KR20190000825A - 3d 스캔이 가능한 이동 단말 - Google Patents
3d 스캔이 가능한 이동 단말 Download PDFInfo
- Publication number
- KR20190000825A KR20190000825A KR1020180071827A KR20180071827A KR20190000825A KR 20190000825 A KR20190000825 A KR 20190000825A KR 1020180071827 A KR1020180071827 A KR 1020180071827A KR 20180071827 A KR20180071827 A KR 20180071827A KR 20190000825 A KR20190000825 A KR 20190000825A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile terminal
- subject
- camera
- image
- data
- Prior art date
Links
Images







Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1072—Measuring physical dimensions, e.g. size of the entire body or parts thereof measuring distances on the body, e.g. measuring length, height or thickness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/103—Detecting, measuring or recording devices for testing the shape, pattern, colour, size or movement of the body or parts thereof, for diagnostic purposes
- A61B5/107—Measuring physical dimensions, e.g. size of the entire body or parts thereof
- A61B5/1079—Measuring physical dimensions, e.g. size of the entire body or parts thereof using optical or photographic means
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/72—Mobile telephones; Cordless telephones, i.e. devices for establishing wireless links to base stations without route selection
- H04M1/724—User interfaces specially adapted for cordless or mobile telephones
- H04M1/72403—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality
-
- H04M1/72522—
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2201/00—Electronic components, circuits, software, systems or apparatus used in telephone systems
- H04M2201/34—Microprocessors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2201/00—Electronic components, circuits, software, systems or apparatus used in telephone systems
- H04M2201/36—Memories
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M2250/00—Details of telephonic subscriber devices
- H04M2250/52—Details of telephonic subscriber devices including functional features of a camera
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Dentistry (AREA)
- Molecular Biology (AREA)
- Physics & Mathematics (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Human Computer Interaction (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Length Measuring Devices By Optical Means (AREA)
Abstract
본 발명은 3D 스캔에 의한 신체 치수 측정에 관한 것이다. 본 발명의 일 실시예에 따르면, 3D 스캔에 의한 신체 치수 측정이 가능한 이동 단말이 제공된다. 이동 단말은, 시야각 내에 위치한 신체를 촬영하는 카메라, 상기 이동 단말의 가속도를 검출하는 가속도 센서, 상기 이동 단말의 회전각을 검출하는 자이로 센서 및 상기 검출된 가속도 및 상기 회전각을 참조하여, 상기 카메라가 촬영한 상기 신체의 영상으로부터 상기 신체의 고유 3D 데이터를 산출하는 프로세서를 포함하되, 상기 프로세서는, 선택된 신체 유형에 연관된 표준 3D 데이터를 선택하고, 상기 카메라를 구동하여 상기 신체의 적어도 두 면을 스캐닝하되, 상기 카메라는 상기 신체를 향하도록 유지되면서 상기 피사체 주변을 회전하고, 상기 회전각 및 상기 카메라와 지면간 수평 및 수직 각도를 이용하여 상기 카메라가 촬영한 영상의 왜곡을 보정하며, 상기 표준 3D 데이터를 참조하여, 보정된 영상을 이용하여 상기 선택된 신체 유형에 따른 고유 3D 데이터를 산출할 수 있다.
Description
본 발명은 3D 스캔에 의한 신체 치수 측정에 관한 것이다.
의류나 신발과 같은 제품은 다양한 크기로 대량 생산된다. 크기는 규격화되어 있기 때문에, 대부분의 소비자는 자신의 신체 치수, 예를 들어, 키, 허리 둘레, 발 길이 등을 알고 있으며, 이를 기준으로 제품을 선택한다. 규격화된 신체 치수는 대량 생산에 적합하며, 이로 인해 생산 원가가 낮아진다.
그러나 최근 들어 소득이 높아지고, 자신의 체형에 맞는 제품을 찾는 소비자가 늘어나고 있다. 특히, 특수한 목적을 가진 제품, 예를 들어, 운동화나 장갑 등을 맞춤 제작하길 원하는 수요가 꾸준히 증가하고 있다. 맞춤 제작을 위해서는 신체 치수를 정밀하게 측정할 필요가 있다. 하지만 정밀 측정을 위해서는 매장을 방문하여야 하는 번거로움이 있다. 이를 피하기 위해 소비자 스스로 신체 치수를 측정할 수도 있지만, 정확한 측정이 어렵다는 문제가 있다.
본 발명은 스마트 폰과 같은 이동 단말을 이용하여 정밀한 신체 치수 측정을 가능하게 하고자 한다.
본 발명의 일 실시예에 따르면, 3D 스캔에 의한 신체 치수 측정이 가능한 이동 단말이 제공된다. 이동 단말은, 시야각 내에 위치한 신체를 촬영하는 카메라, 상기 이동 단말의 가속도를 검출하는 가속도 센서, 상기 이동 단말의 회전각을 검출하는 자이로 센서 및 상기 검출된 가속도 및 상기 회전각을 참조하여, 상기 카메라가 촬영한 상기 신체의 영상으로부터 상기 신체의 고유 3D 데이터를 산출하는 프로세서를 포함하되, 상기 프로세서는, 선택된 신체 유형에 연관된 표준 3D 데이터를 선택하고, 상기 카메라를 구동하여 상기 신체의 적어도 두 면을 스캐닝하되, 상기 카메라는 상기 신체를 향하도록 유지되면서 상기 피사체 주변을 회전하고, 상기 회전각 및 상기 카메라와 지면간 수평 및 수직 각도를 이용하여 상기 카메라가 촬영한 영상의 왜곡을 보정하며, 상기 표준 3D 데이터를 참조하여, 보정된 영상을 이용하여 상기 선택된 신체 유형에 따른 고유 3D 데이터를 산출할 수 있다.
일 실시예로, 상기 신체는 손이며, 상기 프로세서는, 상기 손의 측정되지 않은 분절의 수치 정보를 3D 빅데이터로부터 획득할 수 있다.
일 실시예로, 상기 프로세서는, 상기 가속도 및 상기 회전각을 이용하여 상기 이동 단말과 상기 신체간 거리를 산출하며, 상기 거리 및 상기 시야각을 이용하여 상기 신체의 길이를 측정할 수 있다.
일 실시예로, 상기 자이로 센서는, 상기 이동 단말의 수평 각도 및 수직 각도를 측정하며, 상기 프로세서는, 측정된 수평 각도 및 수직 각도를 이용하여 상기 영상 왜곡을 보정할 수 있다.
본 발명의 다른 실시예에 따르면, 3D 스캔에 의한 신체 치수 측정이 가능한 이동 단말이 제공된다. 이동 단말은, 선택된 피사체 유형에 연관된 대표 사이즈를 제공하고, 상기 피사체 유형에 따른 피사체의 대표적인 형태 또는 상기 대표 사이즈를 결정하는 측정 대상을 표현하는 피사체 프레임을 생성하고, 상기 피사체 프레임과 상기 피사체를 촬영하여 생성한 영상을 중첩하여 표시하고, 상기 피사체 프레임과 상기 영상이 일치되면 상기 영상을 저장하며, 저장된 영상에서 상기 피사체의 수치를 측정할 수 있다.
본 발명에 따르면, 신체 치수 측정에 전문성이 없더라도 이동 단말을 이용하면 정밀한 측정이 가능하게 된다.
이하에서, 본 발명은 첨부된 도면에 도시된 실시예를 참조하여 설명된다. 이해를 돕기 위해, 첨부된 전체 도면에 걸쳐, 동일한 구성 요소에는 동일한 도면 부호가 할당되었다. 첨부된 도면에 도시된 구성은 본 발명을 설명하기 위해 예시적으로 구현된 실시예에 불과하며, 본 발명의 범위를 이에 한정하기 위한 것은 아니다. 특히, 첨부된 도면들은, 발명의 이해를 돕기 위해서, 일부 구성 요소를 다소 과장하여 표현하고 있다. 도면은 발명을 이해하기 위한 수단이므로, 도면에 표현된 구성 요소의 폭이나 두께 등은 실제 구현시 달라질 수 있음을 이해하여야 한다.
도 1은 본 발명의 실시예에 따른 3D 스캔이 가능한 이동 단말의 물리적인 구성부를 개략적으로 도시하고 있다.
도 2는 본 발명의 일 실시예에 따른 3D 스캔 방식을 예시적으로 도시한 흐름도이다.
도 3은 도 2의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이다.
도 4는 도 2의 3D 스캔 방식에 의한 왜곡 보상을 예시적으로 설명하기 위한 도면이다.
도 5는 도 2의 빅데이터 활용 방법을 예시적으로 설명하기 위한 도면이다.
도 6은 본 발명의 다른 실시예에 따른 피사체의 프로파일 정보를 생성하는 방식을 예시적으로 도시한 흐름도이다.
도 7은 도 6의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이다.
도 1은 본 발명의 실시예에 따른 3D 스캔이 가능한 이동 단말의 물리적인 구성부를 개략적으로 도시하고 있다.
도 2는 본 발명의 일 실시예에 따른 3D 스캔 방식을 예시적으로 도시한 흐름도이다.
도 3은 도 2의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이다.
도 4는 도 2의 3D 스캔 방식에 의한 왜곡 보상을 예시적으로 설명하기 위한 도면이다.
도 5는 도 2의 빅데이터 활용 방법을 예시적으로 설명하기 위한 도면이다.
도 6은 본 발명의 다른 실시예에 따른 피사체의 프로파일 정보를 생성하는 방식을 예시적으로 도시한 흐름도이다.
도 7은 도 6의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이다.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 이를 상세한 설명을 통해 상세히 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.
도 1은 본 발명의 실시예에 따른 3D 스캔이 가능한 이동 단말의 물리적인 구성부를 개략적으로 도시하고 있다.
도 1을 참조하면, 이동 단말(100)은, 예를 들어, 프로세서(110), 무선 트랜시버(120), 디스플레이(130), 디스플레이 컨트롤러(135), 메모리(170), 메모리 컨트롤러(175), 입출력 장치(160), 보조 통신 모듈(125), 카메라 모듈(140) 및 전원(150)을 포함할 수 있다. 참고로, 도 1에 도시된 이동 단말(100)의 구성부들은 하나의 예시일 뿐이며, 하나 이상의 구성부의 추가 또는 생략이 가능하다. 따라서, 본 발명에 따른 실시예들이 반드시 도 1에 도시된 구성부를 갖는 이동 단말(100)에서만 구현 가능한 것이 아님을 이해하여야 한다.
이동 단말(100)은 무선 트랜시버(120), 보조 통신 모듈(125) 및/또는 커넥터를 통해서 외부 장치와 통신한다. 외부 통신 장치는 통신망을 통해 통신 가능한 다른 이동 단말(100), 컴퓨터 또는 서버를 포함한다. 통신망은 인터넷이나 무선 LAN과 같은 유무선 네트워크뿐만이 아니라 둘 이상의 장치를 연결하는 USB와 같은 케이블이나 블루투스와 같은 근거리 통신망도 포함하는 것으로 해석되어야 한다.
프로세서(110)는 데이터 연산 기능을 구비한 프로세서(110)로서 이동 단말(100)의 작동을 전체적으로 제어한다. 상세하게, 프로세서(110)는 사용자의 입력 유무와 상관없이 이동 단말(100)이 기본 기능을 수행하도록 구성부를 제어하며, 사용자의 입력에 따른 명령을 수행하도록 구성부를 제어한다. 이를 위해서, 프로세서(110)는 탑재된 오퍼레이팅 시스템과 협력하여 어플리케이션 프로그램(이하 앱이라 칭함)을 실행한다. 여기서, 앱은 사용자에 의해 또는 외부 장치에 의해 선택적으로 실행되는 프로그램뿐 아니라 단말의 기본 기능을 수행하기 위해 사용자의 선택과 상관없이 실행되는 프로그램도 포함한다. 상세하게, 프로세서(110)는 무선 트랜시버(120) 및/또는 보조 통신 모듈(125) 등을 통해 전기 신호의 형태로 입력된 음성/음향/데이터를 처리한다. 처리된 음성/음향/데이터는 디스플레이(130) 또는 입출력 장치(160)를 통해 출력된다. 이동 단말(100)은 사용자가 선택할 수 있는 하나 이상의 앱을 표시하고 선택된 앱을 실행하여 사용자가 이용할 수 있도록 하는 유저 인터페이스를 디스플레이(130)에 표시한다. 유저 인터페이스를 통해서 사용자는 3D 스캔에 의한 신체 치수 측정을 선택하여 실행시키고 필요한 작업을 할 수 있다.
무선 트랜시버(120)는 프로세서(110)의 제어에 의해 안테나(미도시)를 통해 하나 이상의 통신 방식에 따라 무선 신호를 송신하거나 수신한다. 여기서, 무선 트랜시버(120)는 예를 들어 W-CDMA, LTE 등과 같은 이동통신표준에 따른 기지국 등과 통신할 수 있다. 무선 트랜시버(120)는 프로세서(110)로부터 출력된 전기 신호를 무선 신호로 변환하여 통신망을 통해 외부 장치로 전송하며, 통신망을 통해 수신한 무선 신호를 전기 신호로 변환하여 프로세서(110)에 입력한다. 무선 트랜시버(120)가 송수신하는 무선 신호는 예를 들어, 음성 통화, 데이터, 텍스트/멀티미디어 메시지 등일 수 있다.
보조 통신 모듈(125)은 프로세서(110)의 제어에 의해 하나 이상의 통신 방식에 따라 유선 또는 무선 신호를 송신하거나 수신한다. 보조 통신 모듈(125)은 다양한 유무선 통신 방식을 지원할 수 있는데, 예를 들어, 근거리 무선 통신 방식인 무선 랜 등과 단거리 무선 통신 방식인 블루투스(또는 BLE(Bluetooth Light Energy), 지그비, Wifi-Direct, NFC 등을 지원할 수 있을 뿐 아니라 유선 통신 방식인 LAN, USB 등도 지원할 수 있다. 한편, 보조 통신 모듈(125)는 이동 단말(100)의 현재 위치 정보를 획득하기 위해 GPS 신호를 수신하며, 수신한 GPS 신호를 처리하여 현재 위치 정보를 제공할 수 있다. 현재 위치 정보는, GPS 이외에도 다양한 공지의 방법, 예를 들어, 기지국/중계기의 위치에 따른 위치 추정, 비컨에 의한 실내 위치 측정 등에 의해 획득될 수도 있다.
이동 단말(100)은 디스플레이(130)와 디스플레이 컨트롤러(135)를 포함한다. 디스플레이(130)는 예를 들어, LCD, OLED 등으로 구현될 수 있다. 한편, 디스플레이(130)는 하나 이상일 수 있으며, 예를 들어 디스플레이(130)가 둘인 경우, 각 디스플레이(130)는 이동 단말(100)의 전면과 후면 등에 배치될 수 있다. 디스플레이 컨트롤러(135)는, 프로세서(110)의 제어에 의해, 프로세서(110)로부터 출력된 화면에 상응하는 전기 신호를 처리하여 디스플레이(130)에 출력되도록 디스플레이(130)를 제어한다. 한편, 디스플레이(130)는 사용자로부터 터치를 입력 받을 수 있는 터치 스크린일 수 있다. 이 경우, 터치 스크린은 입력 장치로 동작할 수 있다. 디스플레이(130)가 터치 스크린인 경우, 디스플레이 컨트롤러(135)는 디스플레이(130)상에 감지된 사용자의 터치에 상응하는 좌표를 생성할 수 있다. 생성된 좌표는 프로세서(110)에 입력된다. 여기서, 동시에 하나 이상의 지점에 대한 터치인 경우 좌표는 하나 이상일 수 있으며, 사용자가 드래그한 경우에는 좌표는 둘 이상일 수 있다.
카메라 모듈(140)은 프로세서(110)의 제어에 의해 정지 영상과 동영상 중 적어도 어느 하나를 촬영하는 하나 이상의 카메라를 포함한다. 카메라 모듈(140)이 촬영한 정지 영상 및/또는 동영상은 메모리(170)에 저장된다. 카메라가 둘 이상일 경우, 복수의 카메라 중 하나는 이동 단말(100)의 전면에 배치되며, 나머지는 이동 단말(100)의 후면에 배치될 수 있다.
전원(150)은 내장된 하나 또는 이상의 배터리를 포함하거나 이동 단말(100)의 외부에 위치한 상용 전원(150)일 수 있으며, 프로세서(110)의 제어에 의해 이동 단말(100)의 구성부에 전력을 공급한다. 한편, 상용 전원(150)을 통해 전력을 공급하는 경우, 이동 단말(100)은 커넥터를 통해서 외부에 위치한 상용 전원(150)에 연결될 수 있다.
입출력 장치(160)는 예를 들어 버튼, 마이크, 스피커, 진동 모터, 커넥터 등을 포함할 수 있다. 한편, 도 1에 도시된 입출력 장치(160)는 다양한 종류의 이동 단말(100)에 실질적으로 공통으로 구비되는 장치들을 예시적으로 도시한 것이며, 이외에도 다양한 입출력 장치(160)가 선택적으로 구비되거나 생략될 수 있음에 유의하여야 한다.
버튼은 이동 단말(100)의 외부 표면에 위치되며, 사용자가 이동 단말(100)의 기능을 선택 및/또는 실행하기 위한 명령을 입력하는데 이용된다. 버튼은, 예를 들어, 온/오프 버튼, 홈 버튼, 볼륨 버튼 등을 포함할 수 있다. 사용자가 임의의 버튼을 누르면, 버튼은 전기 신호를 프로세서(110)로 출력한다.
마이크는 음성이나 음향을 수신하여 이에 상응하는 전기 신호를 출력한다.
스피커는 입력된 전기 신호를 음성이나 음향으로 변환하여 출력한다. 스피커는 음성이나 음향은 외부 장치로부터 수신하거나 프로세서(110)로부터 수신한 전기 신호를 음성이나 음향으로 변환한다. 여기서, 프로세서(110)는 사용자가 이동 단말(100)의 특정 기능을 선택하거나 실행할 때 상응하는 음향을 스피커를 통해 출력할 수 있다. 예를 들어, 동영상을 재생하는 경우, 동영상에 포함된 음성 파일이 스피커를 통해 출력될 수 있다.
자이로 센서는 이동 단말(100)의 움직임을 감지한다. 자이로 센서는 각속도를 측정하여 이동 단말(100)이 회전하거나 상하좌우 중 어느 한 방향으로 이동하였는지를 감지할 수 있다.
커넥터는 이동 단말(100)과 외부 장치를 연결하는 인터페이스이다. 가장 단순한 예로, 커넥터는 이동 단말(100)을 외부 전원(150)에 연결하기 위한 전력 커넥터 또는 스피커에 연결하기 위한 스피커/이어폰 잭일 수 있다. 한편, 예를 들어 USB와 같은 직렬 고속 인터페이스의 경우, 커넥터에 연결된 케이블을 통해서 데이터와 전력이 동시에 이동 단말(100)에 공급될 수 있으며, 이동 단말(100)은 데이터를 외부 장치에 전송할 수 있다. 또한, 예를 들어 유선 LAN 커넥터의 경우, 커넥터에 연결된 케이블을 통해서, 이동 단말(100)은 인터넷에 연결된 외부 장치와 데이터를 송수신할 수 있다.
이동 단말(100)은 메모리 컨트롤러(175)와 메모리(170)를 포함한다. 메모리(170)는 휘발성 메모리(170)와 비휘발성 메모리(170)를 포함한다. 휘발성 메모리(170)는 예를 들어, RAM(Random Access Memory) 등이며, 비휘발성 메모리(170)는 예를 들어, ROM(Read Only Memory), Flash memory 등이다. 메모리(170)는 이동 단말(100)의 기본적인 기능 수행에 필요한 오퍼레이팅 시스템, 미들웨어, API 등과 프로세서(110)에 의해 수행되는 앱 등을 구성하는 하나 이상의 파일 등을 저장하며, 3D 스캔에 의한 신체 치수 측정시 필요한 데이터를 저장한다. 또한, 메모리(170)는 유저 인터페이스를 구성하는데 필요한 정보, 예를 들어, 신체 부위를 촬영하여 생성된 이미지, 3D 스캔에 의한 신체 치수 측정 방식의 속성, 처리 루틴 등도 저장한다. 메모리 컨트롤러(175)는 메모리(170)의 작동을 제어한다. 예를 들어, 메모리 컨트롤러(175)는 프로세서(110)가 출력한 데이터에 상응하는 전기 신호를 메모리(170)가 저장하도록 제어하며, 프로세서(110)가 요구한 데이터를 메모리(170)가 출력하도록 제어한다.
상술한 예시적인 구성을 갖는 이동 단말(100)은 이하에서 본 발명의 실시예에 따른 3D 스캔에 의한 신체 치수 측정 방식을 설명할 때 함께 참조하여 설명된다. 도 1에 도시된 물리적인 구성부를 명시적으로 인용하지 않더라도, 본 발명의 실시예에 따른 3D 스캔에 의한 신체 치수 측정 방식이 물리적인 구성 없이 단순한 데이터 처리에 의해서만 구현되고 실행되는 것으로 해석되어서는 안 된다.
도 2는 본 발명의 일 실시예에 따른 3D 스캔 방식을 예시적으로 도시한 흐름도이고, 도 3은 도 2의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이고, 도 4는 도 2의 3D 스캔 방식에 의한 왜곡 보상을 예시적으로 설명하기 위한 도면이며, 도 5는 도 2의 빅데이터 활용 방법을 예시적으로 설명하기 위한 도면이다.
사용자가 이동 단말(100)에서 3D 스캔 앱을 선택하면, 프로세서(110)는 메모리에 저장된 3D 스캔 앱을 실행한다. 앱이 구동되면, 사용자는 3D 스캔에 의해 신체 치수를 측정할 피사체 유형을 선택한다(200). 피사체는, 예를 들어, 손, 발, 상체, 다리 등과 같은 신체 부위이나 이에 한정되지 않는다.
선택된 피사체 유형에 연관된 표준 3D 데이터가 선택된다(210). 표준 3D 데이터는, 다수의 모집단을 대상으로 특정 신체 부위에 대한 분절 정보를 포함한다. 선택된 피사체 유형이 손인 경우, 표준 3D 데이터는, 예를 들어, 엄지 또는 중지의 마디 수, 마디 순서, 마디간 평균 길이, 손가락의 평균 길이, 평균 폭, 평균 두께 등을 등을 포함할 수 있다. 표준 3D 데이터는 신체 부위별로 생성되며, 앱의 설치시에 메모리(170)에 저장되거나, 앱의 구동시에 통신망을 통해 다운로드되어 메모리(170)에 저장된다.
이동 단말(100)의 프로세서(110)는 카메라(140)를 구동하여 피사체의 적어도 2면, 즉, 제1 면 및 제2면을 스캐닝한다(220). 여기서, 도 3을 참조하면, 사용자는 카메라(140)가 피사체인 손을 향하도록 하면서 이동 단말(100)을 피사체 주변으로 회전시키거나 상하로 이동시킨다. 도 3의 (a)는 손(300)을 스캐닝하여 손(300)까지의 거리를 산출하며, (b)는 손(300)의 길이를 산출 과정을 예시하고 있다. 피사체인 손(300)을 고정한 상태에서 이동 단말(100)을 손(300)을 중심으로 회전하면, 카메라(140)에 의해 촬영된 영상이 달라지게 된다.
도 3의 (a)를 참조하면, 카메라(140)가 손(300)의 정면을 향하는 상태(310)에서 촬영한 영상이 이동 단말(100)의 디스플레이(130)에 표시된다. 이동 단말(100)을 반시계 방향으로 회전(320)시키면, 손이 시계 방향으로 회전한 효과가 발생한다. 같은 방식으로, 이동 단말을 시계 방향으로 회전(330)시키면, 손이 반시계 방향으로 회전한 효과가 발생한다. 한편, 이동 단말(100)을 고정한 상태에서 손을 시계 방향 또는 반시계 방향으로 회전시킬 수도 있으나, 이 경우, 회전각을 산출하기 위해서는 매우 복잡한 연산이 필요하다. 그러나, 손(300)을 고정한 상태에서 이동 단말(100)을 회전시키면, 자이로 센서에 의해 회전각을 얻을 수 있다.
한편, 손(300)의 정면을 향하는 상태(310)에서 촬영한 영상을 이동 단말(100)을 반시계 방향으로 회전(320)시키면서 촬영한 영상과 비교하면, 반시계 방향으로 회전(320)하면 손(300)의 우측 영역의 변화보다 좌측 영역의 변화가 더 많이 발생한다. 반대로, 이동 단말(100)을 시계 방향으로 회전(330)시키면 손(300)의 좌측 영역보다 우측 영역의 변화가 더 많이 발생한다.
스캐닝 과정 중 또는 스캐닝 후 피사체까지의 거리가 산출된다(230). 자이로 센서에 의해 회전각을 얻을 수 있기 때문에, 손(300) 상의 특징점들의 위치 변화와 회전각을 이용하면 피사체까지의 거리 및/또는 피사체에 관련된 수치, 예를 들어, 길이를 삼각측량법 등에 의해 산출할 수 있게 된다. 한편, 카메라(140)가 손의 정면을 향하도록 하면서 이동 단말(100)을 상하로 이동시켜도 동일한 방식이 적용될 수 있다. 동일한 방식으로 손의 측면(340)을 촬영하면, 손의 측면(340) 상의 특징점들의 위치 변화와 회전각을 이용하면 피사체까지의 거리 및/또는 피사체에 관련된 수치, 예를 들어, 길이를 삼각측량법 등에 의해 산출할 수 있게 된다.
상세하게, 이동 단말(100)과 피사체 사이의 거리 D는, 이동 단말(100)의 가속 센서 및 자이로 센서를 이용하여 산출될 수 있다. 예를 들어, 이동 단말(100)의 이동 거리 d는, 이동 단말(100)의 가속 센서가 측정 시작 시간부터 측정 완료 시간까지 가속도를 측정하여 산출될 수 있다.
여기서, a는 측정 시작 시간부터 측정 완료 시간 사이에 측정된 이동 단말(100)의 가속도이며, d는 이동 단말(100)의 이동 거리이다.

여기서, D는 이동 단말(100)과 피사체 사이 거리이고, θro는 이동 단말(100)의 측정 시작 시간부터 측정 완료 시간 사이의 각도 변화량, 즉, 회전각이다. 회전각 θro는 이동 단말(100)의 자이로 센서로부터 획득될 수 있다.
여기서, b는 배경 길이이며, θf는 이동 단말(100)의 카메라의 시야각이다.
여기서, t는 이동 단말(100)의 디스플레이에 표시된 피사체의 길이이다.
이동 단말(100)을 회전시키면서 피사체의 정면(예를 들어, 손등)과 측면(예를 들어, 손의 측면)을 스캔함으로써, 피사체의 길이 및 두께를 포함하는 수치 정보가 산출된다. 예를 들어, 피사체가 손인 경우, 표준 3D 데이터를 참조하여, 손가락 및/또는 마디를 구분하며, 손가락의 길이 및/또는 마디간 길이가 산출된다.
한편, 자이로 센서를 이용하여 이동 단말(100)과 지면(또는 피사체가 놓인 평면)간 수평 각도 θx 및/또는 수직 각도 θy를 산출하고, 이를 이용하여 스캔한 영상의 왜곡을 보상한다(240). 단계 230에서 손(300)을 중심으로 이동 단말(100)을 회전시킬 때, 이동 단말(100)이 지면에 대해 실질적으로 수평하게 유지되는 것이 바람직하다. 하지만 실제로는 이동 단말(100)이 기울어질 수 있으며, 이 경우 산출된 수치에 오차가 발생할 수 있다. 따라서 이동 단말(100)이 지면에 대해 수직 및/또는 수평 방향으로 기울어진 각도를 이용하여 스캔한 영상을 보정할 수 있다. 단계 220 내지 240은 동시에 실행될 수 있다.
상세하게, 도 4를 참조하면, 이동 단말(100)의 자이로 센서는, 이동 단말(100)의 수평 각도 θx 및/또는 수평 각도 θy를 측정할 수 있다. 디스플레이(135)에 표시된 피사체 영상(136)은, 수평 각도 θx 및/또는 수직 각도 θy로 인해, 실질적으로 수평하게 촬영되었을 경우보다 짧다. 따라서, 표시된 피사체의 길이는, 수학식 5에 의해 보정된 영상으로부터 산출될 수 있다.
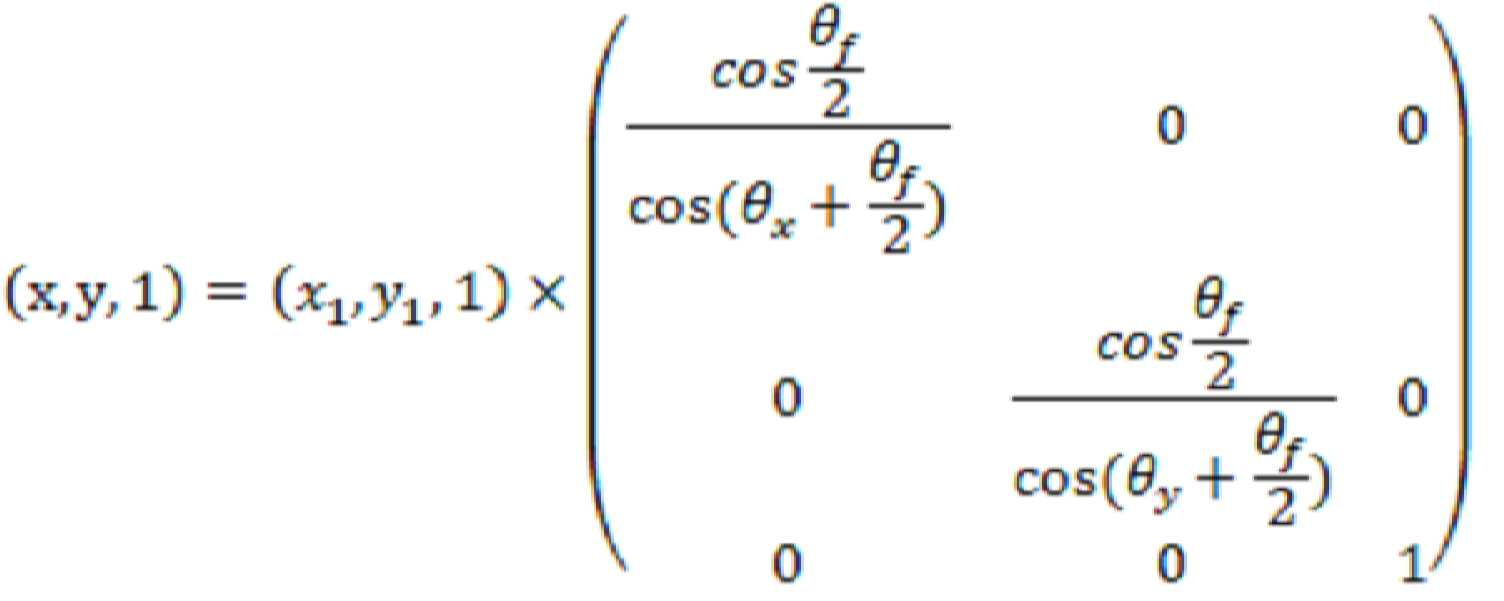
여기서, (x, y, 1)은 보정된 영상의 좌표이며, (x1, y1, 1)는 표시된 영상의 좌표이다.
3D 빅데이터 기반으로 피사체의 고유 3D 데이터를 확보한다(250). 여기서, 3D 빅데이터는, 피사체 유형에 따른 분절 정보, 분절 길이 정보, 분절 3D 좌표 정보, 분절 길이에 따른 좌표 변환 정보, 회전각과 거리(또는 피사체 길이)의 상관 관계, 스캐닝된 영상의 왜곡량 등을 포함한다. 고유 3D 데이터는, 특정 신체 부위의 3차원 형상을 특정할 수 있는 정보, 예를 들어, 길이, 두께, 폭을 표현하는 3차원 좌표일 수 있다. 3D 빅데이터를 이용하면, 측정하지 않은 분절, 또는 스캐닝되지 않은 제3 면에 대한 수치 정보를 획득할 수 있으며, 이를 바탕으로, 특정 신체 부위의 고유 3D 데이터를 확보할 수 있다.
상세하게, 도 5를 참조하면, 단계 220 내지 240을 통해 측정된 하나 이상의 분절에 대한 길이 정보 중 적어도 하나를 이용하여, 이에 매칭되는 3D 빅데이터를 검색한다(251). 예를 들어, 손을 스캔하는 경우, 표준 3D 데이터를 참조하면, 5개의 손가락 및 손가락의 마디간 길이가 측정된다. 이 때, 마디간 길이는 표준 3D 데이터에 포함되어 있지만, 손등의 길이 또는 손가락의 두께 등은 표준 3D 데이터에 포함되어 있지 않을 수 있다.
검색된 3D 빅데이터에 기초하여, 측정되지 않은 분절이 확정되며(252), 확정된 분절에 대한 수치 정보가 검색된 3D 빅데이터로부터 획득된다(253). 획득된 수치 정보는, 측정된 하나 이상의 분절에 대한 길이 정보와 결합되어 고유 3D 데이터로 가공된다.
도 6은 본 발명의 다른 실시예에 따른 피사체의 프로파일 정보를 생성하는 방식을 예시적으로 도시한 흐름도이고, 도 7은 도 6의 3D 스캔 방식을 예시적으로 설명하기 위한 도면이다.
사용자가 이동 단말(100)에서 3D 스캔 앱을 선택하면, 프로세서(110)는 메모리에 저장된 3D 스캔 앱을 실행한다. 앱이 구동되면, 사용자는 3D 스캔에 의해 신체 치수를 측정할 피사체 유형을 선택한다(400).
선택된 피사체 유형에 연관된 대표 사이즈가 선택된다(410). 대표 사이즈는, 피사체 유형별로 표준화된 치수로서, 예를 들어, 골프 장갑의 경우, 손목의 첫 번째 주름부터 중지 끝까지의 길이를 기준으로 호수가 부여된다. 따라서 자신이 착용하던 골프 장갑의 호수를 선택하면 손에 대한 대략적인 수치가 결정될 수 있다. 대표 사이즈 및 이에 연관된 수치는 앱의 설치시에 메모리(170)에 저장되거나, 앱의 구동시에 통신망을 통해 다운로드되어 메모리(170)에 저장된다.
이동 단말(100)의 프로세서(110)는 선택된 피사체 및 대표 사이즈에 연관된 수치를 이용하여 피사체 프레임을 생성하고, 이를 디스플레이(130)에 표시한다(420). 피사체 프레임은, 피사체의 대표적인 형태 또는 대표 사이즈를 결정하는 측정 대상(골프 장갑의 경우, 손목의 첫 번째 주름부터 중지 끝까지의 길이)를 표현하는 이미지이다.
이동 단말(100)의 프로세서(110)는 카메라(140)를 구동하여 촬영한 피사체 영상을 디스플레이(130)에 표시하며, 동시에 선택된 피사체 및 대표 사이즈에 연관된 수치를 이용하여 피사체 프레임도 디스플레이(130)에 표시한다(420).
사용자는 카메라(140)가 피사체인 손을 향하도록 하면서 이동 단말(100)과 피사체간의 거리를 변경하여, 손과 피사체 프레임이 일치되도록 한다. 프로세서(110)는 손과 피사체 프레임이 일치되면 영상을 저장한다(430).
도 7은 손(500)을 촬영하는 과정을 예시하고 있다. 피사체인 손(500)을 고정한 상태에서 이동 단말(100)과 손(500)의 거리가 변경된다. 이동 단말(100)과 손(500)간의 거리가 가장 먼 상태(510)에서, 디스플레이(130)에 표시된 손 영상(530)과 피사체 프레임(520)이 일치하는 영역이 가장 작다. 이동 단말(100)이 손(500)에 가까워지면(540), 손 영상(550)과 피사체 프레임(520)이 일치하는 영역이 증가하며, 최적 거리가 되면(560), 손 영상과 피사체 프레임이 일치(570)하게 된다.
프로세서(110)는 저장된 영상을 대표 사이즈에 연관된 수치와 비교하여 피사체에 연관된 수치를 산출한다(440). 상술한 바와 같이, 대표 사이즈에 연관된 수치는 피사체의 적어도 하나 이상의 부위에 대한 평균적인 수치 정보이다. 또한, 저장된 영상은 피사체 프레임과 일치할 때에 촬영되었으므로, 그 자체에 수치 정보가 이미 반영되어 있다. 즉, 예를 들어, 저장된 영상에서, 손목의 첫 번째 주름부터 중지 끝까지의 길이는 이미 정해져 있으므로, 나머지 손가락의 길이는 이것과 비교함으로써 길이를 산출할 수 있게 된다.
한편, 자이로 센서를 이용하여 이동 단말(100)과 지면(또는 피사체가 놓인 평면)간 수직 각도 및/또는 수평 각도를 산출하고, 이를 이용하여 스캔한 영상의 왜곡을 보상한다(450). 단계 430에서 손(500)을 향해 이동 단말(100)을 이동시킬 때, 이동 단말(100)이 피사체가 배치된 평면에 대해 실질적으로 수평 또는 수직하게 유지되는 것이 바람직하다. 하지만 실제로는 이동 단말(100)이 기울어질 수 있으며, 이 경우 산출된 수치에 오차가 발생할 수 있다. 따라서 이동 단말(100)이 평면에 대해 수직 및/또는 수평 방향으로 기울어진 각도를 이용하여 스캔한 영상을 보정할 수 있다. 단계 440과 450은 동시에 실행될 수 있다.
빅데이터 기반으로 피사체의 프로파일 정보를 확보한다(460). 여기서, 빅데이터는, 피사체 유형에 따른 분절 정보, 스캐닝된 영상의 왜곡량 등을 포함한다. 빅데이터를 이용하여, 피사체의 프로파일 정보를 완성할 수 있다.
전술한 본 발명의 설명은 예시를 위한 것이며, 본 발명이 속하는 기술분야의 통상의 지식을 가진 자는 본 발명의 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 쉽게 변형이 가능하다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시 예들은 모든 면에서 예시적인 것이며 한정적이 아닌 것으로 이해해야만 한다.
본 발명의 범위는 상기 상세한 설명보다는 후술하는 특허청구범위에 의하여 나타나며, 특허청구범위의 의미 및 범위 그리고 그 균등 개념으로부터 도출되는 모든 변경 또는 변형된 형태가 본 발명의 범위에 포함되는 것으로 해석되어야 한다.
Claims (5)
- 이동 단말에 있어서,
시야각 내에 위치한 신체를 촬영하는 카메라;
상기 이동 단말의 가속도를 검출하는 가속도 센서;
상기 이동 단말의 회전각을 검출하는 자이로 센서; 및
상기 검출된 가속도 및 상기 회전각을 참조하여, 상기 카메라가 촬영한 상기 신체의 영상으로부터 상기 신체의 고유 3D 데이터를 산출하는 프로세서를 포함하되,
상기 프로세서는,
선택된 신체 유형에 연관된 표준 3D 데이터를 선택하고,
상기 카메라를 구동하여 상기 신체의 적어도 두 면을 스캐닝하되, 상기 카메라는 상기 신체를 향하도록 유지되면서 상기 피사체 주변을 회전하고,
상기 회전각 및 상기 카메라와 지면간 수평 및 수직 각도를 이용하여 상기 카메라가 촬영한 영상의 왜곡을 보정하며,
상기 표준 3D 데이터를 참조하여, 보정된 영상을 이용하여 상기 선택된 신체 유형에 따른 고유 3D 데이터를 산출하는, 이동 단말. - 청구항 1에 있어서, 상기 신체는 손이며,
상기 프로세서는,
상기 손의 측정되지 않은 분절의 수치 정보를 3D 빅데이터로부터 획득하는 이동 단말. - 청구항 1에 있어서, 상기 프로세서는,
상기 가속도 및 상기 회전각을 이용하여 상기 이동 단말과 상기 신체간 거리를 산출하며,
상기 거리 및 상기 시야각을 이용하여 상기 신체의 길이를 측정하는 이동 단말. - 청구항 1에 있어서, 상기 자이로 센서는, 상기 이동 단말의 수평 각도 및 수직 각도를 측정하며,
상기 프로세서는, 측정된 수평 각도 및 수직 각도를 이용하여 상기 영상 왜곡을 보정하는 이동 단말. - 선택된 피사체 유형에 연관된 대표 사이즈를 제공하고,
상기 피사체 유형에 따른 피사체의 대표적인 형태 또는 상기 대표 사이즈를 결정하는 측정 대상을 표현하는 피사체 프레임을 생성하고,
상기 피사체 프레임과 상기 피사체를 촬영하여 생성한 영상을 중첩하여 표시하고,
상기 피사체 프레임과 상기 영상이 일치되면 상기 영상을 저장하며,
저장된 영상에서 상기 피사체의 수치를 측정하는 이동 단말.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20170079751 | 2017-06-23 | ||
| KR1020170079751 | 2017-06-23 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20190000825A true KR20190000825A (ko) | 2019-01-03 |
| KR102129954B1 KR102129954B1 (ko) | 2020-07-03 |
Family
ID=65021883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180071827A KR102129954B1 (ko) | 2017-06-23 | 2018-06-22 | 3d 스캔이 가능한 이동 단말 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102129954B1 (ko) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102202843B1 (ko) * | 2020-04-14 | 2021-01-14 | 이상철 | 3차원 아바타를 이용한 온라인 의류 시착 서비스 제공 시스템 |
| KR20220073107A (ko) * | 2020-11-26 | 2022-06-03 | 주식회사 지원파트너스 | 피부 촬영 사진을 이용한 피부 유형 분석 시스템 및 그 방법 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016036597A (ja) * | 2014-08-08 | 2016-03-22 | ソフトバンク株式会社 | 3dモデリング情報作成支援システム、3dモデリング情報作成支援方法、及び3dモデリング情報作成支援プログラム |
-
2018
- 2018-06-22 KR KR1020180071827A patent/KR102129954B1/ko active IP Right Grant
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016036597A (ja) * | 2014-08-08 | 2016-03-22 | ソフトバンク株式会社 | 3dモデリング情報作成支援システム、3dモデリング情報作成支援方法、及び3dモデリング情報作成支援プログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102202843B1 (ko) * | 2020-04-14 | 2021-01-14 | 이상철 | 3차원 아바타를 이용한 온라인 의류 시착 서비스 제공 시스템 |
| KR20220073107A (ko) * | 2020-11-26 | 2022-06-03 | 주식회사 지원파트너스 | 피부 촬영 사진을 이용한 피부 유형 분석 시스템 및 그 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102129954B1 (ko) | 2020-07-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7127149B2 (ja) | 画像補正方法、画像補正装置、および電子機器 | |
| CN107113415B (zh) | 用于多技术深度图获取和融合的方法和设备 | |
| US9460517B2 (en) | Photogrammetric methods and devices related thereto | |
| KR102106296B1 (ko) | 카메라를 포함하는 전자 장치 및 그것의 동작 방법 | |
| US9900500B2 (en) | Method and apparatus for auto-focusing of an photographing device | |
| CN108459597B (zh) | 一种用于处理任务区域的任务的移动电子设备以及方法 | |
| US11847789B2 (en) | Distance measurement method and electronic device | |
| US20150356739A1 (en) | Image assessment device, capturing device, 3d measuring device, image assessment method, and non-transitory computer-readable medium | |
| CN101086604A (zh) | 成像设备、成像设备的控制方法以及计算机程序 | |
| CN105627920A (zh) | 尺寸显示方法和装置 | |
| JP7150980B2 (ja) | 光ラベルに基づく情報デバイスインタラクション方法及びシステム | |
| KR102129954B1 (ko) | 3d 스캔이 가능한 이동 단말 | |
| CN106291519A (zh) | 测距方法及装置 | |
| CN104282041A (zh) | 三维建模方法及装置 | |
| KR102439502B1 (ko) | 전자 장치 및 그의 영상 처리 방법 | |
| US11252387B2 (en) | Projection apparatus, projection method and storage medium | |
| US20170191827A1 (en) | Measuring system and operating method thereof | |
| US20200023523A1 (en) | Robot control system, robot apparatus, and non-transitory computer readable medium | |
| JP2016048239A (ja) | 物体の3d座標を測定するための方法および装置 | |
| CN113191976B (zh) | 图像拍摄方法、装置、终端及存储介质 | |
| EP2957397B1 (en) | Measurement system, object pickup system, measurement method, and carrier means | |
| CN109643455A (zh) | 摄像头标定方法和终端 | |
| KR20170083328A (ko) | 모바일 디바이스 및 모바일 디바이스의 제어방법 | |
| KR20200117460A (ko) | 전자 장치 및 그의 발열 제어 방법 | |
| EP2960622B1 (en) | A method for estimating a distance from a first communication device to a second communication device, and corresponding communication devices, server and system. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |