KR20170138663A - Drone Station - Google Patents
Drone Station Download PDFInfo
- Publication number
- KR20170138663A KR20170138663A KR1020160070731A KR20160070731A KR20170138663A KR 20170138663 A KR20170138663 A KR 20170138663A KR 1020160070731 A KR1020160070731 A KR 1020160070731A KR 20160070731 A KR20160070731 A KR 20160070731A KR 20170138663 A KR20170138663 A KR 20170138663A
- Authority
- KR
- South Korea
- Prior art keywords
- battery
- drone
- drones
- station
- unit
- Prior art date
Links
- 238000012423 maintenance Methods 0.000 claims abstract description 6
- 238000000034 method Methods 0.000 claims description 18
- 238000003032 molecular docking Methods 0.000 claims description 15
- 230000002441 reversible effect Effects 0.000 claims description 4
- 230000004308 accommodation Effects 0.000 abstract 1
- 238000004891 communication Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000011017 operating method Methods 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 229920003002 synthetic resin Polymers 0.000 description 1
- 239000000057 synthetic resin Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F1/00—Ground or aircraft-carrier-deck installations
-
- B60L11/1822—
-
- B60L11/1877—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/66—Arrangements of batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/80—Exchanging energy storage elements, e.g. removable batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F1/00—Ground or aircraft-carrier-deck installations
- B64F1/12—Ground or aircraft-carrier-deck installations for anchoring aircraft
- B64F1/125—Mooring or ground handling devices for helicopters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02S—GENERATION OF ELECTRIC POWER BY CONVERSION OF INFRARED RADIATION, VISIBLE LIGHT OR ULTRAVIOLET LIGHT, e.g. USING PHOTOVOLTAIC [PV] MODULES
- H02S10/00—PV power plants; Combinations of PV energy systems with other systems for the generation of electric power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/10—Air crafts
-
- B60L2230/22—
-
- B60L2230/30—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/50—Charging stations characterised by energy-storage or power-generation means
- B60L53/51—Photovoltaic means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/50—Charging stations characterised by energy-storage or power-generation means
- B60L53/53—Batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/50—Photovoltaic [PV] energy
- Y02E10/52—PV systems with concentrators
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Description
본 발명은 무인항공기인 드론의 관리 및 충전을 위한 드론 스테이션에 대한 것으로, 드론의 비행구역 지표면에 설치되고 드론을 스테이션에 착함시킨 후 점검 및 배터리 교환 후 다시 이륙시키도록 하는 것이다.The present invention relates to a drone station for managing and charging a drone, which is an unmanned airplane, and is installed on the ground surface of the drones, and the drones are mounted on the station, and then checked and recharged after replacing the battery.
무인항공기인 드론을 이용한 다양한 기술이 제안되고 있으며, 그중 대표적인 것이 산불과 같은 무인감시 시스템 또는 무인 배송 서비스 등이 있을 수 있다.Various technologies using drone, a drone, have been proposed, among which there may be an unmanned surveillance system such as forest fire or an unmanned delivery service.
이와 같은 시스템 또는 운영방법에 있어서, 드론의 관리가 무엇보다 중요한데 대부분의 드론은 탑재된 배터리의 용량이 매우 적어 일정시간 이상 지속적으로 비행이 불가능하여, 연속적인 감시 또는 물건 배달에 한계가 있었다.In such a system or operating method, the management of the drones is most important. In most drones, the capacity of the mounted battery is so small that continuous flying over a certain period of time is impossible, and continuous monitoring or delivery of goods is limited.
이러한 문제점을 극복하기 위해, 대한민국 등록특허 제10-1564254호(드론 무선충전 시스템, 이하 '선행기술 1'이라 함) 및 또한, 대한민국 등록특허 제10-1599423호(드론 충전 플랫폼 시스템, 이하 '선행기술 2'라 함)는 드론 무선충전 시스템 및 드론 충전 플랫폼 시스템은 양력 및 비행력을 발생시키는 구동부와, 상기 구동부로 동력을 제공하는 무선충전 배터리와, 인공위성을 이용하여 위치를 파악하는 GPS와, 상기 무선충전 배터리의 충전량을 감지하는 충전량 감지부와, 상기 각 부의 동작을 제어하는 제어부를 구비하는 드론; 상기 드론이 안착 가능한 형상으로 형성되되 안착된 드론의 무선충전 배터리를 충전시킬 수 있는 충전패드를 구비하도록 구성되어, 상호 기준거리 이상 이격되도록 설치되는 복수 개의 무선충전소; 상기 무선충전소의 동작을 제어하는 서버;를 포함한다. 또한 선행기술 1의 드론 무선충전 시스템과 선행기술 2의 드론 충전 플랫폼 시스템을 이용하면, 사용자가 직접 드론의 배터리에 충전기를 연결하지 아니하더라도 드론의 배터리를 충전시킬 수 있어 멀리까지 드론을 비행시킬 수 있고, 사전에 사용이 허락된 사용자만이 무선충전기능을 사용할 수 있어 상품화가 가능해지며, 보다 안정적으로 드론의 배터리를 무선방식으로 충전시킬 수 있는 기술을 제안하고 있다.In order to overcome such a problem, Korean Patent Registration No. 10-1564254 (Drone wireless charging system, hereinafter referred to as "
그러나, 제안된 선행기술 1과 2의 경우 드론을 착륙시킨 후 충전작업을 수행해야 하기 때문에, 드론에 탑재된 배터리의 연속 사용으로 인한 충방전 수명이 현저하게 저하되며, 충전시간 동안 드론의 동작이 제안되고 또다른 드론을 충전하기 위해서는 선충전중인 드론의 충전이 완료된 후 작업이 진행되야하기 때문에 연속적이고 신속한 충전작업이 불가능한 단점이 있었다.However, in the case of the proposed
상기와 같은 문제점을 극복하기 위해, 본 발명의 드론 스테이션은 복수개의 충전지를 구비하고 충전이 완료된 배터리를 신속하게 방전된 드론 배터리와 교체할 수 있으며, 드론의 배터리 교체시 드론의 이상유무도 파악할 수 있도록 하는 드론 스테이션을 제공하는 것을 본 발명의 목적으로 한다.In order to overcome the above-described problems, the inventive dron station can replace a charged battery with a rapidly discharged dron battery having a plurality of rechargeable batteries, and can detect an abnormality of a dron when a battery of the dron is replaced And to provide a drones station which is capable of providing the same.
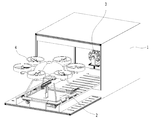
상기와 같은 본 발명의 목적을 달성하기 위해 드론에 구비되는 배터리의 충전과 같은 정비를 위한 드론스테이션에 있어서, 내측에 수용공간을 구비하는 함체부(1)와 상기 함체부(1) 내측 하단부에 구비되어 드론을 함체부(1)의 내측으로 이송시키기 위한 드론트레이부(2) 및 상기 함체부(1)의 내측에 구비되며, 배터리 교환 및 충전을 위한 배터리스토리지(3)로 구성되는 것을 특징으로 하는 드론 스테이션을 제공하게 된다.In order to accomplish the object of the present invention as described above, a drone station for maintenance such as charging of a battery provided in a drone includes a
이때, 상기 함체부(1)는 내측에 수용공간을 구비하며, 일측면이 개방되는 박스형태로 형성되고, 내측 하단면에는 드론트레이부(2)를 이송시키기 위한 가이드플레이트(11)가 구비되되, 함체부(1)의 내부에 구비되는 배터리스토리지(3)로부터 함체부(1)의 개방면의 외부로 돌출되도록 형성되도록 하며, 상기 가이드플레이트(11)의 양측단부에는 드론트레이(2)가 외부로 이탈되거나 배터리스토리지(3)와의 도킹위치에 도달할 수 있도록 상단방향으로 가이드돌기(11a)가 형성되고, 상기 가이드돌기(11a)의 내측으로 함몰된 가이드홈(11b)이 더 형성되도록 한다.At this time, the
또한, 상기 함체부(1)의 상측면에는 대기 또는 비상시 사용되기 위한 전원을 발생키는 솔라셀(12)이 더 구비되도록 한다.In addition, a
상기와 같은 상기 드론트레이(2)는 드론(4)을 함체부(1) 내측으로 이송시키기 위한 패널(21)과 상기 패널(21)의 하단부에 이송바퀴를 구비하고, 패널(21)의 상측면 각각의 모서리 부분에 드론(4)의 지지대가 안착되는 지지대안착홀(23)을 형성하며, 드론의 배터리를 탈거시키기 위한 배터리탈거유닛(24)이 패널(21)의 상측면 중앙에 구비되도록 하며, 상기 배터리탈거유닛(24)은 승강동작을 하는 지지대(24a)와 상기 지지대(24a)의 상측에 횡측방향으로 배치되어 배터리를 배터리스토리지(3) 방향으로 이송시키는 실린더붐(24b)으로 구성되고, 상기 패널(21)의 양측면에는 가이드휠(25)이 더 구비되도록 한다.The
또한, 상기 배터리스토리지(3)는 지지프레임(31)과 상기 지지프레임(31)에 의해 지지되며, 복수개의 배터리를 인입하고 회전할 수 있도록 하기 위해 복수개의 배터리충전구(32a)가 형성되는 리벌버드럼(32) 및 배터리부착유닛(33)으로 구성되고, 상기 배터리스토리지(3)는 복수개의 배터리를 구비하는 리벌버드럼(32)을 배터리 부착위치로 회동시키도록 하는 구동모터(34)가 더 구비된다.The
또한, 상기 리벌버드럼(32)의 전방측에는 드론(4)이 배터리 교환을 위한 정위치에 위치하도록 하며, 드론의 배터리잠금장치를 해제하기 위한 가이드홈(35a)이 형성되는 도킹가이드(35)가 더 구비되되, 일측 단부에 테이퍼면이 형성되도록 하는 것을 특징으로 하는 드론 스테이션을 제공함으로써 본 발명의 목적을 달성할 수 있는 것이다.A
본 발명의 드론 스테이션을 제공함으로써, 드론의 배터리 교체가 용이하고, 복수개의 배터리를 이용하여 배터리 수명연한을 연장할 수 있으며, 배터리 교환에 따른 소요시간을 단축할 수 있어 복수개의 드론을 용이하게 운영할 수 있는 효과가 있다.By providing the drone station of the present invention, it is possible to easily change the battery of the drone, to extend the service life of the battery by using a plurality of batteries, to shorten the time required for replacing the battery, There is an effect that can be done.
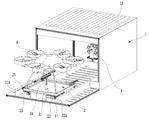
도 1은 본 발명의 사시도이다.
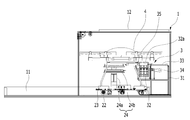
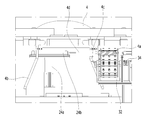
도 2는 본 발명의 구조를 도시하기 위한 측단면도이다.
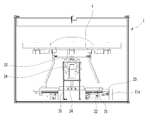
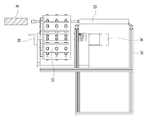
도 3은 본 발명의 구조를 도시하기 위한 배측단면도이다.
도 4와 도 5는 본 발명에 따른 배터리 이탈방법을 설명하기 위한 예시도이다.
도 6과 도 7은 본 발명에 따른 배터리 장착방법을 설명하기 위한 예시도이다.
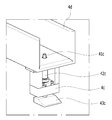
도 8 내지 도 10은 본 발명에 따른 배터리의 착탈방법의 일예를 도시하기 위한 예시도이다.
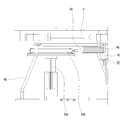
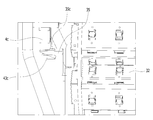
도 11과 도 12는 본 발명에 따른 드론의 도킹방법을 설명하기 위한 예시도이다.1 is a perspective view of the present invention.
2 is a side sectional view showing the structure of the present invention.
3 is a side sectional view showing the structure of the present invention.
4 and 5 are diagrams for explaining a battery detaching method according to the present invention.
6 and 7 are illustrations for explaining a battery mounting method according to the present invention.
8 to 10 are illustrations for illustrating an example of a method for attaching and detaching a battery according to the present invention.
11 and 12 are diagrams for explaining the docking method of the drones according to the present invention.
이하에서 당업자 본 발명의 드론 스테이션을 용이하게 실시할 수 있도록 도면을 참조하여 상세하게 설명하도록 한다.Hereinafter, the drone station of the present invention will be described in detail with reference to the drawings so that those skilled in the art can easily carry out the present invention.
도 1은 본 발명의 사시도이고, 도 2는 본 발명의 구조를 도시하기 위한 측단면도이며, 도 3은 본 발명의 구조를 도시하기 위한 배측단면도이다.FIG. 1 is a perspective view of the present invention, FIG. 2 is a side sectional view showing a structure of the present invention, and FIG. 3 is a rear sectional view showing a structure of the present invention.
도 4와 도 5는 본 발명에 따른 배터리 이탈방법을 설명하기 위한 예시도이고, 도 6과 도 7은 본 발명에 따른 배터리 장착방법을 설명하기 위한 예시도이고, 도 8 내지 도 10은 본 발명에 따른 배터리의 착탈방법의 일예를 도시하기 위한 예시도이며, 도 11과 도 12는 본 발명에 따른 드론의 도킹방법을 설명하기 위한 예시도이다.FIGS. 6 and 7 are views for explaining a battery mounting method according to the present invention, and FIGS. 8 to 10 illustrate a battery mounting method according to the present invention FIGS. 11 and 12 illustrate a docking method of a dron according to the present invention. Referring to FIGS.
도 1 내지 도 12를 참조하여 상세하게 설명하면, 본 발명의 드론스테이션은 내측에 수용공간을 구비하는 함체부(1)와 상기 함체부 내측 하단부에 구비되어 드론을 이송시키기 위한 드론트레이부(2)와 함체부의 내측에 구비되며, 배터리 교환 및 충전을 위한 배터리스토리지(3)로 구성된다.1 to 12, the drum station of the present invention includes a
상기 함체부(1)는 내측에 수용공간을 구비하며, 일측면이 개방되는 박스형태로 형성되고, 상측면에는 대기 또는 비상시 사용되기 위한 전원을 발생시키기 위한 솔라셀(12)이 더 구비된다.The
또한 내측 하단면에는 드론트레이부(2)를 이송시키기 위한 가이드플레이트(11)가 구비되는데, 함체부(1) 내부에 구비되는 배터리스토리지(3)로부터 함체부(1)의 개방면의 외부로 돌출되도록 형성된다.A
이때, 상기 가이드플레이트(11)의 양측단부에 상단방향으로 가이드돌기(11a)가 형성되고, 상기 가이드돌기(11a)의 내측으로 함몰된 가이드홈(11b)이 더 형성된다.At this time,
상기와 같은 가이드홈(11b)은 드론(4)을 적재하고 배터리스토리지(3)로 이송시키기 위한 드론트레이(2)가 외부로 이탈되거나 배터리스토리지(3)와의 도킹위치에 도달할 수 있도록 하기 위한 것이다.The
상기와 같은 함체부(1)는 금속재질 뿐만 아니라 강화 합성수지로도 적용될 수 있으며, 본 발명의 설명을 위해 박스형태의 함체구조를 예로 설명하고 있으나 이를 한정하는 것은 아니다.However, the present invention is not limited thereto. For example, a box-shaped enclosure may be used as the reinforcing synthetic resin as well as the metal material.
또한, 상기 함체부(1)의 내측에 배치되며 배터리 교환 등의 정비를 위해 회귀한 드론(4)을 함체부(1)의 내측으로 이송시키기 위한 드론트레이(2)는 패널(21)과 상기 패널(21)의 하단부에 이송바퀴(22)가 구비되고, 패널(21)의 상측면 각각의 모서리 부분에 드론(4)의 지지대(4b)가 안착되는 지지대안착홀(23) 및 드론(4)의 배터리(4a)를 배터리장착구(4d)로부터 탈거시키기 위한 배터리탈거유닛(24)이 패널(21)의 상측면 중앙에 구비된다.The
또한, 상기 드론트레이(2)의 패널(21)의 양측면에는 각각 함체부(1)의 가이드홈(11b)에 대응하는 가이드휠(25)이 더 구비된다.
상기와 같은 가이드휠(25)은 드론트레이(2)가 함체부(1)의 내측으로 이송될 때, 외부로 이탈되거나 배터리스토리지(3)와의 도킹위치를 벗어나 않도록 하기 위한 것이다.The
상기와 같은 드론트레이(2)에 구비되는 배터리탈거유닛(24)은 드론(4)에 결합되어 구비되는 배터리(4a)를 드론으로부터 탈거시키기 위한 것으로, 드론(4)이 배터리스토리지(3)로 이송된 후 승강동작과 함께, 배터리(4a)를 배터리스토리지(3)쪽으로 이송시키는 역할을 하게 된다.The
보다 상세하게 설명하면, 상기 배터리탈거유닛(24)은 지지대(24a)와 상기 지지대(24a)의 상측에 횡측방향으로 배치되는 실린더붐(24b)으로 구성된다.More specifically, the
상기와 같이 구비된 지지대(24a)는 드론(4)의 하단부에 배치되도록 한 후, 드론(4)이 배터리스토리지(3)로 이송되어 도킹위치에 도달하면, 상측방향으로 상승한 후, 지지대(24a)의 상측에 구비되는 실린더붐(24b)을 횡측방향으로 구동시켜 드론으로부터 배터리를 탈거시키게 된다.When the
상기와 같이 탈거시킨 배터리는 배터리스토리지(3) 방향으로 이송된 후, 배터리스토리지(3)의 배터리충전구(32a)에 내삽되게 된다.The battery thus detached is transferred to the
또한, 상기 함체부(1)의 내측에 구비되며, 배터리의 교환 및 충전을 위한 배터리스토리지(3)는 지지프레임(31)과 상기 지지프레임(31)에 의해 지지되며 복수개의 배터리를 인입하고 회전할 수 있도록 하는 리벌버드럼(32) 및 배터리부착유닛(33)으로 구성된다.The
또한, 상기 리벌버드럼(32)을 회동시킬 수 있는 구동모터(34)가 더 구비되어 복수개의 배터리를 부기하는 리벌버드럼(32)을 배터리 부착위치로 회동시키도록 한다.Further, a drive motor (34) capable of rotating the revolver drum (32) is further provided so as to rotate the revolver drum (32), which loads a plurality of batteries, to a battery attachment position.
이때, 상기 리벌버드럼(32)은 원통형으로 형성되고, 복수개의 배터리를 수납할 수 있도록 하는 배터리충전구(32a)를 복수개 구비하게 된다.At this time, the
이와 같은 배터리충전구(32a)의 후방측에는 배터리부착유닛(33)이 구비되어 충전이 완료된 배터리를 드론(4)에 부착하게 되는 것이다.A
보다 상세하게 설명하면, 상기 배터리부착유닛(33)는 지지프레임(31)의 상측에는 횡측방향으로 실린더붐의 형태로 구비되어, 충전이 완료된 배터리를 드론(4) 측으로 이송시켜 드론에 장착하게 되는 것이다.More specifically, the
또한, 상기 리벌버드럼(32)의 전방측에는 도킹가이드(35)가 더 구비되는데, 상기 도킹가이드(35)는 드론(4)이 배터리 교환을 위한 정위치에 위치되도록 하는 가이드홈(35a)가 더 형성된다.A
이는 드론(4)의 배터리장착구(4d)의 일측에 더 구비되는 배터리잠금장치(4c)에 대응할 수 있도록 하는 것으로, 배터리장착구(4d)에 구비되는 배터리잠금장치(4c)의 일측이 가이드홈(35a)에 내삽되어 잠금해제 되거나, 드론(4)이 토킹위치보다 깊게 내삽되는 것을 방지하게 되는 것이다.This allows the
보다 상세하게 설명하면, 상기 배터리잠금장치(4c)는 잠금핀(41c)와 상기 잠금핀(41c)의 외측에 구비되며 잠금핀(41c)에 탄성력을 부여하기 위한 탄성외피(42c)와 상기 잠금핀(41c)의 하단부에 구비되는 테이퍼돌기(43c)로 구성되고, 상기 테이퍼돌기(43c)가 도킹가이드(35)의 일측면에 형성된 테이퍼면을 따라 이동하여 잠금핀(41c)을 하측방향으로 이송시켜 배터리(4a)의 잠금을 해제하게 되며, 또한, 잠금핀(41c)의 일부분이 가이드홈(35a)에 내삽되어 이동함으로써, 정확한 도킹위치를 설정할 수 있는 것이다.More specifically, the
또한, 상기와 같은 배터리스토리지(3)는 별도로 구비되는 제어장치(미도시)에 의해 제어되는데, 상기 제어장치는 함체부(1)의 내측에 배치되거나, 외부에 구비될 수 있으며, 배터리 충전을 위한 별도의 외부전원 또는 함체부(1) 상측에 배치되는 솔라셀로부터 발생되는 전원을 이용하여 배터리를 충전하게 되는 것이다.The
이때, 상기 제어장치는 외부통신이 가능하도록 하여 드론과의 근거리 통신 및 중앙관제서버와의 통신을 통하여 현재의 위치값을 중앙관제서버에 전송하거나, 보유한 배터리의 관리상태 및 드론에 대한 충전 등의 정비이력 등을 중앙관제서버에 전송하게 된다.At this time, the control device makes external communication possible and transmits the current position value to the central control server through short-distance communication with the drones and communication with the central control server, or transmits the current position value to the central control server, Maintenance history and the like to the central control server.
또한, 근거리에 위치하는 드론을 유도하여 충전과 같은 정비를 시행하며, 드론이 함체부의 근거리에 위치하여 도킹 될 때까지의 전반적인 제어를 실시하게 되는 것이다.In addition, a drone positioned in the vicinity is guided to carry out maintenance such as filling, and overall control is performed until the dron is positioned near the docking portion of the hull and is docked.
상기와 같은 방법에 의해 본 발명을 완성할 수 있는 것이다.The present invention can be completed by the above-described method.
1 : 함체부
2 : 드론트레이부
3 : 배터리스토리지
4 : 드론
11 : 가이드플레이트
11a : 가이드돌기
11b : 가이드홈
12 : 솔라셀
21 : 패널
22 : 이송바퀴
23 : 지지대안착홀
24 : 배터리탈거유닛
25 : 가이드휠
31 : 지지프레임
32 : 리벌버드럼
33 : 배터리부착유닛
34 : 구동모터
35 : 도킹가이드1: housing part 2: drone tray part
3: Battery storage 4: Drones
11:
11b: guide groove 12: solar cell
21: Panel 22: Feed wheel
23: Support base seating hole 24: Battery detaching unit
25: guide wheel 31: support frame
32: Reversal drum 33: Battery attachment unit
34: Driving motor 35: Docking guide
Claims (10)
내측에 수용공간을 구비하는 함체부(1); 와
상기 함체부(1) 내측 하단부에 구비되어 드론을 함체부(1)의 내측으로 이송시키기 위한 드론트레이부(2); 및
상기 함체부(1)의 내측에 구비되며, 배터리 교환 및 충전을 위한 배터리스토리지(3)로 구성되는 것을 특징으로 하는 드론 스테이션.
In a drone station for maintenance such as charging a battery provided in a drone,
(1) having a receiving space inside thereof; Wow
A drone tray unit 2 provided at an inner lower side of the hermetic unit 1 to transfer the dron to the inside of the hermetic container 1; And
And a battery storage (3) provided inside the housing part (1) for battery replacement and charging.
상기 함체부(1)는 내측에 수용공간을 구비하며, 일측면이 개방되는 박스형태로 형성되고, 내측 하단면에는 드론트레이부(2)를 이송시키기 위한 가이드플레이트(11)가 구비되되, 함체부(1)의 내부에 구비되는 배터리스토리지(3)로부터 함체부(1)의 개방면의 외부로 돌출되도록 형성되는 것을 특징으로 하는 드론 스테이션.
The method according to claim 1,
The housing portion 1 is formed in a box shape having a receiving space on the inner side and opened at one side thereof and a guide plate 11 for conveying the dron tray portion 2 to an inner lower end surface thereof. Is formed to protrude from the battery storage (3) provided inside the body part (1) to the outside of the open side of the housing part (1).
상기 가이드플레이트(11)의 양측단부에는 드론트레이(2)가 외부로 이탈되거나 배터리스토리지(3)와의 도킹위치에 도달할 수 있도록 상단방향으로 가이드돌기(11a)가 형성되고, 상기 가이드돌기(11a)의 내측으로 함몰된 가이드홈(11b)이 더 형성되는 것을 특징으로 하는 드론 스테이션.
3. The method of claim 2,
Guide protrusions 11a are formed at both ends of the guide plate 11 in the upper direction so that the drones 2 are detached to the outside or can reach the docking position with respect to the battery storage 3, And a guide groove (11b) which is recessed inward of the dowel station.
상기 함체부(1)의 상측면에는 대기 또는 비상시 사용되기 위한 전원을 발생키는 솔라셀(12)이 더 구비되는 것을 특징으로 하는 드론 스테이션.
The method according to claim 1,
And a solar cell (12) for generating power for use in an atmospheric or emergency situation is further provided on the upper side of the hermetic unit (1).
상기 드론트레이(2)는 드론(4)을 함체부(1) 내측으로 이송시키기 위한 패널(21)과 상기 패널(21)의 하단부에 이송바퀴를 구비하고, 패널(21)의 상측면 각각의 모서리 부분에 드론(4)의 지지대가 안착되는 지지대안착홀(23)을 형성하며, 드론의 배터리를 탈거시키기 위한 배터리탈거유닛(24)이 패널(21)의 상측면 중앙에 구비되는 것을 특징으로 하는 드론 스테이션.
The method according to claim 1,
The drum tray 2 includes a panel 21 for transferring the drone 4 to the inside of the housing part 1 and a conveying wheel at a lower end of the panel 21, And a battery detachment unit 24 for detaching the battery of the dron is formed at the center of the upper surface of the panel 21 so as to form a support seat receiving hole 23 in which a support of the drone 4 is seated, Drones station.
상기 배터리탈거유닛(24)은 승강동작을 하는 지지대(24a)와 상기 지지대(24a)의 상측에 횡측방향으로 배치되어 배터리를 배터리스토리지(3) 방향으로 이송시키는 실린더붐(24b)으로 구성되는 것을 특징으로 하는 드론 스테이션.
6. The method of claim 5,
The battery detachment unit 24 includes a support 24a for moving up and down and a cylinder boom 24b disposed on the upper side of the support 24a in the lateral direction to transport the battery toward the battery storage 3 Features a drones station.
상기 패널(21)의 양측면에는 가이드휠(25)이 더 구비되는 것을 특징으로 하는 드론 스테이션.
6. The method of claim 5,
And a guide wheel (25) is further provided on both sides of the panel (21).
상기 배터리스토리지(3)는 지지프레임(31)과 상기 지지프레임(31)에 의해 지지되며, 복수개의 배터리를 인입하고 회전할 수 있도록 하기 위해 복수개의 배터리충전구(32a)가 형성되는 리벌버드럼(32) 및 배터리부착유닛(33)으로 구성되는 것을 특징으로 하는 드론 스테이션.
The method according to claim 1,
The battery storage 3 is supported by the support frame 31 and the support frame 31 and has a plurality of battery charging openings 32a formed therein to allow a plurality of batteries to be drawn and rotated. (32) and a battery attaching unit (33).
상기 배터리스토리지(3)는 복수개의 배터리를 구비하는 리벌버드럼(32)을 배터리 부착위치로 회동시키도록 하는 구동모터(34)가 더 구비되는 것을 특징으로 하는 드론 스테이션.
9. The method of claim 8,
Characterized in that the battery storage (3) further comprises a drive motor (34) for rotating the battery reel drum (32) with a plurality of batteries to the battery attachment position.
상기 리벌버드럼(32)의 전방측에는 드론(4)이 배터리 교환을 위한 정위치에 위치하도록 하고, 드론의 배터리잠금장치를 해제하기 위한 가이드홈(35a)이 형성되는 도킹가이드(35)가 더 구비되되, 일측 단부에 테이퍼면이 형성되도록 하는 것을 특징으로 하는 드론 스테이션.
9. The method of claim 8,
A docking guide 35 is provided on the front side of the reversible drum 32 in such a manner that the drones 4 are positioned at a predetermined position for battery replacement and a guide groove 35a for releasing the battery locking device of the dron is formed. And a tapered surface is formed at one end of the drones.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160070731A KR20170138663A (en) | 2016-06-08 | 2016-06-08 | Drone Station |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160070731A KR20170138663A (en) | 2016-06-08 | 2016-06-08 | Drone Station |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170138663A true KR20170138663A (en) | 2017-12-18 |
Family
ID=60923113
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160070731A KR20170138663A (en) | 2016-06-08 | 2016-06-08 | Drone Station |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170138663A (en) |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160080506A (en) * | 2014-12-29 | 2016-07-08 | 엘지이노텍 주식회사 | Unmanned logistics transportation apparatus and communication apparatus for supporting the same |
| CN108744341A (en) * | 2018-04-16 | 2018-11-06 | 南京森林警察学院 | A kind of high-precision forest fires saving method |
| CN109533330A (en) * | 2018-10-24 | 2019-03-29 | 珠海模范智能科技有限公司 | A kind of unmanned plane recyclable device and recovery method |
| KR102071808B1 (en) * | 2018-09-07 | 2020-01-30 | 주식회사 에스원 | Rack for containing electronic device |
| KR20200012082A (en) * | 2018-07-26 | 2020-02-05 | (주)스마트어플라이언스 | Dron station with top mounted battery replacement structure |
| CN110937127A (en) * | 2019-12-25 | 2020-03-31 | 上海赛摩电气有限公司 | Automatic charging hangar of unmanned aerial vehicle |
| KR20200050824A (en) | 2018-11-02 | 2020-05-12 | 주식회사 이스온 | Pole elevating system for storaging the drone |
| KR102144648B1 (en) * | 2020-02-03 | 2020-08-13 | 주식회사 인에이블인터내셔널 | Apparatus for charging battery |
| KR102151423B1 (en) * | 2019-04-18 | 2020-09-03 | 유콘시스템 주식회사 | Secondary accident prevention system using drone |
| KR20210017676A (en) | 2019-08-09 | 2021-02-17 | 주식회사 엠지아이티 | Drone station |
| CN112428867A (en) * | 2020-12-02 | 2021-03-02 | 深圳市多翼创新科技有限公司 | Unmanned aerial vehicle system of berthing |
| WO2021050186A1 (en) | 2019-09-12 | 2021-03-18 | Zayo Group, Llc | Integrated data and charging station |
| CN112523575A (en) * | 2020-12-09 | 2021-03-19 | 北京理工大学 | Storage box |
| CN112810498A (en) * | 2021-03-02 | 2021-05-18 | 浙江树人学院(浙江树人大学) | Plant protection monitoring unmanned aerial vehicle base station system operation method and battery replacement device thereof |
| CN113085614A (en) * | 2021-04-16 | 2021-07-09 | 合肥革绿信息科技有限公司 | Unmanned aerial vehicle automatic charging pile for traffic management and use method thereof |
| US11148805B2 (en) | 2018-04-10 | 2021-10-19 | Government Of The United States, As Represented By The Secretary Of The Army | Enclosure for an unmanned aerial system |
| WO2022014787A1 (en) * | 2020-07-17 | 2022-01-20 | 주시회사 휴머놀러지 | Drone station |
| KR20220078748A (en) * | 2020-12-03 | 2022-06-13 | 주식회사 두드론 | All-weather Docking Station-Based Forest Fire Monitoring and Initial Extinguishing System |
| KR20220106031A (en) * | 2021-01-21 | 2022-07-28 | 주식회사 파블로항공 | Method and apparatus for handling goods by unmanned aerial vehicle and autonomous robot |
| KR102435994B1 (en) * | 2022-04-20 | 2022-08-25 | 주식회사 에이셉챌린지 | Drone station and drone station system using the drone station |
| KR102468546B1 (en) * | 2022-08-08 | 2022-11-18 | 정경하 | Electric power supply apparatus management system for telegraph pole using IoT |
| KR102485588B1 (en) * | 2022-06-10 | 2023-01-09 | 한국전력기술 주식회사 | Vertiport system for UAM or drone autonomous take-off and landing |
| KR20230009227A (en) * | 2021-07-08 | 2023-01-17 | 백형민 | Platform apparatus for drone |
| KR20230108021A (en) * | 2022-01-10 | 2023-07-18 | 이상우 | Underground Remote Automated Drone Ship System |
| WO2023172224A1 (en) * | 2022-03-07 | 2023-09-14 | Met İleri̇ Teknoloji̇ Si̇stemleri̇ Mühendi̇sli̇k İmalat İthalat Ve İhracat Ti̇caret Li̇mi̇ted Şi̇rketi̇ | An unmanned aerial vehicle maintenance station |
| KR20240060236A (en) | 2022-10-28 | 2024-05-08 | 한국항공우주연구원 | Unmanned vtol aircraft station for storage |
| KR102700645B1 (en) * | 2024-02-06 | 2024-08-28 | 한봉호 | A agricultural drone station installed in the cargo box of truck |
-
2016
- 2016-06-08 KR KR1020160070731A patent/KR20170138663A/en not_active Application Discontinuation
Cited By (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160080506A (en) * | 2014-12-29 | 2016-07-08 | 엘지이노텍 주식회사 | Unmanned logistics transportation apparatus and communication apparatus for supporting the same |
| US11148805B2 (en) | 2018-04-10 | 2021-10-19 | Government Of The United States, As Represented By The Secretary Of The Army | Enclosure for an unmanned aerial system |
| CN108744341A (en) * | 2018-04-16 | 2018-11-06 | 南京森林警察学院 | A kind of high-precision forest fires saving method |
| KR20200012082A (en) * | 2018-07-26 | 2020-02-05 | (주)스마트어플라이언스 | Dron station with top mounted battery replacement structure |
| KR102071808B1 (en) * | 2018-09-07 | 2020-01-30 | 주식회사 에스원 | Rack for containing electronic device |
| CN109533330A (en) * | 2018-10-24 | 2019-03-29 | 珠海模范智能科技有限公司 | A kind of unmanned plane recyclable device and recovery method |
| KR20200050824A (en) | 2018-11-02 | 2020-05-12 | 주식회사 이스온 | Pole elevating system for storaging the drone |
| US11292613B2 (en) | 2018-11-02 | 2022-04-05 | Ison Co., Ltd. | Drone-storable pole elevation system |
| KR102151423B1 (en) * | 2019-04-18 | 2020-09-03 | 유콘시스템 주식회사 | Secondary accident prevention system using drone |
| KR20210017676A (en) | 2019-08-09 | 2021-02-17 | 주식회사 엠지아이티 | Drone station |
| US11390182B2 (en) | 2019-09-12 | 2022-07-19 | Zayo Group, Llc | Integrated data and charging station |
| WO2021050186A1 (en) | 2019-09-12 | 2021-03-18 | Zayo Group, Llc | Integrated data and charging station |
| CN110937127A (en) * | 2019-12-25 | 2020-03-31 | 上海赛摩电气有限公司 | Automatic charging hangar of unmanned aerial vehicle |
| WO2021157774A1 (en) * | 2020-02-03 | 2021-08-12 | 주식회사 인에이블인터내셔널 | Battery charging apparatus |
| KR102278338B1 (en) * | 2020-02-03 | 2021-07-16 | 주식회사 인에이블인터내셔널 | Apparatus for charging battery |
| KR102144648B1 (en) * | 2020-02-03 | 2020-08-13 | 주식회사 인에이블인터내셔널 | Apparatus for charging battery |
| WO2022014787A1 (en) * | 2020-07-17 | 2022-01-20 | 주시회사 휴머놀러지 | Drone station |
| CN112428867A (en) * | 2020-12-02 | 2021-03-02 | 深圳市多翼创新科技有限公司 | Unmanned aerial vehicle system of berthing |
| KR20220078748A (en) * | 2020-12-03 | 2022-06-13 | 주식회사 두드론 | All-weather Docking Station-Based Forest Fire Monitoring and Initial Extinguishing System |
| CN112523575A (en) * | 2020-12-09 | 2021-03-19 | 北京理工大学 | Storage box |
| CN112523575B (en) * | 2020-12-09 | 2024-10-11 | 北京理工大学 | Storage Box |
| KR20220106031A (en) * | 2021-01-21 | 2022-07-28 | 주식회사 파블로항공 | Method and apparatus for handling goods by unmanned aerial vehicle and autonomous robot |
| US11768491B2 (en) | 2021-01-21 | 2023-09-26 | Pablo Air Co., Ltd. | Method and apparatus for handling goods by unmanned aerial vehicle and autonomous vehicle |
| CN112810498A (en) * | 2021-03-02 | 2021-05-18 | 浙江树人学院(浙江树人大学) | Plant protection monitoring unmanned aerial vehicle base station system operation method and battery replacement device thereof |
| CN112810498B (en) * | 2021-03-02 | 2022-08-05 | 浙江树人学院(浙江树人大学) | Plant protection monitoring unmanned aerial vehicle base station system operation method and battery replacement device thereof |
| CN113085614A (en) * | 2021-04-16 | 2021-07-09 | 合肥革绿信息科技有限公司 | Unmanned aerial vehicle automatic charging pile for traffic management and use method thereof |
| KR20230009227A (en) * | 2021-07-08 | 2023-01-17 | 백형민 | Platform apparatus for drone |
| KR20230108021A (en) * | 2022-01-10 | 2023-07-18 | 이상우 | Underground Remote Automated Drone Ship System |
| WO2023172224A1 (en) * | 2022-03-07 | 2023-09-14 | Met İleri̇ Teknoloji̇ Si̇stemleri̇ Mühendi̇sli̇k İmalat İthalat Ve İhracat Ti̇caret Li̇mi̇ted Şi̇rketi̇ | An unmanned aerial vehicle maintenance station |
| KR102435994B1 (en) * | 2022-04-20 | 2022-08-25 | 주식회사 에이셉챌린지 | Drone station and drone station system using the drone station |
| KR102485588B1 (en) * | 2022-06-10 | 2023-01-09 | 한국전력기술 주식회사 | Vertiport system for UAM or drone autonomous take-off and landing |
| KR102468546B1 (en) * | 2022-08-08 | 2022-11-18 | 정경하 | Electric power supply apparatus management system for telegraph pole using IoT |
| KR20240060236A (en) | 2022-10-28 | 2024-05-08 | 한국항공우주연구원 | Unmanned vtol aircraft station for storage |
| KR102700645B1 (en) * | 2024-02-06 | 2024-08-28 | 한봉호 | A agricultural drone station installed in the cargo box of truck |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170138663A (en) | Drone Station | |
| JP7307120B2 (en) | Robot for transporting storage containers | |
| US10981672B2 (en) | Ground station device for a plurality of unmanned aircraft | |
| US20210371127A1 (en) | Aerial drone operations support base | |
| KR101792555B1 (en) | Unmanned drones automatic charging and containment system | |
| ES2901056T3 (en) | Charging station with multiple power sources | |
| WO2019000955A1 (en) | Battery charging and swapping station and battery swapping method | |
| KR20120081140A (en) | Supporting structure for an electric vehicle traction battery | |
| US11834181B2 (en) | Automatic aerial shipping system | |
| EP3196063B1 (en) | Electric vehicle comprising a lifting device for battery | |
| JP6375570B2 (en) | Unmanned aerial vehicle base station | |
| KR20190018133A (en) | Systems and methods for charging, transporting and operating flight machines | |
| CN110785352A (en) | System and method for air cargo transportation | |
| JP7045581B2 (en) | Auxiliary battery storage device for electric vehicles | |
| KR20180000810A (en) | System and method for auto-exchanging battery of unmanned air vehicle, and the unmanned air vehicle therefor | |
| CN104136287A (en) | Device for installing and uninstalling a vehicle battery | |
| KR20200012082A (en) | Dron station with top mounted battery replacement structure | |
| KR20140049041A (en) | Structure for storing motor vehicle batteries having a mechanism for locking the batteries in the storage cells | |
| EP2650251B1 (en) | Forklift truck | |
| KR20210089301A (en) | System for replacing battery of unmanned air vehicle in the air | |
| WO2020203929A1 (en) | Transport system, mobile body, transport method, transport program, and recording medium | |
| ES2306954T3 (en) | BATTERY SYSTEM, IN PARTICULAR FOR TRAINS. | |
| RU200137U1 (en) | Unmanned aerial vehicle base station | |
| JP2024531254A (en) | Cargo handling device, storage and retrieval system, and method | |
| WO2023041743A1 (en) | An energy storage system for a load handling device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |