KR20200044331A - 과적 단속 시스템에서의 회피 차량 검지 장치 - Google Patents
과적 단속 시스템에서의 회피 차량 검지 장치 Download PDFInfo
- Publication number
- KR20200044331A KR20200044331A KR1020180124910A KR20180124910A KR20200044331A KR 20200044331 A KR20200044331 A KR 20200044331A KR 1020180124910 A KR1020180124910 A KR 1020180124910A KR 20180124910 A KR20180124910 A KR 20180124910A KR 20200044331 A KR20200044331 A KR 20200044331A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- sensor
- lane
- weight
- avoidance
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/02—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing wheeled or rolling bodies, e.g. vehicles
- G01G19/03—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for weighing wheeled or rolling bodies, e.g. vehicles for weighing during motion
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/387—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for combinatorial weighing, i.e. selecting a combination of articles whose total weight or number is closest to a desired value
- G01G19/393—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups for combinatorial weighing, i.e. selecting a combination of articles whose total weight or number is closest to a desired value using two or more weighing units
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G19/00—Weighing apparatus or methods adapted for special purposes not provided for in the preceding groups
- G01G19/62—Over or under weighing apparatus
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/042—Detecting movement of traffic to be counted or controlled using inductive or magnetic detectors
Abstract
본 발명은 차량의 과적을 단속하는 과적 단속 시스템에 관한 것으로서, 본 발명의 과적 단속 시스템에서의 회피 차량 검지 장치에서, 각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제1 중량감지센서, 각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제2 중량감지센서, 각 차로마다 설치되어, 통행하는 차량을 감지하기 위한 루프센서, 각 차로마다 설치되어, 상기 제1 중량감지센서 및 상기 제2 중량감지센서를 피하기 위해 차로를 벗어나서 주행하는 차량인 회피 차량을 감지하기 위한 회피주행 감지센서 및 상기 제1 중량감지센서, 상기 제2 중량감지센서, 상기 루프센서, 상기 회피주행 감지센서로부터 감지된 신호를 이용하여 각 차로를 통행하는 차량 중에서 회피 차량을 판별하는 제어부를 포함한다. 본 발명에 의하면, 과적 단속 시스템에서 중량 센서를 회피하여 통과하기 위한 회피 차량을 검지함으로써, 정확한 중량 계측을 통해 과적 단속 업무의 효율성을 향상시킬 수 있는 효과가 있다.
Description
본 발명은 차량의 과적을 단속하는 과적 단속 시스템에 관한 것으로서, 더욱 상세하게는 과적 단속 시스템에서 단속을 회피하기 위한 회피 차량을 검지(檢知)하는 기술에 관한 것이다.
국가산업화의 지속적인 발전 및 이에 따른 물동량 증가로 인하여 기반 도로망의 유지보수에 많은 예산이 소요되고 있다. 특히 과적차량은 기반 도로의 파손을 가져오는 주된 요소이기 때문에 기반 도로에는 과적 차량을 측정하는 별도의 계중 센터가 마련되어 있어 차량의 중량을 계측하고 과적으로 판단될 경우 과태료를 부과하여 과적 차량을 단속하고 있다.
과적 차량으로 인한 폐해가 갈수록 증가하고 있는데, 예를 들어 과적 차량으로 인해 도로가 여기 저기 패이고 울퉁불퉁 해지게 되면서, 승용차와 같은 소형 차량 들에게 사고의 위험이 높아지고, 또한, 이로 인한 도로의 잦은 보수는 국민의 세금을 낭비하는 된다. 특히, 과적 화물 트럭에 의한 문제점은 교량이나 고가 도로와 같은 시설물의 파손에서 더 큰 문제점을 야기하게 되는데, 과적 화물 트럭으로 인한 피로 하중의 누적으로 갑작스런 붕괴 위험성이 높아지는 문제점이 있다. 따라서, 이러한 과적 차량을 단속하기 위한 시스템이 절실한 상황이다.
과적 단속 시스템이란 도로법 및 도로교통법을 위반하는 과적단속 차량을 고발하기 위한 시스템으로서, 차량의 중량을 측정한 후 규정된 중량이 초과되면 운영자가 고발하는 시스템이다. 이러한 시스템은 국도 검문소 및 한국도로공사에서 설치하여 운영되고 있다.
이러한 과적 단속 시스템에서 정확한 화물 차량의 중량을 측정하기 위해서는 차량을 정지상태로 놓고 측정하는 정적인 저울(계중기 또는 이동식 윤중기)을 사용해야 하지만, 고속도로 및 국도에서 정적인 저울을 사용할 경우 많은 교통량으로 인해 교통흐름에 심각한 문제가 유발되기 때문에, 대부분의 과적단속 시스템은 차량이 이동하면서 측정할 수 있는 WIM(Weigh-In-Motion) 시스템을 이용하고 있다.
WIM 시스템은 교통량의 효과는 좋으나 정확도의 문제로 인해 현재까지 법정계량기로 승인이 이루어지지 않았고, 그로 인해 2번 이상의 계중을 통해 과적단속을 진행하고 있는 실정이다. 2번 이상을 측정하기 위해서는 1차 측정 후 2차 측정 판단을 위해 운영자가 개입해야 하고, 365일 24시간 지속운영을 해야 하기 때문에 인력적인 비용이 많이 소요된다는 문제점이 있다.
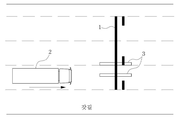
도 1은 종래 과적 단속 시스템을 도시한 도면이다.
도 1을 참조하면, 검문소에서의 과적단속 시스템은 고속 축중기와 저속 축중기 시스템을 이용하는 방안으로서, 화물차량이 도로로 통행하는 지점에 고속 축중기 시스템을 설치하여 차량의 중량을 검측한다.
고속 축중기(High Speed WIM, HS-WIM) 시스템은 저속 축중기(Low Speed WIM, LS-WIM) 시스템보다 정확도가 떨어지지만 고속으로 주행하는 화물차량의 중량을 측정할 수 있는 장점을 가지고 있다. 따라서 고속 축중기를 통해 1차 과적 의심 화물차량을 검측해내고, 검측된 1차 과적 의심 차량을 저속 축중기 시스템에서 2차로 검측하는 방식이다. 이는 교통흐름을 유지하면서 과적단속을 할 수 있는 효과적인 방식으로 세계의 많은 국가에서 유사한 방식으로 과적단속을 진행하고 있다. 이에 대한 구체적인 과적 단속 절차는 다음과 같다.
① 고속 축중기 시스템에서 화물차량을 검측 후 과적이 발생하면, 사무실에 “혐의차량발생” 알람을 울리고, 사무실에서는 초소 근무자에게 과적차량이 진입함을 벨로 알리고, 초소에 과적차량의 번호판을 알려준다.
② 고속 축중기 시스템은 초소 전방에 있으므로 초소 근무자는 초소밖으로 나와 깃발을 통해 과적차량을 저속 축중기로 유도하게 된다. 이때, 이 동영상을 도주차량 단속시스템의 CCTV가 녹화하게 된다.
③ 저속으로 진입한 차량은 2차 재검측을 하여 과적으로 판명되면 자인서를 작성하고 고발된다.
④ 만약 초소 근무자의 유도를 거부하고 도주하게 되면, 도주차량 단속시스템의 번호인식 제어기를 통해 도주차량을 적발하고, ②번의 CCTV 녹화영상과 함께 도주 사실에 대한 고발이 이루어진다.
이러한 과적 단속 시스템의 경우, 차로에 센서를 설치하여 센서를 통과하는 윤중량을 검측하는 방식으로 차량의 하중을 측정한다. 즉, 좌우 윤중의 합이 축중이며, 차량의 모든 축의 합하여 총 중량을 계산하는 것이다. 국내 도로법 기준으로 총 중량 40톤 초과, 축 중량 10톤 초과이면 과적차량으로 고발된다.
도 1에서 보는 바와 같이, 과적 단속 시스템은 각 차로에 중량을 감지하는 센서(1)를 설치하고 있으며, 이를 통해 각 차로를 통과하는 차량의 축 중량을 검지한다.
그러나, 종래 과적 단속 시스템에서는 센서(1)를 회피하여 주행하는 비정상 주행을 하는 차량에 대하여 정확한 계중을 하지 못하여, 과적 단속이 제대로 이루어지지 못하는 문제점이 있다. 종래 과적 단속 시스템에서 과적 단속을 회피하기 위한, 이른바 회피 주행을 하는 예를 설명하면 다음과 같다.
도 2는 3차로 도로에서 비정상 주행의 예이다.
도 2를 참조하면, 3차선 도로에 센서(1)가 설치되어 있는데, 화물 차량이 차로의 중앙으로 통과하지 않고, 차선을 밟고 지나가는 방식으로 비정상 주행을 하는 예이다. 이러한 예를 포함하여 종래 차량이 차로를 벗어나서 주행하는 회피주행의 경우를 살펴보면 다음과 같다.
1) 측대주행: 중앙분리대 측의 도로와 1차로를 걸쳐주행하는 경우로서, 측대쪽에 센서가 없어 차량의 중량이 감소하게 된다.
2) 양차로주행: 1-2차로에 걸쳐 주행하거나, 2-3차로에 걸쳐 주행하는 등과 같이 2개 차로를 걸쳐 주행하는 경우이다. 이 경우, 차로 단위로 단위차량을 분리하기 때문에 정확한 중량 계산이 불가능하게 된다.
3) 길어깨주행: 일반적으로 갓길로 운행하는 주행이다. 갓길은 도로의 폭이 일정하지 않고 포장재질이 약하여 중량센서를 설치하지 않으므로, 차량 중량 측정이 불가능하다.
4) 가감속주행: 차량이 센서구간에서 속도를 급격히 변화시켜 중량을 감소시키는 주행행위이다. 보통 중량을 측정하는 센서의 넓이가 좁기 때문에 센서 설치영역에서 급 가감속을 할 경우, 관성의 법칙에 의해 차량의 중량이 축에서 축으로 이동하는 효과가 발생하고, 이를 이용하여 적재중량을 속이는 방법이다.
5) 차선밟기: 차선을 밟고 주행하는 행위이다. 차선을 밟고 지나갈 경우, 센서의 끝부분을 걸쳐 밟기 때문에 윤중량이 적어지는 효과가 있으며, 실제로 운전자들이 가장 많이 사용하는 위법행위이다.
이러한 회피 주행이 많아질 경우, 과적 단속 시스템이 무력화되어 단속 행위가 불가능해지는 문제가 발생하게 된다.
예를 들어, 전술한 차선밟기 주행 차량의 경우에는 센서의 길이를 넓게 변경해도, 회피 주행 차량을 적발하기가 어렵다는 문제가 있다.
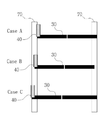
도 3은 회피 주행 중 차선 밟기 비정상 주행을 도시한 도면이다.
도 3을 참조하면, 차선 밝기 비정상 주행의 세가지 경우(Case A, Case B, Case C)가 도시되어 있는데, 중량 센서(30)의 길이를 조절하여 해결하는 것이 불가능하다는 것을 확인할 수 있다. 즉, 중량 센서(30)를 차선(70) 내부 끝선에 맞추는 경우(Case A), 또는 중량 센서(30)의 길이를 길게 하여 차선(70)을 모두 덮어서 맞추는 경우(Case C) 등 차량의 타이어(40)가 중량 센서(40)의 일 부분만을 밟고 지나가게 되면, 모두 비정상주행으로 인한 미검지 문제를 야기하게 된다.
본 발명은 상기와 같은 문제점을 해결하기 위하여 안출된 것으로서, 과적 단속 시스템에서 과적 단속을 피하기 위해 중량 센서를 회피하여 주행하는 차량을 검지하는 장치를 제공하는데 그 목적이 있다.
본 발명의 목적은 이상에서 언급한 목적으로 제한되지 않으며, 언급되지 않은 또 다른 목적들은 아래의 기재로부터 통상의 기술자에게 명확하게 이해될 수 있을 것이다.
이와 같은 목적을 달성하기 위한 본 발명의 과적 단속 시스템에서의 회피 차량 검지 장치에서, 각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제1 중량감지센서, 각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제2 중량감지센서, 각 차로마다 설치되어, 통행하는 차량을 감지하기 위한 루프센서, 각 차로마다 설치되어, 상기 제1 중량감지센서 및 상기 제2 중량감지센서를 피하기 위해 차로를 벗어나서 주행하는 차량인 회피 차량을 감지하기 위한 회피주행 감지센서 및 상기 제1 중량감지센서, 상기 제2 중량감지센서, 상기 루프센서, 상기 회피주행 감지센서로부터 감지된 신호를 이용하여 각 차로를 통행하는 차량 중에서 회피 차량을 판별하는 제어부를 포함한다.
본 발명에서, 각 차로에서 차량의 주행 방향을 기준으로, 상기 제1 중량감지센서, 상기 루프센서, 상기 제2 중량감지센서 및 상기 회피주행 감지센서의 순서로 위치한다.
그리고, 본 발명의 일 실시예에서 상기 회피주행 감지센서는 각 차로에 비스듬히 사선 방향으로 설치될 수 있다.
또는, 본 발명의 다른 실시예에서 상기 회피주행 감지센서는 각 차로마다 두 개씩 설치되되, 각 차로의 폭을 양분하는 가상의 중심선을 기준으로, 양쪽에 비스듬히 사선 방향으로 두 개씩 설치될 수 있다.
상기 제어부는 상기 회피주행 감지센서에서 감지된 신호를 이용하여 차량의 윤폭과 차로 내 차량의 위치를 산출하고, 산출된 윤폭과 위치를 통해 해당 차량이 상기 제1 중량감지센서 및 상기 제2 중량감지센서를 회피하는 주행을 하였는지 여부를 판단할 수 있다.
본 발명에 의하면, 과적 단속 시스템에서 중량 센서를 회피하여 통과하기 위한 회피 차량을 검지함으로써, 정확한 중량 계측을 통해 과적 단속 업무의 효율성을 향상시킬 수 있는 효과가 있다.
도 1은 종래 과적 단속 시스템을 도시한 도면이다.
도 2는 3차로 도로에서 비정상 주행의 예이다.
도 3은 회피 주행 중 차선 밟기 비정상 주행을 도시한 도면이다.
도 4는 본 발명의 일 실시예에 따른 과적 단속 시스템에서 회피 차량 검지 장치의 내부 구성을 보여주는 블록도이다.
도 5는 본 발명의 일 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃(layout)을 도시한 것이다.
도 6은 본 발명의 일 실시예에 따른 중량감지센서에서 감지된 신호 파형을 도시한 것이다.
도 7은 본 발명의 일 실시예에 따른 회피차량 감지센서에서 감지된 신호 파형을 도시한 것이다.
도 8은 본 발명의 일 실시예에 따른 차로 내 차량의 위치를 검측하는 방식을 설명하기 위한 도면이다.
도 9는 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃을 도시한 것이다.
도 10은 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 비정상 주행의 경우를 예시한 것이다.
도 2는 3차로 도로에서 비정상 주행의 예이다.
도 3은 회피 주행 중 차선 밟기 비정상 주행을 도시한 도면이다.
도 4는 본 발명의 일 실시예에 따른 과적 단속 시스템에서 회피 차량 검지 장치의 내부 구성을 보여주는 블록도이다.
도 5는 본 발명의 일 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃(layout)을 도시한 것이다.
도 6은 본 발명의 일 실시예에 따른 중량감지센서에서 감지된 신호 파형을 도시한 것이다.
도 7은 본 발명의 일 실시예에 따른 회피차량 감지센서에서 감지된 신호 파형을 도시한 것이다.
도 8은 본 발명의 일 실시예에 따른 차로 내 차량의 위치를 검측하는 방식을 설명하기 위한 도면이다.
도 9는 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃을 도시한 것이다.
도 10은 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 비정상 주행의 경우를 예시한 것이다.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서 상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 갖고 있다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥 상 갖는 의미와 일치하는 의미를 갖는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.
또한, 첨부 도면을 참조하여 설명함에 있어, 도면 부호에 관계없이 동일한 구성 요소는 동일한 참조 부호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.
도 4는 본 발명의 일 실시예에 따른 과적 단속 시스템에서 회피 차량 검지 장치의 내부 구성을 보여주는 블록도이고, 도 5는 본 발명의 일 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃(layout)을 도시한 것이다.
도 4 및 도 5를 참조하면, 본 발명의 과적 단속 시스템에서의 회피 차량 검지 장치(400)는 제1 중량감지센서(210), 제2 중량감지센서(220), 루프센서(300), 회피주행 감지센서(100), 제어부(410)를 포함한다.
제1 중량감지센서(210)는 각 차로마다 설치되어, 차량의 중량을 감지하는 역할을 한다.
제2 중량감지센서(220)는 각 차로마다 설치되어, 차량의 중량을 감지하는 역할을 한다.
루프센서(loop sensor)(300)는 각 차로마다 설치되어, 통행하는 차량을 감지하는 역할을 한다.
회피주행 감지센서(100)는 각 차로마다 설치되어, 제1 중량감지센서(210) 및 제2 중량감지센서(220)를 피하기 위해 차로를 벗어나서 주행하는 차량인 회피 차량을 감지하는 역할을 한다.
제어부(410)는 제1 중량감지센서(210), 제2 중량감지센서(220), 루프센서(300), 회피주행 감지센서(100)로부터 감지된 신호를 이용하여 각 차로를 통행하는 차량 중에서 회피 차량을 판별한다.
도 5에서 보는 바와 같이, 본 발명에서 각 차로에서 차량의 주행 방향을 기준으로, 제1 중량감지센서(210), 루프센서(300), 제2 중량감지센서(220) 및 회피주행 감지센서(100)의 순서로 위치되는 것이 바람직하다.
그리고, 회피주행 감지센서(100)는 각 차로에 비스듬히 사선 방향으로 설치될 수 있다. 본 발명에서 회피주행 감지센서(100)는 검측신호를 전기신호로 변환할 수 있는 다양한 전기신호 센서들이 사용될 수 있으며, 예를 들어 피에조 센서로 구현될 수 있다.
제1 중량감지센서(210) 및 제2 중량감지센서(220)는 각 차로마다 좌측 윤과 우측 윤을 각각 측정할 수 있는 길이로 설치될 수 있다.
제어부(410)는 회피주행 감지센서(100)에서 감지된 신호를 이용하여 차량의 윤폭과 차로 내 차량의 위치를 산출하고, 산출된 윤폭과 위치를 통해 해당 차량이 제1 중량감지센서(210) 및 제2 중량감지센서(220)를 회피하는 주행을 하였는지 여부를 판단한다.
본 발명에서는 도 5에서 보는 바와 같은 레이아웃의 센서를 배치하여 회피주행 차량을 검지할 수 있다. 이에 대해 구체적인 내용을 설명하면 다음과 같다.
1) 측대주행: 측대쪽을 통과하는 윤중값이 0이고, 1차로를 통과하는 윤중이 정상값이므로, 좌측 윤중값이 0이고, 우측 윤중값이 정상값이라는 결과를 통해 비정상주행을 검지할 수 있다.
2) 양차로주행: 두 개의 차로가 각각 차량의 중량을 검지하며, 각 차로의 결과에서 좌우 윤중이 0인 값을 갖는 경우 양차로 주행으로 판단한다. 여기서, 1차로의 경우 측대주행과 양차로주행의 결과가 동일한데, 이 경우 좌측과 우측의 윤중을 확인하여 측대주행인지 양차로주행인지를 판단한다.
3) 갓길주행: 중량이 검지되지 않고, 별도로 설치된 갓길센서의 루프트리거 신호를 통해 갓길주행 차량을 검지할 수 있다.
4) 가감속주행: 센서 간의 순간 속도를 계산하여 가감속주행 차량을 검지할 수 있다. 예를 들어, 제1 중량감지센서(210)와 루프센서(300) 간 속도, 루프센서(300)와 제2 중량감지센서(220) 간 속도, 제2 중량감지센서(220)와 회피주행 감지센서(100) 간 속도를 계산하고, 이에 대한 속도변화를 확인하여 가감속주행 차량을 검지할 수 있다.
5) 차선 밟기 주행: 차량의 타이어가 센서를 부분적으로 밟고 지나가는 차선 밝기 주행의 경우, 이에 대한 검지 과정은 다음과 같다.
본 발명에서 회피주행 감지센서(100)는 차로에 설치되어 차량이 주행할 경우차량이 차로내에서 주행하는 방향을 알 수 있으며, 또한 신호파형을 통해 차량의 윤폭을 계산할 수 있다.
도 6은 본 발명의 일 실시예에 따른 중량감지센서에서 감지된 신호 파형을 도시한 것이다.
도 6을 참조하면, 중량감지센서(210), 220)에서 차량의 축이 통과하면서 이에 대한 중량을 감지하는 것이 신호 파형으로 나타나 있다.
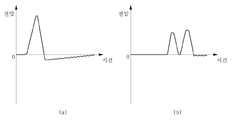
도 7은 본 발명의 일 실시예에 따른 회피차량 감지센서에서 감지된 신호 파형을 도시한 것이다. 도 7에서 (a)는 싱글타이어가 구비된 차량의 경우이고, (b)는 듀얼타이어가 구비된 차량의 경우이다.
도 7을 참조하면, 회피차량 감지센서(100)에 타이어가 최초로 접촉한 시점부터 신호파형이 시작되고, 타이어가 벗어난 시점에 신호파형이 종료된다. 즉, 신호파형은 타이어가 회피차량 감지센서(100)에 접촉한 시점부터 벗어난 시점가지를 나타낸다. 이러한 신호 파형의 상승하는 시작점과 끝점간의 간격을 통해 차량의 윤폭을 계산할 수 있다.
도 8은 본 발명의 일 실시예에 따른 차로 내 차량의 위치를 검측하는 방식을 설명하기 위한 도면이다.
도 8을 참조하면, 차량이 제2 중량감지센서(220)와 회피주행 감지센서(100)를 통과한 경우이다. 여기서, 차로에 센서 설치시, 제2 중량감지센서(220)와 회피주행 감지센서(100)가 이루는 각도(θ)와, 제2 중량감지센서(220)의 길이 및 차로 내 위치 정보는 미리 설정되어 있다고 가정한다.
전술한 바와 같이, 차량이 제2 중량감지센서(220)를 통과할 때의 속도(V)를 계산할 수 있다.
그리고, 차량이 제2 중량감지센서(220)를 통과한 시간을 Wt라 하고, 차량이 회피주행 감지센서(100)를 통과한 시간을 Pt라 하면, 차량이 제2 중량감지센서(220)와 회피주행 감지센서(100)를 통과한 시간을 Lt=Pt-Wt로 나타낼 수 있다.
그러면, 차량이 제2 중량감지센서(220)와 회피주행 감지센서(100)를 통과한 거리 S=V×Lt로 계산할 수 있다.
도 8에서, 차량이 통과한 통과 지점(710)을 알고 있으므로, 전술한 정보를 통해 θ를 하나의 각으로 하는 삼각형을 구할 수 있고, 이 삼각형에서 제2 중량감지센서(220)와 회피주행 감지센서(100) 사이의 거리(S)를 이미 계산하여 알고 있다. 여기서, 중량감지센서(220)와 회피주행 감지센서(100) 사이의 거리(S)를 Lheight라 하면, 삼각함수의 탄젠트(tangent) 정보를 이용하여 제2 중량감지센서(220) 상의 길이 Ltarget을 다음과 같이 구할 수 있다.
[수학식 1]
Tan(θ)= Lheight / Ltarget
Ltarget = Lheight×Tan(θ)
여기서, SS와 통과 지점(710) 간의 거리이다.
이상의 방식을 통해, 차로를 통행하는 차량의 위치정보와 윤폭을 계산할 수 있다. 그리고, 차량이 차선을 밟고 주행하는 회피 주행을 하는 경우, 차선으로부터의 위치정보와 윤폭을 계산하여, 중량감지센서(210, 220)를 정확히 밟고 지나갔는지 여부를 판단할 수 있다.
도 9는 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 센서들의 레이아웃을 도시한 것이다.
도 9의 실시예는 도 5의 제1 실시예에서 회피주행 감지센서의 형태를 변경한 제2 실시예이다.
도 9를 참조하면, 본 발명의 제2 실시예에서 회피주행 감지센서(101, 102)는 각 차로마다 두 개씩 설치되되, 각 차로의 폭을 양분하는 가상의 중심선을 기준으로, 양쪽에 비스듬히 사선 방향으로 두 개씩 설치될 수 있다.
이렇게 본 발명에서는 다른 실시예를 통해 두 개의 회피주행 감지센서(101, 102)로부터 좌측 윤폭과 우측 윤폭을 각각 구할 수 있으며, 이를 응용하여 다음과 같은 경우의 비정상 주행 행태를 검지할 수 있다.
도 10은 본 발명의 다른 실시예에 따른 회피 차량 검지 장치에서 비정상 주행의 경우를 예시한 것이다.
도 10을 참조하면, 제1 회피주행 감지센서(101)에서 검측된 윤폭과 제2 회피주행 감지센서(102)에서 검측된 윤폭을 비교하여, 정상주행과 비정상주행을 판단할 수 있다. 즉, 제1 회피주행 감지센서(101)에서 검측된 윤폭과 제2 회피주행 감지센서(102)에서 검측된 윤폭을 비교하여, 도 10과 같이 윤폭이 동일하지 않으면, 차선(70)을 밟고 주행하는 등, 중량감지센서를 제대로 통과하지 않고, 회피 주행을 한 것으로 판단하여, 회피 차량을 검지할 수 있다.
과적 단속 시스템에서 단속 데이터의 신뢰성을 검증할 수 없는 예외 상황은 시스템 전체의 성능 및 기능을 무효화 할 수 있는 치명적인 단점이 될 수 있다. 이처럼, 과적 단속 시스템에서 중량 정보에 대한 신뢰성 부분은 어떠한 기능보다 중요하며, 이를 명확히 검증하지 못한다면 운전자와의 대면 단속 시 기술적인 마찰을 피할 수 없게 된다.
본 발명은 이러한 기존의 과적 단속 시스템이 가지고 있는 치명적인 약점이며, 가장 많이 발생하는 회피주행 중 하나인 차선 밟기에 대해 정확한 검지가 가능함으로써, 과적 단속 장비의 중량 검지 예외 상황을 제거하였고, 이를 통해 과적 단속 업무의 효율성을 향상시킬 수 있다.
이상 본 발명을 몇 가지 바람직한 실시예를 사용하여 설명하였으나, 이들 실시예는 예시적인 것이며 한정적인 것이 아니다. 본 발명이 속하는 기술분야에서 통상의 지식을 지닌 자라면 본 발명의 사상과 첨부된 특허청구범위에 제시된 권리범위에서 벗어나지 않으면서 다양한 변화와 수정을 가할 수 있음을 이해할 것이다.
100 회피주행 감지센서
210 제1 중량감지센서
220 제2 중량감지센서 300 루프센서
410 제어부 400 회피 차량 검지 장치
220 제2 중량감지센서 300 루프센서
410 제어부 400 회피 차량 검지 장치
Claims (4)
- 과적 단속 시스템에서의 회피 차량 검지 장치에서,
각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제1 중량감지센서;
각 차로마다 설치되어, 차량의 중량을 감지하기 위한 제2 중량감지센서;
각 차로마다 설치되어, 통행하는 차량을 감지하기 위한 루프센서;
각 차로마다 설치되어, 상기 제1 중량감지센서 및 상기 제2 중량감지센서를 피하기 위해 차로를 벗어나서 주행하는 차량인 회피 차량을 감지하기 위한 회피주행 감지센서; 및
상기 제1 중량감지센서, 상기 제2 중량감지센서, 상기 루프센서, 상기 회피주행 감지센서로부터 감지된 신호를 이용하여 각 차로를 통행하는 차량 중에서 회피 차량을 판별하는 제어부를 포함하며,
각 차로에서 차량의 주행 방향을 기준으로, 상기 제1 중량감지센서, 상기 루프센서, 상기 제2 중량감지센서 및 상기 회피주행 감지센서의 순서로 위치되는 것을 특징으로 하는 회피 차량 검지 장치.
- 청구항 1에 있어서,
상기 회피주행 감지센서는 각 차로에 비스듬히 사선 방향으로 설치되는 것을 특징으로 하는 회피 차량 검지 장치
- 청구항 1에 있어서,
상기 회피주행 감지센서는 각 차로마다 두 개씩 설치되되, 각 차로의 폭을 양분하는 가상의 중심선을 기준으로, 양쪽에 비스듬히 사선 방향으로 두 개씩 설치되는 것을 특징으로 하는 회피 차량 검지 장치
- 청구항 2 또는 청구항 3에 있어서,
상기 제어부는 상기 회피주행 감지센서에서 감지된 신호를 이용하여 차량의 윤폭과 차로 내 차량의 위치를 산출하고, 산출된 윤폭과 위치를 통해 해당 차량이 상기 제1 중량감지센서 및 상기 제2 중량감지센서를 회피하는 주행을 하였는지 여부를 판단하는 것을 특징으로 하는 회피 차량 검지 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180124910A KR20200044331A (ko) | 2018-10-19 | 2018-10-19 | 과적 단속 시스템에서의 회피 차량 검지 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180124910A KR20200044331A (ko) | 2018-10-19 | 2018-10-19 | 과적 단속 시스템에서의 회피 차량 검지 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200044331A true KR20200044331A (ko) | 2020-04-29 |
Family
ID=70466528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180124910A KR20200044331A (ko) | 2018-10-19 | 2018-10-19 | 과적 단속 시스템에서의 회피 차량 검지 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20200044331A (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102414212B1 (ko) * | 2021-03-09 | 2022-06-28 | 김학선 | 트럭스케일 및 이를 이용한 차량의 중량계측 감시 시스템 |
| KR102652609B1 (ko) * | 2023-12-20 | 2024-04-01 | 한국건설기술연구원 | 과적단속구간에서 비정상 가감속 형태로 주행하는 과적혐의차량의 식별을 위한 화물차량의 속도 프로파일 산출방법 및 산출장치 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101115589B1 (ko) | 2011-08-24 | 2012-03-05 | 한국도로전산 주식회사 | 차량 중량 측정 장치 및 방법 |
-
2018
- 2018-10-19 KR KR1020180124910A patent/KR20200044331A/ko not_active Application Discontinuation
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101115589B1 (ko) | 2011-08-24 | 2012-03-05 | 한국도로전산 주식회사 | 차량 중량 측정 장치 및 방법 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102414212B1 (ko) * | 2021-03-09 | 2022-06-28 | 김학선 | 트럭스케일 및 이를 이용한 차량의 중량계측 감시 시스템 |
| KR102652609B1 (ko) * | 2023-12-20 | 2024-04-01 | 한국건설기술연구원 | 과적단속구간에서 비정상 가감속 형태로 주행하는 과적혐의차량의 식별을 위한 화물차량의 속도 프로파일 산출방법 및 산출장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021143097A1 (zh) | 一种基于压电路面的车辆交通状态自感知预警系统 | |
| US20100231720A1 (en) | Traffic Monitoring | |
| CN109855711B (zh) | 一种车辆超载超限动态称重系统 | |
| CN111105622B (zh) | 违规停车纠正方法、装置以及存储介质 | |
| KR101231791B1 (ko) | 강교량 수직보강재의 응답특성을 이용한 차량중량 계측 시스템 | |
| KR100860394B1 (ko) | 고속, 저속겸용 축중기 및 차량정보, 교통량검출장치 | |
| US8502697B2 (en) | Mid-block traffic detection and signal control | |
| KR20200044331A (ko) | 과적 단속 시스템에서의 회피 차량 검지 장치 | |
| KR102108320B1 (ko) | 축중기 시스템에서 축하중 오차를 보정하기 위한 보정값 산정 방법 및 이를 구현하는 축중기 중량 보정 시스템 | |
| KR101816566B1 (ko) | 차량센서를 활용한 교량 유지관리 시스템 및 그 방법 | |
| JP3721874B2 (ja) | 軸重計測装置 | |
| KR20140065037A (ko) | 차량의 통과높이 제한 시스템 | |
| JP4580995B2 (ja) | 道路交通管制システム | |
| CN113870580B (zh) | 用于货车的超速检测方法、装置、货车车辆及货车系统 | |
| KR100881428B1 (ko) | 차량 충돌 방지 방법 및 장치 | |
| Sunkari et al. | Performance of advance warning for end of green system for high-speed signalized intersections | |
| KR101764601B1 (ko) | 화물차 축 간격 측정용 다기능 패드 센서 및 이를 이용한 과적단속 장치 | |
| CN110033619A (zh) | 一种高速公路路况检测方法及其系统 | |
| KR20200043043A (ko) | 무인 과적 단속 시스템 | |
| CN106908129B (zh) | 一种智能化区域车辆超重检测、预警系统及方法 | |
| CN115731699A (zh) | 高速公路碰撞护栏事故检测与主动诱导方法与系统 | |
| CN212779526U (zh) | 一种路面通行车辆限高限重监测系统 | |
| JP4128962B2 (ja) | 道路交通管制システム | |
| CN209560712U (zh) | 货运源头企业超限超载检测系统 | |
| CN113421434A (zh) | 用于公路治超非现场执法的超限超载率计算方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| E601 | Decision to refuse application |