KR20200041810A - 영상 신호 부호화/복호화 방법 및 이를 위한 장치 - Google Patents
영상 신호 부호화/복호화 방법 및 이를 위한 장치 Download PDFInfo
- Publication number
- KR20200041810A KR20200041810A KR1020190126375A KR20190126375A KR20200041810A KR 20200041810 A KR20200041810 A KR 20200041810A KR 1020190126375 A KR1020190126375 A KR 1020190126375A KR 20190126375 A KR20190126375 A KR 20190126375A KR 20200041810 A KR20200041810 A KR 20200041810A
- Authority
- KR
- South Korea
- Prior art keywords
- block
- intra prediction
- sub
- current block
- prediction mode
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 150
- 239000013074 reference sample Substances 0.000 claims abstract description 251
- 230000009466 transformation Effects 0.000 claims description 111
- 238000006243 chemical reaction Methods 0.000 claims description 108
- 239000000523 sample Substances 0.000 description 147
- 230000033001 locomotion Effects 0.000 description 66
- 238000000638 solvent extraction Methods 0.000 description 56
- IESVDEZGAHUQJU-ZLBXKVHBSA-N 1-hexadecanoyl-2-(4Z,7Z,10Z,13Z,16Z,19Z-docosahexaenoyl)-sn-glycero-3-phosphocholine Chemical compound CCCCCCCCCCCCCCCC(=O)OC[C@H](COP([O-])(=O)OCC[N+](C)(C)C)OC(=O)CC\C=C/C\C=C/C\C=C/C\C=C/C\C=C/C\C=C/CC IESVDEZGAHUQJU-ZLBXKVHBSA-N 0.000 description 55
- 238000013139 quantization Methods 0.000 description 46
- 238000005192 partition Methods 0.000 description 40
- 238000010586 diagram Methods 0.000 description 36
- 239000013598 vector Substances 0.000 description 33
- 238000001914 filtration Methods 0.000 description 16
- 208000037170 Delayed Emergence from Anesthesia Diseases 0.000 description 11
- 230000008569 process Effects 0.000 description 10
- 238000012937 correction Methods 0.000 description 9
- 230000006870 function Effects 0.000 description 9
- 239000011159 matrix material Substances 0.000 description 8
- 238000012545 processing Methods 0.000 description 7
- 230000003044 adaptive effect Effects 0.000 description 6
- PXFBZOLANLWPMH-UHFFFAOYSA-N 16-Epiaffinine Natural products C1C(C2=CC=CC=C2N2)=C2C(=O)CC2C(=CC)CN(C)C1C2CO PXFBZOLANLWPMH-UHFFFAOYSA-N 0.000 description 5
- 239000002131 composite material Substances 0.000 description 5
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 239000008188 pellet Substances 0.000 description 4
- 230000008707 rearrangement Effects 0.000 description 4
- 230000002457 bidirectional effect Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 238000009499 grossing Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000001131 transforming effect Effects 0.000 description 2
- 235000008733 Citrus aurantifolia Nutrition 0.000 description 1
- 101100332287 Dictyostelium discoideum dst2 gene Proteins 0.000 description 1
- 101100264226 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) XRN1 gene Proteins 0.000 description 1
- 235000011941 Tilia x europaea Nutrition 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 239000004571 lime Substances 0.000 description 1
- 238000013507 mapping Methods 0.000 description 1
- 229940050561 matrix product Drugs 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 230000001151 other effect Effects 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000010845 search algorithm Methods 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images


























Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
- H04N19/463—Embedding additional information in the video signal during the compression process by compressing encoding parameters before transmission
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/593—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving spatial prediction techniques
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/11—Selection of coding mode or of prediction mode among a plurality of spatial predictive coding modes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/119—Adaptive subdivision aspects, e.g. subdivision of a picture into rectangular or non-rectangular coding blocks
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/12—Selection from among a plurality of transforms or standards, e.g. selection between discrete cosine transform [DCT] and sub-band transform or selection between H.263 and H.264
- H04N19/122—Selection of transform size, e.g. 8x8 or 2x4x8 DCT; Selection of sub-band transforms of varying structure or type
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/129—Scanning of coding units, e.g. zig-zag scan of transform coefficients or flexible macroblock ordering [FMO]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/132—Sampling, masking or truncation of coding units, e.g. adaptive resampling, frame skipping, frame interpolation or high-frequency transform coefficient masking
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/157—Assigned coding mode, i.e. the coding mode being predefined or preselected to be further used for selection of another element or parameter
- H04N19/159—Prediction type, e.g. intra-frame, inter-frame or bidirectional frame prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/90—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using coding techniques not provided for in groups H04N19/10-H04N19/85, e.g. fractals
- H04N19/94—Vector quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/90—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using coding techniques not provided for in groups H04N19/10-H04N19/85, e.g. fractals
- H04N19/96—Tree coding, e.g. quad-tree coding
Abstract
본 발명에 따른 영상 복호화 방법은, 현재 블록의 참조 샘플 라인을 결정하는 단계, 상기 현재 블록의 인트라 예측 모드와 동일한 후보 인트라 예측 모드가 존재하는지 여부를 결정하는 단계, 상기 결정을 기초로, 상기 현재 블록의 인트라 예측 모드를 유도하는 단계, 및 상기 참조 샘플 라인 및 상기 인트라 예측 모드를 기초로, 상기 현재 블록에 대한 인트라 예측을 수행하는 단계를 포함한다. 이때, 상기 후보 인트라 예측 모드들 중 적어도 하나는, 상기 현재 블록의 상단 이웃 블록의 인트라 예측 모드 및 상기 현재 블록의 좌측 이웃 블록의 인트라 예측 모드 중 최대값에 오프셋을 가산 또는 감산하여 유도될 수 있다.
Description
본 발명은 영상 신호 부호화/복호화 방법 및 이를 위한 장치에 관한 것이다.
디스플레이 패널이 점점 더 대형화되는 추세에 따라 점점 더 높은 화질의 비디오 서비스가 요구되고 있다. 고화질 비디오 서비스의 가장 큰 문제는 데이터량이 크게 증가하는 것이며, 이러한 문제를 해결하기 위해, 비디오 압축율을 향상시키기 위한 연구가 활발하게 진행되고 있다. 대표적인 예로, 2009년에 MPEG(Motion Picture Experts Group)과 ITU-T(International Telecommunication Union-Telecommunication) 산하의 VCEG(Video Coding Experts Group)에서는 JCT-VC(Joint Collaborative Team on Video Coding)를 결성하였다. JCT-VC는 H.264/AVC에 비해 약 2배의 압축 성능을 갖는 비디오 압축 표준인 HEVC(High Efficiency Video Coding)를 제안하였으며, 2013년 1월 25일에 표준 승인되었다. 고화질 비디오 서비스의 급격한 발전에 따라 HEVC의 성능도 점차 적으로 그 한계를 드러내고 있다.
본 발명은 비디오 신호를 부호화/복호화함에 있어서, 현재 블록에 인접하는 이웃 블록의 인트라 예측 모드를 기초로, 후보 인트라 예측 모드를 유도하는 방법 및 상기 방법을 수행하기 위한 장치를 제공하는 것을 목적으로 한다.
본 발명은 비디오 신호를 부호화/복호화함에 있어서, 코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하고, 서브 블록들 각각에 대해 인트라 예측을 수행하는 방법 및 상기 방법을 수행하기 위한 장치를 제공하는 것을 목적으로 한다.
본 발명은 비디오 신호를 부호화/복호화함에 있어서, 코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하고, 서브 블록들 중 일부에 대해서만 변환을 수행하는 방법 및 상기 방법을 수행하기 위한 장치를 제공하는 것을 목적으로 한다.
본 발명에서 이루고자 하는 기술적 과제들은 이상에서 언급한 기술적 과제들로 제한되지 않으며, 언급하지 않은 또 다른 기술적 과제들은 아래의 기재로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
본 발명에 따른 비디오 신호 복호화/부호화 방법은, 현재 블록의 참조 샘플 라인을 결정하는 단계, 상기 현재 블록의 인트라 예측 모드와 동일한 후보 인트라 예측 모드가 존재하는지 여부를 결정하는 단계, 상기 결정을 기초로, 상기 현재 블록의 인트라 예측 모드를 유도하는 단계, 및 상기 참조 샘플 라인 및 상기 인트라 예측 모드를 기초로, 상기 현재 블록에 대한 인트라 예측을 수행하는 단계를 포함한다. 이때, 상기 후보 인트라 예측 모드들 중 적어도 하나는, 상기 현재 블록의 상단 이웃 블록의 인트라 예측 모드 및 상기 현재 블록의 좌측 이웃 블록의 인트라 예측 모드 중 최대값에 오프셋을 가산 또는 감산하여 유도될 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 상기 상단 이웃 블록의 인트라 예측 모드 및 상기 좌측 이웃 블록의 인트라 예측 모드의 차분이 64인 경우, 상기 후보 인트라 예측 모드들 중 적어도 하나는 상기 최대값에 2를 가산 또는 감산하여 유도될 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 상기 참조 샘플 라인의 인덱스에 따라, 상기 후보 인트라 예측 모드들의 개수가 상이할 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 상기 현재 블록을 복수의 서브 블록들로 분할할 것인지 여부를 결정하는 단계를 더 포함하고, 상기 현재 블록이 복수의 서브 블록들로 분할되는 경우, 상기 복수의 서브 블록들은 하나의 인트라 예측 모드를 공유할 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 상기 복수의 서브 블록들 중 일부에 대해서는 역변환이 생략될 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 서브 블록의 수평 방향 변환 타입은 상기 서브 블록의 너비를 기초로 결정되고, 상기 서브 블록의 수직 방향 변환 타입은 상기 서브 블록의 높이를 기초로 결정될 수 있다.
본 발명에 따른 비디오 신호 복호화/부호화 방법에 있어서, 서브 블록의 수평 방향 변환 타입 및 수직 방향 변환 타입은 상기 서브 블록의 형태를 기초로 결정될 수 있다.
본 발명에 대하여 위에서 간략하게 요약된 특징들은 후술하는 본 발명의 상세한 설명의 예시적인 양상일 뿐이며, 본 발명의 범위를 제한하는 것은 아니다.
본 발명에 의하면, 현재 블록에 인접하는 이웃 블록의 인트라 예측 모드와 유사한 후보 인트라 예측 모드를 유도함으로써, 인트라 예측 효율을 향상시킬 수 있다.
본 발명에 의하면, 코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하고, 서브 블록들 각각에 대해 인트라 예측을 수행함으로써, 인트라 예측 효율을 향상시킬 수 있다.
본 발명에 의하면, 코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하고, 서브 블록들 중 일부에 대해서만 변환을 수행함으로써, 부호화/복호화 효율을 향상시킬 수 있다.
본 발명에서 얻을 수 있는 효과는 이상에서 언급한 효과들로 제한되지 않으며, 언급하지 않은 또 다른 효과들은 아래의 기재로부터 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 명확하게 이해될 수 있을 것이다.
도 1은 본 발명의 일 실시예에 따른 영상 부호화기(인코더기)의 블록도이다.
도 2는 본 발명의 일 실시예에 따른 영상 복호화기(디코더기)의 블록도이다.
도 3은 본 발명의 일 실시예에 따른 기본 코딩 트리 유닛을 도시한 도면이다.
도 4는 코딩 블록의 다양한 분할 형태를 나타낸 도면이다.
도 5는 코딩 트리 유닛의 분할 양상을 예시한 도면이다.
도 6은 본 발명의 일 실시예에 따른 인터 예측 방법의 흐름도이다.
도 7은 콜로케이티드 블록을 나타낸 도면이다.
도 8은 본 발명의 일 실시예에 따른, 인트라 예측 방법의 흐름도이다.
도 9는 각 참조 샘플 라인이 포함하는 참조 샘플들을 나타낸 도면이다.
도 10은 인트라 예측 모드들을 나타낸 도면이다.
도 11 및 도 12는 참조 샘플들을 일렬로 배열하는 일차원 배열의 예시를 나타낸 도면이다.
도 13은 방향성 인트라 예측 모드들이 x축과 평행한 직선과 형성하는 각도를 예시한 도면이다.
도 14는 현재 블록이 비정방 형태인 경우, 예측 샘플이 획득되는 양상을 나타낸 도면이다.
도 15는 와이드 앵글 인트라 예측 모드들을 나타낸 도면이다.
도 16은 수직 방향 파티셔닝 및 수평 방향 파티셔닝의 일 예를 나타낸 도면이다.
도 17은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
도 18은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
도 19는 코딩 블록의 인트라 예측 모드에 기초하여, 코딩 블록의 분할 형태가 결정되는 예를 나타낸 도면이다.
도 20은 코딩 블록의 분할 양상을 설명하기 위한 도면이다.
도 21은 서브 블록별로 예측 부호화 모드가 상이하게 설정되는 예를 나타낸 도면이다.
도 22는 PDPC의 적용 양상을 나타낸 도면이다.
도 23 및 도 24는 제2 변환이 수행될 서브 블록을 나타낸 도면이다.
도 25는 현재 블록의 변환 타입이 결정되는 예를 설명하기 위한 도면이다.
도 26은 서브 블록의 변환 타입을 결정하는 예를 나타낸 도면이다.
도 27은 서브 블록들의 잔차 계수가 0로 설정되는 예를 설명하기 위한 도면이다.
도 28은 비트스트림을 통해 시그날링되는 정보에 기초하여, 변환 및/또는 양자화가 수행된 서브 블록의 위치가 특정되는 예를 나타낸 것이다.
도 29는 블록 강도를 결정하는 과정을 나타낸 흐름도이다.
도 30은 기 정의된 필터 후보들을 나타낸다.
도 2는 본 발명의 일 실시예에 따른 영상 복호화기(디코더기)의 블록도이다.
도 3은 본 발명의 일 실시예에 따른 기본 코딩 트리 유닛을 도시한 도면이다.
도 4는 코딩 블록의 다양한 분할 형태를 나타낸 도면이다.
도 5는 코딩 트리 유닛의 분할 양상을 예시한 도면이다.
도 6은 본 발명의 일 실시예에 따른 인터 예측 방법의 흐름도이다.
도 7은 콜로케이티드 블록을 나타낸 도면이다.
도 8은 본 발명의 일 실시예에 따른, 인트라 예측 방법의 흐름도이다.
도 9는 각 참조 샘플 라인이 포함하는 참조 샘플들을 나타낸 도면이다.
도 10은 인트라 예측 모드들을 나타낸 도면이다.
도 11 및 도 12는 참조 샘플들을 일렬로 배열하는 일차원 배열의 예시를 나타낸 도면이다.
도 13은 방향성 인트라 예측 모드들이 x축과 평행한 직선과 형성하는 각도를 예시한 도면이다.
도 14는 현재 블록이 비정방 형태인 경우, 예측 샘플이 획득되는 양상을 나타낸 도면이다.
도 15는 와이드 앵글 인트라 예측 모드들을 나타낸 도면이다.
도 16은 수직 방향 파티셔닝 및 수평 방향 파티셔닝의 일 예를 나타낸 도면이다.
도 17은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
도 18은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
도 19는 코딩 블록의 인트라 예측 모드에 기초하여, 코딩 블록의 분할 형태가 결정되는 예를 나타낸 도면이다.
도 20은 코딩 블록의 분할 양상을 설명하기 위한 도면이다.
도 21은 서브 블록별로 예측 부호화 모드가 상이하게 설정되는 예를 나타낸 도면이다.
도 22는 PDPC의 적용 양상을 나타낸 도면이다.
도 23 및 도 24는 제2 변환이 수행될 서브 블록을 나타낸 도면이다.
도 25는 현재 블록의 변환 타입이 결정되는 예를 설명하기 위한 도면이다.
도 26은 서브 블록의 변환 타입을 결정하는 예를 나타낸 도면이다.
도 27은 서브 블록들의 잔차 계수가 0로 설정되는 예를 설명하기 위한 도면이다.
도 28은 비트스트림을 통해 시그날링되는 정보에 기초하여, 변환 및/또는 양자화가 수행된 서브 블록의 위치가 특정되는 예를 나타낸 것이다.
도 29는 블록 강도를 결정하는 과정을 나타낸 흐름도이다.
도 30은 기 정의된 필터 후보들을 나타낸다.
이하에서는 도면을 참조하여 본 발명의 실시예를 상세히 설명한다.
영상의 부호화 및 복호화는 블록 단위로 수행된다. 일 예로, 코딩 블록, 변환 블록, 또는 예측 블록에 대해, 변환, 양자화, 예측, 인루프 필터링, 또는 복원 등의 부호화/복호화 처리가 수행될 수 있다.
이하, 부호화/복호화 대상인 블록을 '현재 블록'이라 호칭하기로 한다. 일 예로, 현재 블록은 현재 부호화/복호화 처리 단계에 따라, 코딩 블록, 변환 블록, 또는 예측 블록을 나타낼 수 있다.
아울러, 본 명세서에서 사용되는 용어 '유닛'은 특정 부호화/복호화 프로세스를 수행하기 위한 기본 단위를 나타내고, '블록'은 소정 크기의 샘플 어레이를 나타내는 것으로 이해될 수 있다. 별도의 설명이 없는 한, '블록'과 '유닛'은 동등한 의미로 사용될 수 있다. 일 예로, 후술되는 실시예에서, 코딩 블록과 코딩 유닛은 상호 동등한 의미를 갖는 것으로 이해될 수 있다.
도 1은 본 발명의 일 실시예에 따른 영상 부호화기(인코더기)의 블록도이다.
도 1을 참조하면, 영상 부호화 장치(100)는 픽쳐 분할부(110), 예측부(120, 125), 변환부(130), 양자화부(135), 재정렬부(160), 엔트로피 부호화부(165), 역양자화부(140), 역변환부(145), 필터부(150) 및 메모리(155)를 포함할 수 있다.
도 1에 나타난 각 구성부들은 영상 부호화 장치에서 서로 다른 특징적인 기능들을 나타내기 위해 독립적으로 도시한 것으로, 각 구성부들이 분리된 하드웨어나 하나의 소프트웨어 구성단위로 이루어짐을 의미하지 않는다. 즉, 각 구성부는 설명의 편의상 각각의 구성부로 나열하여 포함한 것으로 각 구성부 중 적어도 두 개의 구성부가 합쳐져 하나의 구성부로 이루어지거나, 하나의 구성부가 복수개의 구성부로 나뉘어져 기능을 수행할 수 있고 이러한 각 구성부의 통합된 실시예 및 분리된 실시예도 본 발명의 본질에서 벗어나지 않는 한 본 발명의 권리범위에 포함된다.
또한, 일부의 구성 요소는 본 발명에서 본질적인 기능을 수행하는 필수적인 구성 요소는 아니고 단지 성능을 향상시키기 위한 선택적 구성 요소일 수 있다. 본 발명은 단지 성능 향상을 위해 사용되는 구성 요소를 제외한 본 발명의 본질을 구현하는데 필수적인 구성부만을 포함하여 구현될 수 있고, 단지 성능 향상을 위해 사용되는 선택적 구성 요소를 제외한 필수 구성 요소만을 포함한 구조도 본 발명의 권리범위에 포함된다.
픽쳐 분할부(110)는 입력된 픽쳐를 적어도 하나의 처리 단위로 분할할 수 있다. 이때, 처리 단위는 예측 단위(Prediction Unit: PU)일 수도 있고, 변환 단위(Transform Unit: TU)일 수도 있으며, 부호화 단위(Coding Unit: CU)일 수도 있다. 픽쳐 분할부(110)에서는 하나의 픽쳐에 대해 복수의 부호화 단위, 예측 단위 및 변환 단위의 조합으로 분할하고 소정의 기준(예를 들어, 비용 함수)으로 하나의 부호화 단위, 예측 단위 및 변환 단위 조합을 선택하여 픽쳐를 부호화 할 수 있다.
예를 들어, 하나의 픽쳐는 복수개의 부호화 단위로 분할될 수 있다. 픽쳐에서 부호화 단위를 분할하기 위해서는 쿼드 트리 구조(Quad Tree Structure)와 같은 재귀적인 트리 구조를 사용할 수 있는데 하나의 영상 또는 최대 크기 부호화 단위(largest coding unit)를 루트로 하여 다른 부호화 단위로 분할되는 부호화 유닛은 분할된 부호화 단위의 개수만큼의 자식 노드를 가지고 분할될 수 있다. 일정한 제한에 따라 더 이상 분할되지 않는 부호화 단위는 리프 노드가 된다. 즉, 하나의 코딩 유닛에 대하여 정방형 분할만이 가능하다고 가정하는 경우, 하나의 부호화 단위는 최대 4개의 다른 부호화 단위로 분할될 수 있다.
이하, 본 발명의 실시예에서는 부호화 단위는 부호화를 수행하는 단위의 의미로 사용할 수도 있고, 복호화를 수행하는 단위의 의미로 사용할 수도 있다.
예측 단위는 하나의 부호화 단위 내에서 동일한 크기의 적어도 하나의 정사각형 또는 직사각형 등의 형태를 가지고 분할된 것일 수도 있고, 하나의 부호화 단위 내에서 분할된 예측 단위 중 어느 하나의 예측 단위가 다른 하나의 예측 단위와 상이한 형태 및/또는 크기를 가지도록 분할된 것일 수도 있다.
부호화 단위를 기초로 인트라 예측을 수행하는 예측 단위를 생성시 최소 부호화 단위가 아닌 경우, 복수의 예측 단위 NxN 으로 분할하지 않고 인트라 예측을 수행할 수 있다.
예측부(120, 125)는 인터 예측을 수행하는 인터 예측부(120)와 인트라 예측을 수행하는 인트라 예측부(125)를 포함할 수 있다. 예측 단위에 대해 인터 예측을 사용할 것인지 또는 인트라 예측을 수행할 것인지를 결정하고, 각 예측 방법에 따른 구체적인 정보(예컨대, 인트라 예측 모드, 모션 벡터, 참조 픽쳐 등)를 결정할 수 있다. 이때, 예측이 수행되는 처리 단위와 예측 방법 및 구체적인 내용이 정해지는 처리 단위는 다를 수 있다. 예컨대, 예측의 방법과 예측 모드 등은 예측 단위로 결정되고, 예측의 수행은 변환 단위로 수행될 수도 있다. 생성된 예측 블록과 원본 블록 사이의 잔차값(잔차 블록)은 변환부(130)로 입력될 수 있다. 또한, 예측을 위해 사용한 예측 모드 정보, 모션 벡터 정보 등은 잔차값과 함께 엔트로피 부호화부(165)에서 부호화되어 복호화기에 전달될 수 있다. 특정한 부호화 모드를 사용할 경우, 예측부(120, 125)를 통해 예측 블록을 생성하지 않고, 원본 블록을 그대로 부호화하여 복호화부에 전송하는 것도 가능하다.
인터 예측부(120)는 현재 픽쳐의 이전 픽쳐 또는 이후 픽쳐 중 적어도 하나의 픽쳐의 정보를 기초로 예측 단위를 예측할 수도 있고, 경우에 따라서는 현재 픽쳐 내의 부호화가 완료된 일부 영역의 정보를 기초로 예측 단위를 예측할 수도 있다. 인터 예측부(120)는 참조 픽쳐 보간부, 모션 예측부, 움직임 보상부를 포함할 수 있다.
참조 픽쳐 보간부에서는 메모리(155)로부터 참조 픽쳐 정보를 제공받고 참조 픽쳐에서 정수 화소 이하의 화소 정보를 생성할 수 있다. 휘도 화소의 경우, 1/4 화소 단위로 정수 화소 이하의 화소 정보를 생성하기 위해 필터 계수를 달리하는 DCT 기반의 8탭 보간 필터(DCT-based Interpolation Filter)가 사용될 수 있다. 색차 신호의 경우 1/8 화소 단위로 정수 화소 이하의 화소 정보를 생성하기 위해 필터 계수를 달리하는 DCT 기반의 4탭 보간 필터(DCT-based Interpolation Filter)가 사용될 수 있다.
모션 예측부는 참조 픽쳐 보간부에 의해 보간된 참조 픽쳐를 기초로 모션 예측을 수행할 수 있다. 모션 벡터를 산출하기 위한 방법으로 FBMA(Full search-based Block Matching Algorithm), TSS(Three Step Search), NTS(New Three-Step Search Algorithm) 등 다양한 방법이 사용될 수 있다. 모션 벡터는 보간된 화소를 기초로 1/2 또는 1/4 화소 단위의 모션 벡터값을 가질 수 있다. 모션 예측부에서는 모션 예측 방법을 다르게 하여 현재 예측 단위를 예측할 수 있다. 모션 예측 방법으로 스킵(Skip) 방법, 머지(Merge) 방법, AMVP(Advanced Motion Vector Prediction) 방법, 인트라 블록 카피(Intra Block Copy) 방법 등 다양한 방법이 사용될 수 있다.
인트라 예측부(125)는 현재 픽쳐 내의 화소 정보인 현재 블록 주변의 참조 픽셀 정보를 기초로 예측 단위를 생성할 수 있다. 현재 예측 단위의 주변 블록이 인터 예측을 수행한 블록이어서, 참조 픽셀이 인터 예측을 수행한 픽셀일 경우, 인터 예측을 수행한 블록에 포함되는 참조 픽셀을 주변의 인트라 예측을 수행한 블록의 참조 픽셀 정보로 대체하여 사용할 수 있다. 즉, 참조 픽셀이 가용하지 않는 경우, 가용하지 않은 참조 픽셀 정보를 가용한 참조 픽셀 중 적어도 하나의 참조 픽셀로 대체하여 사용할 수 있다.
인트라 예측에서 예측 모드는 참조 픽셀 정보를 예측 방향에 따라 사용하는 방향성 예측 모드와 예측을 수행시 방향성 정보를 사용하지 않는 비방향성 모드를 가질 수 있다. 휘도 정보를 예측하기 위한 모드와 색차 정보를 예측하기 위한 모드가 상이할 수 있고, 색차 정보를 예측하기 위해 휘도 정보를 예측하기 위해 사용된 인트라 예측 모드 정보 또는 예측된 휘도 신호 정보를 활용할 수 있다.
인트라 예측을 수행할 때 예측 단위의 크기와 변환 단위의 크기가 동일할 경우, 예측 단위의 좌측에 존재하는 픽셀, 좌측 상단에 존재하는 픽셀, 상단에 존재하는 픽셀을 기초로 예측 단위에 대한 인트라 예측을 수행할 수 있다. 그러나 인트라 예측을 수행할 때 예측 단위의 크기와 변환 단위의 크기가 상이할 경우, 변환 단위를 기초로 한 참조 픽셀을 이용하여 인트라 예측을 수행할 수 있다. 또한, 최소 부호화 단위에 대해서만 NxN 분할을 사용하는 인트라 예측을 사용할 수 있다.
인트라 예측 방법은 예측 모드에 따라 참조 화소에 AIS(Adaptive Intra Smoothing) 필터를 적용한 후 예측 블록을 생성할 수 있다. 참조 화소에 적용되는 AIS 필터의 종류는 상이할 수 있다. 인트라 예측 방법을 수행하기 위해 현재 예측 단위의 인트라 예측 모드는 현재 예측 단위의 주변에 존재하는 예측 단위의 인트라 예측 모드로부터 예측할 수 있다. 주변 예측 단위로부터 예측된 모드 정보를 이용하여 현재 예측 단위의 예측 모드를 예측하는 경우, 현재 예측 단위와 주변 예측 단위의 인트라 예측 모드가 동일하면 소정의 플래그 정보를 이용하여 현재 예측 단위와 주변 예측 단위의 예측 모드가 동일하다는 정보를 전송할 수 있고, 만약 현재 예측 단위와 주변 예측 단위의 예측 모드가 상이하면 엔트로피 부호화를 수행하여 현재 블록의 예측 모드 정보를 부호화할 수 있다.
또한, 예측부(120, 125)에서 생성된 예측 단위를 기초로 예측을 수행한 예측 단위와 예측 단위의 원본 블록과 차이값인 잔차값(Residual) 정보를 포함하는 잔차 블록이 생성될 수 있다. 생성된 잔차 블록은 변환부(130)로 입력될 수 있다.
변환부(130)에서는 원본 블록과 예측부(120, 125)를 통해 생성된 예측 단위의 잔차값(residual)정보를 포함한 잔차 블록을 DCT(Discrete Cosine Transform), DST(Discrete Sine Transform), KLT와 같은 변환 방법을 사용하여 변환시킬 수 있다. 잔차 블록을 변환하기 위해 DCT를 적용할지, DST를 적용할지 또는 KLT를 적용할지는 잔차 블록을 생성하기 위해 사용된 예측 단위의 인트라 예측 모드 정보를 기초로 결정할 수 있다.
양자화부(135)는 변환부(130)에서 주파수 영역으로 변환된 값들을 양자화할 수 있다. 블록에 따라 또는 영상의 중요도에 따라 양자화 계수는 변할 수 있다. 양자화부(135)에서 산출된 값은 역양자화부(140)와 재정렬부(160)에 제공될 수 있다.
재정렬부(160)는 양자화된 잔차값에 대해 계수값의 재정렬을 수행할 수 있다.
재정렬부(160)는 계수 스캐닝(Coefficient Scanning) 방법을 통해 2차원의 블록 형태 계수를 1차원의 벡터 형태로 변경할 수 있다. 예를 들어, 재정렬부(160)에서는 지그-재그 스캔(Zig-Zag Scan)방법을 이용하여 DC 계수부터 고주파수 영역의 계수까지 스캔하여 1차원 벡터 형태로 변경시킬 수 있다. 변환 단위의 크기 및 인트라 예측 모드에 따라 지그-재그 스캔 대신 2차원의 블록 형태 계수를 열 방향으로 스캔하는 수직 스캔, 2차원의 블록 형태 계수를 행 방향으로 스캔하는 수평 스캔이 사용될 수도 있다. 즉, 변환 단위의 크기 및 인트라 예측 모드에 따라 지그-재그 스캔, 수직 방향 스캔 및 수평 방향 스캔 중 어떠한 스캔 방법이 사용될지 여부를 결정할 수 있다.
엔트로피 부호화부(165)는 재정렬부(160)에 의해 산출된 값들을 기초로 엔트로피 부호화를 수행할 수 있다. 엔트로피 부호화는 예를 들어, 지수 골롬(Exponential Golomb), CAVLC(Context-Adaptive Variable Length Coding), CABAC(Context-Adaptive Binary Arithmetic Coding)과 같은 다양한 부호화 방법을 사용할 수 있다.
엔트로피 부호화부(165)는 재정렬부(160) 및 예측부(120, 125)로부터 부호화 단위의 잔차값 계수 정보 및 블록 타입 정보, 예측 모드 정보, 분할 단위 정보, 예측 단위 정보 및 전송 단위 정보, 모션 벡터 정보, 참조 프레임 정보, 블록의 보간 정보, 필터링 정보 등 다양한 정보를 부호화할 수 있다.
엔트로피 부호화부(165)에서는 재정렬부(160)에서 입력된 부호화 단위의 계수값을 엔트로피 부호화할 수 있다.
역양자화부(140) 및 역변환부(145)에서는 양자화부(135)에서 양자화된 값들을 역양자화하고 변환부(130)에서 변환된 값들을 역변환한다. 역양자화부(140) 및 역변환부(145)에서 생성된 잔차값(Residual)은 예측부(120, 125)에 포함된 움직임 추정부, 움직임 보상부 및 인트라 예측부를 통해서 예측된 예측 단위와 합쳐져 복원 블록(Reconstructed Block)을 생성할 수 있다.
필터부(150)는 디블록킹 필터, 오프셋 보정부, ALF(Adaptive Loop Filter)중 적어도 하나를 포함할 수 있다.
디블록킹 필터는 복원된 픽쳐에서 블록간의 경계로 인해 생긴 블록 왜곡을 제거할 수 있다. 디블록킹을 수행할지 여부를 판단하기 위해 블록에 포함된 몇 개의 열 또는 행에 포함된 픽셀을 기초로 현재 블록에 디블록킹 필터 적용할지 여부를 판단할 수 있다. 블록에 디블록킹 필터를 적용하는 경우 필요한 디블록킹 필터링 강도에 따라 강한 필터(Strong Filter) 또는 약한 필터(Weak Filter)를 적용할 수 있다. 또한 디블록킹 필터를 적용함에 있어 수직 필터링 및 수평 필터링 수행시 수평 방향 필터링 및 수직 방향 필터링이 병행 처리되도록 할 수 있다.
오프셋 보정부는 디블록킹을 수행한 영상에 대해 픽셀 단위로 원본 영상과의 오프셋을 보정할 수 있다. 특정 픽쳐에 대한 오프셋 보정을 수행하기 위해 영상에 포함된 픽셀을 일정한 수의 영역으로 구분한 후 오프셋을 수행할 영역을 결정하고 해당 영역에 오프셋을 적용하는 방법 또는 각 픽셀의 에지 정보를 고려하여 오프셋을 적용하는 방법을 사용할 수 있다.
ALF(Adaptive Loop Filtering)는 필터링한 복원 영상과 원래의 영상을 비교한 값을 기초로 수행될 수 있다. 영상에 포함된 픽셀을 소정의 그룹으로 나눈 후 해당 그룹에 적용될 하나의 필터를 결정하여 그룹마다 차별적으로 필터링을 수행할 수 있다. ALF를 적용할지 여부에 관련된 정보는 휘도 신호는 부호화 단위(Coding Unit, CU) 별로 전송될 수 있고, 각각의 블록에 따라 적용될 ALF 필터의 모양 및 필터 계수는 달라질 수 있다. 또한, 적용 대상 블록의 특성에 상관없이 동일한 형태(고정된 형태)의 ALF 필터가 적용될 수도 있다.
메모리(155)는 필터부(150)를 통해 산출된 복원 블록 또는 픽쳐를 저장할 수 있고, 저장된 복원 블록 또는 픽쳐는 인터 예측을 수행 시 예측부(120, 125)에 제공될 수 있다.
도 2는 본 발명의 일 실시예에 따른 영상 복호화기(디코더기)의 블록도이다.
도 2를 참조하면, 영상 복호화기(200)는 엔트로피 복호화부(210), 재정렬부(215), 역양자화부(220), 역변환부(225), 예측부(230, 235), 필터부(240), 메모리(245)가 포함될 수 있다.
영상 부호화기에서 영상 비트스트림이 입력된 경우, 입력된 비트스트림은 영상 부호화기와 반대의 절차로 복호화될 수 있다.
엔트로피 복호화부(210)는 영상 부호화기의 엔트로피 부호화부에서 엔트로피 부호화를 수행한 것과 반대의 절차로 엔트로피 복호화를 수행할 수 있다. 예를 들어, 영상 부호화기에서 수행된 방법에 대응하여 지수 골롬(Exponential Golomb), CAVLC(Context-Adaptive Variable Length Coding), CABAC(Context-Adaptive Binary Arithmetic Coding)과 같은 다양한 방법이 적용될 수 있다.
엔트로피 복호화부(210)에서는 부호화기에서 수행된 인트라 예측 및 인터 예측에 관련된 정보를 복호화할 수 있다.
재정렬부(215)는 엔트로피 복호화부(210)에서 엔트로피 복호화된 비트스트림을 부호화부에서 재정렬한 방법을 기초로 재정렬을 수행할 수 있다. 1차원 벡터 형태로 표현된 계수들을 다시 2차원의 블록 형태의 계수로 복원하여 재정렬할 수 있다. 재정렬부(215)에서는 부호화부에서 수행된 계수 스캐닝에 관련된 정보를 제공받고 해당 부호화부에서 수행된 스캐닝 순서에 기초하여 역으로 스캐닝하는 방법을 통해 재정렬을 수행할 수 있다.
역양자화부(220)는 부호화기에서 제공된 양자화 파라미터와 재정렬된 블록의 계수값을 기초로 역양자화를 수행할 수 있다.
역변환부(225)는 영상 부호화기에서 수행한 양자화 결과에 대해 변환부에서 수행한 변환 즉, DCT, DST, 및 KLT에 대해 역변환 즉, 역 DCT, 역 DST 및 역 KLT를 수행할 수 있다. 역변환은 영상 부호화기에서 결정된 전송 단위를 기초로 수행될 수 있다. 영상 복호화기의 역변환부(225)에서는 예측 방법, 현재 블록의 크기 및 예측 방향 등 복수의 정보에 따라 변환 기법(예를 들어, DCT, DST, KLT)이 선택적으로 수행될 수 있다.
예측부(230, 235)는 엔트로피 복호화부(210)에서 제공된 예측 블록 생성 관련 정보와 메모리(245)에서 제공된 이전에 복호화된 블록 또는 픽쳐 정보를 기초로 예측 블록을 생성할 수 있다.
전술한 바와 같이 영상 부호화기에서의 동작과 동일하게 인트라 예측을 수행시 예측 단위의 크기와 변환 단위의 크기가 동일할 경우, 예측 단위의 좌측에 존재하는 픽셀, 좌측 상단에 존재하는 픽셀, 상단에 존재하는 픽셀을 기초로 예측 단위에 대한 인트라 예측을 수행하지만, 인트라 예측을 수행시 예측 단위의 크기와 변환 단위의 크기가 상이할 경우, 변환 단위를 기초로 한 참조 픽셀을 이용하여 인트라 예측을 수행할 수 있다. 또한, 최소 부호화 단위에 대해서만 NxN 분할을 사용하는 인트라 예측을 사용할 수도 있다.
예측부(230, 235)는 예측 단위 판별부, 인터 예측부 및 인트라 예측부를 포함할 수 있다. 예측 단위 판별부는 엔트로피 복호화부(210)에서 입력되는 예측 단위 정보, 인트라 예측 방법의 예측 모드 정보, 인터 예측 방법의 모션 예측 관련 정보 등 다양한 정보를 입력 받고 현재 부호화 단위에서 예측 단위를 구분하고, 예측 단위가 인터 예측을 수행하는지 아니면 인트라 예측을 수행하는지 여부를 판별할 수 있다. 인터 예측부(230)는 영상 부호화기에서 제공된 현재 예측 단위의 인터 예측에 필요한 정보를 이용해 현재 예측 단위가 포함된 현재 픽쳐의 이전 픽쳐 또는 이후 픽쳐 중 적어도 하나의 픽쳐에 포함된 정보를 기초로 현재 예측 단위에 대한 인터 예측을 수행할 수 있다. 또는, 현재 예측 단위가 포함된 현재 픽쳐 내에서 기-복원된 일부 영역의 정보를 기초로 인터 예측을 수행할 수도 있다.
인터 예측을 수행하기 위해 부호화 단위를 기준으로 해당 부호화 단위에 포함된 예측 단위의 모션 예측 방법이 스킵 모드(Skip Mode), 머지 모드(Merge 모드), 모션 벡터 예측 모드(AMVP Mode), 인트라 블록 카피 모드 중 어떠한 방법인지 여부를 판단할 수 있다.
인트라 예측부(235)는 현재 픽쳐 내의 화소 정보를 기초로 예측 블록을 생성할 수 있다. 예측 단위가 인트라 예측을 수행한 예측 단위인 경우, 영상 부호화기에서 제공된 예측 단위의 인트라 예측 모드 정보를 기초로 인트라 예측을 수행할 수 있다. 인트라 예측부(235)에는 AIS(Adaptive Intra Smoothing) 필터, 참조 화소 보간부, DC 필터를 포함할 수 있다. AIS 필터는 현재 블록의 참조 화소에 필터링을 수행하는 부분으로써 현재 예측 단위의 예측 모드에 따라 필터의 적용 여부를 결정하여 적용할 수 있다. 영상 부호화기에서 제공된 예측 단위의 예측 모드 및 AIS 필터 정보를 이용하여 현재 블록의 참조 화소에 AIS 필터링을 수행할 수 있다. 현재 블록의 예측 모드가 AIS 필터링을 수행하지 않는 모드일 경우, AIS 필터는 적용되지 않을 수 있다.
참조 화소 보간부는 예측 단위의 예측 모드가 참조 화소를 보간한 화소값을 기초로 인트라 예측을 수행하는 예측 단위일 경우, 참조 화소를 보간하여 정수값 이하의 화소 단위의 참조 화소를 생성할 수 있다. 현재 예측 단위의 예측 모드가 참조 화소를 보간하지 않고 예측 블록을 생성하는 예측 모드일 경우 참조 화소는 보간되지 않을 수 있다. DC 필터는 현재 블록의 예측 모드가 DC 모드일 경우 필터링을 통해서 예측 블록을 생성할 수 있다.
복원된 블록 또는 픽쳐는 필터부(240)로 제공될 수 있다. 필터부(240)는 디블록킹 필터, 오프셋 보정부, ALF를 포함할 수 있다.
영상 부호화기로부터 해당 블록 또는 픽쳐에 디블록킹 필터를 적용하였는지 여부에 대한 정보 및 디블록킹 필터를 적용하였을 경우, 강한 필터를 적용하였는지 또는 약한 필터를 적용하였는지에 대한 정보를 제공받을 수 있다. 영상 복호화기의 디블록킹 필터에서는 영상 부호화기에서 제공된 디블록킹 필터 관련 정보를 제공받고 영상 복호화기에서 해당 블록에 대한 디블록킹 필터링을 수행할 수 있다.
오프셋 보정부는 부호화시 영상에 적용된 오프셋 보정의 종류 및 오프셋 값 정보 등을 기초로 복원된 영상에 오프셋 보정을 수행할 수 있다.
ALF는 부호화기로부터 제공된 ALF 적용 여부 정보, ALF 계수 정보 등을 기초로 부호화 단위에 적용될 수 있다. 이러한 ALF 정보는 특정한 파라메터 셋에 포함되어 제공될 수 있다.
메모리(245)는 복원된 픽쳐 또는 블록을 저장하여 참조 픽쳐 또는 참조 블록으로 사용할 수 있도록 할 수 있고 또한 복원된 픽쳐를 출력부로 제공할 수 있다.
도 3은 본 발명의 일 실시예에 따른 기본 코딩 트리 유닛을 도시한 도면이다.
최대 크기의 코딩 블록을 코딩 트리 블록이라 정의할 수 있다. 하나의 픽처는 복수개의 코딩 트리 유닛(Coding Tree Unit, CTU)으로 분할된다. 코딩 트리 유닛은 최대 크기의 코딩 유닛으로, LCU (Largest Coding Unit)라 호칭될 수도 있다. 도 3은 하나의 픽처가 복수개의 코딩 트리 유닛으로 분할된 예를 나타낸 것이다.
코딩 트리 유닛의 크기는 픽처 레벨 또는 시퀀스 레벨에서 정의될 수 있다. 이를 위해, 코딩 트리 유닛의 크기를 나타내는 정보가 픽처 파라미터 세트 또는 시퀀스 파라미터 세트를 통해 시그날링될 수 있다.
일 예로, 시퀀스 내 전체 픽처에 대한 코딩 트리 유닛의 크기가 128x128로 설정될 수 있다. 또는, 픽처 레벨에서 128x128 또는 256x256 중 어느 하나를 코딩 트리 유닛의 크기로 결정할 수 있다. 일 예로, 제1 픽처에서는 코딩 트리 유닛의 크기가 128x128로 설정되고, 제2 픽처에서는 코딩 트리 유닛의 크기가 256x256으로 설정될 수 있다.
코딩 트리 유닛을 분할하여, 코딩 블록을 생성할 수 있다. 코딩 블록은 부호화/복호화 처리를 위한 기본 단위를 나타낸다. 일 예로, 코딩 블록 별로 예측 또는 변환이 수행되거나, 코딩 블록 별로 예측 부호화 모드가 결정될 수 있다. 여기서, 예측 부호화 모드는 예측 영상을 생성하는 방법을 나타낸다. 일 예로, 예측 부호화 모드는 화면 내 예측(Intra Prediction, 인트라 예측), 화면 간 예측(Inter Prediction, 인터 예측), 현재 픽처 참조(Current Picture Referencing, CPR, 또는 인트라 블록 카피(Intra Block Copy, IBC)) 또는 복합 예측(Combined Prediction)을 포함할 수 있다. 코딩 블록에 대해, 인트라 예측, 인터 예측, 현재 픽처 참조 또는 복합 예측 중 적어도 하나의 예측 부호화 모드를 이용하여, 코딩 블록에 대한 예측 블록을 생성할 수 있다.
현재 블록의 예측 부호화 모드를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 상기 정보는 예측 부호화 모드가 인트라 모드인지 또는 인터 모드인지 여부를 나타내는 1비트 플래그일 수 있다. 현재 블록의 예측 부호화 모드가 인터 모드로 결정된 경우에 한하여, 현재 픽처 참조 또는 복합 예측이 이용 가능할 수 있다.
현재 픽처 참조는 현재 픽처를 참조 픽처로 설정하고, 현재 픽처 내 이미 부호화/복호화가 완료된 영역으로부터 현재 블록의 예측 블록을 획득하기 위한 것이다. 여기서, 현재 픽처는 현재 블록을 포함하는 픽처를 의미한다. 현재 블록에 현재 픽처 참조가 적용되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 상기 정보는 1비트의 플래그일 수 있다. 상기 플래그가 참인 경우, 현재 블록의 예측 부호화 모드는 현재 픽처 참조로 결정되고, 상기 플래그가 거짓인 경우, 현재 블록의 예측 모드는 인터 예측으로 결정될 수 있다.
또는, 참조 픽처 인덱스를 기초로, 현재 블록의 예측 부호화 모드가 결정될 수 있다. 일 예로, 참조 픽처 인덱스가 현재 픽처를 가리키는 경우, 현재 블록의 예측 부호화 모드는 현재 픽처 참조로 결정될 수 있다. 참조 픽처 인덱스가 현재 픽처가 아닌 다른 픽처를 가리키는 경우, 현재 블록의 예측 부호화 모드는 인터 예측으로 결정될 수 있다. 즉, 현재 픽처 참조는 현재 픽처 내 부호화/복호화가 완료된 영역의 정보를 이용한 예측 방법이고, 인터 예측은 부호화/복호화가 완료된 다른 픽처의 정보를 이용한 예측 방법이다.
복합 예측은 인트라 예측, 인터 예측 및 현재 픽처 참조 중 둘 이상을 조합된 부호화 모드를 나타낸다. 일 예로, 복합 예측이 적용되는 경우, 인트라 예측, 인터 예측 또는 현재 픽처 참조 중 어느 하나를 기초로 제1 예측 블록이 생성되고, 다른 하나를 기초로 제2 예측 블록이 생성될 수 있다. 제1 예측 블록 및 제2 예측 블록이 생성되면, 제1 예측 블록 및 제2 예측 블록의 평균 연산 또는 가중합 연산을 통해 최종 예측 블록이 생성될 수 있다. 복합 예측이 적용되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그일 수 있다.
도 4는 코딩 블록의 다양한 분할 형태를 나타낸 도면이다.
코딩 블록은 쿼드 트리 분할, 바이너리 트리 분할 또는 트리플 트리 분할을 기초로 복수의 코딩 블록들로 분할될 수 있다. 분할된 코딩 블록도 다시 쿼드 트리 분할, 바이터리 트리 분할 또는 트리플 트리 분할을 기초로 다시 복수의 코딩 블록들로 분할될 수 있다.
쿼드 트리 분할은 현재 블록을 4개의 블록들로 분할하는 분할 기법을 나타낸다. 쿼드 트리 분할의 결과, 현재 블록은 4개의 정방 형태 파티션들로 분할될 수 있다 (도 4의 (a) 'SPLIT_QT' 참조).
바이너리 트리 분할은 현재 블록을 2개의 블록들로 분할하는 분할 기법을 나타낸다. 수직 방향을 따라(즉, 현재 블록을 가로지르는 수직선을 이용) 현재 블록을 두개의 블록들로 분할하는 것을 수직 방향 바이너리 트리 분할이라 호칭할 수 있고, 수평 방향을 따라(즉, 현재 블록을 가로지르는 수평선을 이용) 현재 블록을 두개의 블록들로 분할하는 것을 수평 방향 바이너리 트리 분할이라 호칭할 수 있다. 바이너리 트리 분할 결과, 현재 블록은 2개의 비정방 형태 파티션들로 분할될 수 있다. 도 4의 (b) 'SPLIT_BT_VER'는 수직 방향 바이너리 트리 분할 결과를 나타낸 것이고, 도 4의 (c) 'SPLIT_BT_HOR'는 수평 방향 바이너리 트리 분할 결과를 나타낸 것이다.
트리플 트리 분할은 현재 블록을 3개의 블록들로 분할하는 분할 기법을 나타낸다. 수직 방향을 따라(즉, 현재 블록을 가로지르는 두개의 수직선을 이용) 현재 블록을 세개의 블록들로 분할하는 것을 수직 방향 트리플 트리 분할이라 호칭할 수 있고, 수평 방향을 따라(즉, 현재 블록을 가로지르는 두개의 수평선을 이용) 현재 블록을 세개의 블록들로 분할하는 것을 수평 방향 트리플 트리 분할이라 호칭할 수 있다. 트리플 트리 분할 결과, 현재 블록은 3개의 비정방 형태 파티션들로 분할될 수 있다. 이때, 현재 블록의 중앙에 위치하는 파티션의 너비/높이는 다른 파티션들의 너비/높이 대비 2배일 수 있다. 도 4의 (d) 'SPLIT_TT_VER'는 수직 방향 트리플 트리 분할 결과를 나타낸 것이고, 도 4의 (e) 'SPLIT_TT_HOR'는 수평 방향 트리플 트리 분할 결과를 나타낸 것이다.
코딩 트리 유닛의 분할 횟수를 분할 깊이(Partitioning Depth)라 정의할 수 있다. 시퀀스 또는 픽처 레벨에서 코딩 트리 유닛의 최대 분할 깊이가 결정될 수 있다. 이에 따라, 시퀀스 또는 필처별로 코딩 트리 유닛의 최대 분할 깊이가 상이할 수 있다.
또는, 분할 기법들 각각에 대한 최대 분할 깊이를 개별적으로 결정할 수 있다. 일 예로, 쿼드 트리 분할이 허용되는 최대 분할 깊이는 바이너리 트리 분할 및/또는 트리플 트리 분할이 허용되는 최대 분할 깊이와 상이할 수 있다.
부호화기는 현재 블록의 분할 형태 또는 분할 깊이 중 적어도 하나를 나타내는 정보를 비트스트림을 통해 시그날링할 수 있다. 복호화기는 비트스트림으로부터 파싱되는 상기 정보에 기초하여 코딩 트리 유닛의 분할 형태 및 분할 깊이를 결정할 수 있다.
도 5는 코딩 트리 유닛의 분할 양상을 예시한 도면이다.
쿼드 트리 분할, 바이너리 트리 분할 및/또는 트리플 트리 분할 등의 분할 기법을 이용하여 코딩 블록을 분할하는 것을 멀티 트리 분할(Multi Tree Partitioning)이라 호칭할 수 있다.
코딩 블록에 멀티 트리 분할을 적용하여 생성되는 코딩 블록들을 하위 코딩 블록들이라 호칭할 수 있다. 코딩 블록의 분할 깊이가 k인 경우, 하위 코딩 블록들의 분할 깊이는 k+1로 설정된다.
반대로, 분할 깊이가 k+1인 코딩 블록들에 대해, 분할 깊이가 k인 코딩 블록을 상위 코딩 블록이라 호칭할 수 있다.
현재 코딩 블록의 분할 타입은 상위 코딩 블록의 분할 형태 또는 이웃 코딩 블록의 분할 타입 중 적어도 하나를 기초로 결정될 수 있다. 여기서, 이웃 코딩 블록은 현재 코딩 블록에 인접하는 것으로, 현재 코딩 블록의 상단 이웃 블록, 좌측 이웃 블록, 또는 좌측 상단 코너에 인접하는 이웃 블록 중 적어도 하나를 포함할 수 있다. 여기서, 분할 타입은, 쿼드 트리 분할 여부, 바이너리 트리 분할 여부, 바이너리 트리 분할 방향, 트리플 트리 분할 여부, 또는 트리플 트리 분할 방향 중 적어도 하나를 포함할 수 있다.
코딩 블록의 분할 형태를 결정하기 위해, 코딩 블록이 분할되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그 'split_cu_flag'로, 상기 플래그가 참인 것은, 머리 트리 분할 기법에 의해 코딩 블록이 분할됨을 나타낸다.
split_cu_flag가 참인 경우, 코딩 블록이 쿼드 트리 분할되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그 split_qt_flag로, 상기 플래그가 참인 경우, 코딩 블록은 4개의 블록들로 분할될 수 있다.
일 예로, 도 5에 도시된 예에서는, 코딩 트리 유닛이 쿼드 트리 분할됨에 따라, 분할 깊이가 1인 4개의 코딩 블록들이 생성되는 것으로 도시되었다. 또한, 쿼드 트리 분할 결과로 생성된 4개의 코딩 블록들 중 첫번째 코딩 블록 및 네번째 코딩 블록에 다시 쿼드 트리 분할이 적용된 것으로 도시되었다. 그 결과, 분할 깊이가 2인 4개의 코딩 블록들이 생성될 수 있다.
또한, 분할 깊이가 2인 코딩 블록에 다시 쿼드 트리 분할을 적용함으로써, 분할 깊이가 3인 코딩 블록을 생성할 수 있다.
코딩 블록에 쿼드 트리 분할이 적용되지 않는 경우, 코딩 블록의 크기, 코딩 블록이 픽처 경계에 위치하는지 여부, 최대 분할 깊이 또는 이웃 블록의 분할 형태 중 적어도 하나를 고려하여, 상기 코딩 블록에 바이너리 트리 분할 또는 트리플 트리 분할을 수행할 것인지 여부를 결정할 수 있다. 상기 코딩 블록에 바이너리 트리 분할 또는 트리플 트리 분할이 수행되는 것으로 결정된 경우, 분할 방향을 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그 mtt_split_cu_vertical_flag일 수 있다. 상기 플래그에 기초하여, 분할 방향이 수직 방향인지 또는 수평 방향인지 여부가 결정될 수 있다. 추가로, 바이너리 트리 분할 또는 트리플 트리 분할 중 어느 것이 상기 코딩 블록에 적용되는지를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그 mtt_split_cu_binary_flag일 수 있다. 상기 플래그에 기초하여, 상기 코딩 블록에 바이너리 트리 분할이 적용되는지 또는 트리플 트리 분할이 적용되는지 여부가 결정될 수 있다.
일 예로, 도 5에 도시된 예에서는, 분할 깊이 1인 코딩 블록에 수직 방향 바이너리 트리 분할이 적용되고, 상기 분할 결과로 생성된 코딩 블록들 중 좌측 코딩 블록에는 수직 방향 트리플 트리 분할이 적용되고, 우측 코딩 블록에는 수직 방향 바이너리 트리 분할이 적용된 것으로 도시되었다.
인터 예측은 이전 픽처의 정보를 이용하여, 현재 블록을 예측하는 예측 부호화 모드이다. 일 예로, 이전 픽처 내 현재 블록과 동일한 위치의 블록(이하, 콜로케이티드 블록, Collocated block)을 현재 블록의 예측 블록으로 설정할 수 있다. 이하, 현재 블록과 동일한 위치의 블록을 기초로 생성된 예측 블록을 콜로케이티드 예측 블록(Collocated Prediction Block)이라 호칭하기로 한다.
반면, 이전 픽처에 존재한 오브젝트가 현재 픽처에서는 다른 위치로 이동하였다면, 오브젝트의 움직임을 이용하여 효과적으로 현재 블록을 예측할 수 있다. 예를 들어, 이전 픽처와 현재 픽처를 비교함으로써 오브젝트의 이동 방향 및 크기를 알 수 있다면, 오브젝트의 움직임 정보를 고려하여 현재 블록의 예측 블록(또는, 예측 영상)을 생성할 수 있다. 이하, 움직임 정보를 이용하여 생성된 예측 블록을 움직임 예측 블록이라 호칭할 수 있다.
현재 블록에서 예측 블록을 차분하여, 잔차 블록(residual block)을 생성할 수 있다. 이때, 오브젝트의 움직임이 존재하는 경우라면, 콜로케이티드 예측 블록 대신 움직임 예측 블록을 이용함으로써, 잔차 블록의 에너지를 줄이고, 이에 따라, 잔차 블록의 압축 성능을 향상시킬 수 있다.
위처럼, 움직임 정보를 이용하여 예측 블록을 생성하는 것을 움직임 보상 예측이라 호칭할 수 있다. 대부분의 인터 예측에서는 움직임 보상 예측에 기초하여 예측 블록을 생성할 수 있다.
움직임 정보는 모션 벡터, 참조 픽처 인덱스, 예측 방향 또는 양방향 가중치 인덱스 중 적어도 하나를 포함할 수 있다. 모션 벡터는 오브젝트의 이동 방향 및 크기를 나타낸다. 참조 픽처 인덱스는 참조 픽처 리스트에 포함된 참조 픽처들 중 현재 블록의 참조 픽처를 특정한다. 예측 방향은 단방향 L0 예측, 단방향 L1 예측 또는 양방향 예측(L0 예측 및 L1 예측) 중 어느 하나를 가리킨다. 현재 블록의 예측 방향에 따라, L0 방향의 움직인 정보 또는 L1 방향의 움직임 정보 중 적어도 하나가 이용될 수 있다. 양방향 가중치 인덱스는 L0 예측 블록에 적용되는 가중치 및 L1 예측 블록에 적용되는 가중치를 특정한다.
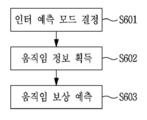
도 6은 본 발명의 일 실시예에 따른 인터 예측 방법의 흐름도이다.
도 6을 참조하면, 인터 예측 방법은, 현재 블록의 인터 예측 모드를 결정하는 단계(S601), 결정된 인터 예측 모드에 따라 현재 블록의 움직임 정보를 획득하는 단계(S602) 및 획득된 움직임 정보에 기초하여, 현재 블록에 대한 움직임 보상 예측을 수행하는 단계(S603)를 포함한다.
여기서, 인터 예측 모드는 현재 블록의 움직임 정보를 결정하기 위한 다양한 기법들을 나타내는 것으로, 병진(Translation) 움직임 정보를 이용하는 인터 예측 모드와, 어파인(Affine) 움직임 정보를 이용하는 인터 예측 모드를 포함할 수 있다. 일 예로, 병진 움직임 정보를 이용하는 인터 예측 모드는, 머지 모드 및 모션 벡터 예측 모드를 포함하고, 어파인 움직임 정보를 이용하는 인터 예측 모드는 어파인 머지 모드 및 어파인 모션 벡터 예측 모드를 포함할 수 있다. 현재 블록의 움직임 정보는, 인터 예측 모드에 따라, 현재 블록에 이웃하는 이웃 블록 또는 비트스트림으로부터 파싱되는 정보를 기초로 결정될 수 있다.
일 예로, 현재 블록의 움직임 정보는 현재 블록과 동일한 픽처에 포함된 공간적 이웃 블록 또는 현재 블록과 상이한 픽처에 포함된 콜로케이티드 블록의 움직임 정보를 기초로 유도될 수 있다. 공간적 이웃 블록은, 현재 블록의 상단에 인접하는 이웃 블록, 좌측에 인접하는 이웃 블록, 좌측 상단 코너에 인접하는 이웃 블록, 우측 상단 코너에 인접하는 이웃 블록 또는 좌측 하단 코너에 인접하는 이웃 블록 중 적어도 하나를 포함한다. 콜로케이티드 블록은 콜 픽처 내 현재 블록과 동일한 위치 및 크기를 가질 수 있다. 일 예로, 도 7은 콜로케이티드 블록을 나타낸 도면이다. 콜 픽처는 참조 픽처들 중 어느 하나를 가리키는 인덱스 정보에 의해 특정될 수 있다.
현재 블록의 움직임 벡터의 정밀도는 복수의 움직임 벡터 정밀도 후보들 중에서 어느 하나로 결정될 수 있다. 일 예로, 움직임 벡터 정밀도 후보는 옥토펠, 쿼터펠, 하프펠, 정수펠, 2정수펠 또는 4-정수펠 중 적어도 하나를 포함할 수 있다. 움직임 벡터 정밀도 후보의 개수 또는 종류는 시퀀스, 슬라이스 또는 블록 단위로 결정될 수 있다. 일 예로, 움직임 벡터 정밀도 후보의 개수 또는 종류를 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다. 또는, 현재 블록의 인터 예측 모드 또는 어파인 모션 모델의 사용 여부에 기초하여 움직임 벡터 정밀도 후보의 개수 또는 종류가 결정될 수 있다. 복수의 움직임 벡터 정밀도 후보 중 어느 하나를 특정하기 위한 정보가 비트스트림을 통해 시그날링될 수도 있다.
인트라 예측은 현재 블록 주변에 부호화/복호화가 완료된 복원 샘플을 이용하여, 현재 블록을 예측하는 것이다. 이때, 현재 블록의 인트라 예측에는, 인루프 필터가 적용되기 전의 복원 샘플이 이용될 수 있다.
인트라 예측 기법은 매트릭스(Matrix)에 기반한 인트라 예측 및 주변 복원 샘플과의 방향성을 고려한 일반 인트라 예측을 포함한다. 현재 블록의 인트라 예측 기법을 지시하는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그일 수 있다. 또는, 현재 블록의 위치, 크기, 형태 또는 이웃 블록의 인트라 예측 기법 중 적어도 하나에 기초하여, 현재 블록의 인트라 예측 기법을 결정할 수 있다. 일 예로, 현재 블록이 픽처 바운더리를 걸쳐 존재하는 경우, 현재 블록에는 매트릭트에 기반한 인트라 예측이 적용되지 않도록 설정될 수 있다.
매트릭스에 기반한 인트라 예측은, 부호화기 및 복호화기에서 기 저장된 매트릭스와, 현재 블록 주변의 복원 샘플 사이의 행렬 곱에 기반하여, 현재 블록의 예측 블록을 획득하는 방법이다. 기 저장된 복수개의 매트릭스들 중 어느 하나를 특정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다. 복호화기는 상기 정보 및 현재 블록의 크기에 기초하여, 현재 블록의 인트라 예측을 위한 매트릭스를 결정할 수 있다.
일반 인트라 예측은, 비방향성 인트라 예측 모드 또는 방향성 인트라 예측 모드에 기초하여, 현재 블록에 대한 예측 블록을 획득하는 방법이다. 이하, 도면을 참조하여, 일반 인트라 예측에 기초한 인트라 예측 수행 과정에 대해 보다 상세히 살펴보기로 한다.
도 8은 본 발명의 일 실시예에 따른, 인트라 예측 방법의 흐름도이다.
현재 블록의 참조 샘플 라인을 결정할 수 있다(S801). 참조 샘플 라인은 현재 블록의 상단 및/또는 좌측으로부터 k번째 떨어진 라인에 포함된 참조 샘플들의 집합을 의미한다. 참조 샘플은 현재 블록 주변 부호화/복호화가 완료된 복원 샘플로부터 유도될 수 있다.
복수의 참조 샘플 라인들 중 현재 블록의 참조 샘플 라인을 식별하는 인덱스 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 현재 블록의 참조 샘플 라인을 특정하기 위한 인덱스 정보 intra_luma_ref_idx가 비트스트림을 통해 시그날링될 수 있다. 상기 인덱스 정보는 코딩 블록 단위로 시그날링될 수 있다.
복수의 참조 샘플 라인들은, 현재 블록에 상단 및/또는 좌측 1번째 라인, 2번째 라인, 3번째 라인 또는 4번째 라인 중 적어도 하나를 포함할 수 있다. 복수개의 참조 샘플 라인들 중 현재 블록의 상단에 인접하는 행 및 현재 블록의 좌측에 인접하는 열로 구성된 참조 샘플 라인을 인접 참조 샘플 라인이라 호칭하고, 그 이외의 참조 샘플 라인을 비인접 참조 샘플 라인이라 호칭할 수도 있다.
도 9는 참조 샘플 라인들을 나타낸 도면이다.
도 9에서는 현재 블록에 인접하는 행/열로 구성된 하나의 인접 참조 샘플 라인과 현재 블록에 인접하지 않는 행/열로 구성된 세개의 비인접 참조 샘플 라인들을 도시하였다.
복수의 참조 샘플 라인들 중 일부만이 현재 블록의 참조 샘플 라인으로 선택될 수 있다. 일 예로, 도 9에 도시된 참조 샘플 라인들 중 제2 비인접 참조 샘플 라인을 제외한 잔여 참조 샘플 라인들을 후보 참조 샘플 라인들로 설정할 수 있다. 표 1은 후보 참조 샘플 라인들 각각에 할당되는 인덱스를 나타낸 것이다.
| 인덱스 (intra_luma_ref_idx) | 참조 샘플 라인 |
| 0 | 인접 참조 샘플 라인 |
| 1 | 제1 비인접 참조 샘플 라인 |
| 2 | 제2 비인접 참조 샘플 라인 |
설명한 것 보다 더 많은 수의 후보 참조 샘플 라인들을 설정하거나, 더 적은 수의 후보 참조 샘플 라인들을 설정할 수도 있다. 또한, 후보 참조 샘플 라인으로 설정되는 비인접 참조 샘플 라인의 개수 또는 위치는 설명한 예에 한정되지 아니한다. 일 예로, 제1 비인접 참조 샘플 라인 및 제3 비인접 참조 샘플 라인을 후보 참조 샘플 라인들로 설정하거나, 제2 비인접 참조 샘플 라인 및 제3 비인접 참조 샘플 라인을 후보 참조 샘플 라인들로 설정할 수도 있다. 또는, 제1 비인접 참조 샘플 라인, 제2 비인접 참조 샘플 라임 및 제3 비인접 참조 샘플 라인을 모두 후보 참조 샘플 라인들로 설정할 수도 있다.후보 참조 샘플 라인들의 개수 또는 종류는 현재 블록의 크기, 형태, 위치, 서브 블록으로의 분할 여부 또는 인트라 예측 모드 중 적어도 하나에 기초하여 결정될 수 있다.
현재 블록의 위치, 크기, 형태 또는 이웃 블록의 예측 부호화 모드 중 적어도 하나에 기초하여, 현재 블록의 참조 샘플 라인을 결정할 수도 있다. 일 예로, 현재 블록이 픽처, 타일, 슬라이스 또는 코딩 트리 유닛의 경계에 접하는 경우, 인접 참조 샘플 라인을 현재 블록의 참조 샘플 라인으로 결정할 수 있다.
또는, 현재 블록이 비정방형인 경우, 인접 참조 샘플 라인을 현재 블록의 참조 샘플 라인으로 결정할 수 있다. 또는, 현재 블록의 너비 및 높이비가 문턱값 이상 또는 문턱값 이하인 경우, 인접 참조 샘플 라인을 현재 블록의 참조 샘플 라인으로 결정할 수 있다.
참조 샘플 라인은 현재 블록의 상단에 위치하는 상단 참조 샘플들 및 현재 블록의 좌측에 위치하는 좌측 참조 샘플들을 포함할 수 있다. 상단 참조 샘플들 및 좌측 참조 샘플들은 현재 블록 주변의 복원 샘플들로부터 유도될 수 있다. 상기 복원 샘플들은 인루프 필터가 적용되기 이전 상태일 수 있다.
참조 샘플 라인에 포함된 참조 샘플들의 개수는 참조 샘플 라인과 참조 샘플 라인 사이의 거리에 기초하여 결정될 수 있다. 일 예로, 현재 블록과의 거리가 i인 참조 샘플 라인에 포함된 참조 샘플들의 개수가 현재 블록과의 거리가 i-1인 참조 샘플 라인에 포함된 참조 샘플들의 개수보다 더 큰 값을 가질 수 있다. 이에 따라, 비인접 참조 샘플 라인에 포함된 참조 샘플들의 개수는 인접 참조 샘플 라인에 포함된 참조 샘플들의 개수보다 큰 값을 가질 수 있다.
현재 블록과의 거리가 i인 비인접 참조 샘플 라인에 포함된 참조 샘플들의 개수와 인접 참조 샘플 라인에 포함된 참조 샘플들의 개수 차분을 참조 샘플 개수 오프셋이라 정의할 수 있다. 이때, 현재 블록의 상단에 위치하는 상단 참조 샘플들의 개수 차분을 offsetX[i]라 정의하고, 현재 블록의 좌측에 위치하는 좌측 참조 샘플들의 개수 차분을 offsetY[i]라 정의할 수 있다. offsetX 및 offsetY는 현재 블록과 비인접 참조 샘플 라인의 거리에 기초하여 결정될 수 있다. 일 예로, offsetX 및 offsetY는 i의 정수배로 설정될 수 있다. 일 예로, offsetX[i] 및 offset[i]는 2i일 수 있다.
또는, 현재 블록의 너비 및 높이비에 기초하여 참조 샘플 개수 오프셋을 결정할 수도 있다. 수학식 1은 현재 블록의 너비 및 높이비를 수치화하는 일 예를 나타낸 것이다.
수학식 1에 표현된 것과 다른 방법으로 현재 블록의 너비 및 높이비를 수치화하는 것 역시 가능하다.
현재 블록의 너비 및 높이비를 기초로 offsetX 및 offsetY의 값을 결정할 수 있다. 예를 들어, whRatio의 값이 1보다 큰 경우에는 offsetX의 값을 offsetY의 값보다 크게 설정할 수 있다. 일 예로, offsetX의 값은 1로 설정되고, offsetY의 값은 0으로 설정될 수 있다. 반면, whRatio의 값이 1보다 작은 경우에는 offsetX의 값보다 offsetY의 값을 더 크게 설정할 수 있다. 일 예로, offsetX의 값은 0으로 설정되고, offsetY의 값은 1로 설정될 수 있다.
x축 및 y축 좌표가 동일한 좌측 상단 참조 샘플 제외, 현재 블록과의 거리가 i인 비인접 참조 샘플 라인은 (refW + offsetX[i])개의 상단 참조 샘플들과 (refH + offsetY[i])개의 좌측 참조 샘플들로 구성될 수 있다. 여기서, refW 및 refH는 인접 참조 샘플 라인의 길이를 나타내는 것으로, 각각 다음의 수학식 2 및 3과 같이 설정될 수 있다.
수학식 2 및 수학식 3에서, nTbW는 인트라 예측이 수행되는 코딩 블록 또는 변환 블록의 너비를 나타내고, nTbH는 인트라 예측이 수행되는 코딩 블록 또는 변환 블록의 높이를 나타낸다.
결과적으로, 현재 블록과의 거리가 i인 참조 샘플 라인은 (refW + refH + offsetX[i] + offsetY[i] + 1)개의 참조 샘플들로 구성될 수 있다.
현재 블록의 인트라 예측 모드에 따라, 참조 샘플 라인에 속한 참조 샘플들 중 적어도 하나를 이용하여, 예측 샘플을 획득할 수 있다.
다음으로, 현재 블록의 인트라 예측 모드를 결정할 수 있다(S802). 현재 블록의 인트라 예측 모드는 비방향성 인트라 예측 모드 또는 방향성 인트라 예측 모드 중 적어도 하나가 현재 블록의 인트라 예측 모드로 결정될 수 있다. 비방향성 인트라 예측 모드는, 플래너 및 DC를 포함하고, 방향성 인트라 예측 모드는 좌하단 대각 방향부터 우상단 대각 방향까지 33개 또는 65개의 모드들을 포함한다.
도 10은 인트라 예측 모드들을 나타낸 도면이다.
도 10의 (a)는 35개의 인트라 예측 모드를 나타낸 것이고, 도 10의 (b)는 67개의 인트라 예측 모드들을 나타낸 것이다.
도 10에 도시된 것보다 더 많은 수 혹은 더 적은 수의 인트라 예측 모드들이 정의될 수도 있다.
현재 블록에 인접하는 이웃 블록의 인트라 예측 모드를 기초로, MPM(Most Probable Mode)을 설정할 수 있다. 여기서, 이웃 블록은, 현재 블록의 좌측에 인접하는 좌측 이웃 블록 및 현재 블록의 상단에 이웃하는 상단 이웃 블록을 포함할 수 있다. 현재 블록의 좌측 상단 샘플의 좌표를 (0, 0)이라 할 때, 좌측 이웃 블록은 (-1, 0), (-1, H-1) 또는 (-1, (H-1)/2) 위치의 샘플을 포함할 수 있다. 여기서, H는 현재 블록의 높이를 나타낸다. 상단 이웃 블록은 (0, -1), (W-1, -1) 또는 ((W-1)/2, -1) 위치의 샘플을 포함할 수 있다. 여기서, W는 현재 블록의 너비를 나타낸다.
이웃 블록이 일반 인트라 예측으로 부호화된 경우, 이웃 블록의 인트라 예측 모드에 기초하여 MPM을 유도할 수 있다. 구체적으로, 좌측 이웃 블록의 인트라 예측 모드를 변수 candIntraPredModeA로 설정하고, 상단 이웃 블록의 인트라 예측 모드를 변수 candIntraPredModeB로 설정할 수 있다.
이때, 이웃 블록이 이용 불가능한 경우(예컨대, 이웃 블록이 아직 부호화/복호화되지 않은 경우 또는 이웃 블록의 위치가 픽처 경계를 벗어난 경우), 이웃 블록이 매트릭스에 기반한 인트라 예측으로 부호화된 경우, 이웃 블록이 인터 예측으로 부호화된 경우 또는 이웃 블록이 현재 블록과 상이한 코딩 트리 유닛에 포함된 경우에 있어서, 이웃 블록의 인트라 예측 모드를 기초로 유도되는 변수 candIntraPredModeX (여기서, X는 A 또는 B)를 디폴트 모드로 설정할 수 있다. 여기서, 디폴트 모드는 플래너, DC, 수직 방향 모드 또는 수평 방향 모드 중 적어도 하나를 포함할 수 있다.
또는, 이웃 블록이 매트릭스에 기반한 인트라 예측으로 부호화된 경우, 매트릭스들 중 어느 하나를 특정하기 위한 인덱스 값에 대응하는 인트라 예측 모드를 candIntraPredModeX로 설정할 수 있다. 이를 위해, 매트릭스를 특정하기 위한 인덱스 값들과 인트라 예측 모드들의 매핑 관계를 나타내는 룩업 테이블이 부호화기 및 복호화기에 기 저장될 수 있다.
변수 candIntraPredModeA 및 변수 candIntraPredModeB에 기초하여, MPM들을 유도할 수 있다. 일 예로, candIntraPredModeA 및 candIntraPredModeB를 MPM으로 설정하거나, candIntraPredModeA 또는 candIntraPredModeB 중 큰 값 또는 작은 값과 유사한 인트라 예측 모드를 MPM으로 설정할 수 있다. 여기서, candIntraPredModeX (X는 A 또는 B)와 유사한 인트라 예측 모드는 candIntraPredModeX와 인덱스 차분값이 ±1 또는 ±2인 인트라 예측 모드일 수 있다.
MPM 리스트에 포함되는 MPM의 개수는 부호화기 및 복호화기에서 기 설정될 수 있다. 일 예로, MPM의 개수는, 3개, 4개, 5개 혹은 6개일 수 있다. 또는, MPM의 개수를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 또는, 이웃 블록의 예측 부호화 모드, 현재 블록의 크기, 형태 또는 참조 샘플 라인 인덱스 중 적어도 하나에 기초하여 MPM의 개수가 결정될 수 있다. 일 예로, 인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정된 경우에는 N개의 MPM들이 이용되는 반면, 비인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정된 경우에는 M개의 MPM들이 이용될 수 있다. M은 N보다 작은 자연수로, 일 예로, N은 6이고, M은 5, 4 또는 3일 수 있다. 이에 따라, 현재 블록의 참조 샘플 라인의 인덱스가 0이고, MPM 플래그가 참인 경우, 현재 블록의 인트라 예측 모드는 6개의 후보 인트라 예측 모드들 중 어느 하나로 결정되는 반면, 현재 블록의 참조 샘플 라인의 인덱스가 0보다 크고, MPM 플래그가 참인 경우, 현재 블록의 인트라 예측 모드는 5개의 후보 인트라 예측 모드들 중 어느 하나로 결정될 수 있다.
또는, 현재 블록의 참조 샘플 라인의 인덱스와 무관하게 고정된 개수(예컨대, 6개 또는 5개)의 MPM 후보를 사용할 수도 있다.
후술되는 실시예들에서는 MPM의 개수가 6개인 것으로 가정하고, 6개의 MPM들을 MPM[0], MPM[1], MPM[2], MPM[3], MPM[4] 및 MPM[5]라 호칭하기로 한다. MPM들의 개수가 6개보다 적은 실시예는, 후술되는 실시예들에서 설명하는 6개의 MPM들 중 일부만을 이용하여 구현될 수 있다. 또는, MPM들의 개수가 6개보다 많은 실시예는 후술되는 실시예들에서 설명하는 6개의 MPM들을 포함하여 구현될 수 있다.
MPM들의 초기값은 candIntraPredModeA와 candIntraPredModeA와 상이한 비방향성 인트라 예측 모드 또는 방향성 인트라 예측 모드로 설정될 수 있다. 여기서, MPM으로 설정될 수 있는 방향성 인트라 예측 모드는 수직 방향의 인트라 예측 모드, 수평 방향의 인트라 예측 모드, 좌하단 대각 방향의 인트라 예측 모드, 좌상단 대각 방향의 인트라 예측 모드 또는 우상단 대각 방향의 인트라 예측 모드 중 적어도 하나를 포함할 수 있다. 일 예로, MPM들의 초기값은 다음과 같이 설정될 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = (candIntraPredModeA == INTRA_PLANAR) ? INTRA_DC : INTRA_PLANAR
MPM[2] = INTRA_ANGULAR50
MPM[3] = INTRA_ANGULAR18
MPM[4] = INTRA_ANGULAR2
MPM[5] = INTRA_ANGULAR34
상술한 예에서 ((A) ? B : C)는 A에 개시된 조건이 참인 경우, B값을 리턴하고, A에 개시된 조건이 거짓인 경우 C값을 리턴하는 함수를 나타낸다.
candIntraPredModeA 및 candIntraPredModeB가 동일하고, candIntraPredModeA가 방향성 인트라 예측 모드인 경우, MPM[0]를 candIntraPredModeA로 설정하고, candIntraPredModeA와 유사한 인트라 예측 모드들을 MPM들로 설정할 수 있다. candIntraPredModeA와 유사한 인트라 예측 모드는 candIntraPredModeA와 인덱스 차분값이 ±1 또는 ±2인 인트라 예측 모드일 수 있다. candIntraPredModeA와 유사한 인트라 예측 모드를 유도하기 위해 모듈로 연산(%) 및 오프셋이 이용될 수 있다. 또한, 비방향성 인트라 예측 모드 또는 candIntraPredModeA와의 각도 차분이 기 정의된 값인 인트라 예측 모드 중 적어도 하나를 MPM으로 설정할 수 있다. 여기서, candIntraPredModeA와의 각도 차분이 기 정의된 값인 인트라 예측 모드는 candIntraPredModeA와 수직인 인트라 예측 모드 또는 candIntraPredModeA와 반대 방향인 인트라 예측 모드일 수 있다. 일 예로, MPM들은 다음과 같이 유도될 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = INTRA_PLANAR
MPM[2] = INTRA_DC
MPM[3] = 2 + ((candIntraPredModeA + 62) % 65)
MPM[4] = 2 + ((candIntraPredModeA - 1) % 65)
MPM[5] = 2 + ((candIntraPredModeA + 94) % 65)
MPM[3]은 (candIntraPredModeA - 1)에 대응하고, MPM[4]는 (candIntraPredModeA + 1)에 대응한다. MPM[5]는 candIntraPredModeA와 수직인 인트라 예측 모드를 나타낸다.
candIntraPredModeA와 candIntraPredModeB가 상이한 경우, candIntraPredModeA 및 candIntraPredModeB를 각각 MPM[0] 및 MPM[1]로 설정할 수 있다. 또는, candIntraPredA와 candIntraPredModeB를 비교하여, 최대값을 MPM[0]로 설정하고, 최소값을 MPM[1]로 설정할 수 있다. 이와 반대로, 최소값을 MPM[0]로 설정하고, 최대값을 MPM[1]로 설정하는 것도 가능하다.
이때, candIntraPredModeA와 candIntraPredModeB가 모두 방향성 인트라 예측 모드인 경우, 비방향성 인트라 예측 모드를 MPM으로 설정할 수 있다. 일 예로, 플래너 및 DC가 각각 MPM[2] 및 MPM[3]으로 설정될 수 있다.
추가로, candIntraPredModeA와 candIntraPredModeB 중 값이 큰 것 또는 작은 것과 유사한 인트라 예측 모드를 MPM으로 설정할 수 있다. candIntraPredModeX와 유사한 인트라 예측 모드는 candIntraPredModeX에 오프셋을 가산 또는 감산하여 유도될 수 있다. 이때, 오프셋의 최대 크기는 candIntraPredModeA 및 candIntraPredModeB 중 최대값과 최소값의 차분을 기초로 결정될 수 있다. 일 예로, 오프셋은, 1 또는 2와 같은 자연수 일 수 있다.
일 예로, MAX(candIntraPredModeA, candIntraPredModeB)에서 MIN(candIntraPredModeA, candIntraPredModeB)을 차분한 값이 64 또는 1이 아닌 경우, MPM[4] 및 MPM[5]는 다음과 같이 유도될 수 있다.
MPM[4] = 2 + ((MAX(MPM[0], MPM[1]) + 62) % 65
MPM[5] = 2 + ((MAX(MPM[0], MPM[1]) - 1) % 65
여기서, MAX(A, B) 함수는 A와 B 중 큰 값을 리턴하는 함수이고, MIN(A, B) 함수는 A와 B 중 작은 값을 리턴하는 함수이다. MPM[4]는 (MAX(MPM[0], MPM[1]) - 1)에 대응하고, MPM[5]는 (MAX(MPM[0], MPM[1]) + 1)에 대응한다. 반면, MAX(candIntraPredModeA, candIntraPredModeB)에서 MIN(candIntraPredModeA, candIntraPredModeB)을 차분한 값이 64 또는 1인 경우, MPM[4] 및 MPM[5]는 다음과 같이 유도될 수 있다.
MPM[4] = 2 + ((MAX(MPM[0], MPM[1]) + 61) % 65
MPM[5] = 2 + (MAX(MPM[0], MPM[1]) % 65
MPM[4]는 (MAX(MPM[0], MPM[1]) - 2)에 대응하고, MPM[5]는 (MAX(MPM[0], MPM[1]) + 2)에 대응한다.
candIntraPredModeA와 candIntraPredModeB 중 어느 하나는 방향성 인트라 예측 모드인 반면, 다른 하나는 비방향성 인트라 예측 모드인 경우, MIN(candIntraPredModeA, candIntrapredModeB)와 동일하지 않은 비방향성 인트라 예측 모드, MAX(candIntraPredModeA, candIntraPredModeB)와 유사한 방향성 인트라 예측 모드, 또는 MAX(candIntraPredModeA, candIntraPredModeB)와 각도 차분이 기 정의된 값인 인트라 예측 모드 중 적어도 하나를 MPM으로 설정할 수 있다. 일 예로, MPM[2] 내지 MPM[5]는 다음과 같이 유도될 수 있다.
MPM[2] = ! MIN(MPM[0], MPM[1])
MPM[3] = 2 + ((MAX(MPM[0], MPM[1]) + 62) % 65
MPM[4] = 2 + ((MAX(MPM[0], MPM[1]) - 1) % 65
MPM[5] = 2 + ((MAX(MPM[0], MPM[1]) + 94) % 65
MPM[2]는 MPM[0] 또는 MPM[1]과 동일하지 않은 비방향성 인트라 예측 모드를 나타낸다. 예컨대, MIN(MPM[0], MPM[1])이 DC인 경우, MPM[2]는 플래너로 설정되고, MIN(MPM[0], MPM[1])이 플래너인 경우, MPM[2]는 DC로 설정된다. MPM[3]은 ((MAX(MPM[0], MPM[1]) - 1)에 대응하고, MPM[4]는 (MAX(MPM[0], MPM[1]) + 1)에 대응한다. MPM[5]는 (MAX(MPM[0], MPM[1])와 수직인 인트라 예측 모드를 나타낸다. 위 열거된 예와 달리, (MAX(MPM[0], MPM[1])에 2를 가산 또는 감산하여 유도된 MPM을 MPM 리스트에 추가할 수도 있다.
candIntraPredA와 candIntraPredB 중 어느 하나는 비방향성 인트라 모드이고, 다른 하나는 방향성 인트라 예측 모드인 경우, 즉, candIntraPredA와 PredIntraPredB 중 어느 하나는 2보다 작고 다른 하나는 2와 같거나 큰 경우, candIntraPredA 및 candIntraPredB 중 최대값을 MPM으로 설정할 수 있다. 또한, 상기 최대값과 유사한 인트라 예측 모드 또는 상기 최대값에 수직인 인트라 예측 모드를 MPM으로 설정할 수 있다. 일 예로, MPM[0] 내지 MPM[5]는 다음과 같이 유도될 수 있다.
MPM[0] = MAX(candIntraPredA, candIntraPredB)
MPM[1] = INTRA_PLANAR
MPM[2] = INTRA_DC
MPM[3] = 2 + ((MAX(candIntraPredA, candIntraPredB) + 62) % 65
MPM[4] = 2 + ((MAX(candIntraPredA, candIntraPredB]) - 1) % 65
MPM[5] = 2 + ((MAX(candIntraPredA, candIntraPredB) + 94) % 65
MPM[3]은 ((MAX(candIntraPredA, candIntraPredB) - 1)에 대응하고, MPM[4]는 (MAX(candIntraPredA, candIntraPredB) + 1)에 대응한다. MPM[5]는 (MAX(candIntraPredA, candIntraPredB)와 수직인 인트라 예측 모드를 나타낸다. 위 열거된 예와 달리, (MAX(candIntraPredA, candIntraPredB)에 2를 가산 또는 감산하여 유도된 MPM을 MPM 리스트에 추가할 수도 있다.
현재 블록의 참조 샘플 라인의 인덱스를 고려하여, MPM들을 유도할 수 있다. 특히, 비인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정된 경우, 플래너 또는 DC와 같은 비방향성 예측 모드를 MPM으로 설정하지 않을 수 있다. 일 예로, MPM들의 초기값은 인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정되었는지 여부에 따라 다음과 같이 설정될 수 있다.
MPM[0] = (IntraLumaRefLineIdx == 0) ? candIntraPredModeA : INTRA_ANGULAR2
MPM[1] = (IntraLumaRefLineIdx == 0) ? (candIntraPredModeA : == INTRA_PLANAR ? INTRA_DC : INTRA_PLANAR) : INTRA_ANGULAR18
MPM[2] = INTRA_ANGULAR50
MPM[3] = (IntraLumaRefLineIdx == 0) ? INTRA_ANGULAR18 : INTRA_ANGULAR34
MPM[4] = (IntraLumaRefLineIdx == 0) ? INTRA_ANGULAR2 : INTRA_ANGULAR66
MPM[5] = (IntraLumaRefLineIdx == 0) ? INTRA_ANGULAR34 : INTRA_ANGULAR42
현재 블록의 참조 샘플 라인이 비인접 참조 샘플 라인이고, candIntraPredModeA 및 candIntraPredModeB가 모두 방향성 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = candIntraPredModeB
MPM[2] = INTRA_ANGULAR2
MPM[3] = INTRA_ANGULAR18
MPM[4] = INTRA_ANGULAR50
MPM[5] = INTRA_ANGULAR34
현재 블록의 참조 샘플 라인이 비인접 참조 샘플 라인이고, candIntraPredModeA 및 candIntraPredModeB 중 어느 하나는 비방향성 인트라 예측 모드이고, 다른 하나는 방향성 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = MAX(candIntraPredModeA, candIntraPredModeB)
MPM[1] = INTRA_ANGULAR2
MPM[2] = INTRA_ANGULAR18
MPM[3] = INTRA_ANGULAR50
MPM[4] = INTRA_ANGULAR34
MPM[5] = INTRA_ANGULAR66
복수의 MPM을 포함하는 MPM 리스트를 생성하고, 현재 블록의 인트라 예측 모드와 동일한 MPM이 MPM 리스트에 포함되어 있는지 여부를 나타내는 정보를 비트스트림을 통해 시그날링할 수 있다. 상기 정보는 1비트의 플래그로 MPM 플래그라 호칭될 수 있다. 상기 MPM 플래그가 현재 블록과 동일한 MPM이 MPM 리스트에 포함되어 있음을 나타내는 경우, MPM들 중 하나를 식별하는 인덱스 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 복수의 MPM들 중 어느 하나를 특정하는 인덱스 정보 mpm_idx가 비트스트림을 통해 시그날링될 수 있다. 상기 인덱스 정보에 의해 특정된 MPM이 현재 블록의 인트라 예측 모드로 설정될 수 있다. 상기 MPM 플래그가 현재 블록과 동일한 MPM이 MPM 리스트에 포함되어 있지 않음을 나타내는 경우, MPM들을 제외한 잔여 인트라 예측 모드들 중 어느 하나를 지시하는 잔여 모드 정보가 비트스트림을 통해 시그날링될 수 있다. 잔여 모드 정보는 MPM들을 제외한 잔여 인트라 예측 모드들에 인덱스를 재할당하였을 때, 현재 블록의 인트라 예측 모드에 대응되는 인덱스 값을 가리킨다. 복호화기에서는 MPM들을 오름차순으로 정렬하고, 잔여 모드 정보를 MPM들과 비교하여 현재 블록의 인트라 예측 모드를 결정할 수 있다. 일 예로, 잔여 모드 정보가 MPM과 같거나 작은 경우, 잔여 모드 정보에 1을 가산하여 현재 블록의 인트라 예측 모드를 유도할 수 있다.
현재 블록의 인트라 예측 모드 유도 시, MPM들 중 일부와 잔여 모드 정보에 대한 비교는 생략될 수 있다. 일 예로, MPM들 중 비방향성 인트라 예측 모드인 MPM 들은 비교 대상에서 제외될 수 있다. 비방향성 인트라 예측 모드들이 MPM들로 설정된 경우, 잔여 모드 정보는 방향성 인트라 예측 모드를 가리킴이 명확하므로, 비방향성 인트라 예측 모드들을 제외한 잔여 MPM들과 잔여 모드 정보와의 비교를 통해 현재 블록의 인트라 예측 모드를 유도할 수 있다. 비방향성 인트라 예측 모드들을 비교 대상으로 제외하는 대신, 잔여 모드 정보에 비방향성 인트라 예측 모드들의 개수를 가산한 뒤, 그 결과값을 잔여 MPM들과 비교할 수 있다.
디폴트 모드를 MPM으로 설정하는 대신, 현재 블록의 인트라 예측 모드가 디폴트 모드인지 여부를 나타내는 정보를 비트스트림을 통해 시그날링할 수 있다. 상기 정보는 1비트의 플래그이고, 상기 플래그를 디폴트 모드 플래그라 호칭할 수 있다. 상기 디폴트 모드 플래그는 MPM 플래그가 현재 블록과 동일한 MPM이 MPM 리스트에 포함되어 있음을 나타내는 경우에 한하여 시그날링될 수 있다. 상술한 바와 같이, 디폴트 모드는, 플래너, DC, 수직 방향 모드 또는 수평 방향 모드 중 적어도 하나를 포함할 수 있다. 일 예로, 플래너가 디폴트 모드로 설정된 경우, 디폴트 모드 플래그는 현재 블록의 인트라 예측 모드가 플래너인지 여부를 지시할 수 있다. 디폴트 모드 플래그가 현재 블록의 인트라 예측 모드가 디폴트 모드가 아님을 가리키는 경우, 인덱스 정보에 의해 지시되는 MPM들 중 하나를 현재 블록의 인트라 예측 모드로 설정할 수 있다.
디폴트 모드 플래그가 이용되는 경우, 디폴트 모드와 동일한 인트라 예측 모드는 MPM으로 설정되지 않도록 설정될 수 있다. 일 예로, 디폴트 모드 플래그가 현재 블록의 인트라 예측 모드가 플래너인지 여부를 지시하는 경우, 상술한 6개의 MPM들 중 플래너에 해당하는 MPM을 다른 모드로 치환하거나, 플래너에 해당하는 MPM을 제외한 5개의 MPM들을 이용하여, 현재 블록의 인트라 예측 모드를 유도할 수 있다.
복수개의 인트라 예측 모드들이 디폴트 모드들로 설정된 경우, 디폴트 모드들 중 어느 하나를 지시하는 인덱스 정보가 더 시그날링될 수 있다. 현재 블록의 인트라 예측 모드는 상기 인덱스 정보가 가리키는 디폴트 모드로 설정될 수 있다.
현재 블록의 참조 샘플 라인의 인덱스가 0이 아닌 경우에는 디폴트 모드를 이용하지 못하도록 설정할 수 있다. 일 예로, 비인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정된 경우, DC 모드 또는 플래너 모드와 같은 비방향성 인트라 예측 모드를 사용하지 않도록 설정할 수 있다. 이에 따라, 참조 샘플 라인의 인덱스가 0이 아닌 경우에는 디폴트 모드 플래그를 시그날링하지 않고, 상기 디폴트 모드 플래그의 값을 기 정의된 값(즉, 거짓)으로 설정할 수 있다.
현재 블록의 인트라 예측 모드가 결정되면, 결정된 인트라 예측 모드를 기초로, 현재 블록에 대한 예측 샘플들을 획득할 수 있다(S803).
DC 모드가 선택된 경우, 참조 샘플들의 평균값을 기초로, 현재 블록에 대한 예측 샘플들이 생성된다. 구체적으로, 예측 블록 내 전체 샘플들의 값은 참조 샘플들의 평균값을 기초로 생성될 수 있다. 평균값은, 현재 블록의 상단에 위치하는 상단 참조 샘플들 및 현재 블록의 좌측에 위치하는 좌측 참조 샘플들 중 적어도 하나를 이용하여 유도될 수 있다.
현재 블록의 형태에 따라, 평균값을 유도하는데 이용되는 참조 샘플들의 개수 또는 범위가 달라질 수 있다. 일 예로, 현재 블록이 너비가 높이보다 큰 비정방형 블록인 경우, 상단 참조 샘플들만을 이용하여 평균값을 계산할 수 있다. 반면, 현재 블록이 너비가 높이보다 작은 비정방형 블록인 경우, 좌측 참조 샘플들만을 이용하여 평균값을 계산할 수 있다. 즉, 현재 블록의 너비 및 높이가 상이한 경우, 길이가 더 긴 쪽에 인접하는 참조 샘플들만을 이용하여 평균값을 계산할 수 있다. 또는, 현재 블록의 너비와 높이 비율에 기초하여, 상단 참조 샘플들만을 이용하여 평균값을 계산할 것인지 여부 또는 좌측 참조 샘플들만을 이용하여 평균값을 계산할 것인지 여부를 결정할 수 있다.
플래너 모드가 선택된 경우, 수평 방향 예측 샘플과 수직 방향 예측 샘플을 이용하여, 예측 샘플을 획득할 수 있다. 여기서, 수평 방향 예측 샘플은, 예측 샘플과 동일한 수평선상에 위치하는 좌측 참조 샘플 및 우측 참조 샘플을 기초로 획득되고, 수직 방향 예측 샘플은, 예측 샘플과 동일한 수직선상에 위치하는 상단 참조 샘플 및 하단 참조 샘플을 기초로 획득된다. 여기서, 우측 참조 샘플은, 현재 블록의 우측 상단 코너에 인접하는 참조 샘플을 복사하여 생성되고, 하단 참조 샘플은, 현재 블록의 좌측 하단 코너에 인접하는 참조 샘플을 복사하여 생성될 수 있다. 수평 방향 예측 샘플은 좌측 참조 샘플 및 우측 참조 샘플의 가중합 연산을 기초로 획득되고, 수직 방향 예측 샘플은 상단 참조 샘플 및 하단 참조 샘플의 가중합 연산을 기초로 획득될 수 있다. 이때, 각 참조 샘플에 부여되는 가중치는 예측 샘플의 위치에 따라 결정될 수 있다. 예측 샘플은 수평 방향 예측 샘플 및 수직 방향 예측 샘플의 평균 연산 또는 가중합 연산을 기초로 획득될 수 있다. 가중합 연산이 수행되는 경우, 예측 샘플의 위치에 기초하여 수평 방향 예측 샘플 및 수직 방향 예측 샘플에 부여되는 가중치를 결정할 수 있다.
방향성 예측 모드가 선택되는 경우, 선택된 방향성 예측 모드의 예측 방향(또는 예측 각도)을 나타내는 파라미터를 결정할 수 있다. 하기 표 2는 인트라 예측 모드 별 인트라 방향 파라미터 intraPredAng를 나타낸 것이다.
| PredModeIntra IntraPredAng |
1 - |
2 32 |
3 26 |
4 21 |
5 17 |
6 13 |
7 9 |
| PredModeIntraIntraPredAng | 8 5 |
9 2 |
10 0 |
11 -2 |
12 -5 |
13 -9 |
14 -13 |
| PredModeIntraIntraPredAng | 15 -17 |
16 -21 |
17 -26 |
18 -32 |
19 -26 |
20 -21 |
21 -17 |
| PredModeIntraIntraPredAng | 22 -13 |
23 -9 |
24 -5 |
25 -2 |
26 0 |
27 2 |
28 5 |
| PredModeIntraIntraPredAng | 29 9 |
30 13 |
31 17 |
32 21 |
33 26 |
34 32 |
표 2는 35개의 인트라 예측 모드가 정의되어 있을 때, 인덱스가 2 내지 34 중 어느 하나인 인트라 예측 모드들 각각의 인트라 방향 파라미터를 나타낸다. 33개보다 더 많은 방향성 인트라 예측 모드가 정의되어 있는 경우, 표 2를 보다 세분화하여, 방향성 인트라 예측 모드 각각의 인트라 방향 파라미터를 설정할 수 있다.현재 블록의 상단 참조 샘플들 및 좌측 참조 샘플들을 일렬로 배열한 뒤, 인트라 방향 파라미터의 값을 기초로, 예측 샘플을 획득할 수 있다. 이때, 인트라 방향 파라미터의 값이 음수인 경우, 좌측 참조 샘플들과 상단 참조 샘플들을 일렬로 배열할 수 있다.
도 11 및 도 12는 참조 샘플들을 일렬로 배열하는 일차원 배열의 예시를 나타낸 도면이다.
도 11은 참조 샘플들을 수직 방향으로 배열하는 수직 방향 일차원 배열의 예시를 나타낸 것이고, 도 12는 참조 샘플들을 수평 방향으로 배열하는 수평 방향 일차원 배열의 예시를 나타낸 것이다. 35개의 인트라 예측 모드가 정의된 경우를 가정하여, 도 11 및 도 12의 실시예를 설명한다.
인트라 예측 모드 인덱스가 11 내지 18 중 어느 하나인 경우, 상단 참조 샘플들을 반시계 방향으로 회전한 수평 방향 일차원 배열을 적용하고, 인트라 예측 모드 인덱스가 19 내지 25 중 어느 하나인 경우, 좌측 참조 샘플들을 시계 방향으로 회전한 수직 방향 일차원 배열을 적용할 수 있다. 참조 샘플들을 일렬로 배열함에 있어서, 인트라 예측 모드 각도를 고려할 수 있다.
인트라 방향 파라미터에 기초하여, 참조 샘플 결정 파라미터를 결정할 수 있다. 참조 샘플 결정 파라미터는 참조 샘플을 특정하기 위한 참조 샘플 인덱스 및 참조 샘플에 적용되는 가중치를 결정하기 위한 가중치 파라미터를 포함할 수 있다.
참조 샘플 인덱스 iIdx 및 가중치 파라미터 ifact는 각각 다음의 수학식 4 및 5를 통해 획득될 수 있다.
수학식 4 및 5에서 Pang는 인트라 방향 파라미터를 나타낸다. 참조 샘플 인덱스 iIdx에 의해 특정되는 참조 샘플은 정수 펠(Integer pel)에 해당한다.
예측 샘플을 유도하기 위해, 적어도 하나 이상의 참조 샘플을 특정할 수 있다. 구체적으로, 예측 모드의 기울기를 고려하여, 예측 샘플을 유도하는데 이용되는 참조 샘플의 위치를 특정할 수 있다. 일 예로, 참조 샘플 인덱스 iIdx를 이용하여, 예측 샘플을 유도하는데 이용되는 참조 샘플을 특정할 수 있다.
이때, 인트라 예측 모드의 기울기가 하나의 참조 샘플로는 표현되지 않는 경우, 복수의 참조 샘플들을 보간하여 예측 샘플을 생성할 수 있다. 일 예로, 인트라 예측 모드의 기울기가 예측 샘플과 제1 참조 샘플 사이의 기울기 및 예측 샘플과 제2 참조 샘플 사이의 기울기 사이의 값인 경우, 제1 참조 샘플 및 제2 참조 샘플을 보간하여 예측 샘플을 획득할 수 있다. 즉, 인트라 예측 각도를 따르는 앵귤러 라인(Angular Line)이 정수 펠에 위치한 참조 샘플을 지나지 않는 경우, 상기 앵귤러 라인이 지나는 위치의 좌우 또는 상하에 인접 위치하는 참조 샘플들을 보간하여 예측 샘플을 획득할 수 있다.
하기 수학식 6은 참조 샘플들을 기초로, 예측 샘플을 획득하는 예를 나타낸 것이다.
수학식 6에서, P는 예측 샘플을 나타내고, Ref_1D은 일차원 배열된 참조 샘플들 중 어느 하나를 나타낸다. 이때, 참조 샘플의 위치는 예측 샘플의 위치 (x, y) 및 참조 샘플 인덱스 iIdx에 의해 결정될 수 있다.
인트라 예측 모드의 기울기가 하나의 참조 샘플로 표현 가능한 경우, 가중치 파라미터 ifact는 0으로 설정된다. 이에 따라, 수학식 6은 다음 수학식 7과 같이 간소화될 수 있다.
복수의 인트라 예측 모드에 기초하여 현재 블록에 대한 인트라 예측을 수행할 수도 있다. 일 예로, 예측 샘플별로 인트라 예측 모드를 유도하고, 각각의 예측 샘플에 할당된 인트라 예측 모드에 기초하여 예측 샘플을 유도할 수 있다.
또는, 영역 별로 인트라 예측 모드를 유도하고, 각각의 영역에 할당된 인트라 에측 모드에 기초하여 각 영역에 대한 인트라 예측을 수행할 수 있다. 여기서, 상기 영역은 적어도 하나의 샘플을 포함할 수 있다. 상기 영역의 크기 또는 형태 중 적어도 하나는 현재 블록의 크기, 형태 또는 인트라 예측 모드 중 적어도 하나에 기초하여 적응적으로 결정될 수 있다. 또는, 부호화기 및 복호화기에서 현재 블록의 크기 또는 형태와는 독립적으로 영역의 크기 또는 형태 중 적어도 하나가 기 정의되어 있을 수 있다.
또는, 복수의 인트라 예측 각각을 기초로 인트라 예측을 수행하고, 복수회의 인트라 예측을 통해 획득된 복수의 예측 샘플들의 평균 연산 또는 가중합 연산을 기초로 최종 예측 샘플을 유도할 수 있다. 일 예로, 제1 인트라 예측 모드를 기초로 인트라 예측을 수행하여 제1 예측 샘플을 획득하고, 제2 인트라 예측 모드를 기초로 인트라 예측을 수행하여 제2 예측 샘플을 획득할 수 있다. 이후, 제1 예측 샘플 및 제2 예측 샘플 사이의 평균 연산 또는 가중합 연산을 기초로, 최종 예측 샘플을 획득할 수 있다. 이때, 제1 예측 샘플 및 제2 에측 샘플 각각에 할당되는 가중치는, 제1 인트라 예측 모드가 비방향성/방향성 예측 모드인지 여부, 제2 인트라 예측 모드가 비방향성/방향성 예측 모드인지 여부 또는 이웃 블록의 인트라 예측 모드 중 적어도 하나를 고려하여 결정될 수 있다.
복수의 인트라 예측 모드들은 비방향성 인트라 예측 모드와 방향성 예측 모드의 조합, 방향성 예측 모드들의 조합 또는 비방향성 예측 모드들의 조합일 수 있다.
도 13은 방향성 인트라 예측 모드들이 x축과 평행한 직선과 형성하는 각도를 예시한 도면이다.
도 13에 나타난 예에서와 같이, 방향성 예측 모드들은 좌측 하단 대각 방향부터 우측 상단 대각 방향 사이에 존재할 수 있다. x축과 방향성 예측 모드가 형성하는 각도로 설명하면, 방향성 예측 모드들은, 45도 (좌측 하단 대각 방향) 부터, -135도 (우측 상단 대각 방향) 사이에 존재할 수 있다.
현재 블록이 비정방 형태인 경우, 현재 블록의 인트라 예측 모드에 따라, 인트라 예측 각도를 따르는 앵귤러 라인 상에 위치하는 참조 샘플들 중 예측 샘플에 보다 가까운 참조 샘플 대신 예측 샘플에 보다 먼 참조 샘플을 이용하여 예측 샘플을 유도하는 경우가 발생할 수 있다.
도 14는 현재 블록이 비정방 형태인 경우, 예측 샘플이 획득되는 양상을 나타낸 도면이다.
일 예로, 도 14의 (a)에 도시된 예에서와 같이, 현재 블록이 너비가 높이보다 큰 비정방형이고, 현재 블록의 인트라 예측 모드가 0도부터 45도 사이의 각도를 갖는 방향성 인트라 예측 모드인 것으로 가정한다. 위 경우, 현재 블록의 우측 열 부근의 예측 샘플 A를 유도할 때, 상기 각도를 따르는 앵귤러 모드 상에 위치하는 참조 샘플들 중 상기 예측 샘플과 가까운 상단 참조 샘플 T 대신 상기 예측 샘플과 먼 좌측 참조 샘플 L을 이용하는 경우가 발생할 수 있다.
다른 예로, 도 14의 (b)에 도시된 예에서와 같이, 현재 블록이 높이가 너비보다 큰 비정방형이고, 현재 블록의 인트라 예측 모드가 -90 도부터 -135도 사이인 방향성 인트라 예측 모드인 것으로 가정한다. 위 경우, 현재 블록의 하단 행 부근의 예측 샘플 A를 유도할 때, 상기 각도를 따르는 앵귤러 모드 상에 위치하는 참조 샘플들 중 상기 예측 샘플과 가까운 좌측 참조 샘플 L 대신 상기 예측 샘플과 먼 상단 참조 샘플 T를 이용하는 경우가 발생할 수 있다.
위와 같은 문제점을 해소하기 위해, 현재 블록이 비정방형인 경우, 현재 블록의 인트라 예측 모드를 반대 방향의 인트라 예측 모드로 치환할 수 있다. 이에 따라, 비정방형 블록에 대해서는 도 10에 도시된 방향성 예측 모드들 보다 더 큰 혹은 더 작은 각도를 갖는 방향성 예측 모드들을 사용할 수 있다. 이와 같은, 방향성 인트라 예측 모드를 와이드 앵글 인트라 예측 모드라 정의할 수 있다. 와이드 앵글 인트라 예측 모드는 45도 내지 -135도 범위에 속하지 않는 방향성 인트라 예측 모드를 나타낸다.
도 15는 와이드 앵글 인트라 예측 모드들을 나타낸 도면이다.
도 15에 도시된 예에서, 인덱스가 -1 부터 -14인 인트라 예측 모드들 및 인덱스가 67 부터 80 사이인 인트라 예측 모드들이 와이드 앵글 인트라 예측 모드들을 나타낸다.
도 15에서는 각도가 45도 보다 큰 14개의 와이드 앵글 인트라 예측 모드들(-1 부터 -14) 및 각도가 -135도 보다 작은 14개의 와이드 앵글 인트라 예측 모드들(67 부터 80)을 예시하였으나, 이보다 더 많은 수 또는 더 적은 수의 와이드 앵글 인트라 예측 모드들이 정의될 수 있다.
와이드 앵글 인트라 예측 모드가 사용되는 경우, 상단 참조 샘플들의 길이는 2W+1로 설정되고, 좌측 참조 샘플들의 길이는 2H+1로 설정될 수 있다.
와이드 앵글 인트라 예측 모드를 사용함에 따라, 도 14의 (a)에 도시된 샘플 A는 참조 샘플 T를 이용하여 예측되고, 도 14의 (b)에 도시된 샘플 A는 참조 샘플 L을 이용하여 예측될 수 있다.
기존 인트라 예측 모드들과 N개의 와이드 앵글 인트라 예측 모드들을 더해, 총 67 + N개의 인트라 예측 모드들을 사용할 수 있다. 일 예로, 표 3은 20개의 와이드 앵글 인트라 예측 모드가 정의된 경우, 인트라 예측 모드들의 인트라 방향 파라미터를 나타낸 것이다.
| PredModeIntra | -10 | -9 | -8 | -7 | -6 | -5 | -4 | -3 | -2 |
| intraPredAngle | 114 | 93 | 79 | 68 | 60 | 54 | 49 | 45 | 39 |
| PredModeIntra | -1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| intraPredAngle | 35 | 32 | 29 | 26 | 23 | 21 | 19 | 17 | 15 |
| PredModeIntra | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| intraPredAngle | 13 | 11 | 9 | 7 | 5 | 3 | 2 | 1 | 0 |
| PredModeIntra | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 |
| intraPredAngle | -1 | -2 | -3 | -5 | -7 | -9 | -11 | -13 | -15 |
| PredModeIntra | 28 | 29 | 30 | 31 | 32 | 33 | 34 | 35 | 36 |
| intraPredAngle | -17 | -19 | -21 | -23 | -26 | -29 | -32 | -29 | -26 |
| PredModeIntra | 37 | 38 | 39 | 40 | 41 | 42 | 43 | 44 | 45 |
| intraPredAngle | -23 | -21 | -19 | -17 | -15 | -13 | -11 | -9 | -7 |
| PredModeIntra | 46 | 47 | 48 | 49 | 50 | 51 | 52 | 53 | 54 |
| intraPredAngle | -5 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 5 |
| PredModeIntra | 55 | 56 | 57 | 58 | 59 | 60 | 61 | 62 | 63 |
| intraPredAngle | 7 | 9 | 11 | 13 | 15 | 17 | 19 | 21 | 23 |
| PredModeIntra | 64 | 65 | 66 | 67 | 68 | 69 | 70 | 71 | 72 |
| intraPredAngle | 26 | 29 | 32 | 35 | 39 | 45 | 49 | 54 | 60 |
| PredModeIntra | 73 | 74 | 75 | 76 | |||||
| intraPredAngle | 68 | 79 | 93 | 114 |
현재 블록이 비정방형이고, S802 단계에서 획득된 현재 블록의 인트라 예측 모드가 변환 범위에 속하는 경우, 현재 블록의 인트라 예측 모드를 와이드 앵글 인트라 예측 모드로 변환할 수 있다. 상기 변환 범위는 현재 블록의 크기, 형태 또는 비율 중 적어도 하나를 기초로 결정될 수 있다. 여기서, 상기 비율은 현재 블록의 너비 및 높이 사이의 비율을 나타낼 수 있다.현재 블록이 너비가 높이보다 큰 비정방형인 경우, 변환 범위는 우측 상단 대각 방향의 인트라 예측 모드 인덱스(예컨대, 66)부터 (우측 상단 대각 방향인 인트라 예측 모드의 인덱스 - N)로 설정될 수 있다. 여기서, N은 현재 블록의 비율을 기초로 결정될 수 있다. 현재 블록의 인트라 예측 모드가 변환 범위에 속하는 경우, 상기 인트라 예측 모드를 와이드 앵글 인트라 예측 모드로 변환할 수 있다. 상기 변환은 상기 인트라 예측 모드에 기 정의된 값을 차감하는 것일 수 있고, 기 정의된 값은 와이드 앵글 인트라 예측 모드들을 제외한 인트라 예측 모드들의 총 개수 (예컨대, 67)일 수 있다.
상기 실시예에 의해, 66번부터 53번 사이의 인트라 예측 모드들은, 각각 -1번부터 -14번 사이의 와이드 앵글 인트라 예측 모드들로 변환될 수 있다.
현재 블록이 높이가 너비보다 큰 비정방형인 경우, 변환 범위는 좌측 하단 대각 방향의 인트라 예측 모드 인덱스(예컨대, 2) 부터 (좌측 하단 대각 방향의 인트라 예측 모드의 인덱스 + M)으로 설정될 수 있다. 여기서, M은 현재 블록의 비율을 기초로 결정될 수 있다. 현재 블록의 인트라 예측 모드가 변환 범위에 속하는 경우, 상기 인트라 예측 모드를 와이드 앵글 인트라 예측 모드로 변환할 수 있다. 상기 변환은 상기 인트라 예측 모드에 기 정의된 값을 가산하는 것일 수 있고, 기 정의된 값은 와이드 앵글 인트라 예측 모드들을 제외한 방향성 인트라 예측 모드들의 총 개수(예컨대, 65)일 수 있다.
상기 실시예에 의해, 2번부터 15번 사이의 인트라 예측 모드들 각각은 67번부터 80번 사이의 와이드 앵글 인트라 예측 모드들로 변환될 수 있다.
이하, 변환 범위에 속하는 인트라 예측 모드들을 와이드 앵글 인트라 대체 예측 모드로 호칭하기로 한다.
변환 범위는 현재 블록의 비율에 기초하여 결정될 수 있다. 일 예로, 표 4 및 표 5은 각각 와이드 앵글 인트라 예측 모드 제외 35개의 인트라 예측 모드가 정의된 경우와 67개의 인트라 예측 모드가 정의된 경우, 변환 범위를 나타낸다.
| Condition | Replaced Intra Prediction Modes |
| W/H = 2 | Modes 2, 3, 4 |
| W/H > 2 | Modes 2, 3, 4, 5, 6 |
| W/H = 1 | None |
| H/W = 1/2 | Modes 32, 33, 34 |
| H/W < 1/2 | Modes 30, 31, 32, 33, 34 |
| Condition | Replaced Intra Prediction Modes |
| W/H = 2 | Modes 2, 3, 4, 5, 6, 7 |
| W/H > 2 | Modes 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 |
| W/H = 1 | None |
| H/W = 1/2 | Modes 61, 62, 63, 64, 65, 66 |
| H/W < 1/2 | Modes 57, 58, 59, 60, 61, 62, 63, 64, 65, 66 |
표 4 및 표 5에 나타난 예에서와 같이, 현재 블록의 비율에 따라, 변환 범위에 포함되는 와이드 앵글 인트라 대체 예측 모드들의 개수가 상이할 수 있다.현재 블록의 비율을 보다 세분화하여, 다음 표 6과 같이 변환 범위를 설정할 수도 있다.
| Condition | Replaced Intra Prediction Modes |
| W/H = 16 | Modes 12, 13, 14, 15 |
| W/H = 8 | Modes 12, 13 |
| W/H = 4 | Modes 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 |
| H/W = 2 | Modes 2, 3, 4, 5, 6, 7 |
| H/W = 1 | None |
| W/H = 1/2 | Modes 61, 62, 63, 64, 65, 66 |
| W/H = 1/4 | Modes 57, 58, 59, 60, 61, 62, 63, 64, 65, 66 |
| W/H = 1/8 | Modes 55, 56 |
| H/W = 1/16 | Modes 53, 54, 55, 56 |
비인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정된 경우, 또는, 복수의 참조 샘플 라인들 중 어느 하나를 선택하는 멀티 라인 인트라 예측 부호화 방법이 사용된 경우에 있어서, 와이드 앵글 인트라 예측 모드가 사용되지 않도록 설정될 수 있다. 즉, 현재 블록이 비정방형이고, 현재 블록의 인트라 예측 모드가 변환 범위에 속하는 경우라 하더라도, 현재 블록의 인트라 예측 모드를 와이드 앵글 인트라 예측 모드로 변환하지 않을 수 있다.또는, 현재 블록의 인트라 예측 모드가 와이드 앵글 인트라 예측 모드로 결정된 경우, 비인접 참조 샘플 라인들을 현재 블록의 참조 샘플 라인으로 이용 가능하지 않은 것으로 설정하거나, 복수의 참조 샘플 라인들 중 어느 하나를 선택하는 멀티 라인 인트라 예측 부호화 방법이 사용되지 않도록 설정할 수 있다. 멀티 라인 인트라 예측 부호화 방법이 사용되지 않는 경우, 인접 참조 샘플 라인이 현재 블록의 참조 샘플 라인으로 결정될 수 있다.
와이드 앵글 인트라 예측 모드가 사용되지 않는 경우, refW 및 refH를 nTbW 와 nTbH의 합으로 설정할 수 있다. 이에 따라, 좌측 상단 참조 샘플 제외, 현재 블록과의 거리가 i인 비인접 레퍼런스 샘플은 (nTbW + nTbH + offsetX[i])개의 상단 참조 샘플과 (nTbW + nTbH + offsetY[i])개의 좌측 참조 샘플을 포함할 수 있다. 즉, 현재 블록과의 거리가 i인 비인접 레퍼런스 샘플은 (2nTbW + 2nTbH + offsetX[i] + offsetY[i] + 1)개의 참조 샘플들을 포함할 수 있다. 예를 들어, whRatio의 값이 1보다 큰 경우에는 offsetX의 값을 offsetY의 값보다 크게 설정할 수 있다. 일 예로, offsetX의 값은 1로 설정되고, offsetY의 값은 0으로 설정될 수 있다. 반면, whRatio의 값이 1보다 작은 경우에는 offsetX의 값보다 offsetY의 값을 더 크게 설정할 수 있다. 일 예로, offsetX의 값은 0으로 설정되고, offsetY의 값은 1로 설정될 수 있다.
기존의 인트라 예측 모드들에 추가로 와이드 앵글 인트라 예측 모드들이 사용됨에 따라, 와이드 앵글 인트라 예측 모드들을 부호화하는데 필요한 리소스가 증가하여, 부호화 효율이 낮아질 수 있다. 이에 따라, 와이드 앵글 인트라 예측 모드들을 그대로 부호화하는 대신, 와이드 앵글 인트라 예측 모드들에 대한 대체 인트라 예측 모드들을 부호화하여, 부호화 효율을 향상시킬 수 있다.
일 예로, 현재 블록이 67번의 와이드 앵글 인트라 예측 모드를 이용하여 부호화된 경우, 67번의 와이드 앵글 대체 인트라 예측 모드인 2번을 현재 블록의 인트라 예측 모드로 부호화할 수 있다. 또한, 현재 블록이 -1번의 와이드 앵글 인트라 예측 모드로 부호화된 경우, -1번의 와이드 앵글 대체 인트라 예측 모드인 66번을 현재 블록의 인트라 예측 모드로 부호화할 수 있다.
복호화기에서는 현재 블록의 인트라 예측 모드를 복호화하고, 복호화된 인트라 예측 모드가 변환 범위에 포함되는지 여부를 판단할 수 있다. 복호화된 인트라 예측 모드가 와이드 앵글 대체 인트라 예측 모드인 경우, 인트라 예측 모드를 와이드 앵글 인트라 예측 모드로 변환할 수 있다.
또는, 현재 블록이 와이드 앵글 인트라 예측 모드로 부호화된 경우, 와이드 앵글 인트라 예측 모드를 그대로 부호화할 수도 있다.
인트라 예측 모드의 부호화는 상술한 MPM 리스트를 기초로 이루어질 수 있다. 구체적으로, 이웃 블록이 와이드 앵글 인트라 예측 모드로 부호화된 경우, 상기 와이드 앵글 인트라 예측 모드에 대응하는 와이드 앵글 대체 인트라 예측 모드를 기초로, MPM을 설정할 수 있다. 일 예로, 이웃 블록이 와이드 앵글 인트라 예측 모드로 부호화된 경우, 변수 candIntraPredModeX(X는 A 또는 B)를 와이드 앵글 대체 인트라 예측 모드로 설정할 수 있다.
또는, 이웃 블록의 와이드 앵글 인트라 예측 모드를 기초로 MPM을 설정할 수도 있다. 일 예로, 이웃 블록이 와이드 앵글 인트라 예측 모드로 부호화된 경우, 변수 candIntraPredModeX를 와이드 앵글 인트라 예측 모드로 설정할 수 있다.
현재 블록의 참조 샘플 라인이 비인접 참조 샘플 라인인지 여부, 또는 복수의 참조 샘플 라인들 중 하나를 선택하는 멀티 라인 인트라 예측 부호화 방법이 적용되는지 여부에 기초하여 MPM을 유도할 수도 있다. 일 예로, 현재 블록의 참조 샘플 라인이 비인접 참조 샘플 라인이고, 현재 블록에 이웃하는 이웃 블록의 인트라 예측 모드가 와이드 앵글 인트라 예측 모드인 경우, 디폴트 모드를 현재 블록의 MPM으로 설정할 수 있다.
일 예로, 좌측 이웃 블록의 인트라 예측 모드를 기초로 유도되는 candIntraPredModeA와 상단 이웃 블록의 인트라 예측 모드를 기초로 유도되는 candIntraPredModeB가 동일하고, candIntraPredModeA가 플래너 또는 DC인 경우, 현재 블록의 참조 샘플 라인의 인덱스가 0인지 여부를 고려하여, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = (IntraLumaRefLineIdx == 0) ? Intra_Planar : INTRA_ANGULAR 50
MPM[1] = (IntraLumaRefLineIdx == 0) ? Intra_DC : INTRA_ANGULAR 18
MPM[2] = INTRA_ANGULAR 2
즉, 현재 블록의 참조 샘플 라인의 인덱스가 0인 경우에는 플래너 모드와 DC 모드를 MPM들로 설정하는 반면, 현재 블록의 참조 샘플 라인 인덱스가 0이 아닌 경우에는 수직 방향 인트라 예측 모드(INTRA_ANGULAR 50)과 수평 방향 인트라 예측 모드(INTRA_ANGULAR 18)를 MPM들로 설정할 수 있다.
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA와 candIntraPredModeB가 동일하나 candIntraPredModeA가 와이드 앵글 인트라 예측 모드인 경우, 다음과 같이, MPM들을 유도할 수 있다.
MPM[0] = INTRA_ANGULAR2
MPM[1] = INTRA_ANGULAR18
MPM[2] = INTRA_ANGULAR50
또는, 다음과 같이 MPM들을 유도할 수도 있다.
MPM[0] = INTRA_ANGULAR50
MPM[1] = INTRA_ANGULAR18
MPM[2] = INTRA_ANGULAR2
즉, 현재 블록의 참조 샘플 라인 인덱스가 0이 아닌 경우에는 와이드 앵글 인트라 예측 모드를 MPM으로 설정하지 않을 수 있다.
candIntraPredModeA 및 candIntraPredModeB가 동일하고, candIntraPredModeA가 방향성 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = 2 + ((candIntraPredModeA + 61) % 64)
MPM[2] = 2 + ((candIntraPredModeA - 1) % 64)
현재 블록의 참조 샘플 라인의 인덱스가 0이고, candIntraPredModeA 및 candIntraPredModeB가 상이한 경우, MPM[0] 및 MPM[1]은 각각 candIntraPredModeA 및 candIntraPredModeB로 설정될 수 있다. MPM[2]는 플래너, DC, 또는 수직 방향 모드 중 MPM[0] 및 MPM[1]과 동일하지 않은 것으로 설정될 수 있다.
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA 및 candIntraPredModeB 중 어느 하나는 플래너이고 다른 하나는 DC인 경우, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = INTRA_ANGULAR2
MPM[1] = INTRA_ANGULAR18
MPM[2] = INTRA_ANGULAR50
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA 및 candIntraPredModeB가 모두 와이드 앵글 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유도할 수 있다.
MPM[0] = INTRA_ANGULAR2
MPM[1] = INTRA_ANGULAR18
MPM[2] = INTRA_ANGULAR50
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA 및 candIntraPredModeB 중 어느 하나가 와이드 앵글 인트라 예측 모드인 경우, candIntrapredModeA 및 candIntraPredModeB 중 논-와이드 앵글 인트라 예측 모드인 것을 MPM[0]로 설정하고, MPM[0]와 유사한 인트라 예측 모드들을 MPM[1] 및 MPM[2]로 설정할 수 있다. 일 예로, candIntraPredModeA가 논 와이드 앵글 인트라 예측 모드이고, candIntraPredModeB가 와이드 앵글 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유돨 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = 2 + ((candIntraPredModeA + 61) % 64)
MPM[2] = 2 + ((candIntraPredModeA - 1) % 64)
반면, candIntraPredModeA가 와이드 앵글 인트라 예측 모드이고, candIntraPredModeB가 논 와이드 앵글 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유돨 수 있다.
MPM[0] = candIntraPredModeB
MPM[1] = 2 + ((candIntraPredModeB + 61) % 64)
MPM[2] = 2 + ((candIntraPredModeB - 1) % 64)
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA 및 candIntraPredModeB 중 어느 하나가 플래너 또는 DC이고, 다른 하나는 논 와이드 앵글 인트라 예측 모드인 경우, candIntrapredModeA 및 candIntraPredModeB 중 논-와이드 앵글 인트라 예측 모드인 것을 MPM[0]로 설정하고, MPM[0]와 유사한 인트라 예측 모드들을 MPM[1] 및 MPM[2]로 설정할 수 있다. 일 예로, candIntraPredModeA가 논 와이드 앵글 인트라 예측 모드이고, candIntraPredModeB가 플래너 또는 DC인 경우, 다음과 같이, MPM들을 유도할 수 있다.
MPM[0] = candIntraPredModeA
MPM[1] = 2 + ((candIntraPredModeA + 61) % 64)
MPM[2] = 2 + ((candIntraPredModeA - 1) % 64)
반면, candIntraPredModeA가 플래너 또는 DC이고, candIntraPredModeB가 논 와이드 앵글 인트라 예측 모드인 경우, 다음과 같이 MPM들을 유돨 수 있다.
MPM[0] = candIntraPredModeB
MPM[1] = 2 + ((candIntraPredModeB + 61) % 64)
MPM[2] = 2 + ((candIntraPredModeB - 1) % 64)
현재 블록의 참조 샘플 라인의 인덱스가 0이 아니고, candIntraPredModeA 및 candIntraPredModeB가 모두 논 와이드 앵글 인트라 예측 모드인 경우, candIntraPredModeA 및 candIntraPredModeB를 각각 MPM[0] 및 MPM[1]로 설정할 수 있다. 수직 방향 인트라 예측 모드(INTRA_ANGULAR50), 수평 방향 인트라 에측 모드(INTRA_ANGULAR18) 또는 좌측 하단 대각 방향 인트라 예측 모드(INTRA_ANGULAR2) 중 MPM[0] 및 MPM[1]과 중복되지 않는 어느 하나를 MPM[2]로 설정할 수 있다.
코딩 블록 또는 변환 블록을 복수의 서브 블록들(또는 서브 파티션들)로 분할할 수 있다. 코딩 블록 또는 변환 블록이 복수의 서브 블록들로 분할된 경우, 서브 블록 각각에 대해 예측, 변환 및 양자화를 수행할 수 있다. 코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하는 것을 서브 파티션 인트라 부호화 방법이라 정의할 수 있다.
서브 파티션 인트라 부호화 방법이 적용되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 1비트의 플래그일 수 있다. 일 예로, 코딩 블록 또는 변환 블록이 복수의 서브 블록들로 분할되는지 여부를 나타내는 신택스 요소 'intra_subpartitions_mode_flag'가 비트스트림을 통해 시그날링될 수 있다.
또는, 코딩 블록 또는 변환 블록의 크기, 형태 또는 인트라 예측 모드 중 적어도 하나에 기초하여, 서브 파티션 인트라 부호화 방법이 적용되는지 여부를 결정할 수 있다. 일 예로, 코딩 블록의 인트라 예측 모드가 비방향성 인트라 예측 모드(예컨대, 플래너 또는 DC) 또는 기 정의된 방향성 인트라 예측 모드(예컨대, 수평 방향의 인트라 예측 모드, 수직 방향의 인트라 예측 모드 또는 대각 방향의 인트라 예측 모드)인 경우에는, 서브 파티션 인트라 부호화 방법을 적용하지 않을 수 있다. 또는, 코딩 블록의 크기가 문턱값보다 작은 경우, 서브 파티션 인트라 부호화 방법이 사용되지 않도록 설정될 수 있다.
또는, 코딩 블록의 인트라 예측 모드를 기초로 서브 블록에 대한 인트라 예측을 수행하는 경우, 서브 블록의 인트라 예측시 이웃하는 서브 블록에 포함된 복원 샘플을 참조 샘플로서 이용하여야 하는지 여부를 기초로, 서브 파티션 인트라 부호화 방법의 적용 여부를 결정할 수 있다. 일 예로, 코딩 블록이 인트라 예측 모드가 대각 방향의 인트라 예측 모드 또는 와이드 앵글 인트라 예측 모드이고, 상기 인트라 예측 모드에 기초하여 서브 블록에 대한 인트라 예측 수행시, 이웃하는 서브 블록을 참조 샘플로서 활용할 수 없는 경우에는, 서브 파티션 인트라 부호화 방법이 사용되지 않도록 설정될 수 있다.
또는, 코딩 블록의 높이 및 너비비가 문턱값 이상 또는 문턱값 이하인 경우, 서브 파티션 인트라 부호화 방법이 사용되지 않도록 설정될 수 있다. 또는, 코딩 블록의 높이 또는 너비 중 적어도 하나가 문턱값 이하인 경우, 서브 파티션 인트라 부호화 방법을 사용하지 않을 수 있다. 일 예로, 코딩 블록의 높이와 너비 모두 문턱값 이하인 경우, 서브 파티션 인트라 부호화 방법을 사용하지 않을 수 있다. 문턱값은 부호화기 및 복호화기에서 기 정의된 값을 가질 수 있다. 또는, 문턱값을 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다.
또는, 코딩 블록 또는 변환 블록의 크기, 형태 또는 인트라 예측 모드 중 적어도 하나를 기초로, 서브 파티션 인트라 부호화 방법의 적용 여부를 나타내는 플래그의 시그날링 여부를 결정할 수 있다. 일 예로, 코딩 블록의 높이와 너비 모두 문턱값 이하인 경우 및/또는 코딩 블록의 크기가 문턱값 이상인 경우에 한하여, 서브 파티션 인트라 부호화 방법의 적용 여부를 나타내는 플래그가 부호화되어 시그날링될 수 있다. 서브 파티션 인트라 부호화 방법의 적용 여부를 나타내는 플래그가 부호화되지 않은 경우, 서브 파티션 인트라 부호화 방법을 적용하지 않을 수 있다.
서브 파티션 인트라 부호화 방법이 적용될 경우, 코딩 블록 또는 변환 블록의 분할 형태를 결정할 수 있다. 여기서, 분할 형태는 코딩 블록 또는 변환 블록의 분할 방향을 나타낸다. 일 예로, 수직 방향 파티셔닝은 적어도 하나의 수직선을 이용하여 코딩 블록 또는 변환 블록을 분할하는 것을 의미하고, 수평 방향 파티셔닝은 적어도 하나의 수평선을 이용하여 코딩 블록 또는 변환 블록을 분할하는 것을 의미할 수 있다.
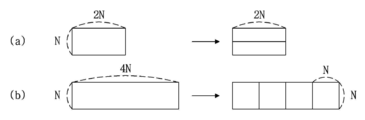
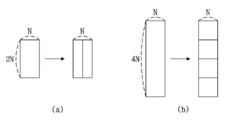
도 16은 수직 방향 파티셔닝 및 수평 방향 파티셔닝의 일 예를 나타낸 도면이다.
도 16의 (a)는 코딩 블록이 2개의 서브 블록들로 분할되는 예를 나타내고, 도 16의 (b)는 코딩 블록이 4개의 서브 블록들로 분할되는 예를 나타낸다.
코딩 블록 또는 변환 블록의 분할 형태를 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 코딩 블록 또는 변환 블록에 수직 방향 파티셔닝이 적용되는지 여부 또는 수평 방향 파티셔닝이 적용되는지 여부를 나타내는 정보가 시그날링될 수 있다. 상기 정보는 1비트의 플래그 intra_subpart_type_flag일 수 있다. 상기 플래그의 값이 1인 것은 코딩 블록 또는 변환 블록이 수평 방향으로 파티셔닝됨을 나타내고, 상기 플래그의 값이 0인 것은 코딩 블록 또는 변환 블록이 수직 방향으로 파티셔닝됨을 나타낸다.
또는, 코딩 블록 또는 변환 블록의 크기, 형태 또는 인트라 예측 모드에 기초하여, 코딩 블록 또는 변환 블록의 분할 형태를 결정할 수 있다. 일 예로, 코딩 블록의 너비 및 높이비에 기초하여, 코딩 블록의 분할 형태를 결정할 수 있다. 예컨대, 코딩 블록의 높이 및 너비비를 나타내는 whRatio의 값이 제1 문턱값 이상인 경우에는, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다. 그렇지 않은 경우에는, 코딩 블록에 수평 방향 파티셔닝을 적용할 수 있다.
도 17은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
설명의 편의를 위해, 제1 문턱값은 2인 것으로 가정한다. 도 17의 (a)에 도시된 예에서, 코딩 블록의 whRatio은 1이고, 이는 제1 문턱값보다 작다. 이에 따라, 코딩 블록의 분할 형태를 나타내는 정보의 부호화를 생략하고, 코딩 블록에 수평 방향 파티셔닝을 적용할 수 있다.
도 17의 (b)에 도시된 예에서, 코딩 블록의 whRatio는 2이고, 이는 제1 문턱값과 같다. 이에 따라, 코딩 블록의 분할 형태를 나타내는 정보의 부호화를 생략하고, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다.
제1 문턱값과 부호과 반대인 제2 문턱값을 이용하여, 코딩 블록의 분할 형태를 결정할 수도 있다. 일 예로, whRatio의 값이 제2 문턱값 이하인 경우에는, 코딩 블록에 수평 방향 파티셔닝을 적용하고, 그렇지 않은 경우에는, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다. 제1 문턱값 및 제2 문턱값의 절대값은 동일하고, 이들의 부호는 상이할 수 있다. 일 예로, 제1 문턱값이 N (여기서, N은, 1, 2, 4 등의 정수)인 경우, 제2 문턱값은 -N일 수 있다.
도 18은 코딩 블록의 분할 형태를 결정하는 예를 나타낸 도면이다.
설명의 편의를 위해, 제2 문턱값은 -2인 것으로 가정한다. 도 18의 (a)에 도시된 예에서, 코딩 블록의 whRatio은 -1이고, 이는 제2 문턱값보다 크다. 이에 따라, 코딩 블록의 분할 형태를 나타내는 정보의 부호화를 생략하고, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다.
도 18의 (b)에 도시된 예에서, 코딩 블록의 whRatio는 -2이고, 이는 제2 문턱값과 같다. 이에 따라, 코딩 블록의 분할 형태를 나타내는 정보의 부호화를 생략하고, 코딩 블록에 수평 방향 파티셔닝을 적용할 수 있다.
또는, 제1 문턱값 및 제2 문턱값을 기준으로, 코딩 블록의 분할 형태를 결정할 수도 있다. 일 예로, whRatio의 값이 제1 문턱값 이상인 경우에는, 코딩 블록에 수평 방향 파티셔닝을 적용하고, whRatio의 값이 제2 문턱값 이하인 경우에는, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다. whRatio의 값이 제1 문턱값 및 제2 문턱값 사이에 존재하는 경우, 비트스트림으로부터 정보를 파싱하여, 현재 블록의 분할 형태를 결정할 수 있다.
제1 문턱값 및 제2 문턱값은 부호화기 및 복호화기에서 기 정의되어 있을 수 있다. 또는, 시퀀스, 픽처 또는 슬라이스별로 제1 문턱값 및 제2 문턱값을 정의할 수 있다.
또는, 코딩 블록 또는 변환 블록의 크기에 기초하여, 분할 형태를 결정할 수 있다. 일 예로, 코딩 블록의 크기가 Nxn인 경우, 수직 방향 파티셔닝을 적용하고, 코딩 블록의 크기가 nxN인 경우, 수평 방향 파티셔닝을 적용할 수 있다. 여기서, n은 N보다 작은 자연수일 수 있다. N 및/또는 n은 부호화기 및 복호화기에서 기 정의된 값일 수 있다. 또는, N 및/또는 n을 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, N은 32, 64, 128 또는 256 등일 수 있다. 이에 따라, 코딩 블록의 크기가 128xn(여기서, n은 16, 32 또는 64 등의 자연수)인 경우에는 수직 방향 파티셔닝을 적용하고, 코딩 블록의 크기가 nx128인 경우에는 수평 방향 파티셔닝을 적용할 수 있다.
또는, 코딩 블록 또는 변환 블록의 인트라 예측 모드에 기초하여, 코딩 블록 또는 변환 블록의 분할 형태를 결정할 수 있다. 일 예로, 코딩 블록의 인트라 예측 모드가 수평 방향 또는 수평 방향과 유사한 방향인 경우, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다. 여기서, 수평 방향과 유사한 방향의 인트라 예측 모드는 수평 방향의 인트라 예측 모드(예컨대, 도 10의 (b)에 도시된 INTRA_ANGULAR18)와의 인덱스 차분 값이 문턱값 이하인 인트라 예측 모드(예컨대, INTRA_ANGULAR18 ± N)를 나타낸다. 반면, 코딩 블록의 인트라 예측 모드가 수직 방향 또는 수직 방향과 유사한 방향인 경우, 코딩 블록에 수평 방향 파티셔닝을 적용할 수 있다. 여기서, 수직 방향과 유사한 방향의 인트라 예측 모드는 수직 방향의 인트라 예측 모드(예컨대, 도 10의 (b)에 도시된 INTRA_ANGULAR50)와의 인덱스 차분 값이 문턱값 이하인 인트라 예측 모드(예컨대, INTRA_ANGULAR50 ± N)를 나타낸다. 여기서, 문턱값 N은 부호화기 및 복호화기에서 기 정의된 값일 수 있다. 또는, 문턱값 N을 결정하기 위한 정보가 시퀀스, 픽처 또는 슬라이스 레벨에서 시그날링될 수 있다.
도 19는 코딩 블록의 인트라 예측 모드에 기초하여, 코딩 블록의 분할 형태가 결정되는 예를 나타낸 도면이다.
도 19의 (a)에 도시된 예에서와 같이, 코딩 블록의 인트라 예측 모드가 수직 방향과 유사한 방향인 경우, 코딩 블록에 수평 방향 파티셔닝을 적용할 수 있다.
반면, 도 19의 (b)에 도시된 예에서와 같이, 코딩 블록의 인트라 예측 모드가 수평 방향과 유사한 방향인 경우, 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다.
도시된 예와 반대로, 코딩 블록의 인트라 예측 모드가 수평 방향 또는 수평 방향과 유사한 방향인 경우, 수평 방향 파티셔닝을 적용하고, 코딩 블록의 인트라 예측 모드가 수직 방향 또는 수직 방향과 유사한 방향인 경우, 수직 방향 파티셔닝을 적용할 수도 있다.
수직 방향 파티셔닝 또는 수평 방향 파티셔닝을 적용할 경우, 코딩 블록 또는 변환 블록을 분할함으로써 생성되는 서브 블록의 너비 또는 높이 중 적어도 하나가 문턱값보다 작은지 여부를 기초로, 코딩 블록 또는 변환 블록의 분할 형태를 결정할 수 있다. 여기서, 문턱값은 2, 4, 또는 8 등의 정수일 수 있다.
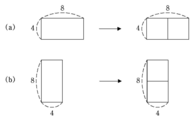
도 20은 코딩 블록의 분할 양상을 설명하기 위한 도면이다.
도 20의 (a)에 도시된 4x8 크기의 코딩 블록에 수평 방향 파티셔닝을 적용하는 경우, 상기 코딩 블록은 2x8 크기의 서브 블록들로 분할된다. 이 경우, 서브 블록의 너비가 문턱값보다 작게 되므로, 상기 코딩 블록에는 수평 방향 파티셔닝이 이용 가능하지 않을 수 있다. 반면, 4x8 크기의 코딩 블록에 수직 방향 파티셔닝을 적용하는 경우, 상기 코딩 블록은 4x4 크기의 서브 블록들로 분할된다. 서브 블록의 너비 및 높이 모두 문턱값 이상이므로, 상기 코딩 블록에 수직 방향 파티셔닝이 이용 가능할 수 있다. 상기 코딩 블록에는 수직 방향 파티셔닝만이 이용 가능하므로, 상기 코딩 블록에 대한 분할 형태를 나타내는 정보의 부호화를 생략하고, 상기 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다.
도 20의 (b)에 도시된 8x4 크기의 코딩 블록에 수직 방향 파티셔닝을 적용하는 경우, 상기 코딩 블록은 8x2 크기의 서브 블록들로 분할된다. 이 경우, 서브 블록의 높이가 문턱값보다 작게 되므로, 상기 코딩 블록에는 수직 방향 파티셔닝이 이용 가능하지 않을 수 있다. 반면, 8x4 크기의 코딩 블록에 수평 방향 파티셔닝을 적용하는 경우, 상기 코딩 블록은 4x4 크기의 서브 블록들로 분할된다. 서브 블록의 너비 및 높이 모두 문턱값 이상이므로, 상기 코딩 블록에 수평 방향 파티셔닝이 이용 가능할 수 있다. 상기 코딩 블록에는 수평 방향 파티셔닝만이 이용 가능하므로, 상기 코딩 블록에 대한 분할 형태를 나타내는 정보의 부호화를 생략하고, 상기 코딩 블록에 수직 방향 파티셔닝을 적용할 수 있다.
수직 방향 파티셔닝 및 수평 방향 파티셔닝이 모두 이용 가능한 경우, 코딩 블록의 분할 형태를 나타내는 정보를 파싱하여, 코딩 블록의 분할 형태를 결정할 수 있다.
서브 블록들의 개수는 코딩 블록 또는 변환 블록의 크기 또는 형태 중 적어도 하나를 기초로 결정될 수 있다. 일 예로, 코딩 블록의 너비 또는 높이 중 어느 하나가 8이고, 다른 하나는 4인 경우, 코딩 블록은 2개의 서브 블록들로 분할될 수 있다. 반면, 코딩 블록의 너비 및 높이가 모두 8이상이거나, 코딩 블록의 너비 또는 높이 중 어느 하나가 8보다 큰 경우, 코딩 블록은 4개의 서브 블록들로 분할될 수 있다. 요약하면, 코딩 블록이 4x4 크기인 경우에는, 코딩 블록이 서브 블록들로 분할되지 않을 수 있다. 코딩 블록이 4x8 또는 8x4 크기인 경우에는, 코딩 블록을 2개의 서브 블록들로 분할할 수 있다. 이 외의 경우에는 코딩 블록을 4개의 서브 블록들로 분할할 수 있다.
또는, 서브 블록의 크기, 형태 또는 서브 블록들의 개수를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 서브 블록들의 개수를 나타내는 정보에 의해, 서브 블록들의 크기 또는 형태가 결정될 수 있다. 또는, 서브 블록들의 크기 또는 형태를 나타내는 정보에 의해, 서브 블록들의 개수가 결정될 수 있다.
서브 파티션 인트라 부호화 방법이 적용되는 경우, 코딩 블록 또는 변환 블록을 분할함으로써 생성되는 서브 블록들은 동일한 인트라 예측 모드를 사용할 수 있다. 일 예로, 코딩 블록에 이웃하는 이웃 블록들의 인트라 예측 모드를 기초로, 코딩 블록에 대한 MPM들을 유도하고, 유도된 MPM들을 기초로 코딩 블록에 대한 인트라 예측 모드를 결정할 수 있다. 코딩 블록의 인트라 예측 모드가 결정되면, 각 서브 블록은 결정된 인트라 예측 모드를 이용하여, 인트라 예측을 수행할 수 있다.
서브 파티션 인트라 부호화 방법이 적용되는 경우, MPM들 중 어느 하나를 코딩 블록의 인트라 예측 모드로 결정할 수 있다. 즉, 서브 파티션 인트라 부호화 방법이 적용되는 경우, MPM 플래그를 시그날링하지 않더라도, MPM 플래그가 참인 것으로 간주될 수 있다.
또는, 서브 파티션 인트라 부호화 방법이 적용되는 경우, 기 정의된 후보 인트라 예측 모드들 중 어느 하나를 코딩 블록의 인트라 예측 모드로 결정할 수 있다. 일 예로, 수평 방향의 인트라 예측 모드, 수직 방향의 인트라 예측 모드, 대각 방향의 인트라 예측 모드(예컨대, 좌상단 인트라 예측 모드, 우상단 인트라 예측 모드 또는 좌하단 인트라 예측 모드 중 적어도 하나) 또는 비방향성 인트라 예측 모드(예컨대, 플래너 또는 DC 중 적어도 하나) 중 어느 하나를 코딩 블록의 인트라 예측 모드로 결정할 수 있다. 기 정의된 후보 인트라 예측 모드들 중 어느 하나를 특정하는 인덱스 정보가 비트스트림을 통해 시그날링될 수 있다.
본 발명의 일 실시예에 따르면, 서브 블록들 중 적어도 하나의 인트라 예측 모드를 다른 서브 블록과 상이하게 설정할 수도 있다. 일 예로, N번째 서브 블록의 인트라 예측 모드는 N-1번째 서브 블록의 인트라 예측 모드에 오프셋을 가산 또는 감산하여 유도될 수 있다. 오프셋은 부호화기 및 복호화기에서 기 정의되어 있을 수 있다. 또는, 코딩 블록의 크기, 형태, 인트라 예측 모드, 서브 블록의 크기, 형태, 서브 블록들의 개수 또는 코딩 블록의 분할 방향 중 적어도 하나를 기초로 오프셋을 유도할 수 있다. 또는, 오프셋을 유도하기 위한 정보를 비트스트림을 통해 시그날링할 수 있다.
또는, N-1번째 서브 블록의 인트라 예측 모드가 비방향성 모드인 경우에는, N번째 서브 블록의 인트라 예측 모드도 N-1번째 서브 블록의 인트라 예측 모드와 동일하게 설정하고, N-1번째 서브 블록의 인트라 예측 모드가 방향성 모드인 경우에는, N-1번째 서브 블록의 인트라 예측 모드에 오프셋을 가산 또는 감산하여 유도된 인트라 예측 모드를 N번째 서브 블록의 인트라 예측 모드와 동일하게 설정할 수 있다.
또는, 복수의 서브 블록들 중 일부에는 방향성 인트라 예측 모드를 적용하고, 나머지에는 비방향성 인트라 예측 모드를 적용할 수 있다. 서브 블록의 크기, 형태, 위치 또는 서브 블록들의 개수 중 적어도 하나를 고려하여, 비방향성 인트라 예측 모드가 적용되는 서브 블록을 결정할 수 있다. 또는, 복수개의 서브 블록들 중 어느 하나에 적용되는 방향성 인트라 예측 모드가 기 정의된 값인 경우에 한하여, 다른 하나에 비방향성 인트라 예측 모드를 적용할 수 있다.
또는, MPM들로부터 각 서브 블록의 인트라 예측 모드를 유도할 수 있다. 이를 위해, 각 서브 블록에 대해 MPM들 중 어느 하나를 특정하는 인덱스 정보를 시그날링할 수 있다.
또는, 기 정의된 후보 인트라 예측 모드들로부터 각 서브 블록의 인트라 예측 모드를 유도할 수 있다. 이를 위해, 각 서브 블록에 대해 기 정의된 후보 인트라 예측 모드들 중 어느 하나를 특정하는 인덱스 정보를 시그날링할 수 있다.
또는, 서브 블록들의 인트라 예측 모드가 동일하게 설정되는지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다.
서브 블록들의 양자화 파라미터를 개별적으로 결정할 수 있다. 이에 따라, 각 서브 블록의 양자화 파라미터의 값이 상이하게 설정될 수 있다. 각 서브 블록의 양자화 파라미터를 결정하기 위해, 이전 서브 블록의 양자화 파라미터와의 차분값을 나타내는 정보를 부호화할 수 있다. 일 예로, N번째 서브 블록에 대해, N번째 서브 블록의 양자화 파라미터와 N-1번째 서브 블록의 양자화 파라미터의 차분값을 부호화할 수 있다.
서브 블록의 인트라 예측은 참조 샘플을 이용하여 수행될 수 있다. 이때, 참조 샘플은, 서브 블록에 인접하는 이웃 블록의 복원 샘플로부터 유도될 수 있다. 서브 블록에 인접하는 이웃 블록이 상기 서브 블록과 동일한 코딩 블록에 포함된 타 서브 블록인 경우, 상기 타 서브 블록의 복원 샘플을 기초로, 상기 서브 블록의 참조 샘플을 유도할 수 있다. 일 예로, 제1 서브 블록이 제2 서브 블록의 좌측 또는 상단에 위치하는 경우, 제1 서브 블록의 복원 샘플로부터 제2 서브 블록의 참조 샘플을 유도할 수 있다. 이를 위해, 서브 블록간에는 병렬 인트라 예측이 적용되지 않을 수 있다. 즉, 코딩 블록에 포함된 서브 블록들에 대해 순차적으로 부호화/복호화가 진행될 수 있다. 이에 따라, 제1 서브 블록의 부호화/복호화가 완료된 이후, 제2 서브 블록에 대한 인트라 예측이 수행될 수 있다.
서브 파티션 인트라 부호화 방법이 적용되는 경우에는, 복수의 참조 샘플 라인 후보들 중 어느 하나를 선택하는 멀티 라인 인트라 예측 부호화 방법을 사용하지 않도록 설정할 수 있다. 멀티 라인 인트라 예측 부호화 방법이 사용되지 않는 경우에는, 각 서브 블록에 인접하는 인접 참조 샘플 라인이 각 서브 블록의 참조 샘플 라인으로 결정될 수 있다.
또는, 서브 파티션 인트라 부호화 방법이 적용되는 경우에도, 멀티 라인 인트라 예측 부호화 방법을 사용할 수 있다. 이를 위해, 각 서브 블록에 대해 참조 샘플 라인을 특정하기 위한 인덱스 정보를 시그날링할 수 있다. 또는, 복수의 서브 블록들 중 어느 하나에 대해서만 참조 샘플 라인을 특정하기 위한 인덱스 정보를 시그날링하고, 나머지 서브 블록들에도 상기 인덱스 정보를 그대로 적용할 수 있다. 또는, 코딩 블록에 대해 참조 샘플 라인을 특정하기 위한 인덱스 정보를 시그날링하고, 상기 코딩 블록에 포함된 복수의 서브 블록들이 상기 인덱스 정보를 공유하도록 설정할 수 있다.
또는, 서브 블록들 중 기 정의된 위치 또는 기 정의된 파티션 인덱스를 갖는 서브 블록만이 멀티 라인 인트라 예측 부호화 방법을 이용하도록 설정할 수 있다. 일 예로, 복수의 서브 블록들 중 파티션 인덱스가 0인 서브 블록 또는 코딩 블록의 상단 경계 또는 좌측 경계에 접하는 서브 블록에 대해서만 참조 샘플 라인 후보들 중 어느 하나를 특정하는 인덱스 정보를 시그날링할 수 있다. 잔여 서브 블록들에 대해서는 멀티 라인 인트라 예측 부호화 방법을 적용하지 않을 수 있다. 이에 따라, 잔여 서브 블록들은 인접 참조 샘플 라인을 이용하여 인트라 예측을 수행할 수 있다.
서브 블록별로 예측 부호화 모드를 상이하게 설정할 수 있다. 일 예로, 일부 서브 블록에 대해서는 화면 내 예측을 적용하고, 다른 서브 블록에 대해서는 화면 간 예측, 현재 픽처 참조 또는 복합 예측을 적용할 수 있다.
도 21은 서브 블록별로 예측 부호화 모드가 상이하게 설정되는 예를 나타낸 도면이다.
서브 블록별로 인트라 예측 모드를 상이하게 설정하거나, 예측 부호화 모드를 상이하게 설정할 수 있다. 일 예로, 도 21에 도시된 예에서는, 서브 블록 0 및 서브 블록 1에 화면 내 예측이 적용되고, 서브 블록 1 및 서브 블록 2에 현재 픽처 참조가 적용된 것으로 도시되었다.
현재 픽처 참조가 이용되는 경우, 현재 픽처 또는 슬라이스(또는 타일 그룹)의 이미 복호화된 영역에서 서브 블록의 예측 블록을 유도할 수 있다. 현재 픽처 참조가 적용되는 경우, 서브 블록의 예측 블록을 특정하기 위해, 움직임 벡터가 유도될 수 있다. 현재 픽처 참조 하에서의 움직임 벡터를 '블록 벡터'라 호칭할 수도 있다.
움직임 벡터는 코딩 블록 또는 서브 블록에 이웃하는 이웃 블록의 움직임 벡터를 기초로 유도될 수 있다. 또는, 비트스트림을 통해 움직임 벡터를 결정하기 위한 정보가 시그날링될 수도 있다.
이때, 서브 블록의 움직임 벡터의 최대값은 서브 블록 또는 서브 블록이 속한 코딩 블록 또는 변환 블록의 크기에 따라 결정될 수 잇다. 일 예로, 서브 블록의 움직임 벡터는 서브 블록이 속한 코딩 블록 또는 변환 블록의 경계를 벗어나지 않도록 설정될 수 있다. 즉, 서브 블록의 예측 블록은, 서브 블록이 속한 코딩 블록 내 상기 서브 블록 이전에 부호화/복호화된 영역으로부터 유도될 수 있다.
움직임 벡터 대신, 코딩 블록 내 기 복호화된 서브 블록들 중 어느 하나를 나타내는 인덱스 정보를 부호화하여 시그날링할 수 있다. 서브 블록의 예측 블록은 인덱스 정보에 의해 특정되는 기 복호화된 서브 블록으로 결정될 수 있다.
다른 예로, 서브 블록의 움직임 벡터가 서브 블록이 속한 코딩 블록 또는 변환 블록의 경계를 벗어나는 것을 허용할 수도 있다.
인트라 예측을 수행 결과로 예측 블록이 생성되면, 예측 블록에 포함된 예측 샘플들 각각의 위치에 기초하여, 예측 샘플들을 업데이트 할 수 있다. 이와 같은 업데이트 방법을 샘플 포지션 기반 인트라 가중 예측 방법(또는, Position Dependent Prediction Combination, PDPC)이라 호칭할 수 있다.
PDPC를 사용할 것인지 여부는 현재 블록의 크기, 형태, 인트라 예측 모드, 현재 블록의 참조 샘플 라인, 현재 블록의 크기, 또는 컬러 성분을 고려하여 결정될 수 있다. 일 예로, 현재 블록의 인트라 예측 모드가 플래너, DC, 수직 방향, 수평 방향, 수직 방향보다 인덱스 값이 작은 모드 또는 수평 방향보다 인덱스 값이 큰 모드 중 적어도 하나인 경우에 PDPC가 사용될 수 있다. 또는, 현재 블록의 너비 또는 높이 중 적어도 하나가 4보다 큰 경우에 한하여, PDPC가 사용될 수 있다. 또는, 현재 블록의 참조 픽처 라인의 인덱스가 0인 경우에 한하여, PDPC가 사용될 수 있다. 또는 현재 블록의 참조 픽처 라인의 인덱스가 기 정의된 값 이상인 경우에 한하여, PDPC가 사용될 수 있다. 또는, 휘도 성분에 한하여 PDPC가 사용될 수 있다. 또는 상기 열거된 조건 중 둘 이상을 만족하는지 여부에 따라, PDPC의 사용 여부가 결정될 수 있다.
또는, 서브 파티션 인트라 부호화 방법이 이용되었는지 여부에 따라, PDPC의 사용 여부가 결정될 수 있다. 일 예로, 코딩 블록 또는 변환 블록에 서브 파티션 인트라 부호화 방법이 적용된 경우, PDPC가 이용되지 않도록 설정될 수 있다. 또는, 코딩 블록 또는 변환 블록에 서브 파티션 인트라 부호화 방법이 적용된 경우, 복수 서브 블록들 중 적어도 하나에 PDPC를 적용할 수 있다. 이때, PDPC의 적용 대상인 서브 블록은, 코딩 블록 또는 서브 블록의 크기, 형태, 위치, 인트라 예측 모드 또는 참조 샘플 라인 인덱스 중 적어도 하나를 기초로 결정될 수 있다. 일 예로, 코딩 블록의 상단 및/또는 좌측 경계에 인접하는 서브 블록 또는, 코딩 블록의 하단 및/또는 우측 경계에 인접하는 서브 블록에 PDPC를 적용할 수 있다. 또는, 서브 블록의 크기 또는 형태에 기초하여, 코딩 블록에 포함된 모든 서브 블록에 PDPC를 적용하거나, 코딩 블록에 포함된 모든 서브 블록에 PDPC를 적용하지 않도록 설정할 수도 있다. 또 다른 예로, 코딩 블록 내 모든 서브 블록에 PDPC를 적용할 수도 있다.
또는, 코딩 블록 또는 변환 블록을 분할하여 생성된 서브 블록들의 크기, 형태, 인트라 예측 모드 또는 참조 픽처 인덱스 중 적어도 하나가 기 설정된 조건을 만족하는지 여부에 따라, 서브 블록별로 PDPC 적용 여부를 결정할 수 있다. 일 예로, 서브 블록의 너비 또는 높이 중 적어도 하나가 4보다 큰 경우에는, 서브 블록에 PDPC를 적용할 수 있다.
다른 예로, 비트스트림을 통해 PDPC가 적용되는지 여부를 나타내는 정보가 시그날링될 수 있다.
또는, 현재 블록의 크기, 형태, 인트라 예측 모드 또는 예측 샘플의 위치 중 적어도 하나에 기초하여, PDPC가 적용되는 영역을 결정할 수 있다. 일 예로, 현재 블록의 인트라 예측 모드가 수직 방향보다 큰 인덱스를 가질 경우, x축 좌표 또는 y축 좌표 중 적어도 하나가 문턱값보다 큰 예측 샘플은 보정되지 않고, x축 좌표 y축 좌표가 문턱값 이하인 예측 샘플에 대해서만 보정이 수행될 수 있다. 또는, 현재 블록의 인트라 예측 보드가 수평 방향보다 작은 인덱스를 가질 경우, x축 좌표 또는 y축 좌표 중 적어도 하나가 문턱값보다 큰 예측 샘플을 보정되지 않고, x축 좌표 또는 y축 좌표가 문턱값 이하인 예측 샘플에 대해서만 보정이 수행될 수 있다. 이때, 문턱값은, 현재 블록의 크기, 형태 또는 인트라 예측 모드 중 적어도 하나를 기초로 결정될 수 있다.
인트라 예측 샘플을 통해 예측 샘플이 획득되면, 획득된 예측 샘플의 위치를 기반으로, 상기 예측 샘플을 보정하는데 이용되는 참조 샘플을 결정할 수 있다. 설명의 편의를 위해, 후술되는 실시예에서는, 예측 샘플을 보정하는데 이용되는 참조 샘플을 PDPC 참조 샘플이라 호칭하기로 한다. 아울러, 인트라 예측을 통해 획득된 예측 샘플을 제1 예측 샘플이라 호칭하고, 제1 예측 샘플을 보정하여 획득되는 예측 샘플을 제2 예측 샘플이라 호칭하기로 한다.
도 22는 PDPC의 적용 양상을 나타낸 도면이다.
적어도 하나의 PDPC 참조 샘플을 이용하여, 제1 예측 샘플을 보정할 수 있다. PDPC 참조 샘플은, 현재 블록의 좌측 상단에 코너에 인접하는 참조 샘플, 현재 블록의 상단에 위치하는 상단 참조 샘플 또는 현재 블록의 좌측에 위치하는 좌측 참조 샘플 중 적어도 하나를 포함할 수 있다.
현재 블록의 참조 샘플 라인에 속한 참조 샘플들 중 적어도 하나를 PDPC 참조 샘플로 설정할 수 있다. 또는, 현재 블록의 참조 샘플 라인과 무관하게, 인덱스 0인 참조 샘플 라인에 속한 참조 샘플들 중 적어도 하나를 PDPC 참조 샘플로 설정할 수 있다. 일 예로, 제1 예측 샘플이 인덱스 1 또는 인덱스 2인 참조 샘플 라인에 포함된 참조 샘플을 이용하여 획득되었다 하더라도, 제2 예측 샘플은 인덱스 0인 참조 샘플 라인에 포함된 참조 샘플을 이용하여 획득될 수 있다.
제1 예측 샘플을 보정하는데 이용되는 PDPC 참조 샘플들의 개수 또는 위치는 현재 블록의 인트라 예측 모드, 현재 블록의 크기, 현재 블록의 형태 또는 제1 예측 샘플의 위치 중 적어도 하나를 고려하여 결정될 수 있다.
일 예로, 현재 블록의 인트라 예측 모드가 플래너 또는 DC 모드인 경우, 상단 참조 샘플 및 좌측 참조 샘플을 이용하여 제2 예측 샘플을 획득할 수 있다. 이때, 상단 참조 샘플은 제1 예측 샘플에 수직인 참조 샘플(예컨대, x 좌표가 동일한 참조 샘플)이고, 좌측 참조 샘플은, 제1 예측 샘플에 수평인 참조 샘플(예컨대, y 좌표가 동일한 참조 샘플)일 수 있다.
현재 블록의 인트라 예측 모드가 수평 방향 인트라 예측 모드인 경우, 상단 참조 샘플을 이용하여 제2 예측 샘플을 획득할 수 있다. 이때, 상단 참조 샘플은 제1 예측 샘플에 수직인 참조 샘플일 수 있다.
현재 블록의 인트라 예측 모드가 수직 방향 인트라 예측 모드인 경우, 좌측 참조 샘플을 이용하여 제2 예측 샘플을 획득할 수 있다. 이때, 좌측 참조 샘플은 제1 예측 샘플에 수평인 참조 샘플일 수 있다.
현재 블록의 인트라 예측 모드가 좌측 하단 대각 방향 또는 우측 상단 대각 방향 인트라 예측 모드인 경우, 좌측 상단 참조 샘플, 상단 참조 샘플 및 좌측 참조 샘플을 기초로 제2 예측 샘플을 획득할 수 있다. 좌측 상단 참조 샘플은 현재 블록의 좌측 상단 코너에 인접하는 참조 샘플(예컨대, (-1, -1) 위치의 참조 샘플)일 수 있다. 상단 참조 샘플은 제1 예측 샘플의 우측 상단 대각 방향에 위치하는 참조 샘플이고, 좌측 참조 샘플은 제1 예측 샘플의 좌측 하단 대각 방향에 위치하는 참조 샘플일 수 있다.
요약하면, 제1 예측 샘플의 위치가 (x, y)일 경우, R(-1, -1)이 좌측 상단 참조 샘플로 설정되고, R(x+y+1, -1) 또는 R(x, -1)이 상단 참조 샘플로 설정될 수 있다. 또한, R(-1, x+y+1) 또는 R(-1, y)가 좌측 참조 샘플로 설정될 수 있다.
다른 예로, 현재 블록의 형태 또는 와이드 앵글 인트라 모드가 적용되었는지 여부 중 적어도 하나를 고려하여, 좌측 참조 샘플 또는 상단 참조 샘플의 위치를 결정할 수 있다.
구체적으로, 현재 블록의 인트라 예측 모드가 와이드 앵글 인트라 예측 모드인 경우, 제1 예측 샘플의 대각 방향에 위치하는 참조 샘플로부터 오프셋만큼 이격된 참조 샘플이 PDPC 참조 샘플로 설정될 수 있다. 일 예로, 상단 참조 샘플 R(x+y+k+1, -1)과 좌측 참조 샘플 R(-1, x+y-k+1)이 PDPC 참조 샘플로 설정될 수 있다.
이때, 오프셋 k는 와이드 앵글 인트라 예측 모드에 기초하여 결정될 수 있다. 수학식 8 및 수학식 9는 와이드 앵글 인트라 예측 모드에 기초한 오프셋을 유도하는 예를 나타낸다.
제2 예측 샘플은, 제1 예측 샘플과 PDPC 참조 샘플들 사이의 가중합 연산을 기초로 결정될 수 있다. 일 예로, 제2 예측 샘플은 다음의 수학식 10을 기초로 획득될 수 있다.
상기 수학식 10에서, RL은 좌측 참조 샘플을 나타내고, RT는 상단 참조 샘플을 나타내며, RTL은 좌측 상단 참조 샘플을 나타낸다. pred(x,y)는 (x,y) 위치의 예측 샘플을 나타낸다. wL은 좌측 참조 샘플에 부여되는 가중치를 나타내고, wT는 상단 참조 샘플에 부여되는 가중치를 나타내며, wTL은 좌측 상단 참조 샘플에 부여되는 가중치를 나타낸다. 제1 예측 샘플에 부여되는 가중치는 최대값에서 참조 샘플들에 부여되는 가중치들을 차감하여 유도될 수 있다. 설명의 편의를 위해, PDPC 참조 샘플에 할당되는 가중치를 PDPC 가중치라 호칭하기로 한다.
각 참조 샘플에 할당되는 가중치는 현재 블록의 인트라 예측 모드 또는 제1 예측 샘플의 위치 중 적어도 하나를 기초로 결정될 수 있다.
일 예로, wL, wT 또는 wTL 중 적어도 하나는 예측 샘플의 x축 좌표값 또는 y축 좌표값 중 적어도 하나와 비례 또는 반비례 관계에 있을 수 있다. 또는, wL, wT 또는 wTL 중 적어도 하나는 현재 블록의 너비 또는 높이 중 적어도 하나와 비례 또는 반비례 관계에 있을 수 있다.
현재 블록의 인트라 예측 모드가 DC인 경우, PDPC 가중치들은 다음의 수학식 11과 같이 결정될 수 있다.

상기 수학식 11에서, x 및 y는 제1 예측 샘플의 위치를 나타낸다.
상기 수학식 11에서 비트 시프트 연산에 이용되는 변수 shift는 현재 블록의 너비 또는 높이를 기초로 유도될 수 있다. 일 예로, 변수 shift는 다음 수학식 12 또는 수학식 13을 기초로 유도될 수 있다.
또는, 현재 블록의 인트라 방향 파라미터를 고려하여, 변수 shift를 유도할 수도 있다.
변수 shift를 유도하는데 이용되는 파라미터의 개수 또는 종류는 현재 블록의 인트라 예측 모드에 따라 상이하게 결정될 수 있다. 일 예로, 현재 블록의 인트라 예측 모드가 플래너, DC, 수직 방향 또는 수평 방향인 경우, 수학식 12 또는 수학식 13에 나타난 예에서와 같이, 현재 블록의 너비 및 높이를 이용하여 변수 shift를 유도할 수 있다. 현재 블록의 인트라 예측 모드가 수직 방향의 인트라 예측 모드보다 큰 인덱스를 갖는 인트라 예측 모드인 경우, 현재 블록의 높이와 인트라 방향 파라미터를 이용하여 변수 shift를 유도할 수 있다. 현재 블록의 인트라 예측 모드가 수평 방향의 인트라 예측 모드보다 작은 인덱스를 갖는 인트라 예측 모드인 경우, 현재 블록의 너비와 인트라 방향 파라미터를 이용하여 변수 shift를 유도할 수 있다.
현재 블록의 인트라 예측 모드가 플래너인 경우, wTL의 값을 0으로 설정할 수 있다. wL 및 wT 는 다음의 수학식 14를 기초로 유도될 수 있다.
현재 블록의 인트라 예측 모드가 수평 방향 인트라 예측 모드인 경우에는 wT를 0으로 설정하고, wTL과 wL을 동일하게 설정할 수 있다. 반면, 현재 블록의 인트라 예측 모드가 수직 방향 인트라 예측 모드인 경우에는 wL을 0으로 설정하고, wTL과 wT를 동일하게 설정할 수 있다.
현재 블록의 인트라 예측 모드가 수직 방향의 인트라 예측 모드 보다 큰 인덱스값을 갖는 우측 상단 방향을 향하는 인트라 예측 모드인 경우, 다음의 수학식 15에서와 같이 PDPC 가중치들을 유도할 수 있다.

반면, 현재 블록의 인트라 예측 모드가 수평 방향의 인트라 예측 모드보다 작은 인덱스값을 갖는 좌측 하단 방향을 향하는 인트라 에측 모드인 경우, 다음의 수학식 16에서와 같이 PDPC 가중치들을 유도할 수 있다.

상술한 실시예에서와 같이, 예측 샘플의 위치 x 및 y를 기초로, PDPC 가중치들이 결정될 수 있다.
다른 예로, 서브 블록 단위로 PDPC 참조 샘플들 각각에 할당되는 가중치를 결정할 수도 있다. 서브 블록에 포함된 예측 샘플들은 동일한 PDPC 가중치들을 공유할 수 있다.
가중치 결정의 기본 단위인 서브 블록의 크기는 부호화기 및 복호화기에서 기 정의된 것일 수 있다. 일 예로, 2x2 크기 또는 4x4 크기의 서브 블록들 각각에 대해 가중치를 결정할 수 있다.
또는, 현재 블록의 크기 또는 형태에 따라, 서브 블록의 크기, 형태 또는 개수를 결정할 수 있다. 일 예로, 코딩 블록의 크기와 무관하게, 코딩 블록을 4개의 서브 블록들로 분할할 수 있다. 또는, 코딩 블록의 크기에 따라, 코딩 블록을 4개 또는 16개의 서브 블록들로 분할할 수 있다.
또는, 현재 블록의 인트라 예측 모드에 기초하여, 서브 블록의 크기, 형태 또는 개수가 결정될 수도 있다. 일 예로, 현재 블록의 인트라 예측 모드가 수평 방향인 경우에는 N개의 열(또는 N개의 행)을 하나의 서브 블록으로 설정하는 반면, 현재 블록의 인트라 예측 모드가 수직 방향인 경우에는 N개의 행(또는 N개의 열)을 하나의 서브 블록으로 설정할 수 있다.)
수학식 17 내지 19은 2x2 크기의 서브 블록에 대한 PDPC 가중치를 결정하는 예를 나타낸다. 수학식 17은 현재 블록의 인트라 예측 모드가 DC 모드인 경우를 예시한 것이다.

상기 수학식 17에서, K는 서브 블록의 크기를 기초로 결정될 수 있다.
수학식 18은 현재 블록의 인트라 예측 모드가 수직 방향의 인트라 예측 모드 보다 큰 인덱스값을 갖는 우측 상단 방향을 향하는 인트라 예측 모드인 경우를 예시한 것이다.

수학식 19는 현재 블록의 인트라 예측 모드가 수평 방향의 인트라 예측 모드 보다 작은 인덱스값을 갖는 좌측 하단 방향을 향하는 인트라 예측 모드인 경우를 예시한 것이다.

상기 수학식 17 내지 19에서, x 및 y는 서브 블록 내 기준 샘플의 위치를 나타낸다. 기준 샘플은 서브 블록의 좌측 상단에 위치하는 샘플, 서브 블록의 중앙에 위치하는 샘플, 또는 서브 블록의 우측 하단에 위치하는 샘플 중 어느 하나일 수 있다.
수학식 20 내지 22는 4x4 크기의 서브 블록에 대한 PDPC 가중치를 결정하는 예를 나타낸다. 수학식 20은 현재 블록의 인트라 예측 모드가 DC 모드인 경우를 예시한 것이다.

수학식 21은 현재 블록의 인트라 예측 모드가 수직 방향의 인트라 예측 모드 보다 큰 인덱스값을 갖는 우측 상단 방향을 향하는 인트라 예측 모드인 경우를 예시한 것이다.

수학식 22는 현재 블록의 인트라 예측 모드가 수평 방향의 인트라 예측 모드 보다 작은 인덱스값을 갖는 좌측 하단 방향을 향하는 인트라 예측 모드인 경우를 예시한 것이다.

상술한 실시예들에서는, 제1 예측 샘플 또는 서브 블록에 포함된 예측 샘플들의 위치를 고려하여, PDPC 가중치들을 결정하는 것으로 설명하였다. 현재 블록의 형태를 더 고려하여, PDPC 가중치들을 결정할 수도 있다.
일 예로, DC 모드인 경우, 현재 블록이 너비가 높이보다 더 큰 비정방형인지 혹은 높이가 너비보다 더 큰 비정방형인지 여부에 따라, PDPC 가중치의 유도 방법이 상이할 수 있다.
수학식 23은 현재 블록이 너비가 높이보다 더 큰 비정방형인 경우, PDPC 가중치를 유도하는 예를 나타내고, 수학식 24는 현재 블록이 높이가 너비보다 더 큰 비정방형인 경우, PDPC 가중치를 유도하는 예를 나타낸다.


현재 블록이 비정방형인 경우, 와이드 앵글 인트라 예측 모드를 이용하여 현재 블록을 예측할 수 있다. 이처럼, 와이드 앵글 인트라 예측 모드가 적용된 경우에도, PDPC를 적용하여 제1 예측 샘플을 업데이트할 수 있다.
현재 블록에 와이드 앵글 인트라 예측이 적용된 경우, 코딩 블록의 형태를 고려하여, PDPC 가중치를 결정할 수 있다.
일 예로, 현재 블록이 너비가 높이보다 큰 비정방형인 경우, 제1 예측 샘플의 위치에 따라, 제1 예측 샘플의 좌측 하단에 위치하는 좌측 참조 샘플보다 제1 예측 샘플의 우측 상단에 위치하는 상단 참조 샘플이 제1 예측 샘플에 더 가까운 경우가 발생할 수 있다. 이에 따라, 제1 예측 샘플을 보정하는데 있어서, 상단 참조 샘플에 적용되는 가중치가 좌측 참조 샘플에 적용되는 가중치보다 큰 값을 갖도록 설정할 수 있다.
반면, 현재 블록이 높이가 너비보다 큰 비정방형인 경우, 제1 예측 샘플의 위치에 따라, 제1 예측 샘플의 우측 상단에 위치하는 상단 참조 샘플보다 제1 예측 샘플의 좌측 하단에 위치하는 좌측 참조 샘플이 제1 예측 샘플에 더 가까운 경우가 발생할 수 있다. 이에 따라, 제1 예측 샘플을 보정하는데 있어서, 좌측 참조 샘플에 적용되는 가중치가 상단 참조 샘플에 적용되는 가중치보다 큰 값을 갖도록 설정할 수 있다.
수학식 25는 현재 블록의 인트라 예측 모드가 66보다 인덱스가 큰 와이드 앵글 인트라 예측 모드인 경우, PDPC 가중치를 유도하는 예를 나타낸다.

수학식 26은 현재 블록의 인트라 예측 모드가 0보다 인덱스가 작은 와이드 앵글 인트라 예측 모드인 경우, PDPC 가중치를 유도하는 예를 나타낸다.

현재 블록의 비율을 기초로, PDPC 가중치를 결정할 수도 있다. 현재 블록의 비율은 현재 블록의 너비와 세로 비율을 나타내며, 다음의 수학식 27과 같이 정의될 수 있다.
현재 블록의 인트라 예측 모드에 따라, PDPC 가중치를 유도하는 방법을 가변적으로 결정할 수 있다.
일 예로, 수학식 28 및 수학식 29는 현재 블록의 인트라 예측 모드가 DC인 경우, PDPC 가중치를 유도하는 예를 나타낸다. 구체적으로, 수학식 28은 현재 블록이 너비가 높이보다 큰 비정방형인 경우의 예이고, 수학식 29는 현재 블록이 높이가 너비보다 큰 비정방형인 경우의 예이다.


수학식 30은 현재 블록의 인트라 예측 모드가 66보다 인덱스가 큰 와이드 앵글 인트라 예측 모드인 경우, PDPC 가중치를 유도하는 예를 나타낸다.

수학식 31은 현재 블록의 인트라 예측 모드가 0보다 인덱스가 작은 와이드 앵글 인트라 예측 모드인 경우, PDPC 가중치를 유도하는 예를 나타낸다.

원본 영상에서 예측 영상을 차분하여 유도된 잔차 영상을 유도할 수 있다. 이때, 잔차 영상을 주파수 도메인으로 변경하였을 때, 주파수 성분들 중 고주파 성분들을 제거하더라도, 영상의 주관적 화질은 크게 떨어지지 않는다. 이에 따라, 고주파 성분들의 값을 작게 변환하거나, 고주파 성분들의 값을 0으로 설정한다면, 시각적 왜곡이 크게 발생하지 않으면서도 압축 효율을 증가시킬 수 있는 효과가 있다. 위 특성을 반영하여, 잔차 영상을 2차원 주파수 성분들로 분해하기 위해 현재 블록을 변환할 수 있다. 상기 변환은 DCT(Discrete Cosine Transform) 또는 DST(Discrete Sine Tranform) 등의 변환 기법을 이용하여 수행될 수 있다.
DCT는 코사인 변환을 이용하여, 잔차 영상을 2차원 주파수 성분으로 분해(또는 변환)하는 것이고, DST는 사인 변환을 이용하여, 잔차 영상을 2차원 주파수 성분으로 분해(또는 변환)하는 것이다. 잔차 영상의 변환 결과, 주파수 성분들은 기저 영상으로 표현될 수 있다. 일 예로, NxN 크기의 블록에 대해 DCT 변환을 수행하는 경우, N2 개의 기본 패턴 성분이 획득될 수 있다. 변환을 통해 NxN 크기 블록에 포함된 기본 패턴 성분들 각각의 크기가 획득될 수 있다. 이용된 변환 기법에 따라, 기본 패턴 성분의 크기를 DCT 계수 또는 DST 계수라 호칭할 수 있다.
변환 기법 DCT는 0이 아닌 저주파 성분들이 많이 분포하는 영상을 변환하는데 주로 이용된다. 변환 기법 DST는 고주파 성분들이 많이 분포하는 영상에 주로 이용된다.
DCT 또는 DST 이외의 변환 기법을 사용하여 잔차 영상을 변환할 수도 있다.
이하, 잔차 영상을 2차원 주파수 성분들오 변환하는 것을 2차원 영상 변환이라 호칭하기로 한다. 아울러, 변환 결과 획득된 기본 패턴 성분들의 크기를 변환 계수라 호칭하기로 한다. 일 예로, 변환 계수는 DCT 계수 또는 DST 계수를 의미할 수 있다. 후술될 제1 변환 및 제2 변환이 모두 적용된 경우, 변환 계수는 제2 변환의 결과로 생성된 기본 패턴 성분의 크기를 의미할 수 있다.
변환 기법은 블록 단위로 결정될 수 있다. 변환 기법은 현재 블록의 예측 부호화 모드, 현재 블록의 크기 또는 현재 블록의 크기 중 적어도 하나를 기초로 결정될 수 있다. 일 예로, 현재 블록이 인트라 에측 모드로 부호화되고, 현재 블록의 크기가 NxN보다 작은 경우에는 변환 기법 DST를 사용하여 변환이 수행될 수 있다. 반면, 상기 조건을 만족하지 않는 경우, 변환 기법 DCT를 사용하여 변환이 수행될 수 있다.
잔차 영상 중 일부 블록에 대해서는 2차원 영상 변환이 수행되지 않을 수도 있다. 2차원 영상 변환을 수행하지 않는 것을 변환 스킵(Transform Skip)이라 호칭할 수 있다. 변환 스킵이 적용된 경우, 변환이 수행되지 않는 잔차값들을 대상으로 양자화가 적용될 수 있다.
DCT 또는 DST를 이용하여 현재 블록을 변환한 뒤, 변환된 현재 블록을 다시 변환할 수 있다. 이때, DCT 또는 DST에 기초한 변환을 제1 변환이라 정의하고, 제1 변환이 적용된 블록을 다시 변환하는 것을 제2 변환이라 정의할 수 있다.
제1 변환은 복수개의 변환 코어 후보들 중 어느 하나를 이용하여 수행될 수 있다. 일 예로, DCT2, DCT8 또는 DCT7 중 어느 하나를 이용하여 제1 변환이 수행될 수 있다.
수평 방향 및 수직 방향에 대해 상이한 변환 코어가 사용될 수도 있다. 수평 방향의 변환 코어 및 수직 방향의 변환 코어의 조합을 나타내는 정보가 비트스트림을 통해 시그날링될 수도 있다.
제1 변환 및 제2 변환의 수행 단위가 상이할 수 있다. 일 예로, 8x8 블록에 대해 제1 변환을 수행하고, 변환된 8x8 블록 중 4x4 크기의 서브 블록에 대해 제2 변환을 수행할 수 있다. 이때, 제2 변환이 수행되지 않는 잔여 영역들의 변환 계수를 0으로 설정할 수도 있다.
또는, 4x4 블록에 대해 제1 변환을 수행하고, 변환된 4x4 블록을 포함하는 8x8 크기의 영역에 대해 제2 변환을 수행할 수도 있다.
제2 변환의 수행 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다.
또는, 수평 방향 변환 코어와 수직 방향 변환 코어가 동일한지 여부에 기초하여, 제2 변환의 수행여부가 결정될 수 있다. 일 예로, 수평 방향 변환 코어와 수직 방향 변환 코어가 동일한 경우에만, 제2 변환이 수행될 수 있다. 또는, 수평 방향 변환 코어와 수직 방향 변환 코어가 상이한 경우에만, 제2 변환이 수행될 수 있다.
또는, 수평 방향의 변환 및 수직 방향의 변환이 기 정의된 변환 코어를 이용된 경우에 한하여, 제2 변환이 허용될 수 있다. 일 예로, 수평 방향의 변환 및 수직 방향의 변환에 DCT2 변환 코어가 사용된 경우에, 제2 변환이 허용될 수 있다.
또는, 현재 블록의 논 제로 변환 계수의 개수를 기초로 제2 변환의 수행 여부를 결정할 수 있다. 일 예로, 현재 블록의 논 제로 변환 계수가 문턱값보다 작거나 같은 경우, 제2 변환을 사용하지 않도록 설정하고, 현재 블록의 논 제로 변환 계수가 문턱값보다 큰 경우, 제2 변환을 사용하도록 설정될 수 있다. 현재 블록이 인트라 예측으로 부호화된 경우에 한하여, 제2 변환을 사용하도록 설정될 수도 있다.
현재 블록의 형태에 기초하여, 제2 변환이 수행될 서브 블록의 크기 또는 형태를 결정할 수 있다.
도 23 및 도 24는 제2 변환이 수행될 서브 블록을 나타낸 도면이다.
현재 블록이 정방형인 경우, 제1 변환이 수행된 이후, 현재 블록 좌측 상단의 NxN 크기의 서브 블록을 대상으로 제2 변환이 수행될 수 있다. 일 예로, 현재 블록이 8x8 크기의 코딩 블록인 경우, 현재 블록에 대해 제1 변환을 수행한 뒤, 현재 블록의 좌측 상단 4x4 크기의 서브 블록을 대상으로 제2 변환을 수행할 수 있다 (도 23 참조).
현재 블록이 너비가 높이보다 4배 이상 큰 비정방형인 경우, 제1 변환이 수행된 이후, 현재 블록 좌측 상단의 (kN)x(4kN) 크기의 서브 블록을 대상으로 제2 변환이 수행될 수 있다. 일 예로, 현재 블록이 16x4 크기의 비정방형인 경우, 현재 블록에 대해 제1 변환을 수행한 뒤, 현재 블록의 좌측 상단 2x8 크기의 서브 블록을 대상으로 제2 변환을 수행할 수 있다 (도 24의 (a) 참조).
현재 블록이 높이가 너비보다 4배 이상 큰 비정방형인 경우, 제1 변환이 수행된 이후, 현재 블록 좌측 상단의 (4kN)x(kN) 크기의 서브 블록을 대상으로 제2 변환이 수행될 수 있다. 일 예로, 현재 블록이 16x4 크기의 비정방형인 경우, 현재 블록에 대해 제1 변환을 수행한 뒤, 현재 블록의 좌측 상단 2x8 크기의 서브 블록을 대상으로 제2 변환을 수행할 수 있다 (도 24의 (b) 참조).
복호화기에서는 제2 변환의 역변환(제2 역변환)을 수행하고, 그 수행 결과에 제1 변환의 역변환(제1 역변환)을 수행할 수 있다. 상기 제2 역변환 및 제1 역변환의 수행 결과, 현재 블록에 대한 잔차 신호들이 획득될 수 있다.
현재 블록의 변환 타입을 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보는 수평 방향에 대한 변환 타입 및 수직 방향에 대한 변환 타입의 조합들 중 하나를 나타내는 인덱스 정보 tu_mts_idx일 수 있다.
인덱스 정보 tu_mts_idx에 의해 특정되는 변환 타입 후보들에 기초하여, 수직 방향에 대한 변환 코어 및 수평 방향에 대한 변환 코어가 결정될 수 있다. 표 7 및 표 8은 tu_mts_idx에 따른 변환 타입 조합들을 나타낸 것이다.
| tu_mts_idx | transform type | |
| horizontal | vertical | |
| 0 | SKIP | SKIP |
| 1 | DCT-II | DCT-II |
| 2 | DST-VII | DST-VII |
| 3 | DCT-VIII | DST-VII |
| 4 | DST-VII | DCT-VIII |
| 5 | DCT-VIII | DCT-VIII |
| tu_mts_idx | transform type | |
| horizontal | vertical | |
| 0 | DCT-II | DCT-II |
| 1 | SKIP | SKIP |
| 2 | DST-VII | DST-VII |
| 3 | DCT-VIII | DST-VII |
| 4 | DST-VII | DCT-VIII |
| 5 | DCT-VIII | DCT-VIII |
변환 타입은 DCT2, DST7, DCT8 또는 변환 스킵 중 어느 하나로 결정될 수 있다. 또는, 변환 스킵을 제외하고, 변환 코어들만을 이용하여 변환 타입 조합 후보를 구성할 수도 있다.표 7이 이용되는 경우, tu_mts_idx가 0이면, 수평 방향 및 수직 방향에 변환 스킵이 적용될 수 있다. tu_mts_idx가 1이면, 수평 방향과 수직 방향에 DCT2가 적용될 수 있다. tu_mts_idx가 3이면 수평 방향에 DCT8을 적용하고, 수직 방향에 DCT7을 적용할 수 있다.
표 8이 이용되는 경우, tu_mts_idx가 0이면, 수평 방향 및 수직 방향에 DCT2가 적용될 수 있다. tu_mts_idx가 1이면, 수평 방향과 수직 방향에 변환 스킵이 적용될 수 있다. tu_mts_idx가 3이면 수평 방향에 DCT8을 적용하고, 수직 방향에 DCT7을 적용할 수 있다.
현재 블록의 크기, 형태 또는 논 제로 계수의 개수 중 적어도 하나에 기초하여 인덱스 정보의 부호화 여부를 결정할 수 있다. 일 예로, 논 제로 계수의 수가 문턱값과 같거나 작은 경우, 인덱스 정보를 시그날링하지 않고, 현재 블록에 디폴트 변환 타입을 적용할 수 있다. 여기서, 디폴트 변환 타입은 DST7 일 수 있다. 또는, 현재 블록의 크기, 형태 또는 인트라 예측 모드에 따라 디폴트 모드가 상이할 수 있다.
문턱값은 현재 블록의 크기 또는 형태에 기초하여 결정될 수 있다. 일 예로, 현재 블록의 크기가 32x32 보다 작거나 같은 경우에는 문턱값을 2로 설정하고, 현재 블록이 32x32 보다 큰 경우에는(예컨대, 현재 블록이, 32x64 또는 64x32 크기의 코딩 블록인 경우), 문턱값을 4로 설정할 수 있다.
복수개의 룩업 테이블이 부호화기/복호화기에 기 저장될 수 있다. 복수개의 룩업 테이블은 변환 타입 조합 후보들에 할당되는 인덱스 값, 변환 타입 조합 후보들의 종류 또는 변환 타입 조합 후보들의 개수 중 적어도 하나가 상이할 수 있다.
현재 블록의 크기, 형태, 예측 부호화 모드, 인트라 예측 모드, 2차 변환의 적용 여부 또는 이웃 블록에 변환 스킵이 적용되었는지 여부 중 적어도 하나에 기초하여, 현재 블록에 대한 룩업 테이블을 선택할 수 있다.
일 예로, 현재 블록의 크기가 4x4 이하인 경우 또는 현재 블록이 인터 예측으로 부호화된 경우에는, 표 7의 룩업 테이블을 이용하고, 현재 블록의 크기가 4x4 보다 큰 경우 또는 현재 블록이 인트라 예측으로 부호화된 경우에는 표 8의 룩업 테이블을 이용할 수 있다.
또는, 복수의 룩업 테이블 중 어느 하나를 가리키는 정보가 비트스트림을 통해 시그날링될 수 있다. 복호화기는 상기 정보에 기초하여 현재 블록에 대한 룩업 테이블을 선택할 수 있다.
다른 예로, 현재 블록의 크기, 형태, 예측 부호화 모드, 인트라 예측 모드, 2차 변환의 적용 여부 또는 이웃 블록에 변환 스킵이 적용되었는지 여부 중 적어도 하나에 기초하여, 변환 타입 조합 후보에 할당되는 인덱스가 적응적으로 결정될 수 있다. 일 예로, 현재 블록의 크기가 4x4 인 경우 변환 스킵에 할당되는 인덱스가 현재 블록의 크기가 4x4 보다 큰 경우 변환 스킵에 할당되는 인덱스보다 더 작은 값을 가질 수 있다. 구체적으로, 현재 블록의 크기가 4x4인 경우, 변환 스킵에 인덱스 0을 할당하고, 현재 블록이 4x4 보다 크고 16x16 이하인 경우, 변환 스킵에 0보다 큰 인덱스(예컨대, 인덱스 1)를 할당할 수 있다. 현재 블록이 16x16 보다 큰 경우, 변환 스킵의 인덱스에 최대값(예컨대, 5)를 할당할 수 있다.
또는, 현재 블록이 인터 예측으로 부호화된 경우, 변환 스킵에 인덱스 0을 할당할 수 있다. 현재 블록이 인트라 예측으로 부호화된 경우, 변환 스킵에 0보다 큰 인덱스(예컨대, 인덱스 1)를 할당할 수 있다.
또는, 현재 블록이 인터 예측으로 부호화된 4x4 크기의 블록인 경우, 변환 스킵에 인덱스 0을 할당할 수 있다. 반면, 현재 블록이 인터 예측으로 부호화되지 않았거나, 현재 블록이 4x4 보다 큰 경우, 변환 스킵에 0보다 큰 값의 인덱스(예컨대, 인덱스 1)를 할당할 수 있다.
표 7 및 표 8에 열거된 변환 타입 조합 후보들과 상이한 변환 타입 조합 후보들이 정의되어 사용될 수도 있다. 일 예로, 수평 방향 변환 또는 수직 방향 변환 중 어느 하나에 변환 스킵을 적용하고, 다른 하나에는 DCT7, DCT8 또는 DST2 등의 변환 코어가 적용되는 변환 타입 조합 후보이 이용될 수 있다. 이때, 현재 블록의 크기(예컨대, 너비 및/또는 높이), 형태, 예측 부호화 모드 또는 인트라 예측 모드 중 적어도 하나에 기초하여 수평 방향 또는 수직 방향에 대한 변환 타입 후보로 변환 스킵을 사용할 것인지 여부가 결정될 수 있다.
또는, 특정 변환 타입 후보가 이용 가능한지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 수평 방향과 수직 방향에 대해 변환 스킵을 변환 타입 후보로 이용할 수 있는지 여부를 나타내는 플래그가 시그날링될 수 있다. 상기 플래그에 따라, 복수의 변환 타입 조합 후보들 중 특정 변환 타입 조합 후보가 포함되는지 여부가 결정될 수 있다.
또는, 특정 변환 타입 후보가 현재 블록에 적용되는지 여부가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 수평 방향과 수직 방향에 대해 DCT2를 적용할 것인지 여부를 나타내는 플래그 cu_mts_flag가 시그날링될 수 있다. cu_mts_flag의 값이 1인 경우, DCT2를 수직 방향 및 수평 방향에 대한 변환 코어로 설정할 수 있다. cu_mts_flag의 값이 0인 경우, DCT8 또는 DST7을 수직 방향 및 수평 방향에 대한 변환 코어로 설정할 수 있다. 또는, cu_mts_flag의 값이 0인 경우, 복수의 변환 타입 조합 후보들 중 어느 하나를 특정하는 정보 tu_mts_idx를 시그날링할 수 있다.
현재 블록이 너비가 높이보다 큰 비정방형 또는 높이가 너비보다 큰 비정방형인 경우, cu_mts_flag의 부호화를 생략하고, cu_mts_flag의 값이 0인 것으로 간주할 수도 있다.
현재 블록의 크기, 형태 또는 인트라 예측 모드에 따라, 이용 가능한 변환 타입 조합 후보들의 개수를 상이하게 설정할 수 있다. 일 예로, 현재 블록이 정방형인 경우에는 3개 이상의 변환 타입 조합 후보들을 사용하고, 현재 블록이 비정방형인 경우에는 2개의 변환 타입 조합 후보들을 사용할 수 있다. 또는, 현재 블록이 정방형인 경우에는, 변환 타입 조합 후보들 중 수평 방향에 대한 변환 타입 및 수직 방향에 대한 변환 타입이 상이한 변환 타입 조합 후보들만을 이용할 수 있다.
현재 블록이 이용할 수 있는 변환 타입 조합 후보들이 3개 이상인 경우, 변환 타입 조합 후보들 중 하나를 지시하는 인덱스 정보 tu_mts_idx를 시그날링할 수 있다. 반면, 현재 블록이 이용할 수 있는 변환 타입 조합 후보들이 2개인 경우, 변환 타입 조합 후보들 중 어느 하나를 지시하는 플래그 mts_flag를 시그날링할 수 있다. 다음 표 9는 현재 블록의 형태에 따른 변환 타입 조합 후보들을 특정하기 위한 정보들의 부호화 양상을 나타낸 것이다.
| residual_coding( x0, y0, log2TbWidth, log2TbHeight, cIdx ) { | Descriptor |
| ... | |
|
if( cu_mts_flag[ x0 ][ y0 ] && ( cIdx = = 0 ) && !transform_skip_flag[ x0 ][ y0 ][ cIdx ] && ( ( CuPredMode[ x0 ][ y0 ] = = MODE_INTRA && numSigCoeff > 2 ) | | ( CuPredMode[ x0 ][ y0 ] = = MODE_INTER ) ) ) { |
|
| if (cbHeight == cbWidth) { | |
| mts_idx[ x0 ][ y0 ] | ae(v) |
| } else { | |
| mts_flag[ x0 ][ y0 ] | u(1) |
| } | |
| } |
현재 블록의 형태에 따라, 변환 타입 조합 후보들의 인덱스들을 재정렬(또는 리오더링)할 수 있다. 일 예로, 현재 블록이 정방형인 경우, 변환 타입 조합 후보들에 할당되는 인덱스와 현재 블록이 비정방형인 경우 변환 타입 조합 후보들에 할당되는 인덱스가 상이할 수 있다. 일 예로, 현재 블록이 정방형인 경우에는 다음 표 10에 기초하여 변환 타입 조합을 선택하고, 현재 블록이 비정방형인 경우에는 다음 표 11에 기초하여 변환 타입 조합을 선택할 수 있다.
| mts_idx | INTRA | INTER | ||
| 수평방향 변환코어 | 수직방향 변환 코어 | 수평방향 변환 코어 | 수직방향 변환 코어 | |
| 0 | DST7 | DST7 | DCT8 | DCT8 |
| 1 | DCT8 | DST7 | DST7 | DCT8 |
| 2 | DST7 | DCT8 | DCT8 | DST7 |
| 3 | DCT8 | DCT8 | DST7 | DST7 |
| mts_idx | INTRA | INTER | ||
| 수평방향 변환 코어 | 수직방향 변환 코어 | 수평방향 변환 코어 | 수직방향 변환 코어 | |
| 0 | DCT8 | DST7 | DST7 | DCT8 |
| 1 | DST7 | DCT8 | DCT8 | DST7 |
| 2 | DST7 | DST7 | DST7 | DST7 |
| 3 | DCT8 | DCT8 | DST7 | DST7 |
현재 블록의 수평 방향 논 제로 계수의 개수 또는 수직 방향 논 제로 계수의 개수를 기초로 변환 타입을 결정할 수 있다. 여기서, 수평 방향 논 제로 계수의 개수는 1xN (여기서, N은 현재 블록의 너비)에 포함된 논 제로 계수의 개수를 나타내고, 수직 방향 논 제로 계수의 개수는 Nx1 (여기서, N은 현재 블록의 높이)에 포함된 논 제로 계수의 개수를 나타낸다. 수평 방향 논 제로 계수의 최대값이 문턱값보다 작거나 같은 경우에는, 수평 방향에 제1 변환 타입을 적용하고, 수평 방향 논 제로 계수의 최대값이 문턱값보다 큰 경우에는, 수평 방향에 제2 변환 타입을 적용할 수 있다. 수직 방향 논 제로 계수의 최대값이 문턱값보다 작거나 같은 경우에는, 수직 방향에 제1 변환 타입을 적용하고, 수직 방향 논 제로 계수의 최대값이 문턱값보다 큰 경우에는, 수직 방향에 제2 변환 타입을 적용할 수 있다. 도 25는 현재 블록의 변환 타입이 결정되는 예를 설명하기 위한 도면이다.
일 예로, 현재 블록이 인트라 예측으로 부호화되고, 현재 블록의 수평 방향 논 제로 계수의 최대값이 2이하인 경우(도 25의 (a) 참조), 수평 방향의 변환 타입을 DST7로 결정할 수 있다.
현재 블록이 인트라 예측으로 부호화되고 현재 블록의 수직 방향 논 제로 계수의 최대값이 2보다 큰 경우(도 25의 (b) 참조), DCT2 또는 DCT8을 수직 방향의 변환 타입으로 결정할 수 있다.
비트스트림으로부터 시그날링되는 정보에 기초하여 명시적으로 현재 블록의 변환 타입을 결정할 것인지 여부를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 시퀀스 레벨에서, 인트라 예측으로 부호화된 블록에 대해 명시적인 변환 타입 결정이 허용되는지 여부를 나타내는 정보 sps_explicit_intra_mts_flag 및/또는 인터 예측으로 부호화된 블록에 대해 명시적인 변환 타입 결정이 허용되는지 여부를 나타내는 정보 sps_explicit_inter_mts_flag가 시그날링될 수 있다.
명시적인 변환 타입 결정이 허용되는 경우, 비트스트림으로부터 시그날링되는 인덱스 정보 tu_mts_idx에 기초하여 현재 블록의 변환 타입을 결정할 수 있다. 반면, 명시적인 변환 타입 결정이 허용되지 않는 경우, 현재 블록의 크기, 형태, 서브 블록 단위의 변환이 허용되는지 여부 또는 0이 아닌 변환 계수를 포함하는 서브 블록의 위치 중 적어도 하나를 기초로 변환 타입이 결정될 수 있다. 일 예로, 현재 블록의 수평 방향 변환 타입은 현재 블록의 너비를 기초로 결정되고, 현재 블록의 수직 방향 변환 타입은 현재 블록의 높이를 기초로 결정될 수 있다. 예컨대, 현재 블록의 너비가 4 보다 작거나 16보다 큰 경우, 수평 방향의 변환 타입은 DCT2로 결정될 수 있다. 그렇지 않은 경우, 수평 방향의 변환 타입은 DST7로 결정될 수 있다. 현재 블록의 높이가 4보다 작거나 16보다 큰 경우, 수직 방향의 변환 타입은 DCT2로 결정될 수 있다. 그렇지 않은 경우, 수직 방향의 변환 타입은 DST7로 결정될 수 있다. 여기서, 수평 방향의 변환 타입 및 수직 방향의 변환 타입을 결정하기 위해, 너비 및 높이와 비교되는 문턱값은 현재 블록의 크기, 형태 또는 인트라 예측 모드 중 적어도 하나에 기초하여 결정될 수 있다.
또는, 현재 블록이 높이와 너비가 동일한 정방형인 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 동일하게 설정하는 한편, 현재 블록이 높이와 너비가 상이한 비정방형인 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 상이하게 설정할 수 있다. 일 예로, 현재 블록의 너비가 높이보다 큰 경우에는, 수평 방향의 변환 타입을 DST7로 결정하고, 수직 방향의 변환 타입을 DCT2로 결정할 수 있다. 현재 블록의 높이가 너비보다 큰 경우에는, 수직 방향의 변환 타입을 DST7으로 결정하고, 수평 방향의 변환 타입을 DCT2로 결정할 수 있다.
변환 타입 후보들의 개수 및/또는 종류 또는 변환 타입 조합 후보들의 개수 및/또는 종류는 명시적인 변환 타입 결정이 허용되는지 여부에 따라 상이할 수 있다. 일 예로, 명시적인 변환 타입 결정이 허용되는 경우, DCT2, DST7 및 DCT8가 변환 타입 후보들로서 이용될 수 있다. 이에 따라, 수평 방향 변환 타입 및 수직 방향 변환 타입 각각은 DCT2, DST8 또는 DCT8로 설정될 수 있다. 명시적인 변환 타입 결정이 허용되지 않는 경우, DCT2 및 DST7만 변환 타입 후보로서 이용될 수 있다. 이에 따라, 수평 방향 변환 타입 및 수직 방향 변환 타입 각각은 DCT2 또는 DST7으로 결정될 수 있다.
코딩 블록 또는 변환 블록을 복수의 서브 블록들로 분할하고, 복수의 서브 블록들 각각에 대해 변환을 수행할 수 있다. 일 예로, 코딩 블록에 상술한 서브 파티션 인트라 예측 부호화 방법이 적용되는 경우, 코딩 블록을 복수의 서브 블록들로 분할하고, 복수의 서브 블록들 각각에 대해 변환을 수행할 수 있다.
서브 블록들 각각의 변환 타입은 서로 동일할 수 있다. 일 예로, 복수의 서브 블록들 중 제1 서브 블록에 대한 변환 타입이 결정되면, 나머지 서브 블록들에도 상기 제1 서브 블록의 변환 타입을 나머지 서브 블록들에 적용할 수 있다. 또는, 코딩 블록을 위한 변환 타입을 결정하고, 코딩 블록의 변환 타입을 서브 블록들의 변환 타입으로 결정할 수 있다.
다른 예로, 복수의 서브 블록들의 변환 타입을 개별적으로 결정할 수 있다. 각 서브 블록의 변환 타입은 각 서브 블록에 대해 시그날링되는 정보에 기초하여 결정될 수 있다. 일 예로, 각 서브 블록에 대해 인덱스 정보 tu_mts_idx가 시그날링될 수 있다. 인덱스 정보 tu_mts_idx는 복수의 수평 방향에 대한 변환 타입 및 수직 방향에 대한 변환 타입의 조합들 중 어느 하나를 특정할 수 있다. tu_mts_idx의 값에 따라, 수평 방향의 변환 타입 및 수직 방향의 변환 타입은 DCT2, DST7 또는 DCT8로 결정될 수 있다. 인덱스 정보 tu_mts_idx에 기초하여, 수평 방향의 변환 타입 및 수직 방향의 변환 타입이 동일한지 여부가 결정될 수 있다.
현재 서브 블록의 변환 타입 이전 서브 블록과 동일한 변환 타입을 사용하는지 여부를 나타내는 정보를 시그날링할 수 있다. 상기 정보가 이전 서브 블록과 동일한 변환 타입을 사용함을 나타내는 경우, 현재 서브 블록에 대한 인덱스 정보 tu_mts_idx의 부호화를 생략하고, 이전 서브 블록의 변환 타입을 현재 서브 블록에 적용할 수 있다. 반면, 상기 정보가 이전 서브 블록과 상이한 변환 타입을 사용함을 나타내는 경우, 현재 서브 블록에 대한 인덱스 정보 tu_mts_idx를 부호화할 수 있다. 이때, 현재 서브 블록의 인덱스 정보는 이전 서브 블록의 인덱스 정보가 지시하는 변환 타입 조합을 제외한 잔여 변환 타입 조합들 중 어느 하나를 가리킬 수 있다.
또는, 코딩 블록이 복수의 서브 블록으로 분할된 경우에는 명시적인 변환 타입 결정이 허용되지 않도록 설정할 수 있다. 명시적인 변환 타입이 허용되는 경우에는, 인덱스 정보 tu_mts_idx에 기초하여 변환 타입이 결정될 수 있다. 반면, 명시적인 변환 타입 결정이 허용되지 않는 경우, 서브 블록의 크기, 형태 또는 논 제로 계수를 포함하는 서브 블록의 위치 중 적어도 하나를 고려하여 변환 타입이 결정될 수 있다.
도 26은 서브 블록의 변환 타입을 결정하는 예를 나타낸 도면이다.
도 26에서는, 서브 블록의 높이 및 너비비가 1:2 또는 2:1인 예가 도시되었다.
수평 방향 변환 타입 및 수직 방향 변환 타입은 각각 서브 블록의 너비 및 높이를 기초로 결정될 수 있다. 일 예로, 도 26의 (a) 및 (b)에 도시된 예에서와 같이, 서브 블록의 너비가 문턱값보다 작은 경우에는 수평 방향 변환 타입으로 제1 변환 타입(예컨대, DCT2)을 사용할 수 있다. 반면, 서브 블록의 너비가 문턱값 이상인 경우에는 수평 방향 변환 타입으로 제2 변환 타입(예컨대, DST7)을 사용할 수 있다.
또한, 서브 블록의 높이가 문턱값보다 작은 경우에는 수직 방향 변환 타입으로 제1 변환 타입(예컨대, DCT2)를 사용할 수 있다. 반면, 서브 블록의 너비가 문턱값 이상인 경우에는 수직 방향 변환 타입으로 제2 변환 타입(예컨대, DST7)을 사용할 수 있다.
여기서, 문턱값은 2, 4 또는 8과 같은 자연수 일 수 있다. 문턱값은 코딩 블록의 크기, 형태, 인트라 예측 모드 또는 예측 부호화 모드 중 적어도 하나를 기초로 가변적으로 결정될 수 있다. 또는, 문턱값을 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다.
상술한 예에서는, 서브 블록의 너비 및 높이를 하나의 문턱값과 비교하는 것을 예로 들었으나, 서브 블록의 너비 및 높이를 두개의 문턱값과 비교하여 변환 타입을 결정할 수도 있다. 일 예로, 서브 블록의 너비가 제1 문턱값보다 작거나, 제2 문턱값보다 큰 경우에는 수평 방향의 변환 타입을 DCT2로 결정할 수 있다. 그렇지 않은 경우, 수평 방향의 변환 타입을 DST7로 결정할 수 있다. 또한, 서브 블록의 높이가 제1 문턱값보다 작거나, 제2 문턱값보다 큰 경우에는 수직 방향의 변환 타입을 DCT2로 결정할 수 있다. 그렇지 않은 경우, 수직 방향의 변환 타입을 DST7로 결정할 수 있다. 제2 문턱값은 제1 문턱값보다 큰 자연수로, 제1 문턱값은 2, 4 또는 8과 같은 자연수이고, 제2 문턱값은 8, 16 또는 32와 같은 자연수일 수 있다.
다른 예로, 서브 블록이 높이와 너비가 동일한 정방형인 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 동일하게 설정하는 한편, 서브 블록이 높이와 너비가 상이한 비정방형인 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 상이하게 설정할 수 있다. 일 예로, 서브 블록의 너비가 높이보다 큰 경우에는, 수평 방향의 변환 타입을 DST7로 결정하고, 수직 방향의 변환 타입을 DCT2로 결정할 수 있다. 서브 블록의 높이가 너비보다 큰 경우에는, 수직 방향의 변환 타입을 DST7으로 결정하고, 수평 방향의 변환 타입을 DCT2로 결정할 수 있다.
복수의 서브 블록들 중 적어도 하나에 포함된 잔차 계수들의 값을 0으로 설정할 수 있다. 여기서, 잔차 계수는 변환을 거쳐 생성된 변환 계수, 변환 스킵을 거쳐 생성된 변환 스킵 계수 또는 상기 변환 계수 또는 계수를 양자화하여 생성된 양자화된 계수를 의미한다. 일 예로, 코딩 블록의 경계로부터 소정 거리 이상 이격된 서브 블록에 포함된 잔차 계수들의 값을 0으로 설정할 수 있다.
도 27은 서브 블록들의 잔차 계수가 0로 설정되는 예를 설명하기 위한 도면이다.
도 27에 도시된 예에서, CBF(Coded Block Flag)는 서브 블록내 0이 아닌 잔차 계수가 존재하는지 여부를 나타낸다. CBF의 값이 0인 것은 서브 블록 내 0이 아닌 잔차 계수가 존재하지 않음을 나타내고, CBF의 값이 1인 것은 서브 블록 내 0이 아닌 잔차 계수가 존재함을 나타낸다.
코딩 블록의 경계로부터 서브 블록까지의 거리가 문턱값 이상인 경우, 서브 블록에 포함된 잔차 계수들은 0으로 설정될 수 있다. 이때, 코딩 블록의 경계로부터 서브 블록까지의 거리는 코딩 블록 경계에 위치하는 제1 샘플과, 서브 블록에 포함된 제2 샘플를 기초로 획득될 수 있다. 일 예로, 제1 샘플은 코딩 블록의 좌측 상단 코너에 위치하는 샘플, 좌측 하단 코너에 위치하는 샘플, 좌중단에 위치하는 샘플, 우측 상단 코너에 위치하는 샘플, 우측 하단 코너에 위치하는 샘플, 우중단에 위치하는 샘플, 상측 중단에 위치하는 샘플 또는 하측 중단에 위치하는 샘플일 수 있다. 제2 샘플은 서브 블록의 좌측 상단 코너에 위치하는 샘플, 좌측 하단 코너에 위치하는 샘플, 좌중단에 위치하는 샘플, 우측 상단 코너에 위치하는 샘플, 우측 하단 코너에 위치하는 샘플, 우중단에 위치하는 샘플, 상측 중단에 위치하는 샘플 또는 하측 중단에 위치하는 샘플일 수 있다.
문턱값은 코딩 블록의 크기, 형태, 코딩 블록에 포함된 서브 블록들의 개수 또는 서브 블록의 크기 중 적어도 하나를 기초로 결정될 수 있다. 또는, 문턱값을 결정하기 위한 정보가 비트스트림을 통해 시그날링될 수 있다.
일 예로, 현재 블록에 수직 방향 파티셔닝이 적용된 경우, 코딩 블록의 좌측 경계로부터의 거리가 문턱값 이상인 서브 블록의 잔차 계수들이 0으로 설정될 수 있다. 코딩 블록의 크기가 64이고, 문턱값이 32인 경우, 도 27의 (a)에 도시된 예에서와 같이, 코딩 블록의 좌측 경계로부터의 거리가 32 이상인 서브 블록들(Sub-CU2 및 Sub-CU3)의 잔차 계수들이 0으로 설정될 수 있다.
또는, 현재 블록에 수평 방향 파티셔닝이 적용된 경우, 코딩 블록의 상단 경계로부터의 거리가 문턱값 이상인 서브 블록의 잔차 계수들이 0으로 설정될 수 있다. 코딩 블록의 크기가 64이고, 문턱값이 32인 경우, 도 27의 (b)에 도시된 예에서와 같이, 코딩 블록의 상단 경계로부터의 거리가 32 이상인 서브 블록들(Sub-CU2 및 Sub-CU3)의 잔차 계수들이 0으로 설정될 수 있다.
도시된 예와 반대로, 코딩 블록의 경계로부터의 거리가 문턱값보다 작은 서브 블록들에 포함된 잔차 계수들을 0으로 설정하는 것 역시 가능하다.
또는, 복수의 서브 블록들 중 기 설정된 위치에 위치하는 서브 블록을 제외한 잔여 서브 블록들의 잔차 계수를 0으로 설정할 수도 있다. 일 예로, 코딩 블록에 수직 방향 파티셔닝이 적용된 경우, 복수의 서브 블록들 중 최좌측 또는 최우측에 위치하는 서브 블록을 제외한 잔여 서브 블록들의 잔차 계수를 0으로 설정할 수 있다. 또는, 코딩 블록에 수평 방향 파티셔닝이 적용된 경우, 복수의 서브 블록들 중 최상단 또는 최하단에 위치하는 서브 블록을 제외한 잔여 서브 블록들의 잔차 계수를 0으로 설정할 수 있다.
서브 블록들에 대해서는 논제로 계수가 존재하는지 여부를 나타내는 정보, 예컨대, CBF의 부호화를 생략할 수 있다. CBF의 부호화가 생략된 경우, 코딩 블록의 경계와 서브 블록 사이의 거리 또는 서브 블록의 위치에 고려하여, 각 서브 블록에 0이 아닌 잔차 계수가 포함되어 있는지 여부가 결정될 수 있다. 일 예로, 도 27에 도시된 예에서, 서브 블록 0 및 서브 블록 1 (sub-CU0, sub-CU1)의 CBF 값은 1로 유도되고, 서브 블록 2 및 서브 블록 3 (sub-CU2, sub-CU3)의 CBF 값은 0으로 유도될 수 있다.
논제로 계수를 포함하는 서브 블록에 대해서는 변환 및/또는 양자화가 수행되는 한편, 논 제로 계수를 포함하지 않는 서브 블록에 대해서는 변환 및 양자화가 생략될 수 있다.
다른 예로, 코딩 블록 또는 변환 블록의 일부 영역에 대해서만 변환이 수행됨을 나타내는 정보가 부호화되어 시그날링될 수 있다. 상기 정보는 1비트의 플래그 cu_sbt_flag일 수 있다. 상기 플래그가 1인 것은, 코딩 블록 또는 변환 블록을 분할함으로써 생성된 복수의 서브 블록들 중 일부에 대해서만 변환이 수행됨을 나타내고, 상기 플래그가 0인 것은, 코딩 블록 또는 변환 블록을 서브 블록들로 분할함이 없이 변환이 수행됨을 나타낸다.
코딩 블록의 일부 영역에 대해서만 변환을 수행하는 기법은, 코딩 블록에 서브 파티션 인트라 부호화 방법이 적용된 경우에 한하여 허용될 수 있다. 이에 따라, 코딩 블록에 서브 파티션 인트라 부호화 방법이 적용된 경우에 한하여, cu_sbt_flag가 부호화되어 시그날링될 수 있다. cu_sbt_flag의 값이 1인 경우, 코딩 블록 또는 변환 블록을 분할함으로써 생성된 복수의 서브 블록들 중 일부 서브 블록에 대해서만 변환이 수행되고, 나머지 서브 블록들의 잔차 계수들은 0으로 설정될 수 있다. cu_sbt_flag의 값이 1인 경우, 모든 서브 블록들에 대해 변환이 수행될 수 있다.
또는, 코딩 블록에 서브 파티션 인트라 부호화 방법이 적용된 경우, cu_sbt_flag의 부호화를 생략하고, cu_sbt_flag의 값을 1로 설정할 수 있다.
다른 예로, 코딩 블록의 예측 부호화 모드가 화면 간 예측 또는 현재 픽처 참조인 경우에 한하여, 코딩 블록의 일부 영역에 대해서만 변환을 수행하는 기법을 허용할 수 있다. 코딩 블록이 화면 간 예측 또는 현재 픽처 참조로 부호화된 경우, 코딩 블록의 일부 영역에 대해서만 변환이 수행되는지 여부를 나타내는 정보가 부호화되어 시그날링될 수 있다. 코딩 블록의 일부 영역에 대해서만 변환이 수행되는 경우, 코딩 블록의 분할 형태를 나타내는 정보를 부호화하여 시그날링할 수 있다. 코딩 블록의 분할 형태를 나타내는 정보는, 코딩 블록이 4개의 서브 블록들로 분할되는지 여부를 나타내는 정보, 코딩 블록의 분할 방향을 나타내는 정보 또는 서브 블록들의 개수를 나타내는 정보 중 적어도 하나를 포함할 수 있다. 일 예로, cu_sbt_flag가 1인 경우, 코딩 블록이 4개의 서브 블록들로 분할되는지 여부를 나타내는 플래그 cu_sbt_quadtree_flag가 시그날링될 수 있다. cu_sbt_quadtree_flag가 1인 것은, 코딩 블록이 4개의 서브 블록들로 분할됨을 나타낸다. 일 예로, 3개의 수직선 또는 3개의 수평선을 이용하여, 코딩 블록을 4개의 서브 블록들로 분할하거나, 1개의 수직선 및 1개의 수평선을 이용하여 코딩 블록을 4개의 서브 블록들로 분할할 수 있다. cu_sbt_quadtree_flag가 0인 것은, 코딩 블록이 2개의 서브 블록들로 분할됨을 나타낸다. 일 예로, 1개의 수직선 또는 1개의 수평선을 이용하여, 코딩 블록을 2개의 서브 블록들로 분할할 수 있다.
또한, 코딩 블록의 분할 방향을 나타내는 플래그가 비트스트림을 통해 시그날링될 수 있다. 일 예로, 코딩 블록에 수평 방향 파티셔닝이 적용되는지 여부를 나타내는 플래그 cu_sbt_horizontal_flag가 부호화되어 시그날링될 수 있다. cu_sbt_horizontal_flag의 값이 1인 것은, 코딩 블록에 수평 방향 파티셔닝이 적용됨을 나타내고, cu_sbt_horizontal_flag의 값이 0인 것은, 코딩 블록에 수직 방향 파티셔닝이 적용됨을 나타낸다.
논제로 계수가 존재하지 않는 서브 블록 또는 변환이 수행되지 않는 서브 블록의 위치를 나타내는 정보가 비트스트림을 통해 시그날링될 수 있다. 상기 정보에 기초하여, 변환 및/또는 양자화가 수행된 서브 블록 및 변환 및/또는 양자화의 수행이 생략된 서브 블록이 결정될 수 있다.
도 28은 비트스트림을 통해 시그날링되는 정보에 기초하여, 변환 및/또는 양자화가 수행된 서브 블록의 위치가 특정되는 예를 나타낸 것이다.
특정 위치 또는 첫번째 서브 블록에 논제로 계수가 존재하는지 여부를 나타내는 플래그 sbt_upleft_flag가 시그날링될 수 있다. sbt_upleft_flag의 값이 1인 것은, 코딩 블록의 상단 또는 좌측에 위치하는 서브 블록에 변환 및/또는 양자화가 수행되었음을 나타내고, 코딩 블록의 우측 또는 하단에 위치하는 서브 블록에 변환 및/또는 양자화가 수행되지 않았음을 나타낸다. sbt_upleft_flag의 값이 0인 것은, 코딩 블록의 상단 또는 좌측에 위치하는 서브 블록에 변환 및/또는 양자화가 수행되었음을 나타내고, 코딩 블록의 우측 또는 하단에 위치하는 서브 블록에 변환 및/또는 양자화가 수행되지 않았음을 나타낸다.
코딩 블록이 4개의 서브 블록들로 분할된 경우, sbt_upleft_flag는 N개의 서브 블록들에 대해 변환 및/또는 양자화가 수행되었음을 나타낼 수 있다. 일 예로, sbt_upleft_flag의 값이 1인 것은 상단 또는 좌측 2개의 서브 블록들에 대해 변환 및/양자화가 수행되었음을 나타내고, sbt_upleft_flag의 값이 0인 것은 우측 또는 하단 2개의 서브 블록들에 대해 변환 및/또는 양자화가 수행되었음을 나타낸다.
도시된 예와 달리, N의 값을 1 또는 3으로 설정할 수도 있다.
변환 및/또는 양자화가 수행되지 않은 서브 블록의 잔차 계수들은 0으로 설정될 수 있다.
코딩 블록의 분할 방향 및 서브 블록의 위치를 고려하여, 서브 블록의 변환 타입을 결정할 수 있다. 일 예로, 코딩 블록이 수직 방향으로 분할되고, 서브 블록들 중 좌측에 위치하는 서브 블록에 대해 변환이 수행되는 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 상이하게 설정할 수 있다. 일 예로, 수평 방향 변환 타입은 DCT8로 설정되고, 수직 방향 변환 타입은 DST7으로 설정될 수 있다. 반면, 코딩 블록이 수직 방향으로 분할되고, 서브 블록들 중 우측에 위치하는 서브 블록에 대해 변환이 수행되는 경우, 서브 블록의 수평 방향 변환 타입 및 수직 방향 변환 타입이 동일하게 설정될 수 있다. 일 예로, 수평 방향 변환 타입 및 수직 방향 변환 타입은 DST7으로 설정할 수 있다.
또는, 코딩 블록이 수평 방향으로 분할되고, 서브 블록들 중 상단에 위치하는 서브 블록에 대해 변환이 수행되는 경우, 수평 방향 변환 타입 및 수직 방향 변환 타입을 상이하게 설정할 수 있다. 일 예로, 수평 방향 변환 타입은 DST7으로 설정되고, 수직 방향 변환 타입은 DCT8로 설정될 수 있다. 반면, 코딩 블록이 수평 방향으로 분할되고, 서브 블록들 중 하단에 위치하는 서브 블록에 대해 변환이 수행되는 경우, 서브 블록의 수평 방향 변환 타입 및 수직 방향 변환 타입이 동일하게 설정될 수 있다. 일 예로, 수평 방향 변환 타입 및 수직 방향 변환 타입은 DST7으로 설정할 수 있다.
서브 블록들에 대해서는 논제로 계수가 존재하는지 여부를 나타내는 정보, 예컨대, CBF의 부호화를 생략할 수 있다. CBF의 부호화가 생략된 경우, 변환이 수행되는 블록의 위치를 고려하여, 각 서브 블록에 0이 아닌 잔차 계수가 포함되어 있는지 여부가 결정될 수 있다. 일 예로, sbt_upleft_flag의 값이 0인 경우, 좌측 또는 상단에 위치하는 서브 블록들의 CBF값은 0으로 유도되고, 우측 또는 하단에 위치하는 서브 블록들의 CBF값은 1로 유도될 수 있다. 또는, sbt_upleft_flag의 값이 1인 경우, 좌측 또는 상단에 위치하는 서브 블록들의 CBF값은 1로 유도되고, 우측 또는 하단에 위치하는 서브 블록들의 CBF값은 0으로 유도될 수 있다.
변환이 수행되는 서브 블록의 복원 샘플은 예측 샘플과 잔차 샘플의 합으로 유도될 수 있다. 반면, 변환이 생략되는 서브 블록에서는 예측 샘플이 복원 샘플로 설정될 수 있다. 양자화는 블록의 에너지를 줄이기 위한 것으로, 양자화 과정은 변환 계수를 특정 상수값으로 나누는 과정을 포함한다. 상기 상수값은 양자화 파라미터에 의해 유도될 수 있고, 양자화 파라미터는 1부터 63사이의 값으로 정의될 수 있다.
부호화기에서 변환 및 양자화를 수행하면, 복호화기는 역양자화 및 역변환을 통해 잔차 블록을 획득할 수 있다. 복호화기에서는 예측 블록과 잔차 블록을 더하여, 현재 블록에 대한 복원 블록을 획득할 수 있다.
현재 블록의 복원 블록이 획득되면, 인루프 필터링(In-loop filtering)을 통해 양자화 및 부호화 과정에서 발생하는 정보의 손실을 줄일 수 있다. 인루프 필터는 디블록킹 필터(Deblocking filter), 샘플 적응적 오프셋 필터(Sample Adaptive Offset filter, SAO) 또는 적응적 루프 필터(Adaptive Loop Filter, ALF) 중 적어도 하나를 포함할 수 있다. 이하, 인루프 필터가 적용되기 전의 복원 블록을 제1 복원 블록이라 호칭하고, 인루프 필터가 적용된 이후의 복원 블록을 제2 복원 블록이라 호칭하기로 한다.
제1 복원 블록에 디블록킹 필터, SAO 또는 ALF 중 적어도 하나를 적용하여 제2 복원 블록을 획득할 수 있다. 이때, SAO 또는 ALF는 디블록킹 필터가 적용된 이후에 적용될 수 있다.
디블록킹 필터는 블록 단위로 양자화를 수행함에 따라 발생하는 블록의 경계에서의 화질 열화(Blocking Artifact)를 완화시키기 위한 것이다. 디블록킹 필터를 적용하기 위해, 제1 복원 블록과 이웃 복원 블록 사이의 블록 강도(Blocking Strength, BS)를 결정할 수 있다.
도 29는 블록 강도를 결정하는 과정을 나타낸 흐름도이다.
도 29에 도시된 예에서, P는 제1 복원 블록을 나타내고, Q는 이웃 복원 블록을 나타낸다. 여기서, 이웃 복원 블록은 현재 블록의 좌측 또는 상단에 이웃하는 것일 수 있다.
도 29에 도시된 예에서는, P 및 Q의 예측 부호화 모드, 0이 아닌 변환 계수가 포함되어 있는지 여부, 동일한 참조 픽처를 이용하여 인터 예측되었는지 여부 또는 움직임 벡터들의 차분값이 문턱값 이상인지 여부를 고려하여 블록 강도가 결정되는 것으로 도시되었다.
블록 강도에 기초하여, 디블록킹 필터의 적용 여부가 결정될 수 있다. 일 예로, 블록 강도가 0인 경우에는 필터링이 수행되지 않을 수 있다.
SAO는 주파수 영역에서 양자화를 수행함에 따라 발생하는 링잉 현상(Ringing Artifact)를 완화시키기 위한 것이다. SAO는 제1 복원 영상의 패턴을 고려하여 결정되는 오프셋을 가산 또는 감산함으로써 수행될 수 있다. 오프셋의 결정 방법은 에지 오프셋(Edge Offset, EO) 또는 밴드 오프셋(Band Offset)을 포함한다. EO는 주변 화소들의 패턴에 따라, 현재 샘플의 오프셋을 결정하는 방법을 나타낸다. BO는 영역 내 비슷한 밝기 값을 갖는 화소들의 집합에 대해 공통의 오프셋을 적용하는 방법을 나타낸다. 구체적으로, 화소 밝기를 32개의 균등한 구간으로 나누고, 유사한 밝기 값을 갖는 화소들을 하나의 집합으로 설정할 수 있다. 일 예로, 32개의 밴드들 중 인접한 4개의 밴드를 하나의 그룹으로 설정하고, 4개 밴드에 속한 샘플들에는 동일한 오프셋 값을 적용할 수 있다.
ALF는 제1 복원 영상 또는 디블록킹 필터가 적용된 복원 영상에 기 정의된 크기/모양의 필터를 적용하여 제2 복원 영상을 생성하는 방법이다. 하기 수학식 32는 ALF의 적용 예를 나타낸다.

픽처, 코딩 트리 유닛, 코딩 블록, 예측 블록 또는 변환 블록 단위로, 기 정의된 필터 후보들 중 어느 하나를 선택할 수 있다. 각각의 필터 후보들은 크기 또는 모양 중 어느 하나가 상이할 수 있다.
도 30은 기 정의된 필터 후보들을 나타낸다.
도 30에 도시된 예에서와 같이, 5x5, 7x7 또는 9x9 크기의 다이아몬드 형태 중 적어도 하나를 선택할 수 있다.
크로마 성분에 대해서는 5x5 크기의 다이아몬드 형태만이 사용될 수 있다.
복호화 과정 또는 부호화 과정을 중심으로 설명된 실시예들을, 부호화 과정 또는 복호화 과정에 적용하는 것은, 본 발명의 범주에 포함되는 것이다. 소정의 순서로 설명된 실시예들을, 설명된 것과 상이한 순서로 변경하는 것 역시, 본 발명의 범주에 포함되는 것이다.
상술한 실시예는 일련의 단계 또는 순서도를 기초로 설명되고 있으나, 이는 발명의 시계열적 순서를 한정한 것은 아니며, 필요에 따라 동시에 수행되거나 다른 순서로 수행될 수 있다. 또한, 상술한 실시예에서 블록도를 구성하는 구성요소(예를 들어, 유닛, 모듈 등) 각각은 하드웨어 장치 또는 소프트웨어로 구현될 수도 있고, 복수의 구성요소가 결합하여 하나의 하드웨어 장치 또는 소프트웨어로 구현될 수도 있다. 상술한 실시예는 다양한 컴퓨터 구성요소를 통하여 수행될 수 있는 프로그램 명령어의 형태로 구현되어 컴퓨터 판독 가능한 기록 매체에 기록될 수 있다. 상기 컴퓨터 판독 가능한 기록 매체는 프로그램 명령어, 데이터 파일, 데이터 구조 등을 단독으로 또는 조합하여 포함할 수 있다. 컴퓨터 판독 가능한 기록 매체의 예에는, 하드 디스크, 플로피 디스크 및 자기 테이프와 같은 자기 매체, CD-ROM, DVD와 같은 광기록 매체, 플롭티컬 디스크(floptical disk)와 같은 자기-광 매체(magneto-optical media), 및 ROM, RAM, 플래시 메모리 등과 같은 프로그램 명령어를 저장하고 수행하도록 특별히 구성된 하드웨어 장치가 포함된다. 상기 하드웨어 장치는 본 발명에 따른 처리를 수행하기 위해 하나 이상의 소프트웨어 모듈로서 작동하도록 구성될 수 있으며, 그 역도 마찬가지이다.
Claims (14)
- 현재 블록의 참조 샘플 라인을 결정하는 단계;
상기 현재 블록의 인트라 예측 모드와 동일한 후보 인트라 예측 모드가 존재하는지 여부를 결정하는 단계;
상기 결정을 기초로, 상기 현재 블록의 인트라 예측 모드를 유도하는 단계; 및
상기 참조 샘플 라인 및 상기 인트라 예측 모드를 기초로, 상기 현재 블록에 대한 인트라 예측을 수행하는 단계를 포함하되,
상기 후보 인트라 예측 모드들 중 적어도 하나는, 상기 현재 블록의 상단 이웃 블록의 인트라 예측 모드 및 상기 현재 블록의 좌측 이웃 블록의 인트라 예측 모드 중 최대값에 오프셋을 가산 또는 감산하여 유도되는 것을 특징으로 하는 영상 복호화 방법. - 제1 항에 있어서,
상기 상단 이웃 블록의 인트라 예측 모드 및 상기 좌측 이웃 블록의 인트라 예측 모드의 차분이 64인 경우, 상기 후보 인트라 예측 모드들 중 적어도 하나는 상기 최대값에 2를 가산 또는 감산하여 유도되는 것을 특징으로 하는, 영상 복호화 방법. - 제1 항에 있어서,
상기 참조 샘플 라인의 인덱스에 따라, 상기 후보 인트라 예측 모드들의 개수가 상이한 것을 특징으로 하는, 영상 복호화 방법. - 제1 항에 있어서,
상기 현재 블록을 복수의 서브 블록들로 분할할 것인지 여부를 결정하는 단계를 더 포함하되,
상기 현재 블록이 복수의 서브 블록들로 분할되는 경우, 상기 복수의 서브 블록들은 하나의 인트라 예측 모드를 공유하는 것을 특징으로 하는, 영상 복호화 방법. - 제4 항에 있어서,
상기 복수의 서브 블록들 중 일부에 대해서는 역변환이 생략되는 것을 특징으로 하는, 영상 복호화 방법. - 제4 항에 있어서,
서브 블록의 수평 방향 변환 타입은 상기 서브 블록의 너비를 기초로 결정되고, 상기 서브 블록의 수직 방향 변환 타입은 상기 서브 블록의 높이를 기초로 결정되는 것을 특징으로 하는, 영상 복호화 방법. - 제4 항에 있어서,
서브 블록의 수평 방향 변환 타입 및 수직 방향 변환 타입은 상기 서브 블록의 형태를 기초로 결정되는 것을 특징으로 하는, 영상 복호화 방법. - 현재 블록의 참조 샘플 라인을 결정하는 단계;
상기 현재 블록의 인트라 예측 모드와 동일한 후보 인트라 예측 모드가 존재하는지 여부를 결정하는 단계;
상기 결정을 기초로, 상기 현재 블록의 인트라 예측 모드를 유도하는 단계; 및
상기 참조 샘플 라인 및 상기 인트라 예측 모드를 기초로, 상기 현재 블록에 대한 인트라 예측을 수행하는 단계를 포함하되,
상기 후보 인트라 예측 모드들 중 적어도 하나는, 상기 현재 블록의 상단 이웃 블록의 인트라 예측 모드 및 상기 현재 블록의 좌측 이웃 블록의 인트라 예측 모드 중 최대값에 오프셋을 가산 또는 감산하여 유도되는 것을 특징으로 하는 영상 부호화 방법. - 제8 항에 있어서,
상기 상단 이웃 블록의 인트라 예측 모드 및 상기 좌측 이웃 블록의 인트라 예측 모드의 차분이 64인 경우, 상기 후보 인트라 예측 모드들 중 적어도 하나는 상기 최대값에 2를 가산 또는 감산하여 유도되는 것을 특징으로 하는, 영상 부호화 방법. - 제8 항에 있어서,
상기 참조 샘플 라인의 인덱스에 따라, 상기 후보 인트라 예측 모드들의 개수가 상이한 것을 특징으로 하는, 영상 부호화 방법. - 제8 항에 있어서,
상기 현재 블록을 복수의 서브 블록들로 분할할 것인지 여부를 결정하는 단계를 더 포함하되,
상기 현재 블록이 복수의 서브 블록들로 분할되는 경우, 상기 복수의 서브 블록들은 하나의 인트라 예측 모드를 공유하는 것을 특징으로 하는, 영상 부호화 방법. - 제11 항에 있어서,
상기 복수의 서브 블록들 중 일부에 대해서는 변환이 생략되는 것을 특징으로 하는, 영상 부호화 방법. - 제11 항에 있어서,
서브 블록의 수평 방향 변환 타입은 상기 서브 블록의 너비를 기초로 결정되고, 상기 서브 블록의 수직 방향 변환 타입은 상기 서브 블록의 높이를 기초로 결정되는 것을 특징으로 하는, 영상 부호화 방법. - 제11 항에 있어서,
서브 블록의 수평 방향 변환 타입 및 수직 방향 변환 타입은 상기 서브 블록의 형태를 기초로 결정되는 것을 특징으로 하는, 영상 부호화 방법.
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020180121757 | 2018-10-12 | ||
| KR1020180121713 | 2018-10-12 | ||
| KR20180121757 | 2018-10-12 | ||
| KR20180121713 | 2018-10-12 | ||
| KR20190006611 | 2019-01-18 | ||
| KR1020190006611 | 2019-01-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200041810A true KR20200041810A (ko) | 2020-04-22 |
Family
ID=70164224
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020190126375A KR20200041810A (ko) | 2018-10-12 | 2019-10-11 | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 |
Country Status (15)
| Country | Link |
|---|---|
| US (5) | US11252403B2 (ko) |
| EP (2) | EP4336830A2 (ko) |
| JP (3) | JP7430716B2 (ko) |
| KR (1) | KR20200041810A (ko) |
| CN (5) | CN112930685A (ko) |
| AU (1) | AU2019358651A1 (ko) |
| BR (1) | BR112021006238A2 (ko) |
| CA (1) | CA3113861A1 (ko) |
| CL (1) | CL2021000796A1 (ko) |
| IL (2) | IL305173A (ko) |
| MX (1) | MX2021003981A (ko) |
| PH (1) | PH12021550624A1 (ko) |
| SG (1) | SG11202103208PA (ko) |
| WO (1) | WO2020076125A1 (ko) |
| ZA (1) | ZA202101991B (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022186616A1 (ko) * | 2021-03-04 | 2022-09-09 | 현대자동차주식회사 | 인트라 예측모드 유도를 이용하는 비디오 코딩방법 및 장치 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117880501A (zh) * | 2018-10-07 | 2024-04-12 | 三星电子株式会社 | 用于编码或解码视频信号的视频信号处理方法和设备 |
| IL305173A (en) * | 2018-10-12 | 2023-10-01 | Guangdong Oppo Mobile Telecommunications Corp Ltd | A method for encoding/decoding an image signal and a device for it |
| CN116456083A (zh) | 2018-12-25 | 2023-07-18 | Oppo广东移动通信有限公司 | 解码预测方法、装置及计算机存储介质 |
| JP2022518612A (ja) * | 2019-02-05 | 2022-03-15 | ベイジン、ターチア、インターネット、インフォメーション、テクノロジー、カンパニー、リミテッド | ビデオ復号化方法、ビデオ復号化装置、及び非一時的コンピュータ可読記憶媒体 |
| KR20210114386A (ko) | 2019-02-08 | 2021-09-23 | 주식회사 윌러스표준기술연구소 | 이차 변환을 이용하는 비디오 신호 처리 방법 및 장치 |
| US20220086490A1 (en) * | 2019-02-12 | 2022-03-17 | Lg Electronics Inc. | Method and apparatus for processing video signal |
| JP7293376B2 (ja) * | 2019-02-28 | 2023-06-19 | ヒューマックス・カンパニー・リミテッド | イントラ予測ベースのビデオ信号処理方法及び装置 |
| JP7145793B2 (ja) * | 2019-03-11 | 2022-10-03 | Kddi株式会社 | 画像復号装置、画像復号方法及びプログラム |
| EP4340367A3 (en) * | 2019-04-27 | 2024-04-24 | Huawei Technologies Co., Ltd. | An encoder, a decoder and corresponding methods of intra prediction |
| AU2019204437B2 (en) * | 2019-06-24 | 2022-02-03 | Canon Kabushiki Kaisha | Method, apparatus and system for encoding and decoding a block of video samples |
| US11310511B2 (en) * | 2019-10-09 | 2022-04-19 | Tencent America LLC | Method and apparatus for video coding |
| US11671592B2 (en) * | 2019-12-09 | 2023-06-06 | Qualcomm Incorporated | Position-dependent intra-prediction combination for angular intra-prediction modes for video coding |
| WO2022204525A1 (en) * | 2021-03-25 | 2022-09-29 | Trustees Of Boston University | Dark-field mid-infrared photothermal microscopy |
| US20230078392A1 (en) * | 2021-09-15 | 2023-03-16 | Tencent America LLC | Geometric partition based intra prediction |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101458471B1 (ko) * | 2008-10-01 | 2014-11-10 | 에스케이텔레콤 주식회사 | 영상 부호화/복호화 방법 및 장치 |
| CN102970526B (zh) * | 2011-08-31 | 2016-12-14 | 华为技术有限公司 | 一种获得变换块尺寸的方法和模块 |
| EP2797324A4 (en) * | 2011-10-24 | 2015-11-11 | Infobridge Pte Ltd | DEVICE FOR IMAGE DECODING |
| US9154796B2 (en) * | 2011-11-04 | 2015-10-06 | Qualcomm Incorporated | Intra-mode video coding |
| US10841593B2 (en) * | 2015-06-18 | 2020-11-17 | Qualcomm Incorporated | Intra prediction and intra mode coding |
| KR20170058837A (ko) | 2015-11-19 | 2017-05-29 | 한국전자통신연구원 | 화면내 예측모드 부호화/복호화 방법 및 장치 |
| CN113438478A (zh) * | 2016-04-06 | 2021-09-24 | 株式会社Kt | 对视频进行编码、解码的方法及存储压缩视频数据的设备 |
| KR102393150B1 (ko) * | 2016-05-13 | 2022-05-02 | 소니그룹주식회사 | 화상 처리 장치 및 방법 |
| CN114222137A (zh) * | 2016-05-28 | 2022-03-22 | 世宗大学校产学协力团 | 构成预测运动矢量列表的方法 |
| EP3890326B1 (en) * | 2016-06-24 | 2023-09-06 | KT Corporation | Intra prediction using reference pixels from additional lines |
| CN116708777A (zh) * | 2016-07-18 | 2023-09-05 | 韩国电子通信研究院 | 图像编码/解码方法和装置以及存储比特流的记录介质 |
| WO2018026166A1 (ko) * | 2016-08-01 | 2018-02-08 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| US11438582B2 (en) | 2016-08-03 | 2022-09-06 | Kt Corporation | Video signal processing method and device for performing intra-prediction for an encoding/decoding target block |
| WO2018047995A1 (ko) * | 2016-09-08 | 2018-03-15 | 엘지전자(주) | 인트라 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| WO2018052224A1 (ko) * | 2016-09-13 | 2018-03-22 | 한국전자통신연구원 | 영상 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| CN116634180A (zh) * | 2016-10-04 | 2023-08-22 | 株式会社Kt | 对视频进行编码和解码的方法、视频数据的发送方法 |
| US11297348B2 (en) * | 2018-04-13 | 2022-04-05 | Mediatek Inc. | Implicit transform settings for coding a block of pixels |
| US11128872B2 (en) * | 2018-07-16 | 2021-09-21 | Qualcomm Incorporated | Position dependent intra prediction combination with wide angle intra prediction |
| WO2020043145A1 (en) * | 2018-08-29 | 2020-03-05 | Huawei Technologies Co., Ltd. | Apparatus and method and for boundary partition |
| WO2020060242A1 (ko) * | 2018-09-19 | 2020-03-26 | 한국전자통신연구원 | 화면 내 예측 모드 부호화/복호화 방법, 장치 및 비트스트림을 저장한 기록 매체 |
| IL305173A (en) * | 2018-10-12 | 2023-10-01 | Guangdong Oppo Mobile Telecommunications Corp Ltd | A method for encoding/decoding an image signal and a device for it |
-
2019
- 2019-10-11 IL IL305173A patent/IL305173A/en unknown
- 2019-10-11 KR KR1020190126375A patent/KR20200041810A/ko active Search and Examination
- 2019-10-11 EP EP24153148.2A patent/EP4336830A2/en active Pending
- 2019-10-11 EP EP19870627.7A patent/EP3840387B1/en active Active
- 2019-10-11 JP JP2021519620A patent/JP7430716B2/ja active Active
- 2019-10-11 BR BR112021006238A patent/BR112021006238A2/pt unknown
- 2019-10-11 CN CN201980056255.0A patent/CN112930685A/zh active Pending
- 2019-10-11 CN CN202110387937.9A patent/CN113225559B/zh active Active
- 2019-10-11 IL IL281823A patent/IL281823B2/en unknown
- 2019-10-11 CA CA3113861A patent/CA3113861A1/en active Pending
- 2019-10-11 SG SG11202103208PA patent/SG11202103208PA/en unknown
- 2019-10-11 CN CN202310275594.6A patent/CN116347072A/zh active Pending
- 2019-10-11 CN CN202310276549.2A patent/CN116320407A/zh active Pending
- 2019-10-11 CN CN202310276059.2A patent/CN116320406A/zh active Pending
- 2019-10-11 WO PCT/KR2019/013384 patent/WO2020076125A1/ko active Application Filing
- 2019-10-11 AU AU2019358651A patent/AU2019358651A1/en active Pending
- 2019-10-11 MX MX2021003981A patent/MX2021003981A/es unknown
-
2021
- 2021-03-18 PH PH12021550624A patent/PH12021550624A1/en unknown
- 2021-03-24 ZA ZA2021/01991A patent/ZA202101991B/en unknown
- 2021-03-29 CL CL2021000796A patent/CL2021000796A1/es unknown
- 2021-04-01 US US17/220,793 patent/US11252403B2/en active Active
- 2021-12-07 US US17/457,949 patent/US20220094912A1/en active Granted
-
2023
- 2023-09-13 US US18/466,790 patent/US20240007616A1/en active Pending
- 2023-09-14 US US18/467,652 patent/US20240007617A1/en active Pending
- 2023-09-15 US US18/467,954 patent/US20240007618A1/en active Pending
-
2024
- 2024-01-24 JP JP2024008514A patent/JP2024042015A/ja active Pending
- 2024-01-25 JP JP2024009480A patent/JP2024042028A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022186616A1 (ko) * | 2021-03-04 | 2022-09-09 | 현대자동차주식회사 | 인트라 예측모드 유도를 이용하는 비디오 코딩방법 및 장치 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7430716B2 (ja) | ビデオ信号の符号化方法および復号化方法並びにその装置 | |
| KR20200063092A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200093468A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200054105A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200041801A (ko) | 영상 부호화/복호화 방법 및 장치 | |
| KR20200034645A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200034644A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20210030889A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200084306A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200078391A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20210022510A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20200132766A (ko) | 영상 신호 부호화/복호화 방법 및 이를 위한 장치 | |
| KR20210123950A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20220134476A (ko) | 영상 신호 부호화/복호화 방법 및 이를 기초로 생성된 비트스트림을 저장하는 기록 매체 | |
| KR20210103731A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210103763A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210075552A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210078768A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210112660A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20230063314A (ko) | 영상 신호 부호화/복호화 방법 및 이를 기초로 생성된 비트스트림을 저장하는 기록 매체 | |
| KR20210078773A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210118541A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210121528A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210116093A (ko) | 비디오 신호 처리 방법 및 장치 | |
| KR20210115898A (ko) | 비디오 신호 처리 방법 및 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination |