KR20200035054A - 중심 신호 프로세서를 가지는 유도형 센서 모듈 조립체 - Google Patents
중심 신호 프로세서를 가지는 유도형 센서 모듈 조립체 Download PDFInfo
- Publication number
- KR20200035054A KR20200035054A KR1020207004428A KR20207004428A KR20200035054A KR 20200035054 A KR20200035054 A KR 20200035054A KR 1020207004428 A KR1020207004428 A KR 1020207004428A KR 20207004428 A KR20207004428 A KR 20207004428A KR 20200035054 A KR20200035054 A KR 20200035054A
- Authority
- KR
- South Korea
- Prior art keywords
- cavity
- inductive sensor
- shaft
- inner diameter
- sensor module
- Prior art date
Links
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2053—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by a movable non-ferromagnetic conductive element
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
- G01R27/26—Measuring inductance or capacitance; Measuring quality factor, e.g. by using the resonance method; Measuring loss factor; Measuring dielectric constants ; Measuring impedance or related variables
- G01R27/2611—Measuring inductance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/0047—Housings or packaging of magnetic sensors ; Holders
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01F—MAGNETS; INDUCTANCES; TRANSFORMERS; SELECTION OF MATERIALS FOR THEIR MAGNETIC PROPERTIES
- H01F27/00—Details of transformers or inductances, in general
- H01F27/28—Coils; Windings; Conductive connections
- H01F27/2804—Printed windings
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K1/00—Printed circuits
- H05K1/16—Printed circuits incorporating printed electric components, e.g. printed resistor, capacitor, inductor
- H05K1/165—Printed circuits incorporating printed electric components, e.g. printed resistor, capacitor, inductor incorporating printed inductors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D2205/00—Indexing scheme relating to details of means for transferring or converting the output of a sensing member
- G01D2205/70—Position sensors comprising a moving target with particular shapes, e.g. of soft magnetic targets
- G01D2205/77—Specific profiles
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05K—PRINTED CIRCUITS; CASINGS OR CONSTRUCTIONAL DETAILS OF ELECTRIC APPARATUS; MANUFACTURE OF ASSEMBLAGES OF ELECTRICAL COMPONENTS
- H05K2201/00—Indexing scheme relating to printed circuits covered by H05K1/00
- H05K2201/09—Shape and layout
- H05K2201/09009—Substrate related
- H05K2201/09027—Non-rectangular flat PCB, e.g. circular
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Arrangements For Transmission Of Measured Signals (AREA)
Abstract
본 발명의 실시예는 송신 및 수신 코일에 의해 둘러싸인 중심 영역에 위치된 신호 프로세서를 갖는 인쇄 회로 기판 상에 형성된, 송신 및 수신 코일을 갖는 센서 모듈을 포함하는 신규한 유도형 회전 위치 센서에 관한 것이다. 이러한 배치는 보다 소형화된 센서 모듈을 허용한다. 전체 센서 모듈은 위치가 감지되는 회전 요소의 직경과 일반적으로 동일한 직경을 갖는 캐비티의 내부에 위치될 수 있다. 이러한 배치는 또한 타겟의 단부 상에 커플러가 형성될 수 있게 한다. 센서는 트랜시퍼 케이스 샤프트 및 트랜스퍼 케이스의 환형 보어와 동심이다. 센서는 비접촉식이며 움직일 수 있는 부분은 없다.
Description
본 출원은 2017년 8월 21일 자로 출원된 미국 가출원 62/548,053호의 우선권을 주장하며, 이는 그 전체로서 원용에 의해 본원에 포함된다.
본 발명은 일반적으로 위치 센서에 관한 것이다. 보다 구체적으로, 본 발명은 유도형 위치 센서에 관한 것이다.
인쇄 회로 기판(printed circuit board, PCB) 상에 인쇄된 송신기 및 수신 코일을 갖는 유도형 회전 센서를 제공하는 것은 공지되어 있다. 커플러(coupler)는 일반적으로 회전 부재 상의 타겟에 장착된다. 커플러는 코일로부터 이격되어 있다. 커플러는 수신 코일에서 코일에 대한 커플러의 회전 위치에 비례하는 와전류(eddy currents)가 생성되도록 한다. 프로세서는 와전류에 비례하는 전압을 결정한 다음, 출력 신호로 생성한다. 프로세서는 전형적으로 코일의 외주로부터 반경 방향 바깥쪽으로 PCB에 장착되는 ASIC에 제공된다. 그러나, 이러한 배치는 일부 포장 요구 사항에 대해서는 사용되기 어렵다.
본 발명의 일 실시예에서, 센서 모듈, 신호 프로세서 및 하우징을 포함하는 유도형 센서가 제공된다. 하우징은 제1 표면 및 제1 표면에 대향하는 제2 표면을 가진다. 원형 캐비티가 제1 표면에 배치된다. 원형 캐비티는 제1 내경(inner diameter)을 갖는다. 센서 모듈은 송신기 코일 및 수신 코일을 포함한다. 송신기 코일은 제2 내경 및 제1 외경을 갖는다. 수신 코일 및 신호 프로세서는 송신기 코일의 제2 내경 내에 배치된다. 송신기 코일의 제1 외경은 원형 캐비티의 제1 내경 내에 있다. 센서 모듈은 원형 캐비티의 제1 내경 내에서 원형 캐비티의 중심 축에 대하여 동심(concentric)으로 위치한다.
본 발명의 다른 실시예에서, 유도형 센서 조립체는 센서 모듈, 신호 프로세서, 샤프트(shaft) 및 하우징을 포함한다. 샤프트는 제1 외경, 제1 단부 및 제1 단부에 대향하는 제2 단부를 가진다. 돌출부는 샤프트의 제1 단부로부터 제1 외경 내에서 연장된다. 하우징은 제1 표면 및 제1 표면에 대향하는 제2 표면을 갖는다. 원형 캐비티는 제1 표면에 배치된다. 원형 캐비티는 제1 내경을 갖는다. 원형 벽은 원형 캐비티 주위에 원주를 형성하도록 제1 표면으로부터 길이 방향으로 연장된다. 원형 캐비티는 제1 내경을 갖는다. 센서 모듈은 송신기 코일과 수신 코일을 갖는다. 송신기 코일은 제2 내경과 제2 외경을 갖는다. 수신 코일 및 신호 프로세서는 송신기 코일의 제2 내경 내에 배치된다. 샤프트의 제1 외경과 송신기 코일의 제2 외경은 원형 캐비티의 제1 내경 내에 있다. 샤프트 및 센서 모듈은 원형 캐비티의 제1 내경 내에서 원형 캐비티의 중심 축에 대하여 동심으로 위치한다.
본 발명의 또 다른 실시예에서, 유도형 센서 조립체는 하우징, 센서 모듈, 신호 프로세서, 원형 커버, 케이스, 및 샤프트를 포함한다. 하우징은 제1 표면 및 제1 표면에 대향하는 제2 표면을 갖는다. 원형 캐비티는 제1 표면에 배치된다. 원형 벽은 원형 캐비티 주위에 원주를 형성하도록 제1 표면으로부터 길이 방향으로 연장된다. 원형 캐비티는 제1 내경을 갖는다. 센서 모듈은 신호 프로세서를 가진다. 센서 모듈은 원형 캐비티의 제1 내경 내에 배치된다. 원형 커버는 내부 표면 및 대향하는 외부 표면을 형성하기 위해 전면으로부터 후면으로 길이 방향으로 연장되는 원통형 환형 챔버(cylindrical annulus chamber)를 갖는다. 원형 커버는 원형 캐비티의 제1 내경 내에 배치되도록 구성된다. 케이스는 제1 케이스 표면, 제2 케이스 표면 및 환형 보어(annulus bore)를 갖는다. 환형 보어는 길이 방향으로 연장된다. 제1 케이스 표면은 환형 보어에 대해 환형 표면 부분을 가진다. 샤프트는 제1 외경, 제1 단부 및 제1 단부에 대향하는 제2 단부를 갖는다. 반원형 돌출부는 샤프트의 제1 단부로부터 연장되고, 제1 외경 내에 있다. 반원형 돌출부는 직선 에지 커플러(straight edge coupler)를 형성한다. 샤프트의 제2 단부는 케이스의 환형 보어 내에 배치되도록 구성된다. 제1 단부의 직선 에지 커플러는 원형 커버의 원통형 환형 챔버 내로 연장되도록 구성된다. 센서 모듈은 송신기 코일 및 수신 코일을 갖는다. 송신기 코일은 제2 내경 및 제2 외경을 갖는다. 수신 코일은 제3 외경을 갖는다. 송신기 코일 및 수신 코일은 원형 인쇄 회로 기판 상에 동축으로 배치되어, 수신 코일의 제3 외경이 송신기 코일의 제2 내경 내에 배치된다. 신호 프로세서는 수신 코일의 제3 외경 내에 배치된다. 샤프트의 제1 외경과 송신기 코일의 제2 외경은 환형 보어의 제1 내경 내에 있다. 센서 모듈, 원형 커버, 케이스, 및 샤프트는 원형 캐비티의 제1 내경 내에서 원형 캐비티의 중심 축에 대하여 동심으로 위치한다. 샤프트의 제2 단부는 환형 보어 내에서 회전하도록 구성되고 직선 에지 커플러는 원형 커버의 원통형 환형 챔버 내에서 회전하여 센서 모듈이 직선 에지 커플러를 감지하도록 구성된다.
본 명세서에 기술된 실시예들에 의해 제공되는 이들 및 추가 특징들은 도면을 관련하여 이하의 상세한 설명을 고려하여 더 완전히 이해될 것이다.
도면에 제시된 실시예는 본질적으로 예시적이고, 설명하기 위한 것이며, 청구범위에 의해 한정되는 본 발명의 주제를 제한하기 위한 것이 아니다. 예시적인 실시예들의 이하의 상세한 설명은 다음의 도면들과 함께 읽는 경우에 이해될 수 있으며, 여기서 유사한 구조는 유사한 참조 번호로 지시된다:
도 1은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 유도형 센서 조립체의 분해도를 개략적으로 도시한다.
도 2는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 송신기 코일 및 수신 코일 유도형 센서의 평면도를 개략적으로 도시한다.
도 3은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 신호 프로세서를 포함하는 유도형 센서의 평면도를 개략적으로 도시한다.
도 4는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 3의 신호 프로세서의 분리된 평면도를 개략적으로 도시한다.
도 5는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 샤프트의 사시도를 개략적으로 도시한다.
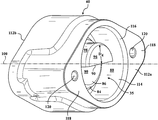
도 6은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 유도형 센서 조립체의 사시도를 개략적으로 도시한다.
도 7은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 유도형 센서 조립체의 정면도를 개략적으로 도시한다.
도 8은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 원통형 트랜스퍼 케이스(cylindrical transfer case) 내의 샤프트를 도시한 유도형 센서 조립체의 사시도를 개략적으로 도시한다.
도 1은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 유도형 센서 조립체의 분해도를 개략적으로 도시한다.
도 2는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 송신기 코일 및 수신 코일 유도형 센서의 평면도를 개략적으로 도시한다.
도 3은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 신호 프로세서를 포함하는 유도형 센서의 평면도를 개략적으로 도시한다.
도 4는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 3의 신호 프로세서의 분리된 평면도를 개략적으로 도시한다.
도 5는 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 샤프트의 사시도를 개략적으로 도시한다.
도 6은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 유도형 센서 조립체의 사시도를 개략적으로 도시한다.
도 7은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 도 1의 유도형 센서 조립체의 정면도를 개략적으로 도시한다.
도 8은 본원에 도시되고 기술된 하나 이상의 실시예에 따른 원통형 트랜스퍼 케이스(cylindrical transfer case) 내의 샤프트를 도시한 유도형 센서 조립체의 사시도를 개략적으로 도시한다.
본 발명의 실시예는 송신 및 수신 코일에 의해 둘러싸인 중심 영역에 위치된 신호 프로세서를 갖는 PCB 상에 형성된 송신 및 수신 코일을 가지는 센서 모듈을 포함하는 신규한 유도형 회전 위치 센서에 관한 것이다. 이러한 배치는 보다 소형의 센서 모듈을 허용한다. 전체 센서 모듈은 위치가 감지되는 회전 요소의 직경과 일반적으로 동일한 직경을 갖는 캐비티 내부에 위치될 수 있다. 이러한 배치는 또한 타겟의 단부에 커플러가 형성될 수 있게 한다. 센서는 샤프트 및 보어와 동심이다. 센서는 비접촉식이며 이동 가능한 부분을 가지고 있지 않다.
도 1 내지 도 4를 참조하면, 도 1이 유도형 센서 조립체(10)의 분해도를 개략적으로 도시하고, 도 2 내지 도 3은 유도형 센서 조립체(10)의 조립된 도면을 개략적으로 도시하며, 도 4는 샤프트(35)의 분리도를 개략적으로 도시한다. 유도형 센서 조립체(10)는 하우징(15), 센서 모듈(20), 원형 커버(25), 탄성 부재(30), 샤프트(35), 및 케이스(40)(도 8)를 포함한다.
하우징(15)은 오버몰드일 수 있고, 제1 표면(42a) 및 제1 표면(42a)에 대향하는 제2 표면(42b)을 포함한다. 원형 캐비티(44)는 제1 표면(42a)에 배치된다. 원형 벽(46)은 원형 캐비티(44)의 외경 또는 원주(C1)를 형성하도록 제1 표면(42a)으로부터 길이 방향으로 연장된다. 원형 캐비티(44)는 제1 내경(D1) 및 후면(50)을 형성하도록 인접한 원형 내부 표면(48)을 갖는다. 하우징(15)의 제1 표면(42a)은 원형 벽(46)으로부터 반경 방향 외측으로 연장되는 한 쌍의 이어부(ear)(54)를 포함한다. 한 쌍의 이어부(54)에서, 각 이어부는 이에 한정되지는 않지만 볼트, 나사, 볼트 및 너트, 못, 리벳, 및/또는 그와 유사한 것과 같은 패스너를 위해 구성된 제1 어퍼쳐(aperture)(56)를 갖는다. 하우징(15)에는 또한 센서 모듈(20)의 출력을 원격 시스템에 연결하기 위한 커넥터(52)가 제공된다. 후면(50)으로부터 멀어지도록 연장되는 것은 복수의 전자 핀 커넥터(60)일 수 있다. 복수의 전자 핀 커넥터(60)는 이하에서 상세히 논의되는 바와 같이 센서 모듈(20)과 맞물리도록 구성될 수 있다.
센서 모듈(20)은 신호 프로세서(61)를 갖는다(도 6). 센서 모듈(20)은 원형 인쇄 회로 기판(PCB)(62) 상에 배치된다. 원형 PCB(62)는 원형 PCB(62)의 외부 에지에 인접한 복수의 홀(64)을 더 포함한다. 복수의 홀(64)은 복수의 홀(64)과 접촉하는 임의의 전기적 물체 또는 복수의 홀(64)과 상호 작용하도록 구성된 전기적 결합 또는 트레이싱을 포함할 수 있어서, 원형 PCB(62)가 후면(50)에 대해 안착되는 경우, 복수의 전자 핀 커넥터(60)는 센서 모듈(20)이 하우징(15)의 커넥터(52)에 통신 가능하게 결합되도록 복수의 홀(64)과 정렬되고 적어도 접촉한다. 이와 같이, 원형 PCB(62)의 제2 외경 또는 제2 원주(C2)는 원형 캐비티(44)의 내경 D1과 실질적으로 유사하거나, 또는 더 작아서, 원형 PCB(62)가 원형 캐비티(44)의 내부에 삽입되거나 안착될 수 있음을 이해해야 한다. 또한, 복수의 전자 핀 커넥터(60)는 원형 PCB(62)가 원형 캐비티(42) 내에 안착된 상태에서 복수의 홀(64)을 통해 연장될 수 있음을 이해해야 한다.
또한, 원형 PCB(62)는 안착된 위치에 있는 동안 후면(50)과 접촉하거나 접촉하지 않을 수 있다는 것을 이해해야만 한다. 또한, 복수의 전자 핀 커넥터(60) 및 복수의 홀(64)이 원형 캐비티(44) 및 원형 PCB(62) 각각의 상부 근처에 있는 것으로 예시되어 있지만, 이러한 배치는 예시적인 목적을 위한 것이며 복수의 전자 핀 커넥터(60) 및 복수의 홀(64)은 원형 캐비티(44) 또는 원형 PCB(62) 각각의 어느 곳에서나 존재할 수 있다.
"통신적으로 결합된"이라는 문구는 트랜스퍼 케이스 환경 내에서 샤프트의 단부 내에 통합된 타겟을 감지하기 위한 유도형 센서 조립체(10)의 다양한 구성 요소의 상호 연결성을 기술하기 위해 본원에서 사용되고, 이는 구성 요소가 와이어, 광섬유, 또는 무선으로 연결되어 전기적, 광학적, 및/또는 전자기 신호가 구성 요소 사이에서 교환될 수 있다는 것을 의미한다. 본 명세서에서 구체적으로 기술되지 않은 시스템의 다양한 구성 요소들을 연결하는 다른 수단이 본 개시의 범위를 벗어나지 않으면서 본원에 포함된다는 것이 이해되어야 한다.
원형 커버(25)는 내부 표면(72a) 및 대향하는 외부 표면(72b)을 형성하기 위해 전면(68)으로부터 후면(70)으로 길이 방향으로 연장되는 원통형 환형 챔버(66)를 갖는다. 내부 표면(72a)은 제2 내경(D2)를 갖는다. 전면(68)은 제1 환형 표면일 수 있다. 원형 커버(25)는 원형 캐비티(44)의 제1 내경(D1) 내에 배치되도록 구성된다. 이와 같이, 외부 표면(72b)의 제3 외경 또는 제3 원주(C3)는 원형 캐비티(44)의 제1 내경(D1)과 실질적으로 유사하거나 작을 수 있다. 또한, 후면(70)은 원형 커버(25)가 적어도 부분적으로 원형 캐비티(44) 내에 안착될 때 원형 PCB(62)에 인접하도록 구성된다. 이와 같이, 일부 실시예에서, 원형 커버(25)의 후면(70)은 원형 PCB(62)의 적어도 부분에 인접하거나 접촉할 수 있다. 원형 커버(25)는 스핀 용접 커버(spin weld cover)일 수 있다.
원형 커버(25)의 내부 표면(72a)은 제1 그루브(74)를 포함한다. 또한, 원형 커버(25)의 외부 표면(72b)은 제2 그루브(76)를 포함한다. 제1 그루브(74) 및 제2 그루브(76)는 각각 전면(67) 및 후면(70)으로부터 이격되어 있다. 또한, 제1 그루브(74)는 내부 표면(72a)의 원주를 연장하는 원형일 수 있는 반면, 제2 그루브(76)는 외부 표면(72b)의 원주를 연장하는 원형일 수 있다.
탄성 부재(30)는 제3 내경(D3)을 갖는 O-링일 수 있다. 제3 내경(D3)은 원형 커버(25)의 외부 표면(72b)의 제2 그루브(76)와 핀치 피트 결합(pinch fit engagement)을 갖도록 구성된다. 탄성 부재(30)는 이하에서 더 상세히 논의되는 바와 같이 케이스(40) (도 8) 내에서 하우징(15)을 반경 방향으로 밀봉하기에 적합한 임의의 재료로 구성될 수 있다.
샤프트(35)는 제1 단부(80) 및 제2 단부(82)를 갖는다. 제2 단부(82)는 제1 단부(80)에 대향한다. 제2 단부는 일반적으로 유도형 센서 조립체(10)의 최대 원주보다 큰 제4 외경 또는 제4 원주(C4)를 가진다. 제1 단부(80)는 제1 단부(80) 내에 더 작은 평면 부분(86)을 형성하는 베벨 부분(bevel portion)(84)을 갖는다. 돌출부(88)는 샤프트(35)의 제1 단부(80)의 평면 부분(86)으로부터 연장된다. 이와 같이, 돌출부(88)는 제4 외경 또는 제4 원주(C4) 내에 있다. 즉, 돌출부(88)는 임의의 방향으로 제4 원주(C4)를 넘어 반경 방향으로 연장되지 않는다. 또한, 돌출부(88)는 아래에서 상세히 기술되는 바와 같이 원형 커버(25)의 제2 내경(D2)를 넘어 연장되지 않는다는 것을 이해해야 한다. 돌출부(88)는 직경 D4를 갖는 반원 형상일 수 있으며, 본원에서 더 상세히 논의될 바와 같이 직선 에지 커플러(90), 면 부분(96), 및 측벽 부분(98)을 형성한다. 이와 같이, 본 명세서에서, 돌출부는 반원형 돌출부(88)로 지칭될 수 있지만, 돌출부는 반원형으로 한정되지는 않는다. 반원형 돌출부(88)는 챔퍼처리된(chamfered) 에지 부분(92)을 가질 수 있다. 면 부분(96)은 챔퍼처리된 에지 부분(92)과 직선 에지 커플러(90) 사이에서 연장된다. 면 부분(96)은 아래에서 더 상세히 기술되는 바와 같이 센서 모듈(20)로부터 미리 결정된 거리에 위치되도록 구성된다. 복수의 기어(94)는 제2 단부(82)로부터 원형 방향으로 대칭적으로 투영되거나 또는 연장될 수 있다. 일부 실시예에서, 복수의 기어(94)는 제4 원주(C4)의 적어도 일부를 형성할 수 있다. 다른 실시예에서, 제4 원주는 샤프트(35)의 에지에 의해 형성된다.
제1 단부(80)의 직선 에지 커플러(90)를 갖는 반원형 돌출부(88)는 원형 커버(25)의 원통형 환형 챔버(66) 내로 연장되도록 구성된다. 이와 같이, 베벨 부분(84) 및/또는 평면 부분(86)은 원형 커버(25)의 전면(68)과 접촉할 수 있다. 반원형 돌출부(88)는 길이 방향으로 원통형 환형 챔버(66) 내로 미리 결정된 거리만큼 연장될 수 있어서, 면 부분과 직선 에지 커플러(90)가 원형 커버(25)의 후면(70)으로부터 미리 결정된 거리에 있도록 한다.
샤프트(35)의 반원형 돌출부(88)는 원형 커버(25)의 원통형 환형 챔버(66) 내에서 회전하도록 구성되어서, 센서 모듈(20)은 본원에서 더 상세히 논의되는 바와 같이 회전하는 동안 반원형 돌출부(88)의 직선 에지 커플러(90)를 감지할 수 있도록 한다는 것을 이해해야 한다. 또한, 샤프트(35)는 트랜스퍼 케이스 샤프트일 수 있음을 이해해야 한다. 또한, 반원형 돌출부(88)는 원형 커버(25)의 제1 그루브(74)와 맞물리도록 구성된 키이홈(keyway)을 포함할 수 있음을 이해해야 한다. 이와 같이, 키이홈은 원형 커버(25)의 제1 그루브(74) 내에서 샤프트(35)와 함께 회전할 것이다.
센서 모듈(20), 원형 커버(25), 탄성 부재(30), 샤프트(35), 및 케이스(40)(도 8)는 원형 캐비티(42)의 제1 내경(D1) 내에서 원형 캐비티(42)의 중심 축(100)에 대하여 동심으로 위치된 것으로 이해되어야 한다. 또한, 샤프트(35)는 트랜스퍼 케이스 샤프트일 수도 있고, 케이스(40)(도 8)는 트랜스퍼 케이스일 수 있음을 이해해야 한다.
이제 도 5 내지 도 7을 참조하면, 센서 모듈(20)에 대해 보다 상세하게 기술될 것이다. 센서 모듈(20)은 송신기 코일(102), 수신 코일(104), 및 신호 프로세서(61)를 포함한다. 신호 프로세서(61)는 센서 모듈(20)에 의해 생성되고 수신된 신호를 측정하고 처리한다. 신호 프로세서(61)는 또한 센서 모듈(20)의 다양한 신호를 전송하는 복수의 제2 핀(110)에 연결된다. 송신기 코일(102)은 일반적으로 원형이고 복수의 권선을 포함할 수 잇으며, 이는 설계 파라미터에 따라 필요에 따라 조정될 수 있다. 송신기 코일(102)은 원형을 갖는 것으로 도시되어 있지만, 본 발명의 범위를 벗어나지 않으면서 다른 실시예가 가능하다.
송신기 코일(102)은 내경(D5)과 외경 또는 원주(C5)를 갖는다. 수신 코일(104)은 가상의 내경(D6)을 형성하고 외경 또는 원주(C6)를 형성하기 위해 중심점(106)을 기준으로 동축으로 외경 또는 원주(C7)로부터 반경 방향 외측으로 연장되는 복수의 코일(104a)을 포함한다. 이와 같이, 그리고 도 5 내지 도 6에 가장 잘 보여지는 바와 같이, 수신 코일(104)은 미리 결정된 정도만큼 동일하게 오프셋될 수 있다.
송신기 코일(102) 및 수신 코일(104)은 원형 PCB(62) 상에 동축으로 배치되어서, 수신 코일(104)의 제6 원주(C6)가 송신기 코일(102)의 내경(D5) 내에 배치된다. 또한, 도 6에서 가장 잘 보여지는 바와 같이, 신호 프로세서(61)는 수신 코일(104)의 원주(C6) 내에 배치된다. 이와 같이, 이러한 배치는 원형 PCB(62)가 상술한 바와 같이 원형 캐비티(44)(도 1) 내에 삽입될 수 있게 한다. 즉, 신호 프로세서(61)의 배치는 단일 패키지에 끼워질 수 있는 소형화된 설계를 특징으로 하여서, 이러한 배치는 신호 프로세서(61)가 샤프트(35) 및 원형 캐비티(44)와 동심이 되도록 한다.
또한, 복수의 이산적인 구성 요소(108)는 적어도 부분적으로 수신 코일 원주(C6)의 외부에 있는 원형 PCB(62) 상에 배치될 수 있음을 이해해야 한다. 이러한 이산적인 구성 요소(108)는 커패시터, 저항기, 또는 당업계에 공지된 다른 기본적인 전자 구성요소를 포함할 수 있다. 또한, 원형 PCB(62)는 센서 모듈(20)의 제조에 사용되며, 송신기 코일(102) 및 수신 코일(104)은 통상의 기술자에게 공지된 바와 같이 PCB 상에 제조된다. 또한, 송신기 코일(102) 및 수신 코일(104)은 회로 보드 상에 제조될 수 있다. 또한, PCB 또는 회로 보드는 원형일 필요는 없으며, 정사각형, 계란형(oval), 육각형, 타원형(elliptical), 및/또는 그와 유사한 형상을 가질 수 있고, 이에 한정되는 것은 아니다.
센서 모듈(20)의 송신기 코일(102)은 외부 전원(도시되지 않음)에 의해 동력이 공급된다. 센서 모듈(20)은 도 5에 가장 잘 도시된 바와 같이 샤프트(35)의 반원형 돌출부(88)의 직선 에지 커플러(90)의 회전 위치를 측정하도록 구성된다. 반원형 돌출부(88)의 직선 에지 커플러(90)는 커플러로서 작용하여서, 수신 코일(104)은 직선 에지 커플러(90)를 검출하고 측정하도록 구성된다. 신호 프로세서(61)는 반원형 돌출부(88)와 센서 모듈(20) 사이의 커플링 인자를 비교함으로써 반원형 돌출부(88)의 회전 위치를 계산한다.
반원형 돌출부(88)가 송신기 코일(102)의 축을 중심으로 회전함에 따라 수신 코일(104)과 중첩하는 직선 에지 커플러(90)의 부분이 변한다. 이는 차례로 돌출부와 수신 코일(104) 사이의 커플링 인자의 양을 변화시킨다. 수신 코일(104)에 의해 측정된 신호를 사용하여, 신호 프로세서(61)는 센서 모듈(20)에 대한 샤프트(35)의 회전 위치를 나타내는 출력 신호를 생성한다.
이제 도 8을 참조하면, 케이스(400 내의 샤프트(35)의 사시도가 개략적으로 도시되어 있다. 케이스(40)는 일반적으로 트랜스퍼 케이스로 구성된 원통형 케이스다. 케이스(40)는 제1 케이스 표면(112a), 제2 케이스 표면(112b), 및 중심 또는 길이 방향 축(100)을 따라 연장되는 환형 보어(114)를 갖는다. 제1 케이스 표면(112a)은 환형 보어(114)에 대하여 환형 표면 부분(116)을 갖는다. 케이스(40)는 환형 보어(114)로부터 반경 방향 외측으로 연장되는 한 쌍의 플랜지(118)를 포함한다. 한 쌍의 플랜지(118) 중 각각은 볼트, 나사, 볼트 및 너트, 못, 리벳 및/또는 그와 유사한 것과 같지만 이에 한정되지는 않는 패스너를 위해 구성된 제2 어퍼쳐(120)를 갖는다. 한 쌍의 이어부(54)와 한 쌍의 플랜지(118)는 하우징(15)이 케이스(40)에 장착되도록 중심 또는 길이 방향 축(100)을 따라 제1 어퍼쳐(56) 및 제2 어퍼쳐(120)가 정렬되도록 서로 인접하도록 구성된다.
샤프트(35)는 케이스(40)와 함께 하우징된다. 샤프트(35)의 제2 단부(82)(도 1)는 제2 케이스 표면(112b)을 향하고 샤프트의 제1 단부(80)는 환형 표면 부분(116)을 향한다. 샤프트(35)는 통상의 기술자에게 이해되는 바와 같이 트랜스퍼 케이스의 기계 동력 또는 전력에 의해 회전된다. 탄성 부재(30)(도 1) 및 원형 커버(25)(도 1)는, 하우징(15)이 트랜스퍼 케이스(40)에 장착되는 경우에 환형 보어(114)와 핀치 피트 결합을 갖는다. 즉, 탄성 부재(30)는, 탄성 커버(25)가 케이스(40) 내에 적어도 부분적으로 안착되는 경우 환형 보어(114)와 접촉할 수 있다. 이와 같이, 하우징(15)은 케이스(40)에 밀봉될 수 있다. 따라서, 전체 센서 모듈(20)은 환형 보어(114) 내부에 수용되어 케이스(40)를 수정하지 않고 및/또는 샤프트(35)를 연장하지 않고도 샤프트(35)의 제1 단부(80)를 감지하기 위해 접근하고 반경 방향 밀봉을 허용할 수 있다.
전술한 내용으로부터, 본 발명은 샤프트 및 환형 보어를 갖는 동심 감지 모듈 회전 위치 센서(concentric sensing module rotary position sensor)를 제공한다는 것을 볼 수 있다. 더욱이, 전체 PCB 및 유도형 코일은 환형 보어 내부에 맞으며, 이는 샤프트를 연장하지 않고도 샤프트의 끝을 감지하기 위한 접근과 방사형 밀봉을 허용한다. 또한, 감지된 타겟은 샤프트에 부착되거나 장착된 별도의 타겟 대신 샤프트 기하학적 구조에 통합된다. 이러한 배치는 센서 모듈에 움직이는 부분이 없는 경우에 비접촉 감지를 허용한다.
"실질적으로", 및 "약"이라는 용어는 본 명세서에서 임의의 정량적 비교, 값, 측정, 또는 다른 표현에 기인할 수 있는 고유한 불확실성 정도를 나타내기 위해 이용될 수 있다. 이들 용어는 또한 결과적으로 문제의 주제의 기본 기능을 변화시키지 않으면서 정량적 표현이 언급된 기준과 다를 수 있는 정도를 나타내는데 사용된다.
특정 실시예들이 본원에 기술되고 도시되었지만, 이는 청구된 발명의 주제의 사상 및 범위를 벗어나지 않고 다양한 다른 변경 및 수정이 이루어질 수 있음을 이해해야 한다. 또한, 청구된 주제의 다양한 양태가 본 명세서에서 기술되었지만, 이러한 양태는 조합하여 이용될 필요는 없다. 따라서, 첨부된 청구 범위는 청구된 주제의 범위 내에 있는 그러한 모든 변경 및 수정을 포함하는 것으로 의도된다.
Claims (20)
- 유도형 센서로서,
센서 모듈;
신호 프로세서; 및
캐비티(cavity)를 갖는 하우징을 포함하고,
상기 센서 모듈은 송신기 코일 및 수신 코일을 포함하고, 상기 송신기 코일은 제2 내경(inner diameter) 및 제1 외경(outer diameter)을 가지며, 상기 수신 코일 및 상기 신호 프로세서는 상기 송신기 코일의 제2 내경 내에 배치되며, 상기 송신기 코일의 제1 외경은 상기 캐비티 내에 있는,
유도형 센서. - 제1항에 있어서,
상기 하우징은 제1 표면 및 대향하는 제2 표면을 가지며,
상기 캐비티는 상기 제1 표면에 배치되고,
상기 캐비티는 원형이면서 또한 제1 내경을 갖는,
유도형 센서. - 제2항에 있어서,
상기 센서 모듈은 상기 캐비티의 제1 내경 내에서 상기 캐비티의 중심 축에 대하여 동심으로 위치하는,
유도형 센서. - 제1항에 있어서,
상기 송신기 코일 및 상기 수신 코일은 인쇄 회로 기판(printed circuit board) 상에 형성되는,
유도형 센서. - 제4항에 있어서,
상기 인쇄 회로 기판은 원형이고, 상기 인쇄 회로 기판은 상기 캐비티의 제1 내경과 실질적으로 동일한 기판 외경을 갖는,
유도형 센서. - 제4항에 있어서,
상기 송신기 코일 및 상기 수신 코일은 상기 인쇄 회로 기판 상에 동축으로 배치되는,
유도형 센서. - 제2항에 있어서, 상기 유도형 센서는,
상기 캐비티의 원주를 형성하도록 상기 제1 표면으로부터 길이 방향으로 연장되는 원형 벽을 더 포함하고,
상기 센서 모듈은 상기 캐비티 내에 배치되는,
유도형 센서. - 제1항에 있어서, 상기 유도형 센서는,
제2 외경을 갖는 수신 코일을 더 포함하고,
상기 신호 프로세서는 상기 수신 코일의 제2 외경 내에 배치되는,
유도형 센서. - 유도형 센서 조립체로서,
센서 모듈;
신호 프로세서;
제1 외경, 제1 단부 및 상기 제1 단부에 대향하는 제2 단부를 가지는 샤프트(shaft)로서, 상기 샤프트의 제1 단부로부터 제1 외경 내에서 연장되는 돌출부를 가지는, 샤프트; 및
캐비티를 가지는 하우징을 포함하고,
상기 센서 모듈은 송신기 코일 및 수신 코일을 가지고, 상기 송신기 코일은 제2 내경 및 제2 외경을 가지고, 상기 수신 코일 및 상기 신호 프로세서는 상기 송신기 코일의 제2 내경 내에 배치되며, 상기 샤프트의 제1 외경 및 상기 송신기 코일의 제2 외경은 상기 캐비티의 제1 내경 내에 있는,
유도형 센서 조립체. - 제9항에 있어서,
상기 하우징은 제1 표면 및 대향하는 제2 표면을 가지고,
상기 캐비티는 상기 제1 표면에 배치되며,
상기 제1 표면으로부터 길이 방향으로 원형 벽이 연장되고, 상기 원형 벽은 상기 캐비티 주위에 원주를 형성하는,
유도형 센서 조립체. - 제9항에 있어서,
상기 샤프트 및 상기 센서 모듈은 상기 캐비티의 제1 내경 내에서 상기 캐비티의 중심 축에 대하여 동심으로 위치하는,
유도형 센서 조립체. - 제9항에 있어서,
상기 샤프트는 상기 돌출부를 회전시키도록 구성되는,
유도형 센서 조립체. - 제9항에 있어서,
상기 돌출부는 반원형이고 직선 에지 커플러를 형성하는,
유도형 센서 조립체. - 제13항에 있어서,
상기 센서 모듈은 상기 직선 에지 커플러를 감지하도록 구성되는,
유도형 센서 조립체. - 제10항에 있어서,
상기 송신기 코일 및 상기 수신 코일은 인쇄 회로 기판 상에 형성되고,
상기 송신기 코일 및 상기 수신 코일은 상기 인쇄 회로 기판 상에 동축으로 배치되며, 상기 인쇄 회로 기판은 상기 센서 모듈 및 상기 샤프트의 돌출부의 적어도 일부가 상기 캐비티의 제1 내경 내에 배치되도록 상기 캐비티의 제1 내경과 실질적으로 동일한 기판 원주를 가지는,
유도형 센서 조립체. - 제9항에 있어서, 상기 유도형 센서 조립체는,
제3 외경을 갖는 수신 코일을 더 포함하고,
상기 신호 프로세서는 상기 수신 코일의 제3 외경 내에 배치되는,
유도형 센서 조립체. - 제10항에 있어서, 상기 유도형 센서 조립체는,
내부 표면 및 대향하는 외부 표면을 형성하기 위해 전면으로부터 후면으로 길이 방향으로 연장되는 원통형 환형 챔버(cylindrical annulus chamber)를 가지고, 상기 캐비티의 제1 내경 내에 배치되도록 구성되는, 원형 커버; 및
제1 케이스 표면, 제2 케이스 표면, 및 환형 보어(annulus bore)를 가지는 케이스를 더 포함하고,
상기 환형 보어는 길이 방향 축을 따라 연장되고,
상기 제1 케이스 표면은 상기 환형 보어에 대해 환형 표면 부분을 갖는,
유도형 센서 조립체. - 제17항에 있어서,
상기 하우징의 제1 표면은 한 쌍의 이어부(ear)를 가지며,
각 이어부는 제1 어퍼쳐(aperture)를 가지고, 상기 케이스의 제1 케이스 표면은 한 쌍의 플랜지를 가지며, 각 플랜지는 제2 어퍼쳐를 가지고, 상기 한 쌍의 플랜지와 상기 한 쌍의 이어부는 서로 인접하도록 구성되고,
상기 제1 어퍼쳐 및 상기 제2 어퍼쳐는, 패스너가 상기 하우징을 상기 케이스에 결합시키기 위해 사용되도록 정렬되는,
유도형 센서 조립체. - 제17항에 있어서,
상기 센서 모듈, 상기 원형 커버, 상기 케이스, 및 상기 샤프트는 상기 캐비티의 제1 내경 내에서 상기 캐비티의 중심 축에 대하여 동심으로 위치하는,
유도형 센서 조립체. - 제17항에 있어서,
상기 케이스는 트랜스퍼 케이스(transfer case)이고, 상기 샤프트는 트랜스퍼 케이스 샤프트인,
유도형 센서 조립체.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201762548053P | 2017-08-21 | 2017-08-21 | |
| US62/548,053 | 2017-08-21 | ||
| PCT/US2018/000286 WO2019040095A1 (en) | 2017-08-21 | 2018-08-17 | INDUCTIVE SENSOR MODULE ASSEMBLY WITH CENTRAL SIGNAL PROCESSOR |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20200035054A true KR20200035054A (ko) | 2020-04-01 |
Family
ID=65360367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020207004428A KR20200035054A (ko) | 2017-08-21 | 2018-08-17 | 중심 신호 프로세서를 가지는 유도형 센서 모듈 조립체 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11353338B2 (ko) |
| KR (1) | KR20200035054A (ko) |
| CN (1) | CN111033182A (ko) |
| DE (1) | DE112018004745T5 (ko) |
| WO (1) | WO2019040095A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210144143A (ko) * | 2020-05-21 | 2021-11-30 | 주식회사 유라테크 | 차량 구동부 모터의 위치센서 |
Families Citing this family (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101397296B1 (ko) * | 2013-12-27 | 2014-05-22 | 도레이케미칼 주식회사 | 정삼투용 또는 압력지연 삼투용 다공성 유출관 및 이를 포함하는 정삼투 또는 압력지연 삼투 모듈 |
| KR102087835B1 (ko) * | 2018-08-31 | 2020-03-11 | 서울대학교 산학협력단 | 실버 나노와이어 박막 패터닝 방법 |
| US12013264B2 (en) | 2018-10-16 | 2024-06-18 | Kyocera Avx Components (Werne) Gmbh | Position sensing apparatus and method |
| US11703359B2 (en) | 2019-05-14 | 2023-07-18 | Kyocera Avx Components (Werne) Gmbh | Inductive position sensing apparatus including a screening layer and method for the same |
| DE102020203275A1 (de) * | 2020-03-13 | 2021-09-16 | Robert Bosch Gesellschaft mit beschränkter Haftung | Induktive Rotorlagesensoreinrichtung, Antriebseinrichtung |
| EP3896399B1 (en) * | 2020-04-15 | 2022-11-09 | TE Connectivity Belgium BVBA | Sensor device and sensor assembly for measuring the rotational position of an element |
| CN113933761B (zh) * | 2021-09-09 | 2022-09-27 | 中国地质大学(武汉) | 基于电容加载同轴谐振腔的ovh磁传感器腔体 |
| FR3144657A1 (fr) * | 2022-12-31 | 2024-07-05 | Sc2N | Capteur de position inductif avec unité de traitement à l’intérieur de l’élément d’émission |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3949339A (en) * | 1974-11-18 | 1976-04-06 | C. J. Kennedy Company | Angular position transducer |
| EP0295609A3 (en) * | 1987-06-15 | 1991-01-09 | Kollmorgen Corporation | Printed circuit windings for screened inductance sensors, especially sensors for level measurement |
| DE4113745C2 (de) * | 1991-04-26 | 1993-11-25 | Mehnert Walter Dr | Induktiver Stellungsgeber |
| DE19738836A1 (de) | 1997-09-05 | 1999-03-11 | Hella Kg Hueck & Co | Induktiver Winkelsensor |
| US7135855B2 (en) * | 2004-05-17 | 2006-11-14 | David Scott Nyce | Simplified inductive position sensor and circuit configuration |
| US7449878B2 (en) * | 2005-06-27 | 2008-11-11 | Ksr Technologies Co. | Linear and rotational inductive position sensor |
| US7562591B2 (en) | 2006-06-26 | 2009-07-21 | KRS Technologies Co. | Steering angle sensor |
| JP5133199B2 (ja) * | 2008-10-28 | 2013-01-30 | 株式会社ミツトヨ | 誘導検出型ロータリーエンコーダ |
| CN105164502B (zh) | 2013-05-03 | 2019-07-16 | Ksr Ip控股有限责任公司 | 微感应传感器 |
| US9285386B2 (en) | 2013-12-06 | 2016-03-15 | Rosemount Aerospace Inc. | Inductive rotational speed sensors |
| CN105180798B (zh) * | 2015-04-28 | 2018-02-06 | 嘉兴海格力思电子科技有限公司 | 角度传感器 |
| US9914477B2 (en) * | 2015-12-10 | 2018-03-13 | Ksr Ip Holdings Llc | Inductive steering torque and angle sensor |
-
2018
- 2018-08-17 CN CN201880053164.7A patent/CN111033182A/zh active Pending
- 2018-08-17 KR KR1020207004428A patent/KR20200035054A/ko unknown
- 2018-08-17 WO PCT/US2018/000286 patent/WO2019040095A1/en active Application Filing
- 2018-08-17 DE DE112018004745.8T patent/DE112018004745T5/de active Pending
- 2018-08-17 US US15/999,070 patent/US11353338B2/en active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210144143A (ko) * | 2020-05-21 | 2021-11-30 | 주식회사 유라테크 | 차량 구동부 모터의 위치센서 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111033182A (zh) | 2020-04-17 |
| US11353338B2 (en) | 2022-06-07 |
| WO2019040095A1 (en) | 2019-02-28 |
| US20190056244A1 (en) | 2019-02-21 |
| DE112018004745T5 (de) | 2020-06-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200035054A (ko) | 중심 신호 프로세서를 가지는 유도형 센서 모듈 조립체 | |
| JP2022123048A (ja) | モジュラリゼーションロボットの構成に用いられるサブユニットモジュール | |
| CN210981599U (zh) | 扭矩角度传感器 | |
| US8823366B2 (en) | Non-contacting sensor assembly | |
| CN105987657B (zh) | 用于转轴的电涡流传感器和转轴装置 | |
| JP2018200823A (ja) | コネクタ装置 | |
| TW202035960A (zh) | 感測器組件及物理量測定裝置 | |
| KR20140005061A (ko) | 절대위상각 검출을 이용한 조향장치의 토크센서 | |
| CN205593543U (zh) | 检测目标构件位置的传感器系统 | |
| JP7247318B2 (ja) | 回転角度測定システム | |
| US20220244077A1 (en) | Dual rotary variable differential transducer | |
| JP2013061171A (ja) | レゾルバ及びレゾルバ付き転がり軸受装置 | |
| TWI712753B (zh) | 線性傳動裝置 | |
| JP7420840B2 (ja) | トルクセンサ、操舵角度センサおよび対応する統合型のセンサならびに監視システム | |
| EP3029442A1 (en) | Electric bicycle motor | |
| JP6868131B1 (ja) | リニア伝動装置 | |
| CN103851997B (zh) | 感测装置 | |
| JP2006234787A (ja) | 変位センサ | |
| TWI480520B (zh) | 感測裝置 | |
| JP4054693B2 (ja) | 静電容量式変位測定器 | |
| JP6177435B2 (ja) | 車両内の回転部材の回転角度を検出するセンサ装置 | |
| JPS58167934A (ja) | トルク検出装置 | |
| KR102678112B1 (ko) | 선형 동력 전달 장치 | |
| JP7204091B2 (ja) | トルク変換器 | |
| KR101834939B1 (ko) | 비접촉식 광전송 방식 토크 검출기 |