KR20170084726A - 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 - Google Patents
무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 Download PDFInfo
- Publication number
- KR20170084726A KR20170084726A KR1020160003539A KR20160003539A KR20170084726A KR 20170084726 A KR20170084726 A KR 20170084726A KR 1020160003539 A KR1020160003539 A KR 1020160003539A KR 20160003539 A KR20160003539 A KR 20160003539A KR 20170084726 A KR20170084726 A KR 20170084726A
- Authority
- KR
- South Korea
- Prior art keywords
- umbilical cable
- cable
- unmanned submersible
- umbilical
- real
- Prior art date
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C9/00—Measuring inclination, e.g. by clinometers, by levels
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B17/00—Details of cameras or camera bodies; Accessories therefor
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
- G08B21/182—Level alarms, e.g. alarms responsive to variables exceeding a threshold
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B25/00—Alarm systems in which the location of the alarm condition is signalled to a central station, e.g. fire or police telegraphic systems
- G08B25/14—Central alarm receiver or annunciator arrangements
-
- B63B2702/10—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63G—OFFENSIVE OR DEFENSIVE ARRANGEMENTS ON VESSELS; MINE-LAYING; MINE-SWEEPING; SUBMARINES; AIRCRAFT CARRIERS
- B63G8/00—Underwater vessels, e.g. submarines; Equipment specially adapted therefor
- B63G8/001—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations
- B63G2008/002—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned
- B63G2008/005—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled
- B63G2008/007—Underwater vessels adapted for special purposes, e.g. unmanned underwater vessels; Equipment specially adapted therefor, e.g. docking stations unmanned remotely controlled by means of a physical link to a base, e.g. wire, cable or umbilical
Abstract
본 발명은, 수중(100)에 있는 무인잠수정(110)과 수면에 떠있는 모선(200) 사이에 연결되는 엄빌리컬 케이블(120) 중 상기 무인잠수정(110)에 설치된 인양 고리(112) 근처의 엄빌리컬 케이블(120) 상태를 실시간 감시하여 상기 엄빌리컬 케이블(120)의 상태감시정보를 상기 모선(200)으로 전송하는 장치로서,
부력이 있으며 상기 엄빌리컬 케이블(120)이 중앙을 관통하여 상기 엄빌리컬 케이블(120)을 따라 이동 가능하고 현재 위치에서 상기 엄빌리컬 케이블(120)의 아래쪽 및 위쪽을 촬영하고 자신의 자세를 감지하여 촬영정보 및 자세정보를 길이제한 엄빌리컬 케이블(140), 무인잠수정(110) 및 엄빌리컬 케이블(120)을 통해 상기 모선(200)에 설치된 운영시스템으로 전송하는 엄빌리컬 케이블 감시장치(130); 및
상기 엄빌리컬 케이블 감시장치(130)와 상기 무인잠수정(110) 사이에 일정 길이로 연결되어 상기 엄빌리컬 케이블 감시장치(130)와 상기 무인잠수정(110) 사이의 통신선로 기능을 수행하고 상기 엄빌리컬 케이블 감시장치(130)가 상기 무인잠수정(110)으로부터 일정 길이 내에서 멀어지거나 가까워지도록 하는 길이제한 엄빌리컬 케이블(140);
을 포함하는 것을 특징으로 한다.
부력이 있으며 상기 엄빌리컬 케이블(120)이 중앙을 관통하여 상기 엄빌리컬 케이블(120)을 따라 이동 가능하고 현재 위치에서 상기 엄빌리컬 케이블(120)의 아래쪽 및 위쪽을 촬영하고 자신의 자세를 감지하여 촬영정보 및 자세정보를 길이제한 엄빌리컬 케이블(140), 무인잠수정(110) 및 엄빌리컬 케이블(120)을 통해 상기 모선(200)에 설치된 운영시스템으로 전송하는 엄빌리컬 케이블 감시장치(130); 및
상기 엄빌리컬 케이블 감시장치(130)와 상기 무인잠수정(110) 사이에 일정 길이로 연결되어 상기 엄빌리컬 케이블 감시장치(130)와 상기 무인잠수정(110) 사이의 통신선로 기능을 수행하고 상기 엄빌리컬 케이블 감시장치(130)가 상기 무인잠수정(110)으로부터 일정 길이 내에서 멀어지거나 가까워지도록 하는 길이제한 엄빌리컬 케이블(140);
을 포함하는 것을 특징으로 한다.
Description
본 발명은 무인잠수정 인양 고리 근처의 엄빌리컬 케이블(Umbilical Cable) 상태 실시간 모니터링 장치에 관한 것이다.
엄빌리컬 케이블은 해양플랜트공학에 사용되는 복합케이블로 정의되며, 해양플랜트, 에너지 탐사 및 시추용, 무인잠수정용 등으로 사용된다.
예를 들어, 엄빌리컬 케이블은 모선과 수중해양장비 사이에 연결되어 수중해양장비로 전원 및 유압을 공급하거나 모선과 수중해양장비 사이의 통신선로 기능을 수행한다. 특히 엄빌리컬 케이블을 통해 동적 움직임이 많은 무인잠수정을 운용하는 경우 엄빌리컬 케이블의 엉킴 현상이 빈번하게 발생하고 이로 인해 엄빌리컬 케이블을 통한 통신의 불량 또는 엄빌리컬 케이블의 손상 문제가 발생할 가능성이 높다.
이와 같은 엄빌리컬 케이블 손상과 이로 인한 사고 예방을 위해 무인잠수정의 엄빌리컬 케이블에 부이(Buoy)를 부착하거나 무인잠수정의 상부에 카메라를 설치하여 운영자가 엄빌리컬 케이블의 상태를 수시로 감시하는 방식을 제시할 수 있다. 하지만 부이를 부착하는 방식은 대형 무인잠수정의 경우 큰 효과를 기대하기 어렵다. 굵고 무거운 엄빌리컬 케이블을 사용하는 무인잠수정은 그에 상응하는 큰 부이를 사용해야 하는데 이는 유영, 진수, 인양 등의 작업에 방해가 된다. 수중카메라를 이용한 감시기법은 운영자가 무인잠수정의 조종과 감시를 동시에 해야 하기 때문에 작업 효율이 떨어지고 심해의 시계가 좋지 않은 영역에서 사용이 힘들다는 단점이 있다.
이와 관련된 선행기술문헌 정보: 공개특허공보 제10-2015-0101757호(공개일자 2015년09월04일) "해저자원 채굴선의 작업을 위한 수중 로봇의 케이블 엉킴 방지 장치"
본 발명은 전술한 과제를 해결하기 위하여 안출한 것으로, 무인잠수정과 모선 사이에 연결되는 엄빌리컬 케이블 중 무인잠수정에 설치된 인양 고리 근처의 엄빌리컬 케이블 상태를 실시간 감시하여 엄빌리컬 케이블의 실시간 상태감시정보를 모선의 운영시스템으로 전송하여 운영자가 알 수 있도록 해서 운영자의 무인잠수정 안전조종에 도움이 되도록 하여 무인잠수정 및 엄빌리컬 케이블에 발생 가능한 2차 피해를 방지하도록 하기 위한 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치를 제공하는데 그 목적이 있다.
이와 같은 목적을 달성하기 위하여,
본 발명의 일 형태에 따르면,
수중에 있는 무인잠수정과 수면에 떠있는 모선 사이에 연결되는 엄빌리컬 케이블 중 상기 무인잠수정에 설치된 인양 고리 근처의 엄빌리컬 케이블 상태를 실시간 감시하여 상기 엄빌리컬 케이블의 상태감시정보를 상기 모선으로 전송하는 장치로서,
부력이 있으며 상기 엄빌리컬 케이블이 중앙을 관통하여 상기 엄빌리컬 케이블을 따라 이동 가능하고 현재 위치에서 상기 엄빌리컬 케이블의 아래쪽 및 위쪽을 촬영하고 자신의 자세를 감지하여 촬영정보 및 자세정보를 길이제한 엄빌리컬 케이블, 무인잠수정 및 엄빌리컬 케이블을 통해 상기 모선에 설치된 운영시스템으로 전송하는 엄빌리컬 케이블 감시장치; 및
상기 엄빌리컬 케이블 감시장치와 상기 무인잠수정 사이에 일정 길이로 연결되어 상기 엄빌리컬 케이블 감시장치와 상기 무인잠수정 사이의 통신선로 기능을 수행하고 상기 엄빌리컬 케이블 감시장치가 상기 무인잠수정으로부터 일정 길이 내에서 멀어지거나 가까워지도록 하는 길이제한 엄빌리컬 케이블;
을 포함하는 것을 특징으로 한다.
상기 엄빌리컬 케이블 감시장치는,
상기 엄빌리컬 케이블의 아래쪽을 촬영하는 제1 수중카메라;
상기 엄빌리컬 케이블의 위쪽을 촬영하는 제2 수중카메라; 및
자신의 자세를 감지하는 자세센서;
를 포함하는 것을 특징으로 한다.
상기 자세는 기울기인 것을 특징으로 한다.
상기 기울기는 X축, Y축, Z축에 대한 기울기인 것을 특징으로 한다.
상기 자세센서는 상기 기울기가 설정치를 초과하는 경우 상기 길이제한 엄빌리컬 케이블, 무인잠수정 및 엄빌리컬 케이블을 통해 상기 모선의 운영시스템으로 경보신호를 전송하여 운영시스템이 경보를 발생하도록 해서 상기 모선의 운영자가 해당 조치를 취하도록 하는 것을 특징으로 한다.
상기 자세센서는 AHRS(Attitude Heading Reference System)인 것을 특징으로 한다.
본 발명은, 무인잠수정(110)과 모선(200) 사이에 연결되는 엄빌리컬 케이블(120) 중 무인잠수정(110)에 설치된 인양 고리(112) 근처의 엄빌리컬 케이블(120) 상태를 실시간 감시하여 엄빌리컬 케이블(120)의 실시간 상태감시정보를 모선(200)의 운영시스템으로 전송하여 운영자가 알 수 있도록 해서 운영자의 무인잠수정 안전조종에 도움이 되도록 하여 무인잠수정(110) 및 엄빌리컬 케이블(120)에 발생 가능한 2차 피해를 방지하도록 하기 때문에, 무인잠수정(110)을 이용하는 작업의 효율이 높아지고 무인잠수정(110) 관련 유지보수를 위한 비용 및 시간이 절약되는 효과가 있다.
도 1은 본 발명에 따른 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치의 일 실시 예를 나타낸 도면이다.
도 2는 도 1에 도시된 엄빌리컬 케이블이 처지고 감긴 예를 나타낸 도면이다.
도 3은 도 1에 도시된 엄빌리컬 케이블 감시장치의 일 실시 예를 나타낸 도면이다.
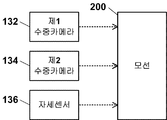
도 4는 도 3에 도시된 엄빌리컬 케이블 감시장치를 구성하는 제1, 제2 수중카메라 및 자세센서가 모선으로 엄빌리컬 케이블 감시정보를 제공하는 예를 간단히 나타낸 블록도이다.
도 5는 도 3에 도시된 엄빌리컬 케이블 감시장치를 구성하는 자세센서의 외형을 확대하여 나타낸 도면이다.
도 2는 도 1에 도시된 엄빌리컬 케이블이 처지고 감긴 예를 나타낸 도면이다.
도 3은 도 1에 도시된 엄빌리컬 케이블 감시장치의 일 실시 예를 나타낸 도면이다.
도 4는 도 3에 도시된 엄빌리컬 케이블 감시장치를 구성하는 제1, 제2 수중카메라 및 자세센서가 모선으로 엄빌리컬 케이블 감시정보를 제공하는 예를 간단히 나타낸 블록도이다.
도 5는 도 3에 도시된 엄빌리컬 케이블 감시장치를 구성하는 자세센서의 외형을 확대하여 나타낸 도면이다.
이하, 첨부된 도면을 참조하여 본 발명에 따른 실시 예를 상세히 설명하면 다음과 같다.
도 1은 본 발명에 따른 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치의 일 실시 예를 나타낸 도면으로, 수중(100)에 있는 무인잠수정(110), 엄빌리컬 케이블(120), 엄빌리컬 케이블 감시장치(130) 및 길이제한 엄빌리컬 케이블(140)로 구성된다.
이와 같은 본 발명을 도 2 내지 도 5를 참조하여 상세히 보면 다음과 같다.
도 2는 도 1에 도시된 엄빌리컬 케이블(120)이 처지고 감긴 예를 나타낸 도면이고 도 3은 도 1에 도시된 엄빌리컬 케이블 감시장치(130)의 일 실시 예를 나타낸 도면이다.
도 4는 도 3에 도시된 엄빌리컬 케이블 감시장치(130)를 구성하는 제1, 제2 수중카메라(132, 134) 및 자세센서(136)가 모선(200)으로 엄빌리컬 케이블(120) 감시정보를 제공하는 예를 간단히 나타낸 블록도이다.
도 5는 도 3에 도시된 엄빌리컬 케이블 감시장치(130)를 구성하는 자세센서(136)의 외형을 확대하여 나타낸 도면이다.
도 1 내지 도 5에 있어서, 엄빌리컬 케이블 감시장치(130)는 수중(100)에 있는 무인잠수정(110)과 수면에 떠있는 모선(200) 사이에 연결되는 엄빌리컬 케이블(120) 중 무인잠수정(110)에 설치된 인양 고리(112) 근처의 엄빌리컬 케이블(120) 상태를 실시간 감시하여 엄빌리컬 케이블(120)의 상태감시정보를 모선(200)으로 전송한다.
이와 같은 엄빌리컬 케이블 감시장치(130)는 부력이 있으며 엄빌리컬 케이블(120)이 중앙을 관통하여 엄빌리컬 케이블(120)을 따라 이동 가능하다.
엄빌리컬 케이블 감시장치(130) 내에 설치된 제1 수중카메라(132)는 현재 위치에서 엄빌리컬 케이블(120)의 아래쪽을 촬영한다.
엄빌리컬 케이블 감시장치(130) 내에 설치된 제2 수중카메라(134)는 현재 위치에서 엄빌리컬 케이블(120)의 위쪽을 촬영한다.
엄빌리컬 케이블 감시장치(130) 내에 설치된 자세센서(136)는 엄빌리컬 케이블 감시장치(130)의 자세를 감지한다. 여기서 자세센서(136)는 AHRS이고 자세는 X축, Y축, Z축에 대한 기울기이다.
이와 같은 자세센서(136)는 감지한 X축, Y축, Z축에 대한 기울기가 설정치를 초과하는 경우 길이제한 엄빌리컬 케이블(140), 무인잠수정(110) 및 엄빌리컬 케이블(120)을 통해 모선(200)의 운영시스템으로 경보신호를 전송하여 운영시스템이 경보를 발생하도록 해서 모선(200)의 운영자가 해당 조치를 취하도록 할 수 있다.
제1, 제2 수중카메라(132, 134) 및 자세센서(136)는 촬영정보 및 자세정보를 길이제한 엄빌리컬 케이블(140), 무인잠수정(110) 및 엄빌리컬 케이블(120)을 통해 모선(200)에 설치된 운영시스템으로 전송한다.
길이제한 엄빌리컬 케이블(140)은 엄빌리컬 케이블 감시장치(130)와 무인잠수정(110) 사이에 일정 길이로 연결되어 엄빌리컬 케이블 감시장치(130)와 무인잠수정(110) 사이의 통신선로 기능을 수행하고 엄빌리컬 케이블 감시장치(130)가 무인잠수정(110)으로부터 일정 길이 내에서 멀어지거나 가까워지도록 한다.
예를 들어, 엄빌리컬 케이블(120)이 곧게 펴져 있으면 엄빌리컬 케이블 감시장치(130)는 부력을 받아 길이제한 엄빌리컬 케이블(140)의 길이까지만 수면 쪽으로 올라간다.
즉, 엄빌리컬 케이블 감시장치(130)는 수심에 따라 길이제한 엄빌리컬 케이블(140)의 길이만큼만 위아래로 움직이게 된다.
이와 같은 본 발명은 무인잠수정(110)과 모선(200) 사이에 연결되는 엄빌리컬 케이블(120) 중 무인잠수정(110)에 설치된 인양 고리(112) 근처의 엄빌리컬 케이블(120) 상태를 실시간 감시하여 엄빌리컬 케이블(120)의 실시간 상태감시정보를 모선(200)의 운영시스템으로 전송하여 운영자가 알 수 있도록 해서 운영자의 무인잠수정 안전조종에 도움이 되도록 하여 무인잠수정(110) 및 엄빌리컬 케이블(120)에 발생 가능한 2차 피해를 방지하도록 하기 때문에, 무인잠수정(110)을 이용하는 작업의 효율이 높아지고 무인잠수정(110) 관련 유지보수를 위한 비용 및 시간이 절약되는 장점이 있다.
이상에서 본 발명에 대한 기술사상을 첨부도면과 함께 서술하였지만 이는 본 발명의 바람직한 실시 예를 예시적으로 설명한 것이지 본 발명을 한정하는 것은 아니다. 또한, 이 기술분야의 통상의 지식을 가진 자라면 누구나 본 발명의 기술사상의 범주를 이탈하지 않는 범위 내에서 다양한 변형 및 모방이 가능함은 명백한 사실이다.
100: 수중
110: 무인잠수정
120: 엄빌리컬 케이블
130: 엄빌리컬 케이블 감시장치
132, 134: 제1, 제2 수중카메라
136: 자세센서
140: 길이제한 엄빌리컬 케이블
200: 모선
110: 무인잠수정
120: 엄빌리컬 케이블
130: 엄빌리컬 케이블 감시장치
132, 134: 제1, 제2 수중카메라
136: 자세센서
140: 길이제한 엄빌리컬 케이블
200: 모선
Claims (6)
- 수중에 있는 무인잠수정과 수면에 떠있는 모선 사이에 연결되는 엄빌리컬 케이블 중 상기 무인잠수정에 설치된 인양 고리 근처의 엄빌리컬 케이블 상태를 실시간 감시하여 상기 엄빌리컬 케이블의 상태감시정보를 상기 모선으로 전송하는 장치로서,
부력이 있으며 상기 엄빌리컬 케이블이 중앙을 관통하여 상기 엄빌리컬 케이블을 따라 이동 가능하고 현재 위치에서 상기 엄빌리컬 케이블의 아래쪽 및 위쪽을 촬영하고 자신의 자세를 감지하여 촬영정보 및 자세정보를 길이제한 엄빌리컬 케이블, 무인잠수정 및 엄빌리컬 케이블을 통해 상기 모선에 설치된 운영시스템으로 전송하는 엄빌리컬 케이블 감시장치; 및
상기 엄빌리컬 케이블 감시장치와 상기 무인잠수정 사이에 일정 길이로 연결되어 상기 엄빌리컬 케이블 감시장치와 상기 무인잠수정 사이의 통신선로 기능을 수행하고 상기 엄빌리컬 케이블 감시장치가 상기 무인잠수정으로부터 일정 길이 내에서 멀어지거나 가까워지도록 하는 길이제한 엄빌리컬 케이블;
을 포함하는 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
- 청구항 1에 있어서,
상기 엄빌리컬 케이블 감시장치는,
상기 엄빌리컬 케이블의 아래쪽을 촬영하는 제1 수중카메라;
상기 엄빌리컬 케이블의 위쪽을 촬영하는 제2 수중카메라; 및
자신의 자세를 감지하는 자세센서;
를 포함하는 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
- 청구항 2에 있어서,
상기 자세는 기울기인 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
- 청구항 3에 있어서,
상기 기울기는 X축, Y축, Z축에 대한 기울기인 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
- 청구항 3에 있어서,
상기 자세센서는 상기 기울기가 설정치를 초과하는 경우 상기 길이제한 엄빌리컬 케이블, 무인잠수정 및 엄빌리컬 케이블을 통해 상기 모선의 운영시스템으로 경보신호를 전송하여 운영시스템이 경보를 발생하도록 해서 상기 모선의 운영자가 해당 조치를 취하도록 하는 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
- 청구항 2에 있어서,
상기 자세센서는 AHRS인 것을 특징으로 하는 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003539A KR20170084726A (ko) | 2016-01-12 | 2016-01-12 | 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160003539A KR20170084726A (ko) | 2016-01-12 | 2016-01-12 | 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170084726A true KR20170084726A (ko) | 2017-07-21 |
Family
ID=59462762
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160003539A KR20170084726A (ko) | 2016-01-12 | 2016-01-12 | 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20170084726A (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110588924A (zh) * | 2019-09-27 | 2019-12-20 | 广州黄船海洋工程有限公司 | 一种脐带缆防破损连接装置 |
| KR20220149277A (ko) * | 2021-04-30 | 2022-11-08 | 동명대학교산학협력단 | 수중드론의 엄빌리컬 케이블 상태 모니터링 시스템 |
| KR20220149276A (ko) * | 2021-04-30 | 2022-11-08 | 동명대학교산학협력단 | 수중드론을 이용한 엄빌리컬 케이블 엉킴방지장치 |
-
2016
- 2016-01-12 KR KR1020160003539A patent/KR20170084726A/ko not_active Application Discontinuation
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110588924A (zh) * | 2019-09-27 | 2019-12-20 | 广州黄船海洋工程有限公司 | 一种脐带缆防破损连接装置 |
| KR20220149277A (ko) * | 2021-04-30 | 2022-11-08 | 동명대학교산학협력단 | 수중드론의 엄빌리컬 케이블 상태 모니터링 시스템 |
| KR20220149276A (ko) * | 2021-04-30 | 2022-11-08 | 동명대학교산학협력단 | 수중드론을 이용한 엄빌리컬 케이블 엉킴방지장치 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101323824B1 (ko) | 수중 로봇 운용 장치 | |
| KR101236849B1 (ko) | 해저로봇 운용 시스템 및 그 방법 | |
| KR101416141B1 (ko) | 수중 로봇의 작업지원 플랫폼 및 그 방법 | |
| US10766577B2 (en) | System and method of operating a subsea module | |
| FI129378B (en) | Equipment and method for automatic handling of mooring ropes | |
| EP3345823B1 (en) | Coupling device for recovering unmanned ship and coupling control method using same | |
| NO317224B1 (no) | Undervannsrel± for kraft og data | |
| WO1985003269A1 (en) | Remotely operated underwater vehicle | |
| WO2015049679A1 (en) | Launch and recovery system and method | |
| KR20170084726A (ko) | 무인잠수정 인양 고리 근처의 엄빌리컬 케이블 상태 실시간 모니터링 장치 | |
| KR101277002B1 (ko) | 무인수상로봇 | |
| JP5884978B2 (ja) | 水中航走体の揚収装置及び揚収方法 | |
| JP2006019305A (ja) | ケーブル接続装置及び水中複合構造体 | |
| CN105060133A (zh) | 一种水下探测设备的布放与回收装置及其布放、回收方法 | |
| KR101258955B1 (ko) | 수중 로봇 시스템 | |
| CN213768912U (zh) | 海上多功能智能打捞系统 | |
| KR102533392B1 (ko) | 충돌방지부를 구비한 수중무인 탐사기 진회수장치 | |
| KR101422699B1 (ko) | 수중 스테이션 및 수중 운동체 운용 시스템 | |
| US20220380009A1 (en) | Splash zone inspection robot | |
| KR20150144517A (ko) | 수중케이블에 연결된 수중로봇의 이상감지장치 | |
| JP6354852B2 (ja) | 防護材設置方法及び防護材設置装置 | |
| KR101411940B1 (ko) | 수중 스테이션 및 수중 운동체 운용 방법 | |
| KR20130052346A (ko) | 인양장치를 구비한 선박 및 그의 인양방법 | |
| KR101757715B1 (ko) | 무인잠수정의 수면 근처에서 작업 시 엄빌리컬 케이블 엉킴 방지장치 | |
| KR101628574B1 (ko) | 석션 원리를 이용한 탈부착 가능한 석션 무어링 장치와 그 분리 및 설치 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |