KR20170074033A - 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 - Google Patents
의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 Download PDFInfo
- Publication number
- KR20170074033A KR20170074033A KR1020150183012A KR20150183012A KR20170074033A KR 20170074033 A KR20170074033 A KR 20170074033A KR 1020150183012 A KR1020150183012 A KR 1020150183012A KR 20150183012 A KR20150183012 A KR 20150183012A KR 20170074033 A KR20170074033 A KR 20170074033A
- Authority
- KR
- South Korea
- Prior art keywords
- patient
- signal
- motion
- magnetic resonance
- pattern
- Prior art date
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56509—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to motion, displacement or flow, e.g. gradient moment nulling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/0033—Features or image-related aspects of imaging apparatus classified in A61B5/00, e.g. for MRI, optical tomography or impedance tomography apparatus; arrangements of imaging apparatus in a room
-
- A61B5/0488—
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/316—Modalities, i.e. specific diagnostic methods
- A61B5/389—Electromyography [EMG]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/72—Signal processing specially adapted for physiological signals or for diagnostic purposes
- A61B5/7203—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal
- A61B5/7207—Signal processing specially adapted for physiological signals or for diagnostic purposes for noise prevention, reduction or removal of noise induced by motion artifacts
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/32—Excitation or detection systems, e.g. using radio frequency signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/543—Control of the operation of the MR system, e.g. setting of acquisition parameters prior to or during MR data acquisition, dynamic shimming, use of one or more scout images for scan plane prescription
Landscapes
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Biomedical Technology (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- High Energy & Nuclear Physics (AREA)
- Radiology & Medical Imaging (AREA)
- Signal Processing (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Artificial Intelligence (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physiology (AREA)
- Psychiatry (AREA)
Abstract
근전도 신호를 측정하여 환자의 움직임을 감지함으로써, 모션 아티팩트를 미리 예측할 수 있는 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법을 제공한다.
일 실시예에 따른 자기 공명 영상 장치는, 환자에 자기장 및 RF 신호를 인가하여 자기 공명 신호를 획득하는 스캐너; 상기 환자의 근전도 신호를 측정하는 신호 측정부; 상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부; 및 상기 자기 공명 신호를 저장하고, 상기 저장된 자기 공명 신호를 이용하여 자기 공명 영상을 재구성하는 데이터 처리부;를 포함한다.
일 실시예에 따른 자기 공명 영상 장치는, 환자에 자기장 및 RF 신호를 인가하여 자기 공명 신호를 획득하는 스캐너; 상기 환자의 근전도 신호를 측정하는 신호 측정부; 상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부; 및 상기 자기 공명 신호를 저장하고, 상기 저장된 자기 공명 신호를 이용하여 자기 공명 영상을 재구성하는 데이터 처리부;를 포함한다.
Description
의료 영상에 나타난 모션 아티팩트를 보정할 수 있는 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법에 관한 것이다.
의료영상 장치는 진단 또는 시술의 목적으로 대상체의 내부를 영상화하는 장치로서, 자기 공명 영상(MRI: Magnetic Resonance Imaging) 장치, 라디오그래피(radiography) 장치, 맘모그래피(mammography) 장치, 양전자 단층촬영(PET: Positron Emission Tomography) 장치, 컴퓨터 단층촬영(CT: Computed Tomography) 장치, 단일광자 단층촬영(SPECT: Single Photon Emission Computed Tomography) 장치, 광 간섭성 단층촬영(OCT: Optical Coherence Tomography) 등 다양한 종류(modality)의 장치들이 있다.
어느 의료 영상 장치를 사용하더라도 의료 영상 촬영 중에 대상체가 움직이게 되면, 움직임에 의한 아티팩트(artifact), 즉 모션 아티팩트(motion artifact)가 의료 영상에 나타날 수 있다. 특히, 자기 공명 영상이나 컴퓨터 단층 영상과 같이 촬영하는 데 상대적으로 긴 시간이 소요되는 모달리티의 경우, 모션 아티팩트의 발생 가능성이 높고, 모션 아티팩트는 의료 영상의 품질을 떨어뜨는 요인이 될 수 있다.
근전도 신호를 측정하여 환자의 움직임을 감지함으로써, 모션 아티팩트를 미리 예측할 수 있는 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법을 제공한다.
일 실시예에 따른 자기 공명 영상 장치는, 환자에 자기장 및 RF 신호를 인가하여 자기 공명 신호를 획득하는 스캐너; 상기 환자의 근전도 신호를 측정하는 신호 측정부; 상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부; 및 상기 자기 공명 신호를 저장하고, 상기 저장된 자기 공명 신호를 이용하여 자기 공명 영상을 재구성하는 데이터 처리부;를 포함한다.
상기 제어부는, 상기 모션 아티팩트의 발생이 예측되면, 상기 자기 공명 신호를 재획득하도록 상기 스캐너를 제어할 수 있다.
상기 제어부는, 상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 움직임 발생 시점에 대응되는 자기 공명 신호를 재획득하도록 상기 스캐너를 제어할 수 있다.
상기 데이터 처리부는, 상기 저장된 자기 공명 신호 중에서 상기 환자의 움직임 발생 시점에 획득된 자기 공명 신호를 삭제하고, 상기 재획득된 자기 공명 신호를 이용하여 상기 자기 공명 영상을 재구성 할 수 있다.
상기 데이터 처리부는, 상기 모션 아티팩트의 발생이 예측되면, 상기 자기 공명 영상에 후처리를 적용하여 상기 모션 아티팩트를 보정 할 수 있다..
상기 신호 측정부는, 상기 자기 공명 신호가 획득되는 촬영 부위와 관련된 부위에 부착되는 적어도 하나의 측정 센서를 포함 할 수 있다.
상기 신호 측정부는, 상기 자기 공명 신호의 획득이 시작되기 전부터 상기 환자의 근전도 신호를 측정할 수 있다.
상기 제어부는, 상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호를 상기 자기 공명 신호의 획득이 시작되기 전에 측정된 상기 환자의 근전도 신호를 이용하여 필터링 할 수 있다.
상기 제어부는, 상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 움직임 패턴을 획득하고, 상기 환자의 움직임 패턴은, 상기 환자의 움직임 특성을 포함할 수 있다.
상기 환자의 움직임 패턴은, 상기 환자의 움직임의 크기 및 상기 환자의 움직임의 종류 중 적어도 하나에 관한 정보를 포함 할 수 있다.
상기 제어부는, 상기 자기 공명 신호의 획득이 시작되기 전에 측정된 상기 환자의 근전도 신호에 패턴 학습을 적용하여 패턴 분류기를 생성 할 수 있다.
상기 제어부는, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측 할 수 있다.
상기 제어부는, 상기 근전도 신호의 측정 시간이 기준시간 미만이면, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측 할 수 있다.
상기 제어부는, 상기 근전도 신호의 측정 시간이 기준시간 이상이면, 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득 할 수 있다.
일 실시예에 따른 의료 영상 장치는 환자를 스캔하여 의료 영상 신호를 획득하는 스캐너; 상기 환자의 근전도 신호를 측정하는 신호 측정부; 및 상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부;를 포함한다.
상기 신호 측정부는, 상기 자기 공명 신호의 획득이 시작되기 전부터 상기 환자의 근전도 신호를 측정 할 수 있다.
상기 제어부는, 상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득하고, 상기 환자의 움직임 패턴은, 상기 환자의 움직임 특성을 포함 할 수 있다.
상기 제어부는, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측 할 수 있다.
상기 제어부는, 상기 근전도 신호의 측정 시간이 기준시간 미만이면, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측 할 수 있다.
상기 제어부는, 상기 근전도 신호의 측정 시간이 기준시간 이상이면, 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득할 수 있다.
일 실시예에 따른 자기 공명 영상 장치의 제어방법은, 환자의 근전도 신호를 측정하고; 상기 환자에 대한 자기 공명 촬영을 수행하고; 상기 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고; 상기 환자의 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측하는 것을 포함한다.
상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 움직임 발생 시점에 대응되는 자기 공명 신호를 재획득하는 것;을 더 포함 할 수 있다.
상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 자기 공명 영상에 후처리를 적용하여 상기 모션 아티팩트를 보정하는 것;을 더 포함 할 수 있다.
상기 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하는 것은, 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 움직임 패턴을 획득하는 것;을 포함 할 수 있다.
상기 환자의 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측하는 것은, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 것을 포함 할 수 있다.
일 실시예에 따른 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법에 의하면, 근전도 신호를 측정하여 환자의 모션을 감지함으로써, 모션 아티팩트를 미리 예측할 수 있다.
도 1은 일 실시예에 따른 의료 영상 장치의 제어 블록도이다.
도 2는 일 실시예에 따른 자기 공명 영상 장치의 제어 블록도이다.
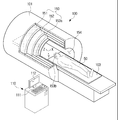
도 3a 및 도 3b는 자기공명영상장치의 외관을 개략적으로 나타낸 도면이다.
도 4는 대상체가 놓여 있는 공간을 X, Y, Z 축으로 구분한 도면이다.
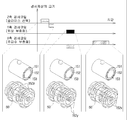
도 5는 스캐너의 구조와 경사 코일의 구조를 나타낸 도면이다.
도 6은 경사 코일의 동작과 관련된 펄스 시퀀스를 도시한 도면이다.
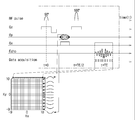
도 7은 스핀 에코 펄스 시퀀스를 사용하는 경우의 펄스 시퀀스 다이어그램이다.
도 8은 z축 경사 자장의 크기를 달리하여 여러 번 획득되는 에코 신호와 k-공간의 관계를 나타낸 도면이다.
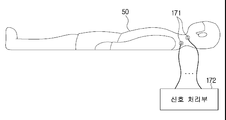
도 9 및 도 10은 환자의 근전도 신호를 측정하는 신호 측정부의 구성을 나타낸 도면이다.
도 11은 신호 처리부의 구성을 나타낸 일 예시에 관한 도면이다.
도 12및 도 13은 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 관한 순서도이다.
도 14는 일 실시예에 따른 자기 공명 영상 장치에 있어서, 패턴 분류를 이용하여 모션 아티팩트의 발생을 예측하는 예시에 관한 순서도이다.
도 15는 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 있어서, 환자로부터 획득한 근전도 신호를 이용하여 패턴을 학습하는 예시에 관한 순서도이다.
도 2는 일 실시예에 따른 자기 공명 영상 장치의 제어 블록도이다.
도 3a 및 도 3b는 자기공명영상장치의 외관을 개략적으로 나타낸 도면이다.
도 4는 대상체가 놓여 있는 공간을 X, Y, Z 축으로 구분한 도면이다.
도 5는 스캐너의 구조와 경사 코일의 구조를 나타낸 도면이다.
도 6은 경사 코일의 동작과 관련된 펄스 시퀀스를 도시한 도면이다.
도 7은 스핀 에코 펄스 시퀀스를 사용하는 경우의 펄스 시퀀스 다이어그램이다.
도 8은 z축 경사 자장의 크기를 달리하여 여러 번 획득되는 에코 신호와 k-공간의 관계를 나타낸 도면이다.
도 9 및 도 10은 환자의 근전도 신호를 측정하는 신호 측정부의 구성을 나타낸 도면이다.
도 11은 신호 처리부의 구성을 나타낸 일 예시에 관한 도면이다.
도 12및 도 13은 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 관한 순서도이다.
도 14는 일 실시예에 따른 자기 공명 영상 장치에 있어서, 패턴 분류를 이용하여 모션 아티팩트의 발생을 예측하는 예시에 관한 순서도이다.
도 15는 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 있어서, 환자로부터 획득한 근전도 신호를 이용하여 패턴을 학습하는 예시에 관한 순서도이다.
이하, 첨부된 도면을 참조하여 일 측면에 따른 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법의 실시예를 상세하게 설명한다.
도 1은 일 실시예에 따른 의료 영상 장치의 제어 블록도이다.
도 1을 참조하면, 일 실시예에 따른 의료 영상 장치(100)는 의료 영상을 획득하기 위해 대상체를 스캔하는 스캐너(150), 스캐너(150)의 동작을 제어하는 제어부(120), 스캐너(150)가 대상체를 스캔하여 획득한 데이터를 처리하여 의료 영상을 획득하는 데이터 처리부(160), 스캔 또는 데이터 처리에 관한 사용자의 제어 명령을 입력 받는 사용자 인터페이스(110), 대상체의 근전도 (Electromyography:EMG) 신호를 측정하고, 측정된 근전도 신호를 처리하여 제어부(120)로 전달하는 신호 측정부(170)를 포함한다.
근전도 신호는 근육이 탈분극 할 때 발생하는 전기 신호로서, 근육이 수축하고 이완함에 따라 근전도 신호의 특성이 바뀌기 때문에 근전도 신호를 분석하면 대상체의 자세나 움직임 등을 추정할 수 있다.
따라서, 일 실시예에 따른 의료 영상 장치(100)에서는 신호 측정부(170)를 이용하여 대상체의 근전도 신호를 측정할 수 있고, 측정된 근전도 신호가 제어부(120)로 전달되면, 제어부(120)는 근전도 신호에 기초하여 대상체의 움직임 특성을 판단하고, 대상체의 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다. 여기서, 모션 아티팩트의 발생 여부를 판단하는 것은, 모션 아티팩트의 발생 가능성을 판단하는 것을 의미한다.
제어부(120)는 모션 아티팩트의 발생이 예측되면, 재촬영을 수행하거나 모션 아티팩트의 보정을 위한 영상 후처리를 수행하는 등 적절한 대응을 위한 동작을 수행할 수 있다.
이하, 의료 영상 장치(100) 각 구성요소의 구체적인 동작을 설명한다. 한편, 후술하는 실시예에서는 구체적인 편의를 위해 특정 모달리티를 예로 들어 설명하는바, 촬영에 장시간이 소요되어 모션 아티팩트의 발생 가능성이 높은 자기 공명 영상 장치를 예로 들어 설명한다.
도 2는 일 실시예에 따른 자기 공명 영상 장치의 제어 블록도이다.
도 2를 참조하면, 스캐너(150)는 자기장을 형성하고 대상체로부터 발생되는 자기 공명 신호를 수신한다. 이를 위해, 스캐너(150)는 정자장(Static magnetic field)을 형성하는 정자장 코일부(151), 정자장에 경사(gradient)를 인가하여 경사자장(gradient field)을 형성하는 경사 코일부(152) 및 대상체(50)에 RF 펄스를 인가하여 원자핵을 여기시키고 원자핵으로부터 에코 신호를 수신하는 RF 코일부(153)를 포함한다.
또한, 스캐너(150)는 경사 코일부(152)에 경사 자장 발생을 위한 경사 전류를 인가하는 경사 인가부(155a) 및 RF 코일부(153)에 RF 신호를 송신하는RF 인가부(155b)를 더 포함할 수 있다. 일 예로, 경사 인가부(155a)는 경사 증폭기를 포함하는 회로로 구현될 수 있고, RF 인가부(155b)는 고주파 신호를 펄스형 신호로 변조하는 변조 회로와 전치 증폭기(pre-amplifier)를 포함할 수 있다.
제어부(120)는 시퀀스 제어부(121), 움직임 판단부(122) 및 테이블 제어부(123)를 포함할 수 있다.
시퀀스 제어부(121)는 경사 인가부(155a) 및 RF 인가부(155b)를 통해 경사 코일부(152) 및 RF 코일부(153)를 제어함으로써 보어(154, 도 3 참조)에 형성되는 경사자장 및 대상체(50)에 가해지는 RF 펄스를 제어할 수 있다.
따라서, 시퀀스 제어부(121)는 경사 인가부(155a)에 연결되어 경사 파형(gradient waveform)의 타이밍, 형태 등을 제어할 수 있고, RF 인가부(155b)에 연결되어 RF 펄스의 타이밍, 크기, 형태 등을 제어할 수 있다.
움직임 판단부(122)는 신호 처리부(170)로부터 제공받은 근전도 신호에 기초하여 대상체의 움직임을 판단할 수 있다. 예를 들어, 패턴 분류를 이용할 수도 있고, 모션 발생으로 볼 수 있는 임계값을 설정할 수도 있다. 모션 판단에 관한 구체적인 설명은 후술하도록 한다.
제어부(120)는 전술한 동작과 후술하는 동작을 수행하는 프로그램 및 프로그램을 수행하는데 필요한 데이터를 비일시적 또는 일시적으로 저장하는 메모리와, 메모리에 저장된 프로그램을 실행시키는 프로세서를 포함할 수 있다. 예를 들어, 제어부(120)는 MCU나 CPU 등의 칩으로 구현될 수 있다.
시퀀스 제어부(121)와 움직임 판단부(122)는 프로세서나 메모리를 공유할 수도 있고, 각각 별개의 프로세서와 메모리를 사용할 수도 있다. 또한, 제어부(120)는 데이터 처리부(160)나 신호 처리부(170)의 일부 또는 전부의 구성요소와 프로세서 또는 메모리를 공유하거나 단일의 컴퓨터를 공유하는 것도 가능하다.
RF 코일부(153)는 데이터 처리부(160)와 접속되어 있고, 데이터 처리부(160)는 RF 코일부(153)가 획득한 자기 공명 신호를 수신하는 데이터 수집부(161), k-공간 데이터를 저장하는 데이터 저장부(162) 및 k-공간 데이터를 이용하여 자기 공명 영상을 복원하는 영상 처리부(163)를 포함한다.
데이터 수집부(161)는 RF 코일부(153)가 획득한 자기 공명 신호를 수신하는 수신기, 자기 공명 신호를 증폭하는 전치 증폭기(pre-amplifier), 전치 증폭기로부터의 자기 공명 신호를 전송받아 위상을 검출하는 위상 검출기, 위상 검출에 의해 획득된 아날로그 신호를 디지털 신호로 변환하는 A/D 컨버터를 포함할 수 있다. 그리고 데이터 수집부(161)는 디지털 변환된 자기 공명 신호를 데이터 저장부(162)로 전송한다.
데이터 저장부(162)에는 자기 공명 데이터를 저장하는 수학적 공간이 형성되며, 이 수학적 공간은 k-공간(k-space)이라 한다. 일 예로, k-공간은 2차원 푸리에(Fourier) 공간일 수 있다.
데이터 저장부(162)의 k-공간에 자기 공명 데이터가 채워짐으로써 k-공간 데이터가 완성되면, 영상 처리부(163)는 다양한 영상 복원 기법을 적용하여 자기 공명 영상을 생성하는 바, 일 예로서 k-공간 데이터를 역 푸리에 변환하여 영상을 복원할 수 있다.
또한, 자기 공명 영상 장치(100)는 입력 인터페이스(111)와 출력 인터페이스(112)를 포함하는 사용자 인터페이스(110)를 구비할 수 있다. 입력 인터페이스(111)를 통해 사용자로부터 자기 공명 영상 장치(100)의 전반적인 동작에 관한 제어 명령을 입력받을 수 있다. 특히, 사용자로부터 자기 공명 영상의 촬영 기법이나 펄스 시퀀스에 관한 명령을 수신하면, 시퀀스 제어부(121)는 수신된 명령에 따라 펄스 시퀀스를 제어할 수 있다.
출력 인터페이스(112)는 자기 공명 영상 장치(100)의 제어에 관한 각종 정보와 영상 처리부(163)가 생성한 자기 공명 영상을 표시할 수 있다.
입력 인터페이스(111)는 키보드, 마우스, 트랙볼, 키패드, 터치 패드 등의 다양한 입력 장치 중 적어도 하나를 포함할 수 있고, 출력 인터페이스(112)는 LCD(Liquid Crystal Display), LED(Light Emission Display), OLED(Organic Light Emission Display), PDP(Plasma Display Panel), CRT(Cathode Ray Tube) 등의 다양한 디스플레이 장치 중 적어도 하나를 포함할 수 있다.
또한, 입력 인터페이스(111)와 출력 인터페이스(112)가 터치 패널이 디스플레이의 전면에 배치되어 터치 스크린 형태로 구현되는 것도 가능하다.
도 3a 및 도 3b는 자기공명영상장치의 외관을 개략적으로 나타낸 도면이고, 도 4는 대상체가 놓여 있는 공간을 X, Y, Z 축으로 구분한 도면이며, 도 5는 스캐너의 구조와 경사 코일의 구조를 나타낸 도면이다.
이하 앞서 설명한 도 2를 함께 참조하여 자기 공명 영상 장치(100)의 구체적인 동작에 대해 설명하도록 한다.
도 3a 및 도 3b를 참조하면, 내부 공간이 비어 있는 원통형의 형상을 갖는 갠트리(101)에 정자장 코일부(151), 경사 코일부(152) 및 RF 코일부(153)가 내장될 수 있다.
테이블(103)은 그 위에 누워 있는 대상체(50)를 보어(154)로 이송시키는바, 사용자가 입력 인터페이스(111)를 조작하여 테이블(103)의 위치에 관한 명령을 입력하면, 테이블 제어부(123)가 테이블(103)을 제어하여 사용자가 원하는 위치로 이동시킬 수 있다.
한편, 대상체는 자기 공명 영상 장치(100)에 의해 자기 공명 영상이 획득될 수 있는 것이면 되고, 그 종류에 대해서는 제한을 두지 않는다. 다만, 후술하는 실시예에서는 대상체를 환자라 지칭하기로 한다.
예를 들어, 테이블 제어부(123)는 테이블(103)을 이동시켜 환자의 촬영 부위를 보어(154)에 형성된 자기장의 isocenter에 위치시킬 수 있다. 보어(154)에 형성된 자기장의 isocenter에서 멀어질 수록 자기장의 균질도가 감소하기 때문에, 영상의 왜곡을 최소화시키기 위해서는 isocenter와 최대한 가까운 위치에서 자기 공명 데이터를 획득해야 한다. isocenter는 보어에 형성된 자기장의 중심을 나타내는 것으로서, x축 경사 자장(Gz), y축 경사 자장(Gy) 및 z축 경사 자장(Gz)이 모두 0인 지점을 나타낸다.
사용자 인터페이스(110)는 도 3a 및 도 3b에 도시된 바와 같이, 갠트리(101)와 별도로 마련된 워크스테이션 또는 호스트 장치에 포함될 수 있다. 또한, 제어부(120), 데이터 처리부(160), 신호 처리부(170)의 일부 또는 전부의 구성요소 역시 워크스테이션 또는 호스트 장치에 포함될 수 있다.
도 3a에 도시된 바와 같이 RF 코일부(153)의 송신 코일과 수신 코일이 모두 갠트리(101)에 내장될 수도 있고, 도 3b에 도시된 바와 같이 송신 코일(153a)은 갠트리(101)에 내장되고 수신 코일(153b)은 환자(50)의 촬영 부위에 직접 부착될 수 있다. 예를 들어, 촬영 부위가 환자(50)의 머리인 경우, 수신 코일(153b)은 투구 형상의 형태로 구현될 수 있다.
수신 코일(153b)의 예로, 표면 코일(surface coil), 체적 코일(volume coil), 배열형 코일(array coil) 등을 사용할 수 있다
정자장 코일부(151)는 보어에 정자장을 발생시키기 위한 코일을 포함하며, 이를 메인 자석(main magnet)이라고도 한다. 메인 자석은 초전도 자석으로 구현되는 것도 가능하다. 이 경우, 정자장 코일부(151)는 초전도 코일을 포함한다.
정자장 코일부(151)는 보어(154)의 둘레를 코일이 감고 있는 형태로 구현될 수 있고, 정자장 코일부(151)에 의해 일정한 크기를 갖는 정자장이 형성된다. 정자장의 방향은 일반적으로 갠트리(101)의 종축과 평행하다.
보어(154)에 정자장이 형성되면 환자(50)를 구성하는 원자 특히, 수소 원자의 원자핵은 정자장의 방향으로 정렬되며, 정자장의 방향을 중심으로 세차운동(precession)을 한다. 원자핵의 세차속도는 세차 주파수로 나타낼 수 있으며 이를 라모르(Larmor) 주파수라 부르고 아래의 [수학식 1]로 표현할 수 있다.
[수학식 1]
ω=γB0
여기서, ω는 라모르 주파수이고 γ는 비례상수이며 B0는 외부 자기장의 세기이다. 비례상수는 원자핵의 종류마다 달라지며 외부 자기장의 세기의 단위는 테슬라(T) 또는 가우스(G)이고 세차주파수의 단위는 Hz이다.
예를 들어, 수소 양성자는 1T의 외부 자기장 속에서 42.58MHZ의 세차주파수를 가지며, 인간의 몸을 구성하는 원자 중 가장 큰 비율을 차지하는 것이 수소이므로 자기 공명 영상에서는 주로 수소 양성자의 세차운동을 이용하여 자기 공명 신호를 얻는다.
도 4에 도시된 바와 같이, 환자(50)의 종축이 갠트리(101)의 종축과 평행하게 놓여진다는 전제 하에, 환자(50)의 발부터 머리까지의 종축과 평행하는 축, 즉 정자장의 방향과 평행하는 축을 Z축으로, 환자(50)의 좌우방향과 평행하는 축을 X축으로, 공간에서의 상하 방향과 평행하는 축을 Y축으로 결정할 수 있다.
환자(50)의 종축이 정자장의 방향과 평행하게 놓여지면, 환자(50)의 횡단면에 대한 단면 영상을 얻을 수 있으며, 단면 영상을 얻기 위해 일정 두께를 갖는 슬라이스가 선택될 수 있다.
자기 공명 신호에 대한 3차원의 공간적인 정보를 얻기 위해서는 X, Y, Z 축 모두에 대한 경사 자장이 요구된다. 따라서, 경사 코일부(152)는 X, Y, Z 축에 각각 대응되는 세 쌍의 경사 코일을 포함할 수 있다.
도 5에 도시된 것처럼 Z축 경사 코일(152z)은 일반적으로 한 쌍의 링 타입의 코일로 구성되고, Y축 경사 코일(152y)은 환자(50)의 위아래에 위치한다. X축 경사 코일(152x)은 환자(50)의 좌우측에 위치한다.
후술하는 바와 같이 Z축 경사 코일(152z)은 슬라이스를 선택하는데 이용되고, Y축 경사 코일(152y)은 위상 부호화(phase encoding)에 이용되며, X축 경사 코일(152x)은 주파수 부호화(frequency encoding)에 이용된다.
도 6은 경사 코일의 동작과 관련된 펄스 시퀀스를 도시한 도면이다.
반대극성을 가진 직류전류가 두 개의 Z축 경사 코일(152z) 각각에서 반대 방향으로 흐르게 되면 Z축 방향으로 자장의 변화가 발생하여 경사 자장이 형성된다.
Z축 경사 코일(152z)에 일정 시간 동안 전류를 흘려 주어 경사 자장이 형성되면, 공명 주파수는 경사 자장의 크기에 따라 크거나 작게 변화된다. 그리고, 특정 위치에 해당하는 고주파(RF) 펄스를 RF 코일부(153)가 발생시키면 그 특정 위치에 대응되는 단면의 양성자 만이 공명을 일으킨다. 따라서, Z축 경사 코일(152z)은 슬라이스 선택(slice selection)에 사용된다. 그리고, Z축 방향으로 형성되는 경사자장의 기울기가 클수록 얇은 두께의 슬라이스를 선택할 수 있다.
Z축 경사 코일(152z)에 의해 형성된 경사 자장을 통해 슬라이스가 선택되면, 슬라이스를 구성하는 스핀들은 모두 동일한 주파수 및 동일한 위상을 가지므로 각 스핀을 구별할 수 없다.
이 때, Y축 경사 코일(152y)에 의해 Y축 방향으로 경사 자장이 형성되면, 경사 자장은 슬라이스를 구성하는 행(row)들이 서로 다른 위상을 갖도록 위상 시프트를 일으킨다.
즉, Y축 경사 자장이 형성되면 큰 경사 자장이 걸린 행의 스핀들은 높은 주파수로 위상이 변하고 작은 경사 자장이 걸린 행의 스핀들은 보다 낮은 주파수로 위상이 변한다. Y축 경사 자장이 사라지면 선택된 슬라이스의 각 행들은 위상 시프트가 일어나 서로 다른 위상을 갖게 되고, 이로 인해 행들을 구별할 수 있다. 이러한 원리에 따라 Y축 경사 코일(152y)에 의해 생긴 경사자장은 위상 부호화(phase encoding)에 사용될 수 있다.
Z축 경사 코일(152z)에 의해 형성된 경사 자장을 통해 슬라이스가 선택되고, Y축 경사 코일(152y)에 의해 형성된 경사 자장을 통해 선택된 슬라이스를 구성하는 행들을 서로 다른 위상으로 구별한다. 그러나 하나의 행을 구성하는 각 스핀들은 모두 동일한 주파수 및 동일한 위상을 가지므로 구별할 수 없다.
이때 X축 경사 코일(152x)에 의해 X축 방향으로 경사 자장이 형성되면, X축 경사 자장은 각 행을 구성하는 스핀들이 서로 다른 주파수를 갖도록 하여 각각의 스핀을 구별하도록 해준다. 이와 같이 X축 경사 코일(152x)에 의해 생긴 경사 자장은 주파수 부호화(frequency encoding)에 사용된다.
전술한 것처럼, Z, Y, X축 경사 코일에 의해 형성되는 경사 자장은 슬라이스 선택, 위상 부호화, 주파수 부호화를 통해 각 스핀들의 공간 위치를 부호화(spatial encoding)한다.
경사 코일부(152)는 경사 인가부(155a)와 접속되어 있고, 경사 인가부(155a)는 시퀀스 제어부(121)로부터 전송받은 제어신호에 따라 경사 코일부(152)에 경사 파형 즉, 전류 펄스를 인가하여 경사자장을 발생시킨다. 따라서, 경사 인가부(155a)는 경사 전원이라고도 하며, 경사 코일부(152)를 구성하는 세 개의 경사 코일(152x,152y,152z)에 대응하여 세 개의 구동회로를 구비할 수 있다.
앞서 설명한 바와 같이 외부 자기장에 의해 정렬된 원자핵들은 Larmor 주파수로 세차운동을 하며 여러 개의 원자핵의 자화(magnetization) 벡터합을 하나의 평균자화(net magnetization) M으로 나타낼 수 있다.
평균자화의 Z축 성분은 측정이 불가능하고, MXY만이 검출될 수 있다. 따라서, 자기 공명 신호를 얻기 위해서는 원자핵을 여기(excitation)시켜 평균자화가 XY 평면 위에 존재하게 해야 한다. 원자핵의 여기를 위해 원자핵의 Larmor 주파수로 tune된 RF 펄스를 인가해야 한다.
원자핵으로부터 자기 공명 신호를 얻기 위해 사용되는 펄스 시퀀스의 예로는 경사 에코 펄스 시퀀스(gradient echo pulse sequence), 스핀 에코 펄스 시퀀스(spin echo pulst sequence) 등이 있다. 이하 스핀 에코 펄스 시퀀스를 예로 들어 구체적으로 설명한다.
도 7은 스핀 에코 펄스 시퀀스를 사용하는 경우의 펄스 시퀀스 다이어그램이다.
도 7을 참조하면, RF 코일부(153)에서 RF 펄스를 인가 할 때, 먼저 원자핵의 여기(excitation)를 위한 RF 펄스(이하, 여기 RF라 함)를 인가한다. 여기 RF펄스가 인가되면, 자장의 불균일성이나 스핀 간의 상호 작용에 의해 Dephasing이 나타나고, 이 때 급격히 감소하는 FID(Free Induction Decay) 신호가 발생된다.
따라서, 안정된 상태의 신호를 얻기 위해 Dephasing된 스핀을 다시 모아주는 리포커싱(refocusing) RF펄스를 인가하면, 원자핵들에 강한 횡자화가 나타나며 FID 신호가 다시 모여 안정된 에코 신호 즉, 자기 공명 신호가 나타난다. 이를 스핀 에코(Spin Echo) 펄스 시퀀스라 하고, 여기 RF 인가 후 자기 공명 신호가 발생할 때까지 걸리는 시간을 TE(Echo Time)라 한다.
여기 RF 펄스 인가 후, 리포커싱 RF 펄스 인가 사이의 시간을 △t라 하면, 리포커싱 RF 펄스 인가 후 △t가 경과하면 자기 공명 신호가 발생된다. 따라서, TE = 2△t의 관계가 성립된다.
양성자가 얼마나 플립(flip)되었는지 여부는 플립되기 전에 위치하던 축으로부터 이동한 각으로 나타낼 수 있으며, 플립 정도에 따라 90ㅀRF, 180ㅀRF 등으로 나타낸다. 스핀 에코 펄스 시퀀스에서는 주로 여기 RF를 90ㅀRF로, 리포커싱 RF를 180ㅀRF로 한다.
도 7을 참조하면, 90ㅀRF 펄스와 동시에 Z축 경사 자장을 인가하면, 특정 단면에 해당하는 위치에서만 공명이 일어난다. 신호에 위치 정보를 주기 위해 y축 경사 자장을 인가했다가 차단하면 양성자들 사이에 위상차가 발생한다.
스핀 에코 신호를 얻기 위해 180ㅀRF 펄스를 인가하면 자장의 불균일성이나 화학적 시프트에 의해 dephase되었던 스핀들이 재자화된다.
180ㅀRF 펄스를 인가한 후 x축 경사 자장(Gx)을 인가하면, 180ㅀRF 펄스에 의한 Rephase가 합해져 최대의 에코신호를 획득할 수 있다.
발생된 에코 신호에는 x축, y축 상에서의 위치 정보가 포함되어 있다. 따라서, y축 경사 자장과 x축 경사 자장에 의해 획득되는 신호들이 kx축과 ky축으로 이루어진 2차원 공간인 k-공간을 채워주게 된다.
한편, 하나의 단면 영상을 얻기 위해 y축 경사 자장의 크기를 바꿔가면서 여러 번 에코 신호를 얻을 수 있는바, 에코 신호를 얻기 위해 90ㅀRF펄스를 인가한 시간과 그 다음 에코 신호를 얻기 위해 90ㅀRF펄스를 인가한 시간 사이의 간격을 반복 시간(TR:Repetition Time)이라 한다.
도 8은 z축 경사 자장의 크기를 달리하여 여러 번 획득되는 에코 신호와 k-공간의 관계를 나타낸 도면이다.
앞서 언급한 바와 같이, 데이터 저장부(161)에 k-공간이 형성되고, k-공간에 데이터가 채워진 k-공간 데이터가 데이터 저장부(161)에 저장된다. k-공간은 푸리에 변환(Fourier transformation)을 수행하기 위한 일종의 수학적 공간으로서, 도 8에 도시된 바와 같이 kx축과 ky축으로 이루어질 수 있으며, kx축은 주파수 방향이고 ky축은 위상 방향이다.
예를 들어, 도 8에 도시된 바와 같이 20개의 서로 다른 y축 경사 자장에 대해 에코 신호를 얻는 경우에는, ky축이 20개의 횡선 즉, 20개의 ky 라인들로 구성될 수 있고 각각의 y축 경사 자장에 대해 획득된 에코 신호가 하나의 ky 라인을 채운다. 따라서, 20개의 서로 다른 y축 경사 자장에 대해 에코 신호가 모두 얻어지면, 20개의 ky 라인이 모두 채워지면서 하나의 k-공간 데이터가 완성된다. 하나의 k-공간 데이터를 복원하면 하나의 자기 공명 영상을 얻을 수 있다.
도 9 및 도 10은 환자의 근전도 신호를 측정하는 신호 측정부의 구성을 나타낸 도면이고, 도 11은 신호 처리부의 구성을 나타낸 일 예시에 관한 도면이다.
도 9 및 도 10을 함께 참조하면, 신호 측정부(170)는 환자(50)에 부착되는 측정 센서(171)와 측정 센서(171)가 측정한 신호를 처리하여 움직임 판단에 이용할 수 있는 형태로 변환하는 신호 처리부(172)를 포함할 수 있다.
측정 센서(171)는 촬영 부위와 관련된 부위에 장착될 수 있다. 촬영 부위와 관련된 부위는 해당 부위를 움직였을 때 자기 공명 영상에 모션 아티팩트가 나타날 수 있는 부위를 의미한다.
예를 들어, 환자(50)의 등이나 허리를 촬영하는 경우에는 환자(50)의 척추 기립근(Erector Spinae Muscle), 요방형근(Quadratus Lumborum), 내복사근(Internal Oblique)에 측정 센서(171)를 부착할 수 있고, 목을 촬영하는 경우에는 환자(50)의 상부 승모근(Upper Trapezoid Muscle)에 측정 센서(171)를 부착할 수 있다.
또한, 환자(50)의 심장을 촬영하는 경우에는 가슴 근육에 측정 센서(171)를 부착할 수 있다.
또한, 환자(50)의 머리를 촬영하는 경우에는 도 10에 도시된 바와 같이, 환자(50)의 목 근육 중 일부에 측정 센서(171)를 부착할 수 있다. 측정 센서(151)는 필요에 따라 복수 개 마련될 수 있다.
따라서, 사용자는 촬영 부위의 움직임을 감지할 수 있는 적절한 위치에 적절한 개수의 측정 센서(171)를 부착하여 근전도 신호를 측정할 수 있다.
도 11의 예시를 참조하면, 신호 처리부(172)는 측정 센서(171)가 측정한 근전도 신호를 수신하여 증폭하는 증폭기(172a), 증폭된 신호를 필터링하는 필터링부(172b) 및 필터링된 신호를 디지털로 변환하는 아날로그-디지털 변환기(172c)를 포함할 수 있다.
증폭기(172a)는 전치 증폭기(pre-amplifier), 차동 증폭기(differenctial amplifier), 계측 증폭기(Instrument amplifier) 등의 다양한 증폭기 중에서 선택될 수 있다.
필터링부(172b)는 노치 필터(Notch Filter), 하이패스 필터(Highpass Filter), 로우패스 필터(Lowpass Filter) 등의 다양한 필터 중에서 선택될 수 있다.
근전도 신호의 측정은 스캔(자기 공명 촬영)이 시작되기 전부터 이루어질 수 있다. 스캔이 이루어지기 전에 측정된 근전도 신호는 백그라운드 신호가 될 수 있고, 스캔이 이루어진 후에 측정된 근전도 신호가 움직임 판단에 사용되는 메인 신호가 된다. 필터링부(172b)는 백그라운드 신호를 이용하여 메인 신호를 1차 필터링함으로써 바이어스를 조정한다.
또한, 필터링부(172b)는 1차 필터링 이후에 주파수 도메인에서의 2차 필터링을 수행할 수 있다. 이를 위해, FFT(Fast Fourier Transform)를 이용하여 주파수 변환을 수행할 수 있다.
필터링된 근전도 신호는 아날로그-디지털 변환기(172c)를 통해 디지털로 변환되어 움직임 판단부(122)에 입력될 수 있다.
전술한 신호 처리부(172)는 적어도 하나의 프로세서 및 메모리를 포함할 수 있고, MCU나 CPU 등의 칩으로 구현될 수 있다. 또한, 신호 처리부(172)는 제어부(120)와 별도의 모듈 또는 별도의 칩으로 구현될 수도 있고, 제어부(120)와 모듈 또는 칩을 공유할 수도 있다.
움직임 판단부(122)는 입력된 근전도 신호를 이용하여 움직임 특성을 판단하고, 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다. 이 때, 입력된 근전도 신호를 그대로 이용하는 것도 가능하고, RMS(Root Mean Square), MDF(Median Frequency) 또는 MNF(Mean Frequency) 등의 값으로 변환하여 이용하는 것도 가능하다.
움직임 특성을 판단하기 위한 일 예로, 패턴 분류(Pattern Classification)를 이용할 수 있다. 움직임 판단부(122)는 패턴 인식에 사용되는 다양한 모델들 중 하나를 적용하여 패턴 학습을 수행함으로써 패턴 분류기를 생성하고, 근전도 신호가 패턴 분류기에 입력되면 환자의 움직임에 대응되는 패턴, 즉 움직임 패턴이 출력될 수 있다.
패턴 분류기는 자기 공명 촬영을 시작하기 이전에 미리 생성될 수 있다. 예를 들어, 다수의 환자들로부터 근전도 신호를 수집하고, 발생된 근전도 신호와 실제 움직임의 관계에 기초하여 모션 데이터베이스를 구축할 수 있다. 움직임 판단부(122)는 모션 데이터베이스에 저장된 데이터들을 이용하여 패턴 학습을 수행하고, 패턴 분류기를 생성할 수 있다.
또는, 해당 환자로부터 수집된 근전도 신호를 이용하여 패턴 학습을 수행하고 패턴 분류기를 생성하는 것도 가능하다. 이 경우, 자기 공명 촬영 전부터 수집된 근전도 신호를 이용하여 패턴 학습을 수행하고, 패턴 분류기를 생성할 수 있다 또한, 자기 공명 촬영이 시작된 이후에도 근전도 신호는 지속적으로 측정되어 패턴 분류기를 업데이트하는데 사용될 수 있다.
패턴 학습과 분류에 사용되는 방법이나 모델에는 제한을 두지 않는다. 기계 학습을 기반으로 한 다양한 패턴 학습과 패턴 분류 모델 중 어느 것을 적용하여도 무방하다.
예를 들어, 공분산 기법(Covariance method)과 학습 벡터 양자화(Learning Vector Quantization)를 적용할 수 있다. 공분산 기법은 AR 파라미터를 추정하기 위한 기법이고, 학습 벡터 양자화는 패턴 인식에서 지도 학습 군집화의 방법 중 하나로서, 입력패턴을 복수의 출력층으로 군집화하는 네트워크이다. 입력패턴과 참조패턴에 대해 유사성을 결정하고, 참조패턴을 새롭게 갱신하는 것으로 특징으로 한다.
근전도 신호가 패턴 분류기에 입력되면, 입력된 근전도 신호에 대응되는 움직임 패턴이 출력된다. 각각의 움직임 패턴은 움직임의 크기 또는 움직임의 종류와 같은 움직임 특성을 나타낼 수 있다. 여기서, 움직임의 종류는 환자의 자세 변화를 나타낼 수 있다. 예를 들어, 환자의 머리의 움직임을 감지하기 위해 측정 센서(171)를 환자의 목의 근육에 부착한 경우에는, 환자가 머리를 좌우로 돌리는지, 앞으로 숙이는지 또는 뒤로 젖히는지 등에 관한 자세 변화를 나타낼 수 있다. 또한, 움직임의 크기는 환자의 자세가 변화된 정도를 나타낼 수 있다.
움직임 판단부(122)는 환자의 움직임 패턴에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다. 환자의 움직임이 발생했더라도 그 크기나 종류가 모션 아티팩트의 발생에 영향을 미치지 않을 수 있다.
예를 들어, 자기 공명 영상의 촬영 중에는 기본적으로 환자가 호흡하지 않는 것을 원칙으로 하나, 환자가 이를 이행하지 않는 경우도 있고, 촬영 시퀀스가 장시간 소요되는 경우에는 촬영 내내 숨을 참는 것이 실질적으로 불가능하다. 환자가 호흡하는 동안 획득된 데이터가 하나의 k-공간을 구성하기 때문에, 이를 복원한 자기 공명 영상에는 모션 아티팩트가 발생할 수 있는바, 이를 감소시키기 위한 방법으로 호흡이 주기적으로 반복된다는 특징을 이용하여 동일한 호흡 상태에서의 데이터를 이용하여 영상을 복원하는 전향적 게이팅(prospective gating) 방법과 후향적 게이팅(retrospective gating) 방법이 있다.
이러한 게이팅 방법을 적용하는 경우에는, 환자의 호흡으로 인한 움직임은 모션 아티팩트를 발생시키지 않는 것으로 보고, 호흡으로 인한 움직임 이외의 움직임을 모션 아티팩트를 발생시키는 움직임으로 판단할 수 있다.
따라서, 촬영 부위가 심장인 경우 등 가슴 주변 근육의 움직임에 영향을 받는 스캔을 수행하는 경우에, 움직임 판단부(122)는 스캔이 시작되기 전 환자의 들숨과 날숨이 진행되는 동안에 패턴 학습을 수행하여 호흡으로 인한 패턴을 형성할 수 있다.
스캔이 시작되면 신호 측정부(171)가 근전도 신호를 획득하여 움직임 판단부(122)에 전달하고, 움직임 판단부(122)는 근전도 신호가 나타내는 움직임 패턴이 호흡으로 인한 패턴이 아닌 경우에는 모션 아티팩트가 발생할 것으로 예측할 수 있다.
따라서, 움직임 판단부(122)는 환자의 움직임 패턴과 모션 아티팩트의 발생 사이의 관계에 관한 정보에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있고, 그 결과를 시퀀스 제어부(121) 또는 데이터 처리부(160)에 전달할 수 있다. 일 예로, 환자의 움직임 패턴과 모션 아티팩트의 발생 사이의 관계에 관한 정보는, 움직임 패턴 별로 모션 아티팩트의 발생 여부 또는 발생 가능성이 매칭된 정보일 수 있다.
일 예로, 움직임 판단부(122)는 모션 아티팩트의 발생이 예측되면, 모션 아티팩트 예측 신호를 시퀀스 제어부(121)와 데이터 처리부(160)에 모두 전달할 수 있다. 모션 아티팩트 예측 신호를 수신한 시퀀스 제어부(121)는 환자의 움직임 발생 시점에 대응되는 자기 공명 신호를 재획득하도록 스캐너(150)를 제어할 수 있다. 또한, 데이터 저장부(162)는 저장된 데이터 중 환자의 움직임 발생 시점에 획득된 자기 공명 신호를 삭제하고, 영상 처리부(163)는 재획득된 자기 공명 신호를 이용하여 영상을 재구성할 수 있다.
다른 예로, 움직임 판단부(122)는 모션 아티팩트의 발생이 예측되면, 환자의 움직임 패턴을 데이터 처리부(160)에 전달할 수 있다. 환자의 움직임 패턴은 메모리에 저장되고, 영상 처리부(163)는 저장된 움직임 패턴에 기초하여 모션 아티팩트를 보정하기 위한 후처리를 수행할 수 있다.
구체적으로, 움직임의 크기나 종류에 따라 그로 인해 발생한 모션 아티팩트를 보정하기 위한 후처리 알고리즘, 후처리 파라미터 등이 달라질 수 있는바, 영상 처리부(163)는 환자의 움직임 패턴을 참조하여 모션 아티팩트의 보정을 위한 후처리를 수행할 수 있다.
또한, 움직임 패턴에 기초하여 자기 공명 신호의 재획득과 후처리를 통한 보정을 선택적으로 수행할 수 있다. 예를 들어, 움직임의 크기가 미리 설정된 기준치 이상으로 큰 경우에는 자기 공명 신호를 재획득하고, 기준치 미만인 경우에는 후처리를 통한 보정을 수행할 수 있다. 또는, 움직임 패턴 별로 자기 공명 신호를 재획득하는 것이 효율적일 수도 있고, 후처리를 통한 보정을 수행하는 것이 효율적일 수도 있다. 따라서, 움직임 패턴 별로 자기 공명 신호의 재획득과 후처리를 통한 보정 중 하나에 매핑되는 것도 가능하다.
움직임을 판단하기 위한 다른 예로, 임계값을 미리 설정하고 근전도 신호를 임계값과 비교할 수도 있다. 근전도 신호가 임계값 이상인 경우에는, 모션 아티팩트가 발생할 것으로 예측하고 적절한 조치를 취할 수 있다. 모션 아티팩트의 발생이 예측된 이후의 동작은 전술한 예시에서와 동일하다.
또한, 패턴 분류기의 신뢰성에 따라 임계값과 비교하는 것과, 패턴 분류를 수행하는 것 중 하나를 선택하는 것도 가능하다. 예를 들어, 근전도 신호의 측정 시간이 기준시간 미만인 경우에는, 패턴 학습에 사용된 데이터의 수가 부족하여 패턴 분류기의 신뢰성이 높지 않으므로 근전도 신호를 미리 설정된 임계값과 비교하는 방식을 선택할 수 있다. 근전도 신호의 측정 시간이 기준시간 이상인 경우에는, 패턴 분류기를 신뢰할 수 있는 것으로 보고 패턴 분류를 수행하는 방식을 선택할 수 있다.
이하, 일 측면에 따른 자기 공명 영상 장치의 실시예를 설명한다. 일 실시예에 따른 자기 공명 영상 장치의 제어 방법에는, 전술한 실시예에 따른 자기 공명 영상 장치가 사용될 수 있다. 따라서, 전술한 도 1 내지 도 11에 관한 설명은 별다른 언급이 없더라도 후술하는 자기 공명 영상 장치의 제어방법에도 적용될 수 있다.
도 12및 도 13은 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 관한 순서도이다.
도 12를 참조하면, 환자의 촬영 부위와 관련된 부위에 적어도 하나의 측정 센서(171)를 부착하여 근전도 신호를 획득한다(310). 촬영 부위와 관련된 부위는 해당 부위를 움직였을 때 자기 공명 영상에 모션 아티팩트가 나타날 수 있는 부위를 의미한다. 예를 들어, 촬영 부위를 움직일 때 사용되는 근육이 촬영 부위와 관련된 부위가 될 수 있는바, 촬영 부위가 머리인 경우에는 목 근육이 촬영 부위와 관련된 부위가 될 수 있고, 촬영 부위가 심장인 경우에는 가슴 근육이 촬영 부위와 관련된 부위가 될 수 있다.
자기 공명 촬영을 수행한다(311). 즉, 촬영 부위에 대한 스캔을 시작할 수 있는바, 여기서 스캔은 메인 스캔 전에 이루어지는 프리 스캔(pre-scan)과 메인 스캔을 모두 포함할 수 있다. 메인 스캔은 시퀀스 제어부(121)가 스캐너(150)를 제어하여 촬영 부위의 자기 공명 영상을 얻기 위한 펄스 시퀀스를 인가함으로써 이루어질 수 있다. 한편, 근전도 신호의 획득은 자기 공명 촬영이 수행되는 동안에도 실시간으로 이루어질 수 있다.
근전도 신호의 획득과 자기 공명 촬영이 수행되는 동안 움직임 판단부(122)는 실시간으로, 근전도 신호에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다(312). 예를 들어, 근전도 신호에 기초하여 환자의 움직임 패턴을 획득할 수 있고, 환자의 움직임 패턴은 움직임의 크기 또는 움직임의 종류를 나타낼 수 있다. 그리고, 환자의 움직임 패턴에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다.
모션 아티팩트의 발생이 예측되면(313의 예), 환자의 움직임 패턴에 기초하여 자기 공명 영상을 보정한다(314). 구체적으로, 움직임 판단부(122)는 모션 아티팩트의 발생이 예측되면, 환자의 움직임 패턴을 데이터 처리부(160)에 전달할 수 있다. 환자의 움직임 패턴은 메모리에 저장되고, 영상 처리부(163)는 저장된 움직임 패턴에 기초하여 모션 아티팩트를 보정하기 위한 후처리를 수행할 수 있다. 구체적으로, 움직임의 크기나 종류에 따라 그로 인해 발생한 모션 아티팩트를 보정하기 위한 후처리 알고리즘, 후처리 파라미터 등이 달라질 수 있는바, 영상 처리부(163)는 환자의 움직임 패턴을 참조하여 모션 아티팩트의 보정을 위한 후처리를 수행할 수 있다.
한편, 모션 아티팩트의 발생이 예측되는 경우에 그에 대한 대응조치가 영상 보정에 한정되는 것은 아니다. 이하, 도 13의 예시를 참조하여 설명한다.
도 13을 참조하면, 근전도 신호의 획득(320), 자기 공명 촬영의 수행(321), 모션 아티팩트 발생 여부의 판단(322)까지의 설명은 전술한 도 12의 예시에서와 동일하므로, 생략한다.
당해 예시에서는, 모션 아티팩트의 발생이 예측되면(323의 예), 모션 아티팩트 발생 시점에 대응되는 자기 공명 신호를 재획득할 수 있다(324). 여기서, 모션 아티팩트 발생 시점에 대응되는 자기 공명 신호는 모션 아티팩트의 원인이 된 움직임이 발생된 시점에 획득된 자기 공명 신호일 수 있다. 데이터 저장부(162)는 저장된 데이터 중 환자의 움직임 발생 시점에 획득된 자기 공명 신호를 삭제하고, 영상 처리부(163)는 재획득된 자기 공명 신호를 이용하여 영상을 재구성할 수 있다.
도 14는 일 실시예에 따른 자기 공명 영상 장치에 있어서, 패턴 분류를 이용하여 모션 아티팩트의 발생을 예측하는 예시에 관한 순서도이다.
도 14를 참조하면, 환자의 촬영 부위와 관련된 부위에 적어도 하나의 측정 센서(171)를 부착하여 근전도 신호를 획득한다(330).
자기 공명 촬영을 수행한다(331). 근전도 신호의 획득은 자기 공명 촬영이 수행되는 동안에도 실시간으로 이루어질 수 있다.
근전도 신호의 획득과 자기 공명 촬영이 수행되는 동안 움직임 판단부(122)는 실시간으로, 근전도 신호에 기초하여 환자의 움직임 패턴을 분류할 수 있다(332). 움직임 판단부(122)는 패턴 인식에 사용되는 다양한 모델들 중 하나를 적용하여 패턴 학습을 수행함으로써 패턴 분류기를 생성하고, 근전도 신호가 패턴 분류기에 입력되면 환자의 모션에 대응되는 패턴, 즉 움직임 패턴이 출력될 수 있다.
패턴 분류기는 자기 공명 촬영을 시작하기 이전에 미리 생성될 수도 있고, 해당 환자로부터 수집된 근전도 신호를 이용하여 패턴 학습을 수행하고 패턴 분류기를 생성하는 것도 가능하다.
환자의 움직임 패턴에 기초하여 모션 아티팩트의 발생 여부를 예측한다(333). 움직임 판단부(122)는 환자의 움직임 패턴과 모션 아티팩트의 발생 사이의 관계에 관한 정보에 기초하여 모션 아티팩트의 발생 여부를 예측할 수 있다. 일 예로, 환자의 움직임 패턴과 모션 아티팩트의 발생 사이의 관계에 관한 정보는, 움직임 패턴 별로 모션 아티팩트의 발생 여부 또는 발생 가능성이 매칭된 정보일 수 있다.
모션 아티팩트의 발생이 예측되면(334의 예), 자기 공명 신호를 재획득하거나 자기 공명 영상을 보정하여 모션 아티팩트를 제거할 수 있다(335).
도 15는 일 실시예에 따른 자기 공명 영상 장치의 제어방법에 있어서, 환자로부터 획득한 근전도 신호를 이용하여 패턴을 학습하는 예시에 관한 순서도이다.
도 15를 참조하면, 환자의 촬영 부위와 관련된 부위에 적어도 하나의 측정 센서(171)를 부착하여 근전도 신호를 획득한다(340). 전술한 바와 같이, 근전도 신호의 획득은 자기 공명 스캔이 시작되기 전부터 이루어질 수 있고, 자기 공명 스캔이 시작된 이후에도 근전도 신호는 계속 획득된다.
획득된 근전도 신호를 이용하여 패턴 학습을 수행하여(341), 패턴 분류기를 생성한다. 이 경우, 해당 환자의 근전도 시호를 이용하여 패턴 학습을 수행하기 때문에, 패턴 분류 결과에 대한 신뢰성을 향상시킬 수 있다.
자기 공명 촬영을 수행한다(342). 근전도 신호의 획득과 자기 공명 촬영이 수행되는 동안 움직임 판단부(122)는 실시간으로, 근전도 신호에 기초하여 환자의 움직임 패턴을 분류할 수 있다(343). 또한, 전술한 패턴 학습도 실시간 또는 주기적으로 수행되어 업데이트될 수 있다.
환자의 움직임 패턴에 기초하여 모션 아티팩트의 발생 여부를 예측하고(344), 모션 아티팩트의 발생이 예측되면(345의 예), 자기 공명 신호를 재획득하거나 자기 공명 영상을 보정하여 모션 아티팩트를 제거할 수 있다(346).
해당 환자에 대한 패턴 분류기는 메모리에 저장되어 데이터베이스로 구축될 수 있다. 따라서, 해당 환자가 이후에 재촬영을 수행하는 경우, 데이터베이스화되어 있는 패턴 분류기를 호출하여 다시 업데이트하고 재사용할 수 있다.
또한, 환자의 움직임 패턴에 대한 정보도 메모리에 저장되어 환자의 움직임 습관에 대한 데이터베이스를 구축하고, 이를 영상의 후처리, 펄스 시퀀스의 선택 또는 패턴 분류기의 업데이트에 반영할 수 있다.
한편, 움직임을 판단하기 위한 다른 예로, 임계값을 미리 설정하고 근전도 신호를 임계값과 비교할 수도 있다. 근전도 신호가 임계값 이상인 경우에는, 모션 아티팩트가 발생할 것으로 예측하고 적절한 조치를 취할 수 있다. 모션 아티팩트의 발생이 예측된 이후의 동작은 패턴을 분류하는 예시에서와 동일하다.
또한, 패턴 분류기의 신뢰성에 따라 임계값과 비교하는 것과, 패턴 분류를 수행하는 것 중 하나를 선택하는 것도 가능하다. 예를 들어, 근전도 신호의 측정 시간이 기준시간 미만인 경우에는, 패턴 학습에 사용된 데이터의 수가 부족하여 패턴 분류기의 신뢰성이 높지 않으므로 근전도 신호를 미리 설정된 임계값과 비교하는 방식을 선택할 수 있다. 근전도 신호의 측정 시간이 기준시간 이상인 경우에는, 패턴 분류기를 신뢰할 수 있는 것으로 보고 패턴 분류를 수행하는 방식을 선택할 수 있다.
전술한 실시예에서는 자기 공명 영상 장치를 예를 들어 설명하였으나, 자기 공명 영상 장치 외에 컴퓨터 단층 촬영 장치, 양전자 단층 촬영 장치 등 다른 의료 영상 장치들에도 전술한 내용의 실시예가 적용될 수 있다.
또한, 상기의 설명은 기술적 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명의 기술 분야에서 통상의 지식을 가진 자라면 본질적인 특성에서 벗어나지 않는 범위 내에서 다양한 수정, 변경 및 치환이 가능할 것이다. 따라서, 상기에 개시된 실시예 및 첨부된 도면들은 기술적 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시예 및 첨부된 도면에 의하여 기술적 사상의 범위가 한정되는 것은 아니다. 그 보호 범위는 아래의 청구범위에 의하여 해석되어야 하며, 그와 동등한 범위 내에 있는 모든 기술적 사상은 권리범위에 포함되는 것으로 해석되어야 할 것이다.
또한, 본 명세서에서 사용한 용어는 실시예를 설명하기 위해 사용된 것으로, 개시된 발명을 제한 및/또는 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 명세서에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는다.
또한, 본 명세서 전체에서 사용되는 "~부(unit)", "~기"등의 용어는 적어도 하나의 기능이나 동작을 수행하는 단위를 의미할 수 있다.
100: 자기 공명 영상 장치
110: 사용자 인터페이스
120: 제어부
121: 시퀀스 제어부
122: 움직임 판단부
123: 테이블 제어부
155a: 경사 인가부
155b: RF 인가부
150: 스캐너
151: 정자장 코일부
152: 경사 코일부
153: RF 코일부
160: 데이터 처리부
161: 데이터 수집부
162: 데이터 저장부
163: 영상 처리부
170: 신호 측정부
110: 사용자 인터페이스
120: 제어부
121: 시퀀스 제어부
122: 움직임 판단부
123: 테이블 제어부
155a: 경사 인가부
155b: RF 인가부
150: 스캐너
151: 정자장 코일부
152: 경사 코일부
153: RF 코일부
160: 데이터 처리부
161: 데이터 수집부
162: 데이터 저장부
163: 영상 처리부
170: 신호 측정부
Claims (25)
- 환자에 자기장 및 RF 신호를 인가하여 자기 공명 신호를 획득하는 스캐너;
상기 환자의 근전도 신호를 측정하는 신호 측정부;
상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부; 및
상기 자기 공명 신호를 저장하고, 상기 저장된 자기 공명 신호를 이용하여 자기 공명 영상을 재구성하는 데이터 처리부;를 포함하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 모션 아티팩트의 발생이 예측되면, 상기 자기 공명 신호를 재획득하도록 상기 스캐너를 제어하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 움직임 발생 시점에 대응되는 자기 공명 신호를 재획득하도록 상기 스캐너를 제어하는 자기 공명 영상 장치. - 제3항에 있어서,
상기 데이터 처리부는,
상기 저장된 자기 공명 신호 중에서 상기 환자의 움직임 발생 시점에 획득된 자기 공명 신호를 삭제하고, 상기 재획득된 자기 공명 신호를 이용하여 상기 자기 공명 영상을 재구성하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 데이터 처리부는,
상기 모션 아티팩트의 발생이 예측되면, 상기 자기 공명 영상에 후처리를 적용하여 상기 모션 아티팩트를 보정하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 신호 측정부는,
상기 자기 공명 신호가 획득되는 촬영 부위와 관련된 부위에 부착되는 적어도 하나의 측정 센서를 포함하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 신호 측정부는,
상기 자기 공명 신호의 획득이 시작되기 전부터 상기 환자의 근전도 신호를 측정하는 자기 공명 영상 장치. - 제 7 항에 있어서,
상기 제어부는,
상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호를 상기 자기 공명 신호의 획득이 시작되기 전에 측정된 상기 환자의 근전도 신호를 이용하여 필터링하는 자기 공명 영상 장치. - 제 7 항에 있어서,
상기 제어부는,
상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 움직임 패턴을 획득하고,
상기 환자의 움직임 패턴은, 상기 환자의 움직임 특성을 포함하는 자기 공명 영상 장치. - 제 9 항에 있어서,
상기 환자의 움직임 패턴은,
상기 환자의 움직임의 크기 및 상기 환자의 움직임의 종류 중 적어도 하나에 관한 정보를 포함하는 자기 공명 영상 장치. - 제 7 항에 있어서,
상기 제어부는,
상기 자기 공명 신호의 획득이 시작되기 전에 측정된 상기 환자의 근전도 신호에 패턴 학습을 적용하여 패턴 분류기를 생성하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 자기 공명 영상 장치. - 제 1 항에 있어서,
상기 제어부는,
상기 근전도 신호의 측정 시간이 기준시간 미만이면, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 자기 공명 영상 장치. - 제 13 항에 있어서,
상기 제어부는,
상기 근전도 신호의 측정 시간이 기준시간 이상이면, 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득하는 자기 공명 영상 장치. - 환자를 스캔하여 의료 영상 신호를 획득하는 스캐너;
상기 환자의 근전도 신호를 측정하는 신호 측정부; 및
상기 측정된 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고, 상기 판단된 환자의 움직임 특성에 기초하여 상기 환자의 움직임에 의한 모션 아티팩트(artifact)의 발생 여부를 예측하는 제어부;를 포함하는 의료 영상 장치. - 제 15 항에 있어서,
상기 신호 측정부는,
상기 자기 공명 신호의 획득이 시작되기 전부터 상기 환자의 근전도 신호를 측정하는 의료 영상 장치. - 제 16 항에 있어서,
상기 제어부는,
상기 자기 공명 신호의 획득이 시작된 이후에 측정된 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득하고,
상기 환자의 움직임 패턴은, 상기 환자의 움직임 특성을 포함하는 의료 영상 장치. - 제 16 항에 있어서,
상기 제어부는,
상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 의료 영상 장치. - 제 15 항에 있어서,
상기 제어부는,
상기 근전도 신호의 측정 시간이 기준시간 미만이면, 상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 의료 영상 장치. - 제 19 항에 있어서,
상기 제어부는,
상기 근전도 신호의 측정 시간이 기준시간 이상이면, 상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 근전도 신호로부터 상기 환자의 움직임 패턴을 획득하는 의료 영상 장치. - 환자의 근전도 신호를 측정하고;
상기 환자에 대한 자기 공명 촬영을 수행하고;
상기 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하고;
상기 환자의 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측하는 것을 포함하는 자기 공명 영상 장치의 제어방법. - 제 21 항에 있어서,
상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 움직임 발생 시점에 대응되는 자기 공명 신호를 재획득하는 것;을 더 포함하는 자기 공명 영상 장치의 제어방법. - 제 21 항에 있어서,
상기 모션 아티팩트의 발생이 예측되면, 상기 환자의 자기 공명 영상에 후처리를 적용하여 상기 모션 아티팩트를 보정하는 것;을 더 포함하는 자기 공명 영상 장치의 제어방법. - 제 21 항에 있어서,
상기 근전도 신호에 기초하여 상기 환자의 움직임 특성을 판단하는 것은,
상기 환자의 근전도 신호에 패턴 분류를 적용하여 상기 환자의 움직임 패턴을 획득하는 것;을 포함하는 자기 공명 영상 장치의 제어방법. - 제 21 항에 있어서,
상기 환자의 움직임 특성에 기초하여 모션 아티팩트의 발생 여부를 예측하는 것은,
상기 환자의 움직임 특성이 미리 설정된 임계값 이상으로 큰 경우에, 상기 모션 아티팩트가 발생할 것으로 예측하는 것을 포함하는 자기 공명 영상 장치의 제어방법.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150183012A KR101787369B1 (ko) | 2015-12-21 | 2015-12-21 | 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 |
| PCT/KR2016/014877 WO2017111412A1 (ko) | 2015-12-21 | 2016-12-19 | 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 |
| US16/064,623 US20180368721A1 (en) | 2015-12-21 | 2016-12-19 | Medical imaging device and magnetic resonance imaging device, and control method therefor |
| EP16879279.4A EP3366210A4 (en) | 2015-12-21 | 2016-12-19 | Medical imaging device and magnetic resonance imaging device, and control method therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150183012A KR101787369B1 (ko) | 2015-12-21 | 2015-12-21 | 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20170074033A true KR20170074033A (ko) | 2017-06-29 |
| KR101787369B1 KR101787369B1 (ko) | 2017-10-19 |
Family
ID=59090802
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150183012A KR101787369B1 (ko) | 2015-12-21 | 2015-12-21 | 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20180368721A1 (ko) |
| EP (1) | EP3366210A4 (ko) |
| KR (1) | KR101787369B1 (ko) |
| WO (1) | WO2017111412A1 (ko) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10398382B2 (en) * | 2016-11-03 | 2019-09-03 | Siemens Medical Solutions Usa, Inc. | Respiratory motion estimation in projection domain in nuclear medical imaging |
| US12042669B2 (en) | 2019-05-08 | 2024-07-23 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for motion tracking in radiation therapy |
| US11567156B2 (en) | 2019-05-08 | 2023-01-31 | Shanghai United Imaging Healthcare Co., Ltd. | Systems and methods for magnetic resonance imaging |
| CN110009709B (zh) | 2019-05-08 | 2023-07-07 | 上海联影医疗科技股份有限公司 | 医学图像成像方法和系统 |
| KR20200132665A (ko) | 2019-05-17 | 2020-11-25 | 삼성전자주식회사 | 집중 레이어를 포함하는 생성기를 기반으로 예측 이미지를 생성하는 장치 및 그 제어 방법 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07194575A (ja) * | 1994-01-06 | 1995-08-01 | Hitachi Medical Corp | 磁気共鳴イメージング装置 |
| US20050182456A1 (en) * | 2004-02-18 | 2005-08-18 | Ziobro John F. | Automated cortical mapping |
| RU2434238C2 (ru) * | 2006-07-18 | 2011-11-20 | Конинклейке Филипс Электроникс Н.В. | Подавление артефакта при многокатушечной магнитно-резонансной визуализации |
| JP5337406B2 (ja) | 2008-05-23 | 2013-11-06 | 株式会社日立メディコ | 磁気共鳴イメージング装置 |
| US20110046473A1 (en) * | 2009-08-20 | 2011-02-24 | Neurofocus, Inc. | Eeg triggered fmri signal acquisition |
| AU2012259507B2 (en) * | 2011-05-20 | 2016-08-25 | Nanyang Technological University | Systems, apparatuses, devices, and processes for synergistic neuro-physiological rehabilitation and/or functional development |
| KR101480036B1 (ko) * | 2012-10-18 | 2015-01-07 | 삼성전자주식회사 | Mri장치에서 영상을 획득하고 화면 상에 정보를 제공하는 방법 및 그 장치 |
| WO2014147519A1 (en) * | 2013-03-20 | 2014-09-25 | Koninklijke Philips N.V. | Neurophysiological monitoring for prospective motion gating in radiological imaging |
| KR101683176B1 (ko) * | 2015-03-30 | 2016-12-06 | 삼성전자주식회사 | 정보 제공 방법 및 정보 제공을 위한 자기 공명 영상 장치 |
-
2015
- 2015-12-21 KR KR1020150183012A patent/KR101787369B1/ko active IP Right Grant
-
2016
- 2016-12-19 WO PCT/KR2016/014877 patent/WO2017111412A1/ko active Application Filing
- 2016-12-19 EP EP16879279.4A patent/EP3366210A4/en not_active Withdrawn
- 2016-12-19 US US16/064,623 patent/US20180368721A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| EP3366210A1 (en) | 2018-08-29 |
| EP3366210A4 (en) | 2018-10-17 |
| KR101787369B1 (ko) | 2017-10-19 |
| US20180368721A1 (en) | 2018-12-27 |
| WO2017111412A1 (ko) | 2017-06-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101461099B1 (ko) | 자기공명영상장치 및 기능적 영상획득방법 | |
| KR101787369B1 (ko) | 의료 영상 장치, 자기 공명 영상 장치 및 그 제어 방법 | |
| CN107753020B (zh) | 医学成像设备及其控制方法 | |
| US9398855B2 (en) | System and method for magnetic resonance imaging based respiratory motion correction for PET/MRI | |
| US20170127972A1 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| US9712789B2 (en) | Method and apparatus to generate image data | |
| CN103376432B (zh) | 快速地位置分辨地确定检查区域内磁共振弛豫参数的方法 | |
| CN101991417B (zh) | 磁共振成像装置及其控制方法 | |
| KR101659142B1 (ko) | 영상 데이터를 생성하는 방법 | |
| CN103654781B (zh) | 借助激励检查对象进行磁共振成像的方法和磁共振设备 | |
| KR101664138B1 (ko) | 멀티 슬라이스 자기 공명 영상을 사용하는 조직 특성 감별 시스템 및 방법 | |
| US20160148378A1 (en) | Systems and Methods for Three-Dimensional Spiral Perfusion Imaging | |
| CN103792502A (zh) | 用于成像中时序的自动系统 | |
| KR101809213B1 (ko) | T2-이완 시간의 다중 슬라이스 영상화를 위한 방법 및 장치 | |
| JP4934525B2 (ja) | 核磁気共鳴装置 | |
| CN112394311B (zh) | 具有改进的导航器的mri系统 | |
| KR20160011012A (ko) | 자기 공명 영상 장치 및 그 제어 방법 | |
| WO2008132686A1 (en) | Quantification for mr parameters such as t1 or t2 in a sub-region of a subject | |
| JP2011036325A (ja) | 核磁気共鳴イメージング装置 | |
| WO2014170854A1 (en) | System and method for taking into account actual prepulse delay times in mri pulse sequences with shared prepulses | |
| CN118226355A (zh) | 磁共振成像系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right |