KR20180103903A - 관성 측정 유닛 캘리브레이션(imu calibration) - Google Patents
관성 측정 유닛 캘리브레이션(imu calibration) Download PDFInfo
- Publication number
- KR20180103903A KR20180103903A KR1020187020445A KR20187020445A KR20180103903A KR 20180103903 A KR20180103903 A KR 20180103903A KR 1020187020445 A KR1020187020445 A KR 1020187020445A KR 20187020445 A KR20187020445 A KR 20187020445A KR 20180103903 A KR20180103903 A KR 20180103903A
- Authority
- KR
- South Korea
- Prior art keywords
- imu
- bone
- model
- magnetometers
- patient
- Prior art date
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C17/00—Compasses; Devices for ascertaining true or magnetic north for navigation or surveying purposes
- G01C17/38—Testing, calibrating, or compensating of compasses
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/185—Compensation of inertial measurements, e.g. for temperature effects for gravity
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P21/00—Testing or calibrating of apparatus or devices covered by the preceding groups
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R35/00—Testing or calibrating of apparatus covered by the other groups of this subclass
- G01R35/005—Calibrating; Standards or reference devices, e.g. voltage or resistance standards, "golden" references
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00725—Calibration or performance testing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/102—Modelling of surgical devices, implants or prosthesis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/101—Computer-aided simulation of surgical operations
- A61B2034/105—Modelling of the patient, e.g. for ligaments or bones
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/10—Computer-aided planning, simulation or modelling of surgical operations
- A61B2034/108—Computer aided selection or customisation of medical implants or cutting guides
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2048—Tracking techniques using an accelerometer or inertia sensor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0223—Operational features of calibration, e.g. protocols for calibrating sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/02—Details of sensors specially adapted for in-vivo measurements
- A61B2562/0219—Inertial sensors, e.g. accelerometers, gyroscopes, tilt switches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; determining position of probes within or on the body of the patient
- A61B5/065—Determining position of the probe employing exclusively positioning means located on or in the probe, e.g. using position sensors arranged on the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7235—Details of waveform analysis
- A61B5/7242—Details of waveform analysis using integration
Abstract
관성 측정 유닛을 캘리브레이션하는 방법이 개시된다. 본 방법은 정지 상태의 상기 관성 측정 유닛으로부터 데이터를 수집하는 제 1 단계와; 상기 관성 측정 유닛의 세 직교축을 중심으로 상기 관성 측정 유닛을 재위치시키면서 상기 관성 측정 유닛으로부터 데이터를 수집하는 제 2 단계와; 상기 제 1 단계 및 상기 제 2 단계에서 수집된 상기 데이터를 사용하여 복수의 자이로스코프를 캘리브레이션하는 단계와; 상기 제 1 단계 및 상기 제 2 단계에서 수집된 상기 데이터를 사용하여 복수의 자력계를 캘리브레이션하는 단계와; 상기 제 1 단계 및 상기 제 2 단계에서 수집된 상기 데이터를 사용하여 복수의 가속도계를 캘리브레이션하는 단계를 포함하되, 상기 복수의 자력계를 캘리브레이션하는 단계는 왜곡 검출용 파라미터를 추출하고 상기 추출된 파라미터를 사용하여 자기 왜곡이 상기 관성 측정 유닛의 국소장 내에 존재하는지 여부를 결정하는 단계를 포함한다.
Description
관련출원 상호참조
본 출원은 "IMU CALIBRATION(IMU 캘리브레이션)"이라는 제목으로 2015년 12월 16일자로 출원된 미국 가특허 출원 제62/268,175호의 우선권을 주장하며, 그 개시 내용은 본 명세서에 참조로서 포함된다.
본 발명은 관성 측정 유닛(IMU)을 캘리브레이션하는 방법 및 기술에 관한 것으로, 보다 상세하게는 IMU가 작동하는 국소 환경을 처리하기 위해 IMU를 캘리브레이션하는 방법 및 기술에 관한 것이다.
2014년 12월 9일자로 출원된 특허 협력 조약 출원 PCT/US14/69411이 본 명세서에 참조로 포함되어 있고 부록 A로 첨부되어 있다.
관성 측정 유닛(IMU)을 사용하는 상업용 기술의 공통적인 문제는 움직임 이상 또는 자기 이상의 발생시 수집되는 데이터의 정밀성이다. 이런 문제는 IMU가 신체의 움직임 및 그 각도 배향을 추적하는 데 사용되어 센티미터 또는 밀리미터 단위의 신체 위치 변화가 IMU의 전반적인 유용성에 영향을 미치지 않는 분야에서는 중요하지 않다. 각도 위치가 수 도 가량 변화하지만 IMU가 이런 변화를 반영하지 않는 분야에서도 마찬가지이다. 그러나 정밀성이 요구되는 다른 분야에서는 사정이 다르다. 이런 정밀 분야에서는, 사용 영역 내에서 발생할 수 있는 움직임 이상 및 자기 이상을 처리할 수 있는 만족할 만한 해법을 찾아내지 못한 관계로 IMU를 활용하지 못했다. 또한, IMU와 관련된 대부분의 종래 기술 특허는 이런 이상을 다루기 위한 해법을 제시하는 것은 고사하고 이에 대한 암시조차 하지 않는다. 기존 IMU의 가장 큰 문제점 중 하나는 IMU에 근접한 강자성 물체에서 비롯되는 자기 이상을 제하거나 처리하는 데이터를 생성할 수 없다는 데서 비롯된다. 이에 따라, 강자성 물체가 IMU에 근접하여 존재할 경우, 누적되는 위치 어긋남이 발생하여 정밀성과는 거리가 먼 데이터가 만들어진다.
정밀성이 무엇보다 중요한 IMU의 사용 영역 내에서 발생할 수 있는 움직임 이상 및 자기 이상을 처리할 수 있는 해법이 부재한 현실에 응답하여, 본 발명자는 이들 이상을 처리하여 IMU에 의한 정밀한 측정을 가능하게 하는 방법 및 그에 따른 IMU를 개발하였다. 이에 따라, 본 발명자는 이전에는 IMU의 적용이 불가능했던 분야에서 실제 IMU를 활용할 수 있도록 하였다. 특히, 본 발명자는 IMU가 사용되는 국소장 외부 및 내부에서 IMU를 캘리브레이션하는 것 이외에도, IMU 구조 자체의 잠재적 정렬 불량을 감안하는 IMU용 캘리브레이션 시퀀스를 개발하였다. 이에 따라, 본 발명자는 움직임 이상 및 자기 이상을 처리하여 위치, 배향 및 자성(magnetism)의 변화를 나타내는 정밀한 측정을 제공할 수 있는 IMU를 개발하였다.
도 1은 관성 측정 유닛에 장착되고 X-축을 중심으로 회전되는 강자성 장치의 도해이다.
도 2는 도 1에 도시된 관성 측정 유닛에 장착되는 강자성 장치로서 Y-축을 중심으로 회전되는 강자성 장치의 도해이다.
도 3은 도 1에 도시된 관성 측정 유닛에 장착되는 강자성 장치로서 Z-축을 중심으로 회전되는 강자성 장치의 도해이다.
도 2는 도 1에 도시된 관성 측정 유닛에 장착되는 강자성 장치로서 Y-축을 중심으로 회전되는 강자성 장치의 도해이다.
도 3은 도 1에 도시된 관성 측정 유닛에 장착되는 강자성 장치로서 Z-축을 중심으로 회전되는 강자성 장치의 도해이다.
이하, 본 발명에 따른 관성 측정 유닛 및 이의 캘리브레션 방법의 예시적인 실시예를 설명한다. 물론, 후술되는 실시예는 사실상 예시적인 것으로 본 발명의 범위 및 요지로부터 벗어남 없이 변경 가능함은 당업자에게 명백하다. 그러나, 명백함 및 정확함을 위하여, 후술하는 예시적인 실시예는 본 발명의 범위에 속하는 데 필요 없는 것으로 인정되는 선택적인 단계, 방법, 및 특징을 포함할 수 있다.
다수의 기존 장치는 통합 센서 구성요소를 사용하여 해당 장치의 사용, 위치 및 상태와 관련된 정보를 포착하고 추적한다. 이런 시스템 중 하나인 관성 측정 유닛(IMU)은 물체의 움직임을 추적하는 데 사용된다. IMU의 일반적인 패키징은 가속도계, 자이로스코프 및 자력계의 조합이 될 수 있는 복수의 관성 센서로 구성되는 단일 집적 회로(IC)를 포함한다. 이들 세 가지 센서 유형은 동일한 회로기판 상에 설치되는 개개의 IC에 분리 배치될 수도 있다. 이 두 가지 경우(단일 IC 및 다중 IC)는 본 발명의 목적상 동일한 것으로 간주될 수 있다.
이런 IMU의 모든 센서에 대하여, 국소 환경에서 적절한 참조 및 작동을 보장하기 위해 캘리브레이션 단계가 수행될 수 있다. 예컨대, 가속도계는 중력 방향에 대한 기준을 결정하도록 캘리브레션될 수 있고, 자이로스코프는 소정의 공지된 회전 속도로 캘리브레이션될 수 있다. 자력계의 캘리브레이션은 해당 과정이 다수의 자력계 배향에서 국소 자기장의 세기 및 방향에 대한 지식을 필요로 하기 때문에 보다 복잡하다. 국소 환경의 캘리브레이션은 손으로 또는 기계로 수행될 수 있다. 국소 환경의 캘리브레이션을 위해서는 최소한 IMU의 세 개의 직교 축을 중심으로 한 IMU의 동작과 정지 기간을 고려해야 한다.
신뢰성이 높고 재현 가능한 IMU의 캘리브레이션을 요구하는 용례의 경우에는, 캘리브리에션 머신을 사용할 수 있다. 캘리브리에션 머신은 IMU에 추가적인 자기 왜곡을 일으키지 않도록 구성될 수 있다. 캘리브리에션 머신은 IMU의 모든 센서의 캘리브레이션을 위한 움직임은 물론 알고리즘을 사용하여 캘리브레이션 품질을 검사하기 위한 움직임을 가져야 한다.
이하, IMU의 캘리브레이션되지 않은 가속도계, 자이로스코프 및 자력계의 측정을 캘리브레이션하는 과정을 설명한다. 본 예시적인 과정은 동일한 회로기판 상에 설치된 단일 IMU 또는 다중 IMU에 적용될 수 있는 바, 모든 센서(캘리브레이션되지 않은 가속도계, 자이로스코프 및 자력계)가 동시에 캘리브레이션될 수 있다.
예시적인 실시형태에서, 캘리브레이션 절차는 적절한 데이터에 의한 캘리브레이션값의 계산 및 검증을 가능하게 하는 하기의 루틴을 포함할 수 있다. 본 예시적인 캘리브레이션 과정은 (1) 자이로스코프 캘리브레이션, (2) 자력계 캘리브레이션 루틴, (3) 가속도계 캘리브레이션 루틴, (4) 캘리브레이션 점검/검증 루틴을 포함하는 네 개의 단계를 포함하나, 이에 제한되지 않는다.
각각의 IMU의 자이로스코프의 캘리브레이션은 자이로스코프가 소정의 시간 동안 정지 상태가 되도록 하여야 한다. 자이로스코프 캘리브레이션의 일환으로, 본 과정은 하기 식 1에 제시된 바와 같이 산술평균에 의해 자이로스코프의 바이어스를 측정하는 것이다:
각각의 IMU의 자력계의 캘리브레이션은 IMU를 그 모든 직교축을 중심으로 회전시키는 것을 포함하여야 한다. 이런 식으로, 자력계 캘리브레이션 과정에서는, 먼저 하기 식 2에 제시된 다차원 타원체 피팅 함수(EF _fun)를 사용하여 약성 및 강성 왜곡을 측정한다:
(식 2에서, SFe orig 는 타원체의 구체로의 변환이고, HFe orig 는 센서 및 국소 바이어스이다).
이어서, 식 2로부터 얻은 결과 데이터는 하기 식 3을 사용하여 처리된다:

그 후, 자력계 사이의 정렬 차이가 캘리브레이션된다. 그럼으로써, 식 4를 사용하여 모든 자력계가 기준 정렬선에 맞추어 정렬된다는 가정 하에 식 4를 활용할 수 있다. 대안으로서, 필요에 따라, 자력계는 상이한 기준 정렬선에 맞추어 정렬될 수 있다. 식 4에서, TMAG ij 는 자력계 "j"의 기준 자력계 "i"로의 정렬 변환을 나타낸다.
각각의 IMU의 가속도계의 캘리브레이션은 IMU를 중력에 수직한 두 축을 중심으로 회전시키는 것을 포함하여야 한다. 이런 식으로, 가속도계의 캘리브레이션값이 하기 식 5에 제시된 다차원 타원체 피팅 함수(EF _fun)를 이용하여 계산된다.

캘리브레이션 점검 루틴은 IMU를 중력과 동일선상의 축을 중심으로 회전시키는 것을 포함하여야 한다. 점검 루틴의 동작이 중력에 대해 상이한 각도로 다수 회에 걸쳐 수행되는 경우 최선의 결과를 얻을 수 있다.
센서를 캘리브리레이션한 후에, 제조 및 IC 조립 배치 오차를 추출하거나 처리하기 위해 이들 오차를 고려할 수 있다. 이런 식으로, 본 발명은 (캘리브레이션 파라미터를 적용하는) 센서들 사이의 오정렬을 고려하는 캘리브레이션 시퀀스를 포함하는데, 이런 오정렬은 하기 식 6 내지 10에 따라 캘리브레이션된다. 그럼으로써, 캘리브레이션 중에 수집된 모든 센서 데이터가 이들 캘리브레이션 식/파라미터의 적용 대상이 될 수 있다.

다수의 IMU가 견고히 서로 고정되어 있는 상태에서는, 잡음 또는 (센서 기준) 등방성 잡음이 없을 경우, 정렬되고 캘리브레이션된 신호는 각각의 센서 유형 간에 대체로 동일하여야 한다.
국소 환경에 대한 캘리브레이션에도 불구하고, 자력계는 특히 일시적인 국소 교란이 발생하기 쉽다. 구체적으로, (전술한) 초기 캘리브레이션 이후 추가적인 강자성원의 도입 또는 강자성원의 이동으로 인해 센서 신호가 왜곡되어 부정확한 판독이 초래될 수 있다. 왜곡 상태는 강성 왜곡(hard iron distortion)과 약성 왜곡(soft iron distortion)으로 분류될 수 있는데, 강성 왜곡은 자기력선을 편향시켜 자력계 센서 상에 오프셋을 생성할 수 있는 강재 공구와 같은 강자성 물질의 도입으로 인해 일어나고, 약성 왜곡은 그 형상이 가변적인 불규칙 자기장(예컨대, 자석)으로 인해 일어난다. 왜곡을 일으키는 이런 기기가 예측할 수 없는 배향으로 예측할 수 없는 위치에서 예측할 수 없는 시간에 IMU의 적용 필드(사용 영역)를 들고 나게 된다는 점을 감안하면, 이런 왜곡을 검출하고 처리하는 것이 바람직하다. 일례로, 왜곡이 흔히 일어나는 영역으로는 수술이 진행 중인 수술실이 있다. 보다 구체적으로, 수술실 내의 수술기구는 외과 수술의 단계에 따라 시간대별로 위치를 달리하면서 수술 영역 내에서 빈번히 재배치되는데, 이는 필연적으로 자기장 왜곡을 유발한다. 그러나, 본 발명은 수술용 내비게이션 또는 어떤 특정 사용 분야를 위한 IMU의 캘리브레이션에 한정되지 않는다. 오히려, 본 발명은 국소 왜곡이 존재할 수 있는 사용 영역이라면 어디에서든 IMU를 캘리브레이션하는 데 적용 가능하다.
일시적 자기 왜곡을 감지하는 데는 두 가지 중요한 요소가 있다. 첫 번째 요소는 IMU가 (공통 회로기판에 설치 가능한) 두 개 이상의 자력계를 포함하여야 한다는 것이다. 자력계는 전술한 캘리브레이션 방법에 기초하여 캘리브레이션되고 정렬된다. 두 번째 요소는 두 가지 과정, 즉, (1) 캘리브레이션 데이터로부터 계산되는 왜곡 검출용 파라미터를 추출하는 과정과 (2) 포착된 IMU 데이터에 추출된 파라미터를 사용하여 왜곡의 존재 여부를 확인하는 과정으로 구성되는 검출 알고리즘이다.
다음으로, 적절한 왜곡 임계값 파라미터의 계산을 자세히 설명한다. 일반적으로, 하기 가정을 활용할 수 있는 계산 알고리즘이 사용될 수 있다: (1) IMU의 움직임(또는 움직임 없음)은 모든 IMU(가속도계, 자이로스코프 및 자력계)에 의해 검출될 수 있다; (2) 캘리브레이션된 자력계의 각도 및 길이는 대략 동일한 값을 가져야 한다; (3) 캘리브레이션된 자력계의 벡터는 크기가 대략 1이어야 한다; (4) 캘리브레이션된 자력계 벡터와 캘리브레이션된 가속도계 벡터 사이의 각도는 불변이어야 한다; (5) 캘리브레이션된 자력계의 반경은 대략 1이어야 한다; (6) 상이한 자력계를 사용하여 계산된 쿼터니언은 대략 동일하여야 한다.
가정 1로부터의 충분한 일탈은 움직임 이상으로 간주되고, 가정 2 내지 6으로부터의 일탈은 자기 이상으로 간주된다. 움직임 검출을 위한 파라미터는 국소 환경 캘리브레이션 중에 수집된 데이터를 사용하여 각각의 IMU 센서(가속도계, 자이로스코프 및 자력계)별로 산출된다. 정적 및 동적 데이터를 사용하여 모든 IMU 센서에 대해 적절한 움직임 임계값이 계산되는 바, 임계값을 초과하는 캘리브레이션된 IMU 센서의 출력값은 해당 센서가 움직이고 있다는 것을 나타내고, 캘리브레이션된 IMU 센서의 출력값이 임계값 미만이면 해당 센서는 정지 상태에 있는 것으로 간주될 수 있다(식 2 참조). 움직임 이상은 표 2에서와 같이 발생하는 것으로 간주되는데, 이에 대해서는 뒤에서 자세히 설명한다. 요컨대, 자력계에서는 움직임이 검출되지만 나머지 센서들에서는 움직임이 검출되지 않는다면 움직임 이상이 존재한다고 할 수 있다.
자기 이상의 경우, 가정 2로부터의 일탈은 비용 함수를 생성하기 위해 사용되는데, 이 비용 함수는 벡터 간 각도 편차값으로 가중치가 부여된 벡터 차이의 크기로서 계산된다(알고리즘 1 및 알고리즘 4 참조). 국소 환경 캘리브레이션 중에, 비용 함수를 형성하기 위해 1로부터의 예상 편차값과 동일 신호로부터의 예상 편차값이 산출된다. (추가적인 왜곡이 존재하지 않을 경우) 임계값은 국소 환경 캘리브레이션 중에 상기 비용 함수의 값으로부터 계산된다. 그 후, 이상 검출 과정의 일환으로서, 임계값을 초과하는 비용 함수의 값은 자기 이상으로 간주된다.
가정 3의 경우, 자기장 세기는 결합 강도의 평균으로 계산되는데(알고리즘 (5) 참조), 이 평균값은 잡음이 없을 경우 대략 1일 것으로 예상된다. 그 후, 이상 검출 과정의 일환으로서, (소정의 허용 오차를 포함하는) 계산된 자기장 세기를 벗어나는 값은 이상으로 간주된다.
가정 4의 경우, 해당 일탈은 자력계 벡터와 가속도계 벡터 사이의 각도 편차로 계산된다(알고리즘 (6)). 그 후, 이상 검출 과정의 일환으로, (소정의 허용 오차를 포함하는) 계산된 각도를 벗어나는 값은 이상으로 간주된다.
가정 5의 경우, 알고리즘 (7)에 제시된 바와 같은 타원체 평가 함수를 사용하여 자기장의 반경을 추정하기 위해, 해당 일탈은 소정의 인공점 세트와 함께 모든 자력계 판독값을 사용하여 계산된다. 인공점은 추정 계산을 지원하기 위해 사용된다. 그러나 IMU가 11 개보다 많은 자력계를 포함하는 경우에는 반경을 구하기 위해 인공점이 필요하지 않다. 그후, 이상 검출 과정의 일환으로, (소정의 허용 오차를 포함하는) 계산된 반경을 벗어나는 값은 이상으로 간주된다.
가정 6의 경우, 먼저 입력으로서 상이한 자력계를 사용하는 센서 통합 알고리즘(예컨대, 확장형 칼만 필터)을 사용하여 IMU의 배향을 계산하고, 알고리즘 (8)에 도시된 바와 같이 출력된 배향 간의 각도 차를 계산함으로써 해당 일탈을 결정한다. 그 후, 이상 검출 과정의 일환으로서, 소정의 허용 오차를 포함하는 각도 차보다 큰 값은 이상으로 간주된다.
만일 움직임 이상 또는 자기 이상이 발생한다면, 어떤 원인 불명의 자기 왜곡이 존재한다. 왜곡 경보 시스템은 센서에 의해 보고된 배향의 신뢰성이 부정확할 수 있다는 것을 나타내는 피드백을 제공한다. 다음으로, 움직임 이상 및 자기 이상을 검출하기 위해 알고리즘을 보다 상세히 설명한다.
이상 검출은 세 가지 검출 범주를 기반으로 한다. 첫 번째는 센서 결함 감지이고, 두 번째는 자력계 반경 확인이고, 세 번째는 쿼터니언 출력 불일치이다. 센서 결함 감지는 하기 기능으로 구성된다: (i) 움직임 이상 및 자기 이상, (ⅱ) 자기 세기, (ⅲ) 자력계와 가속도계 벡터 사이의 각도. 하기 방법은 캘리브레이션으로부터 움직임 이상 및 비용 함수에 대한 임계값(TV)을 지속적으로 추출하기 위해 사용된다. 본 방법은 하기 알고리즘 (1)을 활용한다.


알고리즘 (1)로부터 반복이 완료되고 나면, 하기 식 11 및 12를 사용하여 비용 함수의 뮤(mu)와 시그마(sigma)를 결정할 수 있다.

알고리즘 (2)는 센서에 대해 움직임 상태 및 움직임 없음(정지) 상태를 계산하기 위해 활용된다.

모든 움직임 상태가 대응하는 정지 상태보다 큰 값을 갖도록 보장하기 위해 점검이 수행된다.
알고리즘 (3)은 움직임 이상에 대한 TV를 계산하기 위해 사용된다.

자기 이상의 결정은 알고리즘 (4)에 제시된 바와 같이 캘리브레이션 기간에 걸쳐 비용 함수를 계산함으로써 구해지는 비용 함수 TV에 기초할 수 있다.

캘리브레이션 데이터로부터 자기 이상의 세기를 파악하기 위한 TV를 지속적으로 추출하기 위해 알고리즘 (5)을 사용할 수 있다.

캘리브레이션 데이터로부터 자력계 벡터와 가속도계 벡터 사이의 각도를 파악하기 위한 TV를 지속적으로 추출하기 위해 알고리즘 (6)을 사용할 수 있다.


정렬 전에, 자력계 반경의 검산이 캘리브레이션된 자력계 데이터에 대해 수행된다. 정규점 세트의 반경은 1이어야 한다. 반경 임계값을 결정하기 위해 알고리즘 (7)이 사용될 수 있다. 알고리즘 (7) 사용의 일환으로서, 단위 구체 상에 인공점 세트가 생성되는데, 인공점 세트는 실질적으로 균일하게 분포되어야 하고 최소 18 개의 인공점을 가져야 한다. 후술하는 바와 같이, 인공점에 대해 타원체 피팅 방법을 사용함으로써, 처리된 자력계 데이터를 활용하여 반경을 결정할 수 있다.

쿼터니언 출력 불일치는 상이한 자력계를 사용하여 계산된 배향 출력을 기반으로 하는 검출 방법이다. 하기 알고리즘 (8)은 알고리즘 (6)으로부터 얻은 쿼터니언 출력을 사용하여 쿼터니언 출력 불일치 임계값을 결정하고 쿼터니언 사이의 각도를 계산하기 위해 사용될 수 있다.

이상 검출용 TV를 추출한 후, IMU가 국소 이상에 의해 영향을 받고 있는지를 결정하기 위해 하기 계산을 이용할 수 있다. 선행 단계로서, 모든 착신 센서 데이터를 상기 식 1 내지 10을 사용하여 처리할 수 있다. 또한, 알고리즘 (1) 및 (4)를 이용하여 소정의 커널 크기 이내에서 자력계 사이의 상대 편차를 결정할 수 있다. 예시적인 센서 결함 검출 시스템의 경우, 움직임은 표 (1)에 제시된 하기 규칙에 기초하여 검출된다.
표 (1): 센서 기반 움직임 검출

소정의 커널 크기 이내에서, 표 (2)에 제시된 하기 규칙이 움직임 이상을 검출하기 위해 사용된다.
표 (2): 움직임 이상 검출
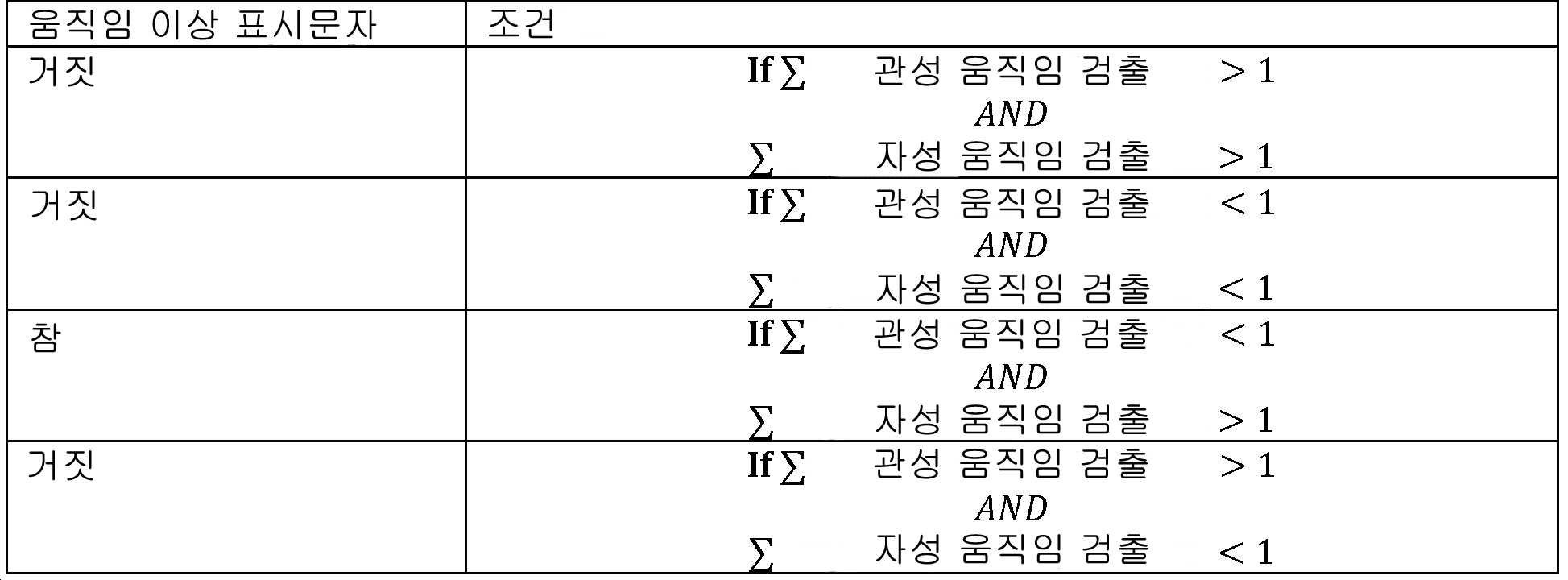
표 3에 제시된 하기 규칙은 자기 이상을 검출하기 위해 사용된다.
표 (3): 자기 이상 검출

본 발명에 따르면, 알고리즘 (5)을 사용하여 자기 세기를 계산할 수 있다. 그 후, 표 (4)의 규칙을 사용하여 자기 이상의 존재 여부를 파악할 수 있다.
표 (4): 자기 강도 이상 검출

본 발명에 따르면, 알고리즘 (6)을 이용하여 자력계 벡터와 가속도계 벡터 사이의 각도를 결정할 수 있다. 본 검출은 IMU/센서가 정지 상태일 때만 활성화되는데, 이는 움직임 검출 알고리즘으로부터 검출된다. 하기 표 (5)를 이용하여, 자력계 및 가속도계 벡터 이상의 존재 여부를 파악할 수 있다.
표 (5): 자력계 및 가속도계 벡터 이상 검출

본 발명에 따르면, 알고리즘 (7)을 사용하여 자력계로부터의 원 데이터를 처리함으로써 자기 반경을 결정할 수 있다. 하기 표 (6)을 이용하여 자기 반경 이상의 존재 여부를 파악할 수 있다.
표 (6): 자기 반경 이상 검출

본 발명에 따르면, 알고리즘 (6)을 사용하여 IMU의 배향을 계산하고 알고리즘 (8)을 사용하여 각도 차를 계산할 수 있다. 하기 표 (7)을 사용하여, 쿼터니온 출력 불일치의 존재 여부를 파악할 수 있다.
표 (7): 쿼터니온 불일치 검출

이들 하위 검출 시스템으로부터의 출력값을 이용하여 이상 검출에 가중치를 부여할 수 있으며, 이를 통해 해당 시스템에 의해 검출된 관련 장애 수준을 결정할 수 있다. 높은 수준의 신뢰성을 요구하는 시스템의 경우, 이들 하위 시스템 표시문자 중 어느 것이라도 검출되면 이상으로 간주되어야 한다.
다음으로, IMU가 강자성 물체와 함께 사용되거나 강자성 물체에 근접한 상태일 때 IMU를 캘리브레이션하는 과정을 설명한다. 의료 기기 사용 분야에서 일례를 들자면 수술용 내비게이션이 실행되고 있는 상황을 들 수 있는데, 이런 상황에서는 강자성 물체(예컨대, 스테인리스 강 또는 CoCr 등으로 제조된 공구)의 움직임을 추적하기 위해 IMU가 필요하다. 국소 환경 캘리브레이션은 이런 강자성 물체가 근접하지 않은 상태를 가정하여 수행되기 때문에 국소 환경 캘리브레이션 단계 중에는 강자성 물체로 인한 왜곡을 보상할 방법이 없다. 강자성 물체가 IMU에 근접하여 사용될 때 발생하는 왜곡을 캘리브레이션하기 위해서는 이차적인 캘리브레이션 단계를 수행해야 한다. 본 발명의 방법은 IMU가 사용 중에 강자성 물체에 견고히 고정될 수 있다는 사실을 감안한다.
재캘리브레이션(re-calibration)을 위한 데이터의 일괄 수집을 위해 강자성 물체에 부착된 IMU를 수동으로 조작하는 것이 가능하긴 하나, 이 방법은 비효율적이며 사용자가 캘리브레이션이 필요한 각각의 강자성 물체에 대한 조작을 반복하는 데 상당한 시간이 소요된다. 둘째로, 국소 환경 및 강자성 물체의 복합적인 효과에 대한 캘리브레이션이 국소 환경만의 캘리브레이션과 일치하지 않을 가능성이 있다. 이들 캘리브레이션 중 어느 하나가 요(yaw)의 추적을 위해 기능할 수 있으나, 기준 필드 상에서 이루어지는 캘리브레이션 사이의 잠재적 변환으로 인해 에러가 유발될 수 있다. 예로서, 하나는 지면에 대해 수평하고 다른 하나는 5 도로 기울어진 두 개의 나침반의 판독값을 비교하는 것을 상정할 수 있다. 수평한 나침반은 국소 환경에 맞추어 캘리브레이션되고, 다른 나침반은 강자성 물체와 국소 환경 모두에 맞추어 캘리브레이션된다. 이들 두 캘리브레이션 모두 제대로 기능하긴 하나, 각각의 나침반의 판독값은 상이할 수 있다. 따라서, 본 발명의 예시적인 알고리즘은 이런 문제점들을 모두 다룬다.
본 발명의 방법은 저자장강도 강자성 물체의 왜곡 특성을 이용하며, 한정된 양의 데이터 입력에 기초하여 보정(correction)을 모델링한다. 이를 통해, 훨씬 간단한 캘리브레이션 조작이 가능해지면서 여전히 적정한 캘리브레이션을 달성할 수 있다.
도 1 내지 3을 참조하면, IMU(102)에 부착된 물체(100)(또는 IMU(102) 자체)는 IMU 데이터로부터 확인 가능한 일련의 배향을 통해 이동된다. 수집된 데이터로부터, 표준 타원체 처리 및 분석을 통해 왜곡장의 초기 추정치를 계산할 수 있다. (현재 25000 개의 벡터를 사용하는) 기준 데이터 세트가 폰 미제스 피셔 밀도로부터 도출되어 IMU의 권역 주위에 균일하게 분포된 벡터 세트를 생성한다. 국소 환경 캘리브레이션 중에 계산된 자기 왜곡과, 강자성체로 인한 자기 왜곡의 초기 추정치는 기준 데이터 세트에 대해 역으로 적용된다. 이를 통해 두 개의 데이터 세트, 즉, (1) 국소 환경에 의해 왜곡되는 기준 데이터 세트와 (2) 국소 환경 및 부착된 강자성 물체(100)(또는 IMU(102)에 근접한 강자성 물체)에 의해 왜곡되는 기준 데이터 세트가 생성된다. 이들 두 데이터 세트 사이의 모든 점들은 동일한 기준 데이터 세트에서 유래하기 때문에, 국소 환경 왜곡과 강자성 물체에 의한 국소 환경 왜곡 사이에 점대점 대응이 성립한다. 그 후, 강자성 물체에 대한 캘리브레이션이 이전의 데이터 세트를 이용한 재귀 최적화 알고리즘을 사용하여 후자의 기준 데이터 세트로부터 추출된다.
이런 예시적인 캘리브레이션 과정은 임의의 개수의 물체에 대해 사용될 수 있는 바, 잠재 자기장을 갖는 다수의 물체가 센서의 정확도를 손상시키지 않고 일관된 기준 필드를 유지하면서 자력계와 함께 사용될 수 있다.
다음 절에서는 사전-캘리브레이션된 IMU로 강자성 물체를 캘리브레이션하기 위한 알고리즘을 설명한다. 여기서는 IMU가 전술한 바와 같은 과정에 따라 사전에 캘리브레이션되어 있다고 가정한다. 이 캘리브레이션 시퀀스의 일환으로서, IMU는 공구에 견고히 부착되거나 아니면 IMU에 대한 공구의 위치가 불변이어야 한다. 조작자는 도 1 내지 도 3에 도시된 바와 같이 표준 데카르트 좌표계 내에서 각각의 축을 따라 물체를 적어도 일회전시킨다. 공구 캘리브레이션 데이터 세트가 수집되고 나면, 하기 알고리즘을 사용하여 왜곡을 계산하고 보상할 수 있다.
초기 문제로서, 하기 식 13을 사용하여 데이터 세트의 중심 오프셋에 대해 초기 추측이 이루어진다.
그 후, 많은 수의 (예를 들어, 25,000 개의) 무작위 3D 단위 벡터가 생성되고, 하기 알고리즘 (9)을 사용하여 원 SFe 및 계기 SFe의 역수가 벡터에 적용된다.

하기 식 14를 사용하여 점 대응 변환을 계산한다.
하기 식 15를 사용하여 점대점 왜곡 거리를 계산한다.
하기 식 16을 사용하여 각각의 축에 대해 Diff ND 의 최대 음수를 파악한다.
하기 식 17을 사용하여 loc의 인덱스 위치를 계산한다.
loc의 인덱스 위치:
하기 식 18을 사용하여 최대 왜곡 거리 축을 따라 중심을 계산한다.
하기 식 19를 사용하여 최대 캘리브레이션 경계를 계산한다.
하기 식 20을 사용하여 왜곡 보상 파라미터를 계산한 후, 계기 캘리브레이션 데이터 세트가 중심에 오도록 조정한다.
전술한 캘리브레이션 보정은 적어도 두 가지 방식으로 적용될 수 있다. 첫 번째 방식으로, 캘리브레이션 보정은 하기 식 21과 같은 점 대응 변환을 사용하여 적용된다.
대안으로서, 두 번째 방식으로, 캘리브레이션 보정은 식 22 및 23을 사용하는 것과 같은, 기하학적 스케일링 및 보상을 사용하여 적용된다.

식 24를 사용하여, 조정된 캘리브레이션 파라미터를 계산할 수 있다.
결론적으로, 전술한 캘리브레이션 연산은 강자성 물체에 부착되거나 강자성 물체에 대해 위치가 고정되는 각각의 IMU의 자력계에 적용될 수 있다. 캘리브레이션 연산을 각각의 IMU의 자력계에 적용하기 위해, 식 20을 사용하여 자력계 데이터를 중심에 오도록 조정한다. 예로서, 식 21을 사용하는 점 대응 변환을 통해 공구에 의한 왜곡을 처리하기 위해 보정을 적용하거나, 식 22 및 23을 사용하여 기하학적 스케일링 및 보상을 적용할 수 있다. 그 후, 하기 식 25를 통해 조정된 약성 및 강성 왜곡 보상 파라미터를 적용함으로써 IMU의 자력계를 처리할 수 있다.
자력계가 처리되고 나면, 자력계는 식 9 및 식 10을 사용하여 정렬된다.
위의 설명 및 본 발명의 요약에 이어, 이에 설명된 상기 방법 및 장치는 본 발명의 예시적인 실시예를 구성하는 것으로서 본 발명은 이러한 정밀한 실시예에 한정되지 않으며, 이러한 실시예에 대하여 특허 청구의 범위에 정의된 본 발명의 범위로부터 벗어나지 않도록 변경이 가능함을 당업자에게 명백하다. 또한, 본 발명은 상기 특허 청구의 범위에 의하여 정의되며, 여기에 기재된 상기 예시적인 실시 예를 설명하는 어떠한 제한 또는 요소도 그러한 제한 또는 요소가 명백히 언급되지 않는 한 청구항 요소의 해석에 포함되도록 의도된 것이 아니다. 마찬가지로, 본 발명은 상기 특허 청구의 범위에 의하여 정의되며 또한 본 발명 고유의 및/또는 예상치 못한 장점이 여기에 명시적으로 기재되지 않았을 수도 있으나 존재할 수 있으므로, 여기에 기재된 본 발명의 명시된 장점 또는 목적 중 어느 것 또는 모든 것이 특허 청구의 범위 내에 있도록 충족되어야 할 필요는 없다.
부록 A
[발명의 명칭]
뼈 재건 및 정형외과용 임플란트{BONE RECONSTRUCTION AND ORTHOPEDIC IMPLANTS}
[기술분야]
관련출원 상호참조
본 출원은 "두개골 및 후 두개골 뼈 및 연조직 재건(CRANIUM AND POSTCRANIAL BONE AND SOFT TISSUE RECONSTRUCTION)"이라는 제목으로 2013년 12월 9일자로 출원된 미국 임시 특허 출원 제 61/913,608 호, "두개골 및 후 두개골 뼈 및 연조직 재건(CRANIUM AND POSTCRANIAL BONE AND SOFT TISSUE RECONSTRUCTION)"이라는 제목으로 2014년 3월 11일자로 출원된 미국 임시 특허 출원 제 61/951,221 호, "두개골 및 후 두개골 뼈 및 연조직 재건(CRANIUM AND POSTCRANIAL BONE AND SOFT TISSUE RECONSTRUCTION)"이라는 제목으로 2014년 4월 10일자로 출원된 미국 임시 특허 출원 제 61/977,984 호, 및 "두개골 및 후 두개골 뼈 및 연조직 재건(CRANIUM AND POSTCRANIAL BONE AND SOFT TISSUE RECONSTRUCTION)"이라는 제목으로 2014년 7월 10일자로 출원된 미국 임시 특허 출원 제 62/022,899 호의 이익을 청구하며, 그 각각의 개시 내용은 이에 참조로 결부된다.
[배경기술]
발명의 분야
본 개시 내용은 정형외과 수술시의 뼈 및 생체조직 재건, 환자-맞춤형 및 대량 맞춤형 정형외과용 임플란트, 성별 및 민족성에 따른 맞춤형 정형외과용 임플란트, 절단 가이드, 외상 판, 뼈 이식편 절단 및 배치 가이드, 환자-맞춤형 기구, 운동학 및 병리학을 위한 인체 추적용 관성 측정 장치의 이용, 및 내비게이션용 관성 측정 장치의 이용을 포함하여 다양한 정형외과적 측면에 관한 것이다.
[발명의 내용]
[과제의 해결 수단]
발명의 소개
본 발명의 제 1 양상은 1차 프로세서에 통신 결합된 신호 수신기로 이루어지는 수술용 네비게이션 시스템을 제공하는 것으로서, 상기 1차 프로세서는 수술용 공구에 장착된 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 순차적인 몬테 카를로 알고리즘을 이용하도록 프로그램되고, 상기 프로세서는 다수의 수술용 공구 각각에 대하여 특유한 도구 데이터를 저장하는 제 1 메모리 및 인체 특징의 3차원적 모델을 구성하기에 충분한 모델 데이터를 저장하는 제 2 메모리에 통신 결합되며, 상기 1차 프로세서는 상기 인체 특징에 대하여 상기 수술용 공구의 3차원적 위치에 대한 시각적 피드백을 제공하는 디스플레이에 통신 결합된다.
상기 제 1 양상의 보다 상세한 일 실시예에서, 상기 수술용 네비게이션 시스템은 데이터를 상기 1차 프로세서에 전송하기 위하여 제 1 온보드 프로세서 및 제 1 무선 송신기에 통신 결합된 참조 관성 측정 장치를 더욱 포함하고, 상기 참조 관성 측정 장치는 상기 인체 특징에 부착되도록 구성되며, 상기 제 1 온-보드 프로세서는 상기 참조 관성 측정 장치로부터의 데이터 전송을 상기 제 1 무선 송신기로 안내하고, 상기 수술용 공구에 장착된 상기 관성 측정 장치는 제 2 온-보드 프로세서 및 제 2 무선 송신기에 통신 결합된 유틸리티 관성 측정 장치로 이루어지고, 상기 제 2 온-보드 프로세서는 상기 다수의 수술용 공구 중 하나에 장착되도록 구성되며, 그리고, 상기 1차 프로세서는 상기 제 1 무선 송신기로부터의 데이터 및 상기 제 2 무선 송신기로부터의 데이터를 수신하도록 구성된 1차에 통신 결합된다. 보다 상세한 또 다른 일 실시예에서, 상기 제 2 온-보드 프로세서는 상기 유틸리티 관성 측정 장치가 장착된 수술용 공구를 명시하는 상기 제 2 무선 송신기를 통하여 통신을 안내한다. 더욱 상세한 다른 일 실시예에서, 상기 관성 측정 장치는 적어도 3개의 가속도계 및 3개의 자력계를 포함하며, 상기 적어도 3개의 가속도계 각각은 총 9개의 가속도계 데이터 스트림에 대하여 3개의 축에 관한 데이터를 출력하고, 상기 적어도 3개의 자력계 각각은 총 9개의 자력계 데이터 스트림에 대하여 3개의 축에 관한 데이터를 출력하고, 그리고 상기 1차 프로세서는 상기 수술용 공구에 장착된 상기 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 상기 9개의 가속도계 데이터 스트림 및 상기 9개의 자력계 데이터 스트림을 이용한다. 더욱 상세한 또 다른 일 실시예에서, 상기 제 2 메모리에 저장된 모델 데이터는 상기 인체 특징의 3차원적 가상 모델을 포함하며, 상기 제 1 메모리에 저장된 도구 데이터는 상기 다수의 수술용 공구의 3차원적 가상 모델을 포함하고, 상기 디스플레이는 상기 인체 특징의 3차원적 가상 모델을 디스플레이하고, 상기 디스플레이는 상기 수술용 공구의 3차원적 가상 모델을 디스플레이하고, 상기 1차 프로세서는 상기 인체 특징의 3차원적 가상 모델을 재위치 시키기 위하여 상기 참조 관성 측정 장치로부터의 데이터를 이용하도록 작동되고, 그리고, 상기 1차 프로세서는 상기 수술용 공구의 3차원적 가상 모델을 재위치 시키기 위하여 상기 유틸리티 관성 측정 장치로부터의 데이터를 이용하도록 작동된다. 보다 상세한 일 실시예에서, 상기 1차 프로세서는 실시간으로 상기 인체 특징의 3차원적 가상 모델에 대하여 상기 수술용 공구의 3차원적 가상 모델을 재위치 시키기 위하여 상기 관성 측정 장치로부터의 데이터를 이용하도록 작동된다. 보다 상세한 일 실시예에서, 상기 순차적인 몬테 카를로 알고리즘은 폰 미제스 피셔(von Mises-Fisher) 밀도 알고리즘 요소를 포함한다. 보다 상세한 또 다른 일 실시예에서, 상기 제 1 메모리에 저장된 도구 데이터는 상기 수술용 공구의 엔드 이펙터와 상기 수술용 장치 상의 상기 관성 측정 장치 장착 위치 사이의 상대거리를 나타내는 위치 데이터를 포함하고, 그리고, 상기 수술용 공구는 리머, 위치된 컵, 임팩터, 드릴, 톱, 및 절단 가이드 중 적어도 하나를 포함한다. 보다 상세한 또 다른 일 실시예에서, 상기 관성 측정 장치는 적어도 3개의 자력계를 포함하며, 그리고, 상기 디스플레이는 상기 수술용 공구에 결합된 것 또는 상기 1차 프로세서에 결합된 것 중 적어도 하나이다.
본 발명의 제 2 양상은: (a) 제 1 축을 따라 중간 플랫폼에 대하여 회전 재위치 가능한 1차 플랫폼; (b) 상기 제 1 축에 대하여 수직인 제 2 축을 따라 상기 중간 플랫폼에 대하여 회전 재위치 가능하며, 관성 측정 장치에 장착되도록 구성된 리테이너를 포함하는 최종 플랫폼; 그리고, (c) 상기 관성 측정 장치에 통신 결합되도록 구성된 프로세서 및 관련 소프트웨어로 이루어지며, 상기 소프트웨어는 상기 1차 플랫폼이 상기 중간 플랫폼에 대하여 회전되는 동안 및 상기 최종 플랫폼이 상기 중간 플랫폼에 대하여 회전되는 동안 상기 관성 측정 장치에 관련된 자력계로부터 출력된 데이터를 이용하도록 그리고 타원체에 유사한 데이터 세트를 기록하도록 작동되며, 상기 소프트웨어는 상기 데이터 세트에 구(球)를 맞추도록 그리고 국소 자기장에서 왜곡을 확인하기 위하여 자력계 정정 계산을 발생하도록 작동하여, 상기 자력계로부터의 미래 데이터 출력을 정상화함을 특징으로 하는, 자력계 및 가속도계를 포함하는 관성 측정 장치를 위한, 캘리브레이션 시스템을 제공하는 것이다.
상기 제 2 양상의 보다 상세한 일 실시 예에서, 상기 1차 플랫폼은 고정적이다. 보다 상세한 또 다른 일 실시 예에서, 상기 1차 플랫폼 상기 1차 플랫폼에 대하여 상기 중간 플랫폼의 회전을 유발하도록 구성되는 모터를 적어도 부분적으로 수용한다. 더욱 상세한 일 실시예에서, 상기 소프트웨어는, 상기 가속도계로부터의 미래 데이터 출력을 정상화하기 위하여, 상기 관성 측정 장치가 제 1 정지 위치에 있는 동안 상기 관성 측정 장치에 관련된 가속도계로부터 출력된 제 1 데이터 세트를 이용하도록 작동되고 상기 제 1 정지 위치와 상이한 제 2 정지 위치에서 상기 가속도계로부터 출력된 제 2 데이터 세트를 이용하도록 작동된다. 더욱 상세한 또 다른 일 실시예에서, 상기 제 1 정지 위치는 상기 중간 플랫폼에 대하여 제 1 고정 위치에 있는 상기 1차 플랫폼에 상응하고 및 상기 최종 플랫폼은 상기 중간 플랫폼에 대하여 제 2 고정 위치에 있고, 그리고 상기 제 2 정지 위치는 상기 중간 플랫폼에 대하여 제 3 고정 위치에 있는 상기 1차 플랫폼 중 적어도 하나에 상응하고 상기 최종 플랫폼은 상기 중간 플랫폼에 대하여 제 4 고정 위치에 있다. 보다 상세한 일 실시예에서, 상기 최종 플랫폼은 다수의 리테이너를 포함하며, 상기 다수의 리테이너 각각은 다수의 관성 측정 장치 중 적어도 하나에 장착되도록 구성된다.
본 발명의 제 3 양상은: (a) 상기 제 1 자력계로부터 미가공 국소 자기장 데이터를 동시에 수신하면서, 제 1 관성 측정 장치를 포함하는 제 1 관성 측정 장치를 제 1 회전축 및 제 2 회전축에 대하여 회전시키고, 상기 제 1 회전축은 상기 제 2 회전축에 대하여 수직임; (b) 국소 자기장에서 왜곡을 계산하기 위하여 상기 미가공 국소 자기장 데이터에 획일적인 계산을 적용하고; 그리고, (c) 다듬어진 국소 자기장 데이터를 제공하기 위하여 상기 국소 자기장에서 계산된 왜곡을 확인함으로써 상기 자력계로부터 수신된 상기 미가공 국소 자기장 데이터를 정상화하는 단계로 이루어지는, 자력계를 포함하는 관성 측정 장치를 캘리브레이션하기 위한 방법을 제공하는 것이다. 상기 제 3 양상의 보다 상세한 일 실시 예에서, 상기 제 1 관성 측정 장치는 상기 제 1 관성 측정 장치는 제 1 가속도계를 포함하고, 상기 방법은: (i) 상기 제 1 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 1의 3차원적 위치에, 고정적인 상기 제 1 관성 측정 장치를 유지하고; (ii) 상기 제 1 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 2의 3차원적 위치에, 고정적인 상기 제 1 관성 측정 장치를 유지하고, 상기 제 2의 3차원적 위치는 상기 제 1의 3차원적 위치와 상이함; (iii) 상기 제 1 가속도계가 고정적인 때에 제로 가속도를 반영하도록 상기 제 1 가속도계로부터 수신된 데이터를 정상화하는 단계를 더욱 포함한다. 보다 상세한 또 다른 일 실시 예에서, 상기 제 1 관성 측정 장치는 제 2 가속도계를 포함하고, 상기 방법은: (i) 상기 제 2 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 3의 3차원적 위치에, 상기 제 1 가속도계가 고정적인 채로 유지되는 바와 같이, 고정적인 상기 제 2 관성 측정 장치를 유지하고; (ii) 상기 제 2 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 4의 3차원적 위치에, 상기 제 1 가속도계가 고정적인 채로 유지되는 바와 같이, 고정적인 상기 제 2 관성 측정 장치를 유지하고, 상기 제 4의 3차원적 위치는 상기 제 3의 3차원적 위치와 상이함; (iii) 상기 제 2 가속도계가 고정적인 때에 제로 가속도를 반영하도록 상기 제 2 가속도계로부터 수신된 데이터를 정상화하는 단계를 더욱 포함한다. 더욱 상세한 일 실시 예에서, 상기 미가공 국소 자기장 데이터는 3차원으로 타원체를 나타내며, 그리고, 상기 다듬어진 국소 자기장 데이터는 3차원으로 구를 나타낸다. 더욱 상세한 또 다른 일 실시 예에서, 상기 획일적인 계산은 상기 미가공 국소 자기장 데이터에 구를 맞춤을 포함하며, 그리고, 상기 미가공 국소 자기장 데이터를 정상화하는 것은 다듬어진 국소 자기장 데이터를 제공하기 위하여 상기 미가공 국소 자기장 데이터로부터 상기 계산된 왜곡을 제하는 것을 포함한다. 보다 상세한 일 실시 예에서, 상기 방법은 그 자신의 제 1 가속도계를 갖는 제 2 관성 측정 장치를 더욱 포함한다. 보다 상세한 일 실시 예에서, 상기 제 2 관성 측정 장치는 그 자신의 제 1 가속도계를 갖는다.
본 발명의 제 4 양상은: (a) 각각 고유의 인터페이스를 갖는 다수의 수술용 공구 중 하나에 관성 측정 장치를 장착하고; 그리고, (b) 상기 고유 인터페이스 판독에 대응하는 상기 다수의 수술용 공구 중 하나를 명시하기 위하여, 상기 관성 측정 장치에 통신 결합된 프로세서에 신호를 전송하도록 상기 고유 인터페이스를 판독하는 단계로 이루어지는, 관성 측정 장치에 결합될 때 수술용 공구를 명시하는 방법을 제공하는 것이다. 상기 제 4 양상의 보다 상세한 일 실시 예에서, 상기 관성 측정 장치는 다수의 스위치에 작동상 결합되고, 상기 고유 인터페이스는 상기 다수의 스위치 중 적어도 하나를 결합하고, 그리고, 상기 고유 인터페이스 판독 단계는 상기 다수의 스위치 중 어느 것이 상기 고유 인터페이스에 결합될지에 대하여 상기 프로세서에 의하여 결정함을 포함한다. 보다 상세한 또 다른 일 실시 예에서, 상기 프로세서는 상기 관성 측정 장치에 결합되고, 그리고, 상기 프로세서 및 관성 측정 장치는 공통의 하우징에 수용된다. 더욱 상세한 일 실시 예에서, 상기 프로세서는 상기 관성 측정 장치로부터 멀리 떨어져 있으며, 그리고, 상기 프로세서 및 관성 측정 장치는 공통의 하우징 내에 수용되지 않는다.
본 발명의 제 5 양상은: (a) 가속 데이터 및 자기 데이터를 발생하기 위하여 다수의 관성 측정 장치를 이용하고; (b) 수술 위치 근처에 상기 다수의 관성 측정 장치를 캘리브레이션하고; (c) 상기 다수의 관성 측정 장치로 이루어지는 제 1 및 제 2 관성 측정 장치의 상대 위치를 등록하고, 상대 위치 등록은 특정 위치 및 방향에서 환자의 인체에 고유하게 결합하는 등록 도구에 상기 제 1 관성 측정 장치를 장착함을 포함함, 상기 상대 위치 등록은 상기 환자에 상기 제 2 관성 측정 장치를 장착함을 포함함; (d) 등록 후 상기 제 1 관성 측정 장치를 수술용 공구에 부착하고; (e) 상기 환자의 인체와 관련된 수술 부위를 향하여 상기 수술용 공구 및 상기 제 1 관성 측정 장치를 재위치 시키고; 그리고, (f) 적어도 하나의 상기 환자의 인체가 보이지 않거나 또는 상기 수술용 공구의 작동 단부가 보이지 않을 때 상기 수술용 공구의 위치 및 방향 중 적어도 하나에 대하여 시각적 피드백을 제공하는 단계로 이루어지는, 수술용 네비게이션 수행방법을 제공하는 것이다.
본 발명의 제 6 양상은: (a) 가속 데이터 및 자기 데이터를 발생하기 위하여 다수의 관성 측정 장치를 이용하고; (b) 수술 위치 근처에 상기 다수의 관성 측정 장치를 캘리브레이션하고; (c) 상기 다수의 관성 측정 장치로 이루어지는 제 1 및 제 2 관성 측정 장치의 상대 위치를 등록하고, 여기에서 상대 위치 등록은 특정 위치 및 방향에서 환자의 인체에 고유하게 결합하는 등록 도구에 상기 제 1 관성 측정 장치를 장착함을 포함하고, 상기 상대 위치 등록은 상기 환자에 상기 제 2 관성 측정 장치를 장착함을 포함함; (d) 등록 후 상기 제 1 관성 측정 장치를 수술용 공구에 부착하고; (e) 상기 환자의 인체와 관련된 수술 부위를 향하여 상기 수술용 공구 및 상기 제 1 관성 측정 장치를 재위치 시키고; 그리고, (f) 상기 수술용 공구가 점유할 수 있는 위치 허용범위 및 방향 허용범위 중 적어도 하나를 명시하는 소정의 수술 계획에 대하여 상기 수술용 공구의 위치 및 방향에 대하여 시각적 피드백을 제공하는 단계로 이루어지는, 수술용 네비게이션 수행방법을 제공하는 것이다.
본 발명의 제 7 양상은: (a) 특정 뼈에 대한 다수의 3차원적 뼈 모델로 이루어지는 데이터베이스에 액세스하고; (b) 상기 다수의 3차원적 뼈 모델 각각에 대하여 길이방향 윤곽 및 단면 윤곽 중 적어도 하나로 이루어지는 특징에 액세스하고, 상기 길이방향 윤곽은 상기 다수의 3차원적 뼈 모델의 우세한 치수를 따라 취함; (c) 다수의 클러스터를 발생하기 위하여 상기 액세스된 특징에 기초하여 상기 다수의 3차원적 뼈 모델을 클러스터링하고, 상기 다수의 클러스터는 수치상으로 상기 다수의 3차원적 뼈 모델의 10 퍼센트 미만임; 그리고, (d) 상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 단계로 이루어지는, 특정 뼈에 대한 외상 판 제작방법. 을 제공하는 것이다.
상기 제 7 양상의 보다 상세한 일 실시 예에서, 상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 것은 상기 특정 뼈에 대한 연조직 부착을 피하기 위하여 고정 위치 선택을 포함한다. 보다 상세한 또 다른 일 실시 예에서, 상기 다수의 3차원적 뼈 모델은 적어도 하나의 공통성을 포함하며, 여기에서 상기 공통성은 성별, 민족성, 연령범위, 및 신장범위 중 적어도 하나로 이루어진다. 더욱 상세한 일 실시 예에서, 상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 것은 그 특정 클러스터에 평균 길이방향 윤곽 및 평균 단면 윤곽 중 적어도 하나를 결합시키는 것을 포함한다.
본 발명의 제 8 양상은: (a) 손상 또는 쇠퇴된 특정 뼈에 대하여 환자-맞춤형 영상 데이터를 구하고; (b) 상기 환자-맞춤형 영상 데이터를 이용하여 상기 특정 뼈가 없는 부분 및 상기 특정 뼈가 있는 부분 중 적어도 하나를 분석하고; (c) 상기 환자-맞춤형 영상 데이터에서 보이지 않는 뼈를 포함하는 통합된 상태에서 상기 특정 뼈의 환자-맞춤형 가상 뼈 모델을 발생하고; (d) 상기 환자-맞춤형 가상 뼈 모델의 윤곽에 액세스하고; 그리고, (e) 상기 환자-맞춤형 가상 뼈 모델을 이용하여 환자-맞춤형 외상 판을 발생하는 것으로 이루어지는, 특정 뼈에 대한 환자-맞춤형 외상 판 제작방법을 제공하는 것이다.
본 발명의 제 9 양상은: (a) 제 1 관성 측정 장치를 당해 환자의 제 1 인체 특징의 외부에 장착하고; (b) 제 2 관성 측정 장치를 당해 환자의 제 2 인체 특징의 외부에 장착하고; (c) 상기 제 1 관성 측정 장치를 이용하여 상기 당해 환자의 제 1 인체 특징의 가상 모델로 상기 환자의 제 1 인체 특징의 위치를 등록하고; (d) 상기 제 2 관성 측정 장치를 이용하여 상기 당해 환자의 제 2 인체 특징의 가상 모델로 상기 환자의 제 2 인체 특징의 위치를 등록하고; (e) 상기 제 1 관성 측정 장치를 이용하여 상기 환자의 제 1 인체 특징의 위치를 상기 제 1 인체 특징의 가상 모델과 동적으로 상관관계로 하고; 그리고, (f) 상기 제 2 관성 측정 장치를 이용하여 상기 환자의 제 2 인체 특징의 위치를 상기 제 2 인체 특징의 가상 모델과 동적으로 상관관계로 하는 것으로 이루어지는, 관성 측정 장치를 이용하여 환자 인체의 움직임을 운동학적으로 추적하기 위한 방법을 제공하는 것이다.
[도면의 간단한 설명]
도 1은 부분적인 인체로부터 대량 맞춤형 및 환자-맞춤형 금형을 제작하는 전반적인 과정을 나타낸 개략적인 다이어그램이다.
도 2는 관련성(correspondence)을 발생시키기 위하여 스태티스티컬 아틀라스에 새로운 인체 구조를 추가하는 방법을 상세히 나타낸 개략적인 다이어그램이다.
도 3은 도 2의 다중-해상도 3D 정합에 해당하는 다중-해상도 3D 정합 알고리즘이다.
도 4는 다중-스케일 특징을 이용한 다중-스케일 특징 정합이다.
도 5는 도 3에서 개략적으로 나타낸 다중-해상도 정합의 낮은 단계 내역이다.
도 6은 관련성의 발생에 따른 집단 내 캡쳐링 변화를 나타낸 도시하는 도면이다.
도 7은 부분적이거나, 기형이거나 또는 부서진 인체를 이용한 전체 뼈 재건 과정을 나타낸 개략적인 다이어그램이다.
도 8은 결함 템플릿의 생성을 위한 결함 분류 과정을 나타낸 개략적인 다이어그램이다.
도 9는 비구 결함에 대한 기존의 AAOS 분류의 도시 예이다.
도 10은 기존의 Paprosky 비구 결함 분류의 도시 예이다.
도 11은 기존의 Paprosky 비구 결함 소분류의 도시 예이다.
도 12은 표 및, 이에 관련된 도면으로서, 상이한 결함에 대한 골반 재건 결과를 나타내는 관련 도면이며, 이는 도 7에 묘사된 전체 뼈 재건의 예시적인 적용 및 검증이다.
도 13은 상이한 결함에 대한 골반 재건의 상기 평균 RMS 오차에 대한 거리맵으로서, 도 7에 묘사된 전체 뼈 재건의 정확도에 대한 검증하는 것이다.
도 14의 좌측은 심각한 골반 불연속성을 갖는 환자의 3차원적 모델 표상이다. 우측에는 좌측에 나타낸 상기 환자의 골반의 3차원적 모델에 대한 일 예가 도시된다.
도 15는 재건된 좌측 모델 및 본래의 환자 모델뿐 만 아니라 우측 및 좌측 인체의 비교이다.
도 16은 재건된 모델과 상기 재건된 골반 모델의 거울 이미지와의 사이의 거리맵이다.
도 17은 완전한 골반 불연속성 및 1.8 mm의 RMS 오차를 갖는 재건 결과를 갖는 환자이다.
도 18은 부분적인 두개골에 대한 재건 결과 및 재건 오차에 대한 평균 거리 맵이다.
도 19는 부서진 대퇴골의 재건 결과이다.
도 20은 환자-맞춤형 재건 임플란트를 제작하기 위한 과정을 나타낸 개략적인 다이어그램이다.
도 21은 도 20에 나타낸 임플란트 제작을 위한 상기 과정의 개략적인 다이어그램이다.
도 22는 부분적인 인체로부터 환자의 전체 인체를 재건하기 위한 그리고 골반 불연속성에 대한 환자 맞춤형 컵 임플란트를 제작하기 위한 다양한 단계를 나타내는 프로세스 흐름도이다.
도 23은 환자-맞춤형 비구 임플란트에 대한 환자-맞춤형 배치 가이드를 도시한 도면이다.
도 24는 대량 맞춤을 위하여 임플란트의 3개 부착부위와 상기 컵 방향 사이의 관계를 연구하기 위한 영상으로 이루어진다.
도 25는 본 개시 내용에 따라 비구 케이지의 대량 맞춤을 위한 순서를 나타내는 영상으로 이루어진다.
도 26은 모듈러 설계를 이용하여 대량 생산 맞춤형 비구 요소를 제작하기 위한 방법을 나타낸 개략적인 다이어그램이다.
도 27은 재건 수술을 위하여 환자-맞춤형 엉덩이 스템을 제작하기 위한 과정을 나타낸 개략적인 다이어그램이다.
도 28은 대량 맞춤형 임플란트 제작을 위한 과정을 나타낸 개략적인 다이어그램이다.
도 29는 대량 맞춤형 및 환자-맞춤형 엉덩이 임플란트를 모두 제작하기 위하여 스태티스티컬 아틀라스를 이용하기 위한 과정을 나타낸 개략적인 다이어그램이다.
도 30은 대량 맞춤형 및 환자-맞춤형 엉덩이 임플란트를 모두 제작하기 위하여 스태티스티컬 아틀라스를 이용하기 위한 과정을 나타낸 개략적인 다이어그램이다.
도 31은 개체군 특이적 엉덩이 스템 요소를 설계하기 위한 과정의 개요를 나타낸 개략적인 다이어그램이다.
도 32는 상기 대퇴골 근위부 표식자가 위치된 곳을 도시하는 도면이다.
도 33은 상기 대퇴골의 길이를 따라 상기 대퇴골 중앙의 관(관) 허리 및 대퇴골 허리를 나타내는 대퇴골의 3D 모델이다.
도 34는 상기 대퇴골 근위부 축이 위치된 곳을 도시하는 도면이다.
도 35는 상기 경부(목부) 중심 계산이 위치되는 곳을 도시하는 도면이다.
도 36은 대퇴골 근위부 인체 축을 정의하는 데에 사용되는 2개의 포인트를 도시하는 도면이다.
도 37은 3D 대퇴골 근위부 측정을 도시하는 도면이다.
도 38은 통상적인 2D로(XR로부터) 예시적인 Dorr 비율을 나타낸다.
도 39는 IM 협부에서 B/A 비율을 도시하는 도면이다.
도 40은 IM 관 측정을 도시하는 도면이다.
도 41은 윤곽 및 맞춤 원이다.
도 42는 상기 IM 관 대퇴골 반경 비율을 얻기 위하여 행하는 측정을 도시하는 도면이다.
도 43은 상기 반경 비율에서의 변화의 효과를 나타내기 위하여 좌측에 0.69의 반경 비율을 갖는 하나, 및 우측에 0.38 반경 비율을 갖는 하나로 2개의 대퇴골 모델을 도시한다.
도 44는 남성 및 여성에 대한 BMD 대 RRFW의 플롯뿐만 아니라, 각각의 데이터 세트(남성, 여성)에 대하여 최상의 라인이다.
도 45는 정렬 이전에 대퇴골 근위부의 내측 윤곽, 경부축 및 머리 포인트를 도시하는 도면이다.
도 46은 Z-방향으로 인체 축 정렬을 도시하는 도면이다.
도 47은 상기 대퇴경부 피벗 포인트를 이용하여 정렬된 내측 윤곽을 도시하는 도면이다.
도 48은 보간 평활도를 나타내기 위하여 모델들 간에 보간을 이용하여 생성된 상이한 모델을 도시하는 도면이다.
도 49는 뼈 밀도의 3차원적 매핑을 도표 및 그림으로 도시한 것이다.
도 50은 3 레벨에서, 및 상기 근위부축, 헤드 오프셋 및 대퇴골두에서 상기 IM 폭을 나타낸 X-선 도면이다.
도 51은 근위부 각도 대 헤드 오프셋의 도표이다.
도 52는 근위부 각도 대 헤드 높이의 도표이다.
도 53은 헤드 오프셋 대 헤드 높이의 도표이다.
도 54는 근위부 각도 히스토그램이다.
도 55는 헤드 오프셋 및 대퇴거(새발톱형) 직경에 대한 여성 및 남성의 클러스터를 나타내는 도표이다.
도 56은 헤드 오프셋 및 근위부 각도에 대한 여성 및 남성의 클러스터를 나타내는 도표이다.
도 57은 헤드 오프셋 히스토그램이다.
도 58은 IM 크기 히스토그램이다.
도 59는 대퇴골 근위부에 대한 여성 측정을 도시하는 도면이다.
도 60은 대퇴골 근위부에 대한 남성 측정을 도시하는 도면이다.
도 61은 상기 대전자 높이에 대한 여성 측정을 도시하는 도면이다.
도 62는 상기 대전자 높이에 대한 남성 측정을 도시하는 도면이다.
도 63은 남성과 여성 사이의 골수내 관 형상의 차이를 나타내는 그래픽 표시 및 표이다.
도 64는 정상 뼈 밀도 및 골질을 나타내는 여성 대퇴골 및 골수내 관을 나타낸다.
도 65는 정상 미만의 뼈 밀도 및 골질을 나타내는 여성 대퇴골 및 골수내 관을 나타낸다.
도 66은 골다공증을 나타내는 여성 대퇴골 및 골수내 관을 나타낸다.
도 67은 보간된 데이터 세트 헤드 오프셋 히스토그램으로 이루어지는 도표이다.
도 68은 관 크기 데이터 세트 히스토그램으로 이루어지는 도표이다.
도 69는 다양한 대퇴골 군에 대하여 내측 윤곽 및 헤드 중심 분포를 나타낸다.
도 70은 특정 크기 대퇴골 군에 대하여 헤드 오프셋 분포를 나타내는 플롯이다.
도 71은 남성 및 여성에 대한 전경 각도 측정을 반영하는 표이다.
도 72는 전측-후측 높이의 측정 방식을 나타내는 사진이다.
도 73은 남성 및 여성에 있어서 대퇴골의 피벗 포인트에 대하여 대퇴골에 대한 헤드 높이 대 전측-후측 헤드 높이의 플롯이며, 각각의 데이터 세트(남성, 여성)를 통한 최상의 선형 맞춤을 포함한다.
도 74는 남성 및 여성에 있어서 대퇴골의 인체축 중간-점에 대하여 대퇴골에 대한 헤드 높이 대 전측-후측 헤드 높이의 플롯이며, 각각의 데이터 세트(남성, 여성)를 통한 최상의 선형 맞춤을 포함한다.
도 75는 본 개시 내용에 따라 성별 및/또는 민족성 기반으로 엉덩이 스템 임플란트 패밀리의 제작에 이용되는 파라미터를 그래픽으로 묘사하는 것이다.
도 75. 클러스터링으로부터 추출된 대퇴골 스템 요소에 대한 대량 맞춤 임플란트 형상 파라미터
도 76은 1차 엉덩이 스템의 조립도 및 분해도를 나타낸다.
도 77은 수정 엉덩이 스템의 조립도 및 분해도를 나타낸다.
도 78은 본 개시 내용에 따라 표면 포인트의 그래픽 표시 및 비구컵 지오메트리를 분리하기 위한 평면의 활용을 나타낸다.
도 79는 본 개시 내용에 따라 제작되는 다수의 가상 3D 비구컵 인체 템플릿을 그래픽으로 나타낸다.
도 80은 다수의 컵 반경을 보이는 인체 비구컵 및 대퇴골 스템 볼 형상을 그래픽으로 나타낸다.
도 81은 상기 비구컵과 대퇴골두 사이의 곡률 매칭을 2차원적으로 나타낸다.
도 82는 상기 비구컵을 단면으로 분석하기 위하여 이용되는 골반의 매핑된 윤곽을 그래픽으로 나타낸다.
도 83은 비구 임플란트 컵 방향을 결정하기 위한 방법으로서 본 개시 내용에 따른 상기 횡방향 비구 인대의 자동 검출을 그래픽으로 나타낸다.
도 84는 상기 환자의 마이크로컴퓨터 단층촬영 스캔으로부터의 환자 뼈 구조에 매칭되도록 다공성 형상 및 크기를 추출하기 위한 순서를 그래픽으로 나타낸다.
도 85는 본 개시 내용에 따른 동물 특이적 임플란트 및 절단 가이드를 제작하기 위한 예시적인 프로세스 다이어그램이다.
도 86은 본 개시 내용에 따라 스태티스티컬 아틀라스를 이용하여 동물에 대한 대량 맞춤형 정형외과적 임플란트를 제작하기 위한 예시적인 프로세스 다이어그램이다.
도 87은 본 개시 내용에 따라 임플란트 시스템에 대한 환자 맞춤형 절단 및 배치 장치를 제작하기 위한 예시적인 프로세스 다이어그램이다.
도 88은 도 87로부터의 비-강체 정합 및, 본 개시 내용에 따른, x-선으로부터 환자 맞춤형 3차원적 골반 및 대퇴골 근위부 모델 제작에 대한 예시적인 프로세스 다이어그램이다.
도 89는 본 개시 내용에 따라 골반 및 대퇴골 근위부를 재건하는 데에 이용되는 사진 및 다수의 x-선 도면이다.
도 90은, 도 87에 나타낸 바와 같이, MRI 및 CT 스캔으로부터 골반 및 대퇴골 근위부의 자동 분할을 나타내는 예시적인 프로세스 다이어그램이다.
도 91은 역시, 도 87에 요약된 바와 같이, MRI 및 CT 스캔으로부터 복잡하고 부서진 인체의 자동 분할을 나타내는 예시적인 프로세스 다이어그램이다.
도 92는 엉덩이 재배치 과정에 이용되는 비구컵 및 대퇴골 스템을 모두 가상 템플레이팅하는 것에 대한 예시적인 프로세스 다이어그램이다.
도 93은 말단 고정을 이용한 자동 대퇴골 스템 배치에 대한 예시적인 프로세스 다이어그램으로서, 이는 도 92에 요약된 일반적인 프로세스의 구체적인 일 예이다.
도 94는 압입 및 3개의 접촉을 이용한 자동 대퇴골 스템 배치에 대한 예시적인 프로세스 다이어그램으로서, 이는 도 92에 요약된 일반적인 프로세스의 구체적인 일 예이다.
도 95는 본 개시 내용에 따른 자동 골반 랜드마킹을 그래픽으로 나타낸다.
도 96은 본 개시 내용에 따른 자동 컵 방향 및 배치를 그래픽으로 나타낸다.
도 97은 본 개시 내용에 따라 비구컵 및 대퇴골 스템 배치를 평가하기 위하여 측정 및 계산 데이터와 함께 일련의 x-선 중복을 포함한다.
도 98은 본 개시 내용에 따라 전반적인 사지 길이 복구 및 방향을 보장하기 위한 비구컵 및 대퇴골 스템 배치의 평가를 그래픽으로 나타낸다.
도 99는 본 개시 내용에 따라 임플란트 배치 및 사이징을 평가 및 수정하기 위한 사전계획 인터페이스의 스크린숏이다.
도 100은 대퇴골 스템의 절제 및 배치를 위하여 환자 맞춤형 도구를 이용하는 것에 대한 예시적인 프로세스를 나타내는 일련의 순서 영상으로 이루어진다.
도 101은 비구컵의 리밍 및 배치에 대하여 환자 맞춤형 가이드를 이용하는 것에 대한 예시적인 프로세스를 나타내는 일련의 순서 영상으로 이루어진다.
도 102는 본 개시 내용에 따라 환자 맞춤형 도구 및 로킹 메카니즘을 제작하기 위하여 이용가능한 관골구의 일련의 3D 가상 맵을 나타낸다.
도 103은 엉덩이 재배치 과정 중에 수술용 네비게이션의 일부로서 관성 측정 장치를 이용하는 것에 대한 예시적인 프로세스 다이어그램이다.
도 104는 엉덩이 재배치 과정 중에 수술용 네비게이션의 일부로서 관성 측정 장치를 이용하는 것에 대한 예시적인 프로세스를 나타내는 일련의 순서 영상이다.
도 105는 엉덩이 재배치 과정 중에 상기 대퇴골 특이적 수술용 네비게이션의 일부로서 관성 측정 장치를 이용하는 것에 대한 예시적인 프로세스를 나타내는 일련의 순서 영상이다.
도 106은 엉덩이 재배치 과정 중에 나중의 골반 특이적 수술용 네비게이션에 이용하기 위한 관성 측정 장치의 위치를 캘리브레이션하기 위한 예시적인 도구 및 프로세스를 그래픽으로 나타낸다.
도 107은 수술 과정 중 관성 측정 장치의 사용 준비 및 사용뿐만 아니라 상기 수술 과정의 종료 이후 수술 결과의 평가를 위한 관성 측정의 이용을 나타내는 예시적인 프로세스 흐름도이다.
도 108은 수술 과정 중에 수술용 네비게이션을 용이하게 하는 것의 일부로서 다양한 도구에 장착되는 관성 측정 장치 포드(pod)/하우징을 나타내는 일련의 영상을 나타낸다.
도 109는 관성 측정 장치(IMU) 포드/하우징, 상기 환자의 인체에 대한 위치에 관하여 IMU를 캘리브레이션하는 사진; 리머를 수술용으로 네비게이션하기 위한 상기 IMU의 활용을 나타내는 사진, 및, 최종적으로, 비구컵 임팩터를 수술용으로 네비게이션하기 위한 상기 IMU의 활용을 나타내는 사진을 나타내는 일련의 영상을 나타낸다.
도 110은 비구컵 임팩터뿐만 아니라 상기 환자의 인체의 모델(이 경우, 골반)을 나타내는 그래픽 인터페이스(삽도 사진)가 마련된 상기 IMU 포드의 활용 및 상기 수술용 사전계획 방향과 일치하는 상기 임팩터의 방향을 확인하는 임팩터 칼라 코드의 말단을 나타내는 픽쳐 인 픽쳐를 나타낸다.
도 111은 본 개시 내용에 따라 활용되는 IMU의 사진으로서, 상기 IMU의 상대적인 치수 특징을 나타내기 위하여 참조용 자와 함께 나타낸다.
도 112는 본 개시 내용에 따라 소정의 집단에 대하여 외상판 및 고정 장치를 제작하는 것에 대한 예시적인 프로세스 흐름도이다.
도 113은 뼈 또는 외상 판의 형상을 정의하기 위하여 스태티스티컬 아틀라스 내 뼈의 집단에 대하여 국소화된 상기 뼈 표면 상에 국소화된 포인트를 나타내는 평균 뼈로부터의 그래픽 영상이다.
도 114는 전체 집단 상의 판 장소의 전파를 나타내는 뼈의 그래픽 영상으로서, 여기에서는 단일의 사례에 대해 도시된다.
도 115는 판 자리의 전파 후 뼈/외상 판 정중선 곡선의 추출을 나타내는 그래픽 영상이다.
도 116은 외상 판 정중선 곡선에 대한 3D 곡률 반경(파라미터)의 계산 결과를 나타내는 그래픽도이다.
도 117은 판 장소의 전파 후 상기 외상 판의 길이를 계산하는 방식을 나타내는 그래픽도이다.
도 118은 판 장소의 전파 후 상기 외상 판의 중간-판 폭을 계산하는 방식을 나타내는 그래픽도이다.
도 119는 판 장소의 전파 후 상기 외상 판의 판 단면 반경을 계산하는 방식을 나타내는 그래픽도이다.
도 120은 클러스터의 최적의 수를 결정하는 데에 이용되는 판 크기 데이터의 플롯을 나타낸다.
도 121은 클러스터를 발생하기 위하여 활용되는 판 크기 데이터의 2D 및 3D 플롯을 포함한다(도 111에 "클러스터링"으로서 명시됨).
도 122는 판 크기의 파라미터화를 반영하는 여러 영상을 나타낸다(도 111에서 "파라미터화된 곡선" 및 "모델 생성"으로서 명시됨).
도 123은 상기 집단에 대한 일치성/적합성 평가를 위하여, 상기 클러스터로부터 상기 뼈 모델 중 하나에 맞추어진 특정 클러스터에 대하여 뼈/외상 판을 나타내는 예시적인 영상이다.
도 124는 상기 뼈/외상 판 표면의 밑면과 판 적합성을 평가하기 위하여 선택된 상기 뼈 모델의 표면 사이의 간격을 반영하는 3D 표면 거리 맵이다.
도 125는 근육 및 인대 충돌을 피하기 위하여 카데바 상에 설계된 판의 검증을 나타낸다.
도 126은 본 개시 내용에 따라 예시적인 환자-적합 빗장뼈 외상 시스템의 요소들 간의 상호 작용을 반영하는 예시적인 다이어그램이다.
도 127은 도 126에 나타낸 사전계획 요소들에 대한 예시적인 프로세스 흐름도이다.
도 128은 도 126에 나타낸 수술-중 가이던스에 대한 예시적인 프로세스 흐름도로서, 이 경우 형광투시법을 이용한다.
도 129는 부분적인 주변 구조를 갖는 상면도로부터의 빗장뼈 도해와 함께 나타낸 빗장뼈의 형광투시법 영상이다.
도 130은 도 126에 묘사된 상기 수술-중 가이던스에 대한 예시적인 프로세스 흐름도로서, 이 경우 초음파를 이용한다.
도 131은 다양한 움직임 동안 취한 X-선 또는 형광투시법 영상에 매칭된 그래픽 표시 및 하나 이상의 관성 측정 장치를 이용한 어깨 운동학의 수술-후 평가를 나타내는 플롯이다.
도 132는 부분적인 주변 구조와 함께 빗장뼈를 나타낸 한 쌍의 3차원적 도해이다.
도 133은 빗장뼈 뼈 모델 및, 상기 빗장뼈의 정중선 곡률을 명시하기 위하여 이용된, 상기 뼈 모델을 따라 표시된 포인트에 대한 2가지 상이한 도면을 나타낸다.
도 134는 빗장뼈 뼈 모델 및 상기 뼈 모델에 근육이 부착된 위치를 나타낸다.
도 135는 소정 집단에서 남성 및 여성의 평균 빗장뼈 모델에 대한 일련의 표면 맵 및 각각의 집단에 있어서의 형상 차이 정도를 나타낸다.
도 136은 상기 근육 부착부위와 관련된 윤곽 차이를 갖는 빗장뼈에 대한 한 쌍의 3차원적 도해이다.
도 137은 남성 및 여성 집단에서 취한 빗장뼈에 대한 일련의 단면도로서, 상기 다양한 근육 부착부위에서 상기 빗장뼈에 윤곽차이를 나타낸다.
도 138은 남성 및 여성 집단에서 취한 빗장뼈에 대한 일련의 단면도로서, 상기 빗장뼈의 길이를 따라 상기 빗장뼈에서의 윤곽 차이를 나타낸다.
도 139는 좌측 및 우측 빗장뼈 사이의 형태학적 차이를 반영하는 스태티스티컬 아틀라스 내 집단 데이터에 대응하여 생성된 좌측 및 우측 빗장뼈 모델을 나타낸다.
도 140은 본 개시 내용에 따라 상부 외측 판(좌측), 판 정중선 곡선(중앙), 및 곡률 반경을 나타내는 정중선 판 곡률(우측)이 맞추어지는 빗장뼈 뼈 모델을 나타낸다.
도 141은 빗장뼈 남성 및 여성 집단에 대한 상부 외측 판 클러스터를 나타내는 도표이며, 표 1은 이에 관련한 데이터를 포함한다.
도 142는 본 개시 내용에 따라 전측 중간-축 7h 판(좌측), 판 정중선 곡선(중앙), 및 단일의 곡률 반경을 나타내는 정중선 판 곡률(우측)이 맞추어지는 빗장뼈 뼈 모델을 나타낸다.
도 143은 빗장뼈 남성 및 여성 집단에 대한 전측 중간-축7h 판 클러스터를 나타내는 도표이며, 표 2은 이에 관련한 데이터를 포함한다.
도 144는 본 개시 내용에 따라 상측 중간-축 판(좌측), 판 정중선 곡선(중앙), 및 상이한 곡률 반경을 나타내는 정중선 판 곡률(우측)이 맞추어지는 빗장뼈 뼈 모델을 나타낸다.
도 145는 빗장뼈 남성 및 여성 집단에 대한 상측 중간-축 판 클러스터를 나타내는 도표이며, 표 3은 이에 관련한 데이터를 포함한다.
도 146은 본 개시 내용에 따라 전측 외측 판(좌측), 판 정중선 곡선(중앙), 및 상이한 곡률 반경을 나타내는 정중선 판 곡률(우측)이 맞추어지는 빗장뼈 뼈 모델을 나타낸다.
도 147은 빗장뼈 남성 및 여성 집단에 대한 전측 외측 판 클러스터를 나타내는 도표이며, 표 4는 이에 관련한 데이터를 포함한다.
도 148은 본 개시 내용에 따라 전측 중간-축 길이가 긴 판(좌측), 판 정중선 곡선(중앙), 및 상이한 곡률 반경을 나타내는 정중선 판 곡률(우측)이 맞추어지는 빗장뼈 뼈 모델을 나타낸다.
도 149는 빗장뼈 남성 및 여성 집단에 대한 전측 중간-축 판 클러스터를 나타내는 도표이며, 표 5는 이에 관련한 데이터를 포함한다.
도 150은 본 개시 내용에 따라 외상 재건 수술을 위하여 맞춤형 판 배치 가이드를 제작하기 위한 예시적인 프로세스 흐름도이다.
도 151은 본 개시 내용에 따라 뼈 이식을 이용한 재건 수술을 위하여 맞춤형 절단 및 배치 가이드를 제작하기 위한 예시적인 프로세스 흐름도이다.
도 152는 본 개시 내용에 따라 외상 판 템플릿 및 배치 도구를 제작하기 위한 예시적인 프로세스 흐름도이다.
도 153은 본 개시 내용에 따라 엉덩이 수정 케이지 템플릿 및 배치 도구를 제작하기 위한 예시적인 프로세스 흐름도이다.
도 154는 본 개시 내용에 따라 관성 측정 장치를 이용하여 연조직 및 인체 해부학적 구조의 운동학적 추적을 위한 예시적인 프로세스 흐름도이다.
도 155는 본 개시 내용에 따라 뼈 모델 상의 연조직 위치를 명시하고 연조직 변형을 추적하는 운동학적 소프트웨어 인터페이스를 나타내는 한 쌍의 스크린숏으로 이루어진다.
도 156은 대퇴골, 경골, 및 종아리뼈의 뼈 모델로 이루어지며, 인대(MCL, LCL)가 부착된 각각의 뼈 모델 상에 포인트가 표시되고, 상기 포인트는 인대 부착의 가능성이 보다 높거나 낮음를 명시하기 위하여 칼라코드화된다.
도 157은 원위 대퇴골의 뼈 모델로 이루어지며, 인대(ACL, PCL)가 부착된 각각의 뼈 모델 상에 포인트가 표시되고, 상기 포인트는 인대 부착의 가능성이 보다 높거나 낮음를 명시하기 위하여 칼라코드화된다.
도 158은 근위 경골의 뼈 모델로 이루어지며, 인대(ACL, PCL)가 부착된 각각의 뼈 모델 상에 포인트가 표시되고, 상기 포인트는 인대 부착의 가능성이 보다 높거나 낮음를 명시하기 위하여 칼라코드화된다.
도 159는 본 개시 내용에 따라 인대부착을 포함하는 슬관절의 3D 가상 모델의 정면도, 후면도 및 2개의 측면도를 나타낸다.
도 160은 도 159의 전체적으로 조립된 슬관절 모델의 운동학적 움직임을 모델링하기 위하여 형광투시법 영상을 이용하는 것을 나타낸다.
도 161은 본 개시 내용에 따라 인체축의 실시간 추적을 반영하는 원위 대퇴골 뼈 모델 및 근위 경골 뼈 모델의 도면이다.
도 162는 다양한 움직임 및 헬리컬 축의 재건을 통한 슬관절 모델을 포함한다.
도 163은 상기 관상면에서 상기 인체축을 나타내는 슬관절 뼈 모델을 포함한다.
도 164는 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 165는 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 166은 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 167은 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 168은 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 169는본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 170은 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 171은 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 172는 본 개시 내용에 따라 움직임 데이터를 기록하기 위하여 관성 측정 장치를 이용하는 슬관절 임상 검사에 대한 예시적인 도해이다.
도 173은 일련의 사진을 포함하며, 그 중 첫 번째 것은 한 쌍의 관성 측정 장치(IMU) 패키지를 착용한 환자를 나타내고, 두 번째 것은 개별적인 IMU에 대한 상기 IMU 패키지의 상대적인 크기를 나타내고, 세 번째 것은 미국 통화 쿼터(동전)에 대한 개별적인 IMU의 상대적인 크기를 나타낸다.
도 174는 본 개시 내용에 따른 사용자 인터페이스의 스크린숏으로, 상기 환자의 슬관절을 다양한 움직임을 통하여 취할 때 설치 분포에 대한 피드백을 제공하기 위하여, 관성 측정 장치로부터 수신된 입력에 기초하여 동적으로 업데이트된 근위 경골 모델을 묘사한다.
도 175는 다양한 움직임을 통해 각각의 척추의 상대적인 움직임을 추적하기 위하여 LI 및 L5 척추뼈 위로 배치된 별개의 관성 측정 장치(IMU)를 나타내는, 환자의 후방, 등의 아래 부분에 대한 사진, 및 각각의 IMU가 3개의 축에 대한 움직임을 나타내는 데이터를 출력할 수 있음을 나타내는 보조 다이어그램을 나타낸다.
도 176은 상기 환자가 다양한 움직임을 통해 움직이는 동안의 도 175의 환자 및 IMU를 나타내는 일련의 사진으로 이루어진다.
도 177은 본 개시 내용에 따라 관성 측정 장치 데이터를 이용하여 적어도 2개의 신체 부위의 상대적인 방향을 결정하기 위한 프로세스를 나타내는 그래픽 도면이다.
도 178은 환자의 외측 구부림 활동 중에 상기 척추(특히 LI, L5)에 해당하는 인체축의 방향에 있어서의 절대 변화를 나타내는 한 쌍의 플롯으로 이루어지며, 여기에서 상기 "(A)" 데이터 플롯은 건강한 환자를 나타내며, 상기 "(B)" 데이터 플롯은 척추 퇴화를 보이는 환자를 나타낸다.
도 179는 한 쌍의 영상으로 이루어지며, 하나는 근위 경골의 상면도이고, 두 번째 것은 상기 근위 경골의 입면도로서 사시도이고, 경골 임플란트 요소의 적절한 방향 및 위치를 보장하기 위하여 IMU를 정상화하는 데에 이용되는 수술용 네비게이션 도구와 함께 도시된다.
도 180은 본 개시 내용에 따른 예시적인 관성 측정 장치 캘리브레이션 장치의 입면도로서 사시도이다.
도 181은 캘리브레이션 이전에 관성 측정 장치로부터 출력된 데이터로부터 발생된 국소 자기장 맵(등각뷰, 정면도, 및 상면도) (상부의 일련의 3개 플롯은 타원체에 유사한다), 및 캘리브레이션 이전에 관성 측정 장치로부터 출력된 데이터로부터 발생된 국소 자기장 맵(등각뷰, 정면도, 및 상면도)(하부의 일련의 3개 플롯은 구(球)와 유사하다)을 나타낸다.
도 182는 관성 측정 장치(A)와 관련된 자력계의 예시적인 위치를 나타내는 일련의 다이어그램으로 이루어지며, 상기 자력계로부터 검출된 자기장이 반영해야 하는 것은 정상화되었다면 왜곡(들)(B)에 대해 확인되어야 하며 정상화가 수행되지 않았다면 상기 자력계에 따른 상기 자기장의 국소적 왜곡의 결과에 대해 확인되어야 한다.
도 183은 관성 측정 장치 프로세서로 하여금 상기 IMU가 장착된 상기 수술용 공구를 지능적으로 식별할 수 있도록 각각 고유의 상부 표면을 갖는 다양한 수술용 공구에 대한 일련의 영상이다.
도 184는 IMU 하우징을 나타내는 개요 도면이며 도 183의 영상 중 하나와 상기 IMU 하우징의 하부 캐비티 사이의 상호작용을 나타낸다.
도 185는, 본 개시 내용에 따라, 상박골 근위부를 준비하고, 관성 측정 장치를 이용함으로써 어깨 재배치 과정의 일부로서 상박골 요소를 임플란트하는 것에 대한 예시적인 프로세스 흐름도이다.
도 186은, 본 개시 내용에 따라, 견갑골 소켓을 준비하고, 관성 측정 장치를 이용함으로써 어깨 재배치 과정의 일부로서 관절와 컵을 임플란트하는 것에 대한 예시적인 프로세스 흐름도이다.
도 187은, 본 개시 내용에 따라, 상박골 근위부를 준비하고, 관성 측정 장치를 이용함으로써 반대 어깨 재배치 과정의 일부로서 상박골 요소를 임플란트하는 것에 대한 예시적인 프로세스 흐름도이다.
도 188은, 본 개시 내용에 따라, 견갑골 소켓을 준비하고, 관성 측정 장치를 이용함으로써 반대 어깨 재배치 과정의 일부로서 관절와 볼을 임플란트하는 것에 대한 예시적인 프로세스 흐름도이다.
[발명을 실시하기 위한 구체적인 내용]
본 개시의 예시적인 실시 예는 뼈 및 생체조직 재건, 환자-맞춤형 및 대량 맞춤형 정형외과용 임플란트, 성별 및 민족성에 따른 맞춤형 정형외과용 임플란트, 절단 가이드, 외상 판, 뼈 이식편 절단 및 배치 가이드, 및 환자-맞춤형 기구를 포함하여, 다양한 정형외과용 양상을 포괄하도록 아래에 설명 및 도시된다. 물론, 후술되는 실시 예는 사실상 예시적인 것으로 본 발명의 범위 및 요지로부터 벗어남 없이 변경 가능함은 당업자에게 명백하다. 그러나, 명백함 및 정확함을 위하여, 아래에 설명된 바의 예시적인 실시 예는 본 발명의 범위에 속하는 데에 필요 없는 것으로 인정되는 선택적인 단계, 방법, 및 특징을 포함할 수 있다.
전체 인체 재건
도 1-8을 참조하면, 기형적인 인체 또는 부분적인 인체의 재건은 의료인이 직면하는 복잡한 문제 중 하나이다. 인체의 손실은 출생 조건, 종양, 질병, 개인 상해, 또는 이전 수술의 실패로부터 기인할 수 있다. 다양한 질병에 대하여 치료를 제공하는 것의 일부로, 의료인은 파손되고/부서진 뼈, 뼈 변성, 정형외과용 임플란트 수정, 관절 변성, 및 주문형 기계장치 설계에 제한되지 않고 이를 포함하는 다양한 조건에 대하여 치료를 용이하게 하는 데에 인체를 재건하거나 또는 인체를 구성하는 것이 유익하다는 것을 알 수 있다. 예를 들어, 종래기술의 엉덩이 재건 해결책은, 도 15 - 도 19에 나타낸 바와 같이, 자연적으로 발생되는 비대칭으로 인하여 건강한 인체를 정확하게 반영할 수 부재하는 건강한 환자 인체에 대해 미러링을 요한다.
본 개시는 뼈 및 생체조직 재건에 대한 시스템 및 방법을 제공한다. 이러한 재건을 수행하기 위하여, 상기 시스템 및 관련 방법은 1명 이상의 사람을 대표하는 인체 영상을 이용한다. 이들 영상은 적당한 당해 인체를 모방하는 가상의 3차원적(3D) 생체조직 모델 또는 일련의 가상의 3D 생체조직 모델을 제작하기 위하여 처리된다.
그 후, 상기 시스템 및 관련 방법은 재건 수술에 사용될 금형 및/또는 기타 장치(예를 들면, 고정 장치, 이식 장치, 환자-맞춤형 임플란트, 환자-맞춤형 수술 가이드)를 제작하기 위하여 이용된다.
도 1에 나타낸 바와 같이, 상기 예시적인 시스템 흐름의 개요는 인체를 나타내는 입력 데이터의 수신으로부터 시작된다. 이러한 인체는 유전자로부터 기인한 생체조직 변성 또는 생체조직 부재의 경우 부분적인 인체로 이루어질 수 있고, 또는 이러한 인체는 유전자 또는 환경 조건으로부터 기인한 기형적인 인체로 이루어질 수 있고, 또는 이러한 인체는 하나 이상의 인체 파손으로부터 기인하는 부서진 생체조직으로 이루어질 수 있다. 입력된 인체 데이터는, 예를 들면, 표면 모델 또는 포인트 클라우드의 형태로 될 수 있는, 당해 인체의 2차원적(2D) 영상 또는 3차원적(3D) 표면 표시로 이루어진다. 2D 영상이 이용되는 경우, 이들 2D 영상은 당해 인체의 3D 가상 표면 표시를 구성하는 데에 이용된다. 당업자는 3D 표면 표시를 구성하기 위하여 인체의 2D 영상을 이용하는 데에 익숙하다. 따라서, 이러한 과정에 대한 상세한 설명은 간결성을 도모하기 위하여 생략된다. 예를 들어, 입력된 인체 데이터는 하나 이상의 X-선, 컴퓨터 단층촬영(CT) 스캔, 자기 공명 영상(MRI), 또는 기타 영상화 데이터로 이루어질 수 있고, 이들로부터 당해 생체조직의 3D 표면 표시의 제작이 가능하다.
도 50 및 표 I을 참조하면, 가상의 3D 뼈 모델을 구성하는 데에 이용되는 X-선 영상의 맥락에서, 이미지화 과정 중에 뼈 회전이 상기 모델을 정확히 구성하는 데에 있어서 중요한 역할을 수행한다는 것이 발견되었다. 달리 말하자면, 영상 간에 뼈 회전이 발생된 상황에서 X-선 영상을 컴파일링하려 하면, 상기 X-선 영상은 이러한 뼈 회전을 고려하여 표준화되어야 한다.
예를 들어, 대퇴골 근위부의 맥락에서, 6 및 15도의 뼈 회전은 X-선 영상으로부터 추출된 치수에 중요한 변화를 초래한다는 것을 발견하였다. 예를 들어, 이들 치수는, 제한 없이, 근위부 각도, 헤드 오프셋, 및 골수강 폭을 포함한다. 표 I에 반영된 바와 같이, 0도(즉, 초기 X-선에 의하여 설정된 시작점)에서 X-선 이미지화된 동일한 대퇴골에 대하여, 6도의 회전 및 15도의 회전은 화소를 이용하여 측정된 근위부 각도, 헤드 오프셋, 및 골수강 폭에 있어서 차이를 보였고, 여기에서 각각의 화소 크기는 대략 0.29 밀리미터였다. 헤드 오프셋과 마찬가지로, 특히, 근위부 각도는 회전이 증가됨에 따라 증가되었고, 골수내 폭은 그렇지 않았다. 이러한 예시적인 표에서, 3개 가로방향 평면은 길이방향 축을 따라 서로 이격되었고, 여기에서 각각의 평면은 골수강의 폭이 측정된 위치에 상응한다. 표 I에 반영된 바와 같이, 동일한 위치에 대한 골수강의 폭은 회전 각도에 따라 변화된다. 따라서, 이하에서 더욱 상세히 설명하는 바와 같이, 뼈의 3D 가상 모델을 X-선을 이용하여 구성할 때, 이미지화 중에 뼈 회전의 범위로 하나의 회전변위를 고려해야 한다.
그러나, 이상은 예시적인 시스템 및 방법과 함께 이용 가능한 인체에 대한 예시적인 설명이고, 그러므로, 개시된 방법에 따른 본 시스템에 기타의 인체를 이용하는 것을 제한할 의도로 이루어진 것이 아님을 이해해야 한다. 여기에서 이용된 바, 생체조직은 뼈, 근육, 인대, 힘줄, 및 다세포 생물에서 특정 기능으로 갖는 기타 명백한 종류의 구조적 물질을 포함한다. 따라서, 상기 예시적인 시스템 및 방법이 뼈의 문맥에서 논의될 때, 당업자는 상기 시스템 및 방법이 기타의 생체조직에도 적용 가능함을 이해해야 한다.
다시 도 1을 참조하면, 상기 시스템에 대한 인체 데이터 입력은 3개 모듈에 대하여 이루어지며, 그 중 2개는 상기 인체 데이터의 처리(전체 뼈 재건 모듈, 환자-맞춤형 모듈)를 수반하고, 반면에 제 3의 것(비정상 데이터베이스 모듈)은 데이터베이스의 일부로서 상기 인체 데이터를 목록화한다. 상기 처리 모듈 중 제 1의 모듈로서, 상기 전체 뼈 재건 모듈은 당해 뼈(들)의 가상의 3D 모델을 제작하기 위하여 상기 스태티스티컬 아틀라스 모듈로부터 수신한 데이터로써 상기 입력된 인체 데이터를 처리한다. 이러한 3D 모델은 상기 당해 뼈(들)의 전체적인, 정상적인 재건이다. 상기 처리 모듈 중 제 2 의 모듈로서, 상기 환자-맞춤형 모듈은, 하나 이상의 최종 정형외과용 임플란트에 더하여, 하나 이상의 금형, 고정 시스템, 이식편 성형 도구, 및 랜더링을 제작하기 위하여 상기 전체 뼈 재건 모듈로부터 수신한 데이터로써 상기 입력된 인체 데이터를 처리한다. 랜더링은 예상되는 수술결과에 대한 피드백을 위하여 재건된 인체를 시각화함을 칭한다. 더욱 구체적으로, 상기 환자-맞춤형 모듈은, 환자의 인체가 정상에서 심하게 벗어남에도 불구하고, 환자-맞춤형 인체가 정밀하게 맞도록 설계된, 완전히 맞춤화된 장치를 제작하도록 조정된다. 더욱이, 상기 환자-맞춤형 모듈은 인체 부위 및 장치 설계 파라미터에 대한 특징(예를 들면, 맞춤 부위 및/또는 형상)을 자동으로 명시하기 위하여 상기 전체 뼈 재건 모듈로부터 상기 가상의 3D 재건된 뼈 모델을 이용한다. 이러한 방식으로, 환자-맞춤형 데이터는 설계 파라미터를 정의하는 데에 이용되어 그 출력 장치 및 임의의 임플란트가 상기 환자의 특이적 인체에 정밀하게 맞게 된다. 상기 환자-맞춤형 모듈의 예시적인 이용은 아래에 더욱 상세히 설명된다. 상기 시스템의 기능 및 처리를 더욱 상세히 이해하기 위하여, 상기 스태티스티컬 아틀라스 모듈로 시작되는 상기 시스템의 모듈에 대해 아래에 설명한다.
도 1 및 도 2에 나타낸 바와 같이, 상기 스태티스티컬 아틀라스 모듈은 특정 집단에서 고유한 해부학적 변동성을 포착하기 위하여 하나 이상의 인체(예를 들면, 뼈)에 대한 가상, 3D 모델을 기록한다(log). 예시적인 형태에서, 상기 아틀라스는 평균 표상으로 나타나는 상기 하나 이상의 인체의 인체 특징에 대한 수학적 표현 및 상기 평균 표상에 대한 변화를 기록한다. 상기 인체 특징을 수학적 표현으로서 나타냄으로써, 상기 스태티스티컬 아틀라스는 인체의 측정 자동화를 가능케 하고, 이하에서 더욱 상세히 설명하는 바와 같이, 결손 인체의 재건을 가능케 한다.
공통적인 인체에 걸쳐 인체 변화를 추출하기 위하여, 입력된 인체 데이터는 집단 전체에 걸쳐 공통 참조 프레임에 비교된다, 공통적으로 템플릿 3D 모델 또는 인체 3D 템플릿 모델로 칭함. 이러한 템플릿 3D 모델은 회전가능하고 그밖에 시각적으로 조작 가능한 3D 모델로서 그래픽 디스플레이 상에 시각적으로 나타내어지나, 이는 당해 생체조직에 대하여 스태티스티컬 아틀라스 전체에 걸쳐 모든 인체에 대한 인체 표면 특징/표현의 수학적 표현(즉, 특정 뼈에 대하여 상기 템플릿 3D 모델로부터 제작된 스태티스티컬 아틀라스의 집단 전체에 걸쳐 공유되는 상기 뼈의 모든 특성)으로 이루어진다. 상기 템플릿 3D 모델은 다중 인체 표상 또는 단일의 대표사례의 조합으로 될 수 있고 상기 스태티스티컬 아틀라스의 최저 엔트로피 상태를 나타낼 수 있다. 상기 스태티스티컬 아틀라스에 추가될 각각의 인체에 대하여(즉, 입력된 인체 데이터), 인체 3D 모델이 제작되며, 상기 인체 3D 모델 및 상기 템플릿 3D 모델은 모두 표준화 과정을 거친다.
상기 표준화 과정 중에, 상기 인체 3D 모델은 상기 템플릿 3D 모델의 스케일에 대하여 표준화된다. 상기 표준화 과정은 상기 인체 3D 모델 및 상기 템플릿 3D 모델 중 하나 또는 모두가 공통적인 단위 스케일을 갖도록 하는 스케일링을 수반할 수 있다. 상기 인체 3D 모델 및 상기 템플릿 3D 모델의 표준화 이후, 상기 표준화된 인체 3D 모델 및 템플릿 3D 모델은 스케일 불변성으로 제시되므로, 형상 특징은 스케일 독립적으로 이용될 수 있다(이 경우 크기를 의미함). 표준화 종료 후, 두 3D 모델은 스케일 공간 매핑 및 특징추출 순서를 통하여 처리된다.
스케일 공간 매핑 및 특징추출은 근본적으로 다중-해상도 특징추출 과정이다. 특히, 이러한 과정은 다중 특징 스케일로 형상-특이적 특징을 추출한다. 처음에는, 다수의 인체 특징이 선택되고, 각각의 표시 특징은 상이한 스케일 공간에 나타내어진다. 그 후, 상기 선택된 인체 특징 각각의 스케일 공간 표시에 대하여, 모델 특이적 특징이 추출된다. 이들 추출된 특징은 상기 템플릿 3D 모델과 상기 인체 3D 모델 사이의 로버스트(노이즈에 대하여) 정합 파라미터를 이끌어내는 데에 이용된다. 이러한 다중-해상도 특징추출 과정에 이어서, 상기 추출된 데이터는 다중-해상도 3D 정합 과정을 통하여 처리된다.
도 2-5를 참조하면, 상기 다중-해상도 3D 정합 과정은 상기 2개의 모델을 정합하기 위하여 상기 인체 3D 모델과 템플릿 3D 모델 사이의 아핀 정합 계산을 수행하도록 상기 스케일 공간 추출된 특징을 이용한다. 특히, 상기 인체 3D 모델 및 템플릿 3D 모델은 강체 정합 과정을 통하여 처리된다. 도 5에 나타낸 바와 같이, 상기 인체 3D 모델 및 템플릿 3D 모델이 모두 동일한 공간 내에 있고 자세의 특이점이 없음을 보장하기 위하여, 이러한 강체 정합 과정은 상기 인체 3D 모델 및 템플릿 3D 모델을 정렬하도록 작동된다. 상기 3D 모델을 정렬하기 위하여, 각각의 모델에 연관된 중심점이 정렬된다. 또한, 각각의 3D 모델의 주축을 정렬하여 두 3D 모델의 주방향이 동일하게 되도록 한다. 마지막으로, 반복적인 최근접점 계산을 수행함으로써 상기 3D 모델 사이의 자세 차이를 최소화한다.
강체 정합 후, 상기 3D 모델은 유사도 정합 과정을 이용함으로써 정합된다. 이러한 과정은 상기 템플릿 3D 모델 및 상기 인체 3D 모델 모두에 대하여 상기 정상적인 스케일 특징(즉, 능선(ridges)을 가장 잘 정렬하는 상사변환(similarity transform)을 반복적으로 계산함으로써 정상적인 스케일로 상기 템플릿 3D 모델 및 상기 인체 3D 모델을 정렬하는 것을 수반한다. 상기 반복적인 유사도 정렬 알고리즘은 반복적인 최근접점의 변종이다. 각각의 반복 회전에서, 병진운동 및 스케일은 수렴까지 포인트 쌍 간에 계산된다. 2개 세트의 포인트 사이에서 쌍의 매칭 또는 관련성은 Kd-tree를 이용하여 계산된 거리 쿼리(query), 또는 기타 공간 분할 데이터 구조를 이용함으로써 평가된다. 특히, 상기 두 모델에 대한 융선은 매칭 포인트 쌍 계산 과정을 수행하는 데에 이용된다. 이러한 예시적인 설명에서, 능선은 단일의 주요 곡률이 그의 만곡선을 따라 극값을 갖는 3D 모델 상의 포인트를 칭한다. 매칭 포인트 쌍 계산 과정의 일부로서, 포인트는 서로 매칭되는 상기 3D 모델의 능선 상에서 명시된다. 다음으로, 두 3D 모델의 능선은, 회전, 병진운동, 및 스케일을 계산하며 두 모델의 능선을 가장 잘 정렬하는 상사변환 계산 과정을 거친다. 변환 포인트 과정이 이어져, 상기 계산된 회전, 병진운동, 및 스케일을 상기 템플릿 3D 모델 능선에 적용하도록 작용한다. 그 후, 각각의 매칭된 포인트 세트 사이에 평균 제곱근 오차(root mean square error) 또는 거리 오차가 계산되고, 이어서 이전 과정으로부터의 상대 제곱근 오차(relative root mean square error) 또는 거리 오차에 있어서의 변화가 계산 된다. 상대 제곱근 오차 또는 거리 오차에 있어서의 변화가 소정의의 임계치 이내이면, 최종 회전, 병진운동, 및 스케일을 상기 템플릿 3D 모델에 적용하기 위하여 변화 과정이 수행된다.
상기 유사도 정합 과정에 뒤이어 아티큘레이티드 정합 과정이 이어지며 스케일 공간 특징 과정으로부터 입력 데이터를 수신한다. 상기 스케일 공간 특징 과정에서, 특징은 상이한 스케일 공간에서 상기 템플릿 3D 모델 및 상기 인체 3D 모델로부터 추출된다. 각각의 스케일 공간은 상기 본래의 인체 3D 모델을 가우시안 평활함수로 컨볼빙함으로써 정의된다.
상기 아티큘레이티드 정합 과정의 목적은 상기 템플릿 3D 모델의 "n" 스케일 공간 특징을 상기 인체 3D 모델 상에서 계산된 "m" 스케일 공간 특징과 매칭하기 위함이다. 상기 템플릿 3D 모델 및 상기 인체 3D 모델 상에서 검출된 특징의 수 사이의 차이는 인체 변화로 인한 것이다. 이러한 검출된 특징 수의 차이는 상기 템플릿 3D 모델과 상기 인체 3D 모델 사이에 많은 관계를 유발할 수 있다. 그러므로, 양방향 상호 특징 매칭은 그러한 변화를 수용하고 모든 상호 특징 간에 정확한 매칭을 달성하도록 수행된다. 구체적으로, 특징 세트는 스케일 공간에서 상기 템플릿 3D 모델 상에서 계산된다. 이러한 예시적인 과정에서, 특징 세트는 중요한 인체 구조(예를 들면, 골반에서 비구컵, 요추에서 척추 과정)를 나타내는 포인트 세트에 연결된다. 마찬가지로, 특징 세트는 스케일 공간에서 상기 인체 3D 모델 상에서 계산된다. 매칭 특징 쌍 과정은 상기 템플릿 3D 모델 상에서 계산된 상기 특징 세트를 상기 인체 3D 모델 상의 상기 특징 세트에 형상 디스크립터(예를 들면, 곡률, 형상 인덱스, 등)를 이용하여 매칭한다. 이러한 과정의 결과는 상기 템플릿 3D 모델과 상기 인체 3D 모델 사이의 특징 세트 "n-m" 매핑이다. 필요에 따라, 상기 매칭된 특징 세트를 단일의 특징 세트에 재그룹화하기 위하여 재그룹화 과정이 수행된다(예를 들어, 비구컵이 2개의 조각으로 검출되었다면, 이러한 과정은 상기 2개의 조각을 하나의 단일 특징 세트로 재그룹화한다). 그 후, 상기 템플릿 3D 모델 및 상기 인체 3D 모델 상에서 매칭된 특징 세트에서 각각의 포인트 간의 관련성을 계산하기 위하여 계산 과정이 수행된다. 상기 템플릿 3D 모델 상의 각각의 매칭된 특징 세트를 상기 인체 3D 모델 상의 해당 특징 세트에 변환하는 상기 회전, 병진운동, 및 전단(shear)을 계산하기 위하여 아핀 계산 변환 과정이 이어진다. 그 후, 상기 템플릿 3D 모델은 상기 계산된 아핀 변환 파라미터(즉, 회전, 병진운동, 및 전단)를 이용함으로써 변환된다. 마지막으로, 상기 템플릿 3D 모델 및 상기 인체 3D 모델 상에 설정된 각각의 매칭된 특징 세트를 정렬하기 위하여 강성 정렬 과정이 수행된다.
상기 아티큘레이티드 정합 과정 및 상기 정상적인 스케일 특징 과정 이후에 이루어지는 비강체 정합 과정은 상기 템플릿 3D 모델 상의 모든 표면 정점을 상기 인체 3D 모델 상의 정점에 매칭하는 것 및 초기 관련성 계산을 수반한다. 이러한 관련성은 상기 템플릿 3D 모델 상의 각각의 정점을 상기 인체 3D 모델 상의 매칭된 포인트에로 이동시키는 변형 필드를 계산하는 데에 이용된다. 매칭은 동일한 분류 내의 정점(즉, 스케일 공간 특징 정점, 정상적인 스케일 특징 정점, 또는 비-특징 정점) 사이에서 이루어진다. 상기 정상적인 스케일 특징 과정의 맥락에서, 형상 특징은 상기 본래의 입력 모델을 의미하는 상기 본래의 스케일 공간(능선)에서 상기 템플릿 3D 모델 및 상기 인체 3D 모델 상에서 계산된다.
구체적으로, 상기 비강체 정합 과정의 일부로서, 상기 스케일 공간 특징은 상기 템플릿 3D 모델(TMssf) 상에서 그리고 상기 인체 3D 모델(NMssf) 상에서 계산된다. 상기 템플릿 3D 모델 상의 특징 그리고 상기 인체 3D 모델 상의 특징 각각의 세트는 "k" 이웃 포인트를 이용함으로써 성장된다. 정렬 과정은 상기 템플릿 3D 모델 스케일 공간 특징이 상기 인체 3D 모델 상에서 그의 해당 특징에 매칭되도록 상기 템플릿 3D 모델 스케일 공간 특징에 적용된다. 참조(X) 및 이동(Y)의 2개의 포인트 클라우드가 부여되는데, 그 목적은 최소 상대 제곱근 오차 및 최대 각도 임계치의 제약 하에서 전반적인 오차 척도를 최소화하도록 상기 2개의 포인트 클라우드를 반복적으로 정렬하기 위한 것이다. 재정렬 과정은 상기 템플릿 3D 모델 상의 특징 세트를 상기 인체 3D 모델 상의 매칭 세트에 맞추어 조정하기 위하여 정상적인 스케일에서 반복적인 최근접점을 이용하여 수행된다. 재정렬 후, 상기 인체 3D 모델 상에 매칭된 특징 세트와 상기 템플릿 3D 모델 상의 각각의 특징 세트에서 포인트 간의 포인트 관련성이 계산된다. 상기 인체 3D 모델 상의 매칭된 포인트는 상기 템플릿 3D 모델 포인트에 가까운 표면 법선 방향을 갖도록 되어야 한다. 그 출력은 상기 변형 필드 계산 단계에 보내진다.
상기 스케일 공간 특징 계산 과정에 병행하여, 템플릿 3D 모델(TMnfp) 및 인체 3D 모델(NMnfp) 비-특징 포인트, 또는 스케일 공간 특징이나 정상적인 스케일 특징에 속하지 않는 상기 템플릿 3D 모델 표면 상의 나머지 포인트 세트는 상기 템플릿 3D 모델 상의 비-특징 포인트와 상기 인체 3D 모델 상의 비-특징 포인트 사이의 포인트 관련성을 계산하기 위한 관련성 계산에 따라 처리된다. 상기 새로운 모델 상에서 매칭된 포인트(들)은 상기 템플릿 모델 포인트에 가까운 표면 법선 방향을 갖도록 되어야 한다. 그 출력 상기 변형 필드 계산 단계에 보내진다.
마찬가지로 상기 스케일 공간 특징 계산 과정에 병행하여, 상기 템플릿 3D 모델(TM nsf) 상의정상적인 스케일 특징(즉, 능선)은 AICP를 이용하여 상기 인체 3D 모델(NM nsf) 상의 정상적인 스케일 특징(즉, 능선)에 맞추어 조정된다. AICP는 상기 반복적인 최근접점 계산의 변종으로서, 매칭된 포인트 세트 사이에 각각의 반복 병진운동, 회전, 및 스케일이 계산된다. 상기 정렬 과정 이후에, 관련성 과정이 수행된다.
스케일 공간 특징 계산 과정, 상기 관련성 과정, 및 상기 정렬 과정으로부터의 출력은 변형 과정을 거치게 되며, 여기에서 상기 템플릿 3D 모델 상의 각각의 포인트를 상기 인체 3D 모델 상의 그의 매칭된 포인트에로 이동시키기 위하여 상기 변형 필드가 계산된다.
상기 비강체 정합 과정의 출력은, 상기 다중-해상도 정합 단계 이후, 상기 템플릿 3D 모델 메시(mesh)의 정점을 상기 인체 3D 모델의 표면에 가깝게 이동시키기 위하여 그리고 상기 출력 모델을 평활화하기 위하여 이완 과정을 거친다. 특히, 정상적인 공간(TM ns)에서의 상기 템플릿 3D 모델 및 정상적인 공간(NM ns)의 상기 인체 3D 모델은 템플릿 3D 모델에서 상기 인체 3D 모델에 가장 가까운 정점을 계산하기 위하여 관련성 계산에 의하여 정상적인 제한된 구형 검색 알고리즘을 이용함으로써 처리된다. 두 모델에 대하여 가장 가까운 정점을 이용하는 이러한 계산은, 상기 템플릿 3D 모델에서의 각각의 정점으로부터 그리고 인체 3D 모델에서 그의 매칭된 정점으로부터 관련성 벡터를 발생시키며, 이는 상기 인체 3D 모델로부터 하나 이상의 매칭 포인트를 야기할 수 있다. 상기 템플릿 3D 모델 상의 각각의 정점에 대하여 매칭된 포인트를 이용함으로써, 상기 포인트 및 매칭된 포인트로부터의 유클리드 거리에 기초하여 상기 인체 3D 모델 상의 매칭된 포인트의 가중 평균이 계산된다. 이때에, 상기 계산된 가중 평균 거리를 이용함으로써 템플릿 3D 모델 상에서 각각의 포인트를 이동시키기 위하여, 상기 템플릿 3D 모델은 상기 가중 평균을 이용하여 업데이트된다. 상기 가중치 계산 과정 이후, 템플릿 모델 상의 모든 포인트에 대하여 상기 인체 3D 모델 표면 상에서 가장 가까운 포인트를 찾기 위하여 그리고 이를 그 포인트로 이동시키기 위하여 이완 과정이 수행된다. 마지막으로, 노이즈를 제거하기 위하여 상기 변형된 템플릿 3D 모델에 평활화 작동이 수행된다. 그 결과로 정합된 3D 모델(즉, 템플릿 및 인체 3D 모델)은 자유 형태 변형 과정을 거친다.
상기 자유 형태 변형 과정은 상기 템플릿 3D 모델의 표면 상기 인체 3D 모델의 표면으로 모핑한다. 더욱 구체적으로, 상기 템플릿 3D 모델의 표면은 상기 템플릿 3D 모델 표면 및 상기 인체 3D 모델 표면 모두에 상호 매칭된 포인트를 이용함으로써 가중치 포인트-대-포인트 기반으로 반복적으로 이동된다.
도 2 및 도 6을 참조하면, 상기 자유 형태 변형 과정 이후, 상기 인체 3D 모델은 상기 인체 3D 모델과 상기 모핑된 템플릿 3D 모델 사이의 편차를 결정하기 위하여 관련성 계산 과정을 거친다. 이러한 관련성 계산 과정은, 상기 템플릿 변형된 3D 모델 및 상기 변형된 인체 3D 모델에서 선택된 표식자 위치의 최종 매칭을 수행하기 위하여, 상기 자유 형태 변형 단계로부터의 상기 템플릿 3D 모델을 다듬는다. 이러한 방식으로, 상기 관련성 계산 과정은 상기 3D 모델 사이의 크기 및 형상의 변화를 계산 및 기록하며, 이는 상기 평균 모델에 대한 편차로서 기록된다. 이러한 관련성 계산 과정의 출력은 표준화된 인체 3D 모델과 상기 인체 3D 모델에서의 변화를 고려하여 업데이트된 수정된 템플릿 3D 모델과의 합이다. 달리 말하자면, 도 2에 개략적으로 나타낸 과정의 출력은, 전체 인체 재건(예를 들면, 전체 뼈 재건)을 용이하게 하기 위하여, 상기 수정된 템플릿 3D 모델과 일치하는 특성(예를 들면, 포인트 관련성)을 갖도록 수정된 표준화된 인체 3D 모델이다.
도 1 및 도 7을 참조하면, 상기 스태티스티컬 아틀라스 모듈 및 인체 데이터로부터의 입력은 전체 인체 재건 모듈로 보내진다. 예를 들어, 당해 인체는 뼈 또는 다중 뼈로 될 수 있다. 그러나, 여기에 설명된 상기 예시적인 하드웨어, 과정, 및 기술을 이용함으로써 뼈가 아닌 인체가 재건될 수도 있음을 이해해야 한다. 예시적인 형태에서, 상기 전체 인체 재건 모듈은 부분적이거나, 기형이거나, 또는 부서진 골반에 대한 입력 데이터를 수신할 수 있다. 입력된 인체 데이터는 당해 인체의 2차원적(2D) 영상 또는 3차원적(3D) 표면 표시로 이루어질 수 있고, 이는, 예를 들어, 표면 모델 또는 포인트 클라우드의 형태로 될 수 있다. 2D 영상이 이용되는 경우, 이들 2D 영상은 당해 인체의 3D 표면 표시를 구성하기 위하여 이용된다. 당업자는 3D 표면 표시를 구성하기 위하여 인체의 2D 영상을 이용하는 데에 익숙하다. 따라서, 이러한 과정에 대한 상세한 설명은 간결성을 도모하기 위하여 생략된다. 예를 들어, 입력된 인체 데이터는 하나 이상의 X-선, 컴퓨터 단층촬영(CT) 스캔, 자기 공명 영상(MRI), 또는 3D 표면 표시의 제작이 가능한 기타 영상화 데이터로 이루어질 수 있다. 이하에서 더욱 상세히 설명하는 바와 같이, 이러한 입력된 인체 데이터는: (1) 상기 가장 가까운 스태티스티컬 아틀라스 3D 뼈 모델을 명시하기 위한 시작 포인트; (2) 1 세트의 3D 표면 정점을 이용하는 정합; 그리고, (3) 재건 출력의 최종 이완 단계에, 제한 없이, 사용될 수 있다.
도 7에 나타낸 바와 같이, 상기 입력된 인체 데이터(예를 들면, 환자의 뼈 모델)는 상기 스태티스티컬 아틀라스에서 당해 환자의 인체에 가장 가깝게 닮은 인체 모델(예를 들면, 뼈 모델)을 명시하기 위하여 이용된다. 이러한 단계는 상기 아틀라스에서 가장 가까운 뼈를 찾는 것으로 도 3에 도시된다. 상기 환자의 뼈 모델과 가장 가깝게 닮은 뼈 모델을 상기 스태티스티컬 아틀라스에서 초기에 명시하기 위하여, 상기 환자의 뼈 모델은 하나 이상의 유사도 매트릭스를 이용함으로써 상기 스태티스티컬 아틀라스에서 상기 뼈 모델과 비교된다. 상기 초기 유사도 매트릭스의 결과는 후속의 정합 단계에서 "초기 추측"으로서 이용되는 상기 스태티스티컬 아틀라스로부터의 뼈 모델의 선택이다. 상기 정합 단계는 상기 환자 뼈 모델을 상기 선택된 아틀라스 뼈 모델(즉, 상기 초기 추측 뼈 모델)과 정합하므로 그 출력은 상기 아틀라스 뼈 모델에 맞추어 조정되는 환자 뼈 모델이다. 상기 정합 단계에 이어서, 정렬된 "초기 추측"에 대한 형상 파라미터는 상기 형상이 상기 환자 뼈 형상에 매칭되도록 최적화된다.
형상 파라미터, 이 경우 상기 스태티스티컬 아틀라스로부터의 형상 파라미터는 최적화되어, 비-기형 또는 기존의 뼈의 상기 부위는 상기 재건 및 환자 뼈 모델 사이의 오차를 최소화하는 데에 이용된다. 형상 파라미터 값의 변화는 상이한 인체 형상의 표현을 가능하게 한다. 이러한 과정은 상기 재건된 형상의 수렴이 달성될 때까지(반복 사이의 상대적인 표면 변화로서 또는 허용된 최대 반복수로서 측정가능) 상이한 스케일 공간에서 반복된다.
이완 단계는 상기 본래의 환자 3D 생체조직 모델에 가장 잘 매칭되도록 상기 최적화된 생체조직을 모핑하기 위하여 수행된다. 상기 예시적인 경우에 일치하게, 상기 수렴 단계로부터 출력되는 상기 재건된 골반 모델의 결손 인체는 상기 환자-맞춤형 3D 골반 모델에 적용되어, 상기 환자의 재건된 골반의 환자-맞춤형 3D 모델이 제작된다. 더욱 구체적으로, 상기 재건된 골반 모델 상의 표면 포인트는 상기 재건된 형상이 상기 환자-맞춤형 형상에 가장 잘 매칭되도록 상기 환자-맞춤형 3D 골반 모델 상에서 직접적으로 이완된다(즉 모핑된다). 이러한 단계의 출력은, 상기 환자의 정상적인/완전한 인체가 어떠해야 하는 지를 나타내는, 전체적으로 재건된, 환자-맞춤형 3D 생체조직 모델이다.
도 1을 참조하면, 상기 비정상 데이터베이스는 데이터 입력으로서 이용되며 상기 결함 분류 모듈에 대한 트레이닝에 이용된다. 특히, 상기 비정상 데이터베이스는, 인체 표면 표시 및 관련 임상 및 인구통계학적 데이터를 포함하는 비정상적인 인체 특징에 대하여 특이적인 데이터를 포함한다.
도 1 및 도 8을 참조하면, 상기 정상적인/완전한 생체조직을 나타내는 상기 전체적으로 재건된, 환자-맞춤형 3D 생체조직 모델 및 비정상적인/불완전한 생체조직을 나타내는 입력된 인체 데이터(즉, 그로부터 3D 표면 표시를 제작할 수 있는 3D 표면 표시 또는 데이터)는 상기 결함 분류 모듈에 입력된다. 상기 비정상 데이터베이스로부터의 이러한 인체 데이터는 유전자로부터 기인한 생체조직 변성 또는 생체조직 부재의 경우에 부분적인 인체로 될 수 있고, 또는 이러한 인체는 유전자 또는 환경 조건(예를 들면, 외과적 교정, 질병, 등)으로부터 기인한 기형적인 인체로 될 수 있고, 또는 이러한 인체는 하나 이상의 인체 파손으로부터 기인한 부서진 생체조직으로 될 수 있다. 예를 들어, 입력된 인체 데이터는 하나 이상의 X-선, 컴퓨터 단층촬영(CT) 스캔, 자기 공명 영상(MRI), 또는 3D 표면 표시의 제작이 가능한 기타 임의의 영상화 데이터로 이루어질 수 있다.
상기 결함 분류 모듈은 정량적 결함 분류 시스템을 제작하기 위하여 당해 인체의 정상적인 3D 표상과 결합된 비정상 데이터베이스로부터 다수의 비정상적인 3D 표면 표시를 이끌어낸다. 이러한 결함 분류 시스템은 각각의 결함 유형 또는 클러스터의 "템플릿"을 제작하기 위하여 이용된다. 더 일반적으로, 상기 결함 분류 모듈은, 이들 결함을 다루는 의료 해결책의 제작을 용이하게 하기 위하여, 인체 결함을 긴밀하게 관련된 결함으로 구성된 유형으로 분류한다(형상, 임상, 외형, 또는 기타 특성과 유사한 것들을 참조하여). 본 결함 분류 모듈은 상기 결함을 자동으로 분류하기 위하여 수술 전의 데이터와 수술중의 관찰자 시각화 사이의 불일치를 제거 또는 감소시키는 수단으로서 소프트웨어 및 하드웨어를 이용한다. 전통적으로, 필요한 인체 재건의 범위를 정량적으로 분석하기 위한 수단으로서 수술 전의 방사선 사진이 이용되었으나, 이는 기껏해야 주먹구구식인 수술 전의 계획을 야기하였다. 현재, 수술중의 관찰자는 인체 결함의 범위를 최종 결정하고 방사선 사진에 의존한 수술 전 계획이 결함이 있거나 또는 불완전함을 여러 차례 결론 내린다. 결과적으로, 본 결함 분류 모듈은 결함 분류에 관련하여 측정자간 및 측정자내 변화를 감소시킴으로써 그리고 새로운 결함 사례를 분류하기 위하여 정량적 매트릭스를 제공함으로써 현 분류 시스템을 개선한다.
상기 결함 분류 모듈의 일부로서, 상기 모듈은 입력 초기 상태로서 이용되는 하나 이상의 분류 유형으로 취할 수 있다. 예를 들어, 골반의 맥락에서, 상기 결함 분류 모듈은 상기 북미정형외과학회(American Academy of Orthopedic 외과의s AAOS)(D'Antonio 외) 뼈 결함 분류 구조에 상응하는 입력 결함 특징으로서 이용될 수 있다. 이러한 구조는 다음의 4가지 상이한 유형을 포함한다: (1) 유형 I, 분절 뼈 손실에 해당; (2) 유형 II, 공동성 뼈 손실에 해당; (3) 유형 III, 분절 및 공동성 뼈 손실에 해당; 그리고, (4) 유형 IV, 골반 불연속성에 해당. 양자택일적으로, 상기 결함 분류 모듈은, 도 10에서 골반에 대하여 나타낸 바와 같이, 상기 Paprosky 뼈 결함 분류 구조로 프로그램될 수 있다. 양자택일적으로, 상기 결함 분류 모듈은 Paprosky 뼈 결함 분류 구조로 프로그램화될 수 있다. 이러한 구조는 다음의 3가지 상이한 유형을 포함한다: (1) 유형 I, 뼈 용해가 부재하는 지지 경계(rim)에 해당; (2) 유형 II, 온전한 지지 기둥 및 2 센티미터 미만의 내상방 또는 측방 이동을 갖는 왜곡된 반구체에 해당; 그리고, (3) 유형 III, 2 센티미터 이상의 상방 이동 및 파손되거나 또는 온전한 콜러 라인(Kohler's line)을 갖는 심각한 좌골 용해(ischial lysis)에 해당. 더욱이, 상기 결함 분류 모듈은 수정된 Paprosky 뼈 결함 분류 구조로 프로그램화될 수 있다. 이러한 구조는 다음의 6가지 상이한 유형을 포함한다: (1) 유형 1, 요소 이동이 부재하는 지지 경계에 해당; (2) 유형 2A, 3 센티미터 미만의 상방 이동된 왜곡된 반구체에 해당; (3) 유형 2B, 1/3미만의 경계 둘레를 갖는 보다 큰 반구체 왜곡에 해당, 그리고 상기 반구형 지붕이 지지가 됨; (4) 유형 2C, 온전한 경계에 해당, 콜러 라인에 내측 이동, 그리고 상기 반구형 지붕이 지지가 됨; (5) 유형 3 A, 3 센티미터를 초과하여 상방 이동, 그리고 온전한 콜러 라인을 갖는 심각한 좌골 용해에 해당; 그리고, (6) 유형 3B, 3 센티미터를 초과하여 상방 이동, 그리고 콜러 라인이 파손된 심각한 좌골 용해 및 둘레 절반 이상의 경계 결함에 해당. 상기 출력 분류 유형 및 파라미터를 이용함으로써, 상기 결함 분류 모듈은 어느 분류 유형이 상기 인체 데이터에 가장 가깝게 닮아 상기 결과적인 할당 분류에 해당하는지 파악하기 위하여 상기 인체 데이터를 상기 재건된 데이터에 비교한다.
초기 단계로서, 스태티스티컬 아틀라스 단계에의 추가로 정상적인 아틀라스 3D 뼈 모델과 상기 비정상적인 3D 뼈 모델 사이의 관련성이 생성된다. 더욱 구체적으로, 상기 3D 뼈 모델은 상기 정상적인 3D 모델에서 무슨 뼈가 상기 비정상적인 3D 모델에서 존재하지 않는지를 파악하기 위하여 비교된다. 예시적인 형태에서, 상기 결손/비정상적인 뼈는 각각의 3D 뼈 모델의 표면 상의 포인트를 비교함으로써 그리고, 상기 비정상적인 3D 뼈 모델 상에 존재하지 않는, 상기 정상적인 3D 뼈 모델의 표면 상의 이산 포인트의 리스트를 제작함으로써 명시된다. 상기 시스템은 또한 상기 2개의 모델들 사이에 공통적인 표면 포인트를 기록 및 리스트 작성(즉, 명시)하거나, 또는 모든 기타 포인트가 상기 비정상적인 3D 뼈 모델 상에 부재하는 포인트로서 기록되지 않으면 두 뼈 모델(즉, 상기 정상적인 및 비정상적인 뼈 모델 모두)에서 공통적으로 존재하는 것으로 약식으로 메모할 수 있다. 따라서, 이러한 단계의 출력은 스태티스티컬 아틀라스 관련성을 가지며 상기 비정상적인 3D 뼈 모델이며 그 특징(포인트)이 상기 비정상적인 3D 뼈 모델에 존재하는지 또는 부재하는지를 나타내는 상기 정상적인 아틀라스 3D 뼈 모델로부터의 특징(포인트) 리스트이다.
상기 정상적인 아틀라스 3D 뼈 모델(상기 전체 뼈 재건 모듈로부터 제작됨)과 상기 비정상적인 3D 뼈 모델(상기 입력된 인체 데이터로부터 제작됨) 사이의 관련성 생성 이후, 상기 비정상적인 3D 뼈 모델로부터의 결손/비정상적인 부위는 상기 정상적인 아틀라스 3D 뼈 모델 상에 국소화된다. 달리 말하자면, 상기 정상적인 아틀라스 3D 뼈 모델은, 상기 정상적인 아틀라스 3D 뼈 모델에 존재하는, 상기 비정상적인 3D 뼈 모델의 뼈 결손을 명시 및 기록하기 위하여 상기 비정상적인 3D 뼈 모델과 비교된다. 국소화는, 제한 없이, 곡률 비교, 표면적 비교, 및 포인트 클라우드 영역 비교를 포함하는 여러 방식으로 수행될 수 있다. 궁극적으로, 예시적인 형태에서, 상기 결손/비정상적인 뼈는 상기 결손/비정상적인 부위(들)의 기하학적 경계를 명시하는 1 세트의 경계점으로 국소화된다.
상기 경계점을 이용함으로써, 상기 결함 분류 모듈은 입력된 임상 데이터를 이용함으로써 상기 결손/비정상적인 부위(들)로부터 특징을 추출한다. 예시적인 형태에서, 상기 추출된 특징은 형상 정보, 용적 정보, 또는 상기 결함(즉, 결손되거나 또는 비정상적인) 영역의 전반적인 특성을 나타내는 데에 이용되는 기타 임의의 정보를 포함할 수 있다. 이들 특징은 계속 진행 중인 결함 분류 데이터 또는 상기 인체 특징(인구통계학적, 병력, 등)에 반드시 관련되었다고는 할 수 부재하는 환자 임상 정보와 같은 기존의 임상 데이터에 기초하여 마무리될 수 있다. 이러한 단계의 출력은 후속 단계에서 유사한 생체조직(예를 들면, 뼈) 변형을 그룹화하기 위하여 이용될 상기 결함 영역(들)을 나타내는 수학적 디스크립터이다.
상기 수학적 디스크립터는 통계분석에 기초하여 클러스터링 또는 그룹화된다. 특히, 상기 디스크립터는 통계적으로 분석되고 다른 특정 집단에 특유한 결함 유형을 명시하기 위하여 환자/카데바로부터의 기타 디스크립터에 비교된다. 물론, 이러한 분류는 환자/카데바의 수가 증가됨에 따라 이산 군의 분류 및 명시을 개선하도록 다중 환자/카데바로부터의 다중 디스크립터를 전제로 한다. 이러한 통계분석으로부터의 출력은 새로 입력된 인체 데이터를 분류하기 위하여 이용되는 1 세트의 결함 유형이며 템플릿의 수를 결정한다.
상기 결함 분류 모듈의 출력은 템플릿 모듈에 보내진다. 예시적인 형태에서, 상기 템플릿 모듈은 상기 결함 분류 모듈에 의하여 명시되는 각각의 결함 유형에 대하여 특이적인 데이터를 포함한다. 예를 들어, 특정 결함 분류에 대한 각각의 템플릿은 상기 결함 뼈의 표면 표시, 상기 결함(들)의 위치(들), 및 상기 결함 뼈에 관련한 치수를 포함한다. 이러한 템플릿 데이터는 표면 형상 데이터, 포인트 클라우드 표시, 하나 이상의 곡률 프로파일, 치수 데이터, 및 물리량 데이터의 형태로 될 수 있다. 상기 템플릿 모듈 및 상기 스태티스티컬 아틀라스로부터의 출력은 대량 맞춤형 임플란트, 고정 장치, 기구 또는 금형을 설계, 테스트 및 그 제작을 가능하게 하도록 대량 맞춤 모듈에 의하여 이용된다. 상기 대량 맞춤 모듈의 예시적인 이용은 이후에 더욱 상세히 논의된다.
환자-맞춤형 재건 임플란트
도 1 및 도 20을 참조하면, 예시적인 과정 및 시스템은 부분적인, 기형, 및/또는 부서진 인체로 고통을 겪는 환자를 위하여 환자-맞춤형 정형외과용 임플란트 가이드 및 관련된 환자-맞춤형 정형외과용 임플란트를 제작하기 위하여 설명된다. 이러한 예시적인 설명을 위하여, 부분적인 인체를 갖는 환자를 위하여 전체 엉덩이 관절성형술절차를 설명한다. 그러나, 상기 예시적인 과정 및 시스템은 불완전하거나 또는 기형적인 인체가 존재하는 경우 환자-특이적 맞춤화에 적합한 임의의 정형외과용 임플란트에도 적용 가능함을 이해해야 한다. 예를 들어, 상기 예시적인 과정 및 시스템은 뼈 변성(부분적인 인체), 뼈 변형, 또는 부서진 뼈가 존재하는 어깨 대용물 및 무릎 대용물에 적용할 수 있다. 따라서, 아래에서는 비록 엉덩이 임플란트에 대해서 논하지만, 당업자는 상기 시스템 및 과정을 본래의 정형외과용 또는 정형외과용 재수술과 함께 이용하기 위하여 기타의 정형외과용 임플란트, 가이드, 기구, 등에 적용할 수 있음을 이해할 것이다.
골반 불연속성은 종종 전체 엉덩이 관절성형술(THA)에 가장 자주 연관되는 뼈 손실의 명백한 형태인데, 골용해증 또는 비구 골절은 열악한 부분으로부터 골반의 상부 양상이 분리되게 할 수 있다. 뼈 손실의 양 및 심각성 그리고 상기 임플란트가 생물학적으로 안으로 자랄 가능성은 특정 환자에 대한 치료 선택에 영향을 미칠 수 있는 요인이 된다. 심각한 뼈 손실 및 골반 무결성의 손실의 경우에, 맞춤형 3-플랜지 컵이 사용될 수 있다. 1992년에 처음으로 도입된, 이러한 임플란트는 기존의 케이지에 비하여 여러 장점을 갖는다. 이는 골반 불연속성에 안정성에 제공할 수 있고, 구조 이식편 및 케이지의 수술-중 윤곽형성의 필요성을 제거할 수 있으며, 주변의 뼈에 대한 상기 구성의 골 유착을 촉진할 수 있다.
환자의 부분적인, 기형, 및/또는 부서진 인체가 문제가 되는지에 상관없이, 환자-맞춤형 임플란트 및/또는 가이드를 제작하기 위한 예시적인 시스템 및 과정은 상기 환자의 재건된 인체에 대한 3차원적 모델을 제작하기 위하여 3D 뼈 모델 재건을 위한 위의 예시적인 과정 및 시스템(도 1-7 및 위의 동일한 예시적인 설명 참조)을 이용한다. 더욱 구체적으로, 골반 불연속성에 관련되는 전체 엉덩이 관절성형술의 경우, 상기 예시적인 환자-맞춤형 시스템은 측부 특이적인(우측 또는 좌측) 상기 환자의 완전한 골반에 대한 3D 모델을 제작하기 위하여 상기 환자의 골반 데이터를 이용한다. 따라서, 부분적인 인체에 대하여 환자 인체 데이터를 이용하기 위한 그리고 상기 환자의 인체에 대하여 3D 재건된 모델을 제작하기 위한 상기 시스템 및 과정의 설명은 간결성을 도모하기 위하여 생략된다. 따라서, 부분적인, 기형, 및/또는 부서진 인체로 고생하는 환자를 위하여 환자-맞춤형 정형외과용 임플란트 가이드 및 관련 환자-맞춤형 정형외과용 임플란트를 제작하기 위한 과정 및 시스템에 대한 설명은 상기 3차원적 재건된 모델의 성형 후 설명된다.
구체적으로 도 20-22 및 도 27을 참조하면, 상기 골반 및 대퇴골의 환자-맞춤형 재건된 3D 뼈 모델이 제작된 후, 상기 불완전한 환자-맞춤형 3D 뼈 모델(골반 및 대퇴골에 대한) 및 상기 재건된 3D 뼈 모델(골반 및 대퇴골에 대한)은 모두 상기 환자-맞춤형 정형외과용 임플란트 및 상기 임플란트 및/또는 그의 고정체(fasteners)에 대한 환자-맞춤형 배치 가이드를 제작하기 위하여 이용된다. 특히, 상기 결함 형상 추출 단계는 상기 환자-맞춤형 3D 모델과 상기 재건된 3D 모델 사이의 관련성(골반 모델들 사이의 관련성, 및 대퇴골 모델들 사이의 관련성, 하나의 대퇴골 모델과 골반 모델 사이는 아님)을 생성하는 것을 포함한다. 더욱 구체적으로, 상기 3D 모델은 상기 재건된 3D 모델에서 어느 뼈가 상기 환자-맞춤형 3D 모델에 존재하지 않는 것인지를 파악하기 위하여 비교된다. 예시적인 형태에서, 상기 결손/비정상적인 뼈는 각각의 3D 모델의 표면 상의 포인트를 비교하고 그리고, 상기 환자-맞춤형 3D 모델 상에는 존재하지 않는, 상기 재건된 3D 모델의 표면 상의 이산 포인트의 리스트를 제작함으로써 명시된다. 상기 시스템은 또한 상기 2개의 모델 사이에 공통적인 표면 포인트를 기록 및 리스트작성(즉, 명시)할 수 있고, 또는 모든 기타 포인트가 상기 환자-맞춤형 3D 모델 상에 부재하는 포인트로서 기록되지 않으면 두 뼈 모델(즉, 상기 재건된 3D 모델 및 환자-맞춤형 3D 모델 모두)에서 공통적으로 존재하는 것으로 약식으로 메모할 수 있다.
도 21을 참조하면, 상기 재건된 3D 모델(상기 전체 뼈 재건 모듈로부터 제작됨)과 상기 환자-맞춤형 3D 모델(상기 입력된 인체 데이터로부터 제작됨) 사이의 관련성 생성 후, 상기 환자-맞춤형 3D 모델로부터의 결손/비정상적인 부위는 상기 재건된 3D 모델 상에 국소화된다. 달리 말하자면, 상기 재건된 3D 모델은 상기 재건된 3D 모델에 존재하면서 상기 환자-맞춤형 3D 모델로부터는 결손된 뼈를 명시하고 기록하기 위하여 상기 환자-맞춤형 3D 모델에 비교된다. 국소화는, 제한 없이, 곡률 비교, 표면적 비교, 및 포인트 클라우드 영역 비교를 포함하는 여러 방식으로 수행될 수 있다.
궁극적으로, 예시적인 형태에서, 상기 결손/비정상적인 뼈는 국소화되고, 상기 출력은 2개의 리스트로 이루어진다: (a) 상기 환자-맞춤형 3D 모델에서 부재하거나 또는 기형인, 상기 재건된 3D 모델의 뼈에 해당하는 정점을 명시하기 위한 제 1 리스트; 그리고, (b) 상기 환자-맞춤형 3D 모델에서 존재하고 정상적인, 상기 재건된 3D 모델의 뼈에 해당하는 정점을 명시하기 위한 제 2 리스트.
도 21, 도 22, 및 도 27을 참조하면, 상기 결함 형상 추출 단계에 이어서, 임플란트 위치 단계가 수행된다. 대퇴골 또는 골반 임플란트를 위한 고정 위치를 파악하기 위하여, 상기 결함 형상 추출 단계로부터의 2개의 정점 리스트 및 상기 스태티스티컬 아틀라스로 부터의 정상적인 뼈(예를 들면, 골반, 대퇴골, 등)의 3D 모델(도 1 및 도 2 뿐만 아니라 위의 동일한 예시적인 설명 참조)이 입력된다. 더욱 구체적으로, 상기 고정 위치(즉, 임플란트 위치)는 자동으로 선택되어 환자가 잔여 뼈를 갖는 위치에 각각 위치된다. 반대로, 상기 고정 위치는 상기 환자의 잔여 뼈의 결함 영역에서는 선택되지 않는다. 이러한 방식으로, 상기 고정 위치는 상기 궁극적인 임플란트 설계/형상에 독립적으로 선택된다. 상기 고정 위치의 선택은 형상 정보 및 스태티스티컬 아틀라스 위치를 이용함으로써 자동화가능하다.
도 21에 나타낸 바와 같이, 상기 임플란트 위치 단계 이후, 다음 단계는 환자-맞춤형 임플란트 파라미터를 발생하는 것이다. 이 단계를 완료하기 위하여, 임플란트 파라미터화된 템플릿은 상기 임플란트의 근본적인 형상을 정의하기에 충분한 수의 파라미터 세트에 의하여 상기 임플란트를 정의하는 입력이다. 예를 들어, 부재하거나 또는 변성인 비구를 대체/보강하기 위한 골반 재건의 경우, 상기 임플란트 파라미터화된 템플릿은 대체 비구컵의 방향에 대한 각도 파라미터 및 상기 대퇴골두의 치수를 수용하기 위한 깊이 파라미터를 포함한다. 비구 임플란트에 대한 기타 파라미터는, 제한 없이, 상기 비구컵 직경, 대면 방향, 플랜지 위치 및 형상, 고정 나사의 위치 및 방향을 포함할 수 있다. 다공질 임플란트의 경우, 공극률의 위치 및 구조적 특성이 포함되어야 한다. 예를 들어, 부재하거나 또는 변성인 대퇴골을 대체/보강하기 위한 대퇴골 재건의 경우, 상기 임플란트 파라미터화된 템플릿은 대체 대퇴골두의 방향에 대한 각도 파라미터, 경부 길이, 헤드 오프셋, 근위부 각도, 및 외부 대퇴골 및 과간부위 채널의 단면분석을 포함한다. 임플란트의 근본적인 형상을 정의하기 위하여 선택되는 파라미터가, 치환되거나 또는 보충된 인체에 따라 변화됨을 당업자는 이해할 것이다. 따라서, 임플란트의 근본적인 형상을 정의하기에 충분한 파라미터에 대한 한정적 열거는 의미가 없다. 그럼에도 불구하고, 예를 들어 도 22에 나타낸 바와 같이, 상기 재건된 3D 골반 모델은 상기 비구컵의 노뼈, 상기 비구컵 둘레 상부 능선으로 이루어지는 골반 뼈의 명시, 및 잔여 골반에 대한 상기 비구컵의 방향 명시을 구하기 위하여 이용될 수 있다. 더욱이, 상기 파라미터는 상기 임플란트가 최상으로/보다 잘 상기 환자-맞춤형 인체에 맞도록 상기 임플란트 위치를 고려하여 개선될 수 있다.
상기 임플란트의 근본적인 형상을 정의하기에 충분한 수의 파라미터 세트를 확정함에 이어서, 상기 임플란트의 설계에 착수된다. 더욱 구체적으로, 상기 전반적인 임플란트 표면 모델의 초기 반복이 구성된다. 상기 전반적인 임플란트 표면 모델의 이러한 초기 반복은 환자-맞춤형 윤곽 및 상기 임플란트된 부위에 대하여 추정된 윤곽의 조합에 의하여 정의된다. 추정된 윤곽은 상기 재건된 3D 뼈 모델, 결손 인체 뼈, 및 상기 재건된 3D 뼈 모델로부터 추출된 특징으로부터 결정된다. 상기 임플란트 부위의 이러한 특징 및 위치는, 자동으로 결정될 수 있는 것으로서, 예를 들어 비구컵 임플란트에 대하여 도 22에 나타낸 바와 같이, 상기 전반적인 임플란트 형상을 결정하기 위하여 이용된다.
도 20를 참조하면, 상기 전반적인 임플란트 표면 모델의 초기 반복은 맞춤형(즉, 환자-맞춤형) 계획 순서에 따라 처리된다. 이러한 맞춤형 계획 순서는 반복적인 검토 및 설계 과정의 일부로서 외과 전문의 및 엔지니어로 부터의 입력에 관계될 수 있다. 특히, 상기 외과 전문의 및/또는 엔지니어는 상기 전반적인 임플란트 표면 모델에 변화가 필요한지를 결정하기 위하여 상기 전반적인 임플란트 표면 모델 및 상기 재건된 3D 뼈 모델을 검토할 수 있다. 이러한 검토는 상기 엔지니어와 외과 전문의 사이에 합의가 도출될 때까지 상기 전반적인 임플란트 표면 모델의 반복을 야기할 수 있다. 이러한 단계로부터의 출력은 상기 최종 임플란트에 대한 표면 모델이며, 이는 상기 최종 임플란트 또는 가시적인 모델을 제작하기 위하여 CAD 파일, CNC 공작기계 인코딩, 또는 신속 제작 명령어의 형태로 될 수 있다.
도 20, 도 22, 및 도 23을 참조하면, 상기 환자-맞춤형 정형외과용 임플란트의 설계와 동시에 또는 그 이후에 환자 맞춤형 배치 가이드의 설계가 이루어진다. 위에서 예시적인 형태에서 논한 바와 같이 비구컵 임플란트에 있어서, 상기 환자-맞춤형 비구컵의 배치를 돕기 위하여 하나 이상의 수술 기구를 설계 및 제작할 수 있다. 상기 환자-맞춤형 임플란트가 상기 잔여 뼈의 크기 및 형상에 매칭되는 크기 및 형상을 갖도록 설계하는 데에, 상기 환자-맞춤형 임플란트의 윤곽 및 형상이 이용될 수 있고 상기 배치 가이드의 일부로서 결합될 수 있다.
예시적인 형태에서, 상기 비구 배치 가이드는 장골, 좌골, 및 치골 표면과 접촉하도록 구성된 3개의 플랜지로 이루어지며, 상기 3개의 플랜지는 링을 통하여 상호 연결된다. 더욱이, 상기 배치 가이드의 플랜지는 상기 비구컵 임플란트와 동일한 형상, 크기 및 윤곽을 취할 수 있으므로, 상기 배치 가이드는 상기 비구컵 임플란트에 대하여 계획된 바와 동일한 위치에 놓일 수 있다. 달리 말하자면, 상기 비구 배치 가이드는, 상기 비구컵 임플란트가 그러하듯이, 환자 인체(장골, 좌골, 및 치골 부분적인 표면)에 대한 네거티브 전사 형태로 되므로, 상기 배치 가이드는 상기 환자 인체에 정확히 맞게 된다. 그러나, 상기 임플란트 가이드는 홀 및/또는 고정체의 배치를 위하여 드릴링을 가이드하기 위하여 하나 이상의 고정 홀을 포함한다는 점에서 임플란트와 크게 상이하다. 예시적인 형태에서, 상기 배치 가이드는, 상기 비구컵 임플란트를 상기 잔여 골반에 안착시킬 때 이용될 임의의 드릴비트 또는 기타 가이드(예를 들면, 다우얼)의 적절한 방향을 보장하기 위하여, 영상 분석(예를 들면, 마이크로CT)에 기초한 크기 및 방향으로 되는 홀을 포함한다. 상기 홀의 수 및 방향은 상기 잔여 뼈에 따라 달라지는데, 이는 상기 비구컵 임플란트의 형상에도 영향을 미친다. 도 23은 전체 엉덩이 관절성형술절차에서 사용하기 위한 환자-맞춤형 배치 가이드의 일 예를 나타낸다. 또 다른 사례에서, 상기 가이드는 상기 임플란트에 맞추어져서 상기 고정 나사의 방향만을 안내하도록 형성될 수도 있다. 이 형태에서, 상기 가이드는 상기 임플란트의 네거티브 형태로 되어, 상기 임플란트 위로 직접 배치될 수 있다. 그럼에도 불구하고, 상기 환자-맞춤형 재건된 임플란트의 크기, 형상, 및 윤곽 중 적어도 일부를 포함하는 것은 상기 환자-맞춤형 임플란트가 결합될 의도된 뼈에 무관하게 수행되는 주제이다.
여기에 설명된 상기 예시적인 시스템 및 방법을 이용하는 것은 재건된 3차원적 모델을 통하여 수술 전에 정확한 각도 및 평면 방향을 측정할 수 있는 능력, 정형외과용 배치의 보다 높은 정확성, 및 보다 나은 인체 통합의 결실을 낳을 수 있는 풍부한 정보를 제공할 수 있다.
대량 맞춤화 가능한 요소를 이용한 맞춤형 임플란트의 제작
도 26을 참조하여, 대량으로 맞춤화 가능한 요소를 이용하여 맞춤형 정형외과용 임플란트를 제작하기 위한 예시적인 과정 및 시스템을 설명한다. 상기 예시적인 설명을 위하여, 심각한 비구 결함이 있는 환자에 대한 전체 엉덩이 관절성형술절차를 설명한다. 그러나, 상기 예시적인 과정 및 시스템은 불완전한 인체가 존재하는 경우에 대량 맞춤에 적절한 임의의 정형외과용 임플란트에 적용 가능함을 이해해야 한다.
심각한 비구 결함은 회복을 위하여 특별한 과정 및 임플란트 요소를 요한다. 그러한 접근 중 하나는 맞춤형 3-플랜지로서, 전체 맞춤형 임플란트는 비구컵 및 장골, 좌골, 및 치골에 부착되는 3개의 플랜지로 이루어진다. 상기 예시적인 과정 및 시스템과는 대조적으로, 종래기술의 3-플랜지 임플란트는 단일의 복합 요소로 이루어지며, 이는 제조하기에 크고 복잡하며 상기 전체 임플란트가 모든 경우를 위하여 재설계될 것을 요한다(즉, 완전히 환자-맞춤형). 상기 예시적인 과정 및 시스템은 맞춤형 3-플랜지 임플란트를 제작하며, 이는 맞춤형 부품 및 공극률을 허용하도록 전적으로 맞춤형인 요소에 더하여 대량으로 맞춤 가능한 요소의 모듈 방식 이용을 가능하게 한다.
상기 예시적인 과정에 의한 사전 계획 단계는 상기 컵, 상기 플랜지 접촉 위치, 및 상기 비구컵 방향 및 크기에 관련하여 3개 플랜지의 방향을 결정하기 위하여 수행된다. 이러한 사전계획 단계는 이 단계 직전에 상기 "환자-맞춤형 임플란트" 논의에 따라 수행된다. 예를 들어, 임플란트 고정의 특이적 위치는 바로 직전 구간에서 논의되는 바대로 그의 시작역할을 하는 데이터 입력을 이용하여 임플란트 위치 단계에 따라 결정된다. 상기하면, 이러한 임플란트 위치 단계의 일부로서, 상기 맞춤형 3-플랜지를 위한 고정 위치를 파악하기 위하여, 상기 결함 형상 추출 단계로부터의 2개의 정점 리스트 및 상기 스태티스티컬 아틀라스로부터의 정상적인 골반에 대한 3D 모델(도 1 및 도 2, 및 위의 동일한 예시적인 설명 참조)이 입력된다. 더욱 구체적으로, 상기 고정 위치(즉, 임플란트 위치)는 환자가 잔여 뼈를 갖는 곳에 각각 위치되도록 선택된다. 달리 말하자면, 상기 고정 위치는 환자의 잔여 골반의 결함 영역에서는 선택되지 않는다. 이러한 방식으로, 상기 고정 위치는 상기 궁극적인 임플란트 설계/형상에 독립적으로 선택된다.
상기 고정 위치의 결정 이후, 상기 3-플랜지 요소(즉, 플랜지)는 이러한 구간에 바로 앞서는 상기 "환자-맞춤형 임플란트" 논의를 이용하여 설계된다. 상기 플랜지는 상기 대체 비구컵에 대하여 방향도록 설계되어 상기 컵 방향이 만족스러운 관절 기능을 제공하도록 한다. 또한, 상기 3-플랜지의 접촉 표면은 골반의 뼈 표면에 대하여 "네거티브" 형상으로 되므로 상기 플랜지의 접촉 표면은 환자의 인체 골반에 매칭되도록 윤곽 형성된다. 도 23의 예시적인 과정은 상기 플랜지를 쾌속 조형하기 위하여(또는 종래의 컴퓨터 수치제어(CNC) 장치를 이용하기 위하여) 도 17에 나타낸 상기 과정의 최종 단계를 이용한다. 상기 플랜지가 제작된 후, 상기 3-플랜지에 다공질 물질을 추가할 수 있는 캐비티(캐비티)을 제공하기 위하여 추가의 가공 또는 단계를 수행할 수 있다.
맞춤형 요소로 될 필요가 없는 상기 3-플랜지 시스템의 일부분은 상기 비구컵 요소이다. 이러한 예시적인 과정에서, 비구컵의 패밀리는 초기에 제작되고 상기 3-플랜지 시스템을 세울 토대를 제공한다. 이들 "블랭크(blank)" 컵은 필요에 따라 인벤토리로 보유할 수 있다. 상기 컵에 대하여 특정 공극률이 필요하면, 상기 컵 내로 다공질 물질을 압입할 수 있는 기계적 특징이 상기 컵에 부가된다. 양자택일적으로, 상기 컵에 특정 공극률이 필요하면, 하나 이상의 다공질 코팅을 이용하여 상기 컵을 코팅할 수도 있다.
상기 블랭크 컵이 형성되고 임의의 공극률이 이상에서 논한 바와 같이 이루어진 후, 상기 컵은 상기 플랜지를 수용하도록 상기 컵을 가공함으로써 환자-맞춤형으로 제시된다. 특히, 상기 플랜지의 가상 모델을 이용함으로써, 상기 시스템 소프트웨어로 상기 플랜지에 대한 가상 로킹 메커니즘을 구성하여, 상기 컵에 로킹 메커니즘이 처리되도록 기계코딩으로 변환된다. 이들 로킹 메커니즘은 상기 컵이 상기 플랜지에 고정될 수 있도록 하여, 상기 플랜지가 상기 환자의 잔여 뼈에 장착될 때, 상기 컵이 상기 잔여 골반에 대하여 적절하게 방향되도록 한다. 이러한 가공에는 상기 블랭크 컵에 상기 로킹 메커니즘을 형성하기 위하여 CNC장치가 사용될 수 있다.
상기 블랭크 컵의 일부로서 상기 로킹 메커니즘을 제작함에 이어서, 상기 플랜지는 상기 로킹 메커니즘들 사이의 인터페이스를 이용하여 상기 컵에 장착된다. 상기 3-플랜지 어셈블리(즉, 최종 임플란트)는 상기 요소들 사이에 강력한 접착을 도모하기 위하여 어닐링 공정을 거친다. 상기 3-플랜지 임플란트의 어닐링 이후, 상기 3-플랜지 임플란트에 대한 살균 환경을 보장하기 위하여 살균 공정이 이루어지고 이어서 적절히 포장된다.
대량 맞춤형 임플란트의 제작
도 28을 참조하여, 부분적인, 기형, 및/또는 부서진 인체로 고생하는 환자를 위하여 대량 맞춤형 정형외과용 임플란트 가이드 및 관련된 대량 맞춤형 정형외과용 임플란트를 제작하는 예시적인 과정 및 시스템을 설명한다. 상기 예시적인 설명을 위하여, 본래의 관절을 대체할 필요가 있는 환자에 대하여 전체 엉덩이 관절성형술절차를 설명한다. 그러나, 상기 예시적인 과정 및 시스템은 불완전한 인체가 존재하는 경우에 대량 맞춤에 적절한 임의의 정형외과용 임플란트에 적용 가능함을 이해해야 한다. 예를 들어, 상기 예시적인 과정 및 시스템은 뼈 변성(부분적인 인체), 뼈 변형, 또는 부서진 뼈가 존재하는 경우 견관절 치환술 및 슬관절 치환술에 적용가능하다. 따라서, 아래에서는 비록 엉덩이 임플란트에 대해서 논하지만, 당업자는 상기 시스템 및 과정을 본래의 정형외과용 또는 정형외과용 재수술과 함께 이용하기 위하여 기타의 정형외과용 임플란트, 가이드, 기구, 등에 적용할 수 있음을 이해할 것이다.
상기 예시적인 과정은 매크로 관점 및 마이크로 관점으로부터의 입력 데이터를 이용한다. 특히, 상기 매크로 관점은 상기 정형외과용 임플란트 및 해당 인체의 전반적인 기하학적 형상의 결정을 수반한다. 반대로, 상기 마이크로 관점은 망상조직의 뼈의 형상 및 구조 그리고 그의 공극률을 고려를 수반한다.
상기 매크로 관점은 특정 집단에서 고유의 해부학적 변동성을 포착하기 위하여 하나 이상의 인체(예를 들면, 뼈)의 가상, 3D 모델을 기록하는 스태티스티컬 아틀라스 모듈과 통신하는 데이터베이스를 포함한다. 예시적인 형태에서, 상기 아틀라스는 상기 하나 이상의 인체의 인체 특징의 수학적 표현 및 특정 인체 집단의 평균 표상에 대한 변화를 기록한다. 도 2 및 상기 스태티스티컬 아틀라스에 대한 위의 설명 및 특정 집단의 스태티스티컬 아틀라스에 인체를 추가하는 방법에 대한 설명을 참조한다. 상기 스태티스티컬 아틀라스로부터의 출력은 자동 표식자 모듈 및 표면/형상 분석 모듈에 보내진다.
상기 자동 표식자 모듈은 상기 스태티스티컬 아틀라스 내 인체의 각각의 경우에 대한 인체 표식자를 계산하기 위하여 상기 스태티스티컬 아틀라스(예를 들면, 특이적 표식자를 포함할 개연성이 높은 부위) 및 국소적인 기하학적 분석으로부터의 입력을 이용한다. 이러한 계산은 각각의 표식자에 대하여 특이적이다. 상기 부위의 대략적인 형상은 확인되어 있고, 예를 들어, 검색되는 표식자의 위치는 상기 국소적인 형상 특성에 대하여 확인된다. 예를 들어, 상기 말단 대퇴골의 내측 상과부 포인트를 국소화하는 것은 상기 스태티스티컬 아틀라스 내에서 내측 상과부 포인트의 대략적인 위치에 기초한 검색을 개선함으로써 달성된다. 따라서, 상기 내측 상과부 포인트는 이러한 검색 윈도우 내에서 가장 내측에 있다고 알려져 있으므로, 상기 가장 내측 포인트의 검색은 상기 스태티스티컬 아틀라스 내에 정의된 상기 내측 상과부 부위 내에서 각각의 뼈 모델에 대하여, 상기 내측 상과부 포인트 표식자로서 명시되는 검색의 출력으로써 수행된다. 상기 인체 표식자는 상기 스태티스티컬 아틀라스 집단 내에서 각각의 가상, 3D 모델에 대하여 자동으로 계산된 후, 상기 스태티스티컬 아틀라스의 가상, 3D 모델은 형상/표면 분석 출력을 따라 특징 추출 모듈에 보내진다.
상기 형상/표면 출력은, 역시 상기 스태티스티컬 아틀라스로부터 입력을 수신하는 형상/표면 모듈로부터 나온다. 상기 형상/표면 모듈에 있어서, 상기 스태티스티컬 아틀라스 집단 내 가상, 3D 모델은 상기 자동 표식자에 의하여 망라되지 않는 형상/표면 특징에 대하여 분석된다. 달리 말하자면, 인체의 전반적인 3D 형상에 해당하지만 이전의 자동 표식 단계에서 정의된 특징에 속하지 않는 특징 또한 계산된다. 예를 들어, 곡률 데이터는 상기 가상의 3D 모델에 대하여 계산된다.
상기 표면/형상 분석 모듈 및 상기 자동 표식자 모듈로부터의 출력은 특징추출 모듈로 보내진다. 표식자 및 형상 특징의 조합을 이용하여, 임플란트 설계에 관련된 수학적 디스크립터(즉 곡률, 치수)는 상기 아틀라스에서 각각의 경우에 대하여 계산된다. 이들 디스크립터는 클러스터링 과정에 대한 입력으로서 이용된다.
상기 수학적 디스크립터는 통계분석에 기초하여 클러스터링 또는 그룹화된다. 특히, 상기 디스크립터는 상기 집단 내에서 유사한 특징을 갖는 군(인체의)을 명시하기 위하여 통계적으로 분석되고 나머지 인체 집단으로부터의 다른 디스크립터에 비교된다. 물론, 이러한 클러스터링은 상기 집단 전체에 걸쳐 다수의 인체로부터의 다수의 디스크립터에 기초한다. 상기 초기 클러스터링에는 존재하지 않았던 새로운 사례가 상기 클러스터링에 나타나면, 상기 출력 클러스터는 상기 새로운 집단을 더욱 잘 나타내도록 개선된다. 이러한 통계분석으로부터의 출력은 모든 또는 대다수의 상기 인체 집단을 커버하는 한정된 수의 임플란트(임플란트 패밀리 및 크기 포함)이다.
각각의 클러스터에 대하여, 파라미터화 모듈은 상기 클러스터 내에서 상기 수학적 디스크립터를 추출한다. 상기 수학적 디스크립터는 상기 궁극적인 임플란트 모델에 대하여 상기 파라미터(예를 들면, CAD 설계 파라미터)를 형성한다. 상기 추출된 수학적 디스크립터는 임플란트 표면 제작 모듈에 제공된다. 각각의 클러스터에 대하여 상기 인체의 3D, 가상 모델을 제작하기 위하여 상기 수학적 디스크립터를 표면 디스크립터로 전환하는 데에는 이 모듈에 책임이 있다. 상기 3D, 가상 모델은 스트레스 테스트 및 임플란트 제작에 앞서 상기 마이크로 관점을 보완한다.
상기 마이크로 관점에서, 특정 집단의 각각의 인체에 대하여, 구조 건전성을 나타내는 데이터를 구한다. 예시적인 형태에서, 뼈에 대한 이러한 데이터는 상기 망상조직의 뼈에 대한 구조적 정보를 제공하는 마이크로CT 데이터로 이루어질 수 있다. 더욱 구체적으로, 상기 마이크로CT 데이터는 상기 당해 뼈에 대한 영상(전체 집단에 걸쳐 다중 뼈에 대한 다중 마이크로CT 영상)으로 이루어질 수 있다. 그 후, 이들 영상은, 상기 망상조직의 뼈의 3차원적 기하학적 구조를 추출하기 위하여 그리고 상기 집단 내에서 각각의 뼈에 대한 가상, 3D 모델을 제작하기 위하여, 상기 추출된 섬유주 골형 구조 모듈을 통하여 분할된다. 그 결과적인 3D 가상 모델은 공극 크기 및 형상 모듈에 입력된다. 도 84에 사실적으로 나타낸 바와 같이, 상기 3D 가상 모델은 다공질 크기 및 형상 정보를 포함하며, 이는 상기 망상조직의 뼈의 공극 크기 및 크기를 결정하기 위하여 상기 공극 크기 및 형상 모듈에 의하여 평가된다. 이러한 평가는 상기 골수강 내 뼈의 다공질 크기 및 형상을 분석하는 데에 유용하므로, 상기 대퇴골 임플란트의 스템은 상기 대퇴골의 잔여 뼈와 상기 대퇴골 임플란트 사이의 통합을 도모하기 위하여 코팅으로 처리되거나 또는 다공질 외부를 갖도록 처리될 수 있다. 이러한 모듈로부터의 출력은, 상기 임플란트 표면 제작 모듈로부터의 상기 3D 가상 모델 출력과 조합으로, 가상 스트레스 테스트 모듈에 보내진다.
상기 스트레스 테스트 모듈은 상기 최종 임플란트 형상 모델 및 특성을 정의하기 위하여 상기 공극 크기 및 형상 모듈로부터의 임플란트 공극률 데이터 및 상기 임플란트 표면 제작 모듈로부터의 임플란트 형상 데이터를 결합한다. 예를 들어, 상기 형상 및 특성은 당해 뼈에 대한 망상조직의 뼈 공극률에 대략적으로 매칭되는 상기 최종 임플란트 모델에 다공질 코팅을 제공하는 것을 포함한다. 일단 상기 형상 및 특성이 결합되면, 상기 최종 임플란트 모델은 상기 모델의 기능적 품질을 확인하기 위하여 가상 스트레스 테스트(유한-요소 분석 및 기계적 분석)를 겪는다. 상기 기능적 품질이 허용 불가능하면, 허용 가능한 성능을 달성할 때까지 상기 임플란트 형상 및 공극률을 정의하는 파라미터가 수정된다. 상기 최종 임플란트 모델이 상기 스트레스 테스트 참조을 만족시킨다고 추정되면, 상기 최종 임플란트 모델은 상기 가상 모델을 가시적인 임플란트(당업자에게 주지된 제작 과정에 의하여 더욱 개선될 수 있음)로 전환하는 데에 필요한 기계 명령어를 생성하는 데에 이용된다. 예시적인 형태에서, 상기 기계 명령어는 쾌속 조형 과정(다공질 구조를 획득하기 위하여) 또는 전통적인 제작과 쾌속 조형의 조합을 통하여 상기 최종 임플란트를 제작하기 위한 신속 제작 기계 명령어를 포함할 수 있다.
성별/민족성에 따른 맞춤형 엉덩이 임플란트의 제작
도 29-84를 참조하여, 성별 및/또는 민족성에 따른 맞춤형 임플란트를 제작하기 위하여 예시적인 과정 및 시스템을 설명한다. 상기 예시적인 설명을 위하여, 본래의 관절을 대체할 필요가 있는 환자에 대하여 전체 엉덩이 관절성형술절차를 설명한다. 그러나, 상기 예시적인 과정 및 시스템은 맞춤화에 적절한 임의의 정형외과용 임플란트에 적용 가능함을 이해해야 한다. 예를 들어, 상기 예시적인 과정 및 시스템은 견관절 치환술 및 슬관절 치환술 및 기타 원래 관절의 대체 절차에 적용가능하다. 따라서, 아래에서는 비록 엉덩이 임플란트에 대해서 논하지만, 당업자는 상기 시스템 및 과정을 본래의 정형외과용 또는 정형외과용 재수술과 함께 이용하기 위하여 기타의 정형외과용 임플란트, 가이드, 기구, 등에 적용할 수 있음을 이해할 것이다.
상기 고관절은 상기 대퇴골의 헤드 및 상기 골반의 비구로 구성된다. 상기 고관절 구조는 상기 인체에서 가장 안정적인 관절 중 하나를 형성한다. 상기 안정성은 강성 볼 및 소켓 구조에 의하여 제공된다. 상기 대퇴골두는 구의 2/3를 형성하는 그의 관절부분에서 거의 구의 형상으로 된다. 데이터는 남성보다 여성의 상기 대퇴골두의 직경이 더 작다는 것을 보여준다. 상기 정상적인 엉덩이에서, 상기 대퇴골두의 중앙은 상기 비구의 중앙과 정확히 일치하는 것으로 추정되며 이러한 추정은 대부분의 엉덩이 시스템 설계에 기초로 이용된다. 그러나, 상기 고유의 비구는 상기 고유의 대퇴골두를 전부 커버하기에 충분히 깊지 않다. 상기 대퇴골두의 대부분의 둥근 부분은 구형보다는 오히려 둥근 타원형인데 그 이유는 그 최상부가 다소 편평하기 때문이다. 이러한 둥근 타원형 형상은 부하로 하여금 상기 상부 극 주위에 링-형 패턴으로 분산되도록 한다.
상기 대퇴골두의 기하학적 중앙부는 상기 관절의 3개 축: 수평축; 상기 수직축; 그리고, 상기 전방/후방축에 의하여 횡단된다. 상기 대퇴골두는 상기 대퇴골의 경부에 의하여 지지되며, 이는 축을 연결한다. 상기 대퇴경부의 축은 상측, 내측 및 전방측으로 비스듬히 설정되고 이어진다. 전방 평면에서 상기 축에 대한 상기 대퇴경부의 경사 각도는 상기 경부 축 각도이다. 대부분의 성인에게 있어서, 이러한 각도는 90 내지 135도로 변화되며, 이는 상기 엉덩이 외전근, 사지의 길이, 및 상기 고관절에 가해지는 힘의 유효성을 결정하기 때문에 중요하다.
125도를 초과하는 경사 각도는 외반고(coxa valga)로 불리우며, 반면에 125도 미만인 경사 각도는 내반고로 불리운다. 125도보다 큰 경사 각도는 길어진 사지, 상기 엉덩이 외전근의 감소된 유효성, 상기 대퇴골두 상의 증가된 부하, 및 상기 대퇴경부 상의 증가된 응력과 부합한다. 내반고의 경우, 125도 미만의 경사 각도는 짧아진 사지, 상기 엉덩이 외전근의 증가된 유효성, 상기 대퇴골두 상의 감소된 부하, 및 상기 대퇴경부 상의 감소된 응력과 부합한다. 상기 대퇴경부는 상기 대퇴골 관절구의 가로방향 축과 예각을 형성한다. 이러한 각도는 내측 및 전방측을 향하며 전염각 각도로 불리운다. 성인에게 있어서, 이러한 각도는 대략 7.5도가 평균이다.
상기 비구는 상기 엉덩이의 측부에 놓이며, 여기에서 장골, 좌골, 및 치골이 만난다. 이들 3개의 분리된 뼈는 상기 비구의 형성으로 연결되며, 여기에서 상기 장골 및 좌골은 각각 상기 비구의 대략 2/5에 기여하고 상기 치골은 상기 비구의 1/5에 기여한다. 상기 비구는 상기 대퇴골두의 전부를 커버하기에 충분히 깊은 정도의 소켓이 아니며 관절형 부분 및 비-관절형 부분을 모두 갖는다. 그러나, 상기 비구 관절와순은 안정성을 증가시키기 위하여 상기 소켓을 깊게 한다. 관절와순과 함께, 상기 비구는 상기 대퇴골두의 50%를 살짝 넘는 정도로 상기 대퇴골두를 커버한다. 상기 비구의 측부에만 관절연골이 대어져 있는데, 이는 깊은 관골구절흔에 의하여 아래로 가로막혀 있다. 상기 비구 캐비티의 중앙부분은 상기 관절연골보다 깊고 비관절형이다. 이러한 중앙 부분은 안골구와로 불리우며 상기 골반 뼈의 인터페이스로부터 얇은 판에 의하여 분리되어 있다. 상기 안골구와는 모든 환자에게 있어 특유한 부위이며 상기 비구컵 요소의 리밍 및 배치를 위한 환자-맞춤형 가이드를 제작하는 데에 이용된다. 또한, 인체 특징의 변화는 개체군 특이적 임플란트 설계에 대한 필요성을 더욱 타당하게 한다.
접합제를 쓰지 않은 요소를 사용하는 종래 기술에 관련된 문제 중 일부는 상기 대퇴골 관의 크기, 형상, 및 방향에 있어서의 폭넓은 변화에 기인할 수 있다. 대퇴골 스템의 정형외과용 임플란트 설계에 있어서 문제 중 하나는 내측방 및 전후방 치수에 있어서의 큰 변화이다. 말단 관 크기에 대한 상기 근위부의 비율에도 상당한 변화가 있다. 상기 정상적인 집단에서 다양한 호 형태, 테이퍼 각도, 곡선, 및 오프셋의 상이한 조합이 진행된다. 그러나, 문제는 그뿐만이 아니다.
대퇴골 형태학에 있어서의 조상전래의 차이 및 현대 집단에 대한 분명한 참조의 부족은 적절한 엉덩이 임플란트 시스템 설계에 문제를 야기한다. 예를 들어, 아메리카 인디언, 미국 흑인, 미국 백인 사이에는 전방 곡률, 비틀림, 및 단면 형상에 큰 차이가 존재한다. 대퇴골에 있어서 아시아 집단과 서양 집단 차이의 차이는 대퇴골의 전방 활모양(구부러짐)에서 발견되는데, 백인 대퇴골보다 중국인들의 대퇴골이 전방으로 더욱 구부러져 있고 더 작은 골수강 및 더 작은 말단 관절구로 외측으로 회전된다. 마찬가지로, 백인 대퇴골은 일본인 대퇴골보다 길이 말단 관절구 치수가 더 크다. 미국 흑인과 미국 백인 사이에 민족성 차이는 대퇴골 근위부 골밀도(mineral bone density, BMD) 및 대퇴부 축 길이에도 존재한다. 보다 높은 BMD, 보다 짧은 대퇴부 축 길이, 및 보다 짧은 대퇴전자간 폭의 병용 효과는 미국 백인 여성에 비하여 미국 흑인 여성에서 골다공증성 골절의 유병률이 더 낮음을 설명할 수 있다. 마찬가지로, 백인 남성 및 라틴 아메리카계 남성에서 보다 노인 아시아 남성 및 미국의 흑인 남성이 보다 두꺼운 피질과 보다 높은 BMD를 갖는 것으로 밝혀졌고, 이는 이들 민족성 군에서 뼈 강도가 더 높음에 기여할 수 있다. 일반적으로, 미국 흑인은 미국 백인보다 더 두꺼운 골 피질, 더 좁은 골 내막 직경 및 더 높은 BMD를 갖는다.
상기 조상 전래(및 민족성)의 대퇴골 및 골반 차이를 결합하는 것은 본래의 엉덩이 시스템에 훨씬 더 어려운 문제가 된다. 재수술은 더욱 복잡한 문제를 일으킨다. 이들 정상적인 인체의 변화 및 민족성 변화에 더해져, 재수술을 수행하는 외과 전문의가 직면하게 되는 어려움들은: (a) 원래 위치된 보철물 주위의 뼈 손실에 의하여 유발되는 대퇴골 관의 비틀림; 및, (b) 상기 요소 및 접착제 제거에 의하여 발생되는 의원성 결함에 의하여 더욱 악화된다.
상술된 바의 모든 요인들은 많은 고관절 외과 전문의로 하여금 비접착 대퇴골 보철물의 설계를 개선하는 방법을 찾도록 하고 있다. 고관절 전치환술(최초 또는 재수술)에서, 이상적인 것은 상기 대퇴골 볼과 비구컵 사이에 최적의 맞춤을 설정하는 것이다. 대퇴골 스템 경부는 강성을 줄이기 위하여 십자형 단면을 가져야 한다. 스템 길이는 상기 스템으로 하여금 2 내지 3개의 내부관 직경을 거쳐 상기 대퇴골의 벽에 평행하게 접촉되도록 되어야 한다. 상기 스템의 1/3 근위부는 다공질로 코팅되거나 또는 수산인회석(HA)으로 코팅된다. 상기 스템은 만곡하중을 제어하기 위하여 그리고 기부 쪽으로 모든 회전방향 및 축방향 부하의 전달을 가능하게 하기 위하여 원통형(즉, 테이퍼되지 않음)으로 된다. 상기 대퇴골두 위치는 환자 자신의 헤드 중앙을 재현해야 하며, 그렇지 않으면 비정상적인 것이 된다.
이러한 목적을 만족시키기 위한 방법 중 하나는 각각의 환자에 대하여 개별적으로 대퇴골 보철물을 제작하는 것이다. 달리 말하자면, 기성품 보철에 맞추기 위하여 환자 뼈의 모양을 고치려 하기 보다는 특정 환자에 대하여 특이적인 보철을 제작하는 것이다.
환자-맞춤형(또는 대량 맞춤) 최초 또는 재수술 고관절 치환술에 대하여 공통적인 설계 규칙이 있다. 이들 설계 규칙 중에는 다음의 것들이 있다: (1) 상기 엉덩이 스템은 상기 대퇴골에 부하의 균일한 분산을 가능케 하기 위하여 칼라리스로 되어야 하며(재수술 제외); (2) 상기 엉덩이 스템은 맞춤/채움을 최대화하기 위하여 변형 장능형 단면을 가지면서도 회전 안정성을 유지해야 한다; (3) 상기 엉덩이 스템은 환자의 뼈에 맞추어야 할 때 활처럼 굽혀져야 한다; (4) 상기 엉덩이 스템은 보철물과 뼈 사이에 갭이 없이 곡선형 통로를 따라 삽입되어야 한다; (5) 상기 엉덩이 스템 경부는 강성을 줄이기 위하여 십자형 단면을 가져야 한다; (6) 상기 엉덩이 스템 길이는 2 내지 3개의 내부 관 직경을 거쳐 상기 대퇴골의 벽과 평행하게 접촉되도록 이루어져야 한다; (7) 상기 엉덩이 스템의 1/3 근위부는 다공질로 코팅되거나 또는 수산인회석(HA)으로 코팅되어야 한다; (8) 상기 엉덩이 스템은 만곡하중을 제어하기 위하여 그리고 기부쪽으로 모든 회전방향 및 축방향 부하의 전달을 가능하게 하기 위하여 원통형(즉, 테이퍼되지 않음)이다; (9) 상기 엉덩이 스템의 대퇴골두 위치는 환자 자신의 헤드 중앙을 재현해야 하며, 그렇지 않으면 비정상적인 것이 된다.
아래에 환자 집단의 성별 및/또는 민족성을 고려하여 본래 관절의 대체를 요하는 상기 환자에 대하여 대량 맞춤형 정형외과용 임플란트를 제작하기 위한 예시적인 과정 및 시스템을 설명한다. 상기 예시적인 설명을 위하여, 부분적인 인체를 갖는 환자에 대하여 전체 엉덩이 관절성형술절차를 설명한다. 그러나, 상기 예시적인 과정 및 시스템은 불완전한 인체가 있는 사례에 대량 맞춤화에 적절한 임의의 정형외과용 임플란트에 적용 가능함을 이해해야 한다. 예를 들어, 상기 예시적인 과정 및 시스템은 뼈 변성(부분적인 인체), 뼈 변형, 또는 부서진 뼈가 존재하는 견관절 치환술 및 슬관절 치환술에 적용가능하다. 따라서, 아래에서는 비록 엉덩이 임플란트의 대퇴골 요소에 대해서 논하지만, 당업자는 상기 시스템 및 과정을 본래의 정형외과용 또는 정형외과용 재수술과 함께 이용하기 위하여 기타의 정형외과용 임플란트, 가이드, 기구, 등에 적용할 수 있음을 이해할 것이다.
도 29를 참조하여, 대량 맞춤형 및 환자-맞춤형 모두를 위한 엉덩이 임플란트의 제작을 위하여 스태티스티컬 아틀라스를 이용하기 위한 전반적인 과정의 흐름을 설명한다. 우선, 상기 과정은 분석되는 하나 이상의 뼈에 대한 여러 사례를 포함하는 스태티스티컬 아틀라스를 포함한다. 예시적인 엉덩이 임플란트에 있어서, 상기 스태티스티컬 아틀라스는 상기 골반 뼈 및 상기 대퇴골 뼈의 뼈 모델에 대하여 여러 사례를 포함한다. 적어도 상기 비구 요소(즉, 비구) 및 상기 근위부 대퇴골 요소(즉, 대퇴골두)를 위하여 아티큘레이팅 표면 기하학적 구조 분석이 수행된다. 특히, 상기 아티큘레이팅 표면 기하학적 구조 분석은 상기 스태티스티컬 아틀라스의 특정 집단으로부터의 각각의 뼈에 대하여 표식자, 측정, 및 형상 특징의 계산을 수반한다. 또한, 상기 아티큘레이팅 표면 기하학적 구조 분석은 상기 계산을 나타내는 통계와 같은 정량적 값을 생성하는 것을 포함한다. 이들 계산으로부터, 상기 계산의 분포는 표시되고 상기 분포에 기초하여 분석된다. 종-형상의 분포에 있어서, 예를 들어, 상기 집단의 대략 90 퍼센트(90%)가 그룹화되어 비-환자-맞춤형 임플란트(예를 들면, 대량 맞춤형 임플란트)를 설계할 수 있고 이러한 그룹화에 적절히 맞을 수 있음을 관찰할 수 있고, 따라서 환자-맞춤형 임플란트에 비하여 환자의 비용을 절감할 수 있다. 상기 집단의 나머지 10 퍼센트(10%)에 대해서는, 환자-맞춤형 임플란트에 보다 잘 접근할 수 있다.
대량 맞춤형 임플란트에 있어서, 상기 스태티스티컬 아틀라스는 많은 상이한 군(즉, 상이한 임플란트)이 어떻게 특정 집단의 압도적 다수를 망라할 수 있는지에 대하여 정량적으로 평가하기 위하여 이용될 수 있다. 이들 정량평가는, 환자-맞춤형이 아니면서도 기성품(off-the-shelf) 대안보다는 더 특이적인 기본 임플란트 설계에 대하여 일반적인 파라미터를 나타내는, 데이터의 클러스터를 발생할 수 있다.
환자-맞춤형 임플란트에 있어서, 상기 스태티스티컬 아틀라스는 정상적인 뼈를 구현하는 것 및 환자의 뼈와 정상적인 뼈 사이의 차이를 정량적으로 평가하는 데에 이용될 수 있다. 더욱 구체적으로, 상기 스태티스티컬 아틀라스는 평균적인 뼈 모델 또는 템플릿 뼈 모델과 연관되는 곡률 데이터를 포함할 수 있다. 이러한 템플릿 뼈 모델은 그러므로 환자의 정확한 뼈 형태가 어떠할지를 추론하기 위하여 그리고 임플란트 절차의 수행에 이용되는 임플란트 및 수술 기구를 제작하기 위하여 이용될 수 있다.
도 30은 대량 맞춤형 및 환자-맞춤형 엉덩이 임플란트를 설계하는 데에 있어서의 스태티스티컬 아틀라스 이용을 도표로 요약한다. 임플란트 박스에 관련하여, 도 20 및 도 21 및 이들 도면에 관련된 설명을 다시 참조한다. 마찬가지로, 평면형 박스에 관련하여, 도 20 및 이와 연관된 상기 맞춤형 계획 인터페이스에 관한 설명을 다시 참조한다. 마지막으로, 환자-맞춤형 가이드 박스에 관련하여, 도 22 및 이 도면에 관련된 설명을 다시 참조한다.
도 31에 나타낸 바와 같이, 플로우챠트 성별 및/또는 민족성에 따른 맞춤형 엉덩이 임플란트의 설계 및 제작에 이용될 수 있는 예시적인 과정에 대하여 나타낸 것이다. 특히, 상기 과정은 대퇴골 근위부(즉, 대퇴골 대퇴골두 포함)의 다양한 표본으로서 남성 또는 여성의 것이며 그 사람의 민족성으로부터의 뼈가 관련된 민족성이 명시된 다양한 표본을 포함하는 스태티스티컬 아틀라스의 이용을 포함한다. 더욱이, 특정 성별 및/또는 민족성 집단에서 고유의 해부학적 변동성을 포착하기 위하여 상기 스태티스티컬 아틀라스 모듈은 하나 이상의 인체(예를 들면, 뼈)의 가상, 3D 모델을 기록한다. 예시적인 형태에서, 상기 아틀라스는, 공통적인 성별 및/또는 민족성(또는 해부학적 공통성이 존재하는 다수의 민족성 중 하나를 갖도록 그룹화될 수 있음)을 가질 수 있는 상기 특정 인체 집단에 대한 평균 표상으로서 및 상기 평균 표상에 관한 변화로서 나타나는, 상기 하나 이상의 인체의 인체 특징에 대한 수학적 표현을 기록한다. 도 2 및, 상기 스태티스티컬 아틀라스에 대하여 그리고 특정 집단에 대한 스태티스티컬 아틀라스에 인체를 어떻게 추가하는지에 대하여 앞서 설명된 바를 참조한다. 상기 스태티스티컬 아틀라스로부터의 출력은 자동 표식자 모듈 및 표면/형상 분석 모듈로 보내진다.
도 31-43을 참조하면, 상기 자동 표식자 모듈은 상기 스태티스티컬 아틀라스 내 인체의 각각의 경우에 대한 인체 표식자를 계산하기 위하여 상기 스태티스티컬 아틀라스(예를 들면, 특이적 표식자를 포함할 개연성이 높은 부위) 및 국소적인 기하학적 분석으로부터의 입력을 이용한다. 예를 들어, 다양한 대퇴골 근위부 표식자는 대퇴골의 각각의 3D 가상 모델에 대하여 계산되며 이는, 제한 없이, 다음을 포함한다: (1) 대퇴골두 중심, 이는 구에 가까운 대퇴골두의 중심점이다; (2) 대전자 포인트, 이는 상기 인체 경부 중심선에 수직인 경부축 포인트를 통과하는 평면에 대하여 최소거리를 갖는 대전자 상의 포인트이다; (3) 골절술 포인트, 상기 소전자의 단부로부터 15 밀리미터(상기 소전자 포인트로부터 대략 30 밀리미터)인 포인트이다; (4) 경부축 포인트, 이는 상기 최소 대퇴경부 단면 영역을 감싸는 접평면을 갖는 헤드 구(球) 상의 포인트이다; (5) 대퇴골 허리, 이는 상기 대퇴골축을 따라 최소 직경을 갖는 단면이다; (6) 골수강 허리, 이는 상기 골수강을 따라 최소 직경을 갖는 단면이다; (7) 대퇴경부 피벗 포인트, 이는 상기 대퇴골두 중심 및 상기 대퇴골 인체 축의 말단과 함께 상기 대퇴경부 각도와 동일 한 각도를 형성하는 상기 대퇴골 인체 축 상의 포인트이다; 그리고, (8) 소전자 포인트, 이는 외측으로 가장 돌출된 상기 소전자 부위 상의 포인트이다. 예를 더 들자면, 명시된 인체 표식자를 이용하여 대퇴골의 각각의 3D 가상 모델에 대하여 다양한 대퇴골 근위부 축이 계산되며 이는, 제한 없이, 다음을 포함한다: (a) 대퇴경부 인체 축, 이는 상기 대퇴골두 중심을 상기 대퇴경부 중심에 연결하는 라인과 동축이다; (b) 대퇴경부축, 이는 상기 대퇴골두 중심 포인트와 상기 대퇴경부 피벗 포인트를 연결하는 라인과 동축이다; 그리고, (c) 대퇴골 인체 축, 이는 상기 대퇴골의 근위부 단부로부터 시작하여 상기 전체 대퇴골 길이의 23 퍼센트 및 40 퍼센트의 거리에 놓이는 2개의 포인트를 연결하는 라인과 동축이다. 예를 좀 더 들자면, 명시된 인체 표식자를 이용하여 대퇴골의 각각의 3D 가상 모델에 대하여 다양한 대퇴골 근위부 치수가 계산되며 이는, 제한 없이, 다음을 포함한다: (i) 근위부 각도, 이는 대퇴골 인체 축과 대퇴경부 인체 축 사이의 3D 각도이다; (ii) 헤드 오프셋, 이는 상기 대퇴골 인체 축과 상기 대퇴골두 중심 사이의 수평 거리이다; (iii) 헤드 높이, 이는 상기 소전자 포인트(이전에 참조함)와 대퇴골두 중심 사이의 수직 거리이다; (iv) 대전자에서 헤드 센터까지의 거리, 이는 상기 헤드 센터와 상기 대전자 포인트(이전에 참조함) 사이의 거리이다; (v) 경부 길이, 이는 상기 헤드 센터와 상기 경부-피벗 포인트(이전에 참조함) 사이의 거리이다; (vi) 상기 헤드 노뼈, 이는 대퇴골두에 맞추어지는 구의 노뼈이다; (vii) 경부 직경, 이는 대퇴경부 인체 축에 법선방향이며 경부 중심 포인트(이전에 참조함)를 통과하는 평면에서 상기 경부 단면에 맞추어지는 원의 직경이다; (viii) 대퇴경부 전염각 과상간 각도, 이는 상기 과상간축과 대퇴경부축 사이의 각도이다; (ix) 대퇴경부 전염각 대퇴골 후과 각도, 이는 상기 대퇴골 후과축과 대퇴경부축 사이의 각도이다; (x) LPFA, 이는 기계축과 상기 대전자를 나타내는 벡터 사이의 각도이다; (xi) 새발톱형 인덱스 영역, 이는 다음의 방정식에 의하여 정의된다: (Z-X)/Z, 여기에서 Z는 상기 중간 소전자 포인트의 아래로 10 센티미터에 있는 대퇴골 영역이며, 그리고 X는 상기 중간 소전자 포인트의 아래로 10 센티미터에 있는 골수강 영역이다; (xii) 관 대퇴거 비율 영역, 이는 상기 중간-소전자 레벨 아래로 3 센티미터에 있는 상기 골수강 영역 대 상기 중간-소전자 아래로 10 센티미터에 있는 골수강 영역 사이의 비율이다; (xiii) XYR 영역, 이는 상기 중간-소전자 아래로 3 센티미터에 있는 골수강 영역 대 상기 중간-소전자 아래로 10 센티미터에 있는 골수강 영역 사이의 비율이다; (xiv) 단축/장축 축 비율, 이는 골수강 상의 가장 좁은 포인트에서 상기 골수강 단면에 맞춰지는 타원의 단축과 장축 사이의 비율이다; 그리고, (xv) 대퇴골 반경 대 골수강 반경 비율, 이는 상기 대퇴골 인체 축에 법선인 평면 내에서 상기 대퇴골 및 골수강의 외주의 둘레에 최상으로 맞춰지는 원을 이용한, 원 반경의 비율이다(이 비율은 상기 피질 뼈의 두께를 반영하며, 따라서, 골다공증의 경우 피질 뼈 손실을 반영한다).
도 31 및 도 45-47을 참조하여, 상기 자동 표식자 모듈로부터의 출력을 이용함으로써, 특정 집단에 대한 상기 대퇴골 스템의 파라미터를 평가한다. 특히, 민족성, 성별, 또는 이들 2가지의 조합, 내측 윤곽, 경부 각도, 및 헤드 오프셋에 따라 그룹화되는지에 무관하게 평가된다.
상기 내측 윤곽의 경우, 상기 집단 내에서 각각의 대퇴골에 대한 골수강에 관련하여 이러한 윤곽은 상기 대퇴골 피벗 포인트를 통하여 연장되며 상기 대퇴골 인체 축 및 상기 경부축 모두에 대하여 수직인 수직축을 갖는 평면으로 상기 골수강을 교차함으로써 생성된다(외적, vectors cross product). 상기 집단 내에서 각각의 대퇴골에 윤곽이 생성된 후, 상기 집단은 골수강 크기를 이용하여 여러 군으로 다시 나뉜다. 다시 나뉠 때, 상기 윤곽은 평면 밖으로 나갈 수 있으므로, 공통적인 평면(예를 들면, X-Z 평면)에 대하여 모든 윤곽을 정렬시키기 위하여 정렬 과정이 수행된다. 상기 정렬 과정은 상기 대퇴경부축 및 인체 축 모두에 대하여 수직인 축을 상기 Y축에 정렬하고 그리고 나서 상기 인체 축을 상기 Z축에 정렬하는 것을 포함한다. 이러한 방식으로, 모든 윤곽이 공통적인 좌표 프레임을 갖도록 하기 위하여 상기 윤곽을 특이적 포인트에 대하여 이동시킨다.
상기 윤곽이 공통적인 좌표 프레임을 갖게 된 후, 상기 윤곽의 포인트가 평면 내에 있는지를 확인하기 위하여 상기 대퇴경부 포인트가 이용된다. 특히, 상기 대퇴경부 포인트는 실제 인체를 반영하고 상기 윤곽 상의 포인트가 평면 내에 있음을 보장하는 일관된 포인트이다. 상기 윤곽의 포인트가 평면 내에 있음을 확인함으로써, 집단 대퇴골 간의 정렬 변동성을 크게 감소시킬 수 있고, 이는 헤드 오프셋의 윤곽 및 임플란트 각도 설계의 이용을 용이하게 한다.
도 48을 참조하면, 상기 스태티스티컬 아틀라스는 또한 정상적인 뼈와 골다공증성 뼈 사이의 보간에도 유용할 수 있다. 대퇴골 스템을 설계 및 사이징할 때, 핵심 고려사항 중 하나는 골수강 치수이다. 정상적인 뼈의 경우에, 상기 대퇴골에서 상기 골수강은 골다공증을 보이는 대퇴골에 비교하여 크게 더 좁다. 이렇게 더 좁은 골수강 치수는, 적어도 부분적으로는, 뼈 두께(상기 대퇴골의 주축에 대하여 가로방향으로 측정됨) 감소의 결과로서, 이는 상기 골수내 채널을 묘사하는 상기 대퇴골 내표면의 후퇴로 상응하게 이어진다. 이러한 방법에서, 건강한 뼈 두께와 심각하게 골다공증성인 뼈 두께 사이의 보간에 의하여 그리고 상기 두께를 갖는 가상의 3D 모델을 생성함에 의하여 합성 집단을 제작한다. 이러한 데이터 세트는 그러므로 상이한 골다공증 단계에 해당하는 뼈를 포함한다. 이러한 데이터 세트는 이제 임플란트 스템 설계에 입력으로서 이용될 수 있다.
예시적인 형태에서, 상기 스태티스티컬 아틀라스는 정상적인, 비-골다공증성 뼈 및 골다공증성 뼈의 집단을 포함하며, 이 경우 상기 뼈는 대퇴골이다. 상기 아틀라스 이들 정상적인 대퇴골 각각은, 여기에서 스태티스티컬 아틀라스에 뼈를 추가하기 위하여 설명된 과정에 따라, 정량화되고 3D 가상 모델로서 나타내어진다. 마찬가지로, 상기 아틀라스의 골다공증성 뼈 각각은, 여기에서 스태티스티컬 아틀라스에 뼈를 추가하기 위하여 설명된 과정에 따라, 정량화되고 3D 가상 모델로서 나타내어진다. 정상적인 뼈와 골다공증성 뼈에 대한 상기 3D 모델의 일부로서, 골수강 치수가 상기 대퇴골의 길이방향 길이를 따라 기록된다. 아틀라스 포인트 관련성을 이용하여, 상기 소전자 근위부의 전반적인 뼈 길이의 고정된 퍼센트(말하자면, 5%) 및 상기 말단 피질 포인트에 근위부인 제 2 고정 퍼센트(말하자면, 2%)를 스패닝(spanning)함으로써, 상기 골수강이 상기 아틀라스 뼈 상에서 명시된다. 더욱이, 이들 근위부 및 원위부 내의 뼈 외표면의 포인트는 뼈 두께를 결정하는 데에 이용되며, 이는 상기 외부 포인트로부터 상기 IM 관 상의 가장 가까운 포인트까지의 거리로 정의된다.
대퇴골 근위부에 있어서, 도 51-62는 임의의 민족성 집단 전체에 성별차이가 존재함을 확인해준다. 도 59 및 도 60에 나타낸 바와 같이, 여성의 대퇴골 근위부에 대한 상기 스태티스티컬 아틀라스의 템플릿 3D 모델은 남성의 대퇴골 근위부의 템플릿 3D 모델에 비하여 중요한 통계적 측정치를 보인다. 특히, 상기 헤드 오프셋은 남성보다 여성이 대략 9.3% 더 작다. 현재의 임플란트에서 헤드 오프셋은 스템 크기와 함께 증가되며, 이는 정상적인 여성 경우에 가능하게 된다. 그러나, 뼈 손실이 골수강 크기의 증가로 이어지는 골다공증 및 골감소증의 경우 헤드 오프셋을 고려하면 문제가 발생되는데, 이는 보다 큰 스템 크기 및 보다 큰 오프셋을 의미한다. 마찬가지로, 상기 경부 직경 및 헤드 노뼈는 남성의 경우보다 여성의 경우 대략 11.2% 더 작다. 그리고, 상기 경부 길이는 남성의 경우보다 여성의 경우 대략 9.5% 더 작다. 또한, 상기 근위부 각도는 남성의 경우보다 여성의 경우 대략 0.2% 더 작다. 마지막으로, 상기 대퇴골두 높이는 남성의 경우보다 여성의 경우 대략 13.3% 더 작다. 따라서, 포괄적인, 대퇴골 임플란트(즉, 성별 중립적)를 단순히 스케일링 하는 것은 뼈 기하학에 있어서의 차이를 고려하지 않으며 따라서 성별에 기초한 대퇴골 임플란트가 필요하다는 것을 상기 성별에 따른 뼈 데이터로부터 확인할 수 있다.
도 63-68을 참조하면, 상기 대퇴골 근위부의 치수뿐만 아니라 상기 대퇴골의 단면 형상을 상기 골수강의 길이를 따라 젠더라인 전체에 걸쳐 광범위하게 변화시킨다. 특히, 남성 및 여성 대퇴골의 스태티스티컬 아틀라스 내에서 특정 집단 전체에 걸쳐, 남성은 여성보다 더욱 원형에 가까운 골수강 단면을 갖는다. 더욱 구체적으로, 여성은 남성보다 8.98% 더욱 편심인 골수강 단면을 갖는다. 이하에서 더욱 상세히 설명하는 바와 같이, 이러한 성별에 따른 맞춤형 데이터는 클러스터에 이르도록 표시되는 특징추출 데이터의 일부로 이루어지며, 그로부터 다수의 일반적인 형상 파라미터가 추출되어 성별에 따른 맞춤형 대퇴골 임플란트에 이르게 된다.
도 72-74에 나타낸 바와 같이, 상기 스태티스티컬 아틀라스는 전-후(AP) 방향 헤드 센터 오프셋에 관하여 대퇴골(성별에 따라 구분)의 특정 집단 전체에 걸친 측정에 해당하는 계산을 포함한다. 예시적인 형태에서, AP 방향은 상기 기계적인 축 및 상기 후부과축 모두에 대하여 전방으로 직각으로 나타나는 벡터에 의하여 결정하였다. 오프셋은, 상기 인체 축의 중간점인 제 1 참조점 및 상기 대퇴경부 피벗 포인트인 제 2 참조점을 이용하여, 상기 대퇴골두 중심과 상기 2개의 참조점 사이에서 측정하였다. 요약하자면, 상기 경부 피벗 포인트 및 인체 축 중간점에 대한 AP 헤드 높이는 남성 및 여성 대퇴골 사이에 중요한 차이를 보이지 않았다. 다시, 이러한 성별에 따른 맞춤형 데이터는 클러스터에 이르도록 표시되는 특징추출 데이터의 일부로 이루어지며, 그로부터 다수의 일반적인 형상 파라미터가 추출되어 성별에 따른 맞춤형 대퇴골 임플란트에 이르게 된다.
다시 도 28 및 도 31을 참조하면, 상기 헤드 센터 오프셋, 상기 골수강의 단면 형상 데이터, 및 상기 스태티스티컬 아틀라스 집단 내에서 상기 대퇴골에 대한 내측 윤곽 데이터는, 도 28에 대한 플로우챠트 및 관련 설명과 일치하는 성별 및/또는 민족성에 따른 맞춤형, 대량 맞춤형 임플란트를 설계하기 위하여(각각의 뼈에 연관된 상기 민족성에 대한 데이터를 상기 스태티스티컬 아틀라스가 포함하는 것으로 간주하여, 하나는 성별에 따른 맞춤형으로 두 번째 것은 민족성에 따른 맞춤형으로), 특정 집단 전체에 걸쳐 존재하는 다수의 클러스터를 파악하도록 표시되는 상기 추출된 특징 데이터의 일부로 이루어진다. 성별 및/또는 민족성에 따른 맞춤형인 명시된 클러스터는 대량 맞춤형 대퇴골 임플란트를 설계하는 데에 필요한 파라미터를 추출하기 위하여 이용된다.
도 76을 참조하여, 본 개시에 의한 예시적인 대량-맞춤화 대퇴골 요소를 설명한다. 특히, 상기 대량-맞춤화 대퇴골 요소는 볼, 경부, 근위부 스템, 및 말단 스템을 포함하는 4가지 일차 요소로 이루어진다. 각각의 상기 일차 요소는 교체 가능한 볼, 경부, 및 스템이 기타 교체 가능한 요소로 교체 가능하도록 교체 가능한 인터페이스를 포함한다. 이러한 방식으로, 보다 큰 대퇴골 볼이 필요하면, 상기 대퇴골 볼만을 교체한다. 마찬가지로, 보다 큰 경부 오프셋이 요구되면, 상기 경부 요소를 필요한 오프셋을 제공하는 상이한 경부 요소로 교체하고, 반면에 나머지 3가지 요소는 적절하다면 그대로 유지한다. 이러한 방식으로, 상기 대퇴골 요소는, 어느 정도의 제한 범위 내에서, 상기 맞춤성 또는 운동학을 포기할 필요 없이 환자에게 맞도록 맞춤될 수 있고, 그렇지 않다면 보편적으로 적용될 수 있는 임플란트를 이용함에 의하여 상기 맞춤성 또는 운동학은 포기된다. 따라서, 모든 상기 대퇴골 요소는 환자 인체에 더욱 잘 맞도록 기타의 대량 맞춤형 요소로 교체될 수 있다.
예시적인 본 실시 예에서, 상기 경부는 상기 근위부 스템의 축에 대하여 회전하는 구조로 되어, 상기 근위부 스템에 대한 상기 경부의 회전 방향은 수술-중에 조정될 수 있다. 특히, 수술 전 측정은 상기 근위부 스템에 대하여 상기 경부의 계획된 회전 위치를 설정할 수 있다. 그럼에도 불구하고, 생체 내 운동학적인 테스팅과 같은 수술중의 고려사항은 상기 외과 전문의로 하여금 개선된 운동학 또는 특정 충돌의 회피를 제공하기 위하여 상기 수술 전의 회전 방향을 변경하도록 하는 결과를 초래한다. 예를 들어, 상기 경부는 구조화 표면을 갖는 삽입된 원주방향 홈을 갖는 원통형 스터드를 포함한다. 이러한 원통형 스터드는 상기 근위부 스템의 축방향 원통형 채널 내에 수용된다. 이러한 원통형 채널에 더하여, 제 2 채널은 상기 원통형 채널을 교차하고, 상기 삽입된 원주방향 홈의 구조화된 표면에 결합되도록 역시 구조화되어 이루어진 반-원형 홈을 갖는 플레이트를 수용하는 형상으로 된다. 상기 근위부 스템의 고정된 1쌍의 나사는 상기 원통형 스터드와 맞물리도록 상기 플레이트를 밀어내므로, 궁극적으로, 상기 근위부 스템에 대한 상기 원통형 스터드의 회전 운동은 더 이상 불가능하게 된다. 따라서, 이렇게 고정된 맞물림에 이르게 될 때, 상기 나사는, 수술-중에 회전 조정을 가능하게 할 필요가 있을 때처럼, 상기 원통형 스터드와 상기 근위부 스템 사이에 회전 운동을 허용하도록 느슨하게 될 수 있다.
상기 경부와 볼 사이의 맞물림은 평범할 수 있으나, 반면에 상기 근위부 스템과 상기 말단 스템 사이의 맞물림은 이례적이다. 특히, 상기 근위부 스템은 나사산이 마련되는 말단 섕크를 포함하며, 이는 상기 말단 스템 내로 연장되는 나사산이 마련된 개구부 내에 나사삽되도록 맞물린다. 따라서, 상기 근위부 스템은 상기 말단 스템에 대한 상기 근위부 스템의 회전에 의하여 상기 말단 스템에 장착되므로, 상기 섕크의 나사산은 상기 말단 스템 개구부의 나사산에 맞물린다. 상기 말단 스템에 대한 상기 근위부 스템의 회전은 상기 근위부 스템이 상기 말단 스템에 인접하게 될 때 종료된다. 그러나, 상기 근위부 스템과 상기 말단 스템 사이에 회전 조정이 필요하게 되면, 상기 정확한 회전 조정에 상응하는 스페이서를 제공하기 위하여 와셔를 이용할 수 있다. 예를 더 들자면, 더 큰 회전 조정이 필요하면, 상기 와셔는 두께가 더 커지게 되고, 반면에 더욱 가는 와셔는 더 작은 회전 조정에 상응하게 제공된다.
각각의 상기 일차 요소는 특정 성별 및/또는 민족성 내에서 크기 및 윤곽 변화를 고려한 소정의의 대안으로 생성될 수 있다. 이러한 방식으로, 종래의 대량 맞춤형 대퇴골 요소보다 환자의 인체에 더욱 가까운 구조를 이루는 환자-맞춤형 임플란트에 가깝게 상기 일차 요소의 대안은 짜 맞춰질 수 있으나, 환자-맞춤형 대퇴골 임플란트를 제작하는 데에는 아주 적은 비용 및 과정이 이용된다.
도 77은 본 개시에 의한 다른 대안적인 예시적인 대량-맞춤형 대퇴골 요소를 나타낸다. 특히, 상기 대량-맞춤화 대퇴골 요소는 볼, 경부, 근위부 스템, 중간 스템, 및 말단 스템의 5가지 일차 요소로 이루어진다. 각각의 상기 일차 요소는 교체 가능하다 볼, 경부, 및 스템이 기타의 교체 가능한 요소로 교체 가능하도록 교체 가능하다 인터페이스를 포함한다. 당업자는 상기 대량-맞춤화 대퇴골 요소 중 이러한 요소의 수를 증가시킴으로써, 이러한 뼈를 재생하기 위하여 상기 환자의 자연 대퇴골의 슬라이스를 적층하는 것처럼, 대량-맞춤화 요소를 이용하여 환자-맞춤형 임플란트의 맞춤성을 높이도록 접근할 수 있음을 이해할 것이다.
상기 대퇴골 근위부에 있어서 성별간 및 민족성간에 인체 차이가 있는 것과 마찬가지로, 도 78-83은 스태티스티컬 아틀라스 내 일반적인 골반 집단 전체에 걸쳐 성별 및 민족성 차이가 존재함을 확인한다. 다시 도 28을 참조하면, 일련의 대량 맞춤형 비구컵 임플란트는 적어도 하나의 성별 및 민족성에 기초하여 그룹화된 스태티스티컬 아틀라스 데이터(즉, 골반 집단)를 이용함으로써 설계되고 제작된다. 상기 그룹화된 아틀라스 데이터는, 도 78에 사실적으로 나타낸 바와 같이, 상기 집단 내에서 비구컵의 기하학적 구조를 고립시키기 위하여 자동 표식 과정 및 표면/형상 분석 과정을 거친다. 또한, 도 82 및 도 83에 사실적으로 나타낸 바와 같이, 상기 표식자(비구 인대의 위치에 대한) 및 윤곽 분석(상기 비구컵의 윤곽을 평가하기 위한) 과정은, 도 79에 나타낸 바와 같이, 특징추출로 이어지고, 그로부터 상기 인체 컵 임플란트 표면이 궁극적으로 제작된다. 이러한 분석은, 도 80 및 도 81에 나타낸 바와 같이, 상기 비구컵 및 대퇴골두이 단일의 곡률 반경으로 이루어지지 않고 여러 반경으로 이루어짐을 보여준다.
동물-특이적 임플란트의 제작
도 85를 참조하면, 동물-특이적(즉, 동물을 위한 환자-맞춤형) 임플란트 및 관련 기기의 설계 및 제작을 위한 예시적인 시스템 및 방법은 도 20에 관하여 앞서 설명되고 묘사된 과정과 유사며, 이는 이에 결부되어 있다. 시작 단계로, 동물 인체의 영상을 취하여 가상의 3D 뼈 모델을 생성하기 위하여 이를 자동으로 분할한다. 비록 CT 스캔 영상으로 사실적으로 나타내었으나, MRI, 초음파, 및 X-선과 같이 CT이외에 기타의 영상화 방법 또한 제한 없이 이용할 수 있음은 이해될 것이다. 질병이 있는 인체의 가상의 3D 뼈 모델은 앞서의 예시적인 개시 내용에 따라 상기 스태티스티컬 아틀라스에 로딩된다. 그 후, 상기 스태티스티컬 아틀라스로부터의 입력은 상기 뼈(들)를 재건하고 재건된 가상의 3D 뼈 모델을 제작하기 위하여 이용된다. 뼈 표식자는 정확한 임플란트 크기를 결정할 수 있도록 상기 재건된 가상의 3D 뼈 모델의 표면 상에서 계산된다. 그리고 나서, 질병이 있는 뼈의 기하학적 구조는 맵핑되고 파마리터 형식으로 전환되며, 이는 그리하여 잔여 인체 기하학적 구조를 모방하는 동물-특이적 임플란트를 제작하는 데에 이용된다. 상기 동물-특이적 임플란트에 더하여, 동물-특이적 기구를 제작하여 상기 동물의 잔여 뼈 준비 및 상기 동물-특이적 임플란트의 배치를 위하여 이용한다.
도 86을 참조하면, 대량 맞춤형 동물 임플란트의 설계 및 제작을 위한 예시적인 시스템 및 방법은 도 28에 대하여 앞서 묘사되고 설명된 과정과 유사하고, 이는 여기에 결부된다. 당해 뼈(들)에 적절한 상기 스태티스티컬 아틀라스로부터의 3D 동물 뼈 모델은 자동 표식 및 표면/형상 분석을 거친다. 상기 자동 표식 과정은 각각의 3D 동물 뼈 모델에 대한 인체 표식자를 자동으로 계산하기 위하여 상기 아틀라스에 저장된 정보(예를 들면, 특이적 표식자를 포함할 개연성이 높은 부위) 및 국소적인 기하학적 분석을 이용한다. 상기 스태티스티컬 아틀라스 내에서 당해 각각의 동물 뼈에 대하여, 상기 형상/표면 분석은 상기 3D 가상 동물 뼈 모델의 특징, 표면 기하학적 구조를 직접적으로 추출한다. 그 후, 각각의 상기 3D 동물 뼈 모델은 그에 대하여 수행되는 특징추출 과정을 가지며, 이는 임플란트 설계에 관련된 특징을 계산하기 위하여 표식자와 형상 특징의 조합을 이용한다. 이들 특징은 클러스터링 과정에 대한 입력으로서 이용되며, 여기에서 상기 동물 뼈 집단은 소정의의 클러스터링 방법을 이용하여 유사한 특징을 갖는 군으로 구분된다. 그 결과적인 각각의 클러스터는 단일의 동물 임플란트의 형상 및 크기를 정의하기 위하여 이용되는 사례들을 나타낸다. 전반적인 임플란트 모델의 파라미터(예를 들면, 캐드(CAD) 파라미터)를 추출하기 위하여 파라미터화 과정은 각각의 클러스터 중심(임플란트 크기)에 대하여 이어진다. 그 후, 상기 추출된 파라미터를 이용하여, 각각의 클러스터에 대하여 상기 전반적인 임플란트 표면 및 크기가 제작된다. 상기 동물 환자가 속하는 상기 클러스터에 따라, 상기 대량-맞춤화 임플란트는 필요한 군으로부터 선택되어 임플란트로 된다.
환자-맞춤형 절단 가이드의 제작
도 87-102를 참조하면, 예시적인 과정 및 시스템은 환자-맞춤형 절단 가이드의 설계를 위하여 다차원 의료 영상, 캐드(CAD), 및 컴퓨터 그래픽스 특징의 통합을 위하여 설명된다. 단지 예시적인 설명을 위하여, 상기 환자-맞춤형 절단 가이드는 전체 엉덩이 관절성형술절차에 관하여 설명된다. 그럼에도 불구하고, 당업자는 상기 예시적인 과정 및 시스템을 절단 가이드가 이용될 수 있는 임의의 수술 절차에 적용 가능할 수 있다는 것을 이해할 것이다.
도 87에 나타낸 바와 같이, 상기 예시적인 시스템 흐름의 개요는 인체를 나타내는 입력 데이터의 수신으로부터 시작된다. 입력된 인체 데이터는 당해 인체의 2차원적(2D) 영상 또는 3차원적(3D) 표면 표시로 이루어지며, 이는, 예를 들어, 표면 모델 또는 포인트 클라우드의 형식으로 될 수 있다. 2D 영상이 이용되는 경우, 이들 2D 영상은 당해 인체의 3D 표면 표시를 구성하기 위하여 이용된다. 당업자는 3D 표면 표시를 구성하기 위한 2D 영상의 이용에 익숙하다. 따라서, 이러한 과정에 대한 상세한 설명은 간결성을 도모하기 위하여 생략된다. 예를 들어, 입력된 인체 데이터는 하나 이상의 X-선(적어도 2개의 관점으로부터 취함), 컴퓨터 단층촬영(CT) 스캔, 자기 공명 영상(MRI), 또는 기타 영상화 데이터로 이루어질 수 있고, 이들로부터 3D 표면 표시의 제작이 가능하다. 예시적인 형태에서, 상기 인체는 골반 및 대퇴골로 이루어진다.
그러나, 다음은 예시적인 시스템과 함께 이용 가능한 인체에 대한 예시적인 설명이고, 본 발명 시스템과 사용되는 것으로부터 기타의 인체를 제한할 의도는 없는 것임을 이해해야 한다. 여기에서 이용된 바, 생체조직은 뼈, 근육, 인대, 힘줄, 및 다세포 생물에서 특정 기능으로 갖는 기타 명백한 종류의 구조적 물질을 포함한다. 따라서, 상기 예시적인 시스템 및 방법이 고관절을 수반하는 뼈의 문맥에서 논의될 때, 당업자는 상기 시스템 및 방법이 기타의 생체조직에도 적용 가능함을 이해할 것이다.
상기 시스템의 대퇴골 및 골반 입력된 인체 데이터는 입력 데이터의 유형에 따라 2개의 모듈 중 하나에로 보내진다. X-선 데이터의 경우, 상기 2D X-선 영상은 3D 뼈 윤곽을 추출하기 위하여 비강체 모듈에 입력된다. 상기 입력 데이터가 CT 스캔 또는 MRI 영상의 형태로 되는 경우, 이들 스캔/영상은 상기 3D 뼈 윤곽(및 3D 연골 윤곽)을 추출하기 위하여 상기 스캔/영상이 자동으로 분할되는 자동 분할 모듈로 보내진다.
도 88을 참조하면, 상기 비강체 모듈은 하나 이상의 전처리 단계를 거치는 적어도 2개의 상이한 관점으로부터 취한 다중 X-선 영상을 이용한다. 이들 단계는 다음 중 하나 이상을 포함할 수 있다: 노이즈 감소 및 영상 강화. 상기 결과적인 전처리된 X-선 영상은 상기 X-선 영상을 정합하기 위하여 수정 단계를 거친다. 바람직하기로는, 상기 X-선 영상은 고정된 위치 수정 장치의 존재 하에 취하여 상기 X-선 영상이 이러한 고정된 위치 수정 장치에 대하여 정합된다. 그러나, 고정된 위치 수정 장치가 상기 X-선 영상에 없을 때에는, 상기 영상은 그럼에도 불구하고 다중 영상 전체에 걸쳐 공통적으로 검출된 특징을 이용하여 수정될 수 있다. 이러한 수정 과정으로부터의 출력은 상기 영상장치에 대한 상기 인체의 위치이며, 이는 도 88에서 "자세(pose)" 참조에 의하여 명시된다.
상기 결과적인 전처리된 X-선 영상은 특징추출 단계를 거친다. 이러한 특징추출 단계는 상기 전처리된 X-선 영상을 이용하는 영상 특징에 대한 하나 이상의 계산으로 이루어진다. 예를 들어, 이들 계산은 구배 특징, 윤곽, 조직 요소, 또는 기타 영상 유래 특징을 포함할 수 있다. 이러한 예시적인 과정에서, 상기 특징추출 단계는, 도 88에서 "윤곽" 참조로 나타낸 바와 같이, 상기 인체(예를 들면, 뼈 형상)뿐만 아니라 상기 "조직" 참조에 의하여 나타낸 바와 같은 영상 특징의 개요를 출력하며, 이들은 상기 X-선 영상으로부터 유래된다. 상기 개괄적인 인체 및 영상 특징 데이터는 모두 비강체 정합 단계로 보내진다.
상기 비강체 정합 단계는 상기 특징추출 단계 및 상기 수정 단계로부터의 출력을 스태티스티컬 아틀라스로부터의 당해 인체의 3D 템플릿 모델에 정합한다. 예를 들어, 상기 3D 템플릿 모델은 상기 스태티스티컬 아틀라스의 일부로 이루어지는 인체 데이터베이스로부터의 비-선형 주요 요소에 따라 제작된다. 상기 비강체 정합 단계 중에, 상기 3D 템플릿 모델은 상기 포즈, 윤곽, 및 조직 데이터로부터 기인하는 상기 X-선 영상의 형상 파라미터에 최적화된 그의 형상 파라미터(비-선형 주요 요소)를 갖는다. 상기 비강체 정합 단계로부터의 출력은 3D 환자-맞춤형 뼈 모델이며, 이는, 상기 CT 스캔 또는 MRI 영상에 대하여 상기 자동 분할 모듈로부터 출력된 3D 환자-맞춤형 뼈 모델 출력과 마찬가지로, 가상 템플레이팅 모듈로 보내진다.
도 91을 참조하면, 상기 자동 분할 과정은 상기 CT 스캔 또는 MRI 영상을 취함으로써, 예를 들어, 및 자동 분할 순서를 수행함으로써 시작된다. 특히 도 90을 참조하면, 상기 자동 분할 순서는 상기 스캔/영상을 당해 인체의 기본 또는 시작 3D 모델에 대하여 정렬하는 것을 포함한다. 상기 스캔/영상을 상기 기본 3D 모델에 정렬한 후, 상기 정상적인 벡터를 계산하기 위하여, 상기 프로파일 포인트의 위치를 결정하기 위하여, 상기 밝기 값을 선형보간하기 위하여, 그 결과적인 프로파일을 Savitsky-Golay 필터를 이용하여 필터링하기 위하여, 상기 프로파일의 구배를 생성하기 위하여, 가우시안 가중치 프로파일 방정식을 이용하여 상기 프로파일에 가중치를 부여하기 위하여, 상기 최대 프로파일을 결정하기 위하여, 그리고 상기 기본 3D 모델의 변형을 위해 이들 최대 프로파일을 이용하기 위하여, 상기 스캔/영상을 초기 변형과정을 통하여 처리한다. 그 결과적인 변형 3D 모델을 당해 인체에 대한 스태티스티컬 아틀라스로부터 상기 템플릿 3D 모델에 투사한다. 상기 템플릿 3D 모델의 파라미터를 이용함으로써, 상기 변형 3D 모델은 상기 템플릿 3D 모델 특유의 특징을 닮도록 2차 변형 과정에서 더욱 변형된다. 이러한 후자의 변형 과정 이후, 중요한 차이가 있는지를 확인하기 위하여 상기 변형 3D 모델을 상기 스캔/영상에 비교한다.
상기 변형 3D 모델과 상기 스캔/영상 사이에 상당한 차이가 존재하는 경우, 상기 변형 3D 모델 및 상기 스캔/영상은 상기 초기 변형 과정을 다시 거치며, 이어서 2차 변형 과정을 거친다. 이러한 루핑 과정은 상기 변형 3D 모델이 상기 변형 3D 모델과 상기 스캔/영상 사이의 차이에 대한 소정의 허용차 이내로 될 때까지 계속된다.
이전에 이루어진 반복 또는 최대수의 반복에 대하여 상기 변형 3D 모델이 차이를 덜 보인다고 결정된 후, 상기 변형 3D 모델의 표면 경계는 평활화되고, 이는 평활화된 3D 모델을 제작하기 위하여 상기 표면을 더욱 평화화하도록 보다 높은 해상도 리메싱 단계로 이어진다. 이렇게 평활화된 3D 모델은 3D 분할된 뼈 모델을 제작하기 위하여 초기 변형 순서(표면 평활화에 앞선 이전의 초기 변형 과정과 동일)를 거친다.
다시 도 91을 참조하면, 상기 3D 분할된 뼈 모델은 윤곽을 생성하기 위하여 처리된다. 특히, 상기 3D 분할된 뼈 모델과 상기 스캔/영상의 교차점이 계산되고, 이는 각각의 영상/스캔 평면에서 이진 윤곽(binary 윤곽)으로 귀결된다.
상기 3D 분할된 뼈 모델은 또한 환자-맞춤형인 상기 뼈 외형의 스태티스티컬 3D 모델을 생성하기 위하여 처리된다. 특히, 상기 뼈 및 임의의 인체 이상(abnormality)의 외형은 상기 윤곽 내 및 상기 윤곽 외에 존재하는 영상 정보에 기초하여 모델화된다.
상기 뼈 윤곽은 그 후 상기 분할 시스템의 사용자에 의하여 검토된다. 이러한 사용자는 상기 분할 시스템의 분할 전문가 또는 드믄 사용자로 될 수 있고, 상기 분할된 부위와 연관성이 없는 상기 3D 모델의 하나 이상의 영역에 주목한다. 이러한 연관성의 부족은 결손 부위 또는 확실히 부정확한 부위에 존재할 수 있다. 하나 이상의 에러 부위를 명시함에 따라, 상기 사용자는 상기 에러 부위가 존재하는 영역의 중심을 가리키는 모델 상에 "씨드 포인트"를 선택할 수 있고, 또는 수동으로 상기 결손 부위를 아우트라인 처리할 수 있다. 상기 시스템의 소프트웨어는 CT 또는 MRI로부터의 인체 초기 스캔/영상을 이용하여 상기 씨드 포인트 위치를 표시하는 윤곽에 상기 씨드 포인트를 가감하는 데에 이용한다. 예를 들어, 사용자는 골극이 있어야 하는 부위를 선택할 수 있고 상기 소프트웨어는 상기 골극을 상기 분할 순서에 추가하기 위하여 상기 스캔/영상을 상기 3D 모델 상의 부위와 비교한다. 상기 3D 모델에 가해지는 변화는 상기 사용자에 의하여 궁극적으로 검토되어 확인되거나 무효로 된다. 이러한 검토 및 수정 순서는 상기 스캔/영상과 상기 3D 모델 사이의 인체 차이를 고려할 필요가 있는 만큼 수차례 반복될 수 있다. 상기 사용자가 상기 3D 모델에 만족하면, 그 결과적인 모델은 브리지를 제거하기 위하여 수동으로 조작될 수 있고 상기 가상 템플레이팅 모듈에 출력하기 전에 필요에 따라 상기 모델의 영역에 마무리 손질을 하도록 조작될 수 있다.
도 87 및 도 92에 나타낸 바와 같이, 상기 가상 템플레이팅 모듈은 상기 자동 분할 모듈 및 상기 비강체 정합 모듈 중 어느 하나 또는 모두로부터 3D 환자-맞춤형 모델을 수신한다. 고관절에 있어서, 상기 3D 환자-맞춤형 모델은 상기 골반 및 상기 대퇴골을 포함하며, 이들은 모두 자동 표식 과정에 입력된다. 이러한 자동 표식 단계는 스태티스티컬 아틀라스 및 국소적인 기하학적 검색에 존재하는 유사한 인체로부터의 부위를 이용하여 상기 대퇴골 및 골반 3D 모델 상의 임플란트 배치와 관련된 인체 표식자를 계산한다.
말단 고정을 이용하여 상기 대퇴골 스템의 자동 배치에 있어서, 도 93에 나타낸 바와 같이, 상기 자동 표식자는 상기 대퇴골 및 상기 임플란트 상의 축을 정의하는 것을 포함한다. 상기 대퇴골에 관련하여, 상기 인체 대퇴골축(AFA)이 계산되고, 이어서 상기 근위부 인체 축(PAA)을 계산한다. 그리고나서, 상기 근위부 경부 각도(PNA)가 계산되고, 이는 상기 AFA와 PNA 사이의 각도로서 정의된다. 상기 대퇴골 임플란트에 있어서, 상기 임플란트 축은 상기 임플란트 스템의 길이를 따라 있고 및 상기 임플란트 경부축은 상기 임플란트 경부를 길이를 따라 있다. 상기 대퇴골의 PNA와 마찬가지로, 상기 임플란트 각도는 상기 임플란트 축과 상기 임플란트 경부축 사이의 각도로서 정의된다. 그리하여, 상기 임플란트는 상기 PNA에 가장 가까운 임플란트 각도를 갖도록 선택된다. 그러므로, 상기 임플란트 맞춤 각도(IF A)는 상기 선택된 임플란트 각도로 상기 대퇴골두 중심으로부터 이끌어낸 벡터로써 상기 근위부 인체 축의 교차점으로서 정의된다.
말단 고정 및 상기 계산된 인체 표식자를 이용하여 상기 대퇴골 스템의 자동 배치를 이용할 때, 도 93에 나타낸 바와 같이, 임플란트 사이징 단계는 대퇴골 요소를 위한 적합한 임플란트 크기에 대하여 결정/추정된다. 상기 임플란트 크기는 상기 임플란트의 폭을 상기 골수강의 폭에 비교함으로써 그리고 상기 골수강에 가장 비슷한 폭을 갖는 임플란트를 선택함으로써 선택된다. 그 후, 상기 시스템을 임플란트 배치 단계를 향하여 전방으로 이동시킨다.
말단 고정 대퇴골 스템의 임플란트 배치 단계에서, 외과 전문의의 바람직한 수술 기술 및 미리 계산된 인체 표식자에 기초하여, 상기 초기 임플란트 위치는 관련된 모든 임플란트될 요소에 대하여 결정/선택된다. 상기 대퇴골 근위부 골절술을 시뮬레이션하기 위하여 절제 평면이 생성되고 상기 임플란트 맞춤성(fit)이 평가된다. 상기 임플란트 축을 따라 가변적인 레벨로 상기 정렬된 임플란트 및 대퇴골 골수강의 단면을 분석함으로써 맞춤성 평가가 수행된다. 상기 임플란트 축을 인체 대퇴골축에 정렬하고 그리고나서 상기 임플란트를 이동시킴으로써 상기 임플란트가 상기 대퇴골에 정렬되어, 상기 임플란트의 경부가 상기 대퇴골 근위부 경부의 일반적인 위치에 위치된다. 그리고나서 상기 임플란트는 바람직한 전염각을 달성하도록 인체 대퇴골축에 대하여 회전된다.
이러한 임플란트 배치 단계의 일부로서, 반복 계산법을 이용하게 되며, 이는 "경험에서 비롯된 추측"의 배치를 평가하기 위하여 운동학적 모의시험의 일부로서 임플란트 배치에 관한 초기 "경험에서 비롯된 추측"을 이용하는 것을 포함한다. 예시적인 형태에서, 추정되었거나 또는 측정된 관절 운동학을 이용함으로써 상기 임플란트(상기 선택된 임플란트의 배치에 기초하여)에 대한 운동학적 모의시험이 관절 가동 범위를 통하여 이루어진다. 따라서, 상기 운동학적 모의시험은 충돌 위치를 결정하고 상기 임플란트 이식 후의 결과적인 관절 가동 범위를 추정하는 데에 이용될 수 있다. 상기 운동학적 모의시험의 결과 데이터가 만족스럽지 못한 경우(예를 들면, 만족스럽지 못한 관절 가동 범위, 자연스러운 운동학의 만족스럽지 못한 흉내, 등)에는, 만족스러운 결과에 이를 때까지 임플란트 배치에 대한 다른 위치를 이용할 수 있고 이에 운동학적인 분석을 취하여 상기 임플란트 배치를 더욱 개선할 수 있다. 관련된 모든 임플란트될 요소에 대하여 임플란트 위치를 결정/선택한 후, 상기 템플릿 데이터는 지그 제작 모듈로 보내진다.
압입 및 3개 접촉을 이용한 상기 대퇴골 스템의 자동 배치에 있어서, 도 94에 나타낸 바와 같이, 상기 자동 표식자는 상기 대퇴골 및 상기 임플란트 상의 축을 정의하는 것을 포함한다. 상기 대퇴골에 관하여, 상기 인체 대퇴골축(AFA)이 계산되고, 이어서 상기 근위부 인체 축(PAA)이 계산된다. 그리고 나서, 상기 근위부 경부 각도(PNA)가 계산되고, 이는 상기 AFA와 PNA 사이의 각도로서 정의된다. 상기 대퇴골 임플란트에 관하여, 상기 임플란트 축은 상기 임플란트 스템의 길이를 따라 있고 상기 임플란트 경부축은 상기 임플란트 경부의 길이를 따라 있다. 상기 대퇴골의 PNA와 마찬가지로, 상기 임플란트 각도는 상기 임플란트 축과 상기 임플란트 경부축 사이의 각도로서 정의된다. 그리고나서, 상기 임플란트는 상기 PNA에 가장 가까운 임플란트 각도를 갖도록 선택된다. 그리하여, 상기 임플란트 맞춤 각도(IF A)는 상기 선택된 임플란트 각도로 상기 대퇴골두 중심으로부터 이끌어낸 벡터로써 상기 근위부 인체 축의 교차점으로서 정의된다.
압입, 3개 접촉, 및 상기 계산된 인체 표식자를 이용한 상기 대퇴골 스템의 자동 배치를 이용할 때, 도 94에 나타낸 바와 같이, 임플란트 사이징 단계는 골반 및 대퇴골 요소에 대한 적절한 임플란트 크기를 위하여 결정/추정된다. 상기 임플란트 크기는 상기 임플란트 축을 상기 인체 대퇴골축에 정렬하여 상기 임플란트를 상기 대퇴골에 정렬함으로써 선택된다. 그리고나서 상기 임플란트는 그의 경부축을 상기 대퇴경부축에 맞게 조정하여 회전된다. 그리하여, 상기 임플란트는 상기 대퇴골 근위부 내에서 인체에 적합한 위치로 이동된다. 그 후, 상기 시스템은 임플란트 배치 단계로 보내진다.
압입 대퇴골 스템에 대한 임플란트 배치 단계에서, 외과 전문의의 바람직한 수술 기술 및 미리 계산된 인체 표식자에 기초하여, 상기 초기 임플란트 위치는 관련된 모든 임플란트될 요소에 대하여 결정/선택된다. 상기 대퇴골 근위부 골절술을 시뮬레이션하기 위하여 절제 평면이 생성되고 상기 임플란트 맞춤성(fit)이 평가된다. 상기 임플란트 및 대퇴골 골수강의 윤곽을 분석함으로써 맞춤성 평가가 수행된다. 상기 인체 축 및 대퇴경부축의 교차점을 통과하여, 윤곽을 생성하면서, 인체 축 및 대퇴경부축 모두에 대하여 법선인 평면으로 상기 골수강을 교차함으로써 윤곽이 생성된다. 상기 임플란트 및 골수강 윤곽이 생성될 때, 가능한 많은 정확한 임플란트 크기를 달성하도록, 상기 동일한 위치에서 상기 골수강 폭보다 작은 폭을 갖는 임플란트 만을 유지한다. 가능한 크기의 군은 상기 임플란트와 상기 골수강 사이의 평균 제곱 거리 오차를 감소시키는 2가지 전략을 통하여 감소된다. 상기 제 1 전략은 상기 임플란트 및 상기 골수강의 모든 내측과 측방 사이의 거리의 평균 제곱 오차(MSE) 또는 기타 수학적 오차 척도를 최소화한다. 제 2 전략은 상기 임플란트 및 상기 골수강의 측방 사이의 거리 MSE를 최소화한다.
이러한 임플란트 배치 단계의 일부로서, 반복 계산법을 이용하게 되며, 이는 "경험에서 비롯된 추측"의 배치를 평가하기 위하여 운동학적 모의시험의 일부로서 임플란트 배치에 관한 초기 "경험에서 비롯된 추측"을 이용하는 것을 포함한다. 예시적인 형태에서, 추정되었거나 또는 측정된 관절 운동학을 이용함으로써 상기 임플란트(상기 선택된 임플란트의 배치에 기초하여)에 대한 운동학적 모의시험이 관절 가동 범위를 통하여 이루어진다. 따라서, 상기 운동학적 모의시험은 충돌 위치를 결정하고 상기 임플란트 이식 후의 결과적인 관절 가동 범위를 추정하는 데에 이용될 수 있다. 상기 운동학적 모의시험의 결과 데이터가 만족스럽지 못한 경우(예를 들면, 만족스럽지 못한 관절 가동 범위, 자연스러운 운동학의 만족스럽지 못한 흉내, 등)에는, 만족스러운 결과에 이를 때까지 임플란트 배치에 대한 다른 위치를 이용할 수 있고 이에 운동학적인 분석을 취하여 상기 임플란트 배치를 더욱 개선할 수 있다. 관련된 모든 임플란트될 요소에 대하여 임플란트 위치를 결정/선택한 후, 상기 템플릿 데이터는 지그 제작 모듈로 보내진다.
도 87을 참조하면, 상기 지그 제작 모듈은 환자-맞춤형 가이드 모델을 제작한다. 더욱 구체적으로, 상기 템플릿 데이터 및 관련된 계획 파라미터로부터, 상기 환자의 잔여 뼈에 대하여 환자-맞춤형 임플란트의 형상 및 배치가 확인된다. 따라서, 상기 가상 템플레이팅 모듈은, 상기 환자-맞춤형 3D 뼈 모델을 이용하여, 상기 환자의 잔여 뼈에 대하여 임플란트 위치를 계산하고, 그리하여, 상기 환자의 잔여 뼈가 얼마나 많이 보유되어야 하는지에 관한 정보를 상기 지그 제작 모듈에 제공한다. 이러한 뼈 보유 데이터에 일치하게, 상기 지그 제작 모듈은 계획대로 상기 임플란트를 가능하게 하기에 필요가 있는 상기 잔여 뼈에 대하여 환자의 현재 뼈를 제하기 위한 하나 이상의 뼈 절단을 할당하도록 상기 뼈 보유 데이터를 이용한다. 상기 의도된 뼈 절단(들)을 이용하여, 상기 지그 제작 모듈은 단일의 위치 및 방향으로 상기 환자의 뼈에 짝지어지도록 구성된 형상을 갖는 절단 가이드/지그의 가상 3D 모델을 제작한다. 달리 말하자면, 상기 절단 지그의 3D 모델은 상기 환자의 잔여 뼈의 인체 표면의 "네거티브"로서 제작되므로 상기 가시적인 절단 가이드는 정밀하게 상기 환자 인체에 매칭된다. 이러한 방식으로, 상기 절단 지그의 포지셔닝에 관련된 임의의 추측이 제거된다. 상기 지그 제작 모듈이 상기 절단 지그의 가상의 3D 모델을 제작한 후, 상기 모듈은 쾌속 조형기, CNC 공작기계, 또는 가시적인 절단 가이드를 제작하기 위한 유사한 장치에 필요한 기계어를 출력한다. 예를 들어, 상기 대퇴골두 및 경부의 절제를 위한 예시적인 절단 지그는 중공 슬롯으로 이루어지며, 상기 중공 슬롯은 특정 관절 가동 범위 내로 절단 블레이드를 제한하기 위하여 관련 가이드를 형성하고 상기 수술계획 및 템플레이팅 모듈로부터의 상기 가상 절단을 복제하는 소정의의 방향으로 상기 절단 블레이드를 유지한다. 상기 지그 제작 모듈은 또한 상기 대퇴골 스템에 대한 배치 지그를 제작하기 위하여 이용된다.
도 100을 참조하면, 상기 대퇴골두 및 경부의 절제에 이어서, 대퇴골 스템 삽입으로 이어지는 골수내 리밍이 수행된다. 상기 대퇴골 임플란트의 삽입을 위하여 대퇴골을 준비하기 위하여, 상기 골수강의 리밍은 상기 대퇴골 임플란트의 방향에 일치하는 방향을 따라 수행되어야 한다. 상기 리밍이 오프셋되면, 상기 대퇴골 임플란트의 방향은 절충될 수 있다. 이러한 문제를 다루기 위하여, 상기 지그 제작 모듈은 상기 환자의 잔여 또는 절제된 뼈의 인체 표면에 대하여 "네거티브"인 가상 가이드를 제작하여 쾌속 조형기, CNC 공작기계, 또는 유사한 장치로 하여금 상기 환자 인체에 정밀하게 매칭되는 절단 가이드를 제작하도록 할 수 있다. 예를 들어, 상기 리밍 지그는 축방향 가이드를 포함할 수 있고, 상기 축방향 가이드를 따라 상기 리머는 길이방향으로 이동할 수 있다. 이러한 리밍 지그를 이용함으로써, 상기 리밍 작업을 수행하는 외과 전문의에게는 적당한 방향의 리밍이 보장된다.
상기 골수강은 상기 대퇴골 스템을 수용할 수 있다. 거듭, 상기 대퇴골 스템이 상기 골수강 내에서 회전 관점 및 각도 관점 모두에서 적절히 위치됨을 보장하기 위하여, 상기 지그 제작 모듈은 대퇴골 스템 배치 가이드를 제작한다. 예를 들어, 상기 대퇴골 스템 배치 가이드는 상기 환자의 잔여 또는 절제된 뼈의 인체 표면뿐만 아니라 상기 대퇴골 스템의 상부에 대하여 동시에 "네거티브"이다. 이러한 방식으로, 상기 배치 가이드는 상기 대퇴골 축(상기 대퇴골 볼이 연결되는 대퇴골 스템의 부분) 위로 슬라이드하며 동시에 상기 환자의 잔여 또는 절제된 뼈를 갖는 인터페이스에 특유한 형상을 포함하므로 상기 대퇴골 스템의 단일한 방향만이 상기 환자의 대퇴골에 대하여 가능하여, 수술 전의 계획에 일치하게 상기 대퇴골 스템의 적절한 이식을 보장하게 된다. 그러나, 상기 예시적인 지그는 본래의 엉덩이 임플란트에 관련하여 설명되었으나, 당업자는 상기 전술한 바의 예시적인 과정 및 시스템이 본래의 엉덩이 임플란트 또는 엉덩이 임플란트 또는 재수술 절차에 한정되는 것이 아님을 이해해야 한다. 대신에, 상기 과정 및 시스템은 제한 없이, 무릎, 발목, 어깨, 척추, 머리, 및 팔꿈치를 포함하여 인체의 기타 영역에 필요한 수술 절차에 더하여 임의의 엉덩이 임플란트에도 적용가능하다.
도 101에 나타낸 바와 같이, 상기 비구에 있어서, 상기 지그 제작 모듈은 상기 비구컵에 대한 리밍 및 비구 임플란트 배치 가이드를 제작하기 위한 명령어를 생성할 수 있다. 특히, 상기 템플릿 데이터 및 관련 계획 파라미터로부터, 환자-맞춤형 비구 임플란트의 형상 및 배치는 상기 환자의 잔여 골반에 대하여 확인된다. 따라서, 상기 가상 템플레이팅 모듈은, 상기 환자-맞춤형 3D 비구 모델을 이용하여, 상기 환자의 잔여 뼈에 대하여 상기 비구컵 임플란트의 크기 및 위치를 계산하고, 그리하여, 상기 환자의 잔여 골반이 얼마나 많이 보유되어야 하는지 및 소망하는 임플란트 방향에 관한 정보를 상기 지그 제작 모듈에 제공한다. 이러한 뼈 보유 데이터에 일치하게, 상기 지그 제작 모듈은 계획대로 상기 비구 임플란트를 가능하게 하기에 필요가 있는 상기 잔여 뼈에 대하여 환자의 현재 뼈를 제하기 위한 하나 이상의 뼈 절단/리밍을 할당하도록 상기 뼈 보유 데이터를 이용한다. 상기 의도된 뼈 절단(들)을 이용하여, 상기 지그 제작 모듈은 단 하나의 방향을 통하여 상기 환자의 골반 2개 부분에 짝지어지도록 구성된 형상을 갖는 절단 가이드/지그의 가상 3D 모델을 제작한다. 달리 말하자면, 상기 절단 지그의 3D 모델은 상기 환자의 골반의 인체 표면의 "네거티브"로서 제작되므로 상기 가시적인 절단 가이드는 정밀하게 상기 환자 인체에 매칭된다. 이러한 방식으로, 상기 리밍 지그의 포지셔닝에 관련된 임의의 추측이 제거된다. 상기 지그 제작 모듈이 상기 리밍 지그의 가상의 3D 모델을 제작한 후, 상기 모듈은 쾌속 조형기, CNC 공작기계, 또는 가시적인 리밍 지그를 제작하기 위한 유사한 장치에 필요한 기계어를 출력한다. 예를 들어, 비구를 리밍하기 위한 예시적인 비구 요소 지그는 4-편 구조로 이루어지며, 그 중 제 1 편은 원래 비구에 수용되는 구조로 이루어지고, 제 2 편이 상기 제 1 편을 배치 가이드로서 이용하여 상기 골반에 안착될 때까지 상기 제 2 편을 임시로 장착하는 구조로 이루어진다. 상기 제 2 편이 상기 골반에 고정된 후, 상기 제 1 편은 제거될 수 있다. 그 후, 제 3 편은 리머가 상기 제 3 편에 대하여 길이방향으로 이동가능하면서도 그의 방향은 상기 제 1 편 및 제 3 편의 조합을 이용하여 고정되도록 함을 보장하기 위하여 상기 제 2 편에 특유하게 인터페이스 되는 원통형 또는 부분적인 원통형 요소를 포함한다. 리밍에 이어, 상기 리머는 제거되고 상기 제 3 편도 상기 제 1 편으로부터 제거된다. 상기 비구컵 임플란트는 제 4 편을 이용하여 리밍된 비구에 장착된다. 특히, 상기 제 4 편은 단일의 방향으로만 상기 제 1 편에 맞물리도록 특유한 형상으로 되며, 동시에 상기 비구컵 임플란트의 내부로 수용되도록 형성된다. 상기 임플란트 컵이 위치된 후, 상기 제 1 편 및 제 4 편은 모두 제거된다. 상기 비구 임플란트를 장착하기 위하여 상기 골반에 하나 이상의 홀을 천공하도록 추가의 지그가 형성될 수 있으며, 이 때 각각의 드릴 지그는 드릴 비트의 방향을 확인하기 위하여 상기 제 1 편에 이어서 장착됨을 주지해야 한다.
수술용
네비게이션
도 103-111을 참조하면, 수술 과정 중에 수술용 네비게이션으로 하여금 정형외과적 수술용 공구 및 정형외과적 임플란트를 정확하게 위치시키도록 하기 위하여 하나 이상의 관성 측정 장치(IMUs)를 이용하기 위한 대안적인 예시적인 시스템 및 프로세스가 설명된다. 이러한 제 1 대안적인 예시적인 실시예는 전체 고관절 치환술 과정을 수행하는 맥락에서 설명된다. 그럼에도 불구하고, 상기 설명된 방법, 시스템, 및 프로세스는 이하에서 수술용 공구 및 임플란트의 가이던스가 유용한 기타 임의의 수술 과정에도 적용가능하다.
개략적으로 나타낸 바와 같이, 환자 영상(X-선, CT, MRI, 등에 무관하게)을 이용하는 것 및 상기 환자의 인체 및 적절한 임플란트 크기, 형상, 및 배치에 대한 가상 템플릿에 도달하기 위하여 분할 또는 등록을 수행하는 것의 초기 단계는 도 87, 도 88 및 도 90-92를 참조하여 앞서 설명된 것과 유사하다. 다소 상이한 것은 상기 가상 템플레이팅 모듈로부터 다운스트림에 이용된 모듈 및 프로세스이다.
상기 가상 템플레이팅 모듈로부터의 다운스트림은 초기화 모델 제작 모듈이다. 이러한 모듈은 템플릿 데이터 및 관련 계획 파라미터를 수신한다(즉, 환자-맞춤형 비구 임플란트의 형상 및 배치는 상기 환자의 나머지 골반에 대하여 알려진 것이고, 환자-맞춤형 대퇴골 임플란트의 형상 및 배치는 상기 환자의 나머지 대퇴골에 대하여 알려진 것이다). 이러한 환자-맞춤형 정보를 이용하여, 상기 초기화 모델 제작 모듈은 상기 환자의 고유 비구컵에 대한 초기화 장치의 3D 가상 모델 및 상기 대퇴골 임플란트에 대한 초기화 장치의 3D 가상 모델을 제작한다. 달리 말하자면, 상기 비구 초기화 장치의 3D 모델은 상기 환자의 관골구의 해부학적 표면에 대한 "네거티브"로서 제작되므로, 상기 탠저블 초기화 장치는 상기 환자의 관골구에 정밀하게 매칭된다. 마찬가지로, 상기 대퇴골 스템 초기화 장치의 3D 모델은 상기 환자의 나머지 대퇴골 및 대퇴골 임플란트의 해부학적 표면에 대한 "네거티브"로 제작되므로, 상기 탠저블 초기화 장치는 단일의 위치 및 단일의 방향에서만 상기 환자의 나머지 대퇴골 및 대퇴골 임플란트에 정밀하게 매칭된다. 더욱이, 이들 초기화 장치를 제작하기 위하여, 상기 초기화 모델 제작 모듈은 또한 상기 탠저블 비구 초기화 장치 및 대퇴골 초기화 장치를 제작하기 위하여 쾌속 조형기, CNC 기계, 또는 유사한 장치에 필요한 기계어를 발생한다. 상기 탠저블 비구 초기화 장치 및 대퇴골 초기화 장치는 적어도 하나의 IMU(1002)를 갖도록 구성된 수술용 네비게이션 도구에 제작 및 장착되거나(또는 동시에 형성되거나 또는 일체로 형성됨) 또는 이에 일체로 된다.
방향 및 이동 데이터를 보고할 수 있는 IMU(1002)는, 수술용 네비게이션을 보조하는 수술용 공구에 결합되며(예를 들어, 이에 장착됨), 이는 수술용 장비 및 임플란트 장치를 위치시키는 것을 포함한다. 이들 IMU(1002)는, 상기 소프트웨어로 하여금 상기 IMU의 현재 위치 및 방향을 계산할 수 있도록 하는 상대 속도 및 시간을 나타내는 상기 IMU로부터의 출력 데이터를 수신하는 소프트웨어 시스템에 통신 결합되거나(유선 또는 무선), 또는 상기 IMU(1002)는 아래에 더욱 상세히 설명되는 상기 수술기구의 위치 및 방향을 계산하고 전송하며, 상기 수술기구의 위치 및 방향은 상기 IMU에 관련된다. 이러한 예시적인 설명에서, 각각의 IMU(1002)는, 서로 수직인 3개의 방향(예를 들어, X, Y, Z 방향)에 대한 데이터를 출력하기 위하여 단일의 회로기판에 집적될 수 있거나 또는 하나 이상의 센서(예를 들면, 자이로스코프, 가속도계, 자력계)의 개별 기판으로 구성될 수 있는, 3개의 자이로스코프, 3개의 가속도계, 및 3개의 홀-효과 자력계를 포함한다(3 세트의 3-축 자이로스코프, 가속도계, 자력계). 이러한 방식으로, 각각의 IMU(1002)는 상기 3개의 자이로스코프, 3개의 가속도계, 및 3개의 홀-효과 자력계로부터 21 전압 또는 수 출력을 발생하도록 작동된다. 예시적인 형태에서, 각각의 IMU(1002)는, 3개의 가속도계, 3개의 자이로스코프 센서 및 3개의 자력계(LSM9DS, ST-마이크로일렉트로닉스)로 구성되는 집적 센싱 모듈 및 3개의 가속도계, 및 3개의 자력계(LSM303, ST-마이크로일렉트로닉스)로 구성되는 2개의 집적 센싱 모듈을 포함하는 센서 기판이 제공된, 센서 기판 및 프로세싱 기판을 포함한다. 특히, 상기 IMU(1002) 각각은 적어도 3개의 축: 피치(상 및 하), 요(좌측 및 우측) 및 롤(시계방향 또는 반-시계방향 회전)에 대하여 공간 내에서 회전 변화를 측정하는 각운동량 센서를 포함한다. 더욱 구체적으로, 자력계로 구성되는 각각의 집적 센싱 모듈은, 상기 인가된 자기장에 비례하는 전압을 출력하기 위하여 할당된 각각의 자력계와 함께, 상기 회로기판 상에서 상이한 위치에 위치되고, 또한, 3차원적 좌표계 내에서 상기 3개 방향 각각에 대하여 공간 내 포인트에서 자기장의 극성 방향을 감지한다. 예를 들어, 상기 제 1 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 1 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력하며, 상기 제 2 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 2 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력하고, 상기 제 3 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 3 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력한다. 이들 3 세트의 자력계를 이용함으로써, 국소 자기장 파동의 검출에 더하여 상기 IMU의 헤딩 방향을 결정할 수 있다. 각각의 자력계는 상기 자기장을 참조로서 이용하며 자북으로부터의 방향 편차를 결정한다. 그러나, 상기 국소 자기장 철계 또는 자성 물질에 의하여 왜곡될 수 있고, 이는 통상 하드 아이언(hard iron) 왜곡 및 연철 왜곡으로 칭한다. 연철 왜곡 예로는 탄소강, 스테인리스강, 등과 같이 낮은 투자율을 갖는 물질이 있다. 하드 아이언 왜곡은 영구 자석에 의하여 유발된다. 이들 왜곡은 비-획일적인 장을 발생시키고(도 184 참조), 이는 상기 자력계 출력을 처리하고 상기 헤딩 방향을 해결하는 데에 이용되는 알고리즘의 정확도에 영향을 미친다. 결과적으로, 아래에서 더욱 상세히 논의되는 바와 같이, 캘리브레이션 알고리즘은 상기 검출된 자기장에서 균일성을 회복하도록 상기 자력계를 캘리브레이션하기 위하여 이용된다. 각각의 IMU(1002)는, 제한 없이, CR2032 코인셀 배터리 및 200mAh 충전가능한 리튬 이온 배터리와 같은, 교체가능한 또는 충전가능한 에너지 저장장치에 의하여 전원공급될 수 있다.
IMU(1002) 내의 집적 센싱 모듈은 설정가능한 신호 조정 회로 및 상기 센서에 대한 숫자 출력을 생성할 수 있는 AD 변환기(ADC)를 포함할 수 있다. 상기 IMU(1002)는 전압 출력으로 센서를 이용할 수 있고, 외부 신호 조정 회로는 멀티채널 24 비트 아날로그-디지털 변환기(ADC)(ADS 1258, Texas instrument)의 입력 범위로 센서 출력을 조정하도록 구성된 오프셋 증폭기로 될 수 있다. 상기 IMU(1002)는 마이크로컨트롤러 및 무선 송신 모듈(CC2541, Texas instrument)을 포함하는 집적 프로세싱 모듈을 더욱 포함한다. 양자택일적으로, 상기 IMU(1002)는 별도의 저출력 마이크로컨트롤러(MSP430F2274, Texas instrument)를 프로세서로서 이용할 수 있고 통신을 위하여 콤팩트 무선 송신 모듈(A2500R24A, Anaren)을 이용할 수 있다. 상기 프로세서는 각각의 IMU(1002)의 일부로서 집적될 수 있고 또는 각각의 IMU로부터 별개로 될 수 있으나 이에 통신 결합된다. 이러한 프로세서 블루투스 호환성으로 될 수 있고, 상기 자이로스코프, 가속도계, 및 자력계에 대한 유선 또는 무선 통신뿐만 아니라, 상기 프로세서와 신호 수신기 사이의 유선 또는 무선 통신을 도울 수 있다.
각각의 IMU(1002)는 신호 수신기에 통신 결합되며, 상기 신호 수신기는 다수의 IMU로부터 수신된 데이터를 처리하기 위하여 미리-결정된 장치 식별 번호를 이용한다. 상기 데이터 비율은 단일의 IMU에 대하여 대략 100 Hz이고 IMU가 상기 공유 네트워크에 더 많이 연결될수록 감소된다. 상기 신호 수신기의 소프트웨어는 실시간으로 상기 IMU(1002)로부터의 신호를 수신하고, 상기 수신된 IMU 데이터에 기초하여 상기 IMU의 현재 위치를 연속적으로 계산한다. 구체적으로, 상기 IMU로부터의 가속도 측정 출력은 상기 3개의 축 각각에서 상기 IMU의 현재 속도를 측정하기 위하여 시간에 대하여 통합된다. 상기 각각의 축에 대하여 계산된 속도는 상기 현재 위치를 계산하기 위하여 시간에 대하여 통합된다. 그러나, 유용한 위치 데이터를 구하기 위하여, 참조 프레임이 설정되어야 하며, 이는 각각의 IMU을 캘리브레이션하는 것을 포함한다.
본 개시는 수술용 네비게이션에서 사용하기 위한 하나 이상의 IMU를 캘리브레이션하기 위한 신규한 시스템 및 방법을 포함한다. 수술용 네비게이션에서 요지의 보조기구로서 IMU의 이용을 참조한 종전의 환자들은 여러 가지 이유로 수술 불가능함 때문에 고통을 겪었다. 이러한 이유들 중에는 금속 수술기구에 대한 IMU의 배치뿐만 아니라 상기 IMU의 캘리브레이션 부재가 포함된다. 더욱 구체적으로, 자력계를 내장한 IMU에 있어서, 상기 자력계의 국소적 캘리브레이션은 수술기구 및 관련 정형외과적 요소의 작동 추적에 필수적이다.
도 180를 참조하면, 본 개시 내용에 따라, 신규한 캘리브레이션 도구(1000)는 자력계를 내장할 수도 있는 하나 이상의 IMU(1002)를 캘리브레이션하기 위하여 이용된다. 예시적인 형태에서, 상기 캘리브레이션 도구(1000)는 고정적인 베이스(1006)를 포함하며, 그의 내부에는 제어기(1008), 모터(1012), 기어전동장치(1016), 구동축(1020), 및 전원(1024)이 수용된다. 상기 구동축(1020)은, 상기 모터(1012)와 같이, 상기 기어전동장치(1016)의 일부에 장착되어, 상기 모터는 상기 기어전동장치를 구동하고 상기 구동축을 회전시키도록 작동된다. 특히, 상기 모터(1012)는 상기 기어전동장치(1016)의 구동기어가 장착되는 단일의 구동축을 갖는 전동기로 이루어진다. 이러한 구동기어는 상기 구동축(1020)에 장착되는 제 2 기어와 맞물려서, 상기 모터(1012)의 회전 운동을 상기 구동축(1020)의 회전 운동으로 전환한다.
이러한 예시적인 구성에서, 상기 고정적인 베이스(1006)는 상기 모터(1012), 상기 기어전동장치(1016), 상기 제어기(1008), 상기 전원(1024), 및 상기 구동축(1020)의 일부를 수용하는 중공의 내부를 부분적으로 구획하는 원형의 외부를 포함한다. 예를 들어, 중심 수직축은 상기 구동축(1020)의 중앙축에 동축인 상기 고정적인 베이스(1006)를 통하여 연장된다. 이러한 동축 정렬은 상기 고정적인 베이스(1006)에 대한 상기 구동축(1020)의 회전 결과로 발생되는 진동을 감소시킨다. 상기 구동축(1020)의 회전은 상기 고정적인 베이스(1006)에 대하여 외부 스테이지(1030)을 회전시키도록 작동된다.
예시적인 형태에서, 링-형상 베어링 판(1034)은 상기 고정적인 베이스(1006)의 상부와 상기 외부 스테이지(1030)의 하부 사이에 개재된다. 상기 고정적인 베이스(1006) 및 상기 베어링 판(1034)는 모두 상응하는 축방향 개구부를 가지며, 상기 구동축(1020)의 일부가 배치될 수 있도록 한다. 상기 외부 스테이지(1030)에 근접한 상기 구동축(1020)의 일단부는 슬립링(1038)에 장착되며, 이는 이어서 상기 외부 스테이지에 장착된다. 이러한 방식으로, 상기 고정적인 베이스(1006)에 대한 상기 구동축(1020)의 회전은 상기 외부 스테이지(1030)로 하여금 상기 중심 수직축 주위로 회전하도록 유발한다. 이하에서 보다 상세히 설명되는 바와 같이, 상기 IMU(1002)는 상기 중심 수직축 주위로 상기 IMU를 회전시킴으로써 부분적으로 캘리브레이션된다.
이러한 예시적인 실시예에서, 상기 외부 스테이지(1030)는 상응하는 대향 포크 부속물(1042)을 갖는 블록 U-형상의 프로파일을 포함한다. 각각의 부속물(1042)은 롤러 베어링 어셈블리(1046)에 장착되고 이는 중앙축(1050)을 수용하며 이에 피벗 장착된다. 각각의 중앙축(1050)은 상기 포크 부속물(1042) 사이에 놓이는 내부 플랫폼(1054)의 대향 외측 측부에 동시에 장착된다. 상기 내부 플랫폼(1054)은 상기 상응하는 대향 포크 부속물(1042) 내에 끼워맞춤되는 블록 U-형상의 프로파일을 포함하며, 다수의 직립 돌출부(1058)를 갖는 베이스를 포함한다. 이하에서 보다 상세히 설명되는 바와 같이, 상기 직립 돌출부(1058)는 상기 캘리브레이션 도구(1000)의 일부에 대하여 상기 IMU의 위치를 고정하기 위하여 각각의 IMU(1002)에 관련된 해당 홈에 각각 맞물리도록 구성된다. 각각의 중앙축(1050)은 중심축을 따라 길이방향으로 정렬되며 상기 내부 플랫폼(1054)에 장착되므로, 상기 중앙축의 회전은 상기 외부 스테이지(1030)에 대한 상기 내부 플랫폼(1054)의 회전에 상응하게 된다.
상기 외부 스테이지(1030)에 대하여 상기 내부 플랫폼(1054)를 회전시키기 위하여, 상기 캘리브레이션 도구는 상기 중앙축(1050) 중 하나에 장착되는 풀리(1060)를 포함한다. 특히, 상기 중앙축(1050) 중 하나는 상기 풀리(1060)의 장착 및 구동 벨트(1064)에 의한 상기 풀리의 상응하는 회전을 수용하고 동시에 전동기(1068)에 맞물리도록 나머지 하나보다 길다. 이러한 예시적인 실시예에서, 상기 전동기(1068)의 출력축은 그 자신의 풀리(1072)의 장착되고, 상기 전동기에 전원이 공급될 때, 궁극적으로 상기 풀리(1060)를 회전시키기 위하여 상기 구동 벨트(1064)에 맞물리고 상기 외부 스테이지(1030)에 대하여 상기 내부 플랫폼(1054)을 상응하게 회전시킨다 (상기 중앙축(1050)의 길이방향으로 정렬된 중심축에 대하여). 상기 전동기(1068)는 is mounted to 상기 포크 부속물(1042) 중 하나의 아래에서 상기 외부 스테이지(1030)의 아래쪽으로부터 연장되는 모터 마운트(1076)에 장착된다. 이하에서 보다 상세히 설명되는 바와 같이, 상기 IMU(1002)는 상기 외부 스테이지(1030)에 대하여 상기 내부 플랫폼(1054)을 회전시킴으로써 부분적으로 캘리브레이션되고, 그리하여 상기 중심 수직축에 대하여 수직인 상기 길이방향 중심축에 대하여 상기 IMU를 회전시킨다. 당업자는 제 3 회전축이 상기 길이방향 중심축 및 상기 길이방향 수직축 모두에 대하여 수직인 축에 대하여 상기 IMU가 회전되도록 유발할 수 있음을 이해해야 한다. 상기 캘리브레이션 도구(1000)를 이용하여 하나 이상의 IMU(1002)를 캘리브레이션하기 위한 예시적인 캘리브레이션 순서는 이하에서 설명된다.
예시적인 형태에서, 상기 IMU(1002)는 수술용 네비게이션에서 궁극적인 사용 위치에 가깝게 근접하도록 바람직하게 캘리브레이션된다. 이는 수술실 내에서 가능하며, 더욱 구체적으로, 상기 환자가 눕게 되거나 누워있는 환자 침상 근처에서 가능하다. 상기 IMU의 캘리브레이션은 위치 특이적이어서, 사용 목적 위치로부터 더욱 멀리에 있는 상기 IMU의 캘리브레이션은 캘리브레이션의 위치 및 상기 사용 영역(즉, 상기 수술 영역)에서 자기장에 중요한 변화를 초래할 수 있다. 결과적으로, 사용 영역 근처에서 상기 IMU(1002)를 캘리브레이션하는 것이 바람직하다.
상기 신규한 캘리브레이션 도구(1000)를 이용함으로써, 각각의 IMU(1002)는 상기 내부 플랫폼(1054)의 직립 돌출부(1058) 중 하나에 장착된다. 예를 들어, 각각의 IMU(1002)는 하부가 개방되게 묘사된 형상의 둘레부를 갖는 하우징에 장착된다. 상기 IMU(1002) 하우징의 상기 형상의 둘레부는 상기 직립 돌출부(1058)의 둘레 윤곽대로 구성되므로, 캘리브레이션 순서 중에 상기 IMU 하우징 및 상기 내부 플랫폼(1054)의 맞물림을 유지하기 위하여 상기 IMU 하우징은 상응하는 직립 돌출부 위로 스냅-핏될 수 있다. 예를 들어, 상기 IMU 하우징은 장타원형, 삼각형, 사각형, 또는 상응하는 직립 돌출부(1058)와 맞물림되는 기타 측부 둘레부를 가질 수 있다. 예시적인 설명 및 도시의 방편으로, 상기 IMU 하우징은 일정한 수직 단면에 의하여 묘사되는 사각형 개구부를 가지며, 이는 상기 직립 돌출부(1058)의 사각형 단면보다 다소 크다. 예시적인 형태에서, 상기 캘리브레이션 도구(1000)는 4개의 IMU(1002)에 대한 캘리브레이션을 동시에 가능하게 하기 위하여 4개의 직립 돌출부(1058)를 포함한다. 그러나, 동시에 하나 이상의 IMU에 대한 캘리브레이션을 제공하기 위하여 상기 내부 플랫폼(1054)의 일부로서 대략 4개 정도의 직립 돌출부(1058)가 포함될 수 있음을 주의해야 한다.
상기 캘리브레이션 순서의 목적은 상기 가속도계에 대하여 제로를 설정하고 (즉, 정지 위치에 있음을 의미, 상기 가속도계는 제로 가속도와 일치하는 데이터를 제공한다), 상기 국소 자기장을 맵핑하고, 상기 검출된 자기장의 방향 변화 및 왜곡량을 확인하기 위하여 상기 자력계의 출력을 정상화하는 것이다. 상기 IMU(1002)의 가속도계를 캘리브레이션하기 위하여, 상기 내부 플랫폼(1054)은 상기 외부 스테이지(1030)에 대하여 고정적인 상태로 남게 되고, 또한 상기 고정적인 베이스(1006)에 대하여 고정적인 상태로 남는다. 상기 외부 스테이지(1030)에 대한 제 1의 고정된 정지 위치에서 상기 내부 플랫폼(1054)으로써 모든 가속도계로부터 다수의 판독을 취한다. 그 후, 상기 내부 스테이지는 상기 외부 스테이지(1030)에 대하여 제 2의 고정된 정지 위치로 이동되고, 모든 가속도계로부터 제 2 세트의 다수의 판독을 취한다. 상기 다수의 고정 위치에서 상기 가속도계로부터의 출력은 가속도계 특이성 기반으로 기록되고, 적용가능한 가속도계에 대하여 제로 가속도를 설정하는 데에 이용된다. 더욱이, 상기 가속도계에 대한 제로 설정에 있어서, 상기 캘리브레이션 순서는 또한 상기 국소 자기장을 맵핑하고, 상기 검출된 자기장의 방향 변화 및 왜곡량을 확인하기 위하여 상기 자력계의 출력을 정상화한다.
각각의 자력계에 대하여 상기 국소 자기장을 맵핑하기 위하여 (상이한 위치에 위치된 각각의 IMU(1002)에 대한 다수의 자력계로 가정), 상기 구동축(1020)에 대하여 그리고 상기 고정적인 베이스(1006)에 관한 상기 중심 수직축에 대하여 회전되는 상기 외부 스테이지(1030)에 더하여, 상기 내부 플랫폼(1054)은 상기 중앙축(1050)에 대하여 그리고 상기 외부 스테이지(1030)에 관한 중심축에 대하여 회전된다. 각각의 자력계로부터의 출력 데이터는 상기 내부 플랫폼(1054)이 서로에 대하여 수직인 2개의 축에 대하여 회전하는 동안 기록된다. 상기 2개의 수직축에 대하여 상기 각각의 자력계를 재위치시키는 것은 각각의 자력계에 의하여 감지된 상기 3차원적 국소 자기장의 포인트 클라우드 또는 맵을 발생시킨다. 도_(캘리브레이션 도 1-3)는 2개의 축에 동시에 회전되는 동안 자력계로부터 수신된 데이터에 기초한 등각뷰, 정면도, 및 상면도로부터 매핑된 예시적인 국소 자기장을 나타낸다. 상기 국소 자기장 맵에 반영된 바와 같이, 상기 국소적 맵은 타원체를 구체화한다. 이러한 타원체 형상은, 통상 하드 아이언 왜곡 및 연철 왜곡으로서 호칭되는, 철계 또는 자성 물질의 존재 하에 발생되는 국소 자기장에서의 왜곡의 결과이다. 연철 왜곡의 예로는 낮은 투자율을 갖는, 탄소강, 스테인리스강 등과 같은 물질이 있고, 하드 아이언 왜곡은 영구자석과 같은 물질에 의하여 유발된다.
상기 국소 자기장에서의 왜곡을 제외하고는, 상기 국소 자기장 맵은 구형으로 된다고 가정한다. 결과적으로, 상기 캘리브레이션 순서는 상기 캘리브레이션 도구(1000) 또는 상기 IMU의 수동 조작에 의하여 상이한 방향에서 상기 국소 자기장을 나타내기에 충분한 데이터 포인트를 수집하도록 작동된다. 캘리브레이션 알고리즘은 상기 왜곡된 타원형 국소 자기장을 획일적인 구형 장으로 맵핑하기 위하여 보정 계수를 계산한다.
도 184를 참조하면, IMU(1002)의 일부로서 서로에 대하여 상이한 위치에 위치된 상기 다수의 자력계는 상기 캘리브레이션이 종료된 후에 국소적 자기를 검출하는 데에 이용된다. 상기 자기장에 왜곡이 없을 경우, 각각의 상기 자력계는 정확히 동일한 방향, 예를 들면, 극성 북을 나타내는 데이터를 제공해야 한다. 그러나, 철계 또는 자성 물질(예를 들어 수술기구)의 존재와 같이, 상기 국소 자기장의 왜곡은 상기 자력계로 하여금 극성 북의 방향에 대하여 상이한 데이터를 유발한다. 달리 말하자면, 상기 자력계로부터의 출력이 균일하게 극성 북을 반영하지 않는 경우에는, 왜곡이 발생되고 상기 IMU(1002)는 상기 추적 알고리즘이 상기 자력계 데이터를 이용하는 것을 일시적으로 불능화할 수 있다. 이는 사용자에게 왜곡이 검출되었음을 경고한다.
도 185 및 도 186을 참조하면, IMU(1002)를 수용하는 예시적인 수술용 공구는 각각의 기구 특유의 전기적 스위치 패턴 또는 그리드를 포함한다. 더욱 구체적으로, 각각의 수술용 공구 하나 이상의 원통형 캐비티를 제외하고는 대개 평면적인 상부 표면을 갖는 돌출부를 포함한다. 예시적인 형태에서, 각각의 IMU(1002)는 상기 수술용 공구 돌출부를 수용하는 구조로 된 바닥 개구부를 구획하는 하우징을 포함한다. 이러한 바닥 개구부 내에는 바이어스된 원통형 버튼을 각각 포함하는 4개의 스위치가 있으므로, 상기 버튼이 눌려질 때, 상기 스위치는 닫히고 상기 IMU(1002) 프로세서에 해당 신호를 전송한다. 반대로, 상기 버튼이 눌러지지 않을 때에는, 상기 스위치가 개방된 상태로 남게 되고 스위치 폐쇄 해당 신호가 상기 IMU(1002) 프로세서에 전송되지 않는다. 이러한 방식으로, 상기 프로세서는 스위치가 개방됨 및 스위치가 폐쇄됨을 결정하고, 상기 IMU(1002)의 장착된 수술용 공구를 식별하는 데에 이러한 정보를 이용한다.
상기 수술용 공구 식별의 일부로서, 0개 내지 4개의 상기 스위치가 상기 돌출부의 상부 표면에 따라 눌려질 수 있다. 그래픽으로 나타낸 바와 같이, 수술용 공구의 돌출부는 상기 IMU(1002) 하우징의 바닥 개구부 내에 수용되므로, 상기 돌출부의 상부 표면은 상기 스위치에 인접하여 눌려진다. 주의해야 한다 상기 IMU(1002) 하우징 내 상기 돌출부 및 바닥 개구부는 상기 돌출부가 단일의 회전 방향으로만 상기 바닥 개구부 내에 수용되도록 구성되므로, 상기 돌출부와 스위치 사이의 오정렬 가능성을 제한하게 되고, 그렇지 않으면 이는 상기 수술용 공구의 오인을 초래할 수 있다.
특히, 도 185에 나타낸 바와 같이, 상기 캘리브레이션 어댑터 수술용 공구는 독특한 구조를 제공하기 위하여, 상기 돌출부의 전방 우측 코너 (불필요 부품이 제거된 코너 반대쪽) 근처에 위치된 단일의 원통형 캐비티를 포함한다. 따라서, 상기 캘리브레이션 어댑터 수술용 공구의 돌출부가 상기 IMU(1002) 하우징의 바닥 개구부 내에 수용될 때, 상기 2&2 그리드 스위치 중 단일의 스위치만이 상기 IMU(1002) 하우징의 전방 우측 코너에 가장 가까이에서 가동되고, 이는 상기 IMU(1002)가 상기 캘리브레이션 어댑터 수술용 공구에 장착됨을 상기 IMU(1002) 프로세서에 전하게 된다. 반대로, 제 2의 독특한 구조에서, 상기 환자 인체 맵핑(PAM) 등록 도구 어댑터 수술용 공구는 상기 돌출부의 우측 전방 및 후방 코너 부근에 위치된 2개의 원통형 캐비티를 포함한다. 따라서, 상기 PAM 어댑터 수술용 공구의 돌출부가 상기 IMU(1002) 하우징의 바닥 개구부 내에 수용될 때, 상기 2&2 그리드 스위치 중 2개의 스위치만이 상기 IMU(1002) 하우징의 우측에 가장 가까이에서 가동되고, 이는 상기 IMU(1002)가 상기 PAM 어댑터 수술용 공구에 장착됨을 상기 IMU(1002) 프로세서에 전하게 된다. 또한, 상기 리머 어댑터 수술용 공구는 상기 돌출부의 전방 근처에(즉, 상기 전방 좌측 및 우측 코너에 인접) 위치된 2개의 원통형 캐비티를 포함한다. 따라서, 상기 리머 어댑터 수술용 공구의 돌출부가 상기 IMU(1002) 하우징의 바닥 개구부 내에 수용될 때, 상기 2&2 그리드 스위치 중 2개의 스위치만이 상기 IMU(1002) 하우징의 정면에 가장 가까이에서 가동되고, 이는 상기 IMU(1002)가 상기 리머 어댑터 수술용 공구에 장착됨을 상기 IMU(1002) 프로세서에 전하게 된다. 마지막으로, 상기 임팩터 어댑터 수술용 공구는 상기 돌출부의 전방 및 우측 측부 근처에(즉, 전방 좌측 및 우측 코너 및 후방 우측 코너에 인접) 위치된 3개의 원통형 캐비티를 포함한다. 따라서, 상기 임팩터 어댑터 수술용 공구의 돌출부가 상기 IMU(1002) 하우징의 바닥 개구부 내에 수용될 때, 상기 2&2 그리드 스위치 중 3개의 스위치만이 상기 IMU(1002) 하우징의 전방 및 우측 측부에 가장 가까이에서 가동되고, 이는 상기 IMU(1002)가 상기 임팩터 어댑터 수술용 공구에 장착됨을 상기 IMU(1002) 프로세서에 전하게 된다. 당업자는, 상기 IMU(1002)가 장착되는 상기 수술용 공구를 분명하게 식별하기 위하여, 다수의 돌출부, 캐비티, 또는 상기 수술용 공구에 관련된 전기적 접촉과 인터페이스되는 다수의 스위치 또는 전기적 접촉을 상기 IMU(1002)의 일부분으로서 제공함으로써 변형이 이루어질 수 있음은 당업자에게 이해될 것이다.
상기 IMU(1002)가 장착된 상기 수술용 공구의 식별은 정확한 수술용 네비게이션에 있어 중요하다. 특히, 본 개시 내용에 따른 상기 수술용 네비게이션 시스템은 상기 IMU(1002)가 장착되었을 수도 있는 각각의 수술용 공구의 CAD 모델 또는 표면 모델이 미리 설치된 소프트웨어 패키지를 포함한다. 그렇게 함으로써, 상기 소프트웨어 패키지는, 제한 없이, X-방향 길이, Y-방향 폭, 및 Z-방향 높이와 같은, 각각의 수술용 공구의 상대적인 치수를 알게 되고 상기 수술용 공구의 길이, 폭, 및 높이를 따라 이들 치수가 어떻게 변화되는지를 알게 된다. 따라서, 상기 IMU(1002)가 알려진 위치로 상기 수술용 공구에 장착될 때, 상기 IMU(1002)로부터의 상기 위치 및 방향 정보(상기 자이로스코프, 가속도계, 및 자력계에 의하여)는 상기 수술용 공구에 대한 위치 및 방향 정보로 변환될 수 있다. 그러므로, 3D 공간에서 상기 IMU(1002)를 추적함으로써, 상기 소프트웨어 패키지는 상기 IMU(1002)가 장착된 상기 수술용 공구를 3D 공간에서 추적할 수 있고 이러한 위치 및 방향을 외과의 또는 외과의 조수와 같은 사용자에게 전달할 수 있다.
예시적인 형태에서, 상기 소프트웨어 패키지는 각각의 수술용 공구를 3D 모델로서 디스플레이하도록 작동하는 시각적 디스플레이를 포함한다. IMU(1002)가 수술용 공구에 장착될 때, 상기 IMU(1002) 프로세서는 데이터를 상기 소프트웨어 패키지에 보내고, 이는 상기 소프트웨어 패키지로 하여금 상기 IMU(1002)가 장착된 수술용 공구를 식별할 수 있게 한다. 이러한 식별이 이루어진 후, 상기 소프트웨어 패키지는 상기 IMU(1002)가 장착된 상기 수술용 공구의 3D 모델을 상기 IMU로부터 추출된 방향 정보와 일치하는 방향으로 디스플레이한다. 상기 수술용 공구의 3D 모델을 실시간으로 조작함으로써 방향 정보를 제공함에 더하여, 상기 소프트웨어 패키지는 또한 참조 객체(즉, 환자의 뼈)에 장착된 제 2의 참조 IMU(1002)를 이용함으로써 상기 수술용 공구의 위치에 대한 실시간 데이터를 제공한다. 상기 소프트웨어 패키지가 중요한 위치 정보를 제공할 수 있게 되기 이전에, 상기 IMU(1002)(수술용 공구에 장착된 IMU#1 및 참조 객체(즉, 뼈)에 장착된 IMU#2)는 서로에 대하여 등록될 필요가 있다.
예시적인 형태에서, 전체 고관절 치환술 과정의 맥락에서, 도 103-110에 나타낸 바와 같이, 등록 도구는 소정의 방향으로 상기 환자의 인체를 결합하여 상기 템플릿 수술 계획을 재현하는 데에 이용된다. 각각의 유틸리티 IMU(1002)가 그의 등록 도구(상기 대퇴골에 대하여 하나, 상기 골반에 대하여 두 번째 것)에 장착될 때, 상기 등록 도구는 소정의 방향(상기 환자 인체를 상기 IMU "제로"에 정밀하게 매칭하는 단 하나의 방향)으로 해당 뼈에 장착된다. 이러한 등록을 수행하기 위하여, 제 2 참조 IMU는 당해 뼈에 단단히 장착된다(하나의 IMU는 골반에 장착되고, 제 2 IMU는 상기 대퇴골에 장착된다). 달리 말하자면, 하나의 유틸리티 IMU는 상기 비구 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 골반에 단단히 장착된다. 상기 대퇴골의 맥락에서, 하나의 유틸리티 IMU는 상기 대퇴골 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 대퇴골에 단단히 장착된다. 상기 등록 프로세스의 일부로서, 상기 컴퓨터의 소프트웨어는, 상기 등록 도구가 최종적으로 고정되고 그의 고유한 위치 및 방향으로 위치될 때, 상기 유틸리티 IMU의 "제로? 위치를 계산하기 위하여 두 IMU(유틸리티 및 참조)로부터의 출력을 이용한다. 그 후, 상기 IMU(1002)는, 상기 수술용 공구의 적절한 방향 및 배치를 보장하기 위하여, 상기 해당 등록 도구로부터 이동되어 수술용 공구(리머, 톱, 임플란트 배치 가이드, 등)에 소정의 방식으로 장착될 수 있다. 상기 IMU(1002)는 상기 수술 과정이 종료될 때까지 연속적으로 각각의 수술용 공구에 장착되고 그로부터 이동될 수 있다.
이러한 예시적인 실시예에서, 상기 비구 등록 도구는 단일의 방향(회전 위치 및 각도 위치 포함)으로만 상기 환자의 비구컵 내에 맞추어지도록 고유의 돌출부 형상을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위한 IMU(1002) 등록 홀스터(holster)를 포함하므로, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 고유 돌출부에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 골반에 단단히 고정된다. 상기 등록 도구의 고유의 돌출부가 상기 환자의 비구컵 내에서 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 골반에 장착된 상기 IMU(1002)가 가동될 때), 상기 계획된 임플란트 컵 방향(상기 고유의 돌출부가 단일의 정확한 방향으로만 상기 비구컵 내에 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 정확한 위치에 있음을 지시하고 상기 소프트웨어는 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 IMU(1002)는 상기 IMU(1002)를 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 비구 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 비구 등록 도구에 장착된)는 리밍 방향에 대하여 알려진 방향으로 컵 리머에 단단히 고정되어, 상기 골반에 대한 상기 컵 리머의 방향이 알려지게 되고, 두 IMU(상기 컵 리머에 장착된 IMU(1002) 및 골반에 장착된 IMU(1002))를 통하여 동적으로 업데이트된다.
상기 소프트웨어 프로그램은 상기 환자 골반의 가상 모델 및 당해 수술용 공구, 이 경우, 컵 리머의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 골반의 가상 모델, 및 상기 컵 리머 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 특정 컵 리머 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 골반 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 리머가 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 리머를 정확히 배향하기 위하여 상기 리머를 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 상기 컵 리머를 이용한 리서피싱이 완료된 후, 상기 IMU(1002)는 상기 컵 리머로부터 제거되어 상기 삽입기 방향에 대하여 알려진 방향으로 컵 삽입기에 단단히 고정된다. 그 후 상기 컵 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 컵 임플란트를 배치하기 위하여 이용되며, 상기 가속 피드백은 상기 컵 삽입기에 대한 상기 골반의 위치에 관련하여 실시간 피드백을 제공하기 위한 위치를 계산하기 위하여 상기 소프트웨어에 의하여 이용된다. 컵을 위치시키는 것의 이전 또는 이후에 상기 골반에 드릴링에 의하여 홀을 형성하기까지, 상기 등록 도구에 미리 장착된 상기 IMU(1002)는 상기 골반에 대하여 상기 드릴의 정확한 방향으로 보장하기 위하여 수술용 드릴에 단단히 고정될 수 있다. 상기 대퇴골 스템 요소의 배치를 돕기 위하여 상기 소프트웨어 시스템과 함께 유사한 IMU 등록 도구 및 세트를 이용할 수도 있다.
예시적인 실시예에서, 상기 대퇴골 등록 도구는 단일의 방향으로만(회전 위치 및 각도 위치를 포함) 상기 환자의 대퇴경부 위로 부분적으로 맞추어지는 형상으로 된 말단을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위하여 IMU(1002) 등록 홀스터를 포함하여, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 말단 형태에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 대퇴골에 단단히 고정된다. 상기 등록 도구의 말단 형태가 상기 대퇴경부에 대하여 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 대퇴골에 장착된 상기 IMU(1002)가 가동될 때), 상기 대퇴골 방향(상기 말단 형태가 단일의 정확한 방향으로만 상기 대퇴경부 위로 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 상기 정확한 위치에 있음을 지시하고 상기 소프트웨어는 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 IMU(1002)는 상기 IMU(1002)를 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 대퇴골 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 또 다른 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 대퇴골 등록 도구에 장착된)는 알려진 위치로 수술용 톱에 단단히 고정되어, 상기 IMU(1002)의 이동이 상기 수술용 톱의 알려진 이동으로 상응하게 옮겨진다. 알려진 위치로 상기 대퇴골에 고정 장착된 나머지 IMU(1002)를 고려할 때, 상기 대퇴골 및 수술용 톱 모두의 위치 변화에 대하여 (가속 데이터를 통하여) 상기 소프트웨어 시스템에 동적으로 업데이트된 정보를 제공하기 위하여 상기 IMU는 함께 작동된다.
상기 소프트웨어 프로그램은 상기 환자의 대퇴골의 가상 모델 및 당해 수술용 공구, 이 경우, 수술용 톱의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 대퇴골의 가상 모델, 및 상기 수술용 톱 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 수술용 톱 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 대퇴골 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 수술용 톱이 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 정확한 뼈를 절단하기 위하여 상기 수술용 톱을 정확히 배향하기 위하여 상기 수술용 톱을 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 필요한 뼈 절단이 이루어진 후, 상기 IMU(1002)는 상기 수술용 톱으로부터 제거되어 리머에 단단히 고정되고 (상기 골수내관을 정확히 리밍하기 위하여), 그 후, 상기 삽입기 방향에 대하여 알려진 방향으로 대퇴골 스템 삽입기에 장착된다. 그 후 상기 스템 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 대퇴골 스템 임플란트를 상기 리밍된 골수내관 내에 배치하기 위하여 이용되며, 상기 소프트웨어는 상기 대퇴골 및 스템 삽입기의 위치를 실시간으로 계산하기 위하여 상기 가속 피드백을 이용하고, 상기 그래픽 사용자 인터페이스를 통하여 이러한 위치 데이터를 상기 외과의에게 디스플레이한다.
예시적인 형태에서, 전체 어깨 관절성형술 과정의 맥락에서, 도 187 및 도 188에 나타낸 바와 같이, 등록 도구는 소정의 방향으로 상기 환자의 인체를 결합하여 상기 템플릿 수술 계획을 재현하는 데에 이용된다. 각각의 유틸리티 IMU(1002)가 그의 등록 도구(상기 상박골에 대하여 하나, 상기 견갑골에 대하여 두 번째 것)에 장착될 때, 상기 등록 도구는 소정의 방향(상기 환자 인체를 상기 IMU "제로"에 정밀하게 매칭하는 단 하나의 방향)으로 해당 뼈에 장착된다. 이러한 등록을 수행하기 위하여, 제 2 참조 IMU는 당해 뼈에 단단히 장착된다(하나의 IMU는 상기 상박골에 장착되고, 제 2 IMU는 상기 견갑골에 장착된다). 달리 말하자면, 하나의 유틸리티 IMU는 상기 상박골 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 상박골에 단단히 장착된다. 상기 견갑골의 맥락에서, 하나의 유틸리티 IMU는 상기 견갑골 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 견갑골에 단단히 장착된다. 상기 등록 프로세스의 일부로서, 상기 컴퓨터의 소프트웨어는, 상기 등록 도구가 최종적으로 고정되고 그의 고유한 위치 및 방향으로 위치될 때, 상기 유틸리티 IMU의 "제로" 위치를 계산하기 위하여 두 IMU(유틸리티 및 참조)로부터의 출력을 이용한다. 그 후, 상기 IMU(1002)는, 상기 수술용 공구의 적절한 방향 및 배치를 보장하기 위하여, 상기 해당 등록 도구로부터 이동되어 수술용 공구(리머, 톱, 임플란트 배치 가이드, 등)에 소정의 방식으로 장착될 수 있다. 상기 IMU(1002)는 상기 수술 과정이 종료될 때까지 연속적으로 각각의 수술용 공구에 장착되고 그로부터 이동될 수 있다.
이러한 예시적인 실시예에서, 도 188에 나타낸 바와 같이, 상기 견갑골 등록 도구는 단일의 방향(회전 위치 및 각도 위치 포함)으로만 상기 환자의 관절와 캐비티 내에 맞추어지도록 고유의 돌출부 형상을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위한 IMU(1002) 등록 홀스터(holster)를 포함하므로, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 고유 돌출부에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 견갑골에 단단히 고정된다. 상기 등록 도구의 고유의 돌출부가 상기 환자의 관절와 캐비티 내에서 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 견갑골에 장착된 상기 IMU(1002)가 가동될 때), 상기 계획된 임플란트 컵 방향(상기 등록 도구의 고유의 돌출부가 단일의 정확한 방향으로만 상기 관절와 캐비티 내에 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 정확한 위치에 있음을 지시하고 상기 소프트웨어는 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 IMU(1002)는 상기 유틸리티 IMU(1002)를 기타 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 견갑골 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 견갑골 등록 도구에 장착된)는 리밍 방향에 대하여 알려진 방향으로 컵 리머에 단단히 고정되어, 상기 견갑골에 대한 상기 컵 리머의 방향이 알려지게 되고, 두 IMU(상기 컵 리머에 장착된 IMU(1002) 및 골반에 장착된 IMU(1002))를 통하여 동적으로 업데이트된다.
상기 소프트웨어 프로그램은 상기 환자 견갑골의 가상 모델 및 당해 수술용 공구, 이 경우, 컵 리머의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 견갑골의 가상 모델, 및 상기 컵 리머 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 특정 컵 리머 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 견갑골 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 리머가 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 리머를 정확히 배향하기 위하여 상기 리머를 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 상기 컵 리머를 이용한 리서피싱이 완료된 후, 상기 IMU(1002)는 상기 컵 리머로부터 제거되어 상기 삽입기 방향에 대하여 알려진 방향으로 컵 삽입기에 단단히 고정된다. 그 후 상기 컵 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 컵 임플란트를 배치하기 위하여 이용되며, 상기 가속 피드백은 상기 컵 삽입기에 대한 상기 견갑골의 위치에 관련하여 실시간 피드백을 제공하기 위한 위치를 계산하기 위하여 상기 소프트웨어에 의하여 이용된다. 컵을 위치시키는 것의 이전 또는 이후에 상기 견갑골에 드릴링에 의하여 홀을 형성하기까지, 상기 등록 도구에 미리 장착된 상기 IMU(1002)는 상기 견갑골에 대하여 상기 드릴의 정확한 방향으로 보장하기 위하여 수술용 드릴에 단단히 고정될 수 있다. 상기 상박골 스템 요소의 배치를 돕기 위하여 상기 소프트웨어 시스템과 함께 유사한 IMU 등록 도구 및 세트를 이용할 수도 있다.
예시적인 실시예에서, 상기 상박골 등록 도구는 단일의 방향으로만(회전 위치 및 각도 위치를 포함) 상기 환자의 상박골 위로 부분적으로 맞추어지는 형상으로 된 말단을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위하여 IMU(1002) 등록 홀스터를 포함하여, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 말단 형태에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 상박골에 단단히 고정된다. 상기 등록 도구가 상기 상박골 경부에 대하여 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 상박골에 장착된 상기 참조 IMU(1002)가 가동될 때), 상기 상박골 방향(상기 말단 형태가 단일의 정확한 방향으로만 상기 상박골 경부 위로 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 상기 정확한 위치에 있고 고정되어 있음을 지시하고, 상기 소프트웨어는 사전-계획된 방향의 참조 방향을 설정하기 위하여 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 유틸리티 IMU(1002)는 상기 IMU(1002)를 기타 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 상박골 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 또 다른 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 상박골 등록 도구에 장착된)는 알려진 위치로 수술용 톱에 단단히 고정되어, 상기 IMU(1002)의 이동이 상기 수술용 톱의 알려진 이동으로 상응하게 옮겨진다. 알려진 위치로 상기 상박골에 고정 장착된 상기 참조 IMU(1002)를 고려할 때, 상기 상박골 및 수술용 톱 모두의 위치 변화에 대하여 (가속 데이터를 통하여) 상기 소프트웨어 시스템에 동적으로 업데이트된 정보를 제공하기 위하여 상기 IMU는 함께 작동된다.
상기 소프트웨어 프로그램은 상기 환자의 상박골의 가상 모델 및 당해 수술용 공구, 이 경우, 수술용 톱의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 상박골의 가상 모델, 및 상기 수술용 톱 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 수술용 톱 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 상박골 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 수술용 톱이 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 정확한 뼈를 절단하기 위하여 상기 수술용 톱을 정확히 배향하기 위하여 상기 수술용 톱을 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 필요한 뼈 절단이 이루어진 후, 상기 IMU(1002)는 상기 수술용 톱으로부터 제거되어 리머에 단단히 고정되고 (상기 상박골관을 정확히 리밍하기 위하여), 그 후, 상기 삽입기 방향에 대하여 알려진 방향으로 상박골 스템 삽입기에 장착된다. 그 후 상기 스템 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 상박골 스템 임플란트를 상기 리밍된 관 내에 배치하기 위하여 이용되며, 상기 소프트웨어는 상기 상박골 및 스템 삽입기의 위치를 실시간으로 계산하기 위하여 상기 가속 피드백을 이용하고, 상기 그래픽 사용자 인터페이스를 통하여 이러한 위치 데이터를 상기 외과의에게 디스플레이한다.
예시적인 형태에서, 반대 어깨 임플란트 과정의 맥락에서, 도 189 및 도 190에 나타낸 바와 같이, 등록 도구는 소정의 방향으로 상기 환자의 인체를 결합하여 상기 템플릿 수술 계획을 재현하는 데에 이용된다. 각각의 유틸리티 IMU(1002)가 그의 등록 도구(상기 상박골에 대하여 하나, 상기 견갑골에 대하여 두 번째 것)에 장착될 때, 상기 등록 도구는 소정의 방향(상기 환자 인체를 상기 IMU "제로"에 정밀하게 매칭하는 단 하나의 방향)으로 해당 뼈에 장착된다. 이러한 등록을 수행하기 위하여, 제 2 참조 IMU는 당해 뼈에 단단히 장착된다(하나의 IMU는 상기 상박골에 장착되고, 제 2 IMU는 상기 견갑골에 장착된다). 달리 말하자면, 하나의 유틸리티 IMU는 상기 상박골 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 상박골에 단단히 장착된다. 상기 견갑골의 맥락에서, 하나의 유틸리티 IMU는 상기 견갑골 등록 도구에 장착되는 반면 제 2 참조 IMU는 상기 견갑골에 단단히 장착된다. 상기 등록 프로세스의 일부로서, 상기 컴퓨터의 소프트웨어는, 상기 등록 도구가 최종적으로 고정되고 그의 고유한 위치 및 방향으로 위치될 때, 상기 유틸리티 IMU에 대한 "제로" 위치를 계산하기 위하여 두 IMU(유틸리티 및 참조)로부터의 출력을 이용한다. 그 후, 상기 IMU(1002)는, 상기 수술용 공구의 적절한 방향 및 배치를 보장하기 위하여, 상기 해당 등록 도구로부터 이동되어 수술용 공구(리머, 톱, 삽입기, 드릴 가이드, 드릴, 등)에 소정의 방식으로 장착될 수 있다. 상기 IMU(1002)는 상기 수술 과정이 종료될 때까지 연속적으로 각각의 수술용 공구에 장착되고 그로부터 이동될 수 있다.
이러한 예시적인 실시예에서, 도 188에 나타낸 바와 같이, 상기 견갑골 등록 도구는 단일의 방향(회전 위치 및 각도 위치 포함)으로만 상기 환자의 관절와 캐비티 내에 맞추어지도록 고유의 돌출부 형상을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위한 IMU(1002) 등록 홀스터(holster)를 포함하므로, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 고유 돌출부에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 견갑골에 단단히 고정된다. 상기 등록 도구의 고유의 돌출부가 상기 환자의 관절와 캐비티 내에서 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 견갑골에 장착된 상기 IMU(1002)가 가동될 때), 상기 계획된 임플란트 컵 방향(상기 고유의 돌출부가 단일의 정확한 방향으로만 상기 관절와 캐비티 내에 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 정확한 위치에 있음을 지시하고 상기 소프트웨어는 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 IMU(1002)는 상기 유틸리티 IMU(1002)를 기타 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 견갑골 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 견갑골 등록 도구에 장착된)는 리밍 방향에 대하여 알려진 방향으로 컵 리머에 단단히 고정되어, 상기 견갑골에 대한 상기 컵 리머의 방향이 알려지게 되고, 두 IMU(상기 컵 리머에 장착된 IMU(1002) 및 골반에 장착된 IMU(1002))를 통하여 동적으로 업데이트된다.
상기 소프트웨어 프로그램은 상기 환자 견갑골의 가상 모델 및 당해 수술용 공구, 이 경우, 컵 리머의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 견갑골의 가상 모델, 및 상기 컵 리머 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 특정 컵 리머 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 견갑골 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 리머가 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 리머를 정확히 배향하기 위하여 상기 리머를 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 상기 컵 리머를 이용한 리서피싱이 완료된 후, 상기 유틸리티 IMU(1002)는 상기 컵 리머로부터 제거되어 알려진 방향 및 위치로 드릴 판에 단단히 고정된다. 그 후 상기 드릴 판은 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 견갑골에 홀을 드릴링하기 위하여 이용되며, 상기 가속 피드백은 상기 드릴 판에 대한 상기 견갑골의 위치에 관련하여 실시간 피드백을 제공하기 위한 위치를 계산하기 위하여 상기 소프트웨어에 의하여 이용되고, 상기 관절와 베이스 판을 위치시킴 및 상기 관절와 요소 볼의 장착이 이어진다. 비록 요구되는 것은 아니나, 상기 드릴 판을 통하여 홀을 드릴링할 때, 상기 드릴 판에 대하여 상기 드릴의 정확한 방향을 보장하기 위하여 상기 유틸리티 IMU(1002)이 수술용 드릴에 단단히 고정될 수 있다. 상기 상박골 스템 요소의 배치를 돕기 위하여 상기 소프트웨어 시스템과 함께 유사한 IMU 등록 도구 및 세트를 이용할 수도 있다.
예시적인 실시예에서, 상기 상박골 등록 도구는 단일의 방향으로만(회전 위치 및 각도 위치를 포함) 상기 환자의 상박골 위로 부분적으로 맞추어지는 형상으로 된 말단을 갖는 연장된 축을 포함한다. 상기 등록 도구의 전단부는 상기 IMU(1002)를 수용하기 위하여 IMU(1002) 등록 홀스터를 포함하여, 상기 IMU(1002)가 상기 홀스터 내에 로킹될 때, 상기 IMU(1002)는 상기 등록 도구 및 말단 형태에 대하여 단단히 고정된다. 상기 등록 도구에 일치하게, 제 2 참조 IMU(1002)는 알려진 위치로 상기 상박골에 단단히 고정된다. 상기 등록 도구가 상기 상박골 경부에 대하여 정확히 배향될 때 (및 상기 등록 홀스터 내에 로킹된 상기 IMU(1002) 및 상기 상박골에 장착된 상기 참조 IMU(1002)가 가동될 때), 상기 상박골 방향(상기 말단 형태가 단일의 정확한 방향으로만 상기 상박골 경부 위로 수용될 때 설정됨)에 대하여 상기 등록 홀스터에 로킹된 상기 IMU(1002)의 방향이 알려진다. 작업자는 상기 소프트웨어 시스템에게 상기 IMU가 상기 정확한 위치에 있고 고정되어 있음을 지시하고, 상기 소프트웨어는 상기 유틸리티 IMU "제로"에 대하여 각각의 IMU의 위치를 기록한다. 상기 등록 도구(홀스터에 로킹된 상기 IMU(1002)를 갖는)는 상기 인체로부터 제거되고, 그 후 상기 유틸리티 IMU(1002)는 상기 IMU(1002)를 기타 수술용 공구에 장착할 준비로 상기 등록 홀스터로부터 제거된다.
예를 들어, 이전에 상기 상박골 등록 도구에 장착된 상기 IMU(1002)는 상기 도구로부터 제거되어 알려진 위치로 또 다른 수술용 공구에 장착된다. 예시적인 형태에서, 상기 IMU(1002)(이전에 상기 상박골 등록 도구에 장착된)는 알려진 위치로 상박골 절제 블록에 단단히 고정되어, 상기 IMU(1002)의 이동이 상기 절제 블록의 알려진 이동으로 상응하게 옮겨진다. 알려진 위치로 상기 상박골에 고정 장착된 상기 참조 IMU(1002)를 고려할 때, 상기 상박골 및 절제 블록 모두의 위치 변화에 대하여 (가속 데이터를 통하여) 상기 소프트웨어 시스템에 동적으로 업데이트된 정보를 제공하기 위하여 상기 IMU는 함께 작동된다.
상기 소프트웨어 프로그램은 상기 환자의 상박골의 가상 모델 및 당해 수술용 공구, 이 경우, 상박골 절제 블록의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 상박골의 가상 모델, 및 상기 절제 블록 및 기타 이용될 수 있는 수술용 공구에 대하여 상기 시스템에 미리 설치된 상기 특정 절제 블록 또는 기타 수술용 공구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 상기 상박골 및 수술용 공구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 절제 블록이 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 정확한 뼈를 절단하기 위하여 상기 절제 블록을 정확히 배향하기 위하여 상기 절제 블록을 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 더불어 또는 양자택일적으로, 상기 유틸리티 IMU(1002)는 각각 참조 핀이 삽입될 하나 이상의 홀을 드릴링하기 위하여 이용되는 드릴 판에 장착될 수 있다. 이 경우, 하나 이상의 참조 핀을 이용하여 상기 수술용 블록이 적절히 위치되고 배향되면, 상기 절제 블록은 IMU를 반드시 수반하지 않아도 된다. 여하튼, 필요한 뼈 절단이 이루어진 후, 상기 IMU(1002)는 상기 수술용 공구로부터 제거되어 리머에 단단히 고정되고 (상기 상박골관을 정확히 리밍하기 위하여), 그 후, 상기 삽입기 방향에 대하여 알려진 방향으로 상박골 스템 삽입기에 장착된다. 그 후 상기 스템 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 상박골 스템 임플란트를 상기 리밍된 관 내에 배치하기 위하여 이용되며, 상기 소프트웨어는 상기 상박골 및 스템 삽입기의 위치를 실시간으로 계산하기 위하여 상기 가속 피드백을 이용하고, 상기 그래픽 사용자 인터페이스를 통하여 이러한 위치 데이터를 상기 외과의에게 디스플레이한다.
요소 배치에 더하여, 수술-후 합병증을 예방하고 전반적인 환자 만족도를 개선하기 위하여, 요소 회전을 추적하기 위하여 상기 골반 및 대퇴골에 장착된 상기 IMU를 이용하여 상기 요소의 잠재적인 충돌을 테스트할 수 있다.
IMU(1002)의 이용에 대하여 상술된 바의 개시 내용에 따라, 각각의 IMU의 자이로스코프, 가속도계, 및 자력계로부터 3차원적 위치 데이터를 발생하는 데에 이용되는 수학적 모델 및 알고리즘에 대하여 다음에 예시적으로 설명한다. 예시적인 형태에서, 각각의 IMU 프로세서는 상기 IMU의 자이로스코프, 가속도계, 및 자력계로부터의 입력에 기초하여 상기 IMU(1002)의 위치 변화를 계산하기 위하여 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법(SMC)을 이용하도록 프로그램된다. 상기 IMU 데이터 스트림은 3개의 X, Y, Z 축(Gl) 상의 1세트의 자이로스코프 데이터, X, Y, Z 축(A1-A3) 상의 3세트의 가속도계 데이터, 및 3개의 X, Y, Z 축(M1-M3) 상의 3세트의 자력계 데이터로 구성된다. 상기 IMU(1002)의 방향 추적은 각각의 센서(즉, Gl, Al, Ml)로부터의 하나의 데이터 세트에 따라 이루어질 수 있다.
Gl, Al, 및 Ml를 일 예로 이용하고 상기 센서 미가공 데이터 모두가 변환되고 처리된 것으로 가정하여:
시간 및 상태 = 1에서:
1) 상기 알고리즘은 우선, 아래에 명시된 알고리즘 1로 나타낸 바와 같이, 상기 폰 미제스 피셔 밀도의 미리-결정된 분산 인자로서 상기 중립 위치 주위에 N 입자 세트를 발생한다. 각각의 입자는 쿼터니언 형태로 X, Y, Z 축 주위의 방향을 나타낸다. 달리 말하자면, 상기 입자는 동일한 확률 밀도 공간으로부터 이끌어낸 독립적이고 동일하게 분포된 확률변수 세트로 이루어진다. 방향 추적 적용에 있어서, 상기 입자는 관찰된 방향의 상기 통계적으로 이루어진 변화이다. 그러나, 상기 알고리즘은 더 많은 표본을 수집할수록 그의 특성을 최적화하므로 상기 정확한 통계(분산 인자)는 '알려질' 필요가 없음에 주의해야 한다. 초기 추측으로서 보다 높은 가변성을 이용하고 상기 알고리즘으로 하여금 이를 개선하도록 하는 것이 바람직하다.

Gl , Al , 및 Ml로부터 제 1 데이터 세트를 수신한 후, 상기 IMU의 현재 방향 추정이 계산된다. 이는 상기 틸트를 아는 것에 의하여 달성되며, 이는 Al로부터 측정된다. 아래에 명시된 알고리즘 2에서 단계 2 및 3에 나타낸 바와 같이, 상기 틸트 정보는 상기 자력계 판독을 수학적으로 정정(재-회전)하는 데에 필요하다. 그 후, 상기 Al 및 Ml 데이터는 가우스 뉴턴 최적화 방법에 기초한 알고리즘 2를 통하여 상기 IMU의 초기 방향을 추정하는 데에 이용된다. 알고리즘 2의 목적은 상기 방향(q0bv)을 반복적으로 결정하여 상기 추정의 틸트 및 헤딩 요소가 허용 범위의 오차를 갖는 Al 및 Ml로부터의 판독과 동일하게 되게 하는 것이다. 알고리즘 2는 이전 상태로부터의 입력을 필요로 하지만, 시간=1에서는 이전 상태가 없으므로, 아무런 입력도 충분할 것임을 주의해야 한다. 가속도계 및 자력계가 방향 추적에 단독으로 사용될 수 없는 이유는 가속도계가 틸트를 측정하는 방법에 대한 제한 때문이다. 예를 들어, 여러 특정 방향에서, 삼각법 사분면의 특성 상, 상기 틸트의 출력은 상기 IMU가 상이한 방향에 있음에도 불구하고 동일할 수 있다. 따라서, 상기 자이로스코프는 상기 IMU가 존재하는 사분면의 추적을 유지하는 데에 필요하다.

다음으로, 중립 위치(qvMF)에서 상기 N 입자 세트는 '회전'되어, 다음의 방정식에 따라, 그들의 평균이 Al 및 Ml로부터의 방향 추정에서 중심에 오도록 조정된다:
그 후, 모든 상기 입자는 G1상에서 시간에 기초하여, 다음의 방정식을 이용하여, 순방향으로 추정된다:
여기에서 ω는 시간(t)에서 측정된 각도 비율이고, 및 Δt는 샘플링 주기이다.
달리 말하자면, Gl가 X 축 주위의 각속도를 나타내면; 모든 상기 입자는 뉴턴의 운동 방정식에 기초하여 X축 주위로 회전된다.
상기 현재 상태에서의 방향 예상은 아래에 명시된 알고리즘 3으로 상기 입자 추정(qest,i(t + 1)을 평균화함으로써 달성된다. 쿼터니언은 4차원 벡터이므로, 상기 평균화는 상이한 방식으로 수행된다. 알고리즘 3은 단 하나가 남을 때까지 상기 입자 세트로부터 2개의 쿼터니언을 반복적으로 보간한다.

시간 및 상태 = 2에서, 제 2 데이터 세트가 수신된다. 문단 [380]에 나타낸 바와 동일한 방법(알고리즘 2)을 이용함으로써, 최근의 방향 추정이 계산되어, 이전 상태(qest,i(t - 1))로부터의 모든 입자 추정에 비교된다. 각각의 입자와 현재 방향 추정 사이의 오차/잔차는 다음의 방정식을 이용하여 상기 입자의 정확도에 가중치를 부여하는데에 이용된다 (즉, 상기 추정에 더 가까운 입자는 더 멀리 있는 입자보다 더 높은 가중치를 받는다.):


δres,i는 상기 입자와 현재 관찰 사이의 나머지 3D 각도 차이이다.
W는 상기 입자의 가중치이다.
다음으로, 매우 낮은 가중치를 갖는 입자를 제거하고 리샘플링하기 위하여 상기 입자의 질이 평가된다. 이는 결정론적, 나머지 또는 보조 리샘플링 계획을 이용하여 수행될 수 있다. 상기 알고리즘은 상기 관찰에 가까운 입자를 선호하므로, 상기 입자 세트는 시간에 따라 다양성을 잃기 시작한다. 상기 입자는 매우 집중되게 되고 더 이상 통계적 의미를 갖지 않는다. 이 시간에, 상기 입자의 작은 부분은 다양성을 증가시키기 위하여 대체된다. 이는 상기 입자의 현재 분산 인자에 대한 1차 평가에 의하여 수행된다. 상기 분산 인자가 높은 농도를 나타내면, 상기 현재 입자의 일부를 대체하기 위하여 소정의 분산 인자에 기초하여 중립 위치에 새로운 입자 세트가 발생된다. 상기 새로운 입자는 상기 중립 위치로부터 상기 현재 방향 예상까지 회전된다. 이는 다음의 방정식으로 요약된다:

또한, 이러한 SMC 방법 알고리즘은 시간 의존적이므로, 상기 수신되는 신호의 지연 또는 상기 IMU 데이터 스트림에 대한 일시적인 연결 끊김은 상기 추정에 부정적인 효과를 초래할 수 있다. 상기 IMU 데이터 스트림에 대한 연결이 면밀히 모니터되지 않으면, 상기 입자 세트는 분기되어 상기 필터를 불안정화할 수 있다. 이러한 SMC 방법 알고리즘은 과도한 분기를 방지하기 위하여 각각의 반복이후에 상기 입자 세트의 특성을 추적한다.
마지막으로, 상기 입자는 Gl로부터의 새로운 데이터에 대하여 기초하여 시간에서 순방향 추정되고 상기 현재 방향 상태는 다시 계산된다. 상술한 바의 프로세스 및 알고리즘은 Gl , Al, 및 Ml로부터 새로운 데이터가 수신될 때마다 매번 다시 이용된다.
외상 판의 제작
도 112-125를 참조하여, 예시적인 과정 및 시스템은 소정의 집단 전체에 걸쳐 뼈 판(즉, 외상판)을 제작하기 위하여 설명된다. 당업자는 골절에 이어 뼈 자체를 복구하기 위하여 골 재생을 거칠 수 있음을 안다. 상기 골절의 심각성 및 위치에 따라, 종래기술에서 이용되는 외상 판은 종종 불규칙한 뼈 형상에 맞추어 상기 뼈 골절들 사이에 최대한 접촉되도록 작업실에서 구부러짐 및 기타 변형을 취해야 한다. 그러나, 과도한 구부림은 상기 외상 판의 수명을 단축시키고, 이는 뼈 플레이트 불량 및/또는 외상 판-나사 고정의 헐거움을 유발할 수 있다. 본 과정 및 시스템은 수술-중에 상기 플레이트의 윤곽을 잡는 일을 줄이거나 없앨 수 있도록 보다 정확한 외상판 형상을 제공하며, 이에 플레이트 수명을 늘리고 뼈 판-나사 고정의 헐거움이 발생될 때까지의 시간을 늘릴 수 있다.
외상 판 제작을 위하여 전술된 예시적인 설명은 외상 판이 적용될 수 있는 임의의 및 모든 뼈에 적용가능하다. 간결성을 위하여, 상기 예시적인 설명에서는 상기 상박골 뼈와 함께 사용되기 위한 외상판의 제작을 위한 시스템 및 과정을 설명한다. 그러나, 상기 과정 및 시스템은 인체의 기타 뼈 및 해당 외상판의 제작에도 동일하게 적용되며 상박골 외상 판에 제한되지 않는다.
외상판을 제작하기 위한 상기 예시적인 과정 및 시스템의 일부로서, 스태티스티컬 뼈 아틀라스는 상기 당해 뼈(들)을 위하여 제작 및/또는 이용된다. 설명하자면, 당해 뼈는 상박골로 이루어진다. 당업자는 스태티스티컬 아틀라스 및 하나 이상의 뼈에 있어서 스태티스티컬 아틀라스를 어떻게 구성하는지에 대하여 익숙하다. 따라서, 상기 스태티스티컬 뼈 아틀라스를 구성하는 것에 대한 세부 사항의 설명은 간결성을 도모하기 위하여 생략한다. 그럼에도 불구하고, 상기 예시적인 시스템 및 과정의 스태티스티컬 뼈 아틀라스에 대하여 독특할 수 있는 것은 성별, 연령, 민족성, 변형, 및/또는 부분적인 구성에 기초하여 상기 스태티스티컬 뼈 아틀라스에 상박골 카테고리로 분류한다. 이러한 방식으로, 하나 이상의 외상 판은 전술한 바의 하나 이상의 카테고리에 대량 맞춤화될 수 있고, 여기에서 상기 하나 이상의 카테고리는 특정 뼈 집단을 설정한다.
예시적인 형태에서, 상기 스태티스티컬 뼈 아틀라스는 다양한 형식으로 될 수 있는 이체 데이터를 포함한다. 예를 들어, 상기 스태티스티컬 뼈 아틀라스는 2차원적 또는 3차원적 영상뿐만 아니라 뼈 파라미터에 대한 정보를 포함할 수 있고, 상기 뼈 파라미터로부터 측정이 이루어질 수 있다. 예시적인 아틀라스 입력 데이터는 X-선 영상, CT 스캔 영상, MRI 영상, 레이저 스캔 영상, 초음파 영상, 분할된 뼈, 물리적 측정 데이터, 및 뼈 모델의 제작이 가능한 임의의 기타 정보의 형식으로 될 수 있다. 이러한 입력 데이터는 3차원적 뼈 모델을 구성하기 위하여 상기 스태티스티컬 아틀라스 데이터에 소프트웨어 액세스(accessing)(상기 스태티스티컬 아틀라스의 일부로서 제작 및 저장된 3차원적 뼈 모델에 액세스)함으로써 이용되며, 그로부터 상기 소프트웨어는 3차원으로 평균적인 뼈 모델 또는 템플릿 뼈 모델을 제작하도록 작동된다.
상기 템플릿 뼈 모델을 이용하여, 상기 소프트웨어는 상기 템플릿 뼈 모델의 외표면 상에 포인트를 자동으로 지정하거나 또는 수동을 지정할 수 있다. 설명하자면, 상박골 모델에 있어서, 상기 소프트웨어의 사용자는 상기 상박골 모델의 외표면 상에 상기 외상 판의 형상을 개략적으로 아우트라인 처리함으로써 궁극적인 외상판에 대한 개략적인 경계 형상을 설정한다. 상기 외상 판의 개략적인 경계 형상은 또한 외부 경계에 해당하는 상기 상박골 모델의 외표면 상에 일련의 포인트를 지정하는 사용자에 의하여 달성될 수 있다. 상기 외부 경계 또는 경계 포인트가 일단 설정되면, 상기 소프트웨어는 상기 설정된 경계 내에서 상기 상박골 모델의 외표면 상에 포인트를 자동으로 지정하거나 또는 수동 지정을 가능하게 할 수 있다. 예를 들어, 상기 소프트웨어는 퍼센트 채움 작업을 제공하며, 이에 따라 상기 사용자는 상기 상박골 모델의 외부에서 명백한 위치에 해당하는 일련의 포인트에 의하여 지정되는 상기 외상 판의 경계 내에서 퍼센트를 지정할 수 있다. 또한, 상기 소프트웨어는 수동 포인트 지정 특징을 제공하며, 이에 따라 상기 사용자는 상기 경계 내에서 상기 상박골 모델의 외표면 상에 하나 이상의 포인트를 지정할 수 있다. 수동 포인트 지정이 이용되는 경우, 상기 사용자는 상기 상박골 모델의 외부에 포인트를 지정하기 위한 시작단계로 경계를 설정할 필요가 없음을 이해해야 한다. 오히려, 포인트의 수동 지정이 완료될 때, 지정된 최외곽 포인트에 의하여 상기 경계가 설정된다.
상기 템플릿 뼈 모델의 외표면 상에 포인트 지정이 완료된 후, 상기 국소화된 포인트는 당해 뼈 집단 전체에 걸쳐 전파된다. 특히, 상기 국소화된 포인트는 상기 스태티스티컬 아틀라스의 포인트 관련성을 통하여 상기 소프트웨어에 의하여 상기 특정 집단 내에서 각각의 3차원 뼈 모델에 자동으로 적용된다. 예를 들어, 상기 특정 뼈 집단은 백인 여성으로부터의 상박골로 이루어지도록 성별 및 민족성에 따른 맞춤형으로 될 수 있다. 상기 집단의 각각의 뼈 모델에 대하여 전파된 포인트를 이용하여, 상기 소프트웨어는 각각의 뼈의 외상 판의 3차원적 랜더링을 생성하기 위하여 3차원적 채움 과정을 이용하여 상기 경계 내에서 포인트 간의 보이드(void)를 채운다. 그 후, 상기 소프트웨어는 세선화 과정을 통하여 상기 각각의 외상 판의 3차원적 랜더링의 길이방향 정중선을 계산한다.
각각의 3차원적 외상 판 랜더링의 정중선은 그의 길이를 따라 다양한 곡률을 갖는 3차원적 정중선으로 이루어진다. 상기 소프트웨어는 상기 3차원적 정중선을 추출하고, 최소 제곱법을 이용하여, 상기 3차원적 정중선의 주요곡률에 협조적으로 가장 근사치로 되는 상기 바람직한 수의 곡률반경을 결정한다. 상박골에 있어서는, 3개의 곡률반경이 상기 정중선 곡률에 정확하게 근사치로 됨이 결정되었다. 그러나, 이 수는 상기 뼈 집단 및 상기 외상 판의 경계에 따라 변화될 수 있다. 추가의 특징으로 상기 판의 길이를 따라 하나 이상의 위치에서의 단면 곡률, 근육의 위치, 신경 및 기타 피해야할 연조직, 또는 플레이트 크기 또는 형상을 정의하는 데에 관련된 기타의 특징 또한 이에 포함할 수 있다. 예를 들어, 상기 정중선에 대한 상기 3개의 곡률 반경은 상기 근위부 상박골에서 상기 외상 판의 구부러짐, 상기 상박골 축과 상기 상박골 헤드 사이의 전이, 및 상기 상박골 축의 곡률을 나타낸다. 각각의 곡률반경은 기록되고, 4개의 치수 특징 벡터는 상기 집단에 최상으로 맞는 군에 상기 반경을 클러스터링하기 위하여 상기 곡률반경 데이터에 적용되었다. 예시적인 형태에서, 상기 클러스터 데이터는 다중 외상 판이 상기 집단에 적절히 맞아야 한다는 것을 나타낼 수 있다. 일단 상기 곡률반경 데이터가 클러스터링 되면, 상기 외상 판 치수가 확정될 수 있다.
상기 플레이트 설계에 관련된 특징의 추출에 따라, 상기 소프트웨어는 상기 집단에 맞는 클러스터의 최상의 수를 결정한다. 도 120에 개략적으로 나타낸 바와 같이, 국소 최저점을 제공하는 2개 이상의 클러스터가 있는 경우도 있음을 주지해야 한다. 허용 가능한 허용 오차뿐만 아니라 각각의 패밀리에서 합리적인 수의 판을 제공하는 최적의 선택을 결정하기 위하여, 상기 소프트웨어는 각각의 클러스터에서 상기 판에 대한 3차원적 표면 모델을 생성한다. 그리고 나서, 상기 집단 상에 이들 판을 배치함으로써 그리고 상기 플레이트와 상기 뼈 표면 사이의 불일치를 계산함으로써 자동 평가가 수행된다. 이러한 분석의 결과는 상기 소프트웨어로 하여금 이러한 특이적 집단에 사용되기 위한 최적의 수의 판을 선택할 수 있도록 한다. 그리고 나서, 상기 최종 플레이트 모델은 파라미터화되고, 근육 및 연조직 위치를 피하면서 고정을 최대화하는 방식으로 나사 위치가 각각의 플레이트 상에 배치된다. 상기 나사의 폭은 상기 집단 전체에 걸쳐 각각의 나사 레벨에서 상기 뼈의 단면 분석을 행함으로써 결정된다.
본 과정 및 방법은 카데바 연구를 이용함으로써 상박골에 대하여 검증되었다. 특히, 백인 여성으로부터의 카데바 상박골 뼈에 CT 스캔을 행하였다. 각각의 상박골에 대한 개별적인 3차원적 모델을 생성하기 위하여 상기 소프트웨어에 의하여 이들 CT 스캔을 이용하였다. 이러한 검증 연구에 이용된 상기 CT 스캔이나 상기 3차원적 모델 어느 것도 상기 스태티스티컬 아틀라스 및 상기 상박골 외상 판을 제작하기 위하여 이용된 관련 집단의 일부가 아님을 주지해야 한다. 따라서, 상기 CT 스캔이나 상기 3차원적 모델 어느 것도 새로운 데이터 및 설계된 상기 상박골 외상 판을 검증하기 위하여 이용되는 모델로 이루어지지 않는다. 상기 3차원적 검증 모델이 제작된 후, 각각의 상기 모델은 특정 클러스터(상기 설계 집단으로부터의 상기 상박골 외상 판을 설계한 결과로서의 클러스터)에 카테고리 분류된다. 클러스터 상기 검증 모델이 카테고리 분류된 것에 기초하여, 상기 클러스터에 대하여 설계된 상박골 외상 판은 상기 적절한 검증 3차원적 상박골 뼈 모델에 맞춰지고, 상기 검증 3차원적 상박골 뼈 모델의 외표면과 상기 상박골 외상 판의 아래 표면 사이의 간격을 나타내는 치수가 계산된다. 도 123은 상기 뼈와 외상 판 사이의 최대 거리의 영역을 나타내도록 상기 검증 3차원적 상박골 뼈 모델에 맞춰지는 상기 외상 판의 거리맵을 나타낸다. 상기 외상 판의 대부분은 상기 뼈로부터 최소한으로 간격을 두며, 일치가 덜한 영역은 0.06 내지 0.09 센티미터의 범위로 된 간격을 보인다는 것을 알 수 있다. 따라서, 이러한 카데바 연구의 결과에서, 전술한 바의 시스템을 이용한 전술한 바의 예시적인 과정에 따라 설계된 외상 판은, 수술-중에 적용되었을 때, 수술 도중에 뼈 판을 구부리거나 수동으로 모양을 손보는 외과 전문의의 관례가 배제된, 비범한 정도의 윤곽 매칭을 가졌다는 것이 결정되었다.
도 131-138를 참조하면, 이러한 과정의 또 다른 예시적인 사례에 있어서, 외상 판은 상기 빗장뼈에 대하여 제작되었다. 이 때, 스태티스티컬 아틀라스는 여러 빗장뼈 뼈로부터 제작되었고, 이는 예를 들면 백인 집단에서의 변화를 충분히 포착하였다. 상기 스태티스티컬 아틀라스는 여러 민족성, 여러 연령대의 환자, 및 다양한 지리적 영역으로부터의 빗장뼈 뼈를 포함할 수 있음을 주의해야 한다. 상기 예시적인 개시 내용은 백인 집단 데이터 세트의 맥락에서 발생되는 것이나, 당업자는 설명된 상기 시스템 및 방법이 백인 집단 스태티스티컬 아틀라스에만 한정되는 것이 아님을 이해할 것이다. 도 132는 일반적인 빗장뼈 인체 구조를 나타낸다.
예시적인 형태에서, 상기 빗장뼈의 스태티스티컬 아틀라스는 또한 도 134에 나타낸 바와 같이, 각각의 빗장뼈에 대하여 근육 부착부위에 관련한 위치를 정의한다. 더욱이, 단면 윤곽은 상기 전체 뼈(도 138 참조)를 따라서 뿐만 아니라 근육 부착부위에서도 그리고 빗장뼈 허리(도 137 참조)에서도 10% 증분으로 추출하였다. 각각의 단면 윤곽의 최대 및 최소 치수를 계산하였다. 또한, 상기 데이터 세트에서 모든 빗장뼈 표면에 걸쳐 대응점 간의 크기 및 방향 차이를 분석함으로써 비대칭에 대하여 상기 전체 3-차원 표면을 검사하였다. 그 결과는 빗장뼈 비대칭, 즉, 좌측 빗장뼈가 우측 빗장뼈보다 길고, 상기 우측 빗장뼈가 상기 좌측 빗장뼈보다 두껍다는 것에 대한 기존의 연구와 일치한다. 그러나, 상기 비대칭 패턴은 도 139에 나타낸 바와 같이 남성과 여성 사이에 상이하다.
게다가, 도 133에 나타낸 바와 같이, 상기 빗장뼈 정중선은 기존의 빗장뼈 외상 판 설계에서와 같이 대칭적인 "S" 형상을 따르지 않는다. 그러므로, 본 개시 내용은 오늘날의 빗장뼈 외상 판이 상기 빗장뼈의 해부학적 곡률을 모방하지 못한다는 것을 확인해준다. 도 135 및 136에 있어서, 남성 빗장뼈는 모든 치수 및 근육 및 인대 부착부위 윤곽(p<.05)에서 크게 비대칭인 반면, 여성 비대칭은 좀 더 가변적이다. 그러나, 후방 중간축에서 근육이 부착되지 않은 영역은 두 성별에서 모두 크게 비대칭이었다.
상기 스태티스티컬 아틀라스에 걸쳐 추출된 빗장뼈 특징으로부터, 명백한 유사성 군(즉, 집단)을 결정하기 위하여 클러스터링(본 출원에서 앞서 설명하였고 이에 참고로 결부되는 클러스터링 방법에 따라서)을 수행하였으며, 상기 명백한 유사성 군(즉, 집단)으로부터의 각각의 명백한 군은 상기 집단에 최적으로 맞춰지는 특정 빗장뼈 외상 판에 연관된다. 또한, 연조직(근육 부착)을 최적으로 피하고 그리고 너무 길거나 짧은 나사로 인한 플레이트의 헐거움 또는 추가의 골절을 피하기 위하여 나사 고정 위치 및 길이를 각각의 외상 판 집단에 대하여 결정할 수 있다. 상기 과정을 이용하여, 도 140-149에 나타낸 바와 같이, 대량-맞춤화된 빗장뼈 외상 판에 상응하게 여러 빗장뼈 외상 판 패밀리를 설계하였다.
환자-맞춤형 외상 판의 제작
도 126을 참조하면, 환자-맞춤형 외상판 공정은 다양한 구성 부분을 포함하여 그래픽으로 묘사된다. 이들 구성 부분 중에는 사전수술계획, 사전에-윤곽형성된 환자-맞춤형 외상 판(들)의 생성, 상기 환자-맞춤형 외상 판(들)의 위치 및 장착을 위한 수술-중 가이던스, 및 상기 환자-맞춤형 외상 판(들)의 최적 수술-후 평가가 있다. 이들 구성 부분에 대한 보다 상세한 설명 및 각각의 구성 부분에 관련된 예시적인 공정 및 구조를 차례로 설명한다.
도 126-130를 참조하면, 예시적인 공정 흐름도는 사전수술계획 구성부분을 나타낸다. 당해 인체에 대하여 인체 데이터의 초기 입력을 얻는다. 단지 예시의 목적 상, 빗장뼈는 골절된 또는 기형 인체로서 설명되며 빗장뼈 외상 판은 환자-맞춤형 외상 판으로서 설명된다. 인체 데이터는 환자-맞춤형 빗장뼈 외상 판을 선택 또는 제작하기 위하여 구성되는 소프트웨어 패키지에 입력되며, 여기에서 상기 인체 데이터는, 예를 들면, 표면 모델 또는 포인트 클라우드의 형태로 될 수 있는, 상기 빗장뼈의 2차원적(2D) 영상 또는 3차원적(3D) 표면 표시로 이루어진다. 2D 영상이 이용되는 경우, 이들 2D 영상은 상기 골절된 빗장뼈의 3D 가상 표면 표시를 구성하는 데에 이용된다. 당업자는 3D 표면 표시를 구성하기 위하여 인체의 2D 영상을 이용하는 데에 익숙하다. 따라서, 이러한 과정에 대한 상세한 설명은 간결성을 도모하기 위하여 생략된다. 예를 들어, 입력된 인체 데이터는 하나 이상의 X-선, 컴퓨터 단층촬영(CT) 스캔, 자기 공명 영상(MRI), 또는 기타 영상화 데이터로 이루어질 수 있고, 이들로부터 당해 생체조직의 3D 표면 표시의 제작이 가능하다. 이러한 인체 데이터 입력으로부터의 출력은 상기 골절된 빗장뼈 구성 부분의 3D 가상 표면 표시이다.
상기 골절된 빗장뼈 구성 부분의 3D 가상 표면 표시는 골절의 위치 및 형상을 식별하기 위하여 또는, 완전한 골절 및 뼈 구성 부분의 이탈의 경우에는, 다른 뼈 요소에 대한 상기 뼈 요소의 위치 및 형상을 식별하기 위하여 평가된다.
완전한 골절 및 뼈 구성 부분의 이탈의 경우, 상기 프로세스 및 관련 소프트웨어는 패치워크 빗장뼈를 구성하기 위하여 상기 골절된 빗장뼈의 3D 가상 표면 표시를 수동으로 재위치시킬 수 있도록 하는 골절 감소 프로세스를 수행한다. 이러한 상황에서, 상기 3D 가상 표면 표시로 이루어지는 구성 부분으로부터 조립된 빗장뼈와 유사한 3D 패치워크 빗장뼈 모델을 제작하기 위하여 상기 골절된 빗장뼈의 3D 가상 표면 표시를 재위치시키고 재배향한다. 양자택일적으로, 상기 프로세스 및 관련 소프트웨어는 선택적으로 빗장뼈의 3D 템플릿 모델을 이용하여 패치워크 빗장뼈 모델을 구성하기 위하여 상기 골절된 빗장뼈의 3D 가상 표면 표시의 자동 재위치 및 재건을 도울 수 있다. 더욱 구체적으로, 상기 소프트웨어는 초기에 상기 3D 가상 표면 표시로 이루어지는 각각의 골절된 뼈 요소(즉, 상기 뼈 골절의 가장자리(들))에 대한 상기 3D 가상 표면 표시로부터 하나 이상의 골절 부위를 검출하고 각각의 골절 부위로부터 상기 윤곽을 추출한다. 상기 소프트웨어는 그러면 상기 추출된 윤곽을 3D 템플릿 빗장뼈 모델의 윤곽과 한 쌍으로 매칭시키기 위하여 이들 윤곽을 비교하고, 매칭되는 뼈 요소/조각을 각각의 골절 부위에 위치시킨다. 이들 매칭된 요소/조각은 그리하여 함께 그룹화된다. 상기 매칭된 요소/조각의 그룹화에 이어서, 상기 소프트웨어는 상기 3D 템플릿 빗장뼈 모델에 대하여 모든 상기 뼈 요소/조각의 정확한 위치를 식별하기 위하여 상기 그룹화된 조각을 상기 3D 템플릿 빗장뼈 모델에 매칭시킨다. 상기 매칭된 요소/조각은 그 후 상기 3D 템플릿 빗장뼈 모델과 유사한 3D 패치워크 빗장뼈 모델로 축소되고, 이는 이하에서 설명되는 바와 같이 3D 재건된 빗장뼈 모델을 구성하기 위하여 상기 소프트웨어에 의하여 이용된다.
축소 이후, 다시 도 7 및 도 127을 참조하면, 상기 3D 패치워크 빗장뼈는 당해 환자의 3D 패치워크 빗장뼈 모델에 가장 가깝게 유사한 인체 모델(예를 들어, 완전한 뼈 모델)을 상기 스태티스티컬 아틀라스에서 식별하는 데에 이용된다. 이러한 단계 상기 아틀라스에서 가장 가까운 뼈를 찾는 것으로 도 3에 설명된다. 상기 3D 패치워크 빗장뼈 모델에 가장 가깝게 유사한 뼈 모델을 상기 스태티스티컬 아틀라스에서 초기에 식별하기 위하여, 상기 3D 패치워크 빗장뼈 모델은 하나 이상의 유사성 행렬을 이용하여 상기 스태티스티컬 아틀라스 내 뼈 모델과 비교된다. 상기 초기 유사성 행렬(들)의 결과는 상기 스태티스티컬 아틀라스로부터의 뼈 모델을 선택하는 것이며, 이는 후속의 등록 단계에 "초기 추측"으로서 이용된다. 상기 등록 단계는 상기 3D 패치워크 빗장뼈 모델을 상기 선택된 아틀라스 뼈 모델(즉, 상기 초기 추측 뼈 모델)에 등록하고, 그 출력은 상기 아틀라스 뼈 모델에 맞춰 조정되는 환자-맞춤형 재건된 뼈 모델이다. 상기 등록 단계에 이어서, 조정된 "초기 추측"에 대한 형상 파라미터가 최적화되어 상기 형상이 상기 3D 패치워크 빗장뼈 모델에 매칭된다.
이 경우 상기 스태티스티컬 아틀라스로부터의 형상 파라미터는 최적화되어 비-골절된 뼈의 영역이 상기 재건된 환자-맞춤형 뼈 모델과 3D 패치워크 빗장뼈 모델 사이의 오차를 최소화하는 데에 이용된다. 형상 파라미터 값 변경은 상이한 인체 형상의 표시에 대하여 허용된다. 이러한 프로세스는 상기 재건된 형상의 수렴이 달성될 때까지 반복된다 ( 반복간의 상대적인 표면 변화로서 또는 허용된 반복의 최대수로서 측정될 수 있음).
이완 단계는 상기 3D 패치워크 빗장뼈 모델에 가장 잘 매칭되도록 상기 최적화된 뼈를 모핑하기 위하여 수행된다. 상기 예시적인 경우에 일치하게, 상기 수렴 단계로부터 출력되는 상기 3D 패치워크 빗장뼈 모델로부터 결손되는 인체는 상기 모핑된 3D 빗장뼈 모델에 적용되어, 상기 환자의 재건된 빗장뼈의 환자-맞춤형 3D 모델이 제작된다. 더욱 구체적으로, 상기 3D 패치워크 빗장뼈 모델 상의 표면 포인트는 상기 재건된 형상이 상기 환자-맞춤형 형상에 가장 잘 매칭되도록 상기 환자-맞춤형 3D 빗장뼈 모델 상에서 직접적으로 이완된다(즉 모핑된다). 이러한 단계의 출력은, 상기 환자의 빗장뼈의 정상적인/완전한 구조가 어떠해야 하는 지를 나타내는, 전체적으로 재건된, 환자-맞춤형 3D 빗장뼈 모델이다.
전체 인체 재건에 이어서, 상기 시스템 소프트웨어는 계획 감소 명령 프로세스를 개시한다. 이러한 계획 감소 명령 프로세스에서, 상기 소프트웨어는 어느 빗장뼈 뼈 구성 부분(즉, 골절된 빗장뼈 뼈 조각)이 어떤 순서로 서로 재조립 및 장착될지에 대하여 수동 또는 자동 결정을 가능하게 한다. 그렇게 함으로써, 상기 소프트웨어는 상기 뼈 구성 부분으로부터 상기 빗장뼈의 진행성 어셈블리의 3D 모델을 메모리에 기록한다. 따라서, 상기 빗장뼈가 6개의 구성 부분으로 골절된 것으로 가정하면, 상기 소프트웨어는 제 1 및 제 2 뼈 골절된 구성 부분이 조립된 어셈블리를 나타내는 제 1의 3D 모델을 기록하고, 이어서 제 1, 제 2, 및 제 3 뼈 골절된 구성 부분이 조립된 어셈블리를 나타내는 제 2의 3D 모델을 기록하며, 6개의 골절된 뼈 구성 부분 모두의 조립된 위치 및 방향을 반영하여 상기 3D 패치워크 빗장뼈 모델에 유사하게 되는 최종 3D 모델에 도달할 때까지 계속한다.
상기 감소 명령 결정을 이용함으로써, 상기 소프트웨어는 상기 3D 패치워크 빗장뼈를 이용하여 다수의 빗장뼈 외상 판 템플릿 중 하나의 수동 또는 자동 선택을 가능하게 한다. 더욱 구체적으로, 상기 빗장뼈 외상 판 템플릿은 스태티스티컬 뼈 아틀라스로부터 취한 소정의 집단에 관련된 크기 및 형상 파라미터에 매칭되도록 일반적인 형상으로 된 빗장뼈 외상 판의 일련의 3D 가상 표면 표시로 이루어진다. 달리 말하자면, 상기 스태티스티컬 뼈 아틀라스는 크기, 민족성, 연령, 성별, 및 뼈 형상을 나타내는 기타의 마커 중 하나 이상에 기초하여 분류된 다수의 평범한 전체 인체 빗장뼈의 표면 모델을 포함한다. 상기 템플릿 뼈 판에 도달하기 위한 과정에 대한 예시적인 설명은 도 112-125에 대하여 이전에 이미 설명되었고 참조로 이에 결부된다. 상기 자동 선택 모드에서, 상기 소프트웨어는, 상기 3D 패치워크 빗장뼈에 가장 가깝게 일치하는 (즉, 상기 뼈 구조에 대한 윤곽 및 형상 유사성) 템플릿을 판별하기 위하여, 상기 다수의 빗장뼈 외상 판 템플릿의 치수 및 윤곽을 상기 3D 패치워크 빗장뼈에 비교한다.
상기 3D 패치워크 빗장뼈에 가장 가깝게 일치하는 상기 빗장뼈 외상 판 템플릿을 이용함으로써, 상기 소프트웨어는 상기 외상 판을 통한 고정 부위 위치의 수동 또는 자동 식별뿐만 아니라 이용될 고정 장치(예를 들어, 외과용 스크류드라이버)의 방향 및 길이 결정을 가능하게 한다. 자동 고정 부위 식별 모드에서, 상기 소프트웨어는, 신경 또는 근육 부착부위의 통로에 고정 홀이 배치되는 것을 피하기 위하여, 근육 및 부착 위치뿐만 아니라 신경 위치를 확인한다. 더욱이, 상기 소프트웨어는 상기 외상 판과 함께 사용될 고정 고정체(fastener)의 수동 또는 자동 선택을 가능하게 한다. 이러한 방식으로, 상기 소프트웨어는 상기 빗장뼈 뼈 골절 요소의 크기 및 형상, 상기 외상 판을 통하여 연장되는 상기 고정체 홀의 위치 및 방향, 및 상기 고정체(예를 들어, 나사)의 지오메트리를 고려하여, 자동으로 고정체를 선택하여 고정 강도를 증가시키고 빗장뼈 뼈 보전에 있어서 불필요한 절충을 피하고자 한다.
상기 빗장뼈 외상 판 템플릿, 상기 고정 홀 위치(들), 및 상기 고정 고정체의 선택 이후에, 상기 소프트웨어는 가상 뼈 판 배치를 수행한다. 이는 상기 3D 패치워크 빗장뼈 상에 상기 빗장뼈 외상 판 템플릿을 위치시키는 것 및 상기 3D 패치워크 빗장뼈의 외부 표면 윤곽에 매칭되도록 상기 빗장뼈 외상 판 템플릿을 수동으로 또는 자동으로 변형시키는 것을 포함하여, 가상 3D 환자-맞춤형 빗장뼈 외상 판을 크기, 길이, 및 윤곽 치수로 제작한다. 상기 소프트웨어는 상기 환자-맞춤형 빗장뼈 외상 판 치수를 로그하여, 신속하게 제작될 수 있는 탠저블 환자-맞춤형 빗장뼈 외상 판의 제작을 가능하게 하는 기계어로 이들 가상 치수를 변환한다.
상기 환자-맞춤형 빗장뼈 외상 판 치수를 이용함으로써, 상기 소프트웨어는 또한 절개 계획을 구성하기 위하여 상기 골절된 빗장뼈의 영역 내에서 상기 환자의 연조직, 혈관, 및 신경의 상기 위치 및 식별에 대한 인체 데이터를 수신한다. 상기 절개 계획은 수술-전이며, 상기 골절된 빗장뼈 뼈 구성 부분에 대한 액세스를 증가시키 반면 상기 수술 과정의 침입성을 감소시키는 하나 이상의 절개를 행하기 위한 수술용 접근을 제안함으로써, 회복 시간 및 부수적인 수술-후 외상을 잠재적으로 감소시킨다. 도 134는 상기 환자의 빗장뼈에 근육이 부착되는 위치를 나타내는 표면 채색을 갖는 3D 패치워크 빗장뼈를 도시한다. 따라서, 상기 3D 패치워크 빗장뼈를 따라 길이방향으로 연장되는 패턴화된 원은 고정 고정체의 위치에 해당하며, 이는 대개 근육 부착이 없는 위치에 배향된다.
상기 절개 계획이 구성된 이후에, 외과의는 상기 계획을 승인하기 이전에 임의의 수정을 가하기 위하여 상기 절개 계획을 검토한다. 상기 절개 계획의 승인 후, 상기 계획은 수술 중 수술용 가이던스 시스템에 보내질 수 있다. 마찬가지로, 상기 절개 계획은 상기 환자의 정상적인 빗장뼈를 시뮬레이션하기 위하여 서로에 대하여 장착된 상기 재건된 빗장뼈 뼈 요소의 형상을 추정하기 위하여 수술 전의 탠저블 빗장뼈 모델를 구성하기 위하여 이용될 수 있다. 이러한 탠저블 빗장뼈 모델은 상기 빗장뼈 외상 판의 적합성을 테스트하기 위하여 그리고 구부림을 통하여 수술 전에 상기 외과의에 의하여 의도될 수 있는 임의의 윤곽 수정을 행하기 위하여 이용될 수 있다. 양자택일적으로, 탠저블 빗장뼈 모델은 헐거운 형태로 되는 상기 빗장뼈 뼈 요소로 이루어질 수 있어서, 상기 빗장뼈 뼈 요소를 함께 유지하기 위하여 하나 이상의 상기 외상 판을 이에 장착할 필요가 있고, 따라서 상기 외과의로 하여금 상기 외상 판(들)의 적합성을 체외에서 테스트할 수 있도록 하며 또한 체외에서 상기 외상 판(들)에 임의의 수정을 가할 수 있도록 한다.
도 128 및 도 129를 참조하면, 상기 예시적인 환자-맞춤형 빗장뼈 외상 판(들)은 수술 중에 형광투시법을 이용하여 위치될 수 있다. 상기 예시적인 기술은 환자-맞춤형 빗장뼈 외상 판을 환자의 빗장뼈 또는 빗장뼈 뼈 구성 부분에 부착하는 것에 관하여 설명되지만, 상기 예시적인 프로세스는 비-환자-맞춤형 외상 판을 빗장뼈에 부착하는 것 및, 보다 일반적으로, 임의의 외상 판을 임의의 뼈 또는 골절된 뼈 구성 부분에 부착하는 것에도 동일하게 적용될 수 있음을 이해해야 한다.
도 128은 수술 중에 형광투시법을 이용하여 환자-맞춤형 외상 판을 위치시키기 위한 외상 판 배치 시스템의 일부로서 수반되는 다양한 단계를 묘사하는 프로세스 흐름을 나타내며, 이는 환자 위치 등록을 설정하기 위하여 기준 마커의 배치와 함께 사전 계획 데이터를 이용하는 것을 포함한다. 구체적으로, 상기 사전계획 데이터는 상기 외상 판 배치 시스템의 소프트웨어 패키지에 설치되며, 환자 기하학적 구조 뼈 및 조직 기하학, 각각의 외상 판의 위치, 상기 외상 판을 당해 뼈 또는 뼈 구성 부분에 장착하는 데에 이용되는 고정 장치의 유형 및 위치, 및 수술 위치 및 기술에 대한 기타 해당 정보 베어링을 포함할 수 있다. 형광투시법에 사용하기 위한 기준 마커는, 제한 없이, 광학적, 전자기적, IMU를 포함한다 (비록 광학 마커는 도 128의 프로세스 흐름도에 참조되나, 이는 상기 환자의 해부학적 랜드마크에 대하여 알려진 위치에 위치되는 것이다). 상기 기준 마커 및 상기 환자의 알려진 해부학적 위치 및 치수를 이용함으로써, 상기 외상 판 배치 시스템은 상기 환자를 수술 전의 좌표계에 등록한다. 그 후, 상기 기준 마커는 공간에서 추적되어 상기 외상 판 배치 시스템으로부터의 피드백이 상기 외과의에게 제공되고, 참조용의 고정된 환자 프레임에 대하여 하나 이상의 절개 위치를 나타내는 상기 수술-전 계획에 일치한다. 상기 외상 판 배치 시스템의 일부로 이용가능한 예시적인 피드백 시스템은, 제한 없이, 상기 환자의 표면 상에 투사되는 시각적 디스플레이를 포함하며, 이는 각각의 절개의 위치 및 길이에 대해 윤곽을 나타낸다.
상기 빗장뼈가 별개의 뼈 구성 부분으로 이루어지는 골절된 빗장뼈의 맥락에서, 상기 외상 판 배치 시스템은 또한 상기 뼈 요소의 어셈블리의 순서를 나타내기 위하여 다수의 빗장뼈 뼈 요소에 식별 표시를 시각적으로 디스플레이할 수 있다. 예시적인 형태에서, 상기 시각적 디스플레이는 가시적인 각각의 뼈 요소에 디스플레이되는 유색의 숫자를 포함한다. 상기 유색의 숫자는 서로에 대하여 상기 뼈 요소의 방향 및 위치에 따라 색이 바뀐다. 예시적인 형태에서, 제 1 뼈 요소는 디스플레이된 숫자 "1"로 식별되며, 이는 상기 외부 표면에 투영된다. 상기 뼈의 방향 및 위치에 따라, 상기 디스플레이된 숫자 "1"는 적색, 황색 또는 녹색으로 될 수 있다. 적색 숫자는 상기 방향 및 위치가 부정확함을 나타낸다. 움직임에 따라, 상기 외과의가 상기 뼈 요소를 정확한 방향으로 이동하여 상기 수술-전 계획에 일치하는 배치를 달성하면, 상기 표시는 황색으로 변한다. 계속되는 움직임에 따라, 상기 숫자는 적절한 위치가 달성될 때 녹색으로 변한다. 이러한 재위치 프로세스는 각각의 상기 빗장뼈 뼈 요소에 대하여 반복된다.
상기 골절된 뼈 요소의 위치 및 방향에 대하여 이러한 시각적 피드백을 외과의에게 제공하기 위하여, 상기 외상 판 배치 시스템은 상기 뼈 위치 및 방향이 상기 수술-전 계획에 일치하는지를 판별하기 위하여 3D 공간에서 상기 뼈 요소를 추적하기 위하여 형광투시법을 이용한다. 상기 뼈 요소의 정확한 위치 및 방향에 관하여, 투영된 디스플레이를 통하여, 상기 외과의에게 실시간으로 업데이트된 정보를 제공하기 위하여, 상기 뼈 요소는, 뼈 요소의 추적에 앞서, 수술-전 데이터를 이용하여 등록된다. 각각의 뼈 조각이 추적되어 결국 상기 빗장뼈 외상 판에 장착됨에 따라, 상기 시스템은 상기 판 방향 및 위치뿐만 아니라 상기 고정 장치(예를 들어, 나사) 및 뼈 요소의 방향 및 위치를 확인하기 위하여 형광투시법의 영상을 이용하여 상기 외상 판 배치의 진행을 확인한다. 최종적으로, 상기 뼈 요소가 하나 이상의 빗장뼈 외상 판을 통하여 서로 결합될 때, 상기 시스템은 상기 과정이 상기 수술 전의 계획의 목적에 부합되는지 그리고 종료될 수 있는지를 상기 외과의에게 나타내는 최종 표시를 디스플레이한다.
도 130은 수술 중에 형광투시법 대신으로 초음파를 이용하여 환자-맞춤형 외상 판을 위치시키기 위한 외상 판 배치 시스템의 일부로서 수반되는 다양한 단계의 프로세스 흐름을 나타낸다. 도 128에 대한 앞서의 설명은, 상기 시스템이 형광투시법 대신으로 초음파를 이용하여 뼈 요소, 외상 판(들), 및 고정 장치를 추적하는 것을 제외하고는, 참조로서 이에 결부된 도 130에 대한 것과 유사하다. 따라서, 간결성을 도모하기 위하여 반복적인 설명은 생략한다.
외상 판 배치 가이드의 제작
도 150을 참조하여, 환자-맞춤형인 외상 판 배치 가이드를 제작하기 위하여 예시적인 과정 및 시스템을 설명한다. 당업자는 뼈가 골절되어 뼈 파편이 하나 이상의 위치에 서로 분리된다는 것을 알고 있다. 상기 뼈를 복원하기 위한 재건 수술의 일부로서, 이들 파편을 하나 이상의 외상 판을 이용하여 이들 파편을 고정된 방향으로 유지한다. 재건 외과 전문의는 환자-맞춤형 인체 사실 보다는 타고난 지식을 이용하여 상기 뼈를 다시 합치고자 하였다. 따라서, 환자 뼈 인체가 정상에서 변화된 만큼 상기 뼈 파편이 심하게 왜곡되었거나 또는 뼈 파편의 수가 너무 많아서, 외과 전문의는 종래기술의 외상 판을 사용함으로써 그리고 상기 플레이트의 형상을 상기 뼈 파편에 매칭하기보다는 상기 뼈 파편을 상기 플레이트의 형상에 매칭시킴으로써 상기 뼈 파편을 재분류하고자 하였다. 본 과정 및 시스템은 본래의 뼈 형상 및 방향을 복제하도록 뼈에 외상 판을 매칭하는 맞춤형 외상 판 및 외상 판 배치 가이드의 제작에 의하여 종래기술의 외상판 적용을 개선한다.
상기 예시적인 시스템 흐름은 골절된 인체를 나타내는 입력 데이터를 수신하는 것으로 시작된다. 단지 설명의 목적 상, 상기 골절된 인체는 인간의 두개골로 이루어진다. 상기 전술한 바의 과정 및 시스템은, 제한 없이, 팔, 다리, 및 몸통에서의 뼈를 포함하는 기타 인체/뼈에도 동일하게 적용 가능함을 주지해야 한다. 예시적인 형태에서, 인체 데이터 입력은 X-선, CT 스캔, MRI, 또는 뼈 크기 및 형상을 나타낼 수 있는 기타 임의의 영상화 데이터의 형태로 될 수 있다.
상기 입력된 인체 데이터는 상기 골절된 인체의 3차원적 가상 모델을 구성하는 데에 이용된다. 예를 들어, 상기 입력된 인체 데이터는 골절된 두개골의 컴퓨터 단층촬영 스캔으로 이루어지며, 이는 이러한 스캔을 분할하기 위하여 그리고 3차원 모델을 제작하기 위하여 소프트웨어로 처리된다. 당업자는 3차원적 가상 모델을 구성하기 위하여 컴퓨터 단층촬영을 어떻게 이용하는지에 대하여 익숙하다. 따라서, 상기 과정의 이러한 양상에 대한 상세한 설명은 간결성을 도모하기 위하여 생략한다.
상기 골절된 두개골의 3차원적 가상 모델 제작에 이어서, 상기 소프트웨어는 상기 3차원적 가상 모델에서 상기 두개골이 골절된 영역을 결정하기 위하여 상기 두개골의 3차원적 가상 모델을 스태티스티컬 아틀라스로부터의 데이터에 비교한다. 특히, 상기 소프트웨어는 골절 부위의 영역을 추출하기 위하여 상기 입력된 인체의 표면 모델로부터 추출된 특징을 이용한다(예: 표면 조도, 곡률, 형상 인덱스, 굽어짐, 이웃 연결성). 그리하여, 이들 골절 부위의 개괄적인 윤곽이 추출되고, 매칭 골절 부위를 발견하기 위하여 함께 매칭된다. 골절된 파편은 또한, 정상적인 인체를 재건하기 위하여, 상기 매칭된 골절 부위에 배치되기 위한 최상의 위치를 나타내는 아틀라스와도 매칭된다.
상기 소프트웨어가 상기 골절된 두개골에 대하여 재건된 3차원적 가상 모델을 제작한 후, 상기 재건된 3차원적 가상 두개골 모델의 외부에 부벽을 수동을 및/또는 자동으로 위치시킬 수 있다. 상기 부벽의 자동 배치는 상기 뼈 파편의 안정성을 최대화하는 반면, 부벽의 수를 최소화하기 위하여 프로그램된 로직의 결과이다. 여기에서 사용된 바, 부벽이라는 용어 및 그의 복수 표현은 뼈 파편을 서로에 대하여 고정하기 위하여 이용되는 임의의 지지수단을 칭한다. 일부 사례에서, 외과 전문의 또는 기타 교육된 사용자에 의한 실제적인 경험은 상기 수동 부벽 배치 특징을 이용할 때 상기 로직을 보충 또는 대체할 수 있다. 어느 경우이든, 일련의 부벽은 상기 소프트웨어 또는 상기 소프트웨어 사용자로 하여금 상이한 적용을 위하여 상이한 부벽을 선택할 수 있도록 하기 위하여 상기 소프트웨어에 프로그램된다. 동시에, 상기 부벽의 길이는 상기 골절 및 뼈 파편의 치수에 기초하여 수동으로 또는 자동으로 조절될 수 있다.
상기 재건된 3차원적 가상 두개골 모델에 부벽을 할당 및 배치함에 이어서, 각각의 부벽에 대한 상기 소프트웨어 치수 및 윤곽은 상기 소프트웨어에 의하여 기록된다. 이러한 기록은 각 부벽의 제작에 필요한 정보 또는 외과 전문의 또는 기타 교육받은 개인으로 하여금 기존의 부벽을 취할 있도록 하는 데에 최소한 도움이 될 만한 정보를 포함하며, 배치 가이드에 각각 일치한다. 기존의 부벽의 금형에 있어서, 상기 소프트웨어는 상기 재건된 3차원적 두개골 모델을 나타내는 하나 이상의 가시적인 모델을 제작하기 위한 컴퓨터 이용 설계(CAD) 명령어를 생성하기 위하여 상기 재건된 3차원적 가상 두개골 모델의 윤곽을 추출한다. 이들 CAD 명령어는 쾌속 조형기에 보내지고, 이는 상기 재건된 3차원적 두개골 모델을 나타내는 상기 하나 이상의 가시적인 모델을 제작한다. 가시적인 모델로서 적절한 인체 표면을 재현함으로써, 각각의 부벽은 상기 가시적인 모델에서 목표 위치로 적용될 수 있고 상기 환자의 두개골에 이식 및 고정되기 전에 수동으로 확인될 수 있다.
임의의 부벽의 위치 및 길이에 기초하여, 상기 소프트웨어는 또한 하나 이상의 환자-맞춤형 부벽 배치 가이드를 위한 윤곽 데이터를 생성하기 위하여 상기 재건된 3차원적 가상 두개골 모델의 윤곽을 추출한다. 특히, 배치 가이드는 각각의 부벽에 대하여 제작될 수 있다. 이러한 방식으로, 상기 배치 가이드는 단일의 방향으로 상기 환자의 두개골의 윤곽에 매칭되는 표면 윤곽을 포함한다. 상기 부벽의 위치가 상기 재건된 두개골의 가상 모델 상에서 확인됨을 고려하면, 이는 두개골 외표면에 인접한 윤곽이므로, 상기 소프트웨어는 가상 환자-맞춤형 배치 가이드를 생성하기 위하여 상기 2개를 조합한다. 이러한 가상 가이드는 제작을 위하여 쾌속 조형기에 CAD 명령어 형식으로 출력된다.
예시적인 본 실시 예에서, 상기 제작된 환자-맞춤형 배치 가이드는 외과 전문의가 잡을 수 있는 구조로 이루어진 길쭉한 핸들로 이루어진다. 상기 길쭉한 핸들의 단부로부터 연장되어 C-형상 윤곽 판 블록이 있다. 상기 윤곽 플레이트의 아래쪽은, 상기 부벽이 위치되어야 하는 위치에 상기 두개골의 볼록한 지형에 매칭되도록, 오목하게 된다. 필요한 것은 아니지만, 상기 윤곽 플레이트의 단부(또는 다른 부분)는 상기 부벽에 고정될 수 있고, 또는 상기 윤곽 플레이트가 단순히 작업 윈도를 제공할 수도 있으며, 이 작업 윈도우 내에서 상기 부벽은 상기 두개골에 정렬되어 궁극적으로 이에 고정된다. 상기 부벽을 상기 두개골에 부착한 후, 상기 윤곽 플레이트는 제거할 수 있다.
맞춤형 절단 & 배치 가이드, 판
도 151을 참조하면, 기형, 골절된, 또는 부분적인 인체의 재건은 의료인이 직면하는 복잡한 문제 중 하나이다. 비정상적인 인체는 출생 조건, 종양, 질병, 또는 개인 상해로부터 기인할 수 있다. 다양한 질병에 대하여 치료를 제공하는 것의 일부로서, 의료인은, 제한 없이, 파손되고/부서진 뼈, 뼈 변성, 정형외과용 임플란트 수정, 정형외과용 초기 이식, 및 질병을 포함할 수 있는 다양한 조건에 대하여 치료를 용이하게 하는 데에 인체를 재건하거나 또는 인체를 구성하는 것이 유익하다는 것을 알 수 있다.
본 개시는 뼈 이식편을 이용하여 뼈 및 생체조직 재건에 대한 시스템 및 방법을 제공한다. 이러한 재건을 수행하기 위하여, 상기 시스템 및 관련 방법은 다음의 2개 이상의 가상 3D 모델을 구성하기 위하여 환자의 현재 인체 영상을 이용한다: (a) 상기 현재의 비정상적인 인체를 나타내는 제 1의 3D 모델; 그리고, (2) 상기 환자의 재건된 인체를 나타내는 제 2의 3D 모델. 상기 환자의 비정상적인 인체 및 재건된 인체의 가상 모델에 도달하기 위한 환자 영상(X-선, CT 스캔, MRI 영상, 등)의 이용에 대한 상세한 설명에 대해서는 앞서의 "전체 인체 재건" 구간을 참조한다. 본 시스템 및 방법은 뼈 이식편을 취할 수 있는 하나 이상의 뼈(즉, 공여체 뼈)에 대한 3D 가상 모델을 구성함과 함께 상기 2개의 3D 가상 모델을 이용하기 위하여 상기 "전체 인체 재건" 구간에 설명된 상기 시스템에 기반한다. 아래에 더욱 상세히 설명되는 바와 같이, 상기 환자의 재건된 인체의 3D 가상 모델 및 비정상적인 인체의 3D 가상 모델은 재건에 필요한 상기 뼈 이식편의 3D 가상 모델을 제작하기 위하여 분석된다. 이러한 3D 가상 이식편 모델은 뼈 이식편을 절단해낼 수 있는 상기 공여체 뼈 상에서 하나 이상의 부위에 액세스하기 위하여 상기 공여체 뼈의 3D 가상 모델에 비교된다. 상기 절단 위치(들)을 결정한 후, 상기 이식된 뼈를 모으고 재건 부위에 상기 이식된 뼈들을 장착하기 위하여 절단 가이드 및 이식편 배치 가이드가 설계 및 제작된다.
예시적인 설명으로서, 본 시스템 및 방법은 복안에 대하여 설명되며, 여기에서 상기 공여체 뼈는 상기 종아리뼈로 이루어진다. 당업자는 본 시스템 및 방법을 하나 이상의 뼈 이식편을 이용하는 임의의 재건 수술 절차에 적용할 수 있음을 주지해야 한다. 더욱이, 복안 및 뼈 공여체로서의 종아리뼈에 대하여 논하지만, 당업자는 상기 예시적인 시스템 및 방법이 상기 종아리뼈가 아닌 다른 공여체 뼈와 함께도 이용될 수 있음을 이해해야 한다.
뼈 이식편을 이용하는 재건 수술계획 및 수술 절차와 함께 이용하기 위하여 상기 예시적인 시스템 및 방법을 논하기 위한 시작 단계로서, 상기 환자의 비정상적인 인체는 영상화되었고 상기 환자의 비정상적인 인체 3D 모델 및 재건된 인체 가상 3D 모델이 앞서 "전체 인체 재건" 구간에 설명된 과정에 따라 제작되었다고 가정한다. 따라서, 상기 환자의 비정상적인 인체 3D 모델 및 재건된 인체 가상 3D 모델 모두를 제작하기 위하여 환자 영상을 이용하는 것에 대한 상세한 설명은 간결성을 도모하기 위하여 생략한다.
상기 환자의 비정상적인 인체 및 재건된 인체에 대하여 가상의 3D 모델이 제작된 후, 상기 소프트웨어는 상기 인체를 비교하고 차이가 있는 영역을 하이라이트 표시한다. 특히, 상기 가상의 3D 모델 간에 공통적인 영역은 보유될 뼈를 나타내는 반면, 상이한 영역은 재건할 하나 이상의 영역을 나타낸다. 상기 소프트웨어는 상기 환자의 재건된 인체의 가상 3D 모델에서 공통적이지 않은 영역을 추출하고, 이들 영역을 상기 의도된 뼈 이식편의 분리된 3D 가상 모델로서 고립시킨다. 상기 외과 전문의 또는 기타 수술 전의 계획자는 상기 가상의 3D 뼈 이식편 모델을 검토할 수 있고 상기 뼈에 대하여 또는 상기 뼈 이식편을 최상으로 절단해낼 수 있는 뼈들에 대하여 그의 판단을 이용할 수 있다.
이식편 후보로서 가능한 뼈를 처음 선택하기 위하여 이용되는 로직에 상관없이, 상기 당해 뼈(들)은 종래의 양식(X-선, CT, MRI, 등)을 이용하여 영상화된다. 앞서의 "전체 인체 재건" 구간에 설명된 과정을 이용하여, 각각의 영상화된 뼈는 분할되고, 상기 영상화된 뼈에 대하여 가상의 3D 모델이 제작된다. 이러한 3D 공여체 뼈 모델은 공통적인 영역을 고립시키기 위하여 상기 가상의 3D 뼈 이식편 모델에 비교된다. 특히, 상기 소프트웨어는 공통적이거나 또는 유사한 곡률을 갖는 영역을 식별하기 위하여 상기 3D 공여체 뼈 모델의 표면 윤곽을 상기 가상의 3D 뼈 이식편 모델의 표면 윤곽에 비교한다. 공통적이거나 또는 유사한 영역이 없다고 가정하면, 상기 과정은 또 다른 공여체 뼈를 분석함으로써 재시작될 수 있다. 반대로, 상기 공여체 뼈에서 공통적이거나 또는 유사한 곡률을 갖는 하나 이상의 영역이 존재하면, 이들 영역이 상기 3D 공여체 뼈 모델 상에 하이라이트 표시된다. 특히, 상기 하이라이트 표시된 영역은 상기 가상의 3D 뼈 이식편 모델의 형상처럼 보인다. 상기 공통적인 영역이 상기 뼈 이식편을 잘라내기에 적절하다고 판단되면, 상기 재건의 일부로서 절단될 필요가 있을 수도 있는 상기 환자의 비정상적인 인체의 임의의 영역 및 잠재적 적합성을 검증하기 위하여, 상기 소프트웨어는 상기 뼈 이식편을 가상의 3D 모델로서 가상으로 잘라내고 상기 뼈 이식편(상기 공여체 뼈에 대하여 특이적/특유한 윤곽을 가짐)을 상기 환자의 비정상적인 인체의 가상의 3D 모델에 적용한다. 상기 절단 뼈의 가상 3D 모델을 상기 환자의 비정상적인 인체의 가상의 3D 모델에 적용하는 것이 덜 만족스러운 재건의 결과를 얻을 경우에는, 상기 뼈 선택 포인트에서 또는 뼈의 상이한 영역을 절단하기 위하여 상기 과정을 재시작할 수 있다. 그러나, 상기 절단 뼈의 가상의 3D 모델을 상기 환자의 비정상적인 인체의 가상의 3D 모델에 적용한 결과 적절한 맞춤이 얻어진다고 가정하면, 상기 뼈 이식편의 절제하는 것 및 상기 뼈 이식편을 상기 환자의 잔여 뼈에 장착하는 것을 용이하게 하기 위하여, 상기 시스템은 지그 설계로 전진된다.
예시적인 본 실시 예에서, 상기 시스템은 쾌속 조형기, CNC 공작기계, 또는 뼈 이식편 절단 가이드 및 뼈 이식편 배치 가이드를 제작하기 위한 유사한 장치에 필요한 기계어를 생성 및 출력한다. 상기 뼈 이식편 절단 가이드 및 뼈 이식편 배치 가이드를 제작하는 데에 필요한 출력을 생성하기 위하여, 상기 시스템은 상기 절단 뼈의 가상 3D 모델을 상기 환자의 비정상적인 인체의 가상 3D 모델에 이용한다.
특히, 상기 절단 뼈의 가상 3D 모델은 가상의 3D 절단 가이드의 경계를 정의한다. 더욱이, 이러한 예시적인 맥락에서, 상기 종아리뼈의 일부는 상기 뼈 이식편을 제공하기 위하여 절단되도록 계획된다. 상기 종아리뼈의 적절한 부위가 절단됨을 보장하기 위하여, 상기 가상의 3D 절단 가이드는 윈도우를 포함하며, 그 내부에서는 적절히 아우트라인 표시된 뼈 이식편을 제작하기 위하여 절단 장치(톱, 절단 드릴, 등)가 이동된다. 상기 가상의 3D 절단 가이드는 상기 적절히 아우트라인 표시된 뼈 이식편을 제작하기 위한 형상으로 되어야 할뿐만 아니라, 특정된 상기 환자의 공여체 뼈 상에 상기 절단 가이드의 배치를 보장하기 위한 형상으로 되어야 한다. 더욱 구체적으로, 상기 공여체 뼈 상에 상기 절단 가이드를 배치하는 것은 상기 절단 뼈가 상기 아우트라인 표시된 정확한 형상을 포함하고 또한 정확한 윤곽을 나타냄을 동시에 보장되어야 한다. 이러한 방식으로, 상기 가상의 3D 절단 가이드의 아래부분은 상기 절단 가이드가 장착될 상기 공여체 뼈의 표면에 대하여 "네거티브"로 설계된다. 상기 절단 가이드를 상기 공여체 뼈에 안착시키기 위한 예시적인 장착 기술에는, 제한 없이, 나사, 다우얼, 및 핀이 포함될 수 있다. 이들 장착 기술 또는 기타의 것들 중 하나 이상을 수용하기 위하여, 상기 가상의 3D 절단 가이드는 또한 내부에서 상기 수술 커터가 이동되는 상기 윈도우에 더하여 하나 이상의 관통 오리피스를 포함하도록 설계된다. 상기 가상의 3D 절단 가이드의 설계가 완성된 후, 상기 시스템은 쾌속 조형기, CNC 공작기계, 또는 상기 뼈 이식편 절단 가이드를 제작하기 위한 유사한 장치에 필요한 기계어를 생성 및 출력하며, 이는 실제 절단 가이드의 제작으로 이어진다.
상기 절단 가이드에 더하여, 상기 소프트웨어는 또한 하나 이상의 뼈 이식편 배치 가이드를 설계한다. 상기 뼈 이식편 배치 가이드는 환자-맞춤형이며, 상기 잔여 뼈에 대한 상기 뼈 이식편의 정확한 배치를 보장하기 위하여, 상기 환자의 인체에 일치한다(공여체 뼈 및 상기 공여체 뼈가 장착될 잔여 뼈 모두). 예시적인 형태에서, 상기 뼈 이식편 배치 가이드는 하악골 뼈 재건 절차를 위하여 구성된다. 설계 상기 뼈 이식편 배치 가이드를 설계하기 위하여, 상기 소프트웨어는 하이브리드 모델을 구성하기 위하여 상기 환자의 비정상적인 인체의 가상 3D 모델에 적용되는 상기 절단 뼈의 가상 3D 모델을 이용한다. 이러한 하이브리드 모델을 이용하여, 상기 뼈 이식편이 인접 잔여 뼈와 인터페이스될(그리고 뼈 성장을 통하여 바람직하게 연결될) 관절을 식별한다. 이들 관절에서, 외과 전문의 선호도와 같은 다양한 요인에 따라, 상기 시스템은 뼈 이식편 플레이트 위치를 식별하고, 각각의 판에 대하여, 상기 뼈 이식편 및 잔여 뼈에 대한 정확한 배치 및 안착을 위하여 하나 이상의 가이드를 식별한다.
맞춤형 외상 판
템플레이팅
및 배치 가이드
도 152를 참조하면, 외상 판 템플레이팅을 위한 예시적인 시스템 및 방법이 흐름도 형식으로 그래픽으로 도시된다. 컴퓨터 및 관련 소프트웨어를 포함하는 이러한 시스템 및 방법은 환자의 뼈 지오메트리에 매칭되도록 상기 외상판을 맞출 필요가 있을 수도 있는 미래 형상 변화를 줄이기 위하여 템플릿 외상 판 군 중에서 가장 잘 맞는 것을 결정하기 위하여 계산을 행한다. 예시적인 형태에서, 상기 시스템은 상기 환자의 골절된 뼈의 3D 모델을 통합된 뼈로서 구성하고 그리고나서 임플란트 이전에 상기 외상 판의 형상을 최종화하기 위하여 템플릿 외상 판을 상기 3D 모델에 형성하는 것을 포함한다. 이러한 방식으로, 상기 최종 외상 판 형상은 환자-맞춤형으로 되며, 상기 환자의 인체에 더욱 가깝게 맞춤될 수 있고, 상기 외상 판의 배치 위치에 있어서의 모호함을 제거하며, 수술 시간을 단축한다. 상기 시스템은 일상적인 임상 환경 또는 외과에서 쉽게 전개될 수 있다.
다시 도 152를 참조하면, 상기 시스템에 대한 초기입력은 골절된 뼈를 묘사하는 임의의 수의 의료 영상이다. 예를 들어, 이들 의료 영상은 X-선, 초음파, CT, 및 MRI 중 하나로 될 수 있다. 상기 골절된 뼈의 영상은 다수의 가능한 프로그램된 뼈 중에서, 어느 뼈가 골절된 것이지를 선택하기 위하여 사람 작업자에 의하여 분석된다. 상기 뼈 선택를 이용하여, 상기 소프트웨어는 상기 골절된 뼈 요소의 3D 모델을 형성하기 위하여 상기 의료 영상 데이터을 이용한다 (이에 참조로서 결부된 도 127 및 관련 설명에 미리 설명된 바와 같음). 이들 3D 뼈 모델은 그리하여 스태티스티컬 아틀라스로부터의 뼈 데이터를 이용하여 3D 패치워크 뼈 모델을 형성하기 위하여 축소된다 (즉, 통합된 비골절된 뼈일때, 서로 연결된 것처럼 상기 3D 뼈 모델을 배향 시키고 위치시키는 패치워크 뼈를 형성하기 위하여 재조립됨). 마찬가지로, 상기 스태티스티컬 아틀라스로부터의 뼈 데이터는 또한 당해 환자의 뼈에 대해 상기 재건된 뼈 모델로 호칭되는 완전한 3D 뼈 모델(비골절된)을 제작하기 위하여 상기 3D 패치워크 뼈 모델을 완전한 비골절된 뼈 모델에 모핑하도록 상기 3D 패치워크 뼈 모델 조합에 이용된다.
이러한 재건된 뼈 모델은, 외상 판 설계 파라미터를 추출하기 위하여, 길이방향 곡선(예를 들어, 정중선 곡선)을 상기 우세한 치수를 따라 추출하도록 상기 소프트웨어에 의하여 분석되고, 상기 소프트웨어는 또한 상기 우세한 치수에 수직으로 취한 단면 곡선을 추출한다. 이들 설계 파라미터로부터, 상기 소프트웨어는 다수의 템플릿 외상 판 중에서 상기 설계 파라미터에 가장 가깝게 닮은 것을 계산한다. 이들 설계 파라미터는 상기 외상 판의 길이, 상기 외상 판의 길이방향 곡률, 상기 길이방향 곡률에 수직인 외측 곡률, 외측 길이, 및 근육 부착부위 및 신경 위치와의 간섭을 최소화하는 뼈 고정체의 고정 위치를 포함하며 동시에 상기 골절된 뼈의 외상 판의 적절한 장착 및 보유를 보장할 수 있다.
상기 재건된 뼈 모델은 또한 탠저블 3D 뼈 모델을 제작하는 데에 이용된다. 예시적인 형태에서, 상기 소프트웨어는 상기 가상 재건된 뼈 모델을 기계어로서 출력하여, 애디티브법 또는 서브트랙티브법으로 상기 3D 뼈 모델의 쾌속 조형을 가능하게 하도록 프로그램된다. 본 개시의 목적을 위하여, 애디티브법은 상기 뼈 모델의 별개의 층 또는 슬라이스를 형성하기 위하여 재료의 추가에 의하여 빈 캔버스로부터 모델이 제작되는 3D 프린팅을 포함하며, 연속적인 층들을 프린팅함으로써 상기 뼈 모델의 별개의 층 또는 슬라이스는 서로 적층되어 상기 최종 뼈 모델을 형성한다. 반대로, 서브트랙티브법은 재료의 입체 블록으로 시작하는 것 및 입체 뼈 모델에 도달하기 위하여 재료를 가공해 없애도록 기계어(예를 들어, CNC 코드)를 이용하는 것을 포함한다. 당업자는 탠저블 뼈 모델을 제작하기 위하여 임의의 수의 프로세스가 이용될 수 있음을 이해할 것이다. 선택된 프로세스에 따라, 상기 소프트웨어는 쾌속 조형 및 상기 3D 뼈 모델의 구성을 용이하게 하기 위하여 상기 3D 가상 모델을 기계어로 변환하도록 프로그램된다.
3D 뼈 모델 구성 후, 상기 템플릿 외상 판은 상기 환자의 골절된 뼈에 가장 가깝게 일치하는 형상의 외상판에 대하여 상기 소프트웨어의 선택에 기초하여 구성, 가공, 또는 선택될 수 있다. 일단 입수되면, 상기 템플릿 외상 판은 상기 3D 뼈 모델에 맞춤되고, 상기 외상 판을 상기 3D 뼈 모델에 일치시키도록 수동으로 구부림하여 더욱 다듬어진다. 상기 외상 판과 뼈 모델 사이에 충분한 일치가 이루어진 후, 상기 외상 판은 환자-맞춤형으로 고려될 수 있고, 살균 후, 상기 환자에 임플란트될 준비가 된다.
환자-맞춤형 엉덩이
케이지
템플레이팅
및 배치 가이드
도 153을 참조하면, 엉덩이 케이지 템플레이팅 및 배치 가이드를 위한 예시적인 시스템 및 방법은 흐름도 형식으로 그래픽으로 도시된다. 이러한 시스템 및 방법는 컴퓨터 및 관련 소프트웨어를 포함하며, 환자의 뼈 지오메트리에 매칭되도록 상기 엉덩이 케이지를 맞출 필요가 있을 수도 있는 미래 형상 변화를 줄이기 위하여 템플릿 엉덩이 케이지 군 중에서 가장 잘 맞는 것을 결정하기 위하여 계산을 행한다. 예시적인 형태에서, 상기 시스템은 상기 환자의 엉덩이의 3D 모델을 (골절 또는 쇠퇴된 경우 통합된 뼈로서) 구성하고 그리고나서 임플란트 이전에 상기 엉덩이 케이지의 형상을 최종화하기 위하여 템플릿 엉덩이 케이지를 상기 3D 모델에 형성하는 것을 포함한다. 이러한 방식으로, 상기 최종 엉덩이 케이지 형상 및 부착 부위는 환자-맞춤형으로 되며, 상기 환자의 인체에 더욱 가깝게 맞춤될 수 있고, 상기 엉덩이 케이지의 배치 위치에 있어서의 모호함을 제거하며, 수술 시간을 단축한다. 상기 시스템은 일상적인 임상 환경 또는 외과에서 쉽게 전개될 수 있다.
다시 도 153을 참조하면, 상기 시스템에 대한 초기입력은 환자의 엉덩이(전체 또는 부분적인 골반)를 묘사하는 임의의 수의 의료 영상이다. 예를 들어, 이들 의료 영상은 X-선, 초음파, CT, 및 MRI 중 하나로 될 수 있다. 상기 엉덩이 뼈의 영상은 상기 환자의 엉덩이의 3D 가상 뼈 모델을 형성하기 위하여 상기 소프트웨어에 의하여 이용된다 (이에 참조로서 결부된 도 1 및 도 7 그리고 관련 설명에 미리 설명된 바와 같음). 이들 3D 뼈 모델은 그리하여 상기 소프트웨어에 의하여 자동으로 랜드마킹된다.
상기 소프트웨어는 상기 스태티스티컬 아틀라스로부터의 입력(예를 들어, 특정 랜드마크를 포함할 수도 있는 영역) 및 상기 스태티스티컬 아틀라스 내 엉덩이 뼈 모델에 비교하여 3D 뼈 모델에 대한 해부학적 랜드마크를 계산하기 위한 국소적 기하학적 분석을 이용한다. 이러한 계산은 각각의 랜드마크에 특이적이다. 상기 영역의 대략적인 형상은, 예를 들어, 알려져 있고, 검색할 상기 랜드마크의 위치는 상기 국소적 형상 특징에 대하여 알려져 있다. 예를 들어, 상기 관골구의 전측 입술형 돌기 홈(labral sulcus) 포인트의 상측 마진을 위치시키는 것은 상기 스태티스티컬 아틀라스 내 전측 입술형 돌기 홈(labral sulcus) 포인트의 상측 마진에 대한 대략적인 위치에 기초하여 검색을 리파인함으로써 달성된다. 이러한 프로세스는 각각의 당해 랜드마크에 대하여 반복된다.
상기 3D 뼈 모델에 대하여 상기 해부학적 랜드마크가 자동으로 계산된 후, 상기 뼈 모델은, 다수의 템플릿 엉덩이 케이지 중에서, 상기 해부학적 랜드마크에 가장 가깝게 맞는 것을 계산하기 위하여 상기 소프트웨어에 의하여 분석된다. 다수의 템플릿 엉덩이 케이지 중에서, 상기 환자의 엉덩이의 해부학적 랜드마크에 가장 가깝게 맞는 것을 계산하는 것에 더하여, 상기 소프트웨어는 또한 상기 케이지가 상기 환자의 인체에 장착될 위치를 계산한다. 관련 설명이 이에 참조로서 결합된 도 20 및 도 21을 다시 참조하면, 상기 소프트웨어는 상기 케이지가 상기 환자의 인체에 장착될 위치를 결정하도록 뿐만 아니라 수정 케이지에 대하여 탠저블 3D 배치 가이드를 구성하기에 충분한 기계어를 출력하기 위하여 이용될 수 있는 가상 3D 가이드를 제작하기 위하여 작동된다.
상기 환자의 엉덩이의 뼈 모델은 또한 탠저블 3D 뼈 모델을 제작하는 데에 이용된다. 예시적인 형태에서,
*상기 소프트웨어는 상기 가상 3D 뼈 모델을 기계어로서 출력하여, 애디티브법 또는 서브트랙티브법으로 상기 탠저블 3D 뼈 모델의 쾌속 조형을 가능하게 하도록 프로그램된다. 본 개시의 목적을 위하여, 애디티브법은 상기 뼈 모델의 별개의 층 또는 슬라이스를 형성하기 위하여 재료의 추가에 의하여 빈 캔버스로부터 모델이 제작되는 3D 프린팅을 포함하며, 연속적인 층들을 프린팅함으로써 상기 뼈 모델의 별개의 층 또는 슬라이스는 서로 적층되어 상기 최종 뼈 모델을 형성한다. 반대로, 서브트랙티브법은 재료의 입체 블록으로 시작하는 것 및 입체 뼈 모델에 도달하기 위하여 재료를 가공해 없애도록 기계어(예를 들어, CNC 코드)를 이용하는 것을 포함한다. 당업자는 탠저블 뼈 모델을 제작하기 위하여 임의의 수의 프로세스가 이용될 수 있음을 이해할 것이다. 선택된 프로세스에 따라, 상기 소프트웨어는 쾌속 조형 및 상기 3D 뼈 모델의 구성을 용이하게 하기 위하여 상기 3D 가상 모델을 기계어로 변환하도록 프로그램된다.
3D 뼈 모델 구성 후, 템플릿 케이지는 상기 환자의 엉덩이에 가장 가깝게 일치하는 형상의 케이지에 대하여 상기 소프트웨어의 선택에 기초하여 구성, 가공, 또는 선택될 수 있다. 일단 입수되면, 상기 템플릿 케이지는 상기 3D 뼈 모델에 맞춤되고, 상기 케이지를 상기 3D 뼈 모델에 일치시키도록 수동으로 구부림하여 더욱 다듬어진다. 상기 케이지과 뼈 모델 사이에 충분한 일치가 이루어진 후, 상기 케이지는 환자-맞춤형으로 고려될 수 있고, 살균 후, 상기 환자에 임플란트될 준비가 된다.
IMU
운동학적 추적
도 154를 참조하면, 컴퓨터 및 관련 소프트웨어를 이용하는 IMU를 이용한 뼈 및 연조직의 운동학적 추적에 대하여 예시적인 시스템 및 프로세스 개요가 도시된다. 예를 들어, 이러한 운동학적 추적은 사전수술계획에서 사용될 환자 운동학에 대하여 유용한 정보를 제공할 수 있다. 예시적인 설명으로, 본 시스템 및 방법은 추적 뼈 움직임을 추적하는 것과 뼈 및 연조직을 통합하는 3D 가상 모델로부터 초래되는 연조직 움직임을 구하는 것에 대하여 설명된다. 당업자는 본 시스템 및 방법이 임의의 뼈, 연조직, 또는 운동학적 추적 노력에 적용될 수 있음을 이해할 것이다. 더욱이, 상기 슬관절 또는 척추의 맥락에서 뼈 및 연조직의 운동학적 추적에 대하여 설명하지만, 당업자는 상기 예시적인 시스템 및 방법이 슬관절 이외의 관절 및 척추뼈 이외의 뼈에도 적용가능함을 이해해야 한다.
뼈 및 연조직 운동학적 추적과 함께 이용하기 위한 상기 예시적인 시스템 및 방법에 대한 설명의 서론으로서, 상기 환자의 인체(추적될)는 영상화되고(X-선, CT, MRI, 및 초음파를 포함하며 이에 제한되지 않음) 및 상기 환자의 인체의 가상 3D 모델은, 이에 참조로 이에 결합된, 이전의 "전체 인체 재건" 부분에서 설명된 프로세스에 따라 상기 소프트웨어에 의하여 발생된 것으로 가정한다. 결과적으로, 상기 환자의 인체의 가상 3D 모델을 제작하기 위하여 환자 영상을 이용하는 것에 대한 상세한 설명은 간결성을 도모하기 위하여 생략한다.
연조직(예를 들어, 인대, 힘줄, 등) 영상이 상기 영상화 양상에 기초하여 가용한 경우, 상기 환자의 인체의 가상 3D 모델을 형성하기 위하여 상기 뼈(들)이 분할될 때, 이들 영상 또한 상기 소프트웨어에 의하여 포함되고 분할된다. If 연조직 영상이 상기 영상화 양상으로부터 가용하지 않을 경우, 상기 뼈의 3D 가상 모델은 환자-맞춤형 연조직 추가 프로세스로 이동된다. 특히, 스태티스티컬 아틀라스는 상기 3D 뼈 모델의 각각의 뼈 형상에 대하여 연조직 위치를 추정하기 위하여 이용될 수 있다.
상기 3D 뼈 모델(연조직이 상기 모델의 일부이든 아니든)은 상기 소프트웨어에 의하여 수행되는 자동 랜드마킹 프로세스에 처리된다. 상기 자동 랜드마킹 프로세스는 상기 스태티스티컬 아틀라스로부터의 입력(예를 들어, 특정 랜드마크를 포함하기 쉬운 영역) 및, 앞서 설명된 바와 같이, 상기 스태티스티컬 아틀라스 내 각각의 인체의 경우에 대한 해부학적 랜드마크를 분석하기 위한 국소적 기하학적 분석을 이용한다. 상기 3D 뼈 모델에 연조직이 없는 경우, 상기 3D 뼈 모델에 대하여 상기 소프트웨어에 의하여 계산된 상기 해부학적 랜드마크는 연조직이 가장 있을 법한 위치뿐만 아니라 상기 연조직의 가장 있을 법한 치수를 제공하기 위하여 이용되며, 이들은 모두 유사-환자-맞춤형 3D 뼈 및 연조직 모델을 제작하기 위한 3D 뼈 모델에 결합된다. 어느 경우이든, 상기 해부학적 랜드마크 및 상기 3D 뼈 및 연조직 모델은 상기 소프트웨어용 사용자 인터페이스(즉, 소프트웨어 인터페이스)를 이용함으로써 볼 수 있고 조작할 수 있다.
상기 소프트웨어 인터페이스는 상기 가상 뼈 및 연조직 모델로 이루어지는 상기 환자의 뼈 및 연조직의 상대적인 동적 위치에 관하여 사용자에게 정보를 제공하기 위한 시각적 디스플레이에 통신 결합된다. 상기 환자의 뼈 및 연조직이 재위치됨에 따라 실시간으로 업데이트되는 이러한 동적 시각적 정보를 제공하기 위하여, 상기 소프트웨어 인터페이스는 임의의 수의 IMU(1002)에 통신 결합된다. 이들 IMU는 상기 가상 3D 모델의 뼈에 해당하는 하나 이상의 뼈에 단단히 고정되고 상기 뼈의 상대적인 회전을 추적한다. 예를 들어, 상기 뼈는 상기 슬관절의 맥락에서 경골 및 대퇴골로 이루어질 수 있고 또는 척추의 맥락에서 하나 이상의 척추뼈(예를 들어, 상기 LI 및 L5 척추뼈)로 이루어질 수 있다. 상기 뼈의 이동을 추적하기 위하여, 각각의 IMU가 장착된 뼈에 대하여 상기 각각의 IMU의 위치를 등록하기 위하여 추가의 추적 센서(예를 들면, 초-광대역)가 각각의 IMU(또는 단일의 장치의 일부분으로 결합됨)에 연합된다. 이러한 방식으로, 3D 공간에서 상기 추적 센서를 동적으로 추적함으로서 그리고 상기 IMUS에 대한 상기 추적 센서의 위치와 해당 뼈에 장착된 각각의 IMU의 위치를 알게 됨으로써, 상기 시스템은 초기에 상기 추적 센서의 동적 움직임을 상기 당해 뼈의 동적 위치에 상호연관 시킬 수 있다. 상기 IMU로부터 중요한 데이터를 구하기 위하여, 상기 환자의 뼈는 상기 가상 3D 뼈 및 연조직 모델에 대하여 등록되어야 한다. 이를 달성하기 위하여, 상기 환자의 관절 또는 뼈는 상기 가상 3D 뼈 모델의 위치에 해당하는 소정의 위치에 고정적으로 유지된다. 예를 들어, 상기 환자의 대퇴골 및 경골은 펼쳐져서 상기 아래쪽 다리가 상기 위쪽 다리에 일직선으로 되게 할 수 있고, 상기 3D 가상 뼈 모델은 또한 상기 대퇴골 및 경골이 길이방향으로 정렬된 위치를 구체화한다. 마찬가지로, 상기 환자의 대퇴골 및 경골은 서로 수직으로 배향되어 이 위치에 고정될 수 있고, 상기 3D 가상 뼈 및 연조직 모델은 서로 수직인 대퇴골 및 경골을 갖도록 배향된다. 상기 UWB 추적 센서를 이용하여, 상기 뼈의 서로에 대한 위치가 상기 IMU와 마찬가지로 상기 가상 3D 뼈 및 연조직 모델에 대하여 등록된다. 앞서의 개시에 의하면, 앞서 개시된 상기 예시적인 캘리브레이션 도구(1000)를 이용한 등록 이전에 상기 IMU는 캘리브레이션됨을 주지해야 한다.
예를 들어, 상기 3D 가상 뼈 및 연조직 모델이 상기 대퇴골, 경골, 및 상기 슬관절 관련 연조직을 포함하는 슬관적의 맥락에서, 상기 3D 가상 모델은 상기 대퇴골 및 경골이 공통의 축(즉, 공통 축 자세)을 따라 놓이는 위치를 취할 수 있다. 상기 환자를 이러한 공통 축 자세에 등록하기 위하여, 상기 환자는 상기 IMU 및 추적 센서(상기 경골 및 대퇴골에 단단히 고정됨)를 착용하고 상기 대퇴골 및 경골이 공통의 축을 따라 정렬되도록 펼쳐진 다리 위치를 취한다. 이러한 위치는 상기 소프트웨어 인터페이스가 상기 IMU 및 센서의 위치가 비교적 변함없음을 확인할 때까지 유지되며, 상기 소프트웨어 인터페이스의 사용자는 상기 등록 자세가 되었음을 나타낸다. 이러한 프로세스는 상기 IMU 및 추적 센서로 상기 3D 가상 모델을 등록하기 위하여 기타의 자세에 대해서도 반복될 수 있다. 당업자는 등록 자세의 수가 증가될수록 상기 등록의 정밀성이 대체로 증가된다는 것을 이해할 것이다.
도 175 및 도 176을 참조하면, 상기 3D 가상 모델이 척추의 특정 척추뼈를 포함하는 척추의 맥락에서, 상기 3D 가상 모델은 환자가 테이블에 편평히 눕거나 똑바로 서있는 경우 상기 척추뼈가 공통의 축(즉, 공통의 축 자세)을 따라 놓이는 위치를 취할 수 있다. 상기 환자를 이러한 공통의 축 자세에 등록하기 위하여, 상기 환자는 도 175에 도시된 바와 같이 상기 상기 LI 및 L5 척추뼈에 대한 위치에 단단히 고정된 상기 IMU(1002) 및 추적 센서를 착용하고 상기 3D 가상 모델의 중립 직립 척추 위치와 상호연관되는 중립 직립 척추 위치를 취한다.
이러한 위치는 상기 소프트웨어 인터페이스가 상기 IMU 및 센서의 위치가 비교적 변함없음을 확인할 때까지 유지되며, 상기 소프트웨어 인터페이스의 사용자는 상기 등록 자세가 되었음을 나타낸다. 이러한 프로세스는 상기 IMU 및 추적 센서로 상기 3D 가상 모델을 등록하기 위하여 기타의 자세에 대해서도 반복될 수 있다. 당업자는 등록 자세의 수가 증가될수록 상기 등록의 정밀성이 대체로 증가된다는 것을 이해할 것이다.
등록 후, 상기 환자 인체는 3D 공간에서 이동될 수 있고 상기 IMUs 및 추적 센서를 이용하여 동적으로 추적될 수 있으므로 상기 뼈 및 연조직의 이동이 상기 3D 가상 모델의 이동에 의하여 상기 시각적 디스플레이 상에 그래픽으로 나타나게 된다(상기 척추의 맥락에서 도 176 참조). 상기 환자가 움직이는 동안, 상기 소프트웨어는 상기 IMUs 및/또는 추적 센서로부터의 출력을 판독하고, 상기 시각적 디스플레이 상에 표시되는 3D 모델의 동적 그래픽 변화로 이들 출력을 변환하기 위하여 이들 출력을 처리한다 (예를 들어, 인대 길이, 관절 자세 및 관절형 표면 접촉 영역의 추적을 유지하면서). 도 177에 나타낸 바와 같이, 환자 인체(예를 들어, 뼈)를 추적하기 위하여 2개 이상의 IMU가 이용될 때, 상기 소프트웨어 인터페이스는 제 2 IMU에 대한 제 1 IMU의 상대적인 방향을 결정하며, 이는 상기 IMU의 자이로스코프, 가속도계, 및 자력계로부터의 입력에 기초하여 상기 IMU(1002)의 위치 변화를 계산하기 위하여 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법(SMC)을 이용하도록 프로그램된다고 앞서 설명된 바와 같다. 상기 SMC 방법에 대한 앞서의 설명은 이에 참조로 결합된다.
건강한 및 병적인 요추 환자의 움직임 프로파일은 크게 상이하여, 평면 움직임으로부터의 것이 병적인 환자에 대하여 더 높다. 구체적으로, 건강한 및 병적인 환자의 요추 움직임은 상기 환자로 하여금 3가지의 활동 - 축회전(AR), 외측 구부림(LB) 및 굴곡-신장(FE)을 수행하도록 함으로써 IMU을 이용하여 차별화될 수 있다. 상기 전술된 움직임 각각의 계수는 다음과 같이 계산된다:

여기에서, AM은 움직임(M) 동안 각도 움직임의 절대값의 총계를 나타낸다, 여기에서 C는 계산됨. 도 178는 듀얼 IMU을 이용하여 측정된 건강한 환자 대 병적인 환자의 반응을 나타낸다. IMU를 이용함으로써, 상기 예시적인 시스템은 보다 비용이 높고 침입형인 추적 시스템이 필요 없이도 환자 운동학적 분석 및 양적 평가를 가능하게 한다.
도 155 및 도 174는 상기 소프트웨어 인터페이스에 작동상 결합된 예시적인 시각적 디스플레이(즉, 사용자 인터페이스)를 나타낸다. 도 155에 예시적인 형태로 나타낸 바와 같이, 원위 대퇴골은 근위 경골(및 팬텀 근위경골로도 도시됨)과 인터페이스되는 것으로 도시된다. 상기 시각적 디스플레이는, 상기 환자의 아래쪽 다리가 상기 위쪽 다리에 대하여 재위치됨에 따라 상기 각각의 뼈의 위치가 실시간으로 어떻게 변화되는지를 보여주기 위하여, 상기 소프트웨어 인터페이스의 동적 업데이트를 반영한다. 도 174의 맥락에서, 상기 소프트웨어는 또한 운동학적 데이터에 기초하여 상기 근위 경골에 대한 예측된 설치 분포를 계산할 수 있다. 달리 말하자면, 슬관절의 맥락에서, 상기 소프트웨어는 상기 원위 대퇴골 및 근위 경골의 움직임을 추적하고, 상기 경골 표면의 특정 부분이 상기 슬관절의 다양한 움직임을 통하여 상기 원위 대퇴골에 의하여 수축되는 빈도를 기록한다. 상기 대퇴골 및 경골 영역간의 접촉 빈도에 기초하여, 상기 소프트웨어는 상기 접촉 분포를 반영하는 색상 그라데이션을 발생하도록 작동되어, 어두운 적색 영역은 가장 빈번하게 수축되는 반면 청색 영역은 가장 적게 수축되며, 적색과 청색 사이(주황색, 황색, 녹색, 및 아쿠아색을 포함)의 그림자 그라데이션으로 가장 많이 빈번한 접촉 영역과 가장 적게 빈번한 접촉 영역이 표시된다. 추가의 예로써, 상기 소프트웨어 인터페이스는 또한, 도 160-162에 나타낸 바와 같이, 다양한 움직임을 통하여 연조직 변형 및 추적 인체축의 위치를 하이라이트로 표현한다.
예를 들어, 도 156-158에 나타낸 바와 같이, 상기 소프트웨어는 상기 부착 부위를 계산하기 위하여 상기 스태티스티컬 뼈 아틀라스에 저장된 연조직 부착 부위의 위치를 이용하며, 상기 추적된 뼈(이 경우, 대퇴골 및 경골)의 운동학적 움직임에 기초하여, 가상 모델의 일부로서 연조직 데이터를 통합한다. 더욱 구체적으로, 상기 소프트웨어 인터페이스는 운동학적 데이터베이스 및 인체 데이터베이스(예를 들어, 스태티스티컬 뼈 아틀라스)에 통신 결합된다. 사전에 이미 상호 연관된(서로에 대하여 벼의 운동학적 움직임을 연조직 부착 부위의 위치로 링크하기 위하여) 상기 2개의 데이터베이스로부터의 데이터는 상기 소프트웨어로 하여금 인체 데이터 및 운동학적 데이터를 동시에 디스플레이할 수 있게 한다. 따라서, 상기 소프트웨어는, 도 159에 나타낸 바와 같이, 인대 구성 또는 재건 특징을 포함하도록 작동되어, 인대가 상기 뼈에 결합되어 도시될 수 있다. 마찬가지로, 상기 소프트웨어 인터페이스는, 도 160에 나타낸 바와 같이 시간이 경과됨에 따라 상기 환자의 뼈가 다양한 움직임을 통하여 이동됨에 따라 상기 인대가 동적으로 어떻게 스트레칭되는지를 나타내기 위하여, 상기 뼈 및 인대 모델의 움직임을 추적 및 기록한다. 이러한 다양한 움직임 데이터는 형광투시법에 비하여 더 선명한 영상을 제공하고 상기 환자로 하여금 유해한 방사선을 피하게 한다.
도 164-172를 참조하면, 동적으로 움직이는 상기 3D 가상 뼈 및 연조직 모델의 시각적 표시는 진단 및 수술-전 계획을 수행하는 임상의에게 특별한 응용가능성을 갖는다. 예를 들어, 상기 임상의는 다양한 움직임에 걸쳐 상기 뼈 및 연조직의 움직임을 보기 위하여 슬관절에 대하여 상기 전위 테스트와 같은 다양한 테스트를 수행할 수 있다. 이러한 운동학적 추적 정보는, 예를 들어, 상기 운동학적 데이터로부터 구한 인대 길이를 침해할 수도 있는 절제 계획을 제한하기 위하여 수술 계획 인터페이스에 보내질 수 있다. 운동학적 데이터는 또한 다양한 무릎 테스트(예를 들어, 옥스퍼드 무릎 점수(Oxford knee score))의 실시간 수량화하는 것 또는 스태티스티컬 패턴 인식 또는 기계학습 기술을 이용하여 신규한 수량화된 무릎 점수 시스템의 제작하는 것에 이용될 수 있다. 요약하자면, 형광투시법과 같은 대안이 더욱 비용이 많이 들고 환자 건강에 더욱 해롭게 될 수 있을 때, 상기 임상의 테스트는 보다 정확한 수술-전 및 수술-후 평가에 이용될 수 있다.
도 173을 참조하면, 예시적인 IMU 홀스터가 도시된다. 상기 홀스터는 한 쌍의 래치 스트랩에 고정적으로 장착된다. 상기 래치 스트랩은 원위 대퇴골과 같은 당해 인체에 외접되도록 구성되고 당해 인체에 대하여 상기 홀스터의 중요한 재위치를 억제하기 위하여 단단히 매도록 된다. 상기 홀스터는 또한 IMU 패키지를 수용하는 크기로 된 IMU 패키지 웰(well)을 포함한다. 상기 IMU 패키지가 상기 웰 내에 위치될 때, 상기 웰은 재위치 가능한 로크가 상기 IMU 패키지의 대향 단부에 결합될 때 상기 홀스터에 대하여 상기 IMU 패키지의 중요한 움직임을 허용하지 않는 치수로 된다. 이러한 방식으로, 상기 IMU 패키지는 상기 로크를 조작함으로써 상기 홀스터에 고정되거나 또는 상기 홀스터로부터 이동될 수 있다.
예시적인 형태에서, 상기 IMU 패키지는 파워 온-오프 스위치에 더하여 적어도 하나의 IMU(1002) 및 관련 전원, IMU 프로세서, 및 무선 송신기를 포함한다. 이러한 방식으로, 상기 IMU 패키지는 환자의 뼈(들)를 추적하기 위하여 사용 중일 때에는 상기 홀스터에 결합될 수 있고 그리고 나서는 상기 홀스터로부터 제거될 수 있는 자립적인 아이템이다. 재사용 및 살균의 맥락에서, 상기 IMU 패키지는 재-사용이 의도된 반면, 상기 IMU 홀스터는 재사용되거나 또는 일회용으로 될 수 있다. 그럼에도 불구하고, 일부 경우, 상기 IMU 패키지를 일회용으로 하는 것이 더욱 경제적일 수도 있다.
수술-전 및 수술-후 평가에 더하여, 본 시스템 및 방법은 수술 중 평가에 대해서도 유용할 수 있다. 상기 환자-맞춤형 절제 계획에 있어서, 맞춤형 절단 가이드는 상기 계획 및 상기 환자 뼈 데이터로부터 제작된다.
TKA용
IMU를
이용한 수술용
네비게이션
도 179를 참조하면, 전체 무릎 관절성형술(TKA) 과정 수술용 네비게이션이 중에 경골 요소를 정확히 위치시키도록 하기 위하여 하나 이상의 관성 측정 장치(IMU)를 이용하는 대안적인 예시적인 시스템 및 프로세스가 도시된다. 상기 환자의 인체 및 적절한 임플란트 크기, 형상, 및 배치의 가상 템플릿에 도달하기 위하여 환자 영상(X-선, CT, MRI, 등에 무관하게)을 활용하고 분할 또는 등록을 수행하는 초기 단계는 도 87, 도 88 및 도 90-92을 참조하여 앞서 설명된 바와 유사하다. 다소 상이한 부분은 상기 가상 템플레이팅 모듈로부터의 다운스트림부분을 활용하는 모듈 및 프로세스이다.
상기 가상 템플레이팅 모듈로부터의 다운스트림은 초기화 모델 제작 모듈이다. 앞서 설명된 지그 제작 모듈과 마찬가지로, 이러한 모듈 또한 템플릿 데이터 및 관련된 계획 파라미터(즉, 환자-맞춤형 경골 임플란트의 형상 및 배치 및 상기 환자의 나머지 대퇴골에 대한 환자-맞춤형 대퇴골 임플란트의 형상 및 배치는 상기 환자의 나머지 경골에 관련하여 알려진다)를 수신한다. 이러한 환자-맞춤형 정보를 이용함으로써, 상기 초기화 모델 제작 모듈은 상기 환자의 고유의 원위 대퇴골에 대한 초기화 장치의 3D 가상 모델 및 상기 근위 경골에 대한 초기화 장치의 3D 가상 모델을 제작한다. 달리 말하자면, 상기 대퇴골 초기화 장치의 3D 모델은 상기 환자의 원위 대퇴골의 특정 해부학적 표면의 "네거티브"로서 제작되므로 상기 탠저블 초기화 장치는 정밀하게 상기 환자의 원위 대퇴골에 매칭된다. 마찬가지로, 상기 경골 초기화 장치의 3D 모델은 상기 환자의 근위 경골의 해부학적 표면의 "네거티브"로서 제작되므로 상기 탠저블 초기화 장치는 단일의 위치 및 단일의 방향으로만 정밀하게 상기 환자의 나머지 경골에 매칭된다. 이들 초기화 장치의 제작에 더하여, 상기 초기화 모델 제작 모듈은 또한 쾌속 조형기, CNC 공작기계, 또는 상기 탠저블 대퇴골 초기화 장치 및 경골 초기화 장치를 제작하기 위한 유사한 장치에 필요한 기계어를 출력한다. 적어도 하나의 IMU(1002)를 갖도록 구성된 수술용 네비게이션 도구에 장착되거나(동시에 형성되거나 또는 일체로 형성됨) 또는 이에 일체로 된다.
각각의 IMU(1002)는 방향 및 이동 데이터를 보고할 수 있고, TKA 과정 중에 상기 대퇴골 요소 및 상기 경골 요소를 배치하기 위하여 수술용 네비게이션을 보조하기 위하여 하나 이상의 수술용 공구에 결합된다(예를 들어, 이에 장착됨). 각각의 IMU(1002)는, 상기 소프트웨어로 하여금 상기 IMU의 현재 위치 및 방향을 계산할 수 있도록 하는 상대 속도 및 시간을 나타내는 상기 IMU로부터의 출력 데이터를 수신하는 소프트웨어 시스템에 통신 결합되거나(유선 또는 무선), 또는 아래에 더욱 상세히 설명되는 상기 수술기구의 위치 및 방향을 계산하고 전송하며, 상기 수술기구의 위치 및 방향은 상기 IMU에 관련된다. 이러한 예시적인 설명에서, 각각의 IMU(1002)는, 서로 수직인 3개의 방향(예를 들어, X, Y, Z 방향)에 대한 데이터를 출력하기 위하여 단일의 회로기판에 집적될 수 있거나 또는 하나 이상의 센서(예를 들면, 자이로스코프, 가속도계, 자력계)의 개별 기판으로 구성될 수 있는, 3개의 자이로스코프, 3개의 가속도계, 및 3개의 홀-효과 자력계를 포함한다(3 세트의 3-축 자이로스코프, 가속도계, 자력계). 이러한 방식으로, 각각의 IMU(1002)는 상기 3개의 자이로스코프, 3개의 가속도계, 및 3개의 홀-효과 자력계로부터 21 전압 또는 수 출력을 발생하도록 작동된다. 예시적인 형태에서, 각각의 IMU(1002)는, 3개의 가속도계, 3개의 자이로스코프 센서 및 3개의 자력계(LSM9DS, ST-마이크로일렉트로닉스)로 구성되는 집적 센싱 모듈 및 3개의 가속도계, 및 3개의 자력계(LSM303, ST-마이크로일렉트로닉스)로 구성되는 2개의 집적 센싱 모듈을 포함하는 센서 기판이 제공된, 센서 기판 및 프로세싱 기판을 포함한다. 특히, 상기 IMU(1002) 각각은 적어도 3개의 축: 피치(상 및 하), 요(좌측 및 우측) 및 롤(시계방향 또는 반-시계방향 회전)에 대하여 공간 내에서 회전 변화를 측정하는 각운동량 센서를 포함한다. 더욱 구체적으로, 자력계로 구성되는 각각의 집적 센싱 모듈은, 상기 인가된 자기장에 비례하는 전압을 출력하기 위하여 할당된 각각의 자력계와 함께, 상기 회로기판 상에서 상이한 위치에 위치되고, 또한, 3차원적 좌표계 내에서 상기 3개 방향 각각에 대하여 공간 내 포인트에서 자기장의 극성 방향을 감지한다. 예를 들어, 상기 제 1 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 1 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력하며, 상기 제 2 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 2 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력하고, 상기 제 3 자력계는 상기 인가된 자기장에 비례하는 전압을 출력하고 제 3 위치에서 상기 X-방향, Y-방향, 및 Z-방향에서의 자기장의 극성 방향을 출력한다. 이들 3 세트의 자력계를 이용함으로써, 국소 자기장 파동의 검출에 더하여 상기 IMU의 헤딩 방향을 결정할 수 있다. 각각의 자력계는 상기 자기장을 참조로서 이용하며 자북으로부터의 방향 편차를 결정한다. 그러나, 상기 국소 자기장 철계 또는 자성 물질에 의하여 왜곡될 수 있고, 이는 통상 하드 아이언(hard iron) 왜곡 및 연철 왜곡으로 칭한다. 연철 왜곡 예로는 탄소강, 스테인리스강, 등과 같이 낮은 투자율을 갖는 물질이 있다. 하드 아이언 왜곡은 영구 자석에 의하여 유발된다. 이들 왜곡은 비-획일적인 장을 발생시키고(도 캘리브레이션 1-3 참조), 이는 상기 자력계 출력을 처리하고 상기 헤딩 방향을 해결하는 데에 이용되는 알고리즘의 정확도에 영향을 미친다. 결과적으로, 아래에서 더욱 상세히 논의되는 바와 같이, 캘리브레이션 알고리즘은 상기 검출된 자기장에서 균일성을 회복하도록 상기 자력계를 캘리브레이션하기 위하여 이용된다. 각각의 IMU(1002)는, 제한 없이, CR2032 코인셀 배터리 및 200mAh 충전가능한 리튬 이온 배터리와 같은, 교체가능한 또는 충전가능한 에너지 저장장치에 의하여 전원공급될 수 있다.
IMU(1002) 내의 집적 센싱 모듈은 설정가능한 신호 조정 회로 및 상기 센서에 대한 숫자 출력을 생성할 수 있는 AD 변환기(ADC)를 포함할 수 있다. 상기 IMU(1002)는 전압 출력으로 센서를 이용할 수 있고, 외부 신호 조정 회로는 멀티채널 24 비트 아날로그-디지털 변환기(ADC)(ADS 1258, Texas instrument)의 입력 범위로 센서 출력을 조정하도록 구성된 오프셋 증폭기로 될 수 있다. 상기 IMU(1002)는 마이크로컨트롤러 및 무선 송신 모듈(CC2541, Texas instrument)을 포함하는 집적 프로세싱 모듈을 더욱 포함한다. 양자택일적으로, 상기 IMU(1002)는 별도의 저출력 마이크로컨트롤러(MSP430F2274, Texas instrument)를 프로세서로서 이용할 수 있고 통신을 위하여 콤팩트 무선 송신 모듈(A2500R24A, Anaren)을 이용할 수 있다. 상기 프로세서는 각각의 IMU(1002)의 일부로서 집적될 수 있고 또는 각각의 IMU로부터 별개로 될 수 있으나 이에 통신 결합된다. 이러한 프로세서 블루투스 호환성으로 될 수 있고, 상기 자이로스코프, 가속도계, 및 자력계에 대한 유선 또는 무선 통신뿐만 아니라, 상기 프로세서와 신호 수신기 사이의 유선 또는 무선 통신을 제공할 수 있다.
각각의 IMU(1002)는 신호 수신기에 통신 결합되며, 상기 신호 수신기는 다수의 IMU로부터 수신된 데이터를 처리하기 위하여 미리-결정된 장치 식별 번호를 이용한다. 상기 데이터 비율은 단일의 IMU에 대하여 대략 100 Hz이고 IMU가 상기 공유 네트워크에 더 많이 연결될수록 감소된다. 상기 신호 수신기의 소프트웨어는 실시간으로 상기 IMU(1002)로부터의 신호를 수신하고, 상기 수신된 IMU 데이터에 기초하여 상기 IMU의 현재 위치를 연속적으로 계산한다. 구체적으로, 상기 IMU로부터의 가속도 측정 출력은 상기 3개의 축 각각에서 상기 IMU의 현재 속도를 측정하기 위하여 시간에 대하여 통합된다. 상기 각각의 축에 대하여 계산된 속도는 상기 현재 위치를 계산하기 위하여 시간에 대하여 통합된다. 그러나, 유용한 위치 데이터를 구하기 위하여, 참조 프레임이 설정되어야 하며, 이는 각각의 IMU을 캘리브레이션하는 것을 포함한다.
수술용 네비게이션을 위하여 상기 IMU(1002)를 이용하기에 앞서, 상기 IMU는 앞서 설명되고 결과적으로 이에 참조로 결합된 캘리브레이션 개시에 따라 캘리브레이션된다. 더욱이, 각각의 IMU 프로세서는 상기 IMU의 자이로스코프, 가속도계, 및 자력계로부터의 입력에 기초하여 상기 IMU(1002)의 위치 변화를 계산하기 위하여 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법(SMC)을 이용하도록 프로그램된다.
캘리브레이션에 이어서, 도 179에 나타낸 바와 같이, 상기 IMU(1002)는 당해 인체에 등록될 수 있다. 이 경우, 상기 IMU는 상기 근위 경골 및 상기 원위 대퇴골에 등록된다. 상기 IMU(1002)를 상기 근위 경골에 등록하기 위하여, 제 1 IMU는 단일의 위치 및 방향으로만 상기 근위 경골의 일부의 외부에 매칭되는 내부 표면을 갖는 근위 경골 위치 도구에 장착된다. 이러한 고유의 위치 및 방향에 위치되면, 상기 근위 경골 위치 도구는, 예시적인 형태에서 외과용 스크류드라이버를 이용하여, 상기 근위 경골에 장착된다. 제 2 IMU는 회전 네비게이션 도구에 고정 장착되고, 이는 절제된 근위 경골의 상부에 위치된다. 상기 회전 네비게이션 도구가 상기 환자의 선단 절제 경골 상에 정확히 배향되고 회전 위치될 때, 상기 제 1 IMU에 대한 상기 제 2 IMU(1002)의 방향이 알려진다.
작업자는 상기 소프트웨어 시스템에게 상기 IMU가 상기 정확한 위치에 있음을 지시하고 그리하여 상기 소프트웨어는 상기 제 2 IMU의 위치를 설정하기 위하여 두 IMU로부터의 출력을 이용한다. 상기 제 2 IMU의 이러한 위치는 상기 수술 계획에 대하여 상기 회전 네비게이션 도구의 방향 및 회전 정렬이 정확한지를 결정하기 위하여 미리 결정된 수술 계획에 비교된다. 그렇다면, 상기 TKA의 영구적인 경골 요소의 차후의 정렬을 위하여 상기 근위 경골에 하나 이상의 홀을 드릴링하는 데에 상기 회전 네비게이션 도구가 이용된다. 상기 회전 정렬이 빗나갔다면, 상기 소프트웨어 및 시각적 디스플레이는 상기 근위 경골에 대하여 상기 네비게이션 도구의 적절한 수술용 네비게이션을 돕도록 상기 외과의에게 피드백을 제공한다.
예시적인 형태에서, 상기 소프트웨어 프로그램은 상기 환자의 근위 경골의 가상 모델 및 상기 회전 네비게이션 도구의 가상 모델(가상 템플레이팅 단계에 따라 이미 완성된 상기 환자의 경골의 가상 모델, 및 이용될 수 있는 상기 회전 네비게이션 도구에 대하여 상기 시스템에 미리 설치된 상기 특정 회전 네비게이션 도구의 가상 모델)을 디스플레이하는 외과의용 그래픽 사용자 인터페이스를 제공하며, 상기 외과의에게 위치 및 방향 정보를 제공하는 상기 그래픽 사용자 인터페이스를 통하여 경골 및 회전 네비게이션 도구의 방향을 실시간으로 업데이트한다. 그래픽 사용자 인터페이스를 이용하는 것 보다, 본 시스템은 상기 회전 네비게이션 도구가 정확히 배향되는지, 아니라면, 상기 수술-전 계획에 일치하게 상기 회전 네비게이션 도구를 정확히 배향하기 위하여 상기 회전 네비게이션 도구를 어느 방향(들)으로 재위치시켜야 하는 지를 상기 외과의에게 표시하는 인티케이터 라이트를 갖는 수술용 장치를 포함할 수 있다. 필요한 뼈 절단이 이루어진 후, 상기 IMU(1002)는 상기 수술용 톱으로부터 제거되어 리머에 단단히 고정되고 (상기 골수내관을 정확히 리밍하기 위하여), 그 후, 상기 삽입기 방향에 대하여 알려진 방향으로 대퇴골 스템 삽입기에 장착된다. 그 후 상기 스템 삽입기는 가속 피드백을 계속적으로 제공하도록 마련된 상기 IMU로써 상기 대퇴골 스템 임플란트를 상기 리밍된 골수내관 내에 배치하기 위하여 이용되며, 상기 소프트웨어는 상기 대퇴골 및 스템 삽입기의 위치를 실시간으로 계산하기 위하여 상기 가속 피드백을 이용하고, 상기 그래픽 사용자 인터페이스를 통하여 이러한 위치 데이터를 상기 외과의에게 디스플레이한다. 상기 회전 네비게이션 도구의 방향 및 위치가 달성된 후, 상기 외과의는 상기 TKA의 근위 경골 요소의 임플란트 준비로 상기 대퇴골 근위부에 하나 이상의 홀을 드릴링할 수 있다. 상기 TKA 중에 상기 원위 대퇴골 요소의 배치를 돕기 위하여 상기 소프트웨어 시스템과 함께, 유사한 등록 프로세스와 같이, IMU 세트 및 유사한 회전 네비게이션 도구를 사용할 수 있다.
당업자는 종래의 하악골 뼈 판에 익숙하며, 따라서, 하악골 뼈 판의 개략적인 설계에 대한 상세한 설명은 간결성을 도모하기 위하여 생략한다. 본 시스템 및 방법이 달성하는 것은, 종래의 시스템 및 방법과는 달리, 상기 환자-맞춤형 뼈 판 그리고 상기 잔여 뼈 및 상기 뼈 이식편 모두의 형상을 고려한 배치 가이드의 형성이다. 특히, 명시된(자동으로 또는 수동으로) 각각의 뼈 플레이트 위치에 대하여, 상기 시스템은 가상의 3D 뼈 플레이트 및 관련 배치 가이드를 설계하였다. 각각의 가상의 3D 뼈 플레이트 및 가이드 모델은, 각각의 가상의 3D 뼈 플레이트의 아래 부분 및 가이드 모델이 상기 아래에 놓이는 뼈에 대하여 네거티브인지, 상기 뼈 이식편 또는 상기 잔여 뼈로 이루어지는 지를 보장하기 위하여, 상기 하이브리드 3D 모델(뼈 이식편 및 환자 잔여 뼈를 재건된 위치에 포함)에 대하여 중첩된다. 이러한 방식으로, 상기 가상의 3D 뼈 플레이트 및 가이드 모델은 상기 뼈 플레이트의 적절한 배치 그리고 상기 뼈 판, 뼈 이식편, 및 잔여 뼈 사이의 해당 맞물림을 보장하기 위하여 함께 작업된다. 뼈 플레이트를 뼈 이식편 및 잔여 뼈에 안착시키기 위한 예시적인 장착 기술에는, 제한 없이, 나사, 다우얼, 및 핀이 포함될 수 있다. 이들 또는 기타 장착 기술 중 하나 이상을 수용하기 위하여, 각각의 가상의 3D 뼈 플레이트 및 배치 가이드는 하나 이상의 관통 오리피스를 포함한다. 각각의 가상의 3D 뼈 플레이트 및 가이드의 설계가 완성된 후, 상기 시스템은 각각의 3D 뼈 플레이트 및 가이드를 제작하기 위하여 쾌속 조형기, CNC 공작기계, 또는 유사한 장치에 필요한 기계 코드를 생성 및 출력하며, 이는 실제의 뼈 플레이트 및 가이드 제작으로 이어진다.
위의 설명 및 본 발명의 요약에 이어, 이에 설명된 상기 방법 및 장치는 본 발명의 예시적인 실시 예를 구성하는 것으로서 본 발명은 이러한 정밀한 실시 예에 한정되지 않으며, 이러한 실시 예에 대하여 특허 청구의 범위에 정의된 본 발명의 범위로부터 벗어나지 않도록 변경이 가능함을 당업자에게 명백하다. 또한, 본 발명은 상기 특허 청구의 범위에 의하여 정의되며, 여기에 기재된 상기 예시적인 실시 예를 설명하는 어떠한 제한 또는 요소도 그러한 제한 또는 요소가 명백히 언급되지 않는 한 청구항 요소의 해석에 포함되도록 의도된 것이 아니다. 마찬가지로, 본 발명은 상기 특허 청구의 범위에 의하여 정의되며 또한 본 발명 고유의 및/또는 예상치 못한 장점이 여기에 명시적으로 기재되지 않았을 수도 있으나 존재할 수 있으므로, 여기에 기재된 본 발명의 명시된 장점 또는 목적 중 어느 것 또는 모든 것이 특허 청구의 범위 내에 있도록 충족되어야 할 필요는 없다.
[청구범위]
[청구항 1]
1차 프로세서에 통신 결합된 신호 수신기로 이루어지는 수술용 네비게이션 시스템으로서, 상기 1차 프로세서는 수술용 공구에 장착된 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 순차적인 몬테 카를로 알고리즘을 이용하도록 프로그램되고, 상기 프로세서는 다수의 수술용 공구 각각에 대하여 특유한 도구 데이터를 저장하는 제 1 메모리 및 인체 특징의 3차원적 모델을 구성하기에 충분한 모델 데이터를 저장하는 제 2 메모리에 통신 결합되며, 상기 1차 프로세서는 상기 인체 특징에 대하여 상기 수술용 공구의 3차원적 위치에 대한 시각적 피드백을 제공하는 디스플레이에 통신 결합됨을 특징으로 하는 수술용 네비게이션 시스템.
[청구항 2]
청구항 1에 있어서:
데이터를 상기 1차 프로세서에 전송하기 위하여 제 1 온보드 프로세서 및 제 1 무선 송신기에 통신 결합된 참조 관성 측정 장치를 더욱 포함하고, 상기 참조 관성 측정 장치는 상기 인체 특징에 부착되도록 구성되며, 상기 제 1 온-보드 프로세서는 상기 참조 관성 측정 장치로부터의 데이터 전송을 상기 제 1 무선 송신기로 안내하고;
상기 수술용 공구에 장착된 상기 관성 측정 장치는 제 2 온-보드 프로세서 및 제 2 무선 송신기에 통신 결합된 유틸리티 관성 측정 장치로 이루어지고, 상기 제 2 온-보드 프로세서는 상기 다수의 수술용 공구 중 하나에 장착되도록 구성되며; 그리고,
상기 1차 프로세서는 상기 제 1 무선 송신기로부터의 데이터 및 상기 제 2 무선 송신기로부터의 데이터를 수신하도록 구성된 1차에 통신 결합됨을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 3]
청구항 2에 있어서, 상기 제 2 온-보드 프로세서는 상기 유틸리티 관성 측정 장치가 장착된 수술용 공구를 명시하는 상기 제 2 무선 송신기를 통하여 통신을 안내함을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 4]
전기의 청구항에 있어서:
상기 관성 측정 장치는 적어도 3개의 가속도계 및 3개의 자력계를 포함하며;
상기 적어도 3개의 가속도계 각각은 총 9개의 가속도계 데이터 스트림에 대하여 3개의 축에 관한 데이터를 출력하고;
상기 적어도 3개의 자력계 각각은 총 9개의 자력계 데이터 스트림에 대하여 3개의 축에 관한 데이터를 출력하고; 그리고
상기 1차 프로세서는 상기 수술용 공구에 장착된 상기 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 상기 9개의 가속도계 데이터 스트림 및 상기 9개의 자력계 데이터 스트림을 이용함을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 5]
청구항 2 또는 3 중 한 항에 있어서:
상기 제 2 메모리에 저장된 모델 데이터는 상기 인체 특징의 3차원적 가상 모델을 포함하며;
상기 제 1 메모리에 저장된 도구 데이터는 상기 다수의 수술용 공구의 3차원적 가상 모델을 포함하고;
상기 디스플레이는 상기 인체 특징의 3차원적 가상 모델을 디스플레이하고;
상기 디스플레이는 상기 수술용 공구의 3차원적 가상 모델을 디스플레이하고;
상기 1차 프로세서는 상기 인체 특징의 3차원적 가상 모델을 재위치 시키기 위하여 상기 참조 관성 측정 장치로부터의 데이터를 이용하도록 작동되고; 그리고,
상기 1차 프로세서는 상기 수술용 공구의 3차원적 가상 모델을 재위치 시키기 위하여 상기 유틸리티 관성 측정 장치로부터의 데이터를 이용하도록 작동됨을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 6]
상기 수술용 네비게이션 시스템 of 청구항 1에 있어서, 상기 1차 프로세서는 실시간으로 상기 인체 특징의 3차원적 가상 모델에 대하여 상기 수술용 공구의 3차원적 가상 모델을 재위치 시키기 위하여 상기 관성 측정 장치로부터의 데이터를 이용하도록 작동됨을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 7]
전기의 청구항 중 어느 한 항에 있어서, 상기 순차적인 몬테 카를로 알고리즘은 폰 미제스 피셔(von Mises-Fisher) 밀도 알고리즘 요소를 포함함을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 8]
전기의 청구항 중 어느 한 항에 있어서:
상기 제 1 메모리에 저장된 도구 데이터는 상기 수술용 공구의 엔드 이펙터와 상기 수술용 장치 상의 상기 관성 측정 장치 장착 위치 사이의 상대거리를 나타내는 위치 데이터를 포함하고; 그리고,
상기 수술용 공구는 리머, 위치된 컵, 임팩터, 드릴, 톱, 및 절단 가이드 중 적어도 하나를 포함함을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 9]
전기의 청구항 중 어느 한 항에 있어서:
상기 관성 측정 장치는 적어도 3개의 자력계를 포함하며; 그리고,
상기 디스플레이는 상기 수술용 공구에 결합된 것 또는 상기 1차 프로세서에 결합된 것 중 적어도 하나임을 특징으로 하는 상기 수술용 네비게이션 시스템.
[청구항 10]
자력계 및 가속도계를 포함하는 관성 측정 장치를 위한, 캘리브레이션 시스템으로서:
제 1 축을 따라 중간 플랫폼에 대하여 회전 재위치 가능한 1차 플랫폼;
상기 제 1 축에 대하여 수직인 제 2 축을 따라 상기 중간 플랫폼에 대하여 회전 재위치 가능하며, 관성 측정 장치에 장착되도록 구성된 리테이너를 포함하는 최종 플랫폼; 그리고,
상기 관성 측정 장치에 통신 결합되도록 구성된 프로세서 및 관련 소프트웨어로 이루어지며,
상기 소프트웨어는 상기 1차 플랫폼이 상기 중간 플랫폼에 대하여 회전되는 동안 및 상기 최종 플랫폼이 상기 중간 플랫폼에 대하여 회전되는 동안 상기 관성 측정 장치에 관련된 자력계로부터 출력된 데이터를 이용하도록 그리고 타원체에 유사한 데이터 세트를 기록하도록 작동되며, 상기 소프트웨어는 상기 데이터 세트에 구(球)를 맞추도록 그리고 국소 자기장에서 왜곡을 확인하기 위하여 자력계 정정 계산을 발생하도록 작동하여, 상기 자력계로부터의 미래 데이터 출력을 정상화함을 특징으로 하는, 자력계 및 가속도계를 포함하는 관성 측정 장치를 위한, 캘리브레이션 시스템.
[청구항 11]
청구항 10에 있어서, 상기 1차 플랫폼은 고정적인 것임을 특징으로 하는 상기 캘리브레이션 장치.
[청구항 12]
청구항 10 또는 11에 있어서, 상기 1차 플랫폼 상기 1차 플랫폼에 대하여 상기 중간 플랫폼의 회전을 유발하도록 구성되는 모터를 적어도 부분적으로 수용함을 특징으로 하는 상기 캘리브레이션 장치.
[청구항 13]
청구항 10-12에 있어서, 상기 소프트웨어는, 상기 가속도계로부터의 미래 데이터 출력을 정상화하기 위하여, 상기 관성 측정 장치가 제 1 정지 위치에 있는 동안 상기 관성 측정 장치에 관련된 가속도계로부터 출력된 제 1 데이터 세트를 이용하도록 작동되고 상기 제 1 정지 위치와 상이한 제 2 정지 위치에서 상기 가속도계로부터 출력된 제 2 데이터 세트를 이용하도록 작동됨을 특징으로 하는 상기 캘리브레이션 장치.
[청구항 14]
청구항 10-12에 있어서:
상기 제 1 정지 위치는 상기 중간 플랫폼에 대하여 제 1 고정 위치에 있는 상기 1차 플랫폼에 상응하고 및 상기 최종 플랫폼은 상기 중간 플랫폼에 대하여 제 2 고정 위치에 있고; 그리고
상기 제 2 정지 위치는 상기 중간 플랫폼에 대하여 제 3 고정 위치에 있는 상기 1차 플랫폼 중 적어도 하나에 상응하고 상기 최종 플랫폼은 상기 중간 플랫폼에 대하여 제 4 고정 위치에 있음을 특징으로 하는 상기 캘리브레이션 장치.
[청구항 15]
청구항 10-14 중 어느 한 항에 있어서, 상기 최종 플랫폼은 다수의 리테이너를 포함하며, 상기 다수의 리테이너 각각은 다수의 관성 측정 장치 중 적어도 하나에 장착되도록 구성됨을 특징으로 하는 상기 캘리브레이션 장치.
[청구항 16
자력계를 포함하는 관성 측정 장치를 캘리브레이션하기 위한 방법으로서:
상기 제 1 자력계로부터 미가공 국소 자기장 데이터를 동시에 수신하면서, 제 1 관성 측정 장치를 포함하는 제 1 관성 측정 장치를 제 1 회전축 및 제 2 회전축에 대하여 회전시키고, 상기 제 1 회전축은 상기 제 2 회전축에 대하여 수직임;
국소 자기장에서 왜곡을 계산하기 위하여 상기 미가공 국소 자기장 데이터에 획일적인 계산을 적용하고; 그리고,
다듬어진 국소 자기장 데이터를 제공하기 위하여 상기 국소 자기장에서 계산된 왜곡을 확인함으로써 상기 자력계로부터 수신된 상기 미가공 국소 자기장 데이터를 정상화하는 단계로 이루어지는, 자력계를 포함하는 관성 측정 장치를 캘리브레이션하기 위한 방법.
[청구항 17]
청구항 16에 있어서:
상기 제 1 관성 측정 장치는 제 1 가속도계를 포함하고;
상기 방법은:
상기 제 1 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 1의 3차원적 위치에, 고정적인 상기 제 1 관성 측정 장치를 유지하고;
상기 제 1 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 2의 3차원적 위치에, 고정적인 상기 제 1 관성 측정 장치를 유지하고, 상기 제 2의 3차원적 위치는 상기 제 1의 3차원적 위치와 상이함;
상기 제 1 가속도계가 고정적인 때에 제로 가속도를 반영하도록 상기 제 1 가속도계로부터 수신된 데이터를 정상화하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 18]
청구항 17에 있어서:
상기 제 1 관성 측정 장치는 제 2 가속도계를 포함하고;
상기 방법은:
상기 제 2 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 3의 3차원적 위치에, 상기 제 1 가속도계가 고정적인 채로 유지되는 바와 같이, 고정적인 상기 제 2 관성 측정 장치를 유지하고;
상기 제 2 가속도계로부터 미가공 가속도계 데이터를 동시에 수신하면서, 제 4의 3차원적 위치에, 상기 제 1 가속도계가 고정적인 채로 유지되는 바와 같이, 고정적인 상기 제 2 관성 측정 장치를 유지하고, 상기 제 4의 3차원적 위치는 상기 제 3의 3차원적 위치와 상이함;
상기 제 2 가속도계가 고정적인 때에 제로 가속도를 반영하도록 상기 제 2 가속도계로부터 수신된 데이터를 정상화하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 19]
청구항 16-18 중 어느 한 항에 있어서:
상기 미가공 국소 자기장 데이터는 3차원으로 타원체를 나타내며; 그리고,
상기 다듬어진 국소 자기장 데이터는 3차원으로 구를 나타냄을 특징으로 하는 방법.
[청구항 20]
청구항 16-19 중 어느 한 항에 있어서:
상기 획일적인 계산은 상기 미가공 국소 자기장 데이터에 구를 맞춤을 포함하며; 그리고,
상기 미가공 국소 자기장 데이터를 정상화하는 것은 다듬어진 국소 자기장 데이터를 제공하기 위하여 상기 미가공 국소 자기장 데이터로부터 상기 계산된 왜곡을 제하는 것을 포함함을 특징으로 하는 방법.
[청구항 21]
청구항 16-20 중 어느 한 항에 있어서, 그 자신의 제 1 가속도계를 갖는 제 2 관성 측정 장치를 더욱 포함함을 특징으로 하는 방법.
[청구항 22]
청구항 21에 있어서, 상기 제 2 관성 측정 장치는 그 자신의 제 1 가속도계를 가짐을 특징으로 하는 방법.
[청구항 23]
관성 측정 장치에 결합될 때 수술용 공구를 명시하는 방법으로서:
각각 고유의 인터페이스를 갖는 다수의 수술용 공구 중 하나에 관성 측정 장치를 장착하고; 그리고,
상기 고유 인터페이스 판독에 대응하는 상기 다수의 수술용 공구 중 하나를 명시하기 위하여, 상기 관성 측정 장치에 통신 결합된 프로세서에 신호를 전송하도록 상기 고유 인터페이스를 판독하는 단계로 이루어지는, 관성 측정 장치에 결합될 때 수술용 공구를 명시하는 방법.
[청구항 24]
청구항 23에 있어서:
상기 관성 측정 장치는 다수의 스위치에 작동상 결합되고;
상기 고유 인터페이스는 상기 다수의 스위치 중 적어도 하나를 결합하고; 그리고,
상기 고유 인터페이스 판독 단계는 상기 다수의 스위치 중 어느 것이 상기 고유 인터페이스에 결합될지에 대하여 상기 프로세서에 의하여 결정함을 포함함을 특징으로 하는 방법.
[청구항 25]
청구항 23 또는 24 중 한 항에 있어서:
상기 프로세서는 상기 관성 측정 장치에 결합되고; 그리고,
상기 프로세서 및 관성 측정 장치는 공통의 하우징에 수용됨을 특징으로 하는 방법.
[청구항 26]
청구항 23 또는 24 중 한 항에 있어서:
상기 프로세서는 상기 관성 측정 장치로부터 멀리 떨어져 있으며; 그리고,
상기 프로세서 및 관성 측정 장치는 공통의 하우징 내에 수용되지 않음을 특징으로 하는 방법.
[청구항 27]
수술용 네비게이션 수행방법으로서:
가속 데이터 및 자기 데이터를 발생하기 위하여 다수의 관성 측정 장치를 이용하고;
수술 위치 근처에 상기 다수의 관성 측정 장치를 캘리브레이션하고;
상기 다수의 관성 측정 장치로 이루어지는 제 1 및 제 2 관성 측정 장치의 상대 위치를 등록하고, 상대 위치 등록은 특정 위치 및 방향에서 환자의 인체에 고유하게 결합하는 등록 도구에 상기 제 1 관성 측정 장치를 장착함을 포함함, 상기 상대 위치 등록은 상기 환자에 상기 제 2 관성 측정 장치를 장착함을 포함함;
등록 후 상기 제 1 관성 측정 장치를 수술용 공구에 부착하고;
상기 환자의 인체와 관련된 수술 부위를 향하여 상기 수술용 공구 및 상기 제 1 관성 측정 장치를 재위치 시키고; 그리고,
적어도 하나의 상기 환자의 인체가 보이지 않거나 또는 상기 수술용 공구의 작동 단부가 보이지 않을 때 상기 수술용 공구의 위치 및 방향 중 적어도 하나에 대하여 시각적 피드백을 제공하는 단계로 이루어지는, 수술용 네비게이션 수행방법.
[청구항 28]
수술용 네비게이션 수행방법으로서:
가속 데이터 및 자기 데이터를 발생하기 위하여 다수의 관성 측정 장치를 이용하고;
수술 위치 근처에 상기 다수의 관성 측정 장치를 캘리브레이션하고;
상기 다수의 관성 측정 장치로 이루어지는 제 1 및 제 2 관성 측정 장치의 상대 위치를 등록하고, 여기에서 상대 위치 등록은 특정 위치 및 방향에서 환자의 인체에 고유하게 결합하는 등록 도구에 상기 제 1 관성 측정 장치를 장착함을 포함하고, 상기 상대 위치 등록은 상기 환자에 상기 제 2 관성 측정 장치를 장착함을 포함함;
등록 후 상기 제 1 관성 측정 장치를 수술용 공구에 부착하고;
상기 환자의 인체와 관련된 수술 부위를 향하여 상기 수술용 공구 및 상기 제 1 관성 측정 장치를 재위치 시키고; 그리고,
상기 수술용 공구가 점유할 수 있는 위치 허용범위 및 방향 허용범위 중 적어도 하나를 명시하는 소정의 수술 계획에 대하여 상기 수술용 공구의 위치 및 방향에 대하여 시각적 피드백을 제공하는 단계로 이루어지는, 수술용 네비게이션 수행방법.
[청구항 29]
특정 뼈에 대한 외상 판 제작방법으로서:
특정 뼈에 대한 다수의 3차원적 뼈 모델로 이루어지는 데이터베이스에 액세스하고;
상기 다수의 3차원적 뼈 모델 각각에 대하여 길이방향 윤곽 및 단면 윤곽 중 적어도 하나로 이루어지는 특징에 액세스하고, 상기 길이방향 윤곽은 상기 다수의 3차원적 뼈 모델의 우세한 치수를 따라 취함;
다수의 클러스터를 발생하기 위하여 상기 액세스된 특징에 기초하여 상기 다수의 3차원적 뼈 모델을 클러스터링하고, 상기 다수의 클러스터는 수치상으로 상기 다수의 3차원적 뼈 모델의 10 퍼센트 미만임; 그리고,
상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 단계로 이루어지는, 특정 뼈에 대한 외상 판 제작방법.
[청구항 30]
청구항 29에 있어서, 상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 것은 상기 특정 뼈에 대한 연조직 부착을 피하기 위하여 고정 위치 선택을 포함함을 특징으로 하는 방법.
[청구항 31]
청구항 29에 있어서, 상기 다수의 3차원적 뼈 모델은 적어도 하나의 공통성을 포함하며, 여기에서 상기 공통성은 성별, 민족성, 연령범위, 및 신장범위 중 적어도 하나로 이루어짐을 특징으로 하는 방법.
[청구항 32]
청구항 29에 있어서, 상기 다수의 클러스터 각각에 대하여 외상 판을 발생하는 것은 그 특정 클러스터에 평균 길이방향 윤곽 및 평균 단면 윤곽 중 적어도 하나를 결합시키는 것을 포함함을 특징으로 하는 방법.
[청구항 33]
특정 뼈에 대한 환자-맞춤형 외상 판 제작방법으로서:
손상 또는 쇠퇴된 특정 뼈에 대하여 환자-맞춤형 영상 데이터를 구하고;
상기 환자-맞춤형 영상 데이터를 이용하여 상기 특정 뼈가 없는 부분 및 상기 특정 뼈가 있는 부분 중 적어도 하나를 분석하고;
상기 환자-맞춤형 영상 데이터에서 보이지 않는 뼈를 포함하는 통합된 상태에서 상기 특정 뼈의 환자-맞춤형 가상 뼈 모델을 발생하고;
상기 환자-맞춤형 가상 뼈 모델의 윤곽에 액세스하고; 그리고,
상기 환자-맞춤형 가상 뼈 모델을 이용하여 환자-맞춤형 외상 판을 발생하는 것으로 이루어지는, 특정 뼈에 대한 환자-맞춤형 외상 판 제작방법.
[청구항 34]
관성 측정 장치를 이용하여 환자 인체의 움직임을 운동학적으로 추적하기 위한 방법으로서:
제 1 관성 측정 장치를 당해 환자의 제 1 인체 특징의 외부에 장착하고;
제 2 관성 측정 장치를 당해 환자의 제 2 인체 특징의 외부에 장착하고;
상기 제 1 관성 측정 장치를 이용하여 상기 당해 환자의 제 1 인체 특징의 가상 모델로 상기 환자의 제 1 인체 특징의 위치를 등록하고;
상기 제 2 관성 측정 장치를 이용하여 상기 당해 환자의 제 2 인체 특징의 가상 모델로 상기 환자의 제 2 인체 특징의 위치를 등록하고;
상기 제 1 관성 측정 장치를 이용하여 상기 환자의 제 1 인체 특징의 위치를 상기 제 1 인체 특징의 가상 모델과 동적으로 상관관계로 하고; 그리고,
상기 제 2 관성 측정 장치를 이용하여 상기 환자의 제 2 인체 특징의 위치를 상기 제 2 인체 특징의 가상 모델과 동적으로 상관관계로 하는 것으로 이루어지는, 관성 측정 장치를 이용하여 환자 인체의 움직임을 운동학적으로 추적하기 위한 방법.
[청구항 35]
1차 프로세서에 통신 결합된 신호 수신기로 이루어지는 수술용 네비게이션 시스템으로서, 상기 1차 프로세서는 수술용 공구에 장착된 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 순차적인 몬테 카를로 알고리즘을 이용하도록 프로그램되고, 상기 프로세서는 다수의 수술용 공구 각각에 대하여 특유한 도구 데이터를 저장하는 제 1 메모리 및 인체 특징의 3차원적 모델을 구성하기에 충분한 모델 데이터를 저장하는 제 2 메모리에 통신 결합되며, 상기 1차 프로세서는 상기 인체 특징에 대하여 상기 수술용 공구의 3차원적 위치에 대한 시각적 피드백을 제공하는 디스플레이에 통신 결합됨을 특징으로 하는 수술용 네비게이션 시스템.
[청구항 36]
수술용 네비게이션 준비 방법으로서:
환자의 뼈의 가상 3차원적(3-D) 모델을 제작하기 위하여 환자 영상 데이터를 이용하고;
상기 환자의 뼈의 가상 3-D 모델의 표면에 대한 네거티브를 포함하여 단일의 위치 및 방향으로만 상기 표면에 정밀하게 매칭되도록 하는 초기화 장치의 가상 3-D 모델을 제작하기 위하여 상기 환자의 뼈의 가상 3-D 모델을 이용하고; 그리고,
상기 초기화 장치의 가상 3-D 모델을 이용하여 탠저블 초기화 장치의 제작을 위한 기계어를 발생하는 단계로 이루어지는 수술용 네비게이션 준비 방법.
[청구항 37]
청구항 36에 있어서, 상기 환자의 뼈는 골반뼈, 경골, 및 대퇴골 중 적어도 하나임을 특징으로 하는 방법.
[청구항 38]
수술용 네비게이션 시스템으로서:
자이로스코프, 다수의 가속도계, 및 자력계를 갖는 제 1 관성 측정 장치(IMU);
상기 제 1 IMU에 통신 결합된 제어기, 상기 제어기는 다수의 수술기구에 대하여 미리 설치된 캐드(computer aided design) 모델 및 캐드 표면 모델 중 적어도 하나를 갖는 소프트웨어를 포함함;
자이로스코프, 다수의 가속도계, 및 자력계를 갖는 제 2 IMU; 그리고
상기 제 1 및 제 2 IMU에 통신 결합된 제 1 신호 수신기로 이루어지는 수술용 네비게이션 시스템.
[청구항 39]
청구항 38에 있어서, 상기 제 1 IMU는 적어도 3개의 자이로스코프, 적어도 3개의 가속도계, 및 적어도 3개의 자력계를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 40]
청구항 38에 있어서, 상기 제 1 IMU는 단일 회로기판 및 다중 회로기판 중 적어도 하나로 이루어짐을 특징으로 하는 상기 수술용 네비게이션.
[청구항 41]
청구항 38에 있어서, 상기 제 1 IMU는 상기 제 1 IMU의 위치 및 방향을 계산하기 위하여 작동됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 42]
청구항 38 내지 39 중 어느 한 항에 있어서, 상기 제 1 IMU는
서로 수직인 3개의 방향으로 위치 및 방향을 계산하기 위하여 상대 속도 및 시간을 출력하고, 및
상기 3개의 자이로스코프, 3개의 가속도계, 및 3개의 자력계로부터의 적어도 21개의 숫자 출력을 발생하도록 작동됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 43]
.청구항 42에 있어서, 상기 3개의 자이로스코프, 3개의 가속도계, 및 3개의 자력계는 집적 센서 기판의 제 1 센싱 모듈로 이루어지며, 상기 집적 센서 기판은 또한 각각 3개의 가속도계 및 3개의 자이로스코프로 이루어지는 제 2 및 제 3 센싱 모듈을 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 44]
청구항 38에 있어서, 상기 제 1 IMU는 적어도 3개의 축에 대하여 공간 내 회전 변화를 측정하기 위한 다수의 각운동량 센서를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 45]
청구항 39에 있어서, 상기 적어도 3개의 자력계 각각은 3차원적 좌표계 내 공간의 일 지점에 인가된 자기장에 비례하는 전압을 출력하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 46]
청구항 45에 있어서:
제 1의 상기 적어도 3개의 자력계는 X, Y, 및 Z 방향으로 제 1 위치에 인가된 자기장에 비례하는 전압을 출력하도록 구성되고;
제 2의 상기 적어도 3개의 자력계는 X, Y, 및 Z 방향으로 제 2 위치에 인가된 자기장에 비례하는 전압을 출력하도록 구성되고; 그리고
제 3의 상기 적어도 3개의 자력계는 X, Y, 및 Z 방향으로 제 3 위치에 인가된 자기장에 비례하는 전압을 출력하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 47]
청구항 45에 있어서,
상기 적어도 3개의 자력계 각각은 자북으로부터의 방향 편차를 결정하기 위한 참조로서 국소적 또는 환경적 자기장을 이용하고, 및
캘리브레이션 알고리즘은 자기장 왜곡을 확인하기 위하여 상기 적어도 3개의 자력계로부터의 전압 출력에 적용됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 48]
청구항 38에 있어서, 상기 제 1 IMU는 충전가능한 에너지 저장장치를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 49]
청구항 38에 있어서, 상기 제 1 IMU는 다수의 센싱 모듈을 포함하며, 이들 각각은 신호 조정 회로 및 아날로그-디지털 변환기에 통신 결합됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 50]
청구항 38에 있어서, 상기 제 1 IMU는 다수의 센싱 모듈을 포함하며, 이들 각각은 마이크로컨트롤러 및 무선 송신기에 통신 결합됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 51]
청구항 50에 있어서, 상기 마이크로컨트롤러는 블루투스 호환성임을 특징으로 하는 상기 수술용 네비게이션.
[청구항 52]
청구항 38에 있어서, 각각의 상기 제 1 및 제 2 IMU는 어느 IMU로부터 신호가 수신되는지를 식별하기 위하여 상기 제 1 신호 수신기에 의하여 이용되는 고유 식별 번호를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 53]
청구항 38에 있어서, 상기 제 1 신호 수신기는 상기 제 1 및 제 2 IMU로부터 실시간으로 신호를 수신함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 54]
청구항 53에 있어서, 상기 제 1 신호 수신기는 수신된 IMU 데이터를 이용하여 상기 제 1 및 제 2 IMU 각각의 위치를 연속적으로 계산함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 55]
청구항 38에 있어서, 상기 제 1 IMU는, 상이한 자력계가 극성 북의 방향에 대하여 상이한 데이터를 제공할 때, 추적 알고리즘의 자력계 데이터 이용을 일시적으로 불능화하도록 프로그램됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 56]
청구항 38에 있어서, 상기 제 1 IMU는 상기 제 1 IMU가 장착되는 수술기구를 명시하도록 프로그램됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 57]
청구항 56에 있어서, 상기 제 1 IMU는 상기 수술기구에 대한 고유의 표시를 이용하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 58]
청구항 57에 있어서, 상기 고유의 표시는 전기적 스위치 패턴 및 전기적 접촉 그리드 중 적어도 하나로 이루어짐을 특징으로 하는 상기 수술용 네비게이션.
[청구항 59]
청구항 38에 있어서, 상기 미리 설치된 캐드 모델 및 상기 캐드 표면 모델 중 적어도 하나는 상기 다수의 수술기구 각각의 외부 치수를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 60]
청구항 38에 있어서, 상기 미리 설치된 캐드 모델 및 상기 캐드 표면 모델 중 적어도 하나는 X-방향에서의 길이, Y-방향에서의 폭, 및 Z-방향에서의 높이를 포함하며, 상기 길이, 폭, 및 높이가 각각의 방향으로 어떻게 변화되는지를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 61]
청구항 38에 있어서, 상기 제어기는 상기 자이로스코프 및 상기 다수의 가속도계로부터의 데이터를 이용하도록 그리고 상기 제 1 IMU가 장착될 수술기구에 대하여 위치 및 방향 정보를 설정하도록 프로그램됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 62]
청구항 38에 있어서, 제 1 수술기구를 더욱 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 63]
청구항 38에 있어서, 상기 제 1 수술기구는 기타 다른 수술기구로부터 상기 제 1 수술기구를 식별하는 고유의 표시를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 64]
청구항 63에 있어서, 상기 고유의 표시는 전기적 스위치 패턴 및 전기적 접촉 그리드 중 적어도 하나로 이루어짐을 특징으로 하는 상기 수술용 네비게이션.
[청구항 65]
청구항 63에 있어서, 상기 제 1 수술기구는 단일의 방향 및 위치로만 상기 제 1 IMU를 장착하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 66]
청구항 38에 있어서, 상기 제 1 관성 측정 장치는 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법을 이용하도록 프로그램됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 67]
청구항 38에 있어서, 상기 자이로스코프 및 상기 다수의 가속도계는 제 1 자이로스코프 데이터 세트 및 다수의 가속 데이터 세트를 생성하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 68]
청구항 67에 있어서, 상기 제 1 자이로스코프 데이터 세트는 3개의 수직축에 대하여 확인됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 69]
청구항 67에 있어서, 상기 다수의 가속 데이터 세트는 3개의 수직축에 대하여 확인되며, 상기 다수의 가속 데이터 세트 각각은 상기 3개의 수직축의 분리를 확인함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 70]
청구항 38에 있어서, 상기 제 1 관성 측정 장치는 다수의 자기장 데이터 세트를 발생하도록 구성된 다수의 자력계를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 71]
청구항 70에 있어서, 상기 다수의 자기장 데이터는 3개의 수직축에 대하여 확인되며, 상기 다수의 자기장 데이터 세트 각각은 상기 3개의 수직축의 분리를 확인함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 72]
청구항 38에 있어서, 상기 제 1 관성 측정 장치는 자력계를 포함하며, 상기 제 1 관성 측정 장치는 X, Y, Z 축에 대한 제 1 자이로스코프 데이터 세트, X, Y, Z 축에 대한 제 1 가속 데이터 세트, 및 X, Y, Z 축에 대한 제 1 자기장 데이터 세트를 발생하도록 구성되고, 이들 데이터 세트는 위치 데이터를 발생하기 위하여 이용됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 73]
청구항 72에 있어서, 상기 수술용 네비게이션 시스템은 상기 제 1 자이로스코프 데이터 세트, 상기 제 1 가속 데이터 세트, 및 상기 제 1 자기장 데이터 세트를 이용하여 제 1 방향에 대하여 상기 폰 미제스 피셔 밀도의 미리-결정된 분산 인자로써 중립 위치 주위에 제 1의 N 입자 세트를 발생하도록 구성된 소프트웨어를 포함하며, 각각의 입자는 상기 위치 데이터를 발생하는 것의 일부로서 쿼터니언 형태로 상기 X, Y, Z 축 주위에서 방향을 나타냄을 특징으로 하는 상기 수술용 네비게이션.
[청구항 74]
청구항 73에 있어서, 상기 입자는 상기 동일한 확률 밀도 공간으로부터 이끌어낸 독립적이며 동일하게 분포된 확률변수 세트로 이루어짐을 특징으로 하는 상기 수술용 네비게이션.
[청구항 75]
청구항 73에 있어서, 상기 입자는 관찰된 방향의 통계적으로 이루어진 변화임을 특징으로 하는 상기 수술용 네비게이션.
[청구항 76]
청구항 73에 있어서, 상기 소프트웨어는 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트를 이용하여 상기 제 1 관성 측정 장치의 제 1 방향을 추정하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 77]
청구항 76에 있어서, 상기 제 1 방향을 추정하는 것은 상기 제 1 관성 측정 장치의 틸트를 아는 것을 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 78]
청구항 78에 있어서, 상기 틸트는 상기 제 1 가속 데이터 세트로부터 결정됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 79]
청구항 78에 있어서, 상기 소프트웨어는 상기 제 1 관성 측정 장치의 틸트를 이용하여 상기 제 1 자기장 데이터 세트를 수학적으로 정정하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 80]
청구항 76에 있어서, 상기 제 1 방향을 추정하는 것은 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트를 이용하여 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것을 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 81]
청구항 80에 있어서, 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것은 가우스 뉴턴(Gauss Newton) 최적화 방법을 이용함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 82]
청구항 80에 있어서, 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것은 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트로부터 틸트 및 헤딩 데이터의 오차의 허용 여유도 내에 있는 틸트 및 헤딩을 이용하여 방향을 반복적으로 결정하는 것을 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 83]
청구항 76에 있어서, 상기 소프트웨어는 상기 제 1 방향 추정을 이용하여 평균을 중심으로 상기 중립 위치에서 상기 제 1의 N 입자 세트를 회전시키도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 84]
청구항 76에 있어서, 상기 소프트웨어는 상기 제 1 자이로스코프 데이터 세트를 이용하여 시간에서 상기 제 1의 N 입자 세트를 순방향 추정하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 85]
청구항 84에 있어서, 상기 소프트웨어는 단 하나의 쿼터니언이 남을 때까지 상기 추정된 순방향 제 1의 N 입자 세트로부터 2개의 쿼터니언을 반복적으로 보간함으로써 상기 추정된 순방향 제 1의 N 입자 세트를 평균내도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 86]
청구항 73에 있어서, 상기 제 1 관성 측정 장치는 위치 데이터를 발생하는 데에 이용되는 X, Y, Z 축에 대한 제 2 자이로스코프 데이터 세트, X, Y, Z 축에 대한 제 2 가속 데이터 세트, 및 X, Y, Z 축에 대한 제 2 자기장 데이터 세트를 발생하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 87]
청구항 86에 있어서, 상기 소프트웨어는 상기 제 2 자이로스코프 데이터 세트, 상기 제 2 가속 데이터 세트, 및 상기 제 2 자기장 데이터 세트를 이용하여 제 2 방향에 대하여 상기 폰 미제스 피셔 밀도의 미리-결정된 분산 인자로써 중립 위치 주위에 제 2의 N 입자 세트를 발생하도록 구성되고, 각각의 입자는 상기 위치 데이터를 발생하는 것의 일부로서 쿼터니언 형태로 상기 X, Y, Z 축 주위에서 방향을 나타냄을 특징으로 하는 상기 수술용 네비게이션.
[청구항 88]
청구항 87에 있어서, 상기 소프트웨어는 상기 제 1 관성 측정 장치의 제 2 방향을 상기 제 1 방향에 비교하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 89]
청구항 8에 있어서, 상기 비교는 제 2 상태로부터의 상기 제 2의 N 입자 세트를, 제 1 상태로부터 시간에서 상기 제 1의 N 입자 세트를 순방향 추정하는 것으로부터의 상기 제 1의 N 입자 세트와 비교하는 것을 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 90]
청구항 89에 있어서, 상기 비교는 상기 순방향 추정 작동으로 인한 상기 제 1의 N 입자 세트에 가장 가까운 상기 제 2의 N 입자 세트에 더욱 크게 가중되는 가중 정확도를 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 91]
청구항 90에 있어서, 상기 비교는 상기 제 2의 N 입자 세트로부터 작은 가중치 입자를 배제하는 것 포함함을 특징으로 하는 상기 수술용 네비게이션.
[청구항 92]
청구항 87에 있어서, 상기 소프트웨어는 중립 위치 주위에서 후속의 N 입자 세트의 발생을 반복하도록 구성되고 그리고, 현재 관찰된 방향을 즉각적인 방향성 예측에 기초한 방향의 계산과 비교하기 위하여, 이전 상태에서 시간에서 이전의 N 입자 세트를 순방향 추정함으로부터의 이전의 N 입자 세트에 후속 상태로부터의 후속의 N 입자 세트를 비교하도록 구성됨을 특징으로 하는 상기 수술용 네비게이션.
[청구항 93]
하나 이상의 관성 측정 장치를 캘리브레이션하는 방법으로서:
제 1 관성 측정 장치(IMU)의 사용 목적 위치에 근접한 3차원적 좌표계 내 제 1 위치에서 상기 제 1 IMU가 고정적인 동안 상기 제 1 IMU로부터 제 1 판독을 수집하고;
제 1 관성 측정 장치(IMU)의 사용 목적 위치에 근접한 3차원적 좌표계 내 제 2 위치에서 상기 제 1 IMU가 고정적인 동안 상기 제 1 IMU로부터 제 2 판독을 수집하고; 그리고,
상기 제 1 IMU로 이루어지는 다수의 가속도계 각각에 대하여 0점을 설정하는 단계로 이루어지는 하나 이상의 관성 측정 장치를 캘리브레이션하는 방법.
[청구항 94]
청구항 93에 있어서, 상기 제 1 판독은 상기 제 1 IMU의 다수의 가속도계 각각으로부터의 다수의 제 1 판독으로 이루어짐을 특징으로 하는 방법.
[청구항 95]
청구항 94에 있어서, 상기 다수의 제 1 판독은 상기 제 1 IMU의 다수의 가속도계 각각에 대하여 가속도계-특이성 기반에 기록됨을 특징으로 하는 방법.
[청구항 96]
청구항 93에 있어서, 상기 제 2 판독은 상기 제 1 IMU의 다수의 가속도계 각각으로부터의 다수의 제 2 판독으로 이루어짐을 특징으로 하는 방법.
[청구항 97]
청구항 96에 있어서, 상기 다수의 제 2 판독은 상기 제 1 IMU의 다수의 가속도계 각각에 대하여 가속도계-특이성 기반에 기록됨을 특징으로 하는 방법.
[청구항 98]
청구항 93에 있어서, 작용 중인 자기장에서 왜곡을 판별하기 위하여, 상기 제 1 관성 측정 장치(IMU) 사용 목적 위치에 근접한 3차원적 좌표계 내에서 2개의 축에 대하여 상기 제 1 IMU가 회전하는 동안 상기 제 1 IMU의 자력계로부터 제 3 판독을 수집하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 99]
청구항 98에 있어서, 상기 제 3 판독을 이용하여 상이한 방향에서 포인트 클라우드 및 맵 중 적어도 하나를 통하여 상기 작용 중인 자기장을 묘사하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 100]
청구항 99에 있어서, 상기 작용중인 자기장은 상기 맵을 통하여 묘사되며 및 상기 맵은 등각뷰, 정면도, 및 상면도를 포함함을 특징으로 하는 방법.
[청구항 101]
청구항 100에 있어서, 상기 맵은 타원체를 묘사함을 특징으로 하는 방법.
[청구항 102]
청구항 98에 있어서, 상기 작용 중인 자기장에서 왜곡을 확인하기 위하여, 상기 자력계로부터의 미래 판독에 보정 계수를 인가하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 103]
청구항 102에 있어서, 상기 보정 계수는 획일적인, 구형 자기장을 추정함을 특징으로 하는 방법.
[청구항 104]
청구항 103에 있어서, 상기 보정 계수는 타원체 자기장 데이터 세트를 구형 자기장 데이터 세트로 변환함을 특징으로 하는 방법.
[청구항 105]
청구항 93에 있어서, 상기 제 1 IMU로부터의 판독은 상기 제 1 IMU이 캘리브레이션-후에 사용되는 위치 근처에서 발생됨을 특징으로 하는 방법.
[청구항 106]
청구항 105에 있어서, 상기 위치는 수술실임을 특징으로 하는 방법.
[청구항 107]
청구항 106에 있어서, 상기 위치는 상기 수술실에서 환자 침대 근처임을 특징으로 하는 방법.
[청구항 108]
청구항 93에 있어서, 상기 제 1 IMU을 회전 플랫폼에 장착하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 109]
청구항 108에 있어서, 상기 제 1 IMU는 상기 회전 플랫폼에 스냅-핏됨을 특징으로 하는 방법.
[청구항 110]
청구항 93에 있어서, 상기 제 1 IMU 및 제 2 IMU을 회전 플랫폼에 장착하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 111]
청구항 93에 있어서, 상기 제 1 IMU 및 다수의 IMUs을 회전 플랫폼에 장착하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 112]
관성 측정 캘리브레이션 장치로서:
고정적인 베이스;
제 1 축에 대하여 상기 고정적인 베이스에 대하여 회전 재위치 가능한 외부 스테이지;
상기 고정적인 베이스에 대하여 상기 외부 스테이지의 동작을 구동하기 위하여 상기 외부 스테이지에 작동 상 결합된 제 1 모터;
상기 제 1 축에 대하여 수직인 제 2 축에 대하여 상기 외부 스테이지에 대하여 회전 재위치 가능한 플랫폼;
상기 외부 스테이지에 대하여 상기 플랫폼의 동작을 구동하기 위하여 상기 플랫폼에 작동 상 결합된 제 2 모터; 그리고,
상기 제 1 및 제 2 모터의 작동을 제어하기 위하여 구성되는 제어기로 이루어지는 하는 관성 측정 캘리브레이션 장치.
[청구항 113]
청구항 112에 있어서, 상기 외부 스테이지는 블록 U-형상 프로파일을 포함함을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 114]
청구항 112에 있어서, 상기 제 1 모터 및 구동축에 장착된 기어링을 더욱 포함하며, 상기 구동축은 상기 외부 스테이지에 장착됨을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 115]
청구항 114에 있어서, 상기 고정적인 베이스 및 상기 외부 스테이지 사이에 개재되는 베어링 판을 더욱 포함하며, 상기 베어링 판은 상기 구동축의 장착을 위하여 축방향 개구부를 포함함을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 116]
청구항 115에 있어서, 상기 베어링 판 및 상기 고정적인 베이스는 상기 구동축의 장착을 위하여 상응하는 축방향 개구부를 포함함을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 117]
청구항 114에 있어서, 상기 구동축 및 상기 외부 스테이지에 장착되는 슬립링을 더욱 포함함을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 118]
청구항 112에 있어서, 해당 롤러 베어링 어셈블리에 대하여 회전하는 중앙축을 더욱 포함하며, 상기 중앙축은 상기 플랫폼에 장착되고, 상기 롤러 베어링 어셈블리는 상기 외부 스테이지에 장착됨을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 119]
청구항 118에 있어서, 상기 제 2 모터는 풀리 및 벨트에 의하여 상기 중앙축에 결합됨을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 120]
청구항 119에 있어서, 상기 풀리 중 제 1 풀리는 상기 제 2 모터에 장착되고, 상기 풀리 중 제 2 풀리는 상기 중앙축에 장착되며, 및 상기 벨트는 상기 제 1 및 제 2 풀리에 감김을 특징으로 하는 상기 관성 측정 캘리브레이션 장치.
[청구항 121]
3차원적 공간에서 수술기구를 추적하는 방법으로서:
다수의 수술기구 각각의 외부 치수에 대한 데이터를 가지며;
제 1 관성 측정 장치가 상기 다수의 수술기구 각각에 개별적으로 장착되는 위치 및 방향을 알고;
상기 제 1 관성 측정 장치가 상기 다수의 수술기구 중 어느 것에 장착되는지를 알고;
상기 제 1 관성 측정 장치를 캘리브레이션하고;
상기 다수의 수술기구 중 적어도 하나에 장착된 동안 3차원적 공간에서 상기 제 1 관성 측정 장치를 무선으로 추적하고; 그리고
상기 다수의 수술기구 중 상기 제 1 관성 측정 장치가 장착된 적어도 하나에 대하여 수술기구 방향 및 위치 정보를 사용자에게 전달하는 단계로 이루어지는 3차원적 공간에서 수술기구를 추적하는 방법.
[청구항 122]
청구항 121에 있어서, 상기 전달된 방향 및 위치 정보는 시각적 디스플레이로 묘사됨을 특징으로 하는 방법.
[청구항 123]
청구항 122에 있어서, 상기 시각적 디스플레이는 상기 다수의 수술기구 중 상기 제 1 관성 측정 장치가 장착된 상기 적어도 하나에 대한 3차원적 모델을 묘사함을 특징으로 하는 방법.
[청구항 124]
청구항 122에 있어서, 상기 시각적 디스플레이는, 환자 인체의 가상 모델에 더하여, 상기 다수의 수술기구 중 상기 제 1 관성 측정 장치가 장착된 상기 적어도 하나에 대한 3차원적 모델을 묘사함을 특징으로 하는 방법.
[청구항 125]
청구항 124에 있어서, 상기 시각적 디스플레이는 상기 환자 인체의 가상 모델에 대하여 상기 다수의 수술기구 중 상기 적어도 하나의 위치 변화를 묘사하기 위하여 실시간으로 업데이트됨을 을 특징으로 하는 방법.
[청구항 126]
청구항 125에 있어서, 상기 환자 인체는 골반, 대퇴골, 및 상박골 중 적어도 하나로 이루어짐을 특징으로 하는 방법.
[청구항 127]
청구항 121에 있어서, 수술기구 방향 및 위치 정보를 전달하는 것은 상기 다수의 수술기구 중 상기 제 1 관성 측정 장치가 장착된 상기 적어도 하나에 연관된 인디케이터에 정보를 제공하는 것으로 이루어짐을 특징으로 하는 방법.
[청구항 128]
청구항 127에 있어서, 상기 인디케이터는 상기 다수의 수술기구 중 상기 적어도 하나가 수술-전 계획에 따라 방향지어지는지를 표시하는 다수의 라이트로 이루어짐을 특징으로 하는 방법.
[청구항 129]
청구항 127에 있어서, 상기 인디케이터는 상기 다수의 수술기구 중 상기 적어도 하나가 수술-전 계획에 따라 무슨 방향으로 방향지어지는지를 표시하는 다수의 라이트로 이루어짐을 특징으로 하는 방법.
[청구항 130]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 수술용 리머로 이루어짐을 특징으로 하는 방법.
[청구항 131]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 비구컵 삽입기로 이루어짐을 특징으로 하는 방법.
[청구항 132]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 수술용 드릴로 이루어짐을 특징으로 하는 방법.
[청구항 133]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 수술용 톱으로 이루어짐을 특징으로 하는 방법.
[청구항 134]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 대퇴골 스템 삽입기로 이루어짐을 특징으로 하는 방법.
[청구항 135]
청구항 121에 있어서, 상기 다수의 수술기구 중 상기 적어도 하나가 임플란트 배치 가이드로 이루어짐을 특징으로 하는 방법.
[청구항 136]
청구항 121에 있어서, 참조 객체에 장착되는 동안 3차원적 공간 내에서 제 2 관성 측정 장치를 무선으로 추적하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 137]
청구항 136에 있어서, 상기 참조 객체는 골반, 대퇴골, 상박골, 및 견갑골 중 적어도 하나로 이루어지는 뼈임을 특징으로 하는 방법.
[청구항 138]
청구항 121에 있어서, 상기 제 1 관성 측정 장치 및 상기 제 2 관성 측정 장치를 서로에 대하여 등록하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 139]
청구항 121에 있어서:
상기 환자 인체의 일부에 대하여 환자-맞춤형 등록 도구를 위치시키고, 여기에서 상기 환자-맞춤형 등록 도구를 위치시키는 것은 알려진 단일의 위치 및 방향으로 상기 환자 인체에 정확히 결합되며, 상기 환자-맞춤형 등록 도구는 알려진 위치 및 방향으로 그에 장착되는 상기 제 1 관성 측정 장치를 포함함;
상기 환자-맞춤형 등록 도구가 상기 환자에 대하여 고정적인 동안 상기 제 1 관성 측정 장치로부터 데이터를 수집하고;
상기 환자 인체에 대하여 제 2 관성 측정 장치의 알려진 위치를 설정하고;
상기 환자-맞춤형 등록 도구로부터 상기 제 1 관성 측정 장치를 제거하고; 그리고,
상기 제 1 관성 측정 장치를 상기 다수의 수술기구 중 적어도 하나에 장착하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 140]
청구항 121에 있어서, 제 1 관성 측정 장치는 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법을 이용하도록 프로그램됨을 특징으로 하는 방법.
[청구항 141]
청구항 121에 있어서, 상기 제 1 관성 측정 장치는 제 1 자이로스코프 데이터 세트 및 다수의 가속 데이터 세트를 발생하도록 구성된 자이로스코프 및 다수의 가속도계를 포함함을 특징으로 하는 방법.
[청구항 142]
청구항 141에 있어서, 상기 제 1 자이로스코프 데이터 세트는 3개의 수직축에 대하여 확인됨을 특징으로 하는 방법.
[청구항 143]
청구항 141에 있어서, 상기 다수의 가속 데이터 세트는 3개의 수직축에 대하여 확인되며, 상기 다수의 가속 데이터 세트 각각은 상기 3개의 수직축의 분리를 확인함을 특징으로 하는 방법.
[청구항 144]
청구항 141에 있어서, 상기 제 1 관성 측정 장치는 다수의 자기장 데이터 세트를 발생하도록 구성된 다수의 자력계를 포함함을 특징으로 하는 방법.
[청구항 145]
청구항 144에 있어서, 상기 다수의 자기장 데이터는 3개의 수직축에 대하여 확인되며, 상기 다수의 자기장 데이터 세트 각각은 상기 3개의 수직축의 분리를 확인함을 특징으로 하는 방법.
[청구항 146]
청구항 121에 있어서, 상기 제 1 관성 측정 장치는, 위치 데이터를 발생하기 위하여 이용되는, X, Y, Z 축에 대한 제 1 자이로스코프 데이터 세트, X, Y, Z 축에 대한 제 1 가속 데이터 세트, 및 X, Y, Z 축에 대한 제 1 자기장 데이터 세트를 발생하도록 구성되는 자이로스코프, 가속도계, 및 자력계를 포함함을 특징으로 하는 방법.
[청구항 147]
청구항 146에 있어서, 상기 제 1 자이로스코프 데이터 세트, 상기 제 1 가속 데이터 세트, 및 상기 제 1 자기장 데이터 세트를 이용하여 제 1 방향에 대하여 상기 폰 미제스 피셔 밀도의 미리-결정된 분산 인자로써 중립 위치 주위에 제 1의 N 입자 세트를 발생하는 단계를 더욱 포함하며, 각각의 입자는 상기 위치 데이터를 발생하는 것의 일부로서 쿼터니언 형태로 상기 X, Y, Z 축 주위에서 방향을 나타냄을 특징으로 하는 방법.
[청구항 148]
청구항 147에 있어서, 상기 입자는 상기 동일한 확률 밀도 공간으로부터 이끌어낸 독립적이며 동일하게 분포된 확률변수 세트로 이루어짐을 특징으로 하는 방법.
[청구항 149]
청구항 147에 있어서, 상기 입자는 관찰된 방향의 통계적으로 이루어진 변화임을 특징으로 하는 방법.
[청구항 150]
청구항 147에 있어서, 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트를 이용하여 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 151]
청구항 150에 있어서, 상기 제 1 방향을 추정하는 것은 상기 제 1 관성 측정 장치의 틸트를 아는 것을 포함함을 특징으로 하는 방법.
[청구항 152]
청구항 151에 있어서, 상기 틸트는 상기 제 1 가속 데이터 세트로부터 결정됨을 특징으로 하는 방법.
[청구항 153]
청구항 152에 있어서, 상기 제 1 관성 측정 장치의 틸트를 이용하여 상기 제 1 자기장 데이터 세트를 수학적으로 정정하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 154]
청구항 150에 있어서, 상기 제 1 방향을 추정하는 것은 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트를 이용하여 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것을 포함함을 특징으로 하는 방법.
[청구항 155]
청구항 154에 있어서, 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것은 가우스 뉴턴 최적화 방법을 이용함을 특징으로 하는 방법.
[청구항 156]
청구항 154에 있어서, 상기 제 1 관성 측정 장치의 제 1 방향을 추정하는 것은 상기 제 1 가속 데이터 세트 및 상기 제 1 자기장 데이터 세트로부터 틸트 및 헤딩 데이터의 오차의 허용 여유도 내에 있는 틸트 및 헤딩을 이용하여 방향을 반복적으로 결정하는 것을 포함함을 특징으로 하는 방법.
[청구항 157]
청구항 147에 있어서, 상기 제 1 방향 추정을 이용하여 평균을 중심으로 상기 중립 위치에서 상기 제 1의 N 입자 세트를 회전시키는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 158]
청구항 157에 있어서, 상기 제 1 자이로스코프 데이터 세트를 이용하여 시간에서 순방향 상기 제 1의 N 입자 세트를 순방향 추정하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 159]
청구항 158에 있어서, 단 하나의 쿼터니언이 남을 때까지 상기 추정된 순방향 제 1의 N 입자 세트로부터 2개의 쿼터니언을 반복적으로 보간함으로써 상기 추정된 순방향 제 1의 N 입자 세트를 평균내는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 160]
청구항 158에 있어서, 상기 자이로스코프, 상기 가속도계, 및 상기 자력계는 위치 데이터를 발생하는 데에 이용되는 X, Y, Z 축에 대한 제 2 자이로스코프 데이터 세트, X, Y, Z 축에 대한 제 2 가속 데이터 세트, 및 X, Y, Z 축에 대한 제 2 자기장 데이터 세트를 발생하도록 구성됨을 특징으로 하는 방법.
[청구항 161]
청구항 160에 있어서, 상기 제 2 자이로스코프 데이터 세트, 상기 제 2 가속 데이터 세트, 및 상기 제 2 자기장 데이터 세트를 이용하여 제 2 방향에 대하여 상기 폰 미제스 피셔 밀도의 미리-결정된 분산 인자로써 중립 위치 주위에 제 2의 N 입자 세트를 발생하는 단계를 더욱 포함하며, 각각의 입자는 상기 위치 데이터를 발생하는 것의 일부로서 쿼터니언 형태로 상기 X, Y, Z 축 주위에서 방향을 나타냄을 특징으로 하는 방법.
[청구항 162]
청구항 161에 있어서, 상기 제 1 관성 측정 장치의 제 2 방향을 상기 제 1 방향에 비교하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 163]
청구항 162에 있어서, 상기 비교 동작은 제 2 상태로부터의 상기 제 2의 N 입자 세트를, 제 1 상태로부터 시간에서 상기 제 1의 N 입자 세트를 순방향 추정하는 것으로부터의 상기 제 1의 N 입자 세트와 비교하는 것을 포함함을 특징으로 하는 방법.
[청구항 164]
청구항 163에 있어서, 상기 비교 동작은 상기 순방향 추정 작동으로 인한 상기 제 1의 N 입자 세트에 가장 가까운 상기 제 2의 N 입자 세트에 더욱 크게 가중되는 가중 정확도를 포함함을 특징으로 하는 방법.
[청구항 165]
청구항 164에 있어서, 상기 비교 동작은 상기 제 2의 N 입자 세트로부터 작은 가중치 입자를 배제하는 것 포함함을 특징으로 하는 방법.
[청구항 166]
청구항 162에 있어서, 상기 발생 동작과 현재 관찰된 방향을 즉각적인 방향 예측에 기초한 방향의 계산에 비교하기 위한 비교 동작을 반복하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 167]
수술실에서 관성 측정 장치를 등록하는 방법으로서:
제 1 관성 측정 장치를 환자에 장착하고;
상기 환자 인체의 일부에 대하여 환자-맞춤형 등록 도구를 위치시키고, 여기에서 상기 환자-맞춤형 등록 도구를 위치시키는 것은 알려진 단일의 위치 및 방향으로 상기 환자 인체에 정확히 결합되며, 상기 환자-맞춤형 등록 도구는 알려진 위치 및 방향으로 그에 장착되는 상기 제 2 관성 측정 장치를 포함함;
상기 환자-맞춤형 등록 도구가 상기 환자에 대하여 고정적인 동안 상기 제 1 및 제 2 관성 측정 장치로부터 데이터를 수집하고;
상기 환자 인체에 대하여 제 2 관성 측정 장치의 알려진 위치를 설정하고;
상기 환자-맞춤형 등록 도구로부터 상기 제 2 관성 측정 장치를 제거하고; 그리고,
상기 제 2 관성 측정 장치를 제 1 수술기구에 장착하는 단계로 이루어지는 수술실에서 관성 측정 장치를 등록하는 방법.
[청구항 168]
청구항 167에 있어서, 상기 제 1 수술기구로부터 상기 제 2 관성 측정 장치를 제거하고 상기 제 2 관성 측정 장치를 제 2 수술기구에 장착하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 169]
청구항 167에 있어서, 상기 환자 인체는 비구컵으로 이루어지며 상기 제 1 관성 측정 장치는 골반에 장착됨을 특징으로 하는 방법.
[청구항 170]
청구항 167에 있어서, 상기 제 1 수술기구는 수술용 리머임을 특징으로 하는 방법.
[청구항 171]
청구항 167에 있어서, 상기 제 1 수술기구는 비구컵 삽입기임을 특징으로 하는 방법.
[청구항 172]
청구항 167에 있어서, 상기 제 1 수술기구는 수술용 드릴임을 특징으로 하는 방법.
[청구항 173]
청구항 167에 있어서, 상기 환자 인체는 대퇴골두로 이루어지며 상기 제 1 관성 측정 장치는 대퇴골에 장착됨을 특징으로 하는 방법.
[청구항 174]
청구항 167에 있어서, 상기 제 1 수술기구는 수술용 톱임을 특징으로 하는 방법.
[청구항 175]
청구항 167에 있어서, 상기 제 1 수술기구는 대퇴골 스템 삽입기임을 특징으로 하는 방법.
[청구항 176]
청구항 167에 있어서, 상기 환자 인체는 상박골 볼(humeral ball)로 이루어지며 상기 제 1 관성 측정 장치는 상박골에 장착됨을 특징으로 하는 방법.
[청구항 177]
청구항 167에 있어서, 상기 환자 인체는 관절와로 이루어지며 상기 제 1 관성 측정 장치는 견갑골에 장착됨을 특징으로 하는 방법.
[청구항 178]
외상 뼈 판을 구성하는 방법으로서:
다수의 3차원적 가상 템플릿 뼈 판 모델로부터 3차원적 가상 템플릿 뼈 판 모델을 선택하고;
골절된 뼈에 해당하는 3차원적 뼈 모델을 제작하고;
상기 선택된 3차원적 가상 템플릿 뼈 판 모델에 해당하는 3차원적 템플릿 뼈 판을 제작하고; 그리고
환자-맞춤형 뼈 판을 제작하기 위하여 상기 3차원적 템플릿 뼈 판을 상기 3차원적 뼈 모델에 수동으로 맞춤하는 단계로 이루어지는 외상 뼈 판을 구성하는 방법.
[청구항 179]
청구항 178에 있어서, 상기 골절된 뼈에 해당하는 3차원적 가상 뼈 모델를 구성하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 180]
청구항 179에 있어서, 상기 골절된 뼈 요소의 3차원적 가상 뼈 모델을 제작하기 위하여 상기 골절된 뼈의 의료 영상 데이터를 이용하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 181]
청구항 180에 있어서, 3차원적 가상 패치워크 뼈 모델을 제작하기 위하여 상기 3차원적 가상 뼈 모델을 감소시키는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 182]
청구항 181에 있어서, 상기 골절된 뼈의 3차원적 가상 비골절된 뼈 모델을 제작하기 위하여 상기 3차원적 가상 패치워크 뼈 모델을 모핑하기 위하여 스태티스티컬 아틀라스로부터의 뼈 데이터를 이용하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 183]
청구항 182에 있어서, 상기 3차원적 뼈 모델을 제작하기 위하여 상기 3차원적 가상 비골절된 뼈 모델을 이용하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 184]
청구항 182에 있어서, 상기 3차원적 가상 템플릿 뼈 판 모델을 선택하는 것은 상기 다수의 3차원적 가상 템플릿 뼈 판 모델 중 상기 설계 파라미터에 가장 가깝게 유사한 것을 결정하기 위하여 상기 3차원적 가상 비골절된 뼈 모델로부터 설계 파라미터를 추출하는 것을 포함함을 특징으로 하는 방법.
[청구항 185]
청구항 184에 있어서, 상기 설계 파라미터는 길이방향 외상 판 길이, 길이방향 외상 판 곡률, 외측 외상 판 곡률, 외측 외상 판 길이, 및 외상 판 고정 위치. 중 적어도 하나를 포함함을 특징으로 하는 방법.
[청구항 186]
청구항 178에 있어서, 상기 3차원적 뼈 모델을 제작하는 것은 상기 골절된 뼈에 해당하는 3차원적 가상 뼈 모델을 묘사하는 기계어를 출력하는 것을 포함함을 특징으로 하는 방법.
[청구항 187]
청구항 186에 있어서, 상기 기계어는 쾌속 조형기로 하여금 애디티브법(additive process) 및 서브트랙티브법(substractive process) 중 적어도 하나를 이용하여 상기 3차원적 뼈 모델을 구성할 수 있도록 구성됨을 특징으로 하는 방법.
[청구항 188]
청구항 187에 있어서, 상기 애디티브법은 3차원적 프린팅을 포함함을 특징으로 하는 방법.
[청구항 189]
청구항 187에 있어서, 상기 서브트랙티브법은 블록으로부터 재료를 제거하도록 가공하는 것을 포함함을 특징으로 하는 방법.
[청구항 190]
청구항 178에 있어서, 상기 3차원적 템플릿 뼈 판을 상기 3차원적 뼈 모델에 수동으로 맞추는 것은 상기 3차원적 뼈 모델에 더욱 가깝게 일치되도록 상기 3차원적 템플릿 뼈 판을 구부리는 것을 포함함을 특징으로 하는 방법.
[청구항 191]
청구항 178에 있어서, 상기 환자-맞춤형 뼈 판을 살균하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 192]
외상 뼈 판을 구성하는 시스템으로서:
다음의 동작을 수행하도록 구성된 소프트웨어가 설치된 컴퓨터:
상기 골절된 뼈의 의료 영상 데이터를 이용하여 골절된 뼈의 골절된 뼈 요소의 3차원적 가상 뼈 모델을 구성하고,
조립된 상기 3차원적 가상 뼈 모델을 갖는 3차원적 가상 패치워크 뼈 모델을 생성하기 위하여 상기 3차원적 가상 뼈 모델을 축소하고,
상기 3차원적 가상 패치워크 뼈 모델을 상기 골절된 뼈의 3차원적 가상 비골절된 뼈 모델에 모핑하기 위하여 스태티스티컬 아틀라스로부터의 뼈 데이터를 이용하고,
상기 3차원적 가상 비골절된 뼈 모델을 묘사하는 기계어를 출력하고, 그리고
상기 3차원적 가상 비골절된 뼈 모델과 가장 일치하는 3차원적 가상 템플릿 뼈 판 모델을 다수의 3차원적 가상 템플릿 뼈 판 모델로부터 선택하는 단계로 이루어짐을 특징으로 하는 외상 뼈 판을 구성하는 시스템.
[청구항 193]
청구항 192에 있어서, 상기 3차원적 가상 템플릿 뼈 판 모델을 선택하는 것은 상기 다수의 3차원적 가상 템플릿 뼈 판 모델 중 상기 설계 파라미터에 가장 가깝게 유사한 것을 결정하기 위하여 상기 3차원적 가상 비골절된 뼈 모델로부터 설계 파라미터를 추출하는 것을 포함함을 특징으로 하는 시스템.
[청구항 194]
청구항 193에 있어서, 상기 설계 파라미터는 길이방향 외상 판 길이, 길이방향 외상 판 곡률, 외측 외상 판 곡률, 외측 외상 판 길이, 및 외상 판 고정 위치 중 적어도 하나를 포함함을 특징으로 하는 시스템.
[청구항 195]
청구항 192에 있어서, 상기 기계어는 상기 기계어는 쾌속 조형기로 하여금 애디티브법 및 서브트랙티브법 중 적어도 하나를 이용하여 상기 3차원적 뼈 모델을 구성할 수 있도록 구성됨을 특징으로 하는 시스템.
[청구항 196]
청구항 195에 있어서, 상기 애디티브법은 3차원적 프린팅을 포함함을 특징으로 하는 시스템.
[청구항 197]
청구항 195에 있어서, 상기 서브트랙티브법은 블록으로부터 재료를 제거하도록 가공하는 것을 포함함을 특징으로 하는 시스템.
[청구항 198]
엉덩이 케이지를 구성하는 방법으로서:
다수의 3차원적 가상 템플릿 엉덩이 케이지 모델로부터 3차원적 가상 템플릿 엉덩이 케이지 모델을 선택하고;
골절된 뼈 및 쇠퇴된 뼈 중 적어도 하나로 이루어지는 불규칙한 뼈에 해당하는 3차원적 뼈 모델을 제작하고;
상기 선택된 3차원적 가상 템플릿 엉덩이 케이지 모델에 해당하는 3차원적 템플릿 엉덩이 케이지를 제작하고; 그리고,
환자-맞춤형 엉덩이 케이지를 제작하기 위하여 상기 3차원적 템플릿 엉덩이 케이지를 상기 3차원적 뼈 모델에 수동으로 ?춤하는 단계로 이루어지는 엉덩이 케이지를 구성하는 방법.
[청구항 199]
청구항 198에 있어서, 상기 불규칙한 뼈에 해당하는 3차원적 가상 뼈 모델를 구성하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 200]
청구항 199에 있어서, 상기 3차원적 가상 뼈 모델을 구성하는 것은 스태티스티컬 아틀라스 내 뼈 모델에 대한 해부학적 랜드마크에 비하여 해부학적 랜드마크를 발생하는 것을 포함함을 특징으로 하는 방법.
[청구항 201]
청구항 198에 있어서, 상기 다수의 3차원적 가상 템플릿 엉덩이 케이지 모델로부터 상기 3차원적 가상 템플릿 엉덩이 케이지 모델을 선택하는 것은, 상기 다수의 3차원적 가상 템플릿 엉덩이 케이지 모델 중에서, 상기 3차원적 가상 템플릿 엉덩이 케이지 모델의 해부학적 랜드마크에 가장 가깝게 맞추어지는 것을 계산하는 것을 포함함을 특징으로 하는 방법.
[청구항 202]
청구항 198에 있어서, 상기 다수의 3차원적 가상 템플릿 엉덩이 케이지 모델로부터 상기 3차원적 가상 템플릿 엉덩이 케이지 모델을 선택하는 것은, 상기 3차원적 뼈 모델에 해당하는 3차원적 가상 뼈 모델에 상기 3차원적 가상 템플릿 엉덩이 케이지 모델이 장착되는 위치를 계산하는 것을 포함함을 특징으로 하는 방법.
[청구항 203]
청구항 198에 있어서, 상기 환자-맞춤형 엉덩이 케이지를 상기 불규칙한 뼈 상에 배치하는 데에 이용되는 3차원적 배치 가이드를 구성하기 위하여 기계어를 출력하는 데에 이용되는 3차원적 가상 배치 가이드를 구성하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 204]
청구항 198에 있어서, 상기 3차원적 뼈 모델을 제작하는 것은 상기 불규칙한 뼈에 해당하는 3차원적 가상 뼈 모델을 묘사하는 기계어를 출력하는 것을 포함함을 특징으로 하는 방법.
[청구항 205]
청구항 204에 있어서, 상기 기계어는 쾌속 조형기로 하여금 애디티브법 및 서브트랙티브법 중 적어도 하나를 이용하여 상기 3차원적 뼈 모델을 구성할 수 있도록 구성됨을 특징으로 하는 방법.
[청구항 206]
청구항 205에 있어서, 상기 애디티브법은 3차원적 프린팅을 포함함을 특징으로 하는 방법.
[청구항 207]
청구항 205에 있어서, 상기 서브트랙티브법은 블록으로부터 재료를 제거하도록 가공하는 것을 특징으로 하는 방법.
[청구항 208]
청구항 198에 있어서, 상기 3차원적 템플릿 엉덩이 케이지를 상기 3차원적 뼈 모델에 수동으로 맞추는 것은 상기 3차원적 뼈 모델에 더욱 가깝게 일치되도록 상기 3차원적 템플릿 엉덩이 케이지를 구부리는 것을 포함함을 특징으로 하는 방법.
[청구항 209]
청구항 198에 있어서, 상기 환자-맞춤형 엉덩이 케이지를 살균하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 210]
엉덩이 케이지 구성 시스템으로서:
다음의 동작을 수행하도록 구성된 소프트웨어가 설치된 컴퓨터:
골절된 뼈 및 쇠퇴된 뼈 중 적어도 하나로 이루어지는 불규칙한 뼈의 3차원적 가상 뼈 모델을, 상기 불규칙한 뼈의 의료 영상 데이터를 이용하여, 구성하고,
다수의 3차원적 가상 템플릿 엉덩이 케이지 모델로부터, 상기 3차원적 가상 뼈 모델에 가장 일치하는 3차원적 가상 템플릿 엉덩이 케이지 모델을 선택하고,
엉덩이 케이지가 상기 불규칙한 뼈에 장착되는 위치를 결정하고 상기 위치를 이용하여 3차원적 가상 엉덩이 케이지 배치 가이드를 제작하고, 그리고
상기 3차원적 가상 뼈 모델을 묘사하는 기계어를 출력하는 단계로 이루어지는 엉덩이 케이지 구성 시스템.
[청구항 211]
청구항 210에 있어서, 상기 3차원적 가상 템플릿 엉덩이 케이지 모델을 선택하는 것은, 상기 3차원적 가상 뼈 모델을 자동으로 랜드마킹하는 것 및 상기 다수의 3차원적 가상 템플릿 엉덩이 케이지 모델 중에서 상기 랜드마크에 가장 잘 일치하는 것을 결정하는 것을 포함함을 특징으로 하는 방법.
[청구항 212]
청구항 210에 있어서, 상기 기계어는 상기 기계어는 쾌속 조형기로 하여금 애디티브법 및 서브트랙티브법 중 적어도 하나를 이용하여 상기 3차원적 뼈 모델을 구성할 수 있도록 구성됨을 특징으로 하는 방법.
[청구항 213]
청구항 212에 있어서, 상기 애디티브법은 3차원적 프린팅을 포함함을 특징으로 하는 시스템.
[청구항 214]
청구항 212에 있어서, 상기 서브트랙티브법은 블록으로부터 재료를 제거하도록 가공하는 것을 특징으로 하는 시스템.
[청구항 215]
해부학적 구조(body anatomy)를 운동학적으로 추적하는 방법으로서:
상기 인체 해부학적 구조의 3차원적 가상 모델을 제작하고;
상기 3차원적 가상 모델을 자동으로 랜드마킹하고;
상기 인체 해부학적 구조의 실제 움직임을 반영하기 위하여 상기 3차원적 가상 모델을 동적 움직임으로 그리고 실시간 업데이트되게 시각적으로 디스플레이하고;
상기 인체 해부학적 구조를 3차원적 공간에서 동적으로 추적하기 위하여, 상기 인체 해부학적 구조에 장착된 제 1 관성 측정 장치 및 제 2 관성 측정 장치로부터 신호를 수신하고; 그리고
상기 인체 해부학적 구조를 상기 3차원적 가상 모델에 등록하는 단계로 이루어지는 해부학적 구조를 운동학적으로 추적하는 방법.
[청구항 216]
청구항 215에 있어서, 상기 인체 해부학적 구조의 상기 3차원적 가상 모델은 차원적 가상 뼈 모델 및 3차원적 가상 연조직 모델을 포함함을 특징으로 하는 방법.
[청구항 217]
청구항 216에 있어서, 상기 3차원적 가상 연조직 모델은 3차원적 가상 힘줄 모델 및 3차원적 가상 인대 모델 중 적어도 하나를 포함함을 특징으로 하는 방법.
[청구항 218]
청구항 216에 있어서, 상기 3차원적 가상 뼈 모델은 뼈의 영상 데이터를 분할함으로써 제작됨을 특징으로 하는 방법.
[청구항 219]
청구항 216에 있어서, 상기 3차원적 가상 연조직 모델은 연조직의 영상 데이터를 분할함으로써 제작됨을 특징으로 하는 방법.
[청구항 220]
청구항 216에 있어서, 상기 3차원적 가상 연조직 모델은 연조직 위치를 추정하기 위하여 스태티스티컬 아틀라스를 이용하여 제작됨을 특징으로 하는 방법.
[청구항 221]
청구항 215에 있어서, 상기 3차원적 가상 모델을 자동으로 랜드마킹하는 것은 상기 스태티스티컬 아틀라스에 걸쳐 해부학적 랜드마크를 계산하기 위하여 스태티스티컬 아틀라스로부터의 입력을 이용하는 것을 포함함을 특징으로 하는 방법.
[청구항 222]
청구항 215에 있어서, 상기 3차원적 가상 모델을 자동으로 랜드마킹하는 것은 상기 스태티스티컬 아틀라스에 걸쳐 해부학적 랜드마크를 계산하기 위하여 국소적 기하학적 해석을 이용하는 것을 포함함을 특징으로 하는 방법.
[청구항 223]
청구항 215에 있어서:
상기 인체 해부학적 구조의 상기 3차원적 가상 모델은 3차원적 가상 뼈 모델 및 3차원적 가상 연조직 모델을 포함하고; 그리고,
자동으로 랜드마킹 상기 3차원적 가상 모델은 가상 3차원적 연조직 모델이 상응하게 제작되는 곳의 연조직의 위치 및 치수를 제공하기 위하여 상기 3차원적 가상 뼈 모델에 대한 상기 해부학적 랜드마크를 포함함을 특징으로 하는 방법.
[청구항 224]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 상기 제 1 및 제 2 관성 측정 장치로부터의 신호를 상기 3차원적 가상 모델에서의 동적 그래픽 변화로 변환하는 것을 포함함을 특징으로 하는 방법.
[청구항 225]
청구항 224에 있어서, 상기 제 1 및 제 2 관성 측정 장치로부터의 신호는 상기 제 2 관성 측정 장치에 대한 상기 제 1 관성 측정 장치의 상대적인 방향을 결정하기 위하여 컴퓨터에 의하여 처리됨을 특징으로 하는 방법.
[청구항 226]
청구항 215에 있어서, 상기 제 1 및 제 2 관성 측정 장치 각각은, 각각의 관성 측정 장치에 관련된 자이로스코프, 가속도계, 및 자력계 중 적어도 하나로부터의 입력을 이용하여 각각의 관성 측정 장치의 위치 변화를 계산하기 위하여, 폰 미제스 피셔 밀도 알고리즘을 갖는 순차적인 몬테 카를로 방법을 이용하도록 프로그램된 프로세서를 가짐을 특징으로 하는 방법.
[청구항 227]
청구항 215에 있어서, 상기 인체 해부학적 구조는 인체 관절로 이루어지며, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 상기 인체 관절의 표면들 사이의 접촉 분포를 반영하는 시각적 표시를 발생하는 것을 포함함을 특징으로 하는 방법.
[청구항 228]
청구항 227에 있어서, 상기 시각적 표시는 칼라 코드화됨을 특징으로 하는 방법.
[청구항 229]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 연조직 변형의 위치를 하이라이팅하는 것을 포함함을 특징으로 하는 방법.
[청구항 230]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 상기 3차원적 가상 모델의 다양한 움직임을 통하여 인체축을 디스플레이하는 것을 포함함을 특징으로 하는 방법.
[청구항 231]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 인체 데이터 및 운동학적 데이터를 동시에 디스플레이하는 것을 포함함을 특징으로 하는 방법.
[청구항 232]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 3차원적 가상 연조직 모델 및 3차원적 가상 뼈 모델을 포함하며, 상기 3차원적 가상 연조직 모델에서의 동적 변화는 연조직 부착 부위에 대한 뼈의 운동학적 움직임에 연결된 스태티스티컬 아틀라스를 이용하여 달성됨을 특징으로 하는 방법.
[청구항 233]
청구항 215에 있어서, 상기 3차원적 가상 모델을 동적 움직임으로 시각적으로 디스플레이하는 것은 3차원적 가상 인대 모델 및 3차원적 가상 뼈 모델을 포함하며, 상기 3차원적 가상 인대 모델에서의 동적 변화는 인대 부착 부위에 대한 뼈의 운동학적 움직임에 연결된 스태티스티컬 아틀라스를 이용하여 달성됨을 특징으로 하는 방법.
[청구항 234]
청구항 215에 있어서:
상기 인체 해부학적 구조는 경골 및 대퇴골을 포함하며, 그리고
상기 제 1 관성 측정 장치는 상기 경골에 장착되고, 상기 제 2 관성 측정 장치는 상기 대퇴골에 장착됨을 특징으로 하는 방법.
[청구항 235]
청구항 215에 있어서:
상기 인체 해부학적 구조는 척추뼈를 포함하고, 그리고
상기 제 1 관성 측정 장치는 제 1 척추에 장착되고, 상기 제 2 관성 측정 장치는 제 2 척추에 장착됨을 특징으로 하는 방법.
[청구항 236]
청구항 215에 있어서:
상기 인체 해부학적 구조는 제 1 뼈 및 제 2 뼈를 포함하며, 그리고
상기 제 1 관성 측정 장치는 상기 제 1 뼈에 장착되고, 상기 제 2 관성 측정 장치는 상기 제 2 뼈에 장착됨을 특징으로 하는 방법.
[청구항 237]
청구항 215에 있어서,
상기 인체 해부학적 구조를 3차원적 공간에서 동적으로 추적하기 위하여, 상기 인체 해부학적 구조에 장착된 제 1 관성 측정 장치 및 제 2 관성 측정 장치로부터 신호를 수신하는 것은 또한 3차원적 공간에서 상기 제 1 및 제 2 관성 측정 장치의 위치를 알기 위하여 초광대역 추적 시스템의 추적 센서를 이용하는 것을 포함함을 특징으로 하는 방법.
[청구항 238]
청구항 215에 있어서, 상기 인체 해부학적 구조를 상기 3차원적 가상 모델에 등록하는 것은 상기 3차원적 가상 모델의 위치에 해당하는 소정의 위치에 상기 인체 해부학적 구조를 고정적으로 유지하는 것을 포함함을 특징으로 하는 방법.
[청구항 239]
청구항 238에 있어서, 상기 인체 해부학적 구조는 상기 인체 해부학적 구조가 고정적이라는 것을 소프트웨어 인터페이스가 확인할 때까지 고정적으로 유지됨을 특징으로 하는 방법.
[청구항 240]
청구항 239에 있어서, 상기 소프트웨어 인터페이스는 상기 제 1 및 제 2 관성 측정 장치로부터의 신호를 수신하고, 그리고 상기 소프트웨어 인터페이스는 상기 제 1 및 제 2 관성 측정 장치의 위치가 비교적 변함없음을 확인함을 특징으로 하는 방법.
[청구항 241]
청구항 239에 있어서, 상기 소프트웨어 인터페이스는 상기 제 1 및 제 2 관성 측정 장치로부터 그리고 상기 인체 해부학적 구조에 장착된 초광대역 센서로부터의 신호를 수신하고, 상기 소프트웨어 인터페이스는 상기 제 1 및 제 2 관성 측정 장치의 위치를 확인하고, 상기 초광대역 센서는 비교적 변함없음을 특징으로 하는 방법.
[청구항 242]
청구항 215에 있어서, 상기 인체 해부학적 구조를 상기 3차원적 가상 모델에 등록하는 것은 상기 제 1 및 제 2 관성 측정 장치를 서로에 대하여 등록하는 것을 포함함을 특징으로 하는 방법.
[청구항 243]
청구항 215에 있어서:
상기 인체 해부학적 구조를 3차원적 공간에서 동적으로 추적하기 위하여, 상기 인체 해부학적 구조에 장착된 제 1 및 제 2 관성 측정 장치로부터 신호를 수신하는 것은 3차원적 공간에서 상기 제 1 및 제 2 관성 측정 장치의 위치를 알기 위하여 초광대역 추적 시스템의 추적 센서를 이용하는 것을 포함하고, 그리고
상기 인체 해부학적 구조를 상기 3차원적 가상 모델에 등록하는 것은 상기 추적 센서를 서로에 대하여 등록하는 것을 포함함을 특징으로 하는 방법.
[청구항 244]
청구항 215에 있어서, 상기 인체 해부학적 구조를 3차원적 공간에서 동적으로 추적하기 위하여, 상기 인체 해부학적 구조에 장착된 제 1 및 제 2 관성 측정 장치로부터 신호를 수신하기 이전에 상기 제 1 및 제 2 관성 측정 장치를 캘리브레이션하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 245]
청구항 215에 있어서, 상기 인체 해부학적 구조는 인체 관절이며, 상기 인체 관절로 하여금 축회전, 외측 구부림, 및 굴곡-신장을 수행하도록 하는 단계를 더욱 포함하며, 여기에서 건강한 상태와 병적인 상태 사이의 차별화를 위하여 진단이 발생될 수 있음을 특징으로 하는 방법.
[청구항 246]
청구항 215에 있어서, 움직임 테스트에 즉각 대응하여, 동적 움직임으로 상기 시각적으로 디스플레이되는 3차원적 가상 모델을 관찰하고, 이에 즉각 대응하는 상기 인체 해부학적 구조의 상태를 진단하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 247]
청구항 215에 있어서, 움직임 테스트에 즉각 대응하여, 동적 움직임으로 상기 시각적으로 디스플레이되는 3차원적 가상 모델을 관찰하고, 움직임 테스트를 실시간으로 수량화하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 248]
청구항 215에 있어서, 움직임 테스트에 즉각 대응하여, 동적 움직임으로 상기 시각적으로 디스플레이되는 3차원적 가상 모델을 관찰하고, 상기 동적 움직임으로부터 추출된 운동학적 추적 정보를 수술 플래너의 일부로서 이용하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 249]
청구항 215에 있어서, 상기 제 1 및 제 2 관성 측정 장치 각각은 전원, 전원, 프로세서, 및 무선 송신기를 포함함을 특징으로 하는 방법.
[청구항 250]
수술용 네비게이션 준비 방법으로서:
단일의 위치 및 방향으로만 환자의 제 1 뼈의 표면에 정밀하게 매칭되도록 하기 위하여 상기 환자의 제 1 뼈의 표면에 대한 네거티브를 포함하는 제 1 환자-맞춤형 초기화 장치를 장착함으로써 제 1 관성 측정 장치를 상기 환자의 제 1 뼈에 등록하는 단계로 이루어지고, 여기에서 상기 제 1 환자-맞춤형 초기화 장치는 또한 상기 제 1 관성 측정 장치를 포함하고, 상기 제 1 관성 측정 장치는 다수의 자이로스코프, 다수의 가속도계, 및 다수의 자력계로 이루어짐을 특징으로 하는 수술용 네비게이션 준비 방법.
[청구항 251]
청구항 250에 있어서, 단일의 위치 및 방향으로만 환자의 제 2 뼈의 표면에 정밀하게 매칭되도록 하기 위하여 상기 환자의 제 2 뼈의 표면에 대한 네거티브를 포함하는 제 2 환자-맞춤형 초기화 장치를 장착함으로써 제 2 관성 측정 장치를 상기 환자의 제 2 뼈에 등록하는 단계를 더욱 포함하며, 여기에서 상기 제 2 환자-맞춤형 초기화 장치는 또한 상기 제 2 관성 측정 장치를 포함하고, 상기 제 2 관성 측정 장치는 다수의 자이로스코프, 다수의 가속도계, 및 다수의 자력계로 이루어짐을 특징으로 하는 방법.
[청구항 252]
청구항 250에 있어서, 임플란트 가이드를 상기 환자의 제 1 뼈의 절제된 일부에 장착함으로써 제 2 관성 측정 장치를 상기 환자의 제 1 뼈에 등록하는 단계를 더욱 포함하며, 여기에서 상기 회전 가이드는 또한 상기 제 2 관성 측정 장치를 포함하고, 상기 제 2 관성 측정 장치는 다수의 자이로스코프, 다수의 가속도계, 및 다수의 자력계로 이루어짐을 특징으로 하는 방법.
[청구항 253]
청구항 252에 있어서, 상기 제 1 및 제 2 관성 측정 장치로부터의 출력을 이용하여 상기 환자의 제 1 뼈에 대하여 상기 임플란트 가이드의 위치를 결정하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 254]
청구항 252에 있어서, 상기 환자의 제 1 뼈에 대한 상기 임플란트 가이드의 위치가 소정의 수술 계획에 일치함을 검증하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 255]
청구항 253에 있어서, 홀 배치를 위한 템플릿으로서 상기 임플란트 가이드를 이용하여 상기 환자의 뼈에 홀을 드릴링하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 256]
청구항 253에 있어서, 표시 배치를 위한 템플릿으로서 상기 임플란트 가이드를 이용하여 상기 환자의 뼈에 표시를 마킹하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 257]
청구항 253에 있어서, 상기 제 1 및 제 2 관성 측정 장치로부터의 출력에 즉각 대응하여 상기 환자의 제 1 뼈에 대하여 상기 임플란트 가이드를 재위치시키는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 258]
청구항 253에 있어서, 상기 임플란트 가이드가 재위치됨에 따라, 실시간으로 이에 대응하고 재위치되는 상기 임플란트 가이드의 3차원적 가상 모델을 시각적으로 묘사하고, 상기 환자의 제 1 뼈의 상기 절제된 부분이 재위치됨에 따라, 실시간으로 이에 대응하고 재위치되는 상기 환자의 제 1 뼈의 상기 절제된 부분의 3차원적 가상 모델을 시각적으로 묘사하는 단계를 더욱 포함하며, 여기에서 상기 임플란트 가이드 및 상기 절제된 부분의 3차원적 가상 모델의 상대 위치는 상기 절제된 부분에 대하여 상기 임플란트 가이드의 실제 위치를 복제함을 특징으로 하는 방법.
[청구항 259]
청구항 253에 있어서, 소정의 수술 계획에 일치하는 상기 환자의 제 1 뼈에 대하여 상기 임플란트 가이드가 정확하게 위치됨을 보장하기 위하여 상기 임플란트 가이드에 관련된 인디케이터를 시각적으로 묘사하는 단계를 더욱 포함함을 특징으로 하는 방법.
[청구항 260]
청구항 250 내지 청구항 259 중 어느 한 항에 있어서, 상기 관성 측정 장치를 상기 환자의 뼈에 장착하기 이전에 각각의 관성 측정 장치를 캘리브레이션하는 단계를 더욱 포함함을 특징으로 하는 방법.
[요약서]
[요약]
1차 프로세서에 통신 결합된 신호 수신기로 이루어지는 수술용 네비게이션 시스템으로서, 상기 1차 프로세서는 수술용 공구에 장착된 관성 측정 장치의 3차원적 위치의 변화를 계산하기 위하여 순차적인 몬테 카를로 알고리즘을 이용하도록 프로그램되고, 상기 프로세서는 다수의 수술용 공구 각각에 대하여 특유한 도구 데이터를 저장하는 제 1 메모리 및 인체 특징의 3차원적 모델을 구성하기에 충분한 모델 데이터를 저장하는 제 2 메모리에 통신 결합되며, 상기 1차 프로세서는 상기 인체 특징에 대하여 상기 수술용 공구의 3차원적 위치에 대한 시각적 피드백을 제공하는 디스플레이에 통신 결합됨을 특징으로 하는 수술용 네비게이션 시스템.
[도면]
[도 1]
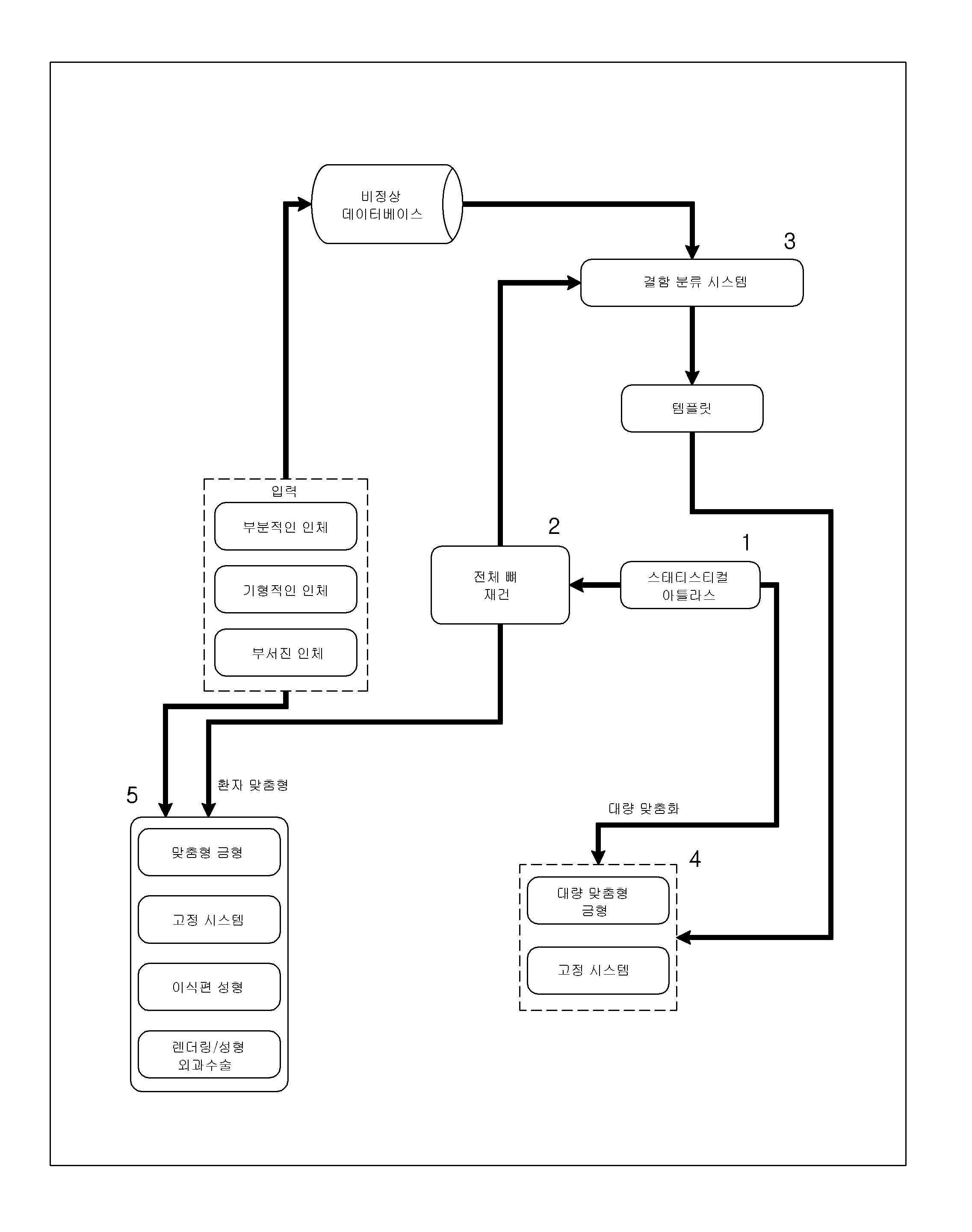
[도 2]

[도 3]

[도 4]

[도 5]

[도 6]

[도 7]

[도 8]

[도 9]

[도 10]

[도 11]

[도 12]

[도 13]

[도 14]

[도 15]

[도 16]

[도 17]

[도 18]

[도 19]

[도 20]

[도 21]

[도 22]

[도 23]

[도 24]

[도 25]

[도 26]

[도 27]

[도 28]

[도 29]

[도 30]

[도 31]

[도 32]

[도 33]

[도 34]

[도 35]

[도 36]

[도 37]

[도 38]

[도 39]

[도 40]

[도 41]

[도 42]

[도 43]

[도 44]

[도 45]

[도 46]

[도 47]

[도 48]

[도 49]

[도 50]

[도 51]

[도 52]

[도 53]

[도 54]

[도 55]

[도 56]

[도 57]

[도 58]

[도 59]

[도 60]

[도 61]

[도 62]

[도 63]

[도 64]

[도 65]

[도 66]

[도 67]

[도 68]

[도 69]

[도 70]

[도 71]
[도 72]

[도 73]

[도 74]

[도 75]

[도 76]

[도 77]

[도 78]

[도 79]

[도 80]

[도 81]

[도 82]

[도 83]

[도 84]

[도 85]

[도 86]

[도 87]

[도 88]

[도 89]

[도 90]

[도 91]

[도 92]

[도 93]

[도 94]

[도 95]

[도 96]

[도 97]

[도 98]

[도 99]

[도 100]

[도 101]

[도 102]

[도 103]

[도 104]

[도 105]

[도 106]

[도 107]

[도 108]

[도 109]

[도 110]

[도 111]

[도 112]

[도 113]

[도 114]

[도 115]

[도 116]

[도 117]

[도 118]

[도 119]

[도 120]

[도 121]

[도 122]

[도 123]

[도 124]

[도 125]

[도 126]

[도 127]

[도 128]

[도 129]

[도 130]

[도 131]

[도 132]

[도 133]

[도 134]

[도 135]

[도 136]

[도 137]

[도 138]

[도 139]

[도 140]

[도 141]

[도 142]

[도 143]

[도 144]

[도 145]

[도 146]

[도 147]

[도 148]

[도 149]

[도 150]

[도 151]

[도 152]

[도 153]

[도 154]

[도 155]

[도 156]

[도 157]

[도 158]

[도 159]

[도 160]

[도 161]

[도 162]

[도 163]

[도 164]

[도 165]

[도 166]

[도 167]

[도 168]

[도 169]

[도 170]

[도 171]

[도 172]

[도 173]

[도 174]

[도 175]

[도 176]

[도 177]

[도 178]

[도 179]

[도 180]

[도 181]

[도 182]

[도 183]

[도 184]

[도 185]

[도 186]

[도 187]

[도 188]

Claims (22)
- 관성 측정 유닛 캘리브레이션 방법으로서,
정지 상태의 상기 관성 측정 유닛으로부터 데이터를 수집하는 제 1 단계와;
상기 관성 측정 유닛의 세 직교축을 중심으로 상기 관성 측정 유닛을 재위치시키면서 상기 관성 측정 유닛으로부터 데이터를 수집하는 제 2 단계와;
상기 제 1 단계 및 상기 제 2 단계에서 수집된 데이터를 사용하여 복수의 자이로스코프를 캘리브레이션하는 단계와;
상기 제 1 단계 및 상기 제 2 단계에서 수집된 데이터를 사용하여 복수의 자력계를 캘리브레이션하는 단계와;
상기 제 1 단계 및 상기 제 2 단계에서 수집된 데이터를 사용하여 복수의 가속도계를 캘리브레이션하는 단계를 포함하되,
상기 복수의 자력계를 캘리브레이션하는 단계는 왜곡 검출용 파라미터를 추출하고 상기 추출된 파라미터를 사용하여 자기 왜곡이 상기 관성 측정 유닛의 국소장 내에 존재하는지 여부를 결정하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법. - 청구항 1에 있어서, 왜곡 검출용 파라미터를 추출하는 행위는 하기 가정들 중 적어도 하나를 채택하는 관성 측정 유닛 캘리브레이션 방법:
(1) 상기 관성 측정 유닛의 움직임은 상기 관성 측정 유닛을 구성하는 상기 복수의 가속도계, 상기 복수의 자이로스코프 및 상기 복수의 자력계 모두에 의해 검출 가능하다;
(2) 상기 복수의 자력계의 각도 및 길이는 대략 동일한 값을 가진다;
(3) 복수의 자력계 벡터 각각은 크기가 대략 1이다;
(4) 캘리브레이션된 자력계 벡터와 캘리브레이션된 가속도계 벡터 사이의 각도는 불변이어야 한다;
(5) 상기 복수의 자력계의 캘리브레이션후 반경은 대략 1이다;
(6) 상기 복수의 자력계 중 서로 다른 자력계를 사용하여 계산된 쿼터니온은 대략 동일하다. - 청구항 2에 있어서, 상기 관성 측정 유닛의 움직임은 상기 관성 측정 유닛을 구성하는 상기 복수의 가속도계, 상기 복수의 자이로스코프 및 상기 복수의 자력계 모두에 의해 검출 가능하다는 가정으로부터의 일탈시, 움직임 이상 결정이 내려지는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 3에 있어서, 하기 가정들 중 어느 하나로부터의 일탈시 자기 이상 결정이 내려지는 관성 측정 유닛 캘리브레이션 방법:
(2) 상기 복수의 자력계의 각도 및 길이는 대략 동일한 값을 가진다;
(3) 복수의 자력계 벡터 각각은 크기가 대략 1이다;
(4) 캘리브레이션된 자력계 벡터와 캘리브레이션된 가속도계 벡터 사이의 각도는 불변이어야 한다;
(5) 상기 복수의 자력계의 캘리브레이션후 반경은 대략 1이다;
(6) 상기 복수의 자력계 중 서로 다른 자력계를 사용하여 계산된 쿼터니온은 대략 동일하다. - 청구항 1에 있어서, 상기 복수의 자이로 스코프를 캘리브레이션하는 단계는 산술 평균에 의해 각각의 자이로스코프의 바이어스를 결정하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 임의의 강성 왜곡의 존재 여부 및 임의의 강성 왜곡의 존재 여부 중 적어도 하나를 결정하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 6에 있어서, 임의의 강성 왜곡의 존재 여부 및 임의의 강성 왜곡의 존재 여부 중 적어도 하나를 결정하는 단계는 상기 복수의 자력계로부터 수집된 데이터에 다차원 타원체 피팅 함수를 활용하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 기준 정렬선을 통해 상기 자력계들 사이의 정렬 차를 처리하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 새로운 기준 정렬선에 맞추어 상기 복수의 자력계를 캘리브레이션하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 가속도계를 캘리브레이션하는 단계는 상기 복수의 가속도계로부터 수집된 상기 데이터에 다차원 타원체 피팅 함수를 적용하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자이로스코프를 캘리브레이션하는 단계는 왜곡 검출용 파라미터를 추출하고 상기 추출된 파라미터를 사용하여 움직임 이상의 존재 여부를 결정하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 가속도계를 캘리브레이션하는 단계는 상기 제 2 단계에서 상기 복수의 가속도계로부터 수집된 데이터가 상기 제 1 단계에서 상기 복수의 가속도계로부터 수집된 데이터보다 큰 움직임 값을 갖는지를 확인하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자이로스코프를 캘리브레이션하는 단계는 상기 제 2 단계에서 상기 복수의 자이로스코프로부터 수집된 데이터가 상기 제 1 단계에서 상기 복수의 자이로스코프로부터 수집된 데이터보다 큰 움직임 값을 갖는지를 확인하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 상기 제 2 단계에서 상기 복수의 자력계로부터 수집된 데이터가 상기 제 1 단계에서 상기 복수의 자력계로부터 수집된 데이터보다 큰 움직임 값을 갖는지를 확인하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 상기 복수의 자력계로부터 수집된 데이터에 다차원 타원체 피팅 함수를 적용하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 상기 복수의 자력계로부터 수집된 데이터로부터 배향 출력 쿼터니언을 계산하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 16에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 상기 계산된 배향 출력 쿼터니언 사이의 각도를 계산하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1에 있어서, 상기 복수의 자력계를 캘리브레이션하는 단계는 상기 복수의 자력계로부터 수집된 데이터에 자력계 반경 계산을 적용하여 자기 이상의 존재 여부를 결정하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 18에 있어서, 자기 이상이 존재할 경우, 자기 이상의 강도를 계산하는 단계를 포함하는 관성 측정 유닛 캘리브레이션 방법.
- 청구항 1 내지 19 중 어느 한 항의 방법에 따라 캘리브레이션되는 관성 측정 유닛.
- 청구항 1 내지 19 중 어느 한 항의 방법에 따라 캘리브레이션되는 수술용 내비게이션 시스템의 일부로서 통합되는 관성 측정 유닛.
- 청구항 1 내지 19 중 어느 한 항의 방법에 따라 캘리브레이션되는 수술용 내비게이션에 사용하도록 구성되는 관성 측정 유닛.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562268175P | 2015-12-16 | 2015-12-16 | |
| US62/268,175 | 2015-12-16 | ||
| PCT/US2016/067387 WO2017106794A1 (en) | 2015-12-16 | 2016-12-16 | Imu calibration |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180103903A true KR20180103903A (ko) | 2018-09-19 |
| KR102321695B1 KR102321695B1 (ko) | 2021-11-03 |
Family
ID=59057715
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020187020445A KR102321695B1 (ko) | 2015-12-16 | 2016-12-16 | 관성 측정 유닛 캘리브레이션(imu calibration) |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US10852383B2 (ko) |
| EP (2) | EP3795109B1 (ko) |
| JP (1) | JP6971234B2 (ko) |
| KR (1) | KR102321695B1 (ko) |
| CN (1) | CN109069067B (ko) |
| AU (3) | AU2016369607B2 (ko) |
| CA (2) | CA3008479C (ko) |
| ES (2) | ES2869524T3 (ko) |
| WO (1) | WO2017106794A1 (ko) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110794960B (zh) | 2014-12-08 | 2024-02-06 | 罗希特·塞思 | 可穿戴无线hmi装置 |
| US9532845B1 (en) | 2015-08-11 | 2017-01-03 | ITKR Software LLC | Methods for facilitating individualized kinematically aligned total knee replacements and devices thereof |
| CN109069067B (zh) | 2015-12-16 | 2022-04-12 | 穆罕默德·R·马赫福兹 | Imu校准 |
| US20210220054A1 (en) * | 2018-06-13 | 2021-07-22 | New York Society for the Relief of the Ruptured and Crippled, maintaining the Special Surgery | Evaluation of instability using imaging and modeling following arthroplasty |
| FR3082612B1 (fr) * | 2018-06-13 | 2021-01-01 | Sysnav | Procede de calibration d'un gyrometre equipant un objet |
| US10852143B2 (en) | 2018-06-27 | 2020-12-01 | Rohit Seth | Motion sensor with drift correction |
| US10539644B1 (en) | 2019-02-27 | 2020-01-21 | Northern Digital Inc. | Tracking an object in an electromagnetic field |
| CN110530396A (zh) * | 2019-07-31 | 2019-12-03 | 苏州浪潮智能科技有限公司 | 一种陀螺仪传感器误差的处理方法及设备 |
| CN110567491B (zh) * | 2019-08-29 | 2021-10-08 | 青岛歌尔智能传感器有限公司 | 惯性导航系统的初始对准方法、装置及电子设备 |
| WO2021087483A1 (en) * | 2019-10-31 | 2021-05-06 | BabySteps Orthopedics Inc. | Predictive modeling platform for serial casting to correct orthopedic deformities |
| CN111506966B (zh) * | 2020-04-20 | 2024-03-22 | 成都飞机工业(集团)有限责任公司 | 工艺协调模型的判别方法、装置、电子设备和存储介质 |
| TWI753412B (zh) * | 2020-04-27 | 2022-01-21 | 長庚醫療財團法人林口長庚紀念醫院 | 產生用於自動定位出定位點的模型的方法、骨骼狀態分析方法及電子系統 |
| US11621086B2 (en) | 2020-06-04 | 2023-04-04 | Episurf Ip-Management Ab | Customization of individualized implant |
| CN112013876A (zh) * | 2020-08-28 | 2020-12-01 | 上海爱观视觉科技有限公司 | Imu数据标定方法、终端设备及计算机可读存储介质 |
| CN111879971A (zh) * | 2020-09-28 | 2020-11-03 | 蘑菇车联信息科技有限公司 | 一种imu中加速度计的标定方法及相关装置 |
| CN112629565B (zh) * | 2021-03-08 | 2021-06-01 | 中国人民解放军国防科技大学 | 像机与惯性测量单元旋转关系校准方法、装置和设备 |
| CN113406646B (zh) * | 2021-06-18 | 2023-03-31 | 北京师范大学 | 基于多方向超声测距及imu进行三维定位的方法和设备 |
| CN115208760B (zh) * | 2022-07-14 | 2024-02-27 | 上海移为通信技术股份有限公司 | 运动检测芯片的配置方法、装置及介质 |
| CN116862985B (zh) * | 2023-09-01 | 2023-11-10 | 江苏中安建设集团有限公司 | 一种土地高精度定位电子信息化监测方法 |
| CN117589203A (zh) * | 2024-01-18 | 2024-02-23 | 陕西太合智能钻探有限公司 | 一种陀螺仪标定方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0996534A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| US20110106477A1 (en) * | 2009-11-04 | 2011-05-05 | Qualcomm Incorporated | Calibrating multi-dimensional sensor for offset, sensitivity, and non-orthogonality |
| US20130217998A1 (en) * | 2009-02-02 | 2013-08-22 | Jointvue, Llc | Motion Tracking System with Inertial-Based Sensing Units |
| WO2015031072A1 (en) * | 2013-08-27 | 2015-03-05 | Andrew Llc | Alignment determination for antennas and such |
| WO2015089118A1 (en) * | 2013-12-09 | 2015-06-18 | Mahfouz Mohamed R | Bone reconstruction and orthopedic implants |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7432868B2 (en) | 2004-04-26 | 2008-10-07 | Spencer Webb | Portable antenna positioner apparatus and method |
| US7219033B2 (en) * | 2005-02-15 | 2007-05-15 | Magneto Inertial Sensing Technology, Inc. | Single/multiple axes six degrees of freedom (6 DOF) inertial motion capture system with initial orientation determination capability |
| IL167648A (en) * | 2005-03-24 | 2011-01-31 | Elbit Systems Ltd | Hybrid tracker |
| US20070032748A1 (en) * | 2005-07-28 | 2007-02-08 | 608442 Bc Ltd. | System for detecting and analyzing body motion |
| JP2007040762A (ja) * | 2005-08-01 | 2007-02-15 | Toyota Motor Corp | 光ジャイロ較正装置、光ジャイロを搭載するロボット及び光ジャイロ較正プログラム |
| US8000772B2 (en) * | 2005-10-19 | 2011-08-16 | Biosense Webster, Inc. | Metal immunity in a reverse magnetic system |
| US8634629B2 (en) | 2005-11-11 | 2014-01-21 | Hologic, Inc. | Estimating risk of future bone fracture utilizing three-dimensional bone density model |
| US20120209117A1 (en) * | 2006-03-08 | 2012-08-16 | Orthosensor, Inc. | Surgical Measurement Apparatus and System |
| FR2934043B1 (fr) * | 2008-07-18 | 2011-04-29 | Movea Sa | Procede d'estimation ameliore de l'orientation d'un objet et centrale d'attitude mettant en oeuvre un tel procede |
| US7912664B2 (en) * | 2008-09-11 | 2011-03-22 | Northrop Grumman Guidance And Electronics Company, Inc. | Self calibrating gyroscope system |
| US20110063167A1 (en) | 2009-09-15 | 2011-03-17 | Qualcomm Incorporated | Using magnetometer with a positioning system |
| US8766872B2 (en) | 2008-12-24 | 2014-07-01 | Enzo Dalmazzo | Autonomous wireless antenna sensor system |
| US8108171B2 (en) * | 2009-09-14 | 2012-01-31 | Honeywell International, Inc. | Systems and methods for calibration of gyroscopes and a magnetic compass |
| US8825426B2 (en) * | 2010-04-09 | 2014-09-02 | CSR Technology Holdings Inc. | Method and apparatus for calibrating a magnetic sensor |
| JP5540850B2 (ja) * | 2010-04-09 | 2014-07-02 | トヨタ自動車株式会社 | 姿勢推定装置、方法及びプログラム |
| WO2011162753A1 (en) * | 2010-06-23 | 2011-12-29 | Mako Sugical Corp. | Inertially tracked objects |
| KR20130143576A (ko) * | 2010-10-01 | 2013-12-31 | 힐크레스트 래보래토리스, 인크. | 중력 기준계에서의 장치에 부착된 움직임 센서 및 자력계의 측정치를 사용하여 장치의 요각을 추정하는 장치 및 방법 |
| US8577640B2 (en) * | 2011-08-17 | 2013-11-05 | Invensense, Inc. | Magnetometer bias and anomaly detector |
| US9141194B1 (en) * | 2012-01-04 | 2015-09-22 | Google Inc. | Magnetometer-based gesture sensing with a wearable device |
| US10132829B2 (en) * | 2013-03-13 | 2018-11-20 | Invensense, Inc. | Heading confidence interval estimation |
| US9854991B2 (en) * | 2013-03-15 | 2018-01-02 | Medtronic Navigation, Inc. | Integrated navigation array |
| US20150019159A1 (en) * | 2013-07-15 | 2015-01-15 | Honeywell International Inc. | System and method for magnetometer calibration and compensation |
| JP6373046B2 (ja) * | 2014-04-15 | 2018-08-15 | 株式会社パスコ | 携帯型撮影装置及び撮影プログラム |
| CN108137074B (zh) * | 2015-09-04 | 2021-12-03 | 看门人系统公司 | 轮式车的运动估计 |
| CN109069067B (zh) | 2015-12-16 | 2022-04-12 | 穆罕默德·R·马赫福兹 | Imu校准 |
| US10352962B2 (en) * | 2016-12-29 | 2019-07-16 | BioMech Sensor LLC | Systems and methods for real-time data quantification, acquisition, analysis and feedback |
| FR3069649B1 (fr) * | 2017-07-26 | 2021-01-01 | Sysnav | Procede de calibration d'un magnetometre |
-
2016
- 2016-12-16 CN CN201680079763.7A patent/CN109069067B/zh active Active
- 2016-12-16 WO PCT/US2016/067387 patent/WO2017106794A1/en active Application Filing
- 2016-12-16 EP EP20205982.0A patent/EP3795109B1/en active Active
- 2016-12-16 CA CA3008479A patent/CA3008479C/en active Active
- 2016-12-16 JP JP2018530694A patent/JP6971234B2/ja active Active
- 2016-12-16 KR KR1020187020445A patent/KR102321695B1/ko active IP Right Grant
- 2016-12-16 ES ES16876874T patent/ES2869524T3/es active Active
- 2016-12-16 CA CA3171029A patent/CA3171029A1/en active Pending
- 2016-12-16 ES ES20205982T patent/ES2931044T3/es active Active
- 2016-12-16 EP EP16876874.5A patent/EP3389490B1/en active Active
- 2016-12-16 AU AU2016369607A patent/AU2016369607B2/en active Active
-
2017
- 2017-07-31 US US15/664,342 patent/US10852383B2/en active Active
-
2019
- 2019-09-19 AU AU2019232853A patent/AU2019232853B2/en active Active
-
2020
- 2020-07-13 AU AU2020205220A patent/AU2020205220B2/en active Active
- 2020-09-16 US US17/022,488 patent/US11435425B2/en active Active
-
2022
- 2022-08-15 US US17/887,990 patent/US11946995B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0996534A (ja) * | 1995-09-29 | 1997-04-08 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| US20130217998A1 (en) * | 2009-02-02 | 2013-08-22 | Jointvue, Llc | Motion Tracking System with Inertial-Based Sensing Units |
| US20110106477A1 (en) * | 2009-11-04 | 2011-05-05 | Qualcomm Incorporated | Calibrating multi-dimensional sensor for offset, sensitivity, and non-orthogonality |
| WO2015031072A1 (en) * | 2013-08-27 | 2015-03-05 | Andrew Llc | Alignment determination for antennas and such |
| WO2015089118A1 (en) * | 2013-12-09 | 2015-06-18 | Mahfouz Mohamed R | Bone reconstruction and orthopedic implants |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3795109A1 (en) | 2021-03-24 |
| AU2019232853A1 (en) | 2019-10-10 |
| AU2016369607A1 (en) | 2018-07-12 |
| WO2017106794A1 (en) | 2017-06-22 |
| US10852383B2 (en) | 2020-12-01 |
| ES2869524T3 (es) | 2021-10-25 |
| JP6971234B2 (ja) | 2021-11-24 |
| US11435425B2 (en) | 2022-09-06 |
| US20210003655A1 (en) | 2021-01-07 |
| AU2020205220A1 (en) | 2020-07-30 |
| EP3389490B1 (en) | 2021-04-14 |
| JP2019509073A (ja) | 2019-04-04 |
| EP3389490A1 (en) | 2018-10-24 |
| CA3008479A1 (en) | 2017-06-22 |
| US11946995B2 (en) | 2024-04-02 |
| CA3171029A1 (en) | 2017-06-22 |
| EP3795109B1 (en) | 2022-09-14 |
| AU2016369607A2 (en) | 2018-08-02 |
| CA3008479C (en) | 2022-10-18 |
| CN109069067A (zh) | 2018-12-21 |
| US20220413081A1 (en) | 2022-12-29 |
| KR102321695B1 (ko) | 2021-11-03 |
| EP3389490A4 (en) | 2019-09-04 |
| AU2016369607B2 (en) | 2019-06-20 |
| CN109069067B (zh) | 2022-04-12 |
| US20180059204A1 (en) | 2018-03-01 |
| ES2931044T3 (es) | 2022-12-23 |
| AU2019232853B2 (en) | 2020-07-30 |
| AU2020205220B2 (en) | 2022-03-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| AU2021232696B2 (en) | Cross bone reconstruction and orthopedic implants | |
| KR102321695B1 (ko) | 관성 측정 유닛 캘리브레이션(imu calibration) | |
| KR20170058361A (ko) | 뼈 재건 및 정형외과용 임플란트 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| A302 | Request for accelerated examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |