수 있다. 제2 고정 커넥터(126)는 삽입 홈(125)이 형성되는 내측면과 동일한 내측면에 마련될 수 있다. 프레임(120)의 상단부에 한 쌍의 제2 고정 커넥터(126)가 마련되고, 프레임(120)의 하단부에 한 쌍의 제2 고정 커넥터(126)가 마련될 수 있다.
렌즈 배럴(130)은 프레임(120)을 기준으로 광축 방향(Z축 방향)으로 이동 가능하도록 프레임(120)에 설치된다. 렌즈 배럴(130)의 일 측에는 복수의 제2 장착구(132)가 형성된다. 제2 장착구(132)는 광축 방향(Z축 방향)으로 2개가 상호 이격 배치될 수 있다. 제2 장착구(132)는 프레임(120)의 삽입 홈(124) 내에 삽입 배치된다.
렌즈 배럴(130)은 피사체를 촬상하는 적어도 하나의 렌즈가 내부에 수용될 수 있도록 중공의 원통 형상일 수 있으며, 렌즈는 광축을 따라 상기 렌즈 배럴(130)에 구비된다. 적어도 하나의 렌즈는 렌즈 배럴(130)의 설계에 따른 수만큼 적층되고, 각각 동일하거나 상이한 굴절률 등의 광학 특성을 가질 수 있다.
OIS 구동 와이어(140)는 형상 기억 합금으로 형성될 수 있다. 형상 기억 합금은 모상(母相)에서 형성된 합금이 다른 상에서 변형된 경우, 모상으로 되돌리면 형상도 원래로 되돌아가는 형상 기억 효과를 갖는 합금으로, 상술한 상(相)은 열, 즉 온도에 해당할 수 있다. 따라서, OIS 구동 와이어(140)는 전류가 흐를 때 발생하는 열로 인해 수축 및 팽창하여 변형될 수 있다. OIS 구동 와이어(140)는 후술할 액츄에이터의 일 구성요소에 해당할 수 있다.
OIS 구동 와이어(140)는 프레임(120)을 광축에 수직한 제1 방향(X축 방향)으로 이동시키기 위한 제1 구동 와이어(141), 및 제2 구동 와이어(142)와 프레임(120)을 광축에 수직한 제2 방향(Y축 방향)으로 이동시키기 위한 제3 구동 와이어(143), 및 제4 구동 와이어(144)를 포함할 수 있다.
한편, 제1 구동 와이어(141), 및 제2 구동 와이어(142)는 각각 프레임(120)의 외측면의 제1 장착구(122)에 체결되어, 상호 마주보도록 배치될 수 있으며, 제3 구동 와이어(143), 및 제4 구동 와이어(144)는 각각 프레임(120)의 외측면에 체결되어, 상호 마주보도록 배치될 수 있다.
제1 구동 와이어(141), 제2 구동 와이어(142), 제3 구동 와이어(143), 및 제4 구동 와이어(144) 각각은 양단부가 하우징(110)의 인접하는 모서리에서 연장되는 제1 고정 커넥터(112)에 설치되며, 중앙부가 프레임(120)의 제1 장착구(122)에 체결된다. OIS 구동 와이어(140)는 대략 V자 형상을 가지도록 하우징(110)과 프레임(120)에 설치된다.
프레임(120)을 X축 방향으로 이동시키기 위한 제1 구동 와이어(141), 및 제2 구동 와이어(142)와 프레임(120)을 Y축 방향으로 이동시키기 위한 제3 구동 와이어(143), 및 제4 구동 와이어(144)에 일정량의 전류를 제공하는 경우, 프레임(120)의 중심과 하우징(110)의 중심이 동일하게 배치될 수 있다.
제1 OIS 구동 와이어(141)에 제공되는 전류를 증가시켜 제1 OIS 구동 와이어(141)를 수축시키고, 제2 구동 와이어(142)에 제공되는 전류를 감소시켜 제2 구동 와이어(142)를 이완시키면 프레임(120)의 중심이 하우징(110)의 중심으로부터 좌측으로 이동된다. 이와 반대로, 제1 OIS 구동 와이어(141)에 제공되는 전류를 감소시켜 제1 OIS 구동 와이어(141)를 이완시키고, 제2 구동 와이어(142)에 제공되는 전류를 증가시켜 제2 구동 와이어(142)를 수축시키면 프레임(120)의 중심이 하우징(110)의 중심으로부터 우측으로 이동된다.
한편, 제1 구동 와이어(141), 및 제2 구동 와이어(142)를 신축시키는 방식과 동일하게 제3 구동 와이어(143), 및 제4 구동 와이어(144)에 공급되는 전류의 크기를 증감시켜 프레임(120)이 Y축 방향으로 이동할 수 있다.
AF 구동 와이어(140)는 형상 기억 합금으로 형성될 수 있다. AF 구동 와이어(150)는 렌즈 배럴(130)을 Z축 방향으로 이동시킬 수 있다. 일 예로, 프레임(120)의 네 개의 내측면 중 하나의 내측면에 AF 구동 와이어(150)가 배치될 수 있다. AF 구동 와이어(150)는 제1 AF 구동 와이어(152) 및, 제1 AF 구동 와이어(152)의 하부에 배치되는 제2 AF 구동 와이어(154)를 포함할 수 있다.
한편, AF 구동 와이어(150)는 양단부가 프레임(120)의 내측면에 마련되는 제2 고정 커넥터(126)에 설치되며, AF 구동 와이어(150)의 중앙부는 렌즈 배럴(130)의 제2 장착구(132)에 연결될 수 있다. AF 구동 와이어(150)는 대략 V자 형상을 가지도록 프레임(120)과 렌즈 배럴(130)에 설치된다.
제1 AF 구동 와이어(152), 및 제2 AF 구동 와이어(154)에 일정량의 전류를 제공하는 경우 렌즈 배럴(130)은 베이스 위치에 배치된다. 제1 AF 구동 와이어(152)에는 전류를 증가시켜 제1 AF 구동 와이어(152)를 수축시키고, 제2 AF 구동 와이어(154)에 전류를 감소시켜 제2 AF 구동 와이어(154)를 이완시키면 렌즈 배럴(130)은 상부로 이동된다. 이와 반대로, 제1 AF 구동 와이어(152)에는 전류를 감소시켜 제1 AF 구동 와이어(152)를 이완시키고, 제2 AF 구동 와이어(154)에 전류를 증가시켜 제2 AF 구동 와이어(154)를 수축시키면 렌즈 배럴(130)은 하부로 이동된다.
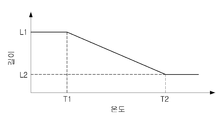
도 6는 형상기억합금(SMA) 와이어의 온도에 따른 길이를 설명하기 위한 그래프이다.
도 6를 참조하면, 형상 기억 합금으로 이루어지는 OIS 구동 와이어(140)는 온도가 증가함에 따라 길이가 짧아지는 특성을 가진다. 한편, 도 5의 T1과, T2는 실온(25℃)보다 크며, 형상기억합금(SMA) 와이어의 길이인 L1과 L2는 L1>L2인 관계를 만족한다. 이때, 형상기억합금(SMA) 와이어의 길이인 L1과 L2는 하기의 수학식 1을 만족한다.
[수학식 1]
L2 = 0.978×L1
도 4을 참조하면, 제1 고정 커넥터(112) 간의 거리를 d, OIS 구동 와이어(140)의 길이를 L, 하우징(110)의 내측면과 제1 장착구(122)의 내측면 간의 거리를 h라 가정하면, h는 하기의 수학식 2을 만족한다.
[수학식 2]
h = {(L/2)2 - (d/2)2}1/2
일 예로, 제1 고정 커넥터(112) 간의 거리를 d가 8.8mm이고, 상온에서의 OIS 구동 와이어(140)의 길이 L1가 9.08mm인 것으로 가정하면, OIS 구동 와이어(140)가 최대로 이완되어 있을 때, 거리 h가 최대값을 가지며, 최대 거리 hmax는 1.12mm 이다. 또한, OIS 구동 와이어(140)가 최대로 수축되어 있을 때, 거리 h가 최소값을 가지며, 최소 거리 hmin는 0.6mm 이다. 따라서, OIS 구동 와이어(140)의 수축, 및 이완을 통해, 프레임(120)은 X축 및 Y축 방향으로 최대 0.52mm의 스트로크(Stroke)(이동거리)를 가질 수 있다.
또한, 도 5을 참조하면, 제2 고정 커넥터(126) 간의 거리를 d, AF 구동 와이어(150)의 길이를 L, 제2 고정 커넥터(126)와 제2 장착구(132) 간의 거리를 h라 가정하고, 제2 고정 커넥터(126) 간의 거리를 d가 6.7mm이고, 상온에서의 AF 구동 와이어(150)의 길이 L1이 6.86mm인 것으로 가정하면, 최대 거리 hmax는 0.73mm이고, 최소 거리 hmin는 0.17mm 이다. 따라서, AF 구동 와이어(150)의 수축 및 이완을 통해, 렌즈 배럴(130)은 Z 축 방향으로 최대 0.56mm의 스트로크를 가질 수 있다.
본 발명의 일 실시예에 따르면, OIS 구동 와이어(140)와 AF 구동 와이어(150)를 통해 OIS 구동과 AF 구동을 수행하므로, 카메라 모듈(10)을 경량화할 수 있고, 제작 공정을 단순화하여, 공정시간 단축에 따른 제조비용을 절감시킬 수 있다.
한편, 카메라 모듈은 자동 초점 조절(AF: Auto Focusing) 기능 및 광학식 흔들림 보정(OIS: Optical Image Stabilization) 기능을 수행하기 위하여, OIS 구동 와이어(140)와 AF 구동 와이어(150)는 최대 스트로크 범위 내에서 프레임 및 렌즈 배럴을 구동할 수 있는 구동력을 확보할 필요가 있다. 다만, 프레임(120)이 중심에 위치할 시에, OIS 구동 와이어(140)가 하우징(110) 및 프레임(120)에 체결되는 경우, 최대 스트로크 범위 내에서 프레임을 구동할 수 없는 문제가 있다.
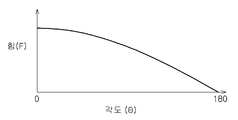
도 7은 본 발명의 일 실시예에 따른 체결시 구동 와이어의 사이각(θ)에 따른 구동 와이어의 신축시의 수직 방향의 힘(F)을 나타낸다.
구동 와이어는, 구동 와이어를 최대로 이완한 상태에서, 프레임 등에 체결된다. 다만, 도 7을 참조하면, 구동 와이어의 체결시, 구동 와이어 간의 사이각(θ)이 클 수록, 구동 와이어가 신축할 때의 수직 방향의 힘(F)은 작아지는 것을 알 수 있다.
일 예로, 도 4에서, 제1 구동 와이어(141)를 프레임(120)에 체결시, 프레임(120)이 중립에 위치하는 경우, 또는 프레임(120)이 하우징(110)의 좌측변에 위치하는 경우보다, 프레임(120)이 하우징(110)의 우측변에 위치하는 경우가 구동 와이어 간의 사이각(θ)이 작으므로, 제1 구동 와이어(141)가 신축할 때의 수직 방향 - 도 4의 (-)X축 방향 - 의 힘(F)을 증가시킬 수 있다.
따라서, OIS 구동 와이어(140)가 신축할 때의 최대 힘을 확보하기 위하여, 체결될 구동 와이어에 따라, 프레임의 위치를 제어할 필요가 있다.
도 8a, 도 8b, 도 8c, 및 도 8d는 본 발명의 일 실시예에 따른 OIS 구동 와이어의 체결 방법을 나타내는 도이다. 도 8a, 도 8b, 도 8c, 및 도 8d, 에서, 제1 구동 와이어(141), 제2 구동 와이어(142), 제3 구동 와이어(143), 및 제4 구동 와이어(144) 순서로 체결되는 것으로 가정한다.
다만, 제1 구동 와이어(141), 제2 구동 와이어(142), 제3 구동 와이어(143), 및 제4 구동 와이어(144)의 신축시의 최대 힘을 확보하기 위한 범위 내에서, 체결 순서는 다양한 방식으로 변경될 수 있다. 일 예로, 제2 구동 와이어(142), 제1 구동 와이어(141), 제4 구동 와이어(144), 및 제3 구동 와이어(143) 순서로 체결될 수 있음은 물론이다.
본 발명의 일 실시예에 따르면, 체결 대상이 되는 구동 와이어가 배치되는 내측면과 반대면에 프레임을 위치시킨 상태에서, 프레임과 구동 와이어가 체결될 수 있다. 이 때, 체결 대상이 되는 구동 와이어가 광축에 수직한 일 방향으로 구동력을 제공하는 경우, 프레임은 광축에 수직한 타 방향에서는 중심에 위치할 수 있다.
도 8a는 체결 대상에 해당하는 제1 구동 와이어(141)를 프레임(120)에 체결하는 방법을 설명하기 위하여 제공되는 도이다.
도 8a를 참조하면, 하우징(110)의 제1 내측면에 의해 형성되는 모서리에 제1 구동 와이어(141)의 양단부가 체결되고, 프레임(120)이 Y축 방향에서 중심에 위치하고, X축 방향으로 제2 내측면에 위치한 상태에서, 제1 구동 와이어(141)의 중앙부는, 대향하는 제1 장착구(122)에 체결된다.
도 8b는 체결 대상에 해당하는 제2 구동 와이어(142)를 프레임(120)에 체결하는 방법을 설명하기 위하여 제공되는 도이다.
도 8b를 참조하면, 하우징(110)의 제2 내측면에 의해 형성되는 모서리에 제2 구동 와이어(142)의 양단부가 체결되고, 프레임(120)이 Y축 방향에서 중심에 위치하고, X축 방향으로 제1 내측면에 위치한 상태에서, 제2 구동 와이어(142)의 중앙부는, 대향하는 제1 장착구(122)에 체결된다.
도 8c는 체결 대상에 해당하는 제3 구동 와이어(143)를 프레임(120)에 체결하는 방법을 설명하기 위하여 제공되는 도이다.
도 8c를 참조하면, 하우징(110)의 제3 내측면에 의해 형성되는 모서리에 제3 구동 와이어(143)의 양단부가 체결되고, 프레임(120)이 X축 방향에서 중심에 위치하고, Y축 방향으로 제4 내측면에 위치한 상태에서, 제3 구동 와이어(143)의 중앙부는, 대향하는 제1 장착구(122)에 체결된다.
도 8d는 체결 대상에 해당하는 제4 구동 와이어(144)를 프레임(120)에 체결하는 방법을 설명하기 위하여 제공되는 도이다.
도 8d를 참조하면, 하우징(110)의 제4 내측면에 의해 형성되는 모서리에 제4 구동 와이어(144)의 양단부가 체결되고, 프레임(120)이 X축 방향에서 중심에 위치하고, Y축 방향으로 제3 내측면에 위치한 상태에서, 제4 구동 와이어(144)의 중앙부는, 대향하는 제1 장착구(122)에 체결된다.
본 발명의 일 실시예에 따르면, 체결 대상이 되는 구동 와이어가 배치되는 내측면과 반대면에 프레임을 위치시킨 상태에서, 프레임과 구동 와이어를 체결함으로써, 구동 와이어가 신축할 때의 구동력을 최대로 확보할 수 있다.
도 9는 본 발명의 일 실시예에 따른 카메라 모듈에 채용되는 액츄에이터의 블록도이고, 도 10은 본 발명의 일 실시예에 따른 구동 신호의 일 예를 나타낸다.
도 9의 실시예에 따른 액츄에이터(20)는 도 2의 OIS 구동 와이어를 포함하여, 카메라 모듈의 광학식 흔들림 보정 기능을 수행할 수 있다.
본 발명의 일 실시예에 따른 액츄에이터(20)는 제어부(210), 구동부(220), OIS 구동 와이어(230), 및 디지털 변환부(240)를 포함할 수 있다. 이 때, 제어부(210), 구동부(220), 및 디지털 변환부(240)는 하나의 드라이버 IC(Driver IC: Driver Integrated Circuit) 내에 마련될 수 있다. OIS 구동 와이어(230)는 제1 내지 제4 구동 와이어(Wire1-Wire4)를 포함할 수 있고, 제1 내지 제4 구동 와이어(Wire1-Wire4)는 도 2의 제1 구동 와이어(141), 제2 구동 와이어(142), 제3 구동 와이어(143), 및 제4 구동 와이어(144)와 동일한 구성요소에 해당한다.
제어부(210)는 외부로부터 입력되는 자이로 신호(Sgy)와 피드백 신호(Sf)에 따라 제어 신호(Scon)를 생성하고, 생성된 제어 신호(Scon)를 구동부(220)로 제공할 수 있다.
자이로 신호(Sgy)는 카메라 모듈 또는 모바일 기기에 채용되는 자이로 센서로부터 제공될 수 있다. 자이로 신호(Sgy)에 의해 렌즈 배럴의 목표 위치가 결정될 수 있다. 자이로 신호(Sgy)는 자이로 센서에서 감지되는 카메라 모듈 또는 모바일 기기의 흔들림으로부터 생성될 수 있다.
제어 신호(Scon)는 OIS 구동 와이어(230)에 구비되는 제1 내지 제4 구동 와이어(Wire1-Wire4)의 채널 정보 및 렌즈 배럴의 목표 위치에 제1 내지 제4 구동 와이어(Wire1-Wire4) 각각의 전류 정보를 포함할 수 있다.
구동부(220)는 제어부(210)로부터 제공되는 제어 신호(Scon)에 따라 구동 신호(Sdr)를 생성하여 OIS 구동 와이어(230)에 제공될 수 있다. 구동부(220)는 제어 신호(Scon)의 채널 정보 및 전류 정보에 따라 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 구동 신호(Sdr)의 펄스 폭을 조절할 수 있다. 일 예로, 구동부(220)는 PWM(Pulse Width Modulation) 회로를 구비하여, 제어 신호(Scon)의 전류 정보에 따라 구동 신호(Sdr)의 펄스 폭을 조절하여, 제1 내지 제4 구동 와이어(Wire1-Wire4)를 구동할 수 있다. 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 구동 신호(Sdr)의 펄스 폭은 목표 위치에 따라 서로 다를 수 있다.
도 10을 참조하면, 구동부(220)는 제1 내지 제4 구동 와이어(Wire1-Wire4)에 구동 신호(Sdr)를 동시에 제공하여, 제1 내지 제4 구동 와이어(Wire1-Wire4)를 동시 구동할 수 있다. 다만, 실시예에 따라, 구동부(220)는 제1 내지 제4 구동 와이어(Wire1-Wire2)를 소정의 시간 동안 순차적으로 구동할 수 있다.
디지털 변환부(240)는 OIS 구동 와이어(230)의 아날로그 신호(Sa)를 디지털 신호로 변환하여 피드백 신호(Sf)를 생성하고, 생성된 피드백 신호(Sf)를 제어부(210)로 제공할 수 있다. OIS 구동 와이어(230)의 아날로그 신호(Sa)는 제1 내지 제4 구동 와이어(Wire1-Wire4)의 저항, 일 예로 열 저항에 해당할 수 있다. 디지털 변환부(240)는 OIS 구동 와이어(230)의 저항을 측정하여 렌즈 배럴 또는 렌즈 배럴과 함께 이동하는 프레임의 현재 위치를 판단할 수 있다.
디지털 변환부(240)는 아날로그 신호(Sa)를 디지털 신호로 변환하기 위한 아날로그 디지털 변환하는 아날로그-디지털 변환 회로를 포함하여, 디지털 변환 동작을 수행할 수 있다. 아날로그-디지털 변환 회로는 샘플 앤드 홀드(Sample & hold) 동작하여, 아날로그 신호(Sa)를 디지털 신호로 변환할 수 있다.
본 발명의 일 실시예에 따른 디지털 변환부(240)는, 시스템 자원의 효율성을 향상시키기 위하여 하나의 아날로그-디지털 변환 회로를 구비할 수 있다. 따라서, 도 10을 참조하면, 하나의 아날로그-디지털 변환 회로는 제1 내지 제4 구동 와이어(Wire1-Wire4)의 아날로그 신호(Sa)를 순차적으로 디지털 신호로 변환하는 디지털 변환 동작(ADC)을 수행할 수 있다.
디지털 변환부(240)는 디지털 변환 동작이 완료되면, 디지털 변환 동작의 완료를 통지하는 인터럽트 신호를 제어부(210)에 제공할 수 있다.
한편, 디지털 변환부(240)는 제어부(210)로부터 제공되는 스타트 플래그 신호(Ssf)에 따라, 디지털 변환 동작을 수행할 수 있다. 제어부(210)는 렌즈 배럴의 현재 위치를 정밀하게 판단하기 위하여, 구동 신호(Sdr)의 펄스가 제공되는 타이밍 - 구동 신호(Sdr)가 하이 레벨인 타이밍 - 에서, 디지털 변환부(240)가 디지털 변환 동작을 수행할 수 있도록, 스타트 플래그 신호(Ssf)를 제공할 수 있다.
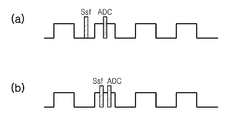
도 11은 본 발명의 다양한 실시예에 따른 디지털 변환 동작을 설명하기 위하여 제공되는 도이다.
도 11(a)는 본 발명의 일 실시예에 따른 제1 디지털 변환 동작 및 제2 디지털 변환 동작을 설명하기 위하여 제공되는 도이고, 도 11(b)는 본 발명의 일 실시예에 따른 제2 디지털 변환 동작을 설명하기 위하여 제공되는 도이다.
도 11(a) 및 도 11(b)를 참조하면, 스타트 플래그 신호(Ssf)의 제공 타이밍으로부터, 소정의 기준 시간 경과 후에, 디지털 변환 타이밍이 도래하여, 구동 신호(Sdr)의 펄스가 제공되는 타이밍에서, 디지털 변환 동작(ADC)이 수행될 수 있다.
도 11(a)를 참조하면, 제1 디지털 변환 동작을 위하여, 복수의 구동 와이어 중 리드(read)될 구동 와이어와 구동 신호의 복수의 펄스 중 리드(read) 될 펄스가 설정되면, 설정된 리드 대상에 해당하는 구동 와이어와 리드 대상이 되는 펄스에 따라 스타트 플래그 신호(Ssf)가 제공된다. 스타트 플래그 신호(Ssf)가 제공된 후, 소정의 기준 시간 경과 후에, 도래하는 디지털 변환 타이밍에 제공되는 펄스의 폭 내에서 디지털 변환 동작이 수행될 수 있다.
제1 디지털 변환 동작은 사전적으로 결정된 리드 대상에 해당하는 구동 와이어와 리드 대상에 해당하는 펄스에 따라 스타트 플래그 신호(Ssf)가 제공되어, 디지털 변환 동작이 수행되는 것으로 이해될 수 있다.
제2 디지털 변환 동작은 제1 디지털 변환 동작과 유사하나, 디지털 변환 동작이 리드 대상에 해당하는 펄스의 센터 구간에서 수행될 수 있다. 디지털 변환 동작이 리드 대상에 해당하는 펄스의 센터 구간에서 수행되기 위하여, 리드 대상에 해당하는 펄스의 듀티 폭의 절반을 연산하고, 연산된 듀티 폭의 절반을 고려하여, 스타트 플래그 신호(Ssf)가 제공될 수 있다.
도 11(c)를 참조하면, 제3 디지털 변환 동작은 디지털 변환 타이밍을 고정하여, 사전에 고정된 타이밍마다 주기적으로 스타트 플래그 신호(Ssf)가 제공되고, 제공된 스타트 플래그 신호(Ssf)에 따라 소정의 기준 시간의 경과 후에 디지털 변환 동작(ADC)이 수행될 수 있다. 다만, 디지털 변환 동작(ADC)은 스타트 플래그 신호(Ssf)가 제공된 후, 소정의 기준 신호가 제공되는 경우 마다 수행되는 것이 아니라, 디지털 변환 타이밍에 구동 신호의 펄스가 제공되는 경우에, 디지털 변환 동작이 수행될 수 있다.
도 12는 본 발명의 일 실시예에 따른 디더링 방식을 설명하기 위하여 제공되는 도이다. 도 12에서, 구동 신호(Sdr)가 제1 펄스(pulse 1) 내지 제4 펄스(pulse 4)를 포함하는 것으로 가정한다.
상술한 바와 같이, 구동부(220)는 제어 신호(Scon)의 채널 정보 및 전류 정보에 따라 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 구동 신호(Sdr)의 펄스 폭을 조절할 수 있다. 한편, 제어 신호(Scon)는 디더링 정보를 더 포함할 수 있고, 디더링 정보에 따라, 구동부(220)는 구동 신호(Sdr)의 펄스 폭을 추가적으로 조절하여, 디지털 변환부(240)의 디지털 변환 타이밍과 구동 신호의 펄스가 구동 와이어로 제공되는 타이밍을 동기화 할 수 있다.
구체적으로, 디지털 변환부(240)의 디지털 변환 타이밍과 구동 신호의 펄스가 구동 와이어로 제공되는 타이밍이 서로 다른 경우, 구동부(220)는, 디더링 정보에 의해, 디지털 변환 타이밍과 구동 신호의 펄스가 와이어로 제공되는 타이밍을 일치시킬 수 있다.
구동부(220)는 디더링 정보에 따라, 구동 신호의 펄스 폭을 디더링 폭(Dithering width) 만큼 증가시키거나 감소시킬 수 있다.
도 12를 참조하면, 구동부(220)는 디더링 정보에 따라, 제1 펄스(pulse 1) 내지 제4 펄스(pulse 4) 각각의 펄스 폭을 디더링 폭(Dithering width) 만큼 증가시키거나 감소시킬 수 있다. 구동부(220)는 인접하는 펄스 중 하나의 펄스의 폭은 디더링 폭(Dithering width) 만큼 증가시킬 수 있고, 다른 하나의 펄스의 폭은 디더링 폭(Dithering width) 만큼 감소시킬 수 있다.
예를 들어, 제1 펄스(pulse 1)의 폭을 증가시키는 경우, 제2 펄스(pulse 2)의 폭은 감소시킬 수 있다. 또한, 제3 펄스(pulse 3)의 폭을 증가시키는 경우, 제2 펄스(pulse 2)의 폭 또는 제4 펄스(pulse 4)의 폭을 감소시킬 수 있다.
본 발명의 일 실시예에 따르면, 구동 신호에 디더링 방식을 적용하여, 구동 신호의 펄스 폭을 유연하게 조절할 수 있다. 따라서, 디더링 방식이 적용된 구동 신호에 따라, 구동 신호(Sdr)의 펄스가 제공되는 타이밍에, 디지털 변환 동작이 보다 정밀하게 수행되어, 렌즈 배럴의 현재 위치를 정확히 검출할 수 있다.
도 13은 본 발명의 일 실시예에 따른 구동 신호의 듀티에 따른 저항의 그래프이다.
도 13의 저항 값은 제1 내지 제4 구동 와이어(Wire1-Wire4)에 구동 신호를 인가하여, 획득될 수 있다. 일 예로, 도 13의 저항 값은, 아날로그 신호가 디지털 변환된 디지털 값에 해당할 수 있다. 이하, 설명의 편의상, 디지털 값을 중심으로 본 발명의 동작을 설명하나, 이하의 내용이 저항 값에 그대로 적용될 수 있음은 물론이다.
이상적인(ideal) 경우, 동일한 듀티를 가지는 구동 신호가 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 경우, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 열 저항으로부터 산출되는 디지털 값(Digital Value)은 동일하다.
다만, 도 13을 참조하면, 동일한 듀티를 가지는 구동 신호가 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 경우에도, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 열 저항으로부터 산출되는 디지털 값(Digital Value)이 서로 다르고, 디지털 값(Digital Value)의 최대값 및 최소값에 대응하는 최소 듀티 및 최대 듀티는 서로 다른 것을 알 수 있다.
서로 다른 디지털 값과 같은 제1 내지 제4 구동 와이어(Wire1-Wire4)의 저항 특성 편차는 제1 내지 제4 구동 와이어(Wire1-Wire4)의 공정 편차로부터 발생하고, 특히, 도 8a 내지 도 8b과 같은 방식으로 제1 내지 제4 구동 와이어(Wire1-Wire4)의 체결시, 제1 내지 제4 구동 와이어(Wire1-Wire4)에 가해지는 로드에 의해 각 구동 와이어 간의 저항 특성 편차가 커질 수 있다.
따라서, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 정밀한 구동을 위하여, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 저항 특성 편차는 보정될 필요가 있다.
본 발명의 일 실시예에 따르면, 제어부(210)는 구동부(220)를 제어하여, 제로(Zero) 듀티부터 풀(full) 듀티까지의 구동 신호를 제1 내지 제4 구동 와이어(Wire1-Wire4)에 인가한다.
제1 내지 제4 구동 와이어(Wire1-Wire4)에 제로(Zero) 듀티부터 풀(full) 듀티까지의 구동 신호를 인가한 후, 각 구동 와이어 마다 최대 디지털 값 및 최대 디지털 값에 대응하는 최소 듀티, 최소 디지털 값 및 최소 디지털 값에 대응하는 최대 듀티를 결정한다. 도 13을 참조하면, 최대 디지털 값에 최소 듀티가 대응되고, 최소 디지털 값에 최대 듀티가 대응됨을 알 수 있다.
이 때, 최대 디지털 값을 가지는 듀티가 복수 개 존재하는 경우, 복수의 듀티 중 가장 큰 듀티가 최대 디지털 값에 대응되는 최소 듀티로 결정될 수 있다. 또한, 최소 디지털 값을 가지는 듀티가 복수 개 존재하는 경우, 복수의 듀티 중 가장 작은 듀티가 최소 디지털 값에 대응되는 최대 듀티로 선정될 수 있다. 최대 디지털 값에 대응하는 최소 듀티, 및 최소 디지털 값에 대응하는 최대 듀티에 의해, 제1 내지 제4 구동 와이어(Wire1-Wire4) 각각의 저항 특성의 선형 구간이 정의될 수 있다.
제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티 길이(Duty_Length)는 하기의 수학식 3에 따라 결정될 수 있다.
[수학식 3]
Duty_Length_w1 = Max_Duty_w1 - Min_Duty_w1
Duty_Length_w2 = Max_Duty_w2 - Min_Duty_w2
Duty_Length_w3 = Max_Duty_w3 - Min_Duty_w3
Duty_Length_w4 = Max_Duty_w4 - Min_Duty_w4
수학식 3을 참조하면, 제1 구동 와이어(Wire1)의 듀티 길이(Duty_Length_w1)는 최대 듀티(Max_Duty_w1)와 최소 듀티(Min_Duty_w1)의 차 따라 결정되고, 제2 구동 와이어(Wire2)의 듀티 길이(Duty_Length_w2)는 최대 듀티(Max_Duty_w2)와 최소 듀티(Min_Duty_w2)의 차 따라 결정되고, 제3 구동 와이어(Wire3)의 듀티 길이(Duty_Length_w3)는 최대 듀티(Max_Duty_w3)와 최소 듀티(Min_Duty_w3)의 차 따라 결정되고, 제4 구동 와이어(Wire4)의 듀티 길이(Duty_Length_w4)는 최대 듀티(Max_Duty_w4)와 최소 듀티(Min_Duty_w4)의 차 따라 결정된다. 즉, 듀티 길이는 선형 구간의 길이와 동일한 의미로 이해될 수 있다.
제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티 길이(Duty_Length)가 산출되면, 가장 짧은 듀티 길이를 최소 듀티 길이(Min_Duty_Length)로 결정한다. 최소 듀티 길이(Min_Duty_Length)에 의해 제1 내지 제4 구동 와이어(Wire1-Wire4)에 제공되는 구동 신호의 듀티 폭이 결정될 수 있다. 최소 듀티 길이(Min_Duty_Length)를 결정함으로써, 가장 작은 듀티 길이를 갖는 구동 와이어를 기준으로, 다른 와이어의 듀티 길이를 정규화(normalization)할 수 있다.
제1 내지 제4 구동 와이어(Wire1-Wire4)의 제어 가능한 최대 구동 듀티(Max_Duty_ drive)는 수학식 4에 따라 결정될 수 있다. 제어부는, 최소 듀티 길이(Min_Duty_Length)의 듀티 폭을 가지는 구동 신호를, 제1 내지 제4 구동 와이어 각각의 최소 듀티(Min_Duty)에서부터 제공하도록 구동부를 제어할 수 있다.
[수학식 4]
Max_Duty_drive_w1= Min_Duty_w1 + Min_Duty_Length
Max_Duty_drive_w2= Min_Duty_w2 + Min_Duty_Length
Max_Duty_drive_w3= Min_Duty_w3 + Min_Duty_Length
Max_Duty_drive_w4= Min_Duty_w4 + Min_Duty_Length
한편, 최소 듀티 길이(Min_Duty_Length)가 결정되면, 최소 듀티 길이(Min_Duty_Length)의 중간 값(half_Min_Duty_Length)을 산출한다. 최소 듀티 길이의 중간 값(half_Min_Duty_Length)이 산출되면, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티 길이(Duty_Length)의 중심(Duty_Length_center)은 수학식 5에 따라 결정될 수 있다.
[수학식 5]
Duty_Length_w1_center = Min_Duty_w1 + half_Min_Duty_Length
Duty_Length_w2_center = Min_Duty_w2 + half_Min_Duty_Length
Duty_Length_w3_center = Min_Duty_w3 + half_Min_Duty_Length
Duty_Length_w4_center = Min_Duty_w4 + half_Min_Duty_Length
제어부(210)는 제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티 길이의 중심(Duty_Length_center)의 정보를 이용하여, 제1 내지 제4 구동 와이어(Wire1-Wire4)를 보다 정밀하게 구동할 수 있다.
한편, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 디지털 값의 차이(Digital_value_diff)는 수학식 6과 같이, 각 구동 와이어의 최대 디지털 값(Max_Digital_value)과 최소 디지털 값(Min_Digital_value)의 차에 따라 결정될 수 있다.
[수학식 6]
Digital_value_diff_w1= Max_Digital_value_w1 - Min_Digital_value_w1
Digital_value_diff_w2= Max_Digital_value_w2 - Min_Digital_value_w2
Digital_value_diff_w3= Max_Digital_value_w1 - Min_Digital_value_w3
Digital_value_diff_w3= Max_Digital_value_w3 - Min_Digital_value_w3
제1 내지 제4 구동 와이어(Wire1-Wire4)의 디지털 값의 차이(Digital_value_diff)가 산출되면, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티에 대한 디지털 값의 기울기(slope)를 산출한다. 제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티에 대한 디지털 값의 기울기는 하기의 수학식 7에 따라 결정될 수 있다. 최대 디지털 값에 대응하는 최소 듀티, 및 최소 디지털 값에 대응하는 최대 듀티에 의해, 제1 내지 제4 구동 와이어(Wire1-Wire4) 각각의 저항 특성의 선형 구간이 정의되므로, 수학식 7에 의해 결정되는 기울기는 선형 구간의 기울기에 대응한다.
[수학식 7]
slope_w1 = Digital_value_diff_w1 / Duty_Length_w1
slope_w2 = Digital_value_diff_w2 / Duty_Length_w2
slope_w3 = Digital_value_diff_w3 / Duty_Length_w3
slope_w4 = Digital_value_diff_w4 / Duty_Length_w4
제1 내지 제4 구동 와이어(Wire1-Wire4)의 듀티에 대한 디지털 값의 기울기(slope)가 산출되면, 복수의 구동 와이어 중 어느 하나의 구동 와이어의 기울기를 기준 기울기로 선정하고, 선정된 기울기를 기준으로 나머지 기울기의 편차를 산출한다. 일 예로, 제어부는 복수의 구동 와이어 중 최소 듀티 길이를 가지는 구동 와이어, 즉, 선형 구간이 가장 짧은 구동 와이어를 기준 구동 와이어로 결정하고, 기준 구동 와이어의 디지털 값의 기울기를 기준 기울기로 결정할 수 있다.
기준 기울기(Reference_slope)가 결정되면, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 기울기에 대한 기준 기울기(Reference_slope)의 비에 따라, 편차(Offset)를 하기의 수학식 8에 따라 산출하고, 산출된 편차에 따라 보정 계수를 연산한다. 제어부(210)는 상기 구동부를 제어하여, 연산된 보정 계수를 구동 신호에 적용함으로써, 제1 내지 제4 구동 와이어(Wire1-Wire4)의 특성 편차를 보정할 수 있다.
[수학식 8]
Offset_w1 = slope_w1 / Reference_slope
Offset_w2 = slope_w2 / Reference_slope
Offset_w3 = slope_w3 / Reference_slope
Offset_w4 = slope_w4 / Reference_slope
이상에서 본 발명이 구체적인 구성요소 등과 같은 특정 사항들과 한정된 실시예 및 도면에 의해 설명되었으나, 이는 본 발명의 보다 전반적인 이해를 돕기 위해서 제공된 것일 뿐, 본 발명이 상기 실시예들에 한정되는 것은 아니며, 본 발명이 속하는 기술분야에서 통상적인 지식을 가진 자라면 이러한 기재로부터 다양한 수정 및 변형을 꾀할 수 있다.
따라서, 본 발명의 사상은 상기 설명된 실시예에 국한되어 정해져서는 아니 되며, 후술하는 특허청구범위뿐만 아니라 이 특허청구범위와 균등하게 또는 등가적으로 변형된 모든 것들은 본 발명의 사상의 범주에 속한다고 할 것이다.
10: 카메라 모듈
110: 하우징
120: 프레임
130: 렌즈 배럴
140: OIS 구동 와이어
150: AF 구동 와이어
160: 케이스
20: 액츄에이터
210: 제어부
220: 구동부
230: OIS 구동 와이어
240: 디지털 변환부
110: 하우징
120: 프레임
130: 렌즈 배럴
140: OIS 구동 와이어
150: AF 구동 와이어
160: 케이스
20: 액츄에이터
210: 제어부
220: 구동부
230: OIS 구동 와이어
240: 디지털 변환부
Claims (16)
- 렌즈 배럴을 광축에 수직한 방향으로 구동하는 복수의 구동 와이어;
상기 복수의 구동 와이어에 펄스 형태의 구동 신호를 제공하는 구동부;
상기 렌즈 배럴의 목표 위치 및 상기 렌즈 배럴의 현재 위치에 따라 제어 신호를 생성하여, 상기 구동부를 제어하는 제어부; 를 포함하고,
상기 제어부는, 상기 복수의 구동 와이어 각각의 저항 기울기를 비교하여, 상기 복수의 구동 와이어 간의 저항 편차를 산출하는 카메라 모듈의 액츄에이터.
- 제1항에 있어서, 상기 제어부는,
상기 복수의 구동 와이어 각각의 저항 기울기를, 선형 구간에서, 비교하는 카메라 모듈의 액츄에이터.
- 제2항에 있어서,
상기 선형 구간은, 상기 복수의 구동 와이어 각각의 최대 저항에 대응하는 최소 듀티, 및 최소 저항에 대응하는 최대 듀티에 의해 정의되는 카메라 모듈의 액츄에이터.
- 제3항에 있어서,
상기 선형 구간에서의 상기 저항 기울기는, 상기 최대 저항과 상기 최소 저항의 차에 대한, 상기 최소 듀티와 상기 최대 듀티의 차의 비에 따라 결정되는 카메라 모듈의 액츄에이터.
- 제1항에 있어서, 상기 제어부는,
상기 복수의 구동 와이어 간의 상기 저항 편차에 따라 보정 계수를 연산하는 카메라 모듈의 액츄에이터.
- 제5항에 있어서, 상기 구동부는,
상기 보정 계수를 상기 구동 신호에 적용하는 카메라 모듈의 액츄에이터.
- 제2항에 있어서, 상기 제어부는,
상기 복수의 구동 와이어 중 상기 선형 구간이 가장 짧은 구동 와이어를 기준 구동 와이어로 결정하는 카메라 모듈의 액츄에이터.
- 제7항에 있어서, 상기 제어부는,
상기 기준 구동 와이어의 저항 기울기에 대한 나머지 구동 와이어의 저항 기울기의 비에 따라, 상기 복수의 구동 와이어 간의 저항 편차를 산출하는 카메라 모듈의 액츄에이터.
- 렌즈 배럴을 광축에 수직한 방향으로 구동하는 복수의 구동 와이어;
상기 복수의 구동 와이어에 펄스 형태의 구동 신호를 제공하는 구동부;
상기 렌즈 배럴의 목표 위치 및 상기 렌즈 배럴의 현재 위치에 따라 제어 신호를 생성하여, 상기 구동부를 제어하는 제어부; 를 포함하고,
상기 제어부는, 상기 복수의 구동 와이어 중 저항 기울기의 선형 구간이 가장 짧은 기준 구동 와이어를 기준으로, 나머지 구동 와이어를 제어하는 카메라 모듈의 액츄에이터.
- 제9항에 있어서,
상기 선형 구간은, 상기 복수의 구동 와이어 각각의 최대 저항에 대응하는 최소 듀티, 및 최소 저항에 대응하는 최대 듀티에 의해 정의되는 카메라 모듈의 액츄에이터.
- 제10항에 있어서, 상기 제어부는,
상기 기준 구동 와이어의 최소 듀티에서부터 최대 듀티까지의 최소 듀티 길이에 따라, 상기 복수의 구동 와이어를 제어하는 카메라 모듈의 액츄에이터.
- 제11항에 있어서, 상기 구동부는,
상기 최소 듀티 길이의 듀티 폭을 가지는 구동 신호를, 상기 복수의 구동 와이어 각각의 상기 최소 듀티에서부터 제공하는 카메라 모듈의 액츄에이터.
- 제9항에 있어서,
상기 복수의 구동 와이어 각각의 저항 기울기를, 상기 선형 구간에서 비교하여, 상기 복수의 구동 와이어 간의 저항 편차를 산출하는 카메라 모듈의 액츄에이터.
- 제11항에 있어서,
상기 선형 구간에서의 상기 저항 기울기는, 상기 최대 저항과 상기 최소 저항의 차에 대한, 상기 최소 듀티와 상기 최대 듀티의 차의 비에 따라 결정되는 카메라 모듈의 액츄에이터.
- 제13항에 있어서, 상기 제어부는,
상기 복수의 구동 와이어 간의 상기 저항 편차에 따라 보정 계수를 연산하는 카메라 모듈의 액츄에이터.
- 제15항에 있어서, 상기 구동부는,
상기 보정 계수를 상기 구동 신호에 적용하는 카메라 모듈의 액츄에이터.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180138843A KR20200055317A (ko) | 2018-11-13 | 2018-11-13 | 카메라 모듈의 액츄에이터 |
| US16/451,575 US11457131B2 (en) | 2018-11-13 | 2019-06-25 | Actuator of camera module |
| CN201910921646.6A CN111050036B (zh) | 2018-10-15 | 2019-09-27 | 相机模块的致动器 |
| KR1020200119695A KR102283083B1 (ko) | 2018-11-13 | 2020-09-17 | 카메라 모듈의 액츄에이터 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180138843A KR20200055317A (ko) | 2018-11-13 | 2018-11-13 | 카메라 모듈의 액츄에이터 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200119695A Division KR102283083B1 (ko) | 2018-11-13 | 2020-09-17 | 카메라 모듈의 액츄에이터 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200055317A true KR20200055317A (ko) | 2020-05-21 |
Family
ID=70550907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180138843A KR20200055317A (ko) | 2018-10-15 | 2018-11-13 | 카메라 모듈의 액츄에이터 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US11457131B2 (ko) |
| KR (1) | KR20200055317A (ko) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7189852B2 (ja) * | 2019-09-11 | 2022-12-14 | 新思考電機有限公司 | レンズ駆動装置、カメラ装置及び電子機器 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8570384B2 (en) | 2009-02-09 | 2013-10-29 | Cambridge Mechatronics Limited | Camera apparatus having an SMA actuator system |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE602008005847D1 (de) | 2007-02-12 | 2011-05-12 | Cambridge Mechatronics Ltd | Auslösungsvorrichtung für formgedächtnislegierung |
| KR101044219B1 (ko) * | 2009-10-19 | 2011-06-29 | 삼성전기주식회사 | 렌즈 구동 모듈 |
| US8830335B2 (en) | 2010-02-26 | 2014-09-09 | Cambridge Mechatronics Limited | SMA actuation apparatus |
| JP2012047907A (ja) | 2010-08-25 | 2012-03-08 | Seiko Instruments Inc | 駆動モジュール、電子機器及び駆動モジュールの制御方法 |
| WO2012042722A1 (ja) * | 2010-09-27 | 2012-04-05 | コニカミノルタオプト株式会社 | 駆動装置 |
| WO2013175197A1 (en) | 2012-05-25 | 2013-11-28 | Cambridge Mechatronics Limited | Shape memory alloy actuation apparatus |
| GB201221306D0 (en) * | 2012-11-27 | 2013-01-09 | Cambridge Mechatronics Ltd | Suspension system for a camera lens element |
| KR20140081405A (ko) | 2012-12-21 | 2014-07-01 | 삼성전기주식회사 | 자이로센서 구동신호 이득제어장치 및 그 이득제어방법 |
| CN111522183B (zh) * | 2016-07-29 | 2021-12-31 | 台湾东电化股份有限公司 | 镜头驱动装置 |
| KR102642904B1 (ko) | 2016-11-28 | 2024-03-04 | 삼성전기주식회사 | 카메라 모듈의 액츄에이터 |
| IT201600125596A1 (it) * | 2016-12-13 | 2018-06-13 | Actuator Solutions GmbH | Stabilizzatore d'immagine ottico |
| WO2019137048A1 (zh) * | 2018-01-12 | 2019-07-18 | 宁波舜宇光电信息有限公司 | 光学致动器及相应的摄像模组和摄像模组阵列 |
| KR102609149B1 (ko) * | 2018-10-15 | 2023-12-05 | 삼성전기주식회사 | 카메라 모듈의 제조 방법 |
-
2018
- 2018-11-13 KR KR1020180138843A patent/KR20200055317A/ko active Application Filing
-
2019
- 2019-06-25 US US16/451,575 patent/US11457131B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8570384B2 (en) | 2009-02-09 | 2013-10-29 | Cambridge Mechatronics Limited | Camera apparatus having an SMA actuator system |
Also Published As
| Publication number | Publication date |
|---|---|
| US11457131B2 (en) | 2022-09-27 |
| US20200154009A1 (en) | 2020-05-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102609149B1 (ko) | 카메라 모듈의 제조 방법 | |
| US11156851B2 (en) | Lens moving apparatus | |
| CN109975973B (zh) | 驱动液体镜头的音圈马达及具有音圈马达的镜头组件 | |
| US20210281725A1 (en) | Lens moving apparatus | |
| CN108351484B (zh) | 透镜驱动装置及包括该装置的摄像机模块和光学设备 | |
| EP3537703B1 (en) | Camera module, dual camera module, optical device, and method for manufacturing dual camera module | |
| CN112034585B (zh) | 透镜移动装置 | |
| KR20170017273A (ko) | 렌즈 구동 장치 | |
| KR20200042259A (ko) | 카메라 모듈의 액츄에이터 | |
| CN111936928A (zh) | 相机模块 | |
| KR20200055317A (ko) | 카메라 모듈의 액츄에이터 | |
| KR20210041948A (ko) | 카메라 액추에이터 및 이를 포함하는 카메라 장치 | |
| KR102283083B1 (ko) | 카메라 모듈의 액츄에이터 | |
| US20230138300A1 (en) | Lens Assembly | |
| KR20200113748A (ko) | 카메라 장치 및 이의 제어 방법 | |
| KR20230005083A (ko) | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 | |
| CN111050036B (zh) | 相机模块的致动器 | |
| US20220163703A1 (en) | Liquid lens and camera module comprising same | |
| CN110720076B (zh) | 用于控制液体透镜的电路 | |
| KR20210041947A (ko) | 카메라 액추에이터 및 이를 포함하는 카메라 장치 | |
| CN113272731B (zh) | 致动器控制装置及方法 | |
| KR20200137589A (ko) | 액체 렌즈, 이 렌즈를 포함하는 렌즈 어셈블리 및 이 어셈블리를 포함하는 카메라 모듈 | |
| CN114128244A (zh) | 透镜驱动装置及包括其的摄像头模块和光学设备 | |
| KR20100075155A (ko) | 디지털 영상 처리장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| X601 | Decision of rejection after re-examination | ||
| A107 | Divisional application of patent |