KR20170080481A - 다차선 차량 속도 측정 시스템 - Google Patents
다차선 차량 속도 측정 시스템 Download PDFInfo
- Publication number
- KR20170080481A KR20170080481A KR1020160173721A KR20160173721A KR20170080481A KR 20170080481 A KR20170080481 A KR 20170080481A KR 1020160173721 A KR1020160173721 A KR 1020160173721A KR 20160173721 A KR20160173721 A KR 20160173721A KR 20170080481 A KR20170080481 A KR 20170080481A
- Authority
- KR
- South Korea
- Prior art keywords
- vehicle
- image
- cropping
- speed
- license plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images










Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/052—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed
- G08G1/054—Detecting movement of traffic to be counted or controlled with provision for determining speed or overspeed photographing overspeeding vehicles
-
- G06K9/3283—
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V30/00—Character recognition; Recognising digital ink; Document-oriented image-based pattern recognition
- G06V30/10—Character recognition
- G06V30/14—Image acquisition
- G06V30/146—Aligning or centring of the image pick-up or image-field
- G06V30/1475—Inclination or skew detection or correction of characters or of image to be recognised
- G06V30/1478—Inclination or skew detection or correction of characters or of image to be recognised of characters or characters lines
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Traffic Control Systems (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
Description
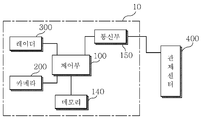
도 2는 도 1의 본 발명의 일실시예에 따른 다차선 차량 속도 측정 시스템의 상세 블록도이다.
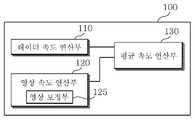
도 3은 도 2의 제어부의 일 실시예를 나타내는 블록도이다.
도 4는 제어부의 속도 연산 방법을 나타내는 순서도이다.
도 5는 영상 속도 연산부의 인식영역 획득하는 단계를 나타내는 그림이다.
도 6은 도 4의 인식 영역에 대한 보정을 나타내는 순서도이다.
도 7은 도 6의 좌표 수득을 나타내는 그림이다.
도 8은 도 6의 역차량기준좌표 수득을 나타내는 그림이다.
도 9는 도 6의 번호판 보정을 나타내는 상세 순서도이다.
도 10은 도 9의 번호판 특징 추출하는 동작을 나타내는 그림이다.
도 11은 도 9의 차종분석을 나타내는 그림이다.
도 12는 도 9의 번호판 높이 측정을 나타내는 그림이다.
Claims (9)
- 다차선 도로 및 상기 타겟차량을 포함하는 풀프레임영상을 촬영하는 영상촬영수단,
상기 타겟차량의 상기 주행정보를 분석하여 상기 다차선 도로상의 풀프레임영상에서 상기 타겟차량의 위치를 파악하고, 상기 다차선 도로상의 풀프레임영상에서 상기 차량이 위치한 영역을 크롭핑(cropping)하여 제1 크롭핑영상으로 저장하고, 상기 제1 크롭핑영상으로부터 상기 타겟차량의 번호판을 인식하여 상기 번호판이 위치한 영역을 크롭핑하여 제2 크롭핑영상으로 저장하는 영상처리부, 그리고
상기 영상처리부로부터 소정의 시간간격으로 촬영된 영상들을 전달받아 상기 타겟 차량이 제1 크롭핑영상 좌표계에서의 차지하는 제1 좌표값을 풀프레임영상 좌표계에서 차지하는 제2 좌표값으로 변환하고, 상기 제2 좌표값의 시간에 따른 이동거리를 계산하여 차량의 속도를 연산하는 영상속도연산부를 포함하는 제어부
를 포함하는 다차선 차량 속도 측정 시스템. - 제1항에 있어서,
상기 영상 속도 연산부는,
상기 시간차를 두고 2회에 걸쳐 촬영된 영상들로부터 크롭핑된 상기 제1 크롭핑 영상들로부터 각각의 차량 번호판의 위치를 판별하며, 상기 번호판 위치를 기준으로 상기 차량 속도를 연산하는 다차선 차량 속도 측정 시스템. - 제2항에 있어서,
상기 영상 속도 연산부는
상기 제2 좌표값에 수직 보정 및 수평 보정을 포함하는 보상을 수행하는 영상 보정부
를 포함하는 다차선 차량 속도 측정 시스템. - 제3항에 있어서,
상기 보상은 상기 제2좌표값의 상기 풀프레임 내에서 차지하는 위치에 따라 픽셀의 가중치를 곱하여 이루어지는 다차선 차량 속도 측정 시스템. - 제4항에 있어서,
상기 영상 보정부는
상기 제2 좌표값을 포함하는 상기 번호판에 대한 오차를 보상하는 번호판 보상을 진행하며,
상기 번호판 보상은 번호판의 특성 및 차종을 판단하여 진행되는 다차선 차량 속도 측정 시스템. - 제5항에 있어서,
상기 번호판의 특성은 번호판의 크기, 가로세로비율, 색깔 및 번호판의 타이어 밑단으로부터의 높이를 포함하는 다차선 차량 속도 측정 시스템. - 제5항에 있어서,
상기 차종은 헤드라이트 사이의 간격에 따른 차량의 폭의 계산으로 판단하는 다차선 차량 속도 측정 시스템. - 제1항에 있어서,
다차선 도로에 방사파를 출사하고, 다차선 도로를 주행하는 차량으로부터 반사되는 반사파를 수신하는 레이더, 그리고
상기 레이더로부터의 반사파를 수신하고, 이를 판독하여 상기 차량 속도를 연산하는 레이더 속도 연산부를 더 포함하는 다차선 차량 속도 측정 시스템. - 다차선 도로 및 상기 타겟차량을 포함하는 풀프레임영상을 촬영하는 단계,
상기 타겟차량의 상기 주행정보를 분석하여 상기 다차선 도로상의 풀프레임영상에서 상기 타겟차량의 위치를 파악하고, 상기 다차선 도로상의 풀프레임영상에서 상기 차량이 위치한 영역을 크롭핑(cropping)하여 제1 크롭핑영상으로 저장하고, 상기 제1 크롭핑영상으로부터 상기 타겟차량의 번호판을 인식하여 상기 번호판이 위치한 영역을 크롭핑하여 제2 크롭핑영상으로 저장단계, 그리고
소정의 시간간격으로 촬영된 영상들을 전달받아 상기 타겟 차량이 제1 크롭핑영상 좌표계에서의 차지하는 제1 좌표값을 풀프레임영상 좌표계에서 차지하는 제2 좌표값으로 변환하고, 상기 제2 좌표값의 시간에 따른 이동거리를 계산하여 차량의 속도를 연산하는 단계
를 포함하는 다차선 차량 속도 측정 방법.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20150190076 | 2015-12-30 | ||
| KR1020150190076 | 2015-12-30 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170080481A true KR20170080481A (ko) | 2017-07-10 |
| KR101898051B1 KR101898051B1 (ko) | 2018-09-12 |
Family
ID=59356112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160173721A Active KR101898051B1 (ko) | 2015-12-30 | 2016-12-19 | 다차선 차량 속도 측정 시스템 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101898051B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102052833B1 (ko) | 2018-07-17 | 2019-12-09 | 김항섭 | 영상 추적을 이용한 차량 속도 검출 장치 및 방법 |
| KR102100965B1 (ko) * | 2019-05-27 | 2020-04-14 | 주식회사 엔슨소프트 | 카메라 내장형 다차로 차량정보 분석 시스템 및 그 방법 |
| KR102161516B1 (ko) * | 2020-04-27 | 2020-10-05 | 주식회사 펜타게이트 | 딥러닝 기반의 데이터 확장학습을 이용한 차종 분류 방법 |
| KR20220009608A (ko) | 2020-07-16 | 2022-01-25 | 주식회사 비젼그리드 | 영상 추적을 이용한 차량 속도 검출을 위한 가상 곡선 격자선 생성 방법 및 장치 |
| KR20220042623A (ko) * | 2020-09-28 | 2022-04-05 | 인하대학교 산학협력단 | 심층 학습을 이용한 영상 기반 속도 단속 시스템 |
| KR102459996B1 (ko) * | 2021-12-02 | 2022-10-28 | 주식회사 케이티앤씨 | 차량 속도 측정을 위한 자동 캘리브레이션 장치 및 방법 |
| KR102477410B1 (ko) * | 2022-09-08 | 2022-12-15 | 주식회사 아프로시스템즈 | 자동차 후면 번호판 인식을 이용한 무인 단속 시스템 및 자동차 후면 번호판 인식방법 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102238401B1 (ko) * | 2020-09-14 | 2021-04-09 | 전주비전대학교산학협력단 | 데이터 확장 및 cnn을 이용한 차량번호 인식 방법 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0883393A (ja) * | 1994-09-14 | 1996-03-26 | Hitachi Ltd | 車速測定装置 |
| JP2000241440A (ja) * | 1999-02-19 | 2000-09-08 | Fujitsu Ltd | 車速計測方法および装置 |
| KR100884583B1 (ko) * | 2007-08-28 | 2009-02-19 | 경북대학교 산학협력단 | 속도 검출 시스템 및 방법 |
| KR101291301B1 (ko) * | 2013-02-28 | 2013-07-30 | 심광호 | 영상 및 레이더를 이용한 차량 속도 측정시스템 |
-
2016
- 2016-12-19 KR KR1020160173721A patent/KR101898051B1/ko active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0883393A (ja) * | 1994-09-14 | 1996-03-26 | Hitachi Ltd | 車速測定装置 |
| JP2000241440A (ja) * | 1999-02-19 | 2000-09-08 | Fujitsu Ltd | 車速計測方法および装置 |
| KR100884583B1 (ko) * | 2007-08-28 | 2009-02-19 | 경북대학교 산학협력단 | 속도 검출 시스템 및 방법 |
| KR101291301B1 (ko) * | 2013-02-28 | 2013-07-30 | 심광호 | 영상 및 레이더를 이용한 차량 속도 측정시스템 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102052833B1 (ko) | 2018-07-17 | 2019-12-09 | 김항섭 | 영상 추적을 이용한 차량 속도 검출 장치 및 방법 |
| KR102100965B1 (ko) * | 2019-05-27 | 2020-04-14 | 주식회사 엔슨소프트 | 카메라 내장형 다차로 차량정보 분석 시스템 및 그 방법 |
| KR102161516B1 (ko) * | 2020-04-27 | 2020-10-05 | 주식회사 펜타게이트 | 딥러닝 기반의 데이터 확장학습을 이용한 차종 분류 방법 |
| KR20220009608A (ko) | 2020-07-16 | 2022-01-25 | 주식회사 비젼그리드 | 영상 추적을 이용한 차량 속도 검출을 위한 가상 곡선 격자선 생성 방법 및 장치 |
| KR20220042623A (ko) * | 2020-09-28 | 2022-04-05 | 인하대학교 산학협력단 | 심층 학습을 이용한 영상 기반 속도 단속 시스템 |
| KR102459996B1 (ko) * | 2021-12-02 | 2022-10-28 | 주식회사 케이티앤씨 | 차량 속도 측정을 위한 자동 캘리브레이션 장치 및 방법 |
| KR102477410B1 (ko) * | 2022-09-08 | 2022-12-15 | 주식회사 아프로시스템즈 | 자동차 후면 번호판 인식을 이용한 무인 단속 시스템 및 자동차 후면 번호판 인식방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101898051B1 (ko) | 2018-09-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101925293B1 (ko) | 레이더 및 영상 융합 차량 단속시스템 | |
| KR101898051B1 (ko) | 다차선 차량 속도 측정 시스템 | |
| US11348266B2 (en) | Estimating distance to an object using a sequence of images recorded by a monocular camera | |
| EP3792660B1 (en) | Method, apparatus and system for measuring distance | |
| KR101411668B1 (ko) | 교정 장치, 거리 측정 시스템, 교정 방법, 및 교정 프로그램을 기록한 컴퓨터 판독 가능한 기록 매체 | |
| US8378851B2 (en) | Fusion of images in enhanced obstacle detection | |
| US8964031B2 (en) | Method and system for measuring the speed of a vehicle | |
| US10015394B2 (en) | Camera-based speed estimation and system calibration therefor | |
| EP2639781A1 (en) | Vehicle with improved traffic-object position detection | |
| WO2017116134A1 (ko) | 레이더 및 영상 융합 차량 단속시스템 | |
| US20050232463A1 (en) | Method and apparatus for detecting a presence prior to collision | |
| JPH07320199A (ja) | 車両用障害物検出装置 | |
| KR101735557B1 (ko) | 실시간 목표 탐지에 의한 교통 정보 수집 시스템 및 방법 | |
| JP3727400B2 (ja) | 横断者の検出装置 | |
| CN102806913A (zh) | 一种新型的车道线偏离检测方法及装置 | |
| US20050270286A1 (en) | Method and apparatus for classifying an object | |
| KR102062579B1 (ko) | 영상 보정을 통해 그림자 및 빛 반사로 훼손된 차량번호판을 인식하는 차량번호판 인식 시스템 | |
| KR20170079463A (ko) | 레이더 및 영상 융합 차량 단속시스템 | |
| CN110659551A (zh) | 运动状态的识别方法、装置及车辆 | |
| JP7312275B2 (ja) | 情報処理装置、センシング装置、移動体、情報処理方法、及び、情報処理システム | |
| KR20210108550A (ko) | 스테레오 카메라 기반 고정식 차량 속도 측정 방법 | |
| KR101890482B1 (ko) | 레이더 스펙트럼을 이용한 정지 및 이동 물체 판별 장치 및 그 방법 | |
| US12340539B2 (en) | Calibration of camera-based height assessment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application |
Patent event code: PA01091R01D Comment text: Patent Application Patent event date: 20161219 |
|
| PA0201 | Request for examination | ||
| PG1501 | Laying open of application | ||
| A302 | Request for accelerated examination | ||
| PA0302 | Request for accelerated examination |
Patent event date: 20180420 Patent event code: PA03022R01D Comment text: Request for Accelerated Examination Patent event date: 20161219 Patent event code: PA03021R01I Comment text: Patent Application |
|
| PN2301 | Change of applicant |
Patent event date: 20180430 Comment text: Notification of Change of Applicant Patent event code: PN23011R01D |
|
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection |
Comment text: Notification of reason for refusal Patent event date: 20180514 Patent event code: PE09021S01D |
|
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration |
Patent event code: PE07011S01D Comment text: Decision to Grant Registration Patent event date: 20180821 |
|
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment |
Comment text: Registration of Establishment Patent event date: 20180906 Patent event code: PR07011E01D |
|
| PR1002 | Payment of registration fee |
Payment date: 20180906 End annual number: 3 Start annual number: 1 |
|
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee |
Payment date: 20210705 Start annual number: 4 End annual number: 4 |
|
| PR1001 | Payment of annual fee |
Payment date: 20220706 Start annual number: 5 End annual number: 5 |
|
| PR1001 | Payment of annual fee |
Payment date: 20230705 Start annual number: 6 End annual number: 6 |
|
| PR1001 | Payment of annual fee |
Payment date: 20240703 Start annual number: 7 End annual number: 7 |
|
| PR1001 | Payment of annual fee |
Payment date: 20250703 Start annual number: 8 End annual number: 8 |