KR20170035547A - Remote controll device, remote controll method and remote controll system - Google Patents
Remote controll device, remote controll method and remote controll system Download PDFInfo
- Publication number
- KR20170035547A KR20170035547A KR1020150134523A KR20150134523A KR20170035547A KR 20170035547 A KR20170035547 A KR 20170035547A KR 1020150134523 A KR1020150134523 A KR 1020150134523A KR 20150134523 A KR20150134523 A KR 20150134523A KR 20170035547 A KR20170035547 A KR 20170035547A
- Authority
- KR
- South Korea
- Prior art keywords
- remote
- gesture
- remote control
- motion
- user
- Prior art date
Links
Images






















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
-
- G—PHYSICS
- G04—HOROLOGY
- G04G—ELECTRONIC TIME-PIECES
- G04G21/00—Input or output devices integrated in time-pieces
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0011—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement
- G05D1/0038—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot associated with a remote control arrangement by providing the operator with simple or augmented images from one or more cameras located onboard the vehicle, e.g. tele-operation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/017—Gesture based interaction, e.g. based on a set of recognized hand gestures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/03—Arrangements for converting the position or the displacement of a member into a coded form
- G06F3/033—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor
- G06F3/0346—Pointing devices displaced or positioned by the user, e.g. mice, trackballs, pens or joysticks; Accessories therefor with detection of the device orientation or free movement in a 3D space, e.g. 3D mice, 6-DOF [six degrees of freedom] pointers using gyroscopes, accelerometers or tilt-sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/41—Structure of client; Structure of client peripherals
- H04N21/422—Input-only peripherals, i.e. input devices connected to specially adapted client devices, e.g. global positioning system [GPS]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/41—Structure of client; Structure of client peripherals
- H04N21/422—Input-only peripherals, i.e. input devices connected to specially adapted client devices, e.g. global positioning system [GPS]
- H04N21/42204—User interfaces specially adapted for controlling a client device through a remote control device; Remote control devices therefor
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N21/00—Selective content distribution, e.g. interactive television or video on demand [VOD]
- H04N21/40—Client devices specifically adapted for the reception of or interaction with content, e.g. set-top-box [STB]; Operations thereof
- H04N21/47—End-user applications
- H04N21/472—End-user interface for requesting content, additional data or services; End-user interface for interacting with content, e.g. for content reservation or setting reminders, for requesting event notification, for manipulating displayed content
Abstract
Description
본 발명은 원격 제어장치, 원격 제어방법 및 원격 제어시스템에 관한 것이다.The present invention relates to a remote control device, a remote control method, and a remote control system.
최근에 단말기와 같이 사용자가 손에 직접 쥐고 사용하는 디바이스뿐만 아니라, 사용자가 신체에 직접 착용하여 휴대가 간편한 스마트 워치 또는 스마트 글래스와 같은 웨어러블 디바이스에 관심이 증가하고 있다. In recent years, there has been an increasing interest in wearable devices such as smart watches or smart glasses, which are worn by the user directly on the body and are easy to carry, as well as devices used by the user in the hands of the user.
이러한 웨어러블 디바이스에 경우, 휴대가 간편하여, 추후 일반적인 단말기 핸드폰을 대체할 수 있는 차세대 디바이스로 각광 받고 있다. In the case of such a wearable device, it is easy to carry and it is becoming popular as a next generation device that can replace a general terminal mobile phone later.
그런데 현재 웨어러블 디바이스를 컨트롤하기 위한 사용자 입력은 대부분 버튼이나 터치 스크린에 의존하고 있다. However, most user input for controlling wearable devices currently depends on buttons or touch screens.
그러나 웨어러블 디바이스는 사용자의 몸, 목, 머리, 손목 등 신체의 일부에 착용되면서, 기존의 터치 위치를 감지하는 터치 패널을 그대로 적용하였을 때, 입력이 어렵고 웨어러블의 장점이 퇴색될 수 있다. However, when the wearable device is applied to a part of the user's body such as the body, neck, head, wrist, and the touch panel that senses the existing touch position, the wearer can hardly input and the wearable advantage may be discolored.
따라서, 웨어러블 디바이스는 단순히 터치 위치만을 파악하는 기존 터치 센서들에서 벗어나, 웨어러블 디바이스 특성에 적합한 인터페이스 제공할 수 있는 센서들이 요구된다.Therefore, the wearable device is required to have a sensor that can provide an interface suitable for wearable device characteristics, apart from existing touch sensors that only grasp the touch position.
한편, 웨어러블 디바이스는 사용자의 몸에 착용되어 있기 때문에 언제, 어디서나 사용자 입력이 가능한 장점이 있다. On the other hand, since the wearable device is worn on the user's body, there is an advantage that the user can input anytime and anywhere.
이러한 웨어러블 디바이스를 이용하여 원거리의 외부 기기를 제어하는 원격 제어방법이 주목받고 있다. A remote control method for controlling a remote device using a wearable device has been attracting attention.
그러나 현재 웨어러블 디바이스를 이용한 원격 제어방법은 외부 기기와 웨어러블 디바이스의 특성을 반영하지 않는 인터페이스를 제공하는데 그치고 있다.However, at present, the remote control method using the wearable device only provides an interface that does not reflect characteristics of the external device and the wearable device.
실시예는 전술한 문제점을 해결하기 위한 것으로, 웨어러블 디바이스를 이용하여 효과적으로 외부 기기를 컨트롤할 수 있는 원격 제어장치, 원격 제어방법 및 원격 제어시스템을 제공하고자 한다.Embodiments of the present invention provide a remote control device, a remote control method, and a remote control system that can effectively control an external device using a wearable device.
실시예에 따른 원격 제어장치는 사용자의 입력에 따라 원격으로 외부 기기를 제어하는 와치 타입 웨어러블 원격 제어장치로서, 상기 외부 기기를 제어하는 원격 실행 신호를 상기 외부 기기로 전송하는 무선 통신부; 상기 사용자의 제스처를 감지하는 제스처 센서; 상기 사용자의 모션을 감지하는 모션 센서; 및 상기 감지된 사용자의 제스처에 따라서 제어 모드를 결정하고, 상기 결정된 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성하는 제어부;를 포함한다. A remote control apparatus according to an embodiment of the present invention includes a wireless communication unit for transmitting a remote execution signal for controlling the external device to the external device, A gesture sensor for sensing a gesture of the user; A motion sensor for sensing motion of the user; And a control unit for determining a control mode according to the sensed user's gesture and generating a remote execution signal according to the motion of the sensed user in the determined control mode.
이때, 상기 제스처는 상기 원격 제어장치를 착용한 상태에서 취한 유지 가능한 몸짓이고, 상기 제스처 센서는 적어도 2 이상의 제스처를 감지할 수 있다. At this time, the gesture is a sustainable gesture taken while wearing the remote control device, and the gesture sensor can sense at least two gestures.
또한, 상기 제스처 센서는 주먹을 쥐고 있는 몸짓, 주먹을 피고 있는 몸짓 및 적어도 1 이상의 손가락을 피는 몸짓을 감지할 수 있다. In addition, the gesture sensor can sense a gesture holding a fist, a gesture holding a fist, and a gesture of bending at least one finger.
또한, 상기 제스처 센서는 상기 사용자의 제스처에 따른 원격 제어장치와의 접촉 면적 변화를 정전용량 변화로 감지할 수 있다.In addition, the gesture sensor may detect a change in the contact area with the remote control device according to the gesture of the user as a change in capacitance.
또한, 상기 모션 센서는, 가속도 센서(acceleration sensor), 자이로스코프 센서(gyroscope sensor) 및 중력 센서(geomagnetic sensor) 중 적어도 둘 이상을 포함하여 적어도 둘 이상의 모듈로 각기 다른 모션을 감지할 수 있다. The motion sensor may include at least two of an acceleration sensor, a gyroscope sensor, and a geomagnetic sensor, so that the motion sensor can detect different motions by at least two or more modules.
또한, 상기 가속도 센서는, 상기 사용자가 손목을 특정 방향으로 이동시키는 제 1 모션을 감지하고, 상기 자이로스코프 센서, 상기 사용자가 손목을 특정 방향으로 기울이는 제 2 모션을 감지할 수 있다.The acceleration sensor may sense a first motion that the user moves the wrist in a specific direction, and sense the gyroscope sensor, a second motion in which the user tilts the wrist in a specific direction.
또한, 상기 제어부는, 상기 제스처 센서에서 제 1 제스처를 감지하면 제 1 제어 모드에서, 제 2 제스처를 감지하면 제 2 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성할 수 있다.The control unit may generate a remote execution signal according to the motion of the sensed user in a first control mode when the gesture sensor detects the first gesture and in a second control mode when the second gesture is sensed.
또한, 상기 제어부는, 상기 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성하고, 상기 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성하고, 상기 제 1 원격 실행 신호와 상기 제 3 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어할 수 있다. The control unit may generate a first remote execution signal upon first motion detection in the first control mode, generate a third remote execution signal upon first motion detection in the second control mode, The execution signal and the third remote execution signal can control different characteristics of the external device.
이, 상기 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성하고, 상기 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성하고, 상기 제 1 원격 실행 신호 내지 상기 제 4 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어할 수 있다. Generates a second remote control signal when the second motion detection is performed in the first control mode, generates a fourth remote control signal when the second motion detection is performed in the second control mode, And the fourth remote execution signal can control different characteristics of the external device.
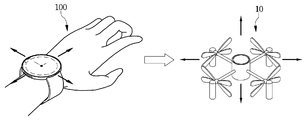
또한, 상기 외부 기기는 드론일 수 있다. Also, the external device may be a drone.
이때, 상기 제 1 제어 모드는 상기 드론을 상승시키는 상태에서 제어 모드이고, 상기 제 2 제어 모드는 상기 드론을 하강시키는 상태에서 제어일 수 있다. At this time, the first control mode may be a control mode in a state of raising the drones, and the second control mode may be a control in a state of lowering the drones.
또한, 상기 제어부는, 상기 제 1 모션 감지시 상기 드론의 기울기를 제어할 수 있다. 원격 실행 신호를 생성할 수 있다.In addition, the controller may control the inclination of the drones upon sensing the first motion. A remote execution signal can be generated.
또한, 상기 제어부는, 상기 제 2 모션 감지시 상기 드론의 가속 방향을 제어하는 원격 실행 신호를 생성할 수 있다.In addition, the controller may generate a remote execution signal for controlling the acceleration direction of the drones upon sensing the second motion.
또한, 상기 제 1 제어 모드는 상기 드론의 이동 특성을 제어하는 모드이고, 상기 제 2 제어 모드는 상기 드론의 카메라를 제어하는 모드일 수 있다. Also, the first control mode may be a mode for controlling the movement characteristics of the drone, and the second control mode may be a mode for controlling the camera of the drones.
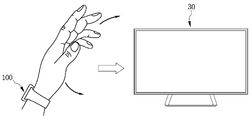
한편, 상기 외부 기기는 스마트 티비일 수 있다. Meanwhile, the external device may be a smart TV.
이때, 상기 제 1 제어 모드는 상기 스마트 티비의 채널을 제어하는 모드이고, 상기 제 2 제어 모드는 상기 스마트 티비의 음향을 제어하는 모드일 수 있다. In this case, the first control mode may be a mode for controlling the channel of the smart TV, and the second control mode may be a mode for controlling the sound of the smart TV.
또한, 상기 무선 통신부는 블루투스 통신 방식으로 근접 거리에 위치한 상기 외부 기기에 직접 상기 원격 실행 신호를 전송하는 근거리 통신 모듈을 포함할 수 있다.The wireless communication unit may include a short range communication module for transmitting the remote execution signal directly to the external device located at a close distance in a Bluetooth communication system.
또한, 상기 제스처 감지 상태 및 상기 모션 감지 상태를 출력하는 출력부를 더 포함할 수 있다.The apparatus may further include an output unit outputting the gesture sensing state and the motion sensing state.
또한, 실시예에 따른 원격 제어방법은 와치 타입 원격 제어장치를 이용하여 외부 기기를 원격 제어하는 방법으로서, 원격 제어를 시작하는 단계; 사용자의 제스처를 감지하는 단계; 상기 사용자의 제스처 상태에 따라서 제어 모드를 결정하는 단계; 상기 결정된 제어 모드에서 상기 사용자의 모션 입력을 감지하는 단계; 상기 결정된 제어 모드에서 상기 모션 입력에 따른 원격 실행신호를 생성하는 단계; 및 상기 원격 실행신호를 상기 외부 기기로 무선 전송하는 단계;를 포함한다.According to another aspect of the present invention, there is provided a remote control method for remotely controlling an external device using a watch-type remote control device, comprising: starting a remote control; Detecting a gesture of the user; Determining a control mode according to the gesture state of the user; Sensing the motion input of the user in the determined control mode; Generating a remote execution signal according to the motion input in the determined control mode; And wirelessly transmitting the remote execution signal to the external device.
또한, 실시예에 따른 원격 제어시스템은 와치 타입 웨어러블 디바이스로 사용자의 제스처에 따라 제어 모드를 결정하고, 결정된 제어 모드에서 입력된 모션에 따라 원격 실행신호를 생성하고, 상기 원격 실행신호를 무선 전송하는 원격 제어장치; 및 상기 원격 제어 장치로부터 상기 원격 실행신호를 수신하고, 상기 수신된 원격 실행신호에 따라 제어되는 외부 기기를 포함한다.In addition, the remote control system according to the embodiment may determine the control mode according to the gesture of the user with the watch-type wearable device, generate the remote execution signal according to the input motion in the determined control mode, Remote control device; And an external device receiving the remote execution signal from the remote control device and being controlled according to the received remote execution signal.
실시예에 따른 원격 제어장치, 제어방법 제어시스템은 제스처와 모션을 통해 직관적으로 손쉽게 외부 기기를 제어할 수 있는 사용자 인터페이스를 제공할 수 있다. The remote control device and the control method control system according to the embodiments can provide a user interface that can easily control an external device intuitively through a gesture and a motion.
자세히, 실시예에 따른 원격 제어장치는 기존의 터치 입력 방식이 아닌 새로운 입력 방식을 제공할 수 있다. In detail, the remote controller according to the embodiment can provide a new input method instead of the conventional touch input method.
좀더 자세히, 원격 제어장치의 제스처 센서는 착용한 사용자가 입력하기 적합한 적어도 둘 이상의 사용자 제스처를 감지할 수 있다. More specifically, the gesture sensor of the remote control device can sense at least two user gestures suitable for input by the wearer.
그리고 제스처 센서의 센서 전극은 사용자의 제스처에 따른 밴드와의 접촉 면적 변화를 정전용량 변화로 감지할 수 있다. And the sensor electrode of the gesture sensor can detect the change of the contact area with the band according to the gesture of the user by the capacitance change.
이러한 정전용량 방식의 센서 전극은 밴드부재 내에 배치되어도 제스쳐 감지가 가능하므로, 외부 환경으로부터 제스쳐 센서를 안전하게 보호할 수 있고, 밴드 형상는 디자인적 제약에서도 벗어날 수 있다. Such a capacitive sensor electrode can be gesture-detected even if it is disposed in the band member, so that the gesture sensor can be safely protected from the external environment, and the band shape can be avoided from design constraints.
또한, 이러한 제스처 센서는 사용자와 센서 전극 사이의 거리에 따라서 정밀하게 변화하는 정전용량 감지하므로, 사용자의 제스쳐를 정확하게 인식할 수 있는 장점이 있다. In addition, since the gesture sensor senses the capacitance that changes precisely according to the distance between the user and the sensor electrode, the gesture sensor can accurately recognize the user's gesture.
한편, 모션 센서는 적어도 둘 이상의 센서를 포함하여 적어도 둘 이상의 사용자 모션을 정밀하게 감지할 수 있다. On the other hand, the motion sensor can accurately detect at least two or more user motions including at least two sensors.
특히, 실시예에 따른 원격 제어장치는 제스처와 모션을 구분하여 적어도 2 단계로 실행 신호 생성하는 제어 모드를 제공함으로써, 단순한 제스처와 모션으로 많은 실행 신호를 생성할 수 있다. In particular, the remote control apparatus according to the embodiment provides a control mode in which a gesture and a motion are separated to generate an execution signal in at least two stages, thereby generating a large number of execution signals in a simple gesture and motion.
그리고 이렇게 생성된 많은 실행 신호들을 외부 기기에 특화시킨 사용자 인터페이스를 제공할 수 있다. And, it is possible to provide a user interface in which a large number of execution signals generated in this way are specialized for external devices.
즉, 실시예에 따른 원격 제어시스템은 제어하려는 외부 기기의 특성에 맞는 직관적인 사용자 인터페이스를 제공할 수 있는 장점이 있다.That is, the remote control system according to the embodiment has an advantage of providing an intuitive user interface that matches the characteristics of an external device to be controlled.
도 1은 원격 제어시스템을 설명하기 위한 도면이다.
도 2는 본 발명의 실시예에 따른 웨어러블 디바이스의 사시도를 나타낸다.
도 3은 본 발명의 실시예에 따른 웨어러블 디바이스의 내부 블록도를 나타낸다.
도 4는 본 발명의 실시예에 따른 제스처 센서를 나타내기 위한 밴드 부분의 투시도를 나타낸다.
도 5는 본 발명의 실시예에 따른 제 1 제스처를 감지하는 방법을 설명하기 위한 도면들이다.
도 6은 본 발명의 실시예에 따른 제 2 제스처를 감지하는 방법을 설명하기 위한 도면들이다.
도 7은 본 발명의 실시예에 따른 모션 센서를 설명하기 위한 도면이다.
도 8은 본 발명의 실시예에 따른 디스플레이부의 화면을 나타낸다.
도 9는 본 발명의 실시예에 따른 원격 제어장치를 이용해 외부 기기를 원격 제어하는 과정을 설명하기 위한 흐름도이다.
도 10은 본 발명의 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 11은 본 발명의 실시예에 따른 제스처에 따른 원격 제어를 설명하기 위한 도면이다.
도 12는 본 발명의 실시예에 따른 제 2 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 13은 본 발명의 실시예에 따른 제 1 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 14는 본 발명의 다른 실시예에 따른 원격 제어를 설명하기 위한 도면이다.
도 15는 본 발명의 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 16은 본 발명의 다른 실시예에 따른 제 1 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 17은 본 발명의 다른 실시예에 따른 제 2 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다.
도 18은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 19 내지 22는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다.
도 23은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다.
도 24 내지 25는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다.1 is a diagram for explaining a remote control system.
2 is a perspective view of a wearable device according to an embodiment of the present invention.
3 shows an internal block diagram of a wearable device according to an embodiment of the present invention.
4 illustrates a perspective view of a band portion for illustrating a gesture sensor according to an embodiment of the present invention.
5 is a view for explaining a method of detecting a first gesture according to an embodiment of the present invention.
6 is a view for explaining a method of detecting a second gesture according to an embodiment of the present invention.
7 is a view for explaining a motion sensor according to an embodiment of the present invention.
8 shows a screen of a display unit according to an embodiment of the present invention.
9 is a flowchart illustrating a process of remotely controlling an external device using a remote control device according to an embodiment of the present invention.
10 is a block diagram showing an example of a remote control system according to an embodiment of the present invention.
11 is a view for explaining a remote control according to a gesture according to an embodiment of the present invention.
12 is a view for explaining remote control according to the second motion according to the embodiment of the present invention.
13 is a view for explaining remote control according to the first motion according to the embodiment of the present invention.
14 is a diagram for explaining a remote control according to another embodiment of the present invention.
15 is a block diagram showing an example of a remote control system according to another embodiment of the present invention.
16 is a diagram for explaining remote control according to motion in a first control mode according to another embodiment of the present invention.
17 is a view for explaining remote control according to motion in a second control mode according to another embodiment of the present invention.
18 is a block diagram showing an example of a remote control system according to another embodiment of the present invention.
19 to 22 are views showing a state in which remote control is performed according to another embodiment of the present invention.
23 is a block diagram showing an example of a remote control system according to another embodiment of the present invention.
24 to 25 are views showing a state in which remote control is performed according to another embodiment of the present invention.
이하, 첨부된 도면을 참조하여 본 명세서에 개시된 실시 예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 유사한 구성요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 이하의 설명에서 사용되는 구성요소에 대한 접미사 "모듈" 및 "부"는 명세서 작성의 용이함만이 고려되어 부여되거나 혼용되는 것으로서, 그 자체로 서로 구별되는 의미 또는 역할을 갖는 것은 아니다. Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings, wherein like reference numerals are used to designate identical or similar elements, and redundant description thereof will be omitted. The suffix "module" and " part "for the components used in the following description are given or mixed in consideration of ease of specification, and do not have their own meaning or role.
또한, 본 명세서에 개시된 실시 예를 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 명세서에 개시된 실시 예의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다. 또한, 첨부된 도면은 본 명세서에 개시된 실시 예를 쉽게 이해할 수 있도록 하기 위한 것일 뿐, 첨부된 도면에 의해 본 명세서에 개시된 기술적 사상이 제한되지 않으며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. In the following description of the embodiments of the present invention, a detailed description of related arts will be omitted when it is determined that the gist of the embodiments disclosed herein may be blurred. It is to be understood that both the foregoing general description and the following detailed description are exemplary and explanatory and are intended to provide further explanation of the invention as claimed. , ≪ / RTI > equivalents, and alternatives.
이하, 첨부한 도면을 참조하여 본 발명의 실시예를 상세하게 설명하면 다음과 같다.
Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명의 실시예에 따른 원격 제어시스템을 설명하기 위한 도면이다. 1 is a view for explaining a remote control system according to an embodiment of the present invention.
웨어러블 디바이스는 사용자에게 항상 착용되어 있어 외부 기기를 원격 제어하는데 사용할 경우, 사용자 편의를 증진시킬 수 있다. The wearable device is always worn by the user, so that it is possible to improve user convenience when the wearable device is used for remote control of an external device.
예를 들어, 도 1을 참조하면, 사용자는 외부 기기로 디스플레이 장치나 차량, 가전 제품 및 드론 등을 웨어러블 디바이스를 이용하여 원격 제어할 수 있다. For example, referring to FIG. 1, a user can remotely control a display device, a vehicle, a household appliance, a drone, and the like using an external device using a wearable device.
사용자가 착용 가능한 웨어러블 디바이스는 사용자의 목에 착용되는 넷밴드 타입 디바이스(neckband type device), 사용자의 머리에 착용되는 헤드셋 타입 디바이스(headset type device) 또는 사용자의 손목에 착용되는 워치 타입 디바이스 등이 있을 수 있다. A user wearable wearable device may be a neckband type device worn on the user's neck, a headset type device worn on the user's head, or a watch type device worn on the wearer's wrist .
실시예는 이러한 웨어러블 디바이스 중 와치 타입 웨어러블 디바이스를 원격 제어장치로 설명하나, 전술한 다양한 타입의 웨어러블 디바이스에도 실시예가 적용될 수 있음은 당연하다.
The embodiment describes a watch-type wearable device as a remote control device among these wearable devices, but it goes without saying that the embodiment can be applied to various types of wearable devices described above.
도 2는 본 발명의 실시예에 따른 웨어러블 디바이스의 사시도를 나타내고, 도 3은 본 발명의 실시예에 따른 웨어러블 디바이스의 내부 블록도를 나타낸다.FIG. 2 is a perspective view of a wearable device according to an embodiment of the present invention, and FIG. 3 is an internal block diagram of a wearable device according to an embodiment of the present invention.
이하, 도 2 내지 도 3을 참조하여, 실시예에 따른 원격 제어장치(100)를 좀더 상세히 설명한다. Hereinafter, the
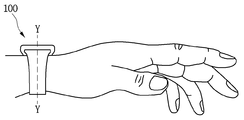
외부에서 보면, 원격 제어장치(100)는 본체(201), 밴드(205) 및 파스너(207)를 포함할 수 있다. The
먼저, 본체(201)는 외관을 형성하는 케이스를 포함할 수 있다. 이러한 본체(201)의 케이스 내부에는 각종 전자부품들을 수용할 수 있는 내부 공간이 마련될 수 있다. 이때, 본체(201)는 내부 공간 마련을 위해 제 1 케이스 및 제 2 케이스로 분리 및 체결될 수도 있다. First, the
이러한 본체(201)의 전면에는 디스플레이부(151)가 배치되어 정보를 출력할 수 있다. 그리고 디스플레이부(151) 상에는 터치 센서가 배치되어 터치 스크린으로 구비될 수 있다. A
이러한 터치 스크린은 원 형상을 가질 수 있으나, 이에 한정될 필요는 없고, 타원 형상, 사각 형상을 가질 수도 있다. 실시예의 터치 스크린의 형상은 사용자에게 시각적으로 좋은 이미지를 줄 수 있으며 사용자의 터치 스크린의 조작에 도움이 될 수 있으면 어떠한 형상이라도 상관없다. Such a touch screen may have a circular shape, but is not limited thereto, and may have an elliptical shape or a rectangular shape. The shape of the touch screen of the embodiment may be any shape as long as it can give a visually good image to the user and can help the user to operate the touch screen.
이러한 본체(201)에는 밴드(205)가 연결될 수 있다. 이러한 밴드(205)는 손목에 착용되어 손목을 감싸도록 형성될 수 있다. A
또한, 밴드(205)는 착용이 용이하도록 플렉서블한 재질로 형성될 수도 있다. 일례로, 밴드(205)는 가죽, 고무, 실리콘, 합성수지 재질 등으로 형성될 수 있다. In addition, the
그리고 이러한 밴드(205)에는 착용을 위한 파스너(207)(fastener)가 구비될 수 있다. 파스너(207)는 버클(buckle), 스냅핏(snap-fit)이 가능한 후크(hook) 구조, 또는 벨크로(velcro; 상표명) 등에 의하여 구현될 수 있으며, 신축성이 있는 구간 또는 재질을 포함할 수 있다. 실시예는, 파스너(207)가 버클 형태로 구현된 예를 제시하고 있다. The
한편, 원격 제어장치(100)의 디스플레이부(151)는 터치 스크린으로 구현되어, 원격 제어장치(100)에서 구동되는 응용 프로그램의 실행화면 정보, 또는 이러한 실행화면 정보에 따른 UI, GUI 정보를 표시할 수 있다. 이 경우, 사용자는 UI 또는 GUI에의 터치 입력에 의하여, 원격 제어장치(100)를 제어할 수 있다.On the other hand, the
원격 제어장치(100)는 손목에 착용하는 기기의 특성상, 디스플레이부(151)의 크기에 제약을 받는다. 일반적으로 디스플레이부(151)는 작게 구현되며, 이에 따라 디스플레이부(151)에 표시되는 UI 및 GUI 역시 작게 표시된다. The
따라서, 사용자가 손가락으로 디스플레이부(151)를 터치하는 경우, 손가락이 디스플레이부(151)의 상당 부분을 가리게 된다. 이로 인해, 사용자는 의도하지 않은 UI 또는 GUI를 잘못 터치하거나, 크기가 작은 UI 또는 GUI를 터치하는데 어려움을 겪을 수 있다.Therefore, when the user touches the
이와 같이, 원격 제어장치(100)에서는 기존의 터치 입력 방식으로 기기를 제어하는데 많은 불편함이 존재한다. 따라서, 기존의 터치 입력 방식이 아닌 새로운 입력 방식이 요구된다.
As described above, the
이러한 원격 제어장치(100)는 무선 통신부(110), 입력부(120), 센서부(140), 출력부(150), 인터페이스부(160), 메모리(170), 제어부(180) 및 전원 공급부(190) 등을 포함할 수 있다. 도 3에 도시된 구성요소들은 원격 제어장치(100)를 구현하는데 있어서 필수적인 것은 아니어서, 본 명세서 상에서 설명되는 원격 제어장치(100)는 위에서 열거된 구성요소들 보다 많거나, 또는 적은 구성요소들을 가질 수 있다. The
먼저, 구성요소들 중 무선 통신부(110)는, 원격 제어장치(100)와 무선 통신 시스템 사이, 원격 제어장치(100)와 외부 기기 사이의 무선 통신을 가능하게 하는 하나 이상의 모듈을 포함할 수 있다. 또한, 무선 통신부(110)는, 원격 제어장치(100)를 하나 이상의 네트워크에 연결하는 하나 이상의 모듈을 포함할 수 있다.First, the
이러한 무선 통신부(110)는, 원격 제어장치(100)에서 센싱된 사용자의 다양한 제스쳐, 모션 입력에 대한 데이터를 외부 기기로 전송할 수 있다. 또한, 전송된 데이터에 대한 외부 기기의 피드백을 수신하여 제어부(180)로 전송할 수 있다. The
이러한 무선 통신부(110)는, 방송 수신 모듈(111), 이동통신 모듈(112), 무선 인터넷 모듈(113), 근거리 통신 모듈(114), 위치정보 모듈(115) 중 적어도 하나를 포함할 수 있다.The
좀더 자세히, 이동통신 모듈(112)은, 이동통신을 위한 기술표준들 또는 통신방식(예를 들어, GSM(Global System for Mobile communication), CDMA(Code Division Multi Access), CDMA2000(Code Division Multi Access 2000), EV-DO(Enhanced Voice-Data Optimized or Enhanced Voice-Data Only), WCDMA(Wideband CDMA), HSDPA(High Speed Downlink Packet Access), HSUPA(High Speed Uplink Packet Access), LTE(Long Term Evolution), LTE-A(Long Term Evolution-Advanced) 등)에 따라 구축된 이동 통신망 상에서 기지국, 외부의 단말, 서버 중 적어도 하나와 무선 신호를 송수신한다. In more detail, the
무선 신호는, 외부 기기 원격제어 신호, 음성 호 신호, 화상 통화 호 신호 또는 문자/멀티미디어 메시지 송수신에 따른 다양한 형태의 데이터를 포함할 수 있다. The wireless signal may include various types of data related to an external device remote control signal, a voice call signal, a video call signal, or a text / multimedia message transmission / reception.
무선 인터넷 모듈(113)은 무선 인터넷 접속을 위한 모듈을 말하는 것으로, 원격 제어장치(100)에 내장되거나 외장될 수 있다. 무선 인터넷 모듈(113)은 무선 인터넷 기술들에 따른 통신망에서 무선 신호를 송수신하도록 이루어진다.The
무선 인터넷 기술로는, 예를 들어 WLAN(Wireless LAN), Wi-Fi(Wireless-Fidelity), Wi-Fi(Wireless Fidelity) Direct, DLNA(Digital Living Network Alliance), WiBro(Wireless Broadband), WiMAX(World Interoperability for Microwave Access), HSDPA(High Speed Downlink Packet Access), HSUPA(High Speed Uplink Packet Access), LTE(Long Term Evolution), LTE-A(Long Term Evolution-Advanced) 등이 있으며, 무선 인터넷 모듈(113)은 상기에서 나열되지 않은 인터넷 기술까지 포함한 범위에서 적어도 하나의 무선 인터넷 기술에 따라 데이터를 송수신하게 된다. WiBro, HSDPA, HSUPA, GSM, CDMA, WCDMA, LTE, LTE-A 등에 의한 무선인터넷 접속은 이동통신망을 통해 이루어진다는 관점에서 본다면, 이동통신망을 통해 무선인터넷 접속을 수행하는 무선 인터넷 모듈(113)은 이동통신 모듈(112)의 일종으로 이해될 수도 있다.Wireless Internet technologies include, for example, wireless LAN (WLAN), wireless fidelity (Wi-Fi), wireless fidelity (Wi-Fi) Direct, DLNA (Digital Living Network Alliance), WiBro Interoperability for Microwave Access, High Speed Downlink Packet Access (HSDPA), High Speed Uplink Packet Access (HSUPA), Long Term Evolution (LTE) and Long Term Evolution-Advanced (LTE-A) Transmits and receives data according to at least one wireless Internet technology, including Internet technologies not listed above. The
특히, 근거리 통신 모듈(114)은 근거리 통신(Short range communication)을 위한 것으로서, 블루투스(Bluetooth™), RFID(Radio Frequency Identification), 적외선 통신(Infrared Data Association; IrDA), UWB (Ultra Wideband), ZigBee, NFC(Near Field Communication), Wi-Fi(Wireless-Fidelity), Wi-Fi Direct, Wireless USB(Wireless Universal Serial Bus) 기술 중 적어도 하나를 이용하여, 근거리 통신을 지원할 수 있다. 이러한, 근거리 통신 모듈(114)은, 근거리 무선 통신망(Wireless Area Networks)을 통해 원격 제어장치(100)와 외부 기기 사이, 원격 제어장치(100)와 무선 통신 시스템 사이, 원격 제어장치(100)와 다른 원격 제어장치 사이, 또는 원격 제어장치(100)와 이동 단말기(또는 외부서버)가 위치한 네트워크 사이의 무선 통신을 지원할 수 있다. 근거리 무선 통신망은 근거리 무선 개인 통신망(Wireless Personal Area Networks)일 수 있다.In particular, the short-
근거리 통신 모듈(114)은, 원격 제어장치(100) 주변에 제어 가능한 다른 외부 기기를 감지(또는 인식)할 수 있다. The short-
실시예에서, 제어부(180)는 근거리 통신 모듈(114)을 이용하여 외부 기기를 제어하는 것으로 설명하나, 이에 한정되지는 않는다. 예를 들어, 제어부(180)는 근거리 통신 모듈(114)를 통해 블루투스 통신 방식으로 근접 거리에 위치한 외부 기기에 원격 제어신호를 직접 보내 외부 기기를 원격 제어할 수 있다. 근거리 통신 모듈(114)을 이용할 경우, 중계 네트워크를 거치지 않아 보안성이 높고 및 반응 속도가 빠른 측면에서 원격 제어에 유리할 수 있다.
In the embodiment, the
입력부(120)는, 영상 신호 입력을 위한 카메라(121) 또는 영상 입력부, 오디오 신호 입력을 위한 마이크로폰(microphone, 122), 또는 오디오 입력부, 사용자로부터 정보를 입력받기 위한 사용자 입력부(123, 예를 들어, 터치키(touch key), 푸시키(mechanical key) 등)를 포함할 수 있다. 입력부(120)에서 수집한 음성 데이터나 이미지 데이터는 분석되어 사용자의 제어명령으로 처리될 수 있다.
The
센서부(140)는 원격 제어장치(100) 내 정보, 원격 제어장치(100)를 둘러싼 주변 환경 정보 및 사용자 입력 중 적어도 하나를 센싱하기 위한 하나 이상의 센서를 포함할 수 있다. The
실시예에서, 센서부(140)는 원격 제어장치(100)를 착용한 사용자가 입력하기 적합한 적어도 둘 이상의 사용자 입력을 감지할 수 있다. In an embodiment, the
자세히, 센서부(140)는 사용자 입력을 감지하는 제스처 센서(130), 모션 센서(141) 및 주변 환경 정보를 감지하는 기타 센서(142) 중 적어도 둘 이상을 포함할 수 있다. In detail, the
먼저, 제스처 센서(130)는 사용자의 제스처 입력을 감지할 수 있다. 여기서, 사용자의 제스처는 사용자가 원격 제어장치(100)를 착용한 상태에서 취한 몸짓을 의미한다. 이때, 몸짓은 단순 일회 움직임이 아닌 유지 가능한 몸짓을 의미할 수 있다. First, the
예를 들어, 와치 타입 원격 제어장치(100)에서 제스처는 주먹을 쥐고 있는 몸짓, 주먹을 피고 있는 몸짓 및 적어도 1 이상의 손가락을 피는 몸짓 등을 포함할 수 있다. For example, in the watch-type
실시예에서, 제스처 센서(130)는 원격 제어장치(100)의 밴드(205)에 위치하여 사용자의 제스처를 감지할 수 있다.
In an embodiment, the
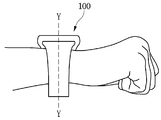
도 4는 본 발명의 실시예에 따른 제스처 센서(130)를 나타내기 위한 밴드(205) 부분의 투시도를 나타내고, 도 5는 본 발명의 실시예에 따른 제 1 제스처를 감지하는 방법을 나타내고, 도 6은 본 발명의 실시예에 따른 제 2 제스처를 감지하는 방법을 나타낸다. Figure 4 shows a perspective view of a portion of a
이하 도 4 내지 도 6을 참조하여, 제스처 센서(130)에 대해 좀더 상세히 설명한다. 4 to 6, the
도 4를 참조하면, 제스처 센서(130)는 적어도 하나 이상의 전극패턴을 포함하는 센서 전극(131)과, 센서 전극(131)과 연결되는 센서 배선 전극(133)과, 배선 전극과 제어부(180)를 연결하는 인쇄회로기판(135)을 포함할 수 있다. 4, the
실시예에 따른 센서 전극(131)은 사용자가 제스처를 취했을 때, 밴드(205)에 사용자의 착용부위가 접촉하는 면적을 측정하여, 사용자의 제스처를 감지할 수 있다. The
자세히, 센서 전극(131)은 사용자의 제스처에 따른 밴드(205)와의 접촉 면적 변화를 정전용량 변화로 감지할 수 있다. 예를 들어, 제스처에 따른 사용자의 착용부위와 밴드(205)에 배치된 센서 전극(131) 사이의 거리 변화를 정전용량의 변화로 감지할 수 있다. In detail, the
이러한 정전용량의 변화는 착용부위와 센서 전극(131)이 일정 거리 이상 이격되어도 사용자의 제스쳐를 감지할 수 있다. 따라서, 센서 전극(131)은 둘러싸는 밴드(205)부재 내에 배치되어도 제스쳐 감지가 가능하므로, 외부 환경으로부터 제스쳐 센서를 안전하게 보호할 수 있고, 밴드(205) 형상는 디자인적 제약에서도 벗어날 수 있다. Such a change in the electrostatic capacity can detect the user's gesture even if the wearer's position and the
또한, 이러한 제스처 센서(130)는 사용자와 센서 전극(131) 사이의 거리에 따라서 정밀하게 변화하는 정전용량 감지하므로, 사용자의 제스쳐를 정확하게 인식할 수 있는 장점이 있다. Also, since the
실시예와 달리, 제스처 센서(130)는 사용자의 제스쳐에 따른 신호 변화로 골격근에서 발생하는 전기적인 신호(EMG)를 이용하여 제스처를 감지할 수도 있다. 다만, EMG 신호를 이용할 경우, EMG를 인식하기 위한 센서 전극(131)이 원격 제어장치(100) 외부로 노출되어야 해, 디자인적인 제약이 있고 외부 환경에 취약할 수 있다.
Unlike the embodiment, the
실시예로 돌아와, 도 4를 보면 제스처 센서(130)는 적어도 하나 이상의 전극패턴을 포함하는 센서 전극(131)과, 센서 전극(131)과 연결되는 센서 배선 전극(133)과, 센서 배선 전극(133)과 제어부(180)를 연결하는 인쇄회로기판(135)을 포함할 수 있다. 4, the
자세히, 센서 전극(131)은 적어도 하나 이상의 전극패턴을 포함할 수 있다. More specifically, the
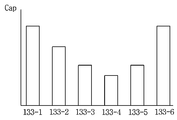
예를 들어, 복수의 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)이 나열된 구조일 수 있다. 자세하게, 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)은 바(bar) 패턴을 가지며, 밴드(205) 내에서 서로 접촉하지 않도록 소정의 간격만큼 이격되어 좌우 반복 나열될 수 있다. 좀더 자세하게, 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)들은 세로가 길게 형성된 바 패턴으로, 이러한 복수의 바 패턴이 등 간격으로 이격되어 가로 방향으로 나열되도록 배치될 수 있다. 실시예에서 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)이 바 형태인 것으로 도시하였으나, 실시예가 이에 한정되는 것은 아니다. 즉, 센서 전극(131)은 밴드(205)형 센서가 사용자에게 착용되었을 때, 사용자의 신체 일부와 접촉되었는지를 감지할 수 있는 다양한 형상을 가질 수 있다. For example, it may be a structure in which a plurality of electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 are arranged. In detail, the electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 have bar patterns, And can be repeatedly arranged left and right. More specifically, the electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 are bar patterns that are elongated in length, and the plurality of bar patterns are spaced apart at regular intervals And may be arranged to be arranged in the horizontal direction. Although the electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 are bar-shaped in the embodiment, the embodiment is not limited thereto. That is, the
또한, 센서 전극(131)의 복수의 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)들은 좌우 대칭되도록 배치될 수 있다. 자세하게, 복수의 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)의 수가 짝수인 경우, 밴드(205)의 중심을 기준선으로 좌측의 전극패턴(131-1, 131-2, 131-3)의 개수와 우측의 전극 패턴(31-4, 131-5, 131-6)의 개수는 같을 수 있으며, 기준선에서 좌우 대칭되도록 배치될 수 있다. 또는, 복수의 전극패턴의 수가 홀수인 경우, 기준선에 전극 패턴이 배치되고, 이를 기준으로 좌우 대칭되도록 복수의 전극 패턴이 배치될 수 있다. The plurality of electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 of the
이와 같은 복수의 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)들은 일정 제스쳐 입력시 사용자의 착용 부위와 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)들 사이의 거리 변화에 따른 정전용량의 변화를 측정하여, 사용자의 제스쳐 입력을 정확하게 감지할 수 있다. The plurality of electrode patterns 131-1, 131-2, 131-3, 131-4, 131-5, and 131-6 may be formed on the wearer's body and the electrode patterns 131-1, 131- 2, 131 - 3, 131 - 4, 131 - 5, and 131 - 6 to measure a change in capacitance according to a change in distance between the user and the gesture input.
도 5를 참조하면, 도 5a와 같이 사용자의 주먹을 쥐었을 때, 손목의 일부 근육이 수축함에 따라서, 손목의 일부가 밴드(205)와 떨어질 수 있다. 그러므로 도 5b와 같이 제 3 내지 제 5 전극패턴(131-3, 131-4, 131-5,)은 손목과 멀어질 수 있다. 따라서, 도 5c와 같이 제 3 내지 제 5 전극패턴(131-3, 131-4, 131-5,)에서 손목과 커플링되는 정전용량이 작게 감지되어 주먹을 쥐는 제스처는 특정 정전용량 값을 가질 수 있다. 즉, 사용자가 주먹을 쥐는 제스처는 복수의 전극패턴에서 측정된 특정 정전용량 값에 대응되므로, 제스처 센서(130)는 이를 통해 사용자의 제스처를 감지할 수 있다. Referring to FIG. 5, when a user's fist is held as shown in FIG. 5A, as a part of the muscles of the wrist contract, a part of the wrist may fall off the
마찬가지로, 도 6을 보면, 도 6a와 같이 사용자가 주먹을 피면 손목의 근육이 팽창함에 따라서, 밴드(205)와 손목이 접촉 면적이 증가할 수 있다. 자세히, 도 6b를 보면, 밴드(205)는 손목 전체에 접촉된 것을 알 수 있다. 따라서, 도 6c를 보면, 제 1 내지 제 6 전극패턴(131-1, 131-2, 131-3, 131-4, 131-5, 131-6)에서 손목과 커플링되는 정전용량은 큰 값으로 감지되므로 주먹을 피는 제스처는 특정 정전용량 값을 가질 수 있다. 즉, 사용자가 주먹을 쥐는 제스처는 복수의 전극패턴에서 측정된 특정 정전용량 값에 대응되므로, 제스처 센서(130)는 이를 통해 사용자의 제스처를 감지할 수 있다. Similarly, referring to FIG. 6, when a user fists, as shown in FIG. 6A, as the muscles of the wrist expand, the contact area between the
전술한 설명에서는 제스쳐로 주먹을 쥐었다 피는 동작을 설명하였으나, 제스쳐 센서는 다른 여러 제스쳐를 인식할 수 있다. 예를 들어, 사용자가 주먹을 쥔 후 엄지를 피는 동작, 검지를 피는 동작, 중지를 피는 동작, 약지를 피는 동작 및 소지를 피는 동작 중 적어도 둘 이상을 제스쳐로 인식할 수 있다. In the foregoing description, the gesture sensor is capable of recognizing various other gestures, although it has described the operation of gripping the fist with the gesture. For example, at least two or more of the following operations can be recognized as a gesture: a motion of punching a thumb, a motion of bending the thumb, a motion of bending the index finger, a motion of pausing,
즉, 제스처 센서(130)는 사용자가 제스쳐를 취했을 때 착용부위와 밴드(205) 사이에 거리가 변화할 수 있는 다양한 제스쳐들은 모두 인식할 수 있다. That is, the
이를 통해, 사용자는 손가락 움직임을 통해 손쉽게 밴드(205)형 센서에 신호 입력이 가능하여, 와치 타입의 원격 제어장치(100)에 최적화된 인터페이스를 제공할 수 있다. Accordingly, the user can easily input a signal to the band-type sensor through the finger movement, thereby providing an interface optimized for the watch-type
센서 전극(131)은 자가 커패시턴스(self-capacitance) 방식 또는/및 상호 커패시턴스(mutual-capacitance) 방식을 이용하여 사용자의 착용 부위와 접촉 및 거리 정도에 따른 정전용량 변화를 감지할 수 있다. The
예를 들어, 센서 전극(131)은 자가 커패시턴스 방식을 통해 사용자의 제스쳐를 감지할 수 있다. 자가 커패시턴스 방식은 센싱 감도가 좋고 나아가 근접 센싱도 가능하므로, 착용부위와 센서 전극(131) 사이의 거리가 멀어도 사용자의 제스쳐를 정확하게 감지할 수 있는 장점이 있다. For example, the
센서 전극은(131) 인듐 주석 산화물(indium tin oxide), 인듐 아연 산화물(indium zinc oxide), 구리 산화물(copper oxide), 주석 산화물(tin oxide), 아연 산화물(zinc oxide), 티타늄 산화물(titanium oxide) 등의 금속 산화물을 포함할 수 있다.센서 전극(131)은 나노와이어, 감광성 나노와이어 필름, 탄소나노튜브(CNT), 그래핀(graphene), 전도성 폴리머 또는 이들의 혼합물을 포함할 수 있다. The sensor electrode may be made of at least one material selected from the group consisting of indium tin oxide (ITO), indium zinc oxide, copper oxide, tin oxide, zinc oxide, titanium oxide ), Etc. The
나노 와이어 또는 탄소나노튜브(CNT)와 같은 나노 합성체를 사용하는 경우 흑색으로 구성할 수 도 있으며, 나노 파우더의 함량제어를 통해 전기전도도를 확보 하면서 색과 반사율 제어가 가능한 장점이 있다.When nanocomposites such as nanowires or carbon nanotubes (CNTs) are used, they may be made of black. The color and reflectance can be controlled while securing the electric conductivity by controlling the content of the nano powder.
또한 이러한 센서 전극(131)은 전기가 흐르는 전도성 높은 물질을 포함할 수 있다. 예를 들어, 센서 전극(131)은 크롬(Cr), 니켈(Ni), 구리(Cu), 알루미늄(Al), 은(Ag), 몰리브덴(Mo) 및 이들의 합금 중 적어도 하나의 금속을 포함할 수 있다. 이때, 센서 전극(131)은 불투명하여도 무방하다. In addition, the
한편, 제스처 센서(130)는 센서 전극(131)을 전기적으로 연결하는 센서 배선 전극(133)들이 배치될 수 있다. The
센서 배선 전극(133)들은 복수 개로 구비될 수 있다. 즉, 센서 배선 전극(133)들은 센서 전극(131)의 일단에 연결되는 제 1 센서 배선 전극(133-1) 및 센서 전극(131)의 타단에 연결되는 제 2 센서 배선 전극(133-2)을 포함할 수 있다. A plurality of
이러한 센서 배선 전극(133)은 센서 전극(131)에서 감지된 정전용량 값을 인쇄회로기판(135)으로 전달하고, 인쇄회로기판(135)은 제어부(180)와 연결될 수 있다. The
제어부(180)는 센서 전극(131)에서 측정된 정전용량 값에 따라서 사용자의 제스처를 감지할 수 있다.
The
다음으로, 센서부는 사용자의 모션을 감지하는 모션 센서(141)를 더 포함할 수 있다. Next, the sensor unit may further include a
이러한 모션 센서(141)는 각기 다른 방식으로 사용자의 모션을 감지하는 적어도 둘 이상의 센서를 포함하여, 적어도 둘 이상 사용자의 모션을 감지할 수 있다. The
도 7은 본 발명의 실시예에 따른 모션 센서(141)를 설명하기 위한 도면이다. 7 is a view for explaining a
자세히, 도 7을 참조하면, 모션 센서(141)는 가속도 센서(acceleration sensor), 자이로스코프 센서(gyroscope sensor) 및 중력 센서(geomagnetic sensor)를 포함할 수 있다. 7, the
먼저, 가속도 센서는 도 7(a)와 같이 원격 제어장치(100)가 공간에서 특정 방향으로 이동하는 가속량을 측정할 수 있다. 예를 들어, 가속도 센서는 사용자가 손목을 상하좌우전후 방향으로 이동시키는 제 1 모션을 감지할 수 있다. First, the acceleration sensor can measure the amount of acceleration in which the
그리고 자이로스코프 센서는 도 7(b)와 같이 원격 제어장치(100)가 수평면에서 기울어진 정도를 측정할 수 있다. 예를 들어, 자이로스코프 센서는 사용자가 원격 제어장치(100)를 여러 방향으로 기울이는 제 2 모션을 감지할 수 있다. 7 (b), the gyroscope sensor can measure the degree of tilting of the
이때, 도 7(c)와 같은 중력 센서는 가속도 센서와 자이로스코프 센서의 모션 감지를 보완할 수 있다. At this time, the gravity sensor as shown in FIG. 7 (c) can complement the motion detection of the acceleration sensor and the gyroscope sensor.
즉, 센서부의 모션 센서(141)는 사용자가 원격 제어장치(100)를 착용한 상태에서 취하는 다양한 모션들을 방식을 구분하여 감지할 수 있다. That is, the
그 밖에, 센서부는 기타 센서(142)로 근접센서(proximity sensor), 조도 센서(illumination sensor), 터치 센서(touch sensor), 자기 센서(magnetic sensor), RGB 센서, 적외선 센서(IR 센서: infrared sensor), 지문인식 센서(finger scan sensor), 초음파 센서(ultrasonic sensor), 광 센서(optical sensor, 배터리 게이지(battery gauge), 환경 센서(예를 들어, 기압계, 습도계, 온도계, 방사능 감지 센서, 열 감지 센서, 가스 감지 센서 등), 화학 센서(예를 들어, 전자 코, 헬스케어 센서, 생체 인식 센서 등) 중 적어도 하나를 포함할 수 있다. 한편, 본 명세서에 개시된 원격 제어장치(100)는, 이러한 센서들 중 적어도 둘 이상의 센서에서 센싱되는 정보들을 조합하여 제스처 감지나 모션 감지 정밀도를 더욱 향상시킬 수 있다.
In addition, the sensor unit may include a proximity sensor, an illumination sensor, a touch sensor, a magnetic sensor, an RGB sensor, an infrared sensor (IR sensor) ), A finger scan sensor, an ultrasonic sensor, an optical sensor, a battery gauge, an environmental sensor (for example, a barometer, a hygrometer, a thermometer, The
출력부(150)는 시각, 청각 또는 촉각 등과 관련된 출력을 발생시키기 위한 것으로, 디스플레이부(151), 음향 출력부(152), 햅팁 모듈(153), 광 출력부(154) 중 적어도 하나를 포함할 수 있다. 디스플레이부(151)는 터치 센서와 상호 레이어 구조를 이루거나 일체형으로 형성됨으로써, 터치 스크린을 구현할 수 있다. 이러한 터치 스크린은, 원격 제어장치(100)와 사용자 사이의 입력 인터페이스를 제공하는 사용자 입력부(123)로써 기능함과 동시에, 원격 제어장치(100)와 사용자 사이의 출력 인터페이스를 제공할 수 있다.The
도 8은 본 발명의 실시예에 따른 디스플레이부(151)의 화면을 나타낸다. 8 shows a screen of the
사용자는 출력부를 통해 제스처 감지 상태, 모션 감지 상태를 인식할 수 있다. 자세히, 도 8과 같이 출력부는 제스처나 모션 입력시 햅틱, 음향 또는 디스플레이 출력을 제공할 수 있다.
The user can recognize the gesture detection state and the motion detection state through the output unit. In detail, as shown in FIG. 8, the output unit can provide a haptic, sound, or display output in gesture or motion input.
인터페이스부(160)는 원격 제어장치(100)에 연결되는 다양한 종류의 외부 기기와의 통로 역할을 수행한다. 이러한 인터페이스부(160)는, 유/무선 헤드셋 포트(port), 외부 충전기 포트(port), 유/무선 데이터 포트(port), 메모리 카드(memory card) 포트, 식별 모듈이 구비된 장치를 연결하는 포트(port), 오디오 I/O(Input/Output) 포트(port), 비디오 I/O(Input/Output) 포트(port), 이어폰 포트(port) 중 적어도 하나를 포함할 수 있다. 원격 제어장치(100)에서는, 인터페이스부(160)를 통해 외부 기기가 직접 연결될 때에도, 적절할 제어를 수행할 수 있다.
The
또한, 메모리(170)는 원격 제어장치(100)의 다양한 기능을 지원하는 데이터를 저장한다. 메모리(170)는 원격 제어장치(100)에서 구동되는 다수의 응용 프로그램(application program 또는 애플리케이션(application)), 원격 제어장치(100)의 동작을 위한 데이터들, 명령어들을 저장할 수 있다. 이러한 응용 프로그램 중 적어도 일부는, 무선 통신을 통해 외부 서버로부터 다운로드 될 수 있다. 또한 이러한 응용 프로그램 중 적어도 일부는, 원격 제어장치(100)의 기본적인 기능을 위하여 출고 당시부터 원격 제어장치(100)상에 존재할 수 있다. 한편, 응용 프로그램은, 메모리(170)에 저장되고, 원격 제어장치(100) 상에 설치되어, 제어부(180)에 의하여 원격 제어장치(100)의 동작(또는 기능)을 수행하도록 구동될 수 있다.
In addition, the
제어부(180)는 응용 프로그램과 관련된 동작 외에도, 통상적으로 원격 제어장치(100)의 전반적인 동작을 제어한다. 제어부(180)는 위에서 살펴본 구성요소들을 통해 입력 또는 출력되는 신호, 데이터, 정보 등을 처리하거나 메모리(170)에 저장된 응용 프로그램을 구동함으로써, 사용자에게 적절한 정보 또는 기능을 제공 또는 처리할 수 있다.In addition to the operations associated with the application program, the
또한, 제어부(180)는 메모리(170)에 저장된 응용 프로그램을 구동하기 위하여, 도 1과 함께 살펴본 구성요소들 중 적어도 일부를 제어할 수 있다. 나아가, 제어부(180)는 응용 프로그램의 구동을 위하여, 원격 제어장치(100)에 포함된 구성요소들 중 적어도 둘 이상을 서로 조합하여 동작시킬 수 있다.In addition, the
전원공급부(190)는 제어부(180)의 제어 하에서, 외부의 전원, 내부의 전원을 인가 받아 원격 제어장치(100)에 포함된 각 구성요소들에 전원을 공급한다. 이러한 전원공급부(190)는 배터리를 포함하며, 배터리는 내장형 배터리 또는 교체가능한 형태의 배터리가 될 수 있다.The
각 구성요소들 중 적어도 일부는, 이하에서 설명되는 다양한 실시 예들에 따른 원격 제어장치(100)의 동작, 제어, 또는 제어방법을 구현하기 위하여 서로 협력하여 동작할 수 있다. 또한, 원격 제어장치(100)의 동작, 제어, 또는 제어방법은 메모리(170)에 저장된 적어도 하나의 응용 프로그램의 구동에 의하여 원격 제어장치(100) 상에서 구현될 수 있다. At least some of the components may operate in cooperation with one another to implement the operation, control, or control method of the
이하에서는, 위에서 살펴본 원격 제어장치(100)를 통하여 구현되는 원격 제어방법을 좀더 상세히 설명한다. Hereinafter, a remote control method implemented through the
도 9는 본 발명의 실시예에 따른, 원격 제어 인터페이스를 제공하는 방법을 설명한다. Figure 9 illustrates a method for providing a remote control interface, in accordance with an embodiment of the present invention.
도 9를 참조하면, 제어부(180)는 제스처 센서(130)로부터 사용자 제스처 입력을 감지할 수 있다. (S101)Referring to FIG. 9, the
자세히, 원격 제어장치(100)가 활성화 되고, 사용자가 특정 제스처를 취할 경우, 제스처 센서(130)는 특정 제스처에 따른 정전용량 변화 값을 측정하고, 그 값을 제어부(180)로 전달할 수 있다. In detail, when the
이때, 사용자의 제스처는 몸짓을 취한 상태를 유지할 수 있는 제스처일 수 있다. At this time, the user's gesture may be a gesture capable of maintaining the gesture state.
예를 들어, 사용자가 주먹을 쥐는 제 1 제스처를 취할 경우, 제 1 제스처에서 센서 전극(131)에서 발생된 정전용량 값이 제어부(180)로 전달될 수 있다. 또는, 사용자가 주먹을 피는 제 2 제스처를 취할 경우, 제 2 제스처에서 센서 전극(131)에서 발생된 정전용량 값이 제어부(180)로 전달될 수 있다. For example, when a user takes a first gesture to hold a fist, the capacitance value generated by the
이후, 제어부(180)는 제스처 센서(130)에서 전달된 정전용량 값을 통해 사용자가 취하고 있는 제스처 상태를 판단할 수 있다. (S103)Then, the
자세히, 제어부(180)는 제스처 센서(130)에서 전달된 정전용량 값을 메모리에 저장된 특정 제스처에 따른 정전용량 값과 비교하여, 전달된 정전용량 값에 대응되는 제스처를 산출함으로써, 제스처를 판단할 수 있다. In detail, the
좀더 자세히, 메모리에는 특정 제스처에 따른 정전용량 값이 프로파일로 저장되고, 제어부(180)는 감지된 정전용량 값과 메모리의 프로파일 값을 비교하여 가장 근접한 프로파일을 검출하고, 검출된 프로파일에 대응되는 제스처를 사용자가 입력한 것으로 판단할 수 있다. More specifically, a capacitance value according to a specific gesture is stored as a profile in the memory, and the
이때, 제어부(180)는 사용자 제스처 입력에 따른 정전용량 값을 메모리의 프로파일에 지속적으로 업데이트 함으로써, 제스처 판단에 정확도를 향상시킬 수 있다. At this time, the
제어부(180)는 제스처 입력 상태에 따라 원격 실행 신호를 생성할 수 있다. 즉, 제어부(180)는 제스처 입력에 매칭되는 원격 실행 신호를 생성하고, 외부 기기에 전송하는 원격 제어 인터페이스를 제공할 수 있다. The
또한, 제어부(180)는 제스처 입력 상태에 따라 각기 다른 제어 모드를 제공할 수도 있다. 즉, 제스처 입력에 따른 원격 실행 신호는 제어 모드 선택 실행 신호일 수 있다. In addition, the
자세히, 제어부(180)는 사용자가 취하고 있는 제스처에서 각기 다른 제어 모드를 제공하고, 각기 다른 제어 모드에서 사용자의 추가적인 입력을 받아 제어 신호를 생성할 수 있다. 좀더 자세히, 제어 모드에 따라 제어부(180)가 사용자의 입력에 매칭시키는 실행 신호가 변경될 수 있다. In detail, the
예를 들어, 제어 모드에 따라서 사용자의 모션은 각기 다른 실행 신호로 생성될 수 있다. For example, depending on the control mode, the user's motion can be generated with different execution signals.
제어부(180)는 제 1 제스처를 감지하면, 제 1 제어 모드로 진입할 수 있다. (S105) When the
자세히, 제어부(180)는 제 1 제스처 감지하면, 제 1 제어 모드에서 사용자의 모션에 따른 실행 입력을 생성할 수 있다. In detail, when the first gesture is detected, the
예를 들어, 제어부(180)는 주먹을 쥐고 있는 제스처 감지시, 제 1 제어 모드에서 사용자의 입력에 따른 실행 신호를 생성할 수 있다. For example, the
자세히, 제어부(180)는 제 1 제어 모드에 진입한 후 사용자의 모션 입력을 감지할 수 있다. (S107)In detail, the
예를 들어, 제어부(180)는 모션 센서(141)를 통해 사용자가 주먹을 쥐고 있는 제스처 입력 상태에서 주먹을 뻗거나 당겨 전후좌우상하 방향으로 원격 제어장치(100)를 이동시키는 제 1 모션을 감지할 수 있다. For example, the
또한, 제어부(180)는 모션 센서(141)를 통해 사용자가 주먹을 쥐고 있는 제스처 입력 상태에서, 손목을 기울여 원격 제어장치(100)의 기울기를 변화시키는 제 2 모션을 감지할 수 있다. In addition, the
한편, 제어부(180)는 제스처 입력과 모션 입력을 별개로 원격 실행 신호를 생성할 수도 있다. 이러한 경우, 모션 입력은 제어 모드와 관계없이 매칭되는 원격 실행 신호를 생성할 수 있다. Meanwhile, the
그리고 제어부(180)는 제 1 제어 모드에서 모션 입력에 따른 원격 실행 신호를 생성할 수 있다. (S109)The
자세히, 제어부(180)는 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성할 수 있다. In detail, the
또한, 제어부(180)는 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성할 수 있다. In addition, the
그리고 제 1 원격 실행 신호와 제 2 원격 실행 신호는 외부 기기에서 각기 다른 특성을 제어할 수 있다. And the first remote execution signal and the second remote execution signal can control different characteristics in the external device.
그리고 이와 같이 생성된 원격 실행 신호는 통신부를 통해 외부 기기로 전송될 수 있다. (S117)The remote execution signal thus generated can be transmitted to an external device through the communication unit. (S117)
자세히, 제어부(180)는 원격 실행 신호를 생성하고 통신부를 통해 생성된 신호를 외부 기기로 전송함으로써, 외부 기기를 원격 제어할 수 있다. 예를 들어, 제어부(180)는 근거리 통신 모듈로 블루투스 통신 방식을 통해 생성된 원격 실행 신호를 외부 기기로 전달할 수 있다. In detail, the
이때, 제어부(180)는 통신부를 통해 실행 입력에 따른 피드백을 외부 기기로부터 수신할 수 있다. At this time, the
이러한 피드백은 출력부를 통해 출력되어 사용자는 제스처나 모션에 따른 외부 기기에 제어 내용을 인지할 수 있다. This feedback is outputted through the output unit so that the user can recognize the control contents to the external device according to the gesture or motion.
한편, 제어부(180)는 제 2 제스처를 감지하면, 제 2 제어 모드로 진입할 수 있다. (S111) On the other hand, when the
자세히, 제어부(180)는 제 2 제스처 감지하면, 제 2 제어 모드에서 사용자의 입력에 따른 실행 신호를 생성할 수 있다. When the second gesture is detected, the
예를 들어, 제어부(180)는 주먹을 쥐고 있는 제스처 감지시, 제 2 제어 모드에서 사용자의 모션 입력에 따른 실행 신호를 생성할 수 있다. For example, the
자세히, 제어부(180)는 제 2 제어 모드에 진입한 후 사용자의 모션 입력을 감지할 수 있다. (S113)In detail, the
예를 들어, 제어부(180)는 모션 센서(141)를 통해 사용자가 주먹을 피고 있는 제스처 입력 상태에서 손을 뻗거나 당김으로써 원격 제어장치(100)를 이동시키는 제 1 모션을 감지할 수 있다. For example, the
또한, 제어부(180)는 모션 센서(141)를 통해 사용자가 주먹을 피고 있는 제스처 입력 상태에서, 손목을 기울여 원격 제어장치(100)의 기울기를 변화시키는 제 2 모션을 감지할 수 있다. In addition, the
그리고 제어부(180)는 제 2 제어 모드에서 모션 입력에 따른 원격 실행 신호를 생성할 수 있다. (S115)The
자세히, 제어부(180)는 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성할 수 있다. In detail, the
또한, 제어부(180)는 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성할 수 있다. In addition, the
그리고 제 1 내지 제 4 원격 실행 신호는 외부 기기에서 각기 다른 특성을 제어할 수 있다. And the first to fourth remote execution signals can control different characteristics in the external device.
한편, 실시예에서, 제어부(180)는 제스처로 제어 모드를 설정한 후 모션으로 실행 신호를 생성하는 것으로 설명하였으나, 이와 반대로 모션으로 제어 모드를 설정한 후 실행 신호를 생성하는 것도 가능하다. Meanwhile, in the embodiment, the
또한, 제어부(180)는 선후 관계없이 제스처에 대하여 실행 신호를 생성하고, 모션에 대하여 실행 신호를 생성함으로써, 사용자는 모션과 제스처 입력으로 각각의 원격 제어 신호를 생성할 수도 있다. In addition, the
또한, 제어부(180)는 제스처 입력과 모션 입력을 조합하여 원격 실행 신호를 생성할 수도 있고, 제스처 입력에 대한 별도의 실행 신호와 모션 입력에 대한 별도의 실행 신호를 생성하여 원격 제어 신호를 생성하는 것도 당연히 가능할 것이다. The
자세히, 제어부(180)는 원격 제어 기기 특성을 반영하여 제스처 입력에 따른 실행 신호와, 모션 입력에 따른 실행 신호와, 제스처와 모션 입력에 따른 실행 신호를 효과적으로 조합함으로써, 원격 제어 기기 특성에 적합한 사용자 인터페이스를 제공할 수 있다. 구체적인 사용자 인터페이스는 후술하기로 한다. In detail, the
실시예로 돌아와, 이와 같이 생성된 원격 실행 신호는 통신부를 통해 외부 기기로 전송될 수 있다. (S117)Returning to the embodiment, the remote execution signal thus generated can be transmitted to an external device through the communication unit. (S117)
자세히, 제어부(180)는 원격 실행 신호를 생성하고 통신부를 통해 생성된 신호를 외부 기기로 전송함으로써, 외부 기기를 원격 제어할 수 있다. 예를 들어, 제어부(180)는 근거리 통신 모듈로 블루투스 통신 방식을 통해 생성된 원격 실행 신호를 외부 기기로 전달할 수 있다. In detail, the
이때, 제어부(180)는 통신부를 통해 실행 입력에 따른 피드백을 외부 기기로부터 수신할 수 있다. At this time, the
이러한 실시예에 따른 제어부(180)는 사용자의 제스처와 모션을 구분하여 적어도 2 단계로 실행 신호 생성하는 제어 모드를 제공함으로써, 단순한 제스처와 모션으로 많은 실행 신호를 생성할 수 있다. The
그리고 이러한 제스처와 모션은 사용자가 원격 제어장치(100)를 착용한 상태에서 손쉽게 입력이 가능한 방법으고 사용자는 직관적으로 제스처와 모션 입력에 따른 동작을 인지할 수 있으므로, 웨어러블 원격 제어장치(100)에 적합한 효과적인 사용자 인터페이스를 제공할 수 있다.
The gesture and motion can be easily input when the user wears the
이하, 이러한 원격 제어방법을 통해 외부 기기를 제어하는 구체적인 일 례들을 설명한다. Hereinafter, specific examples of controlling an external device through the remote control method will be described.
도 10은 본 발명의 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다. 도 11은 본 발명의 실시예에 따른 제스처에 따른 원격 제어를 설명하기 위한 도면이다. 도 12는 본 발명의 실시예에 따른 제 2 모션에 따른 원격 제어를 설명하기 위한 도면이다. 도 13은 본 발명의 실시예에 따른 제 1 모션에 따른 원격 제어를 설명하기 위한 도면이다. 도 14는 본 발명의 다른 실시예에 따른 원격 제어를 설명하기 위한 도면이다. 10 is a block diagram showing an example of a remote control system according to an embodiment of the present invention. 11 is a view for explaining a remote control according to a gesture according to an embodiment of the present invention. 12 is a view for explaining remote control according to the second motion according to the embodiment of the present invention. 13 is a view for explaining remote control according to the first motion according to the embodiment of the present invention. 14 is a diagram for explaining a remote control according to another embodiment of the present invention.
먼저, 도 10 내지 도 14를 참조하여 와치 타입 원격 제어장치(100)로 외부 기기인 드론을 제어하는 구체적인 원격 제어방법을 설명한다. 10 to 14, a specific remote control method for controlling the drone as an external device with the watch-type
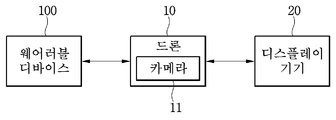
도 10을 보면, 드론을 제어하는 원격 제어시스템은원격 제어장치(100), 카메라(11)를 포함하는 드론(10) 및 카메라(11)에서 촬영된 영상을 표시할 수 있는 디스플레이 기기를 포함한다. 이때, 원격 제어장치(100) 또한 카메라(11)에서 촬영된 영상을 표시할 수 있으나, 실시예에서는 별도의 디스플레이 기기로 영상을 표시하는 것으로 설명한다. 10, the remote control system for controlling the dron includes a
외부 기기 중 드론(10)을 제어하기 위해서 수많은 제어 입력이 필요할 수 있다. 예를 들어, 드론(10)을 상승시키거나 하강시키는 입력, 드론(10)의 이동 방향(가속 방향)을 정하는 입력, 드론(10)의 기울기를 제어하는 입력, 드론(10)에 포함된 기타 기기들(예컨대, 카메라(11) 촬영 방향)을 제어하는 입력 등이 필요할 수 있다. A number of control inputs may be required to control the
실시예에 따른 원격 제어시스템은 이러한 특성을 갖는 드론(10)에 특화된 웨어러블 디바이스를 이용한 사용자 인터페이스를 제공할 수 있다. The remote control system according to the embodiment can provide a user interface using a wearable device specialized for the
도 11을 참조하면, 원격 제어장치(100)는 사용자의 제스처 입력에 따라서 드론(10)을 상승시키거나 하강시키는 원격 실행신호를 생성하고 전송하여, 드론(10)의 상하 이동을 제어할 수 있다. 11, the
자세히, 원격 제어장치(100)는 제스처 센서(130)를 통해 제 1 제스처 또는 제 2 제스처를 감지할 수 있다. In detail, the
그리고 원격 제어장치(100)는 제 1 제스처에서 제 1 제어 모드로 진입할 수 있고, 이때, 제 1 제어 모드를 드론(10)을 상승시키는 상태에서의 제어 모드일 수 있다. 이때, 원격 제어장치(100)는 제 1 제어 모드에 따른 실행 입력을 먼저 드론(10)에 송신할 수 있다. Then, the
반대로, 원격 제어장치(100)는 제 2 제스처에서 제 2 제어 모드로 진입할 수 있고, 이때, 제 2 제어 모드는 드론(10)을 하강시키는 상태에서의 제어 모드일 수 있다. 이때, 원격 제어장치(100)는 제 2 제어 모드에 따른 실행 입력을 먼저 드론(10)에 송신할 수 있다. Conversely, the
원격 제어장치(100)는 제어 모드에 따라 모션을 감지하여 원격 실행 신호를 생성하고 송신하여 드론(10)을 제어할 수 있다. The
자세히, 원격 제어장치(100)는 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성할 수 있고, 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성할 수 있다. In detail, the
또한, 원격 제어장치(100)는 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성할 수 있고, 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성할 수 있다. Further, the
그리고 제 1 내지 제 4 원격 실행 신호는 드론(10)에서 각기 다른 특성을 제어할 수 있다. And the first to fourth remote signals may control different characteristics in the
자세히, 도 12를 참조하면, 원격 제어장치(100)는 주먹을 핀 상태에서 손목을 기울여 원격 제어장치(100)의 기울기를 변경하는 모션을 감지하면, 드론(10)이 상승하는 상태에서 드론(10)의 기울기를 제어하는 실행 입력을 생성할 수 있다. 12, when the
반대로, 원격 제어장치(100)는 주먹을 쥔 상태에서 손목을 기울여 원격 제어장치(100)의 기울기를 변경하는 모션을 감지하면, 드론(10)이 하강하는 상태에서 드론(10)의 기울기를 제어하는 실행 입력을 생성할 수 있다. On the contrary, when the
또한, 도 13을 참조하면, 원격 제어장치(100)는 주먹을 핀 상태에서 손을 뻗거나 당겨 원격 제어장치(100)를 특정 방향으로 이동시키는 모션을 감지하면, 드론(10)이 상승하는 상태에서 특정 방향 측으로 가속하는 실행 입력을 생성할 수 있다. 13, when the
반대로, 원격 제어장치(100)는 주먹을 쥔 상태에서 손을 뻗거나 당겨 원격 제어장치(100)를 특정 방향으로 이동시키는 모션을 감지하면, 드론(10)이 하강하는 상태에서 특정 방향 측으로 가속하는 실행 입력을 생성할 수 있다. On the other hand, when the
이러한 방법을 통해, 실시예에 따른 원격 제어장치(100)는 드론(10)의 다양한 이동 특성을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공할 수 있다.
In this way, the
한편, 다른 실시예에서 제어 모드는 드론(10)의 각기 다른 모듈을 제어하는 제어 모드일 수 있다. On the other hand, in another embodiment, the control mode may be a control mode for controlling the different modules of the
자세히, 도 14를 참조하면, 원격 제어장치(100)는 제 1 제스처 상태를 감지하면 제 1 제어 모드로 드론(10)의 이동 특성을 제어할 수 있다. 예를 들어, 원격 제어장치(100)는 손을 핀 상태에서 다양한 모션을 감지하면 드론(10)의 이동을 제어하는 실행 입력을 생성하고 전송할 수 있다. Referring to FIG. 14, when the
또한, 원격 제어장치(100)는 제 2 제스처 상태를 감지하면 제 2 제어 모드로 드론(10)의 카메라(11)를 제어할 수 있다. 예를 들어, 원격 제어장치(100)는 주먹을 쥔 상태에서 다양한 모션을 감지하면, 드론(10)의 카메라(11) 촬영 방향, 초점 등을 제어하는 실행 입력을 생성하고 전송할 수 있다. Further, when the
이러한 방법을 통해, 다른 실시예에 따른 원격 제어장치(100)는 드론(10)의 다양한 모듈들을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공할 수 있다.
In this way, the
이와 같이 전술한 실시예에 따른 원격 제어시스템은 사용자가 웨어러블 디바이스를 보지 않은 상태에서도 제스처와 모션을 입력할 수 있다. 따라서, 사용자는 드론(10)을 관찰하거나 디스플레이 기기를 보면서 웨어러블 디바이스를 통해 드론(10) 제어를 손쉽게 입력 가능하다. 즉, 실시예에 따른 원격 제어시스템은 제어하려는 외부 기기의 특성에 맞는 직관적인 사용자 인터페이스를 제공할 수 있는 장점이 있다.
Thus, the remote control system according to the above-described embodiment can input the gesture and motion even when the user does not see the wearable device. Thus, the user can easily enter the control of the
도 15는 본 발명의 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다. 도 16은 본 발명의 다른 실시예에 따른 제 1 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다. 도 17은 본 발명의 다른 실시예에 따른 제 2 제어 모드에서 모션에 따른 원격 제어를 설명하기 위한 도면이다.15 is a block diagram showing an example of a remote control system according to another embodiment of the present invention. 16 is a diagram for explaining remote control according to motion in a first control mode according to another embodiment of the present invention. 17 is a view for explaining remote control according to motion in a second control mode according to another embodiment of the present invention.
먼저, 도 15 내지 도 17을 참조하여 와치 타입 원격 제어장치(100)로 외부 기기인 디스플레이 장치(30)(예컨대, 스마트 티비(30))를 제어하는 구체적인 원격 제어방법을 설명한다. 15 to 17, a concrete remote control method of controlling the display device 30 (e.g., the smart TV 30) as an external device with the watch-type
도 15를 보면, 스마트 티비(30)를 제어하는 원격 제어시스템은 원격 제어장치(100) 및 디스플레이 장치(30)를 포함한다. 15, a remote control system for controlling the
외부 기기 중 스마트 티비(30)를 제어하기 수많은 제어 입력이 필요할 수 있다. 예를 들어, 스마트 티비(30)에서 채널을 변경하는 입력, 음향을 변경하는 입력, 플레이 영상 선택 등을 제어하는 입력 등이 필요할 수 있다. A number of control inputs may be required to control the
다른 실시예에 따른 원격 제어시스템은 이러한 특성을 갖는 스마트 티비(30)에 특화된 웨어러블 디바이스를 이용한 사용자 인터페이스를 제공할 수 있다. The remote control system according to another embodiment can provide a user interface using a wearable device specialized for the
도 16 및 17을 참조하면, 원격 제어장치(100)는 사용자의 제스처 입력에 따라서 제어하려는 스마트 티비(30)의 특성을 선택할 수 있다. Referring to FIGS. 16 and 17, the
자세히, 원격 제어장치(100)는 제스처 센서를 통해 제 1 제스처 또는 제 2 제스처를 감지할 수 있다. In detail, the
그리고 원격 제어장치(100)는 제 1 제스처에서 스마트 티비(30)의 제 1 특성을 제어하는 제 1 제어 모드로 진입할 수 있고, 이때, 제 1 제어 모드를 스마트 티비(30)의 채널을 선택하는 제어 모드일 수 있다. Then, the
반대로, 원격 제어장치(100)는 제 2 제스처에서 제 2 제어 모드로 진입할 수 있고, 이때, 제 2 제어 모드는 스마트 티비(30)의 음향을 제어하는 모드일 수 있다. Conversely, the
원격 제어장치(100)는 제어 모드에 따라 모션을 감지하여 원격 실행 신호를 생성하고 송신하여 스마트 티비(30)를 제어할 수 있다. The
자세히, 원격 제어장치(100)는 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성할 수 있고, 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성할 수 있다. In detail, the
도 16을 참조하면, 원격 제어장치(100)는 손을 핀 상태에서 손을 좌측으로 이동시키는 모션 감지시 채널 번호를 낮추는 원격 실행 신호를 생성하고 스마트 티비(30)에 전송할 수 있다. Referring to FIG. 16, the
반대로, 원격 제어장치(100)는 손을 핀 상태에서 손을 우측으로 이동시키는 모션 감지시 채널 번호를 높이는 원격 실행 신호를 생성하고 스마트 티비(30)에 전송할 수 잇다. On the contrary, the
또한, 원격 제어장치(100)는 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성할 수 있고, 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성할 수 있다. Further, the
도 17을 참조하면, 원격 제어장치(100)는 손을 쥔 상태에서 손을 상측으로 이동시키는 모션 감지시 음향을 키우는 원격 실행 신호를 생성하고 스마트 티비(30)에 전송할 수 있다. Referring to FIG. 17, the
반대로, 원격 제어장치(100)는 손을 쥔 상태에서 손을 아래 측으로 이동시키는 모션 감지시 음향을 낮추는 원격 실행 신호를 생성하고 스마트 티비(30)에 전송할 수 잇다. On the contrary, the
이러한 방법을 통해, 실시예에 따른 원격 제어장치(100)는 스마트 티비(30)의 다양한 특성을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공할 수 있다.
In this way, the
도 18은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다. 도 19 내지 22는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다. 18 is a block diagram showing an example of a remote control system according to another embodiment of the present invention. 19 to 22 are views showing a state in which remote control is performed according to another embodiment of the present invention.
먼저, 도 18 내지 22를 참조하여, 와치 타입 원격 제어장치(100)로 외부 기기인 차량(40)(또는, 차량(40) 내 보조장치)를 제어하는 구체적인 원격 제어방법을 설명한다. 18 to 22, a specific remote control method of controlling the vehicle 40 (or an auxiliary device in the vehicle 40), which is an external device, with the watch-type
도 18를 보면, 원격 제어시스템은 웨어러블 디바이스는 원격 제어장치(100) 및 차량(40)을 포함한다. Referring to Fig. 18, the remote control system includes a
외부 기기 중 차량(40)을 제어하기 수많은 제어 입력이 필요할 수 있다. 예를 들어, 차량(40)의 주행을 위한 운전 조작 입력, 차량(40)의 기타 장치들을 조작하기 위한 입력 등이 필요하다. Numerous control inputs may be required to control the
또 다른 실시예에 따른 원격 제어시스템은 이러한 특성을 갖는 차량(40)에 특화된 원격 제어장치(100)를 이용한 사용자 인터페이스를 제공할 수 있다. The remote control system according to another embodiment may provide a user interface using the
도 19 및 20을 참조하면, 원격 제어장치(100)는 사용자의 제스처 입력에 따라서 제어하려는 차량(40)의 특성을 선택할 수 있다. 19 and 20, the
자세히, 원격 제어장치(100)는 제스처 센서를 통해 제 1 제스처 또는 제 2 제스처를 감지할 수 있다. In detail, the
그리고 원격 제어장치(100)는 제 1 제스처 감지시 차량(40)의 제 1 특성을 제어하는 제 1 제어 모드로 진입할 수 있다. 예를 들어, 제 1 제어 모드는 차량(40)의 오디오 출력을 제어하는 모드일 수 있다. And the
반대로, 원격 제어장치(100)는 제 2 제스처에서 제 2 제어 모드로 진입할 수 있다. 예를 들어, 제 2 제어 모드는 차량(40)의 공조 장치를 제어하는 모드일 수 있다. Conversely, the
원격 제어장치(100)는 제어 모드에 따라 모션을 감지하여 원격 실행 신호를 생성하고 송신하여 차량(40)을 제어할 수 있다. The
자세히, 원격 제어장치(100)는 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성할 수 있고, 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성할 수 있다. In detail, the
도 19를 참조하면, 원격 제어장치(100)는 손을 쥔 상태에서 손을 상하로 이동시키는 입력을 통해 오디오의 출력을 높이거나 낮추는 원격 실행 신호를 생성하고, 차량(40)의 오디오 출력장치에 전송할 수 있다. 19, the
또한, 원격 제어장치(100)는 손을 쥔 상태에서 손을 좌우로 이동시키는 모션 감지시 출력할 파일(또는, 주파수)을 선택하는 원격 실행 신호를 생성하고, 오디오 출력장치에 전송할 수 있다. Also, the
또한, 원격 제어장치(100)는 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성할 수 있고, 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성할 수 있다. Further, the
도 20을 참조하면, 원격 제어장치(100)는 손을 핀 상태에서 손을 상하로 이동시키는 모션 감지시 차량(40)의 공조장치의 온도를 설정하는 원격 실행 신호를 생성하고 공조장치에 전송할 수 있다. 20, the
또한, 원격 제어장치(100)는 손을 핀 상태에서 손을 좌우로 이동시키는 모션 감지시 공조장치의 바람 세기를 설정하는 원격 실행 신호를 생성하고 공조장치에 전송할 수 있다. Also, the
이러한 방법을 통해, 실시예에 따른 원격 제어장치(100)는 차량(40)의 다양한 특성을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공하여, 사용자의 편의를 증진시키고 운전 주의를 유지시켜 안전 주행을 도모할 수 있다.
In this way, the
한편, 원격 제어장치(100)가 핸들을 제어하는 손에 배치되었을 때, 원격 제어장치(100)의 원격 제어방법을 설명한다. On the other hand, a remote control method of the
도 21 내지 22를 참조하면, 원격 제어장치가 핸들을 제어하는 손에 배치되면, 일반적으로 사용자는 핸들을 손으로 쥔 상태인 제 1 제스처와, 손을 피고 핸들에 대는 제 2 제스처를 취할 수 있다.21-22, when the remote control is placed in the hand controlling the handle, the user can generally take a first gesture with the hand gripped and a second gesture with the hand gripped against the handle .
도 21과 같이, 원격 제어장치(100)는 핸들을 손으로 쥔 상태인 제 1 제스처를 감지하면, 운전자가 일반 주행하고 있는 상태로 핸들을 세밀하게 제어하려는 상태로 보고, 핸들의 스티어링 레벨을 증가시키는 원격 실행 신호를 차량(40)에 전송할 수 있다. As shown in FIG. 21, when the
또한, 도 22와 같이 원격 제어장치(100)는 손으로 피고 핸들에 댄 제 2 제스처를 감지하면, 운전자가 주차와 같이 핸들에 많은 조작력을 가하는 제어를 하려는 상태로 보고, 핸들의 스티어링 레벨을 감소시키는 원격 실행 입력을 차량(40)에 전송할 수 있다. 22, when the
이러한 방법을 통해, 실시예에 따른 원격 제어장치(100)는 차량(40)의 조향 특성을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공할 수 있다.
In this way, the
도 23은 본 발명의 또 다른 실시예에 따른 원격 제어시스템의 일 례를 나타내는 블록도이다. 도 24 내지 25는 본 발명의 또 다른 실시예에 따라 원격 제어를 수행하는 모습을 나타내는 도면들이다. 23 is a block diagram showing an example of a remote control system according to another embodiment of the present invention. 24 to 25 are views showing a state in which remote control is performed according to another embodiment of the present invention.
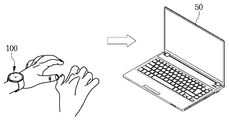
먼저, 도 23 내지 25를 참조하여, 와치 타입 원격 제어장치(100)로 외부 기기인 노트북(50)을 제어하는 구체적인 원격 제어방법을 설명한다. 여기서, 노트북(50)은 일반 컴퓨터, 태블릿 등을 포함하는 것으로 이해할 수 있다. 23 to 25, a concrete remote control method for controlling the
도 23을 보면, 원격 제어시스템은 격 제어장치(100) 및 노트북(50)을 포함한다. 23, the remote control system includes the
외부 기기 중 노트북(50)을 제어하기 수많은 제어 입력이 필요할 수 있다. 예를 들어, 노트북(50)의 키보드 입력, 노트북(50)의 마우스 입력, 버튼 입력 등이 있다.A large number of control inputs may be required to control the
또 다른 실시예에 따른 원격 제어시스템은 이러한 특성을 갖는 노트북(50)에 특화된 원격 제어장치(100)를 이용한 사용자 인터페이스를 제공할 수 있다. The remote control system according to another embodiment may provide a user interface using the
원격 제어장치(100)는 사용자의 제스처 입력에 따라서 제어하려는 노트북(50)의 특성을 선택할 수 있다. The
자세히, 원격 제어장치(100)는 제스처 센서를 통해 제 1 제스처 또는 제 2 제스처를 감지할 수 있다. In detail, the
도 24를 참조하면, 그리고 원격 제어장치(100)는 제 1 제스처 감지시 노트북(50)의 제 1 특성을 제어하는 제 1 제어 모드로 진입할 수 있다. 예를 들어, 제 1 제어 모드는 노트북(50)의 키보드 입력 모드일 수 있다. Referring to FIG. 24, the
도 25를 참조하면, 원격 제어장치(100)는 제 2 제스처에서 제 2 제어 모드로 진입할 수 있다. 예를 들어, 제 2 제어 모드는 노트북(50)의 마우스 입력 모드일 수 있다. Referring to Fig. 25, the
원격 제어장치(100)는 제어 모드에 따라 모션을 감지하여 원격 실행 신호를 생성하고 송신하여 노트북(50)을 제어할 수 있다. The
자세히, 원격 제어장치(100)는 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성할 수 있고, 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성할 수 있다. In detail, the
도 24를 참조하면, 원격 제어장치(100)는 손을 핀 상태에서 손가락을 움직이는 모션에 따라 키보드 입력 원격 실행 신호를 생성하고, 노트북(50)에 전송할 수 있다. Referring to FIG. 24, the
도 25를 참조하면, 원격 제어장치(100)는 손가락 하나를 핀 상태에서 손가락을 이동시키는 모션에 따라 마우스 입력 원격 실행 신호를 생성하고, 노트북(50)에 전송할 수 있다. 25, the
한편, 단순히 제 1 제스처와 제 2 제스처로 원격 실행신호를 생성할 수 있다. 예를 들어, 손을 쥐고 피는 제스처는 마우스 클릭 입력 원격 실행 신호를 생성할 수 있다. On the other hand, it is possible to simply generate a remote execution signal with the first gesture and the second gesture. For example, a hand grabbing gesture can generate a mouse click input remote execution signal.
이러한 실시예를 통해, 실시예에 따른 원격 제어장치(100)는 노트북(50)의 다양한 특성을 단순 제스처와 모션을 통해 직관적으로 제어할 수 있는 사용자 인터페이스를 제공하여, 사용자의 편의를 증진시키고 운전 주의를 유지시켜 안전 주행을 도모할 수 있다.Through such an embodiment, the
상술한 실시예에 설명된 특징, 구조, 효과 등은 본 발명의 적어도 하나의 실시예에 포함되며, 반드시 하나의 실시예에만 한정되는 것은 아니다. 나아가, 각 실시예에서 예시된 특징, 구조, 효과 등은 실시예들이 속하는 분야의 통상의 지식을 가지는 자에 의하여 다른 실시예들에 대해서도 조합 또는 변형되어 실시 가능하다. 따라서 이러한 조합과 변형에 관계된 내용들은 본 발명의 범위에 포함되는 것으로 해석되어야 할 것이다. The features, structures, effects and the like described in the foregoing embodiments are included in at least one embodiment of the present invention and are not necessarily limited to one embodiment. Further, the features, structures, effects, and the like illustrated in the embodiments may be combined or modified in other embodiments by those skilled in the art to which the embodiments belong. Therefore, it should be understood that the present invention is not limited to these combinations and modifications.
또한, 이상에서 실시예들을 중심으로 설명하였으나 이는 단지 예시일 뿐 본 발명을 한정하는 것이 아니며, 본 발명이 속하는 분야의 통상의 지식을 가진 자라면 본 실시예의 본질적인 특성을 벗어나지 않는 범위에서 이상에 예시되지 않은 여러 가지의 변형과 응용이 가능함을 알 수 있을 것이다. 예를 들어, 실시예들에 구체적으로 나타난 각 구성 요소는 변형하여 실시할 수 있는 것이다. 그리고 이러한 변형과 응용에 관계된 차이점들은 첨부한 청구 범위에서 규정하는 본 발명의 범위에 포함되는 것으로 해석되어야 할 것이다.While the present invention has been particularly shown and described with reference to exemplary embodiments thereof, it is clearly understood that the same is by way of illustration and example only and is not to be construed as limiting the scope of the present invention. It can be seen that various modifications and applications are possible. For example, each component specifically shown in the embodiments may be modified and implemented. It is to be understood that the present invention may be embodied in many other specific forms without departing from the spirit or essential characteristics thereof.
Claims (20)
상기 외부 기기를 제어하는 원격 실행 신호를 상기 외부 기기로 전송하는 무선 통신부;
상기 사용자의 제스처를 감지하는 제스처 센서;
상기 사용자의 모션을 감지하는 모션 센서; 및
상기 감지된 사용자의 제스처에 따라서 제 1 원격 실행 신호를 생성하고, 상기 감지된 모션에 따라 제 2 원격 실행 신호를 생성하는 제어부를 포함하는
원격 제어장치. 1. A watch-type wearable remote control device for controlling an external device remotely according to a user's input,
A wireless communication unit for transmitting a remote execution signal for controlling the external device to the external device;
A gesture sensor for sensing a gesture of the user;
A motion sensor for sensing motion of the user; And
And a controller for generating a first remote execution signal in accordance with the detected user's gesture and generating a second remote execution signal in accordance with the sensed motion
Remote control device.
상기 제스처는 상기 원격 제어장치를 착용한 상태에서 취한 유지 가능한 몸짓이고,
상기 제스처 센서는 적어도 2 이상의 제스처를 감지하는
원격 제어장치. The method according to claim 1,
Wherein the gesture is a sustainable gesture taken while wearing the remote control device,
Wherein the gesture sensor detects at least two gestures
Remote control device.
상기 제스처 센서는,
상기 사용자의 제스처에 따른 원격 제어장치와의 접촉 면적 변화를 정전용량 변화로 감지하는
원격 제어장치. The method according to claim 1,
The gesture sensor comprises:
A change in the contact area with the remote control device according to the gesture of the user is detected as a change in capacitance
Remote control device.
상기 모션 센서는,
가속도 센서(acceleration sensor), 자이로스코프 센서(gyroscope sensor) 및 중력 센서(geomagnetic sensor) 중 적어도 둘 이상을 포함하여 적어도 둘 이상의 모듈로 각기 다른 모션을 감지하는
원격 제어장치. The method according to claim 1,
The motion sensor includes:
A plurality of modules including at least two of an acceleration sensor, a gyroscope sensor, and a geomagnetic sensor,
Remote control device.
상기 가속도 센서는,
상기 사용자가 손목을 특정 방향으로 이동시키는 제 1 모션을 감지하고,
상기 자이로스코프 센서,
상기 사용자가 손목을 특정 방향으로 기울이는 제 2 모션을 감지하는
원격 제어장치.5. The method of claim 4,
The acceleration sensor includes:
Wherein the user senses a first motion for moving the wrist in a specific direction,
The gyroscope sensor,
Sensing a second motion in which the user tilts the wrist in a particular direction
Remote control device.
상기 제어부는 상기 감지된 사용자의 제스처에 따라서 제어 모드를 결정하고, 상기 결정된 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성하는
원격 제어장치. The method according to claim 1,
The control unit determines a control mode according to the sensed user's gesture and generates a remote execution signal in accordance with the motion of the sensed user in the determined control mode
Remote control device.
상기 제어부는,
상기 제스처 센서에서 제 1 제스처를 감지하면 제 1 제어 모드에서, 제 2 제스처를 감지하면 제 2 제어 모드에서 상기 감지된 사용자의 모션에 따라 원격 실행 신호를 생성하는
원격 제어장치. The method according to claim 6,
Wherein,
When the gesture sensor senses the first gesture, in the first control mode, and when the second gesture is sensed, generates the remote execution signal in accordance with the motion of the sensed user in the second control mode
Remote control device.
상기 제어부는,
상기 제 1 제어 모드에서 제 1 모션 감지시 제 1 원격 실행 신호를 생성하고,
상기 제 2 제어 모드에서 제 1 모션 감지시 제 3 원격 실행 신호를 생성하고,
상기 제 1 원격 실행 신호와 상기 제 3 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어하는
원격 제어장치. 8. The method of claim 7,
Wherein,
Generating a first remote execution signal upon first motion detection in the first control mode,
Generating a third remote signal at the first motion detection in the second control mode,
Wherein the first remote execution signal and the third remote execution signal control different characteristics of the external device
Remote control device.
상기 제 1 제어 모드에서 제 2 모션 감지시 제 2 원격 실행 신호를 생성하고,
상기 제 2 제어 모드에서 제 2 모션 감지시 제 4 원격 실행 신호를 생성하고,
상기 제 1 원격 실행 신호 내지 상기 제 4 원격 실행 신호는 상기 외부 기기의 각기 다른 특성을 제어하는
원격 제어장치. 9. The method of claim 8,
Generating a second remote execution signal upon a second motion detection in the first control mode,
Generating a fourth remote trigger signal at the second motion detection in the second control mode,
The first remote run signal to the fourth remote run signal may control different characteristics of the external device
Remote control device.
상기 외부 기기는 드론인
원격 제어장치.The method according to claim 1,
The external device
Remote control device.
상기 제어부는,
제 1 제스처 감지시 상기 드론을 상승시키는 원격 실행 신호를 생성하고,
상기 제 2 제스처 감지시 상기 드론을 하강시키는 원격 실행 신호를 생성하는,
원격 제어장치. The method according to claim 1,
Wherein,
Generating a remote execution signal that raises the drones upon sensing a first gesture,
Generating a remote execution signal to lower the drones upon sensing the second gesture;
Remote control device.
상기 제어부는,
제 1 모션 감지시 상기 드론의 기울기를 제어하는 원격 실행 신호를 생성하는
원격 제어장치. 12. The method of claim 11,
Wherein,
And generates a remote execution signal for controlling the slope of the drones upon the first motion detection
Remote control device.
상기 제어부는,
제 2 모션 감지시 상기 드론의 가속 방향을 제어하는 원격 실행 신호를 생성하는
원격 제어장치. 13. The method of claim 12,
Wherein,
And generates a remote execution signal for controlling the acceleration direction of the drones upon sensing the second motion
Remote control device.
상기 제어부는,
제 1 제스처 감지시 상기 드론의 이동 특성을 제어하는 제 1 제어 모드를 제공하고,
제 2 제스처 감지시 상기 드론의 카메라를 제어하는 제 2 제어 모드를 제공하는
원격 제어장치. 11. The method of claim 10,
Wherein,
Providing a first control mode for controlling the movement characteristics of the drones upon sensing a first gesture,
And a second control mode for controlling the camera of the drones upon detecting a second gesture
Remote control device.
상기 외부 기기는 스마트 티비인
원격 제어장치. 10. The method of claim 9,
The external device is a smart TV
Remote control device.
상기 제 1 제어 모드는 상기 스마트 티비의 채널을 제어하는 모드이고,
상기 제 2 제어 모드는 상기 스마트 티비의 음향을 제어하는 모드인
원격 제어장치. 16. The method of claim 15,
Wherein the first control mode is a mode for controlling a channel of the smart TV,
The second control mode is a mode for controlling the sound of the smart TV
Remote control device.
상기 무선 통신부는
블루투스 통신 방식으로 근접 거리에 위치한 상기 외부 기기에 직접 상기 원격 실행 신호를 전송하는 근거리 통신 모듈을 포함하는
원격 제어장치. The method according to claim 1,
The wireless communication unit
And a short range communication module for transmitting the remote execution signal directly to the external device located at a close distance by a Bluetooth communication method
Remote control device.
상기 제스처 감지 상태 및 상기 모션 감지 상태를 출력하는 출력부를 더 포함하는
원격 제어장치. The method according to claim 1,
And an output unit outputting the gesture sensing state and the motion sensing state
Remote control device.
원격 제어를 시작하는 단계;
사용자의 제스처를 감지하는 단계;
상기 사용자의 제스처 상태에 따라서 제어 모드를 결정하는 단계;
상기 결정된 제어 모드에서 상기 사용자의 모션 입력을 감지하는 단계;
상기 결정된 제어 모드에서 상기 모션 입력에 따른 원격 실행신호를 생성하는 단계; 및
상기 원격 실행신호를 상기 외부 기기로 무선 전송하는 단계;를 포함하는
원격 제어방법.A method for remotely controlling an external device using a watch-type remote control device,
Initiating a remote control;
Detecting a gesture of the user;
Determining a control mode according to the gesture state of the user;
Sensing the motion input of the user in the determined control mode;
Generating a remote execution signal according to the motion input in the determined control mode; And
And wirelessly transmitting the remote execution signal to the external device
Remote control method.
상기 원격 제어 장치로부터 상기 원격 실행신호를 수신하고, 상기 수신된 원격 실행신호에 따라 제어되는 외부 기기를 포함하는
원격 제어시스템.A remote control device for determining a control mode according to a gesture of a user with a watch type wearable device, generating a remote execution signal according to a motion input in a determined control mode, and wirelessly transmitting the remote execution signal; And
A remote control unit for receiving the remote execution signal from the remote control unit and including an external device controlled in accordance with the received remote execution signal,
Remote control system.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150134523A KR20170035547A (en) | 2015-09-23 | 2015-09-23 | Remote controll device, remote controll method and remote controll system |
| CN201690001180.8U CN208188782U (en) | 2015-09-23 | 2016-08-18 | Remote control equipment, long-range control method and tele-control system |
| PCT/KR2016/009095 WO2017052077A1 (en) | 2015-09-23 | 2016-08-18 | Remote control device, remote control method and remote control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020150134523A KR20170035547A (en) | 2015-09-23 | 2015-09-23 | Remote controll device, remote controll method and remote controll system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170035547A true KR20170035547A (en) | 2017-03-31 |
Family
ID=58386184
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020150134523A KR20170035547A (en) | 2015-09-23 | 2015-09-23 | Remote controll device, remote controll method and remote controll system |
Country Status (3)
| Country | Link |
|---|---|
| KR (1) | KR20170035547A (en) |
| CN (1) | CN208188782U (en) |
| WO (1) | WO2017052077A1 (en) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101852851B1 (en) * | 2017-11-10 | 2018-04-27 | (유)동아하이테크 | An apparatus for controlling a drone |
| KR101884125B1 (en) * | 2017-06-13 | 2018-07-31 | 이승호 | System for Self-Camera and Method using the same |
| KR101887314B1 (en) * | 2017-12-14 | 2018-08-09 | 세종대학교산학협력단 | Remote control device and method of uav, motion control device attached to the uav |
| KR20190048565A (en) * | 2017-10-31 | 2019-05-09 | 용비에이티(주) | Method for controlling dron and augmented reality sightseeing system therefor |
| KR20190076407A (en) * | 2017-12-22 | 2019-07-02 | 세종대학교산학협력단 | Remote control device and method of uav |
| KR20190098893A (en) * | 2018-02-14 | 2019-08-23 | 동국대학교 산학협력단 | Math0d and device for generating control signal of drones |
| US10545495B2 (en) | 2017-12-14 | 2020-01-28 | Industry Academy Cooperation Foundation Of Sejong University | Remote control device and method for UAV and motion control device attached to UAV |
| WO2021046328A1 (en) * | 2019-09-06 | 2021-03-11 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
| KR102228151B1 (en) * | 2019-10-29 | 2021-03-16 | 이승훈 | Smart screen remote control device |
| KR20230070889A (en) * | 2021-11-15 | 2023-05-23 | 국방과학연구소 | Controller and operating method thereof |
| US11907431B2 (en) | 2019-09-06 | 2024-02-20 | Warner Bros. Entertainment Inc. | Gesture recognition device with minimal wand form factor |
| US11972059B2 (en) | 2022-03-04 | 2024-04-30 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109521784B (en) * | 2018-12-13 | 2021-05-11 | 华南农业大学 | Touch sensing type wearable upper limb exoskeleton unmanned aerial vehicle control system and method |
| CN110175059A (en) * | 2019-04-16 | 2019-08-27 | 上海达龙信息科技有限公司 | Remote desktop control method and system, storage medium, server based on gyroscope |
| CN110515457A (en) * | 2019-08-21 | 2019-11-29 | 辽宁科技大学 | A kind of device and method of long-range identification gesture |
| USD967801S1 (en) | 2021-02-10 | 2022-10-25 | Meta Platforms Technologies, Llc | Wearable device |
| CN111913580A (en) * | 2020-08-12 | 2020-11-10 | 南京工业职业技术学院 | Gesture unmanned aerial vehicle controller based on infrared photoelectricity |
| USD997754S1 (en) | 2021-02-10 | 2023-09-05 | Meta Platforms Technologies, Llc | Wearable device |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101793566B1 (en) * | 2013-08-23 | 2017-11-03 | 후아웨이 테크놀러지 컴퍼니 리미티드 | Remote controller, information processing method and system |
| KR20150029453A (en) * | 2013-09-10 | 2015-03-18 | 엘지전자 주식회사 | Wearable device and control method for wearable device |
| US20150145653A1 (en) * | 2013-11-25 | 2015-05-28 | Invensense, Inc. | Device control using a wearable device |
| KR20150099324A (en) * | 2014-02-21 | 2015-08-31 | 삼성전자주식회사 | Method for romote control between electronic devices and system therefor |
| KR20150063998A (en) * | 2015-05-21 | 2015-06-10 | 엘지이노텍 주식회사 | Mobile communication terminal with the remote control function and control method thereof |
-
2015
- 2015-09-23 KR KR1020150134523A patent/KR20170035547A/en not_active Application Discontinuation
-
2016
- 2016-08-18 CN CN201690001180.8U patent/CN208188782U/en not_active Expired - Fee Related
- 2016-08-18 WO PCT/KR2016/009095 patent/WO2017052077A1/en active Application Filing
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101884125B1 (en) * | 2017-06-13 | 2018-07-31 | 이승호 | System for Self-Camera and Method using the same |
| KR20190048565A (en) * | 2017-10-31 | 2019-05-09 | 용비에이티(주) | Method for controlling dron and augmented reality sightseeing system therefor |
| KR101852851B1 (en) * | 2017-11-10 | 2018-04-27 | (유)동아하이테크 | An apparatus for controlling a drone |
| US10545495B2 (en) | 2017-12-14 | 2020-01-28 | Industry Academy Cooperation Foundation Of Sejong University | Remote control device and method for UAV and motion control device attached to UAV |
| KR101887314B1 (en) * | 2017-12-14 | 2018-08-09 | 세종대학교산학협력단 | Remote control device and method of uav, motion control device attached to the uav |
| KR20190076407A (en) * | 2017-12-22 | 2019-07-02 | 세종대학교산학협력단 | Remote control device and method of uav |
| KR20190098893A (en) * | 2018-02-14 | 2019-08-23 | 동국대학교 산학협력단 | Math0d and device for generating control signal of drones |
| WO2021046328A1 (en) * | 2019-09-06 | 2021-03-11 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
| GB2603392A (en) * | 2019-09-06 | 2022-08-03 | Warner Bros Entertainment Inc | Gesture-centric user interface |
| GB2603392B (en) * | 2019-09-06 | 2023-05-17 | Warner Bros Entertainment Inc | Gesture-centric user interface |
| US11907431B2 (en) | 2019-09-06 | 2024-02-20 | Warner Bros. Entertainment Inc. | Gesture recognition device with minimal wand form factor |
| US11914786B2 (en) | 2019-09-06 | 2024-02-27 | Warner Bros. Entertainment Inc. | Gesture recognition (GR) device with multiple light sources generating multiple lighting effects |
| KR102228151B1 (en) * | 2019-10-29 | 2021-03-16 | 이승훈 | Smart screen remote control device |
| KR20230070889A (en) * | 2021-11-15 | 2023-05-23 | 국방과학연구소 | Controller and operating method thereof |
| US11972059B2 (en) | 2022-03-04 | 2024-04-30 | Warner Bros. Entertainment Inc. | Gesture-centric user interface |
Also Published As
| Publication number | Publication date |
|---|---|
| CN208188782U (en) | 2018-12-04 |
| WO2017052077A1 (en) | 2017-03-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170035547A (en) | Remote controll device, remote controll method and remote controll system | |
| JP6751116B2 (en) | Hand rehabilitation exercise system and method | |
| CN208861246U (en) | Finger-worn type equipment with sensor and tactile | |
| US10802598B2 (en) | User interface control of responsive devices | |
| US10139906B1 (en) | Ring human-machine interface | |
| US9978261B2 (en) | Remote controller and information processing method and system | |
| US10168775B2 (en) | Wearable motion sensing computing interface | |
| KR102212030B1 (en) | Glass type terminal and control method thereof | |
| JP5969626B2 (en) | System and method for enhanced gesture-based dialogue | |
| CN112424730A (en) | Computer system with finger device | |
| US20160124579A1 (en) | Controlling multiple devices with a wearable input device | |
| US10120444B2 (en) | Wearable device | |
| KR20150088599A (en) | Mobile terminal and method for controlling the same | |
| KR20160035948A (en) | Mobile terminal and system including the same | |
| US20120068925A1 (en) | System and method for gesture based control | |
| JP2010108500A (en) | User interface device for wearable computing environmental base, and method therefor | |
| KR20130101975A (en) | Wearable motion sensing computing interface | |
| US20150185852A1 (en) | Ring mobile device and operation method of the same | |
| US20190265796A1 (en) | Systems and Methods for Providing Electrostatic Haptic Effects via a Wearable or Handheld Device | |
| TW201447373A (en) | Display control apparatus, display apparatus, display control method, and program | |
| JP2015121979A (en) | Wearable information input device, information input system and information input method | |
| JP6536881B2 (en) | Display device, information display method, information display program | |
| KR20160008890A (en) | Apparatus and method for providing touch inputs by using human body | |
| US20140327528A1 (en) | Interface, Hardware Remote Controller and Remote Control System | |
| KR101497829B1 (en) | Watch type device utilizing motion input |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |