KR20180098174A - 가상현실 기반 방사선학 실습 장치 및 방법 - Google Patents
가상현실 기반 방사선학 실습 장치 및 방법 Download PDFInfo
- Publication number
- KR20180098174A KR20180098174A KR1020180022591A KR20180022591A KR20180098174A KR 20180098174 A KR20180098174 A KR 20180098174A KR 1020180022591 A KR1020180022591 A KR 1020180022591A KR 20180022591 A KR20180022591 A KR 20180022591A KR 20180098174 A KR20180098174 A KR 20180098174A
- Authority
- KR
- South Korea
- Prior art keywords
- virtual
- hmd
- hand
- image
- main server
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/163—Wearable computers, e.g. on a belt
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
- G09B23/286—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine for scanning or photography techniques, e.g. X-rays, ultrasonics
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/0093—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00 with means for monitoring data relating to the user, e.g. head-tracking, eye-tracking
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/017—Head mounted
- G02B27/0172—Head mounted characterised by optical features
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1686—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being an integrated camera
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F1/00—Details not covered by groups G06F3/00 - G06F13/00 and G06F21/00
- G06F1/16—Constructional details or arrangements
- G06F1/1613—Constructional details or arrangements for portable computers
- G06F1/1633—Constructional details or arrangements of portable computers not specific to the type of enclosures covered by groups G06F1/1615 - G06F1/1626
- G06F1/1684—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675
- G06F1/1694—Constructional details or arrangements related to integrated I/O peripherals not covered by groups G06F1/1635 - G06F1/1675 the I/O peripheral being a single or a set of motion sensors for pointer control or gesture input obtained by sensing movements of the portable computer
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/012—Head tracking input arrangements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G06F3/013—Eye tracking input arrangements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/0304—Detection arrangements using opto-electronic means
- G06F3/0325—Detection arrangements using opto-electronic means using a plurality of light emitters or reflectors or a plurality of detectors forming a reference frame from which to derive the orientation of the object, e.g. by triangulation or on the basis of reference deformation in the picked up image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a three-dimensional [3D] space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0481—Interaction techniques based on graphical user interfaces [GUI] based on specific properties of the displayed interaction object or a metaphor-based environment, e.g. interaction with desktop elements like windows or icons, or assisted by a cursor's changing behaviour or appearance
- G06F3/04815—Interaction with a metaphor-based environment or interaction object displayed as three-dimensional [3D], e.g. changing the user viewpoint with respect to the environment or object
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/048—Interaction techniques based on graphical user interfaces [GUI]
- G06F3/0484—Interaction techniques based on graphical user interfaces [GUI] for the control of specific functions or operations, e.g. selecting or manipulating an object, an image or a displayed text element, setting a parameter value or selecting a range
- G06F3/04842—Selection of displayed objects or displayed text elements
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T15/00—Three-dimensional [3D] image rendering
- G06T15/08—Volume rendering
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T17/00—Three-dimensional [3D] modelling for computer graphics
- G06T17/20—Finite element generation, e.g. wire-frame surface description, tesselation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating three-dimensional [3D] models or images for computer graphics
- G06T19/003—Navigation within 3D models or images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating three-dimensional [3D] models or images for computer graphics
- G06T19/20—Editing of three-dimensional [3D] images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B23/00—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes
- G09B23/28—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine
- G09B23/283—Models for scientific, medical, or mathematical purposes, e.g. full-sized devices for demonstration purposes for medicine for dentistry or oral hygiene
-
- H04N5/225—
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/01—Head-up displays
- G02B27/0101—Head-up displays characterised by optical features
- G02B2027/0138—Head-up displays characterised by optical features comprising image capture systems, e.g. camera
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10072—Tomographic images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- General Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- Human Computer Interaction (AREA)
- Computer Hardware Design (AREA)
- Optics & Photonics (AREA)
- Health & Medical Sciences (AREA)
- Software Systems (AREA)
- Computer Graphics (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Pure & Applied Mathematics (AREA)
- Business, Economics & Management (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- Chemical & Material Sciences (AREA)
- Mathematical Physics (AREA)
- Mathematical Optimization (AREA)
- Mathematical Analysis (AREA)
- Medicinal Chemistry (AREA)
- Computational Mathematics (AREA)
- Algebra (AREA)
- Radar, Positioning & Navigation (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Remote Sensing (AREA)
- Geometry (AREA)
- Architecture (AREA)
- Epidemiology (AREA)
- Public Health (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Processing Or Creating Images (AREA)
- Measuring And Recording Apparatus For Diagnosis (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
Abstract
본 발명의 가상 방사선학 실습 장치는, 실습자의 머리에 장착되며, HMD 영상출력부로, 가상 방사선학 실습을 위해, 가상 방사선 장치를 포함하는 영상이 출력되는, HMD 머리장착부; 실습자의 손에 장착되며, 영상 상에 가상 방사선 장치를 조작하기 위해, 실습자의 손이 움직일때, 실습자의 손 움직임신호를 검출하는 손 움직임 검출부를 포함하는, HMD 손장착부; HMD 손장착부로부터 손 움직임신호를 수신하여 메인서버로 전송하고, 메인서버로 부터 수신된 영상을 HMD 머리장착부로 전송하는, HMD 제어부; HMD 제어부로부터 수신한 손 움직임신호를 수신하고, 손 움직임 신호에 따라서, 영상상에서, 실습자의 가상의 손인, 손 움직임 표시자가 움직이며, 움직여진 손 움직임 표시자를 포함하는 영상을, HMD 제어부로 전송하는 메인서버;를 포함하여 이루어진 것을 특징으로 한다.
Description
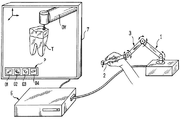
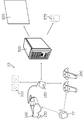
도 2는 본 발명의 가상현실 기반 방사선학 실습 장치를 개략적으로 설명하기 위한 모식도이다.
도 3은 도 2의 가상현실 기반 방사선학 실습 장치의 구동방법을 개략적으로 설명하기 위한 모식도이다.
도 4는 도 2의 HMD 손장착부의 일예이다.
도 5는 도 2의 가상현실 기반 방사선학 실습 장치의 구성을 설명하기 위한 블럭도이다.
도 6은 도 5의 메인서버의 연산처리부의 기본 동작을 설명하기 위한 흐름도이다.
도 7은 방사선 촬영장치를 이용한 실습모드에서, 도 5의 메인서버의 연산처리부의 동작을 설명하기 위한 흐름도이다.
도 8은 가상실습환경에서 물건을 잡을 때에 대한, 도 5의 메인서버의 연산처리부의 동작을 설명하기 위한 흐름도이다.
도 9는 도 5의 메인서버의 연산처리부에서, 가상 실습공간에서 텔레포트(실습자의 위치 이동) 처리과정을 나타내는 흐름도이다.
도 10은 본 발명의 가상 방사선학 실습 장치를 이용한 가상 실습시, 방사선 촬영 결과화면의 연산과정의 일예를 설명하는 흐름도이다.
도 11은 본 발명의 가상 방사선학 실습 장치를 이용한 가상 실습시, 방사선 촬영 결과화면의 연산과정의 다른 일예를 설명하는 흐름도이다.
도 12 및 도 13은 도 2의 가상현실 기반 방사선학 실습 장치에서, 가상 방사선 장치가 디지털 엑스레이 기기인 경우의 모식도이다.
도 14 및 도 15는 도 2의 가상현실 기반 방사선학 실습 장치에서, 가상 방사선 장치가 혈관조영술 기기인 경우의 모식도이다.
도 16은 도 2의 가상현실 기반 방사선학 실습 장치에서, 가상 방사선 장치가 CT 스캐너인 경우의 모식도이다.
30 : 가상 환자 50 : 가상 방사선 장치
70 : 손 움직임 표시자 76 : HMD 세트
77 : 베이스 스테이션부 100 : HMD 머리장착부
110 : 머리움직임 검출부 120 : HMD 영상출력부
130 : 이어폰 150 : HMD제어부
160 : 머리 움직임 신호 전처리부 170 : 영상출력 제어부
177 : 음향출력 제어부 200 : HMD 손장착부
210 : 손움직임 검출부 215 : 전후좌우 이동 버튼
217 : 트리거 버튼 220 : 입력버튼
230 : 진동발생부 237: 전원 온/오프 버튼
235 : 메뉴버튼 250 : 제1 데이터송수신부
260 : 손 움직임 신호 전처리부 270 : 입력버튼신호 전처리부
280 : 진동출력 제어부 300 : 카메라부
310 : 영상신호 전처리부 350 : HMD 제어부의 연산처리부
370 : 제2 데이터송수신부 500 : 메인서버
510 : 데이터 송수신부 550 : 메인서버의 연산처리부
560 : 데이터베이스 570 : 메모리부
575 : 스피커부 600 : 디스플레이부
Claims (23)
- 실습자의 머리에 장착되며, HMD(Head Mounted Display) 영상출력부로, 가상 방사선학 실습을 위해, 가상 방사선 장치를 포함하는 영상이 출력되는, HMD 머리장착부;
실습자의 손에 장착되며, 영상 상에 가상 방사선 장치를 조작하기 위해, 실습자의 손이 움직일때, 실습자의 손 움직임신호를 검출하는 손 움직임 검출부를 포함하는, HMD 손장착부;
HMD 손장착부로부터 손 움직임신호를 수신하여 메인서버로 전송하고, 메인서버로 부터 수신된 영상을 HMD 머리장착부로 전송하는, HMD 제어부;
HMD 제어부로부터 수신한 손 움직임신호를 수신하고, 손 움직임 신호에 따라서, 영상상에서, 실습자의 가상의 손인, 손 움직임 표시자가 움직이며, 움직여진 손 움직임 표시자를 포함하는 영상을, HMD 제어부로 전송하는 메인서버;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제1항에 있어서,
HMD 머리장착부는, 메인서버로부터 HMD 제어부를 통해 수신되는 음향신호를 출력하는 이어폰;
을 더 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제2항에 있어서, HMD 손장착부는,
영상에서, 손 움직임 표시자와 충돌된 가상의 물체가, 상기 영상 상에서 손 움직임 표시자로 잡고 있음을 나타내게 하는, 트리거 버튼;
을 더 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제3항에 있어서,
손 움직임 표시자와 충돌된 가상의 물체의 부분이 가동부분인 경우에, 메인서버는, 트리거 버튼으로부터 HMD 제어부를 통해 수신된 트리거 버튼 신호가 수신되면, 영상 상에서, 가상의 물체의 가동부분이, 손 움직임 표시자의 움직임에 따라, 움직이도록 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제4항에 있어서, HMD 손장착부는,
영상상에서 손 움직임 표시자와 가상의 물체가 충돌될 때, 진동을 출력하는 진동발생부;
를 더 포함하고 있는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제5항에 있어서, HMD 머리장착부는
실습자의 머리 움직임을 검출하는 머리 움직임 검출부;
를 더 포함하고 있는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제6항에 있어서,
메인서버는 머리 움직임 검출부로부터 HMD 제어부를 통해 머리움직임 신호를 수신하고, 머리움직임 신호에 따라, 영상의 시점을 변경한 영상을 생성하여, HMD 제어부로 전송하는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제7항에 있어서,
실습자를 촬영하여 위치 트래킹 영상을 생성하는 카메라부;를 더 포함하는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제8항에 있어서,
메인서버는 카메라부로부터 HMD 제어부를 통해 수신한 위치 트래킹 영상, 머리움직임 신호, 손 움직임 신호에 따라, 영상을 생성하여 HMD 제어부로 전송하는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제8항에 있어서,
HMD 손장착부는, 전후좌우 이동 버튼(트랙패드)를 더 포함하며,
메인서버는, 전후좌우 이동 버튼으로부터 출력된 전후좌우 이동 버튼 신호가, HMD 제어부를 통해 수신되면, 영상 상에서, 머리움직임 신호에 의한 방향으로, 실습자가 이동함에 따라, 실습자에게 보이는 영상을 생성하여, HMD 제어부로 전송하는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제10항에 있어서,
머리움직임 신호, 위치 트래킹 영상, 손움직임 신호는, 베이스 스테이션부의 적외선 발생에 동기되어 검출된 신호인 것을 특징으로 하는, 가상 방사선학 실습 장치. - 제1항 내지 제11항 중 어느 한 항에 있어서,
실습자가, 가상 방사선 장치 또는 가상 환자를 설정하도록하는 설정부를 더 포함하는 것을 특징으로 하는, 가상 방사선학 실습 장치. - 실습자의 머리에 장착된 HMD(Head Mounted Display) 머리장착부의 HMD 영상출력부가, 가상 방사선학 실습을 위해, 가상 방사선 장치를 포함하는 영상을 출력하고,
실습자의 손에 장착된 HMD 손장착부의 손 움직임 검출부는, 영상 상에 가상 방사선 장치를 조작하기 위해, 실습자의 손이 움직일때, 실습자의 손 움직임신호를 검출하여, HMD 제어부를 통해 메인서버의 연산처리부로 전송하고,
메인서버의 연산처리부는 수신된 손 움직임 신호에 따라서, 영상 상에서, 실습자의 가상의 손인, 손 움직임 표시자가 움직이며, 움직여진 손 움직임 표시자를 포함하는 영상을, HMD 제어부를 통해 HMD 머리장착부의 HMD 영상출력부로 출력하는 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 메인서버의 연산처리부는, HMD 머리장착부에 장착된 머리움직임 검출부로부터 검출된 머리움직임 신호와, HMD 손장착부의 손 움직임 검출부로부터 검출된 손움직임 신호와, 카메라부가 실습자를 촬영하여 생성한 위치 트래킹 영상을, HMD 제어부를 통해, 수신하는 신호수신단계;
메인서버의 연산처리부는 머리움직임 신호에 따라 실습자의 시야를 결정하고, 기설정된 가상실습환경의 영상을 출력하되, 실습자의 시야에 따라 조정하여 출력하고, 가상실습환경의 영상에, 손움직임 신호에 따른 위치 또는 위치 트래킹 영상신호에 따른 손 위치에, 실습자의 가상의 손인, 손움직임 표시자를 표시하는, 시야조정 및 손움직임 표시자 표시단계;
메인서버의 연산처리부는, HMD 손장착부의 입력버튼이 선택됨에 따른 입력버튼 신호가 수신되었는지 여부를 판단하고, 손움직임 표시자가 가상 방사선 장치와 충돌되었는지 여부를 판단하는, 상호적용 조건 만족여부 판단단계;
메인서버의 연산처리부는, 상호적용 조건 만족여부 판단단계에서, 입력버튼 신호가 입력되었다면, 입력버튼 신호에 따른 동작을 수행하고, 상호적용 조건 만족여부 판단단계에서, 손움직임 표시자가 가상 방사선 장치와 충돌되었다면, 진동출력 제어신호를 생성하여, HMD 제어부로 전송하는, 상호작용 실행단계;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 실습자의 손움직임 신호에 따라 움직이는, 손움직임 표시자의 움직임에 따라서, 메인서버의 연산처리부는, 영상 상에서, 촬상하기 위한 위치로 이동된 가상 환자의 촬상부위에게 가상 필름을 배치하고, 가상 방사선 촬영 장치의 위치와 각도를 조절하고, 가상 방사선 촬영 장치를 구동시켜 가상 촬영하는 실습을 진행하는, 실습진행단계;
실습진행단계 후, 손움직임 표시가 가상 결과화면 모니터와 충돌되었다면, 메인서버의 연산처리부는, 손움직임 표시자에 따라서, 가상환자에게서 제거한 필름을 가상 인상하여, 가상 결과화면 모니터에 디스플레이하는, 가상 실습결과 출력단계;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 제15항에 있어서,
실습진행단계 전에,
영상상에서, 실습자가 가상 방사선 촬영실로 이동함으로써, 메인서버의 연산처리부는, 가상 방사선 촬영실의 영상을 HMD 제어부를 통해 HMD 영상출력부로 전송하는, 가상 실습실 이동단계;
가상 실습실 이동단계 후, 메인서버의 연산처리부는, 환자선택 대화상자를 디스플레이하게 하고, 실습자가 설정한 가상 환자영상을, HMD 제어부를 통해 HMD 영상출력부로 전송하는, 가상 환자 설정단계;
를 더 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 메인서버의 연산처리부는, 영상상에서, 손움직임 표시자가 가상물체의 가동부분과 충돌하고, HMD 손장착부의 트리거 버튼으로부터, HMD 제어부를 통해, 트리거 버튼 신호가 수신되었다면, 실습자가 가상 물체를 잡으려고 한 것으로 판단하고, HMD 손장착부의 손 움직임 검출부로부터 손 움직임신호를 수신하여, 메모리부 저장하는, 손움직임 신호 수신단계;
메인서버의 연산처리부는, HMD 손장착부의 트리거 버튼으로부터 HMD 제어부를 통해 트리거 버튼 신호가 수신되었다면, HMD 손장착부의 손 움직임 검출부로부터 현재의 손 움직임신호를 수신하고, 전의 손움직임 신호와 비교하여, 가상 물체의 가동부분을 이동시키는, 가동부분 이동단계
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 메인서버의 연산처리부는, HMD 손장착부의 전후좌우 이동버튼(트랙패드)로부터 HMD 제어부를 통해 전후좌우 이동버튼신호가 수신되었는지를 판단하는, 전후좌우 이동버튼신호 수신여부 판단단계;
메인서버의 연산처리부는, 전후좌우 이동버튼 신호를 수신하였다면, HMD 손장착부의 손 움직임 검출부로부터의 손의 위치 및 각도값으로 이루어진 손 움직임신호를 수신하고, 손 움직임신호의 위치 및 각도에 따른 방향의 연장선 상에 지면과의 충돌지점을 계산하는, 지면 충돌지점 연산단계;
메인서버의 연산처리부는, HMD 제어부으로부터 머리의 위치 및 각도로 이루어진 머리움직임 신호를 수신하여, 실습자의 머리가 향하고 있는 방향을 결정하는, 머리움직임 신호 수신단계;
메인서버의 연산처리부는, 충돌지점 중심으로, 텔레포트 지점을 표시하고, 사용자의 바라보는 방향을 표시하는, 충돌지점 중심으로 텔레포트 지점표시단계;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 제18항에 있어서,
충돌지점 중심으로 텔레포트 지점표시단계 후, 메인서버의 연산처리부는, HMD 손장착부의 그랩 버튼으로부터의 그랩 버튼신호를 수신하였는지 여부를 판단는, 그랩 버튼신호 수신여부 판단단계;
그랩 버튼신호 수신여부 판단단계에서, 그랩 버튼신호를 수신하지 않았다면, 메인서버의 연산처리부는, HMD 손장착의 전후좌우 이동 버튼으로부터의 전후좌우 이동버튼 신호를 수신하였는지 여부를 판단하고, 전후좌우 이동버튼 신호를 다시 수신하지 않았다면, 지면 충돌지점 연산단계로 되돌아가는, 전후좌우 이동버튼신호 재수신여부 판단단계;
메인서버의 연산처리부는, 충돌지점 중심으로 텔레포트 지점표시단계에서 표시한, 사용자의 바라보는 방향과 텔레포트 지점으로 실습자의 방향과 위치 이동을 행한 영상을 생성하여 HMD 제어부으로 전송하는, 위치 이동실행 단계;
위치 이동실행 단계 후, 또는, 그랩 버튼신호 수신여부 판단단계에서, 그랩 버튼신호를 수신하였다면, 메인서버의 연산처리부는, 충돌지점 중심으로 텔레포트 지점표시단계에서 표시한 텔레포트 지점을 해제하는, 텔레포트 지점표시 해제단계;
를 더 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 가상 실습을 실시하기 전에, 메인서버가 가상환자를 생성하여 디스플레이하는, 가상 방사선학 실습 장치의 구동방법에 있어서,
메인서버의 연산처리부는, MRI 스캔 데이터 또는 CT 스캔 데이터로 이루어진 의료영상 데이터를 영상처리서버로 전송하는 단계;
영상처리서버는, 심층인공신경망구조를 사용하여, 메인서버로부터 수신한 의료영상 데이터의 영상분할을 행하고, 분할된 영상을 이용하여 장기 또는 조직의 메쉬 데이터(표면정보)를 산출하고, 산출된 장기 또는 조직의 표면정보(메쉬 데이터)를 메인서버로 전송하는 단계;
메인서버는 수신된 표면정보(메쉬 데이터)를 가상환자의 소정부분을, 3D모델의 표면정보(메쉬 데이터)로 변경하여, 가상환자를 디스플레이하는 단계;
를 포함하는 것을 특징으로 하는 가상 방사선학 실습 장치의 구동방법. - 가상 실습이 끝나면, 메인서버가 가상 방사선 촬영 결과화면을 생성하는, 가상 방사선학 실습 장치의 구동방법에 있어서,
메인서버의 연산처리부는, 촬영대상, 촬영기, 필름의 상대적 위치 및 각도 값을 읽어들이는, 촬영대상과 촬영기와 필름의 상대적 위치 읽기단계;
메인서버의 연산처리부는 설정된 환자의 CT 스캔 데이터를 데이터베이스로부터 읽어들이는, CT 스캔 데이터 로드단계;
메인서버의 연산처리부는 볼륨렌더링을 통한 CT 스캔데이터의 3차원 모델링을 행하는, CT 스캔데이터의 3차원 모델링단계;
메인서버의 연산처리부는 CT 스캔데이터의 3차원 모델링단계에서 생성된 3차원 모델과, 필름 및 촬영기의 상대적 위치에 따라, 촬영기와 필름 사이의 상기 3차원 모델의 3차원 데이터를 2차원 평면에 투과시켜 방사선 사진을 생성하는, 방사선 사진 생성단계;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 가상 실습이 끝나면, 메인서버가 가상 방사선 촬영 결과화면을 생성하는, 가상 방사선학 실습 장치의 구동방법에 있어서,
메인서버의 연산처리부는, 촬영대상, 촬영기, 필름의 상대적 위치 및 각도 값을 읽어들이는, 촬영대상과 촬영기와 필름의 상대적 위치 읽기단계;
메인서버의 연산처리부는, 기 설정된 환자의 타겟부위 방사선 사진을 데이터베이스로부터 읽어들이는, 방사선사진 로드단계;
메인서버의 연산처리부는, 방사선사진 로드단계에 읽어들인 타겟부위 방사선 사진인, 원본 방사선 사진을 투영하여, 촬영기 평행방향으로 이동하고, 투영에 따른 사진 크기를 확대 또는 축소하는, 원본 방사선 사진의 크기 조절단계;
메인서버의 연산처리부는, 원본 방사선 사진의 크기 조절단계 후, 투영사진과 필름이, 접점이 있는지 여부를 판단하고, 접점이 없다면, 원본 방사선 사진의 크기 조절단계로 되돌아가는, 접점존재 여부판단단계;
접점존재 여부판단단계에서 접점이 있다면, 메인서버의 연산처리부는, 상기 접점의 투영사진 픽셀값을, 결과사진을 저장하는 버퍼에, 복사하는, 픽셀값 저장단계;
를 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법. - 제22항에 있어서,
투영사진이 필름영역을 벗어났는지 여부를 판단하고, 벗어나지 않았다면, 원본 방사선 사진의 크기 조절단계로 되돌아가고, 투영사진이 필름영역을 벗어 났다면, 종료하는, 필름영역을 벗어났는지 여부 판단단계;
를 더 포함하여 이루어진 것을 특징으로 하는, 가상 방사선학 실습 장치의 구동방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210065235A KR20210064129A (ko) | 2017-02-24 | 2021-05-21 | 가상현실 기반 방사선학 실습 장치 및 방법 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170024721 | 2017-02-24 | ||
| KR20170024721 | 2017-02-24 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210065235A Division KR20210064129A (ko) | 2017-02-24 | 2021-05-21 | 가상현실 기반 방사선학 실습 장치 및 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180098174A true KR20180098174A (ko) | 2018-09-03 |
| KR102343387B1 KR102343387B1 (ko) | 2021-12-29 |
Family
ID=63252806
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180022591A Active KR102343387B1 (ko) | 2017-02-24 | 2018-02-26 | 가상현실 기반 방사선학 실습 장치 및 방법 |
| KR1020210065235A Withdrawn KR20210064129A (ko) | 2017-02-24 | 2021-05-21 | 가상현실 기반 방사선학 실습 장치 및 방법 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210065235A Withdrawn KR20210064129A (ko) | 2017-02-24 | 2021-05-21 | 가상현실 기반 방사선학 실습 장치 및 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11157131B2 (ko) |
| KR (2) | KR102343387B1 (ko) |
| CN (1) | CN110366746B (ko) |
| MY (1) | MY198241A (ko) |
| WO (1) | WO2018155973A2 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102127664B1 (ko) | 2019-02-28 | 2020-06-29 | 신성대학교 산학협력단 | 가상 현실 기반의 발치 시술을 위한 협조 시뮬레이션 시스템 및 그 방법 |
| KR20200092659A (ko) * | 2019-01-25 | 2020-08-04 | 서울대학교산학협력단 | 의료 커뮤니케이션 가상 훈련 시뮬레이션 시스템 및 방법 |
| KR102191027B1 (ko) * | 2019-12-20 | 2020-12-15 | 주식회사 테트라시그넘 | 가상현실 기반의 심폐소생술 교육 시스템 |
| KR102206014B1 (ko) * | 2020-07-20 | 2021-01-21 | (주)엠라인스튜디오 | 가상 체험형 안전 교육 시스템 |
| KR20210086210A (ko) * | 2019-12-31 | 2021-07-08 | 단국대학교 천안캠퍼스 산학협력단 | 가상환경의 가상 치아 발치 실습 시스템 및 방법 |
| KR20220043562A (ko) * | 2020-09-29 | 2022-04-05 | 인제대학교 산학협력단 | 가상현실을 이용한 진료 및 임상술기 시뮬레이션 제공 시스템 |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10503388B2 (en) | 2013-09-03 | 2019-12-10 | Apple Inc. | Crown input for a wearable electronic device |
| US12287962B2 (en) | 2013-09-03 | 2025-04-29 | Apple Inc. | User interface for manipulating user interface objects |
| EP3042271B1 (en) | 2013-09-03 | 2020-03-18 | Apple Inc. | User interface object manipulations in a user interface |
| US11068128B2 (en) | 2013-09-03 | 2021-07-20 | Apple Inc. | User interface object manipulations in a user interface |
| EP4036685A1 (en) | 2014-06-27 | 2022-08-03 | Apple Inc. | Reduced size user interface |
| TW201610758A (zh) * | 2014-09-02 | 2016-03-16 | 蘋果公司 | 按鈕功能性 |
| US10073590B2 (en) | 2014-09-02 | 2018-09-11 | Apple Inc. | Reduced size user interface |
| TWI676127B (zh) | 2014-09-02 | 2019-11-01 | 美商蘋果公司 | 關於電子郵件使用者介面之方法、系統、電子器件及電腦可讀儲存媒體 |
| WO2016036510A1 (en) | 2014-09-02 | 2016-03-10 | Apple Inc. | Music user interface |
| GB2567636B (en) * | 2017-10-17 | 2021-11-10 | Perspectum Diagnostics Ltd | Method and apparatus for imaging an organ |
| US11435830B2 (en) | 2018-09-11 | 2022-09-06 | Apple Inc. | Content-based tactile outputs |
| CN111228656A (zh) * | 2020-01-15 | 2020-06-05 | 于金明 | 基于虚拟智能医疗平台的放疗外照射治疗实施质控系统及方法 |
| US11090873B1 (en) * | 2020-02-02 | 2021-08-17 | Robert Edwin Douglas | Optimizing analysis of a 3D printed object through integration of geo-registered virtual objects |
| US11363247B2 (en) * | 2020-02-14 | 2022-06-14 | Valve Corporation | Motion smoothing in a distributed system |
| CN111402660A (zh) * | 2020-03-02 | 2020-07-10 | 武汉大学 | 基于5g网络的远程vr口腔种植教学系统 |
| CN113934290B (zh) * | 2020-07-13 | 2024-11-12 | 阿里巴巴集团控股有限公司 | 虚拟内容显示方法、装置及设备 |
| US11676390B2 (en) * | 2020-10-23 | 2023-06-13 | Huawei Technologies Co., Ltd. | Machine-learning model, methods and systems for removal of unwanted people from photographs |
| CN115047966B (zh) * | 2021-02-26 | 2025-08-01 | 华为技术有限公司 | 交互方法、电子设备与交互系统 |
| US12429947B2 (en) * | 2021-05-11 | 2025-09-30 | Axon Enterprise, Inc. | Equipment detection using a wearable device |
| WO2023039034A1 (en) * | 2021-09-08 | 2023-03-16 | MedCognition, Inc. | System and method for performing physical exam on xr-based simulated patients |
| TWI844902B (zh) * | 2021-09-09 | 2024-06-11 | 財團法人工業技術研究院 | 資訊顯示方法及其處理裝置與資訊顯示系統 |
| CN115794004A (zh) | 2021-09-09 | 2023-03-14 | 财团法人工业技术研究院 | 信息显示方法及其处理装置与信息显示系统 |
| CN117648035B (zh) * | 2023-12-14 | 2024-11-05 | 上海最安网络科技有限公司 | 一种虚拟手势的控制方法及装置 |
| CN120432113B (zh) * | 2025-03-20 | 2026-03-06 | 首都医科大学附属北京朝阳医院 | 用于医学康复训练基于肺部慢病管理及机体恢复的虚拟现实设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100721713B1 (ko) * | 2005-08-25 | 2007-05-25 | 명지대학교 산학협력단 | 몰입형 활선작업 교육시스템 및 그 방법 |
| JP2009069918A (ja) * | 2007-09-10 | 2009-04-02 | Canon Inc | 情報処理装置、情報処理方法 |
| US20160180595A1 (en) * | 2014-12-18 | 2016-06-23 | Oculus Vr, Llc | Method, system and device for navigating in a virtual reality environment |
| KR20160128119A (ko) * | 2015-04-28 | 2016-11-07 | 엘지전자 주식회사 | 이동 단말기 및 이의 제어방법 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1185307A (zh) * | 1996-12-18 | 1998-06-24 | 杨宏伟 | 医用影像计算机诊断系统 |
| FR2808366B1 (fr) | 2000-04-26 | 2003-12-19 | Univ Paris Vii Denis Diderot | Procede et systeme d'apprentissage en realite virtuelle, et application en odontologie |
| JP3766608B2 (ja) * | 2001-05-02 | 2006-04-12 | テラリコン・インコーポレイテッド | ネットワーク環境における三次元画像表示装置 |
| US20040224294A1 (en) * | 2002-11-27 | 2004-11-11 | Heininger Raymond H. | Simulated, interactive training lab for radiologic procedures |
| JP4042695B2 (ja) * | 2004-01-08 | 2008-02-06 | セイコーエプソン株式会社 | プロジェクタおよびズーム調整方法 |
| KR100967950B1 (ko) * | 2007-05-03 | 2010-07-06 | 목포과학대학산학협력단 | 씨티 시뮬레이션 장치 및 방법, 그것을 기록한 기록매체와프로그램 |
| US9881520B2 (en) * | 2008-01-08 | 2018-01-30 | Immersion Medical, Inc. | Virtual tool manipulation system |
| KR20090078487A (ko) * | 2008-01-15 | 2009-07-20 | (주)온디맨드소프트 | 3/4차원 초음파 진단기술 습득용 시뮬레이터 및 그시뮬레이션 방법 |
| KR101151054B1 (ko) * | 2008-03-26 | 2012-06-01 | 에스케이플래닛 주식회사 | 가상 현실 세계에서의 이동 체험 서비스 시스템 및 방법 |
| JP2009238228A (ja) * | 2009-04-18 | 2009-10-15 | Ge Medical Systems Global Technology Co Llc | 医用画像診断装置の設置シミュレーション方法、システム、プログラムおよび記憶媒体 |
| KR101206340B1 (ko) | 2011-04-29 | 2012-11-29 | 주식회사 코어메드 | 영상수술 리허설 제공방법 및 시스템, 그 기록매체 |
| CN103310471B (zh) * | 2012-03-09 | 2016-01-13 | 株式会社日立医疗器械 | Ct图像生成装置及方法、ct图像生成系统 |
| JP2016131573A (ja) * | 2015-01-15 | 2016-07-25 | キヤノン株式会社 | トモシンセシス撮影の制御装置、放射線撮影装置、制御システム、制御方法及びプログラム |
| JP2016145978A (ja) * | 2015-01-29 | 2016-08-12 | 公立大学法人首都大学東京 | X線撮影学習システム |
| US20170354864A1 (en) * | 2016-06-11 | 2017-12-14 | Sony Interactive Entertainment Inc. | Directional Interface Object |
| CN106293082A (zh) | 2016-08-05 | 2017-01-04 | 成都华域天府数字科技有限公司 | 一种基于虚拟现实的人体解剖交互系统 |
| US9947102B2 (en) * | 2016-08-26 | 2018-04-17 | Elekta, Inc. | Image segmentation using neural network method |
| US20180098583A1 (en) * | 2016-10-12 | 2018-04-12 | Oculus Vr, Llc | Force grounding wristband for haptic glove |
| CN106251751B (zh) * | 2016-10-12 | 2019-05-24 | 快创科技(大连)有限公司 | 一种基于vr技术的医疗手术模拟仿真系统 |
| US10621773B2 (en) * | 2016-12-30 | 2020-04-14 | Google Llc | Rendering content in a 3D environment |
-
2018
- 2018-02-26 MY MYPI2019004894A patent/MY198241A/en unknown
- 2018-02-26 CN CN201880013656.3A patent/CN110366746B/zh active Active
- 2018-02-26 KR KR1020180022591A patent/KR102343387B1/ko active Active
- 2018-02-26 US US16/488,841 patent/US11157131B2/en active Active
- 2018-02-26 WO PCT/KR2018/002313 patent/WO2018155973A2/ko not_active Ceased
-
2021
- 2021-05-21 KR KR1020210065235A patent/KR20210064129A/ko not_active Withdrawn
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100721713B1 (ko) * | 2005-08-25 | 2007-05-25 | 명지대학교 산학협력단 | 몰입형 활선작업 교육시스템 및 그 방법 |
| JP2009069918A (ja) * | 2007-09-10 | 2009-04-02 | Canon Inc | 情報処理装置、情報処理方法 |
| US20160180595A1 (en) * | 2014-12-18 | 2016-06-23 | Oculus Vr, Llc | Method, system and device for navigating in a virtual reality environment |
| KR20160128119A (ko) * | 2015-04-28 | 2016-11-07 | 엘지전자 주식회사 | 이동 단말기 및 이의 제어방법 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20200092659A (ko) * | 2019-01-25 | 2020-08-04 | 서울대학교산학협력단 | 의료 커뮤니케이션 가상 훈련 시뮬레이션 시스템 및 방법 |
| KR102127664B1 (ko) | 2019-02-28 | 2020-06-29 | 신성대학교 산학협력단 | 가상 현실 기반의 발치 시술을 위한 협조 시뮬레이션 시스템 및 그 방법 |
| KR102191027B1 (ko) * | 2019-12-20 | 2020-12-15 | 주식회사 테트라시그넘 | 가상현실 기반의 심폐소생술 교육 시스템 |
| KR20210086210A (ko) * | 2019-12-31 | 2021-07-08 | 단국대학교 천안캠퍼스 산학협력단 | 가상환경의 가상 치아 발치 실습 시스템 및 방법 |
| KR102206014B1 (ko) * | 2020-07-20 | 2021-01-21 | (주)엠라인스튜디오 | 가상 체험형 안전 교육 시스템 |
| KR20220043562A (ko) * | 2020-09-29 | 2022-04-05 | 인제대학교 산학협력단 | 가상현실을 이용한 진료 및 임상술기 시뮬레이션 제공 시스템 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2018155973A2 (ko) | 2018-08-30 |
| KR102343387B1 (ko) | 2021-12-29 |
| CN110366746A (zh) | 2019-10-22 |
| MY198241A (en) | 2023-08-16 |
| CN110366746B (zh) | 2022-08-16 |
| KR20210064129A (ko) | 2021-06-02 |
| US11157131B2 (en) | 2021-10-26 |
| WO2018155973A3 (ko) | 2018-10-25 |
| US20200333940A1 (en) | 2020-10-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102343387B1 (ko) | 가상현실 기반 방사선학 실습 장치 및 방법 | |
| CN106687046B (zh) | 用于定位进行医学成像的患者的引导系统 | |
| CN110199357B (zh) | 提供背景叠加的增强现实介入系统 | |
| CN115804652B (zh) | 手术操作系统及方法 | |
| KR101816172B1 (ko) | 의료 훈련 시뮬레이션 시스템 및 방법 | |
| CN102551743B (zh) | 数字x射线成像系统及方法 | |
| JP6789310B2 (ja) | 移動追尾及びシミュレーション用の装置並びに方法 | |
| US20110002444A1 (en) | Model based self-positioning patient table for x-ray systems | |
| US20160299565A1 (en) | Eye tracking for registration of a haptic device with a holograph | |
| CN113164137A (zh) | 对医学x射线成像装置进行定位 | |
| CN117897100A (zh) | X射线成像中的对象可视化 | |
| JPWO2021020112A5 (ko) | ||
| JP2023057498A (ja) | 画像の重ね合わせ比較による運動姿勢評価システム | |
| JP2020509890A5 (ko) | ||
| FR3114957A1 (fr) | Système de navigation en réalité augmentée pour un robot médical | |
| CN112397189A (zh) | 一种医用导引装置及其使用方法 | |
| CN116157072B (zh) | 一维位置指示符 | |
| TWM569887U (zh) | Augmented reality system | |
| CN114972637A (zh) | 一种面向骨科教学的可移动混合现实技术实现方法及系统 | |
| CN114464307B (zh) | 交互方法、装置、电子设备及存储介质 | |
| JP6936452B1 (ja) | X線撮影学習装置、x線撮影学習プログラム及びx線撮影学習システム | |
| CN117859153A (zh) | 信息处理装置、信息处理方法和程序 | |
| CN119924866A (zh) | 一种放射性射线成像的方法及设备 | |
| JP2024027651A (ja) | 情報処理装置、放射線撮影システム、情報処理方法及びプログラム | |
| JPH09305788A (ja) | 情報処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application |
St.27 status event code: A-0-1-A10-A12-nap-PA0109 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PG1501 | Laying open of application |
St.27 status event code: A-1-1-Q10-Q12-nap-PG1501 |
|
| A201 | Request for examination | ||
| PA0201 | Request for examination |
St.27 status event code: A-1-2-D10-D11-exm-PA0201 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| D13-X000 | Search requested |
St.27 status event code: A-1-2-D10-D13-srh-X000 |
|
| D14-X000 | Search report completed |
St.27 status event code: A-1-2-D10-D14-srh-X000 |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
St.27 status event code: A-1-2-D10-D21-exm-PE0902 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| T11-X000 | Administrative time limit extension requested |
St.27 status event code: U-3-3-T10-T11-oth-X000 |
|
| A107 | Divisional application of patent | ||
| E13-X000 | Pre-grant limitation requested |
St.27 status event code: A-2-3-E10-E13-lim-X000 |
|
| P11-X000 | Amendment of application requested |
St.27 status event code: A-2-2-P10-P11-nap-X000 |
|
| P13-X000 | Application amended |
St.27 status event code: A-2-2-P10-P13-nap-X000 |
|
| PA0107 | Divisional application |
St.27 status event code: A-0-1-A10-A18-div-PA0107 St.27 status event code: A-0-1-A10-A16-div-PA0107 |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
St.27 status event code: A-1-2-D10-D22-exm-PE0701 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
St.27 status event code: A-2-4-F10-F11-exm-PR0701 |
|
| PR1002 | Payment of registration fee |
St.27 status event code: A-2-2-U10-U11-oth-PR1002 Fee payment year number: 1 |
|
| PG1601 | Publication of registration |
St.27 status event code: A-4-4-Q10-Q13-nap-PG1601 |
|
| R18-X000 | Changes to party contact information recorded |
St.27 status event code: A-5-5-R10-R18-oth-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| P22-X000 | Classification modified |
St.27 status event code: A-4-4-P10-P22-nap-X000 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 4 |
|
| PR1001 | Payment of annual fee |
St.27 status event code: A-4-4-U10-U11-oth-PR1001 Fee payment year number: 5 |
|
| U11 | Full renewal or maintenance fee paid |
Free format text: ST27 STATUS EVENT CODE: A-4-4-U10-U11-OTH-PR1001 (AS PROVIDED BY THE NATIONAL OFFICE) Year of fee payment: 5 |