KR20150002995A - Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 - Google Patents
Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 Download PDFInfo
- Publication number
- KR20150002995A KR20150002995A KR20130075311A KR20130075311A KR20150002995A KR 20150002995 A KR20150002995 A KR 20150002995A KR 20130075311 A KR20130075311 A KR 20130075311A KR 20130075311 A KR20130075311 A KR 20130075311A KR 20150002995 A KR20150002995 A KR 20150002995A
- Authority
- KR
- South Korea
- Prior art keywords
- distortion
- pattern
- fov
- image
- model
- Prior art date
Links
- 238000012937 correction Methods 0.000 title claims abstract description 67
- 238000000034 method Methods 0.000 title claims abstract description 25
- 230000015572 biosynthetic process Effects 0.000 abstract description 6
- 238000012544 monitoring process Methods 0.000 abstract description 6
- 238000003786 synthesis reaction Methods 0.000 abstract description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000003287 optical effect Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000001454 recorded image Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000037007 arousal Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/80—Geometric correction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/04—Context-preserving transformations, e.g. by using an importance map
- G06T3/047—Fisheye or wide-angle transformations
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/30—Determination of transform parameters for the alignment of images, i.e. image registration
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Processing (AREA)
- Studio Devices (AREA)
Abstract
본 발명은 OV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법에 관한 것으로서, 본 발명에 따른 OV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법은 FOV 왜곡 모델에 격자무늬 2D 평면을 적용하여 초 광 시야 각을 갖는 렌즈의 왜곡중심 보정을 통해 촬영된 영상에 포함된 왜곡을 정밀하게 보정 할 수 있도록 하는 것을 특징으로 한다. 본 발명에 따르면, 수직, 수평에 대한 왜곡을 완벽하게 보정 할 수 있고, 이렇게 왜곡이 완벽하게 제거된 영상으로 영상 처리를 하거나, 인식 혹은 사용자 모니터링으로 사용할 수 있도록 하며, 특히 어라운드 뷰에서 발생한 미세한 왜곡으로 인하여 다채널 영상의 합성에서 발생하는 합성 오차를 최소화하도록 할 수 있다.
Description
본 발명은 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법에 관한 것으로서, 보다 구체적으로는 광각렌즈에 FOV모델에 2D 패턴을 적용하여 왜곡중심을 보정 함으로써 촬영된 영상의 왜곡을 보정 하는 방법에 관한 것이다.
최근 들어 차량에는 사고 발생시 정보 기록 및 안전 운행 보조 역할을 하는 블랙박스 시스템, 어라운드 뷰 모니터링 시스템 등이 장착되는 추세며, 이러한 시스템들은 광시야각 렌즈가 장착된 카메라를 사용하여 적은 해상도에 많은 형상을 담을 수 있고, 각도가 190도 이상의 영상을 VGA, HD, Full HD 급으로 기록할 수 있으며, 기록된 영상의 왜곡을 보정하여 사용자가 모니터링할 수 있도록 한다.
즉, 최근에는 고급기종의 차량에 AVM 시스템 등이 옵션으로 장착되는 추세고, 일반적으로 차량에는 전방, 후방, 좌측, 우측에 초-광 시야 각 렌즈를 내장한 카메라 장치가 장착되어 있으며, 이러한 카메라 장치는 차량 주변의 최대 수평, 수직 영상 등을 촬영할 수 있고, AVM 시스템은 차량에 장착된 3개 이상의 카메라 장치로부터 차량 주변의 영상 정보를 취득할 수 있으며, 취득된 영상에는 카메라 장치에 내장된 초-광 시야 각 렌즈로 인해 왜곡이 포함되어 있으므로, 운전자가 차량 내에서 차량 주변을 모니터링할 수 있도록 취득된 영상의 왜곡을 보정하여 운전자에게 제공할 수 있다.
한편, 차량용 카메라로 많이 사용되는 광각 카메라 렌즈는 카메라 장치의 영상 촬영시 촬영된 영상에 렌즈 중심을 기준으로 가까운 곳을 지나는 광선 보다 멀리 지나는 광선이 더 많이 휘는 현상에 의해 발생하는 방사 왜곡(술통 왜곡)과, 카메라 제조 과정에서 렌즈와 영상 평면이 평행을 이루지 못해 발생하는 접선왜곡을 야기시킨다.
이러한 초 광 시야 각 렌즈가 내장된 카메라 장치는 영상 촬영시 발생하는 왜곡을 보정 하기 위해 FOV(Field of View) 모델을 사용할 수 있으나, 이러한 FOV 모델을 사용할 경우 왜곡 중심 설정에 오류가 발생할 수 있다는 문제점이 있다.
FOV(Field of View)는 시야로서 카메라 렌즈를 부착하여 보이는 영상을 촬영하였을 경우 그 촬영한 영상의 영역(사이즈)을 나타내는 것이다.
또한, 운전자에게 큰 시야 각을 확보해줄 수 있는 어안렌즈(fisheye lens)는 차량의 안전 주행을 위한 정보 서비스를 제공하는데 그 사용 빈도가 점차 증가하는 추세다.
어안렌즈에 의해 획득된 영상 데이터에는 많은 영상 정보 데이터가 포함되어 있으며, 어안렌즈의 광학적 특성으로 인해 어안렌즈가 영상 데이터를 획득할 때 비선형 왜곡이 발생하고, 비선형 왜곡이 발생한 영상 데이터는 FOV(Field of View)모델을 통해 왜곡이 보정될 수 있다.
그러나, FOV 모델에 의한 왜곡 보정의 경우 렌즈의 왜곡중심을 별도로 추정하지 않기 때문에, 영상의 중심점과 렌즈의 왜곡중심 간의 오차가 커질 경우 왜곡 보정의 정확도가 떨어진다는 문제점이 있다.
본 발명은 상기와 같은 문제점을 감안하여 창출한 것으로서, FOV 왜곡 모델에 격자무늬 2D 평면을 적용하여 초 광 시야 각을 갖는 렌즈의 왜곡중심 보정을 통해 촬영된 영상에 포함된 왜곡을 정밀하게 보정 할 수 있도록 하는 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법을 제공하는 데 그 목적이 있다.
즉, 본 발명은 FOV모델에서 왜곡중심을 추정하지 않아서 직선 선분이 곡선으로 표현되고, 한쪽으로 편향되어 표현되는 문제를 2D 패턴을 적용하여 왜곡의 원점을 찾아 왜곡을 정밀하게 보정 함으로써 해결할 수 있도록 하는 것을 목적으로 한다.
전술한 목적을 달성하기 위하여, 본 발명의 일면에 따른 FOV(Field of View)왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법은 광각 렌즈가 장착된 카메라 장치를 통해 직선의 교차점을 갖는 상기 2D패턴을 촬영하는 단계; 상기 2D 패턴이 촬영된 FOV 모델에서 각각의 코너 점인 수직 A개, 수평 B개인 교차점을 검출하는 단계(A>B); 최 외각 점을 중심으로 수직으로 C개의 직선과 수평으로 D개의 직선을 생성하는 단계(C>D); 및 생성된 각 직선 내에 중앙에 비치되는 교차점의 유무를 검색하고 검색결과에 따라 왜곡 보정을 최대화하는 단계를 포함하고, 상기 최대화하는 단계는, 생성된 각 직선의 행과 열 방향으로 각각 더하여 행과 열의 각 중심에 대해서 최소한의 거리를 갖는 직선 방정식을 구하여 왜곡 보정을 최대화하는 단계인 것을 특징으로 한다.
본 발명에 따르면, 수직, 수평에 대한 왜곡을 완벽하게 보정 할 수 있다.
이렇게 왜곡이 완벽하게 제거된 영상으로 영상 처리를 하거나, 인식 혹은 사용자 모니터링으로 사용할 수 있도록 한다.
특히 어라운드 뷰에서 발생한 미세한 왜곡으로 인하여 다채널 영상의 합성에서 발생하는 합성 오차를 최소화하도록 할 수 있다.
도 1 및 도 2는 종래의 기술을 설명하기 위한 도면.
도 3은 왜곡 계수 추정 방법을 적용시켜 왜곡 보정된 영상에서 미세한 오차가 발생하는 것을 설명하기 위한 되면.
도 4는 본 발명의 일 실시예에 따른 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 장치를 설명하기 위한 도면.
도 5는 2D 평면 패턴의 왜곡 보정 알고리즘을 설명하기 위한 도면.
도 6은 수직 수평 방향에 대한 왜곡 보정 결과를 설명하기 위한 도면.
도 7은 검출된 왜곡중심을 기준으로 FOV 왜곡 보정을 적용하여 왜곡 보정한 영상을 설명하기 위한 도면.
도 3은 왜곡 계수 추정 방법을 적용시켜 왜곡 보정된 영상에서 미세한 오차가 발생하는 것을 설명하기 위한 되면.
도 4는 본 발명의 일 실시예에 따른 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 장치를 설명하기 위한 도면.
도 5는 2D 평면 패턴의 왜곡 보정 알고리즘을 설명하기 위한 도면.
도 6은 수직 수평 방향에 대한 왜곡 보정 결과를 설명하기 위한 도면.
도 7은 검출된 왜곡중심을 기준으로 FOV 왜곡 보정을 적용하여 왜곡 보정한 영상을 설명하기 위한 도면.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 방법은 첨부되는 도면과 함께 상세하게 후술되어 있는 실시예들을 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예들에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현될 것이며, 단지 본 실시예들은 본 발명의 개시가 완전하도록 하며, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 용이하게 이해할 수 있도록 제공되는 것이며, 본 발명은 청구항의 기재에 의해 정의된다. 한편, 본 명세서에서 사용된 용어는 실시예들을 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 "포함한다(comprises)" 또는 "포함하는(comprising)"은 언급된 구성요소, 단계, 동작 및/또는 소자 이외의 하나 이상의 다른 구성요소, 단계, 동작 및/또는 소자의 존재 또는 추가를 배제하지 않는다.
한편, 종래의 카메라 모델 중요 파라미터와 다항식의 왜곡 모델 적용에 대해 설명하면 하기와 같다.
카메라를 이용한 영상처리 알고리즘은 핀홀 카메라 모델의 영상 투영에 대한 연구에서부터 시작되었으며, 영상 획득을 위해(핀홀 카메라의 작은 구멍의 적은 빛의 양 대비 많은 양의 빛을 수집하기 위해)서는 굴절 렌즈가 사용되어야 하는데, 굴절 렌즈는 제조 과정에서 영상센서와 완벽한 정렬을 이루기 어렵고, 이러한 렌즈의 특성상 획득된 영상이 2차 평면에 투영될 경우 투영된 영상에 왜곡이 발생할 가능성이 높다.
핀홀 카메라의 물체와 영상 평면은 왜곡중심을 기준으로 비례 관계(물체의 거리:물체 = 초점거리:투영 영상)에 있으며, 이러한 관계로부터 영상 평면에 표현된 점의 좌표는 하기와 같이 도출될 수 있다.
xscreen = fx(x/z) + Cx
yscreen = fy(y/z) + Cy
상기 도출된 좌표에서 fx는 초점 거리를 표현하는 변수이고, z는 물체의 거리에 대응되는 변수이며, C는 투영 평면에서 좌표 중심의 이동 변위를 표현하는 변수이다. 즉, 영상 평면에 표현되는 점의 좌표는 fx와 z의 비와 이동 변위 C로 결정된다.
초점거리(fx)는 렌즈의 실제 초점 거리에 영상 센서의 개별 요소의 크기(sx)를 곱한 값이며, fx=Fsx, fy=Fsy가 성립된다.
왜곡 보정을 손쉽게 적용하기 위해 사용되는 방법을 설명하면 하기와 같다.
임의의 점 P에 대해 카메라 좌표계로 정의된 영상 평면에 대해 mu =(xu, yu)에 위치한다고 가정하면, 렌즈 왜곡에 의해 mu는 왜곡된 점 md= (xd,yd)로 변환된다. 어안렌즈로 인한 왜곡은 방사형 왜곡에 의해 결정되므로, 영상의 중심 c(x0,y0)까지의 거리인 rd에 의해 결정된다. 왜곡 함수를 R로 표기하면, 왜곡된 입력 영상 ru는 하기와 같다.
R : ru->rd = R(ru)

렌즈의 왜곡모델에 왜곡 보정계수 kl(l = 1,2,3, ...)가 포함된 무한 급수로 X축 Y축에 대해서 표현하면 하기와 같다.
이러한 다항식 왜곡 보정 모델은 직관적인 방법으로 Shah와 Aggarwal 논문에서 7차 항까지 적용된 경우도 있다. 완벽하게 왜곡 보정이 이루어지지 않지만, 직관적으로 처리가능하며, 화각이 크지않은 경우에 사용되면 좋은 결과를 얻을 수 있으며, FPGA와 같은 형태로 제작될 수 있다.
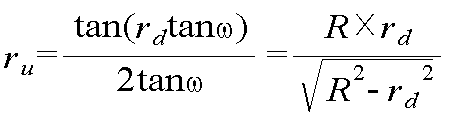
또한, FOV(Field of View)모델 왜곡 모델은 어안렌즈에서의 거리 측정을 위한 파라미터 도출에 필요하고, 광학적 모델을 기초로 하므로 도 1에 도시된 바와 같이 각도 ω에 대해서 삼각방정식에 의해서 유도되며, 비에 따라 비례한다.
ru는 구의 중심에서부터 원래 이미지의 한 점까지의 거리 값이고, rd는 구면 위로 투영되어 왜곡된 위치까지의 거리 값이다.
점(A)가 구 위의 평면으로 투영이 되는 방사 왜곡으로 인해 점(B)의 위치로 오게 되고, 어안렌즈를 통해 들어오게 되면, 평면상으로 투영이 되어 방사 왜곡이 발생한다. FOV 모델의 왜곡 함수와 그의 역함수를 이용하여 rd와 ru를 구할 수 있으며, 왜곡중심(C)을 중심으로 하는 FOV 모델 왜곡 보정을 하면 하기와 같이 나타낼 수 있다.

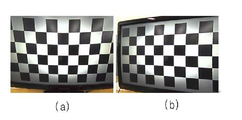
왜곡중심을 중심으로 하는 FOV 모델 왜곡 보정 영상은 도 2에 도시된 바와 같고, 좌측 영상은 왜곡중심을 중심으로 FOV 모델 왜곡을 보정한 것이며, 우측 영상은 왜곡중심 오차가 X축은 -30pixel이고, Y축은 +30pixel인 것이다.
즉, FOV 모델을 이용하여 왜곡 보정을 하면, 왜곡중심의 오차에 따라 서로 다른 영상이 만들어질 수 있고, 왜곡중심의 정확도에 비례해서 왜곡이 더 심해지는 것을 알 수 있다.
이하, 도 3 내지 도 7을 참조하여 본 발명의 일 실시예에 따른 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법을 설명한다. 도 3은 왜곡 계수 추정 방법을 적용시켜 왜곡 보정된 영상에서 미세한 오차가 발생하는 것을 설명하기 위한 되면이고, 도 4는 본 발명의 일 실시예에 따른 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 장치를 설명하기 위한 도면이며, 도 5는 2D 평면 패턴의 왜곡 보정 알고리즘을 설명하기 위한 도면이고, 도 6은 수직 수평 방향에 대한 왜곡 보정 결과를 설명하기 위한 도면이며, 도 7은 검출된 왜곡중심을 기준으로 FOV 왜곡 보정을 적용하여 왜곡 보정한 영상을 설명하기 위한 도면이다.
본 발명의 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법은 카메라 모델의 왜곡 보정 방법인 왜곡중심 보정 방법을 최적화시켜 2D패턴을 이용하여 왜곡 거리를 추정하는 것으로서, 수식에 대해 소수점 연산을 하고, 최상의 왜곡 보정 값을 갖도록 수식을 단순화하는 것이다.
FOV 모델의 왜곡 계수(ω)추정은 하기와 같다.
카메라 모델은 왜곡이 없는 경우 3차원에서 직선이면 카메라 모델에 의해 투영된 후에도 직선이다. 이러한 것은 실제의 직선 선분과 투영된 직선의 차가 크면 클수록 왜곡이 많다는 것을 의미하고, 적으면 적을수록 왜곡이 없다는 것을 의미한다.
한편, 왜곡 계수(ω)는 카메라의 왜곡 정도를 나타내고, D-1(ω, pi) 함수에 대해 p1에서 pn까지 알고리즘 적용 시 거리의 최소 자승의 선형 방정식은 수학식 1과 같다.
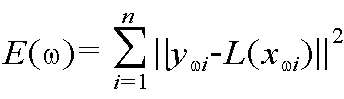
왜곡 계수(ω)에 대해 오차 함수 Eij(ω)가 최소가 되는 i, j의 함수 방정식을 구하면 왜곡 계수(ω)를 추정할 수 있고, 추정된 왜곡 보정 계수를 이용하여 카메라 왜곡중심에 대한 보정을 행할 수 있다.
그러나, 왜곡 계수 추정 방법을 적용시킬 경우 체스판 패턴 촬영 후, 왜곡 보정이 추정된 왜곡 계수만으로 빠르게 동작 되지만, 도 3에 도시된 바와 같이 체스판의 행, 열의 선분에 미세한 오차가 발생한다.
즉, 도 3은 왜곡 계수 추정 방법을 적용시켜 왜곡 보정된 영상에서 미세한 오차가 발생하는 것을 설명하기 위한 것으로서, 왜곡 보정된 체스판 패턴의 Harris corner detector에 의해 검출된 점을 잇는 직선과 코너 점까지의 거리 오차를 나타낸 것이다.
이러한 왜곡 계수 추정 방법을 적용시켜 왜곡 보정을 행할 경우 발생하는 미세 오차를 해결하기 위해 본 발명에서는 2차원 패턴을 적용하여 왜곡 거리를 하기와 같이 추정한다.
본 발명의 2차원 패턴을 이용한 왜곡 거리 추정 방법은 체스 패턴을 이용한 2차원 패턴에서 코너 점을 검출하고, 코너 점을 연결한 직선인 수직과 수평 방향의 직선에 대해 왜곡이 없는 직선을 구하는 것이다.
즉, 최 외각의 코너 점을 연결한 직선에 대해 내부의 코너 점과의 거리를 왜곡 오차의 거리(d)로 표현하고, 직선에 대해 내부 점들에 대한 왜곡의 정도를 왜곡 오차 거리의 합(d1 + ... + dn)으로 측정하는 것이다.
다시 설명하면, 3차원의 영상에 대한 왜곡 보정을 위해 2차원 평면을 적용하고, 정밀 오차 보정을 위해 최 외각 점을 잊는 선분과 코너까지의 값인 정밀 오차의 제곱의 합이 최소가 되는 값을 찾으면, 수평, 수직에 대해서 원 영상의 체크 패턴을 구성하는 직선선분이 왜곡되어서 타원으로 표현되고, 이를 보정하여 직선 선분에서 미세한 오차에 대해 최소가 되는 직선 선분을 도출하기 위해 직선에 대해 코너 점까지의 거리의 차에 대한 제곱의 합이 최소가 되는 값을 찾는 것이다.
수평, 수직에 대해서 미세한 오차 거리를 갖는 함수 Eij(cx,cy), Eji(cx, cy)를 이용하여 행과 열의 직선 선분에 대해 최소가 되는 거리를 계산하여 구하면 수학식 2와 같다.



직선 교차점을 갖는 체스 패턴에서 각각의 코너 점인 수직 10개, 수평 5개인 교차점을 찾고, 중요 점인 외각 교점을 이용하여 최 외각의 점을 중심으로 수직으로 11개의 직선과 수평으로 6개의 직선을 생성한 다음 중앙에 비치되는 교차점의 유무를 검색하여 직선 내에 존재 유무를 평가한다.
직선이 행과 열 방향으로 각각 더하고, cx,cy에 대해 최소한의 거리를 갖는 직선의 방정식을 구하면, 왜곡 보정을 최대화할 수 있다.
행 선분의 직선  에 대해 에러 점을 갖는
에 대해 에러 점을 갖는  점에 대해 거리를 구하고 합한 후 제곱의 합을 구하여 측정한다.
점에 대해 거리를 구하고 합한 후 제곱의 합을 구하여 측정한다.
이러한 원리를 이용하여, 실 세계에서 직선 위에 있는 점들이 그리는 직선과 이 점들이 카메라 모델에 의해 투영되고 왜곡 보정 후 위치와의 거리를 계산한 값을 왜곡 거리(distortion distance)로 취할 수 있다.
전술한 바와 같이, FOV 왜곡 보정 모델을 적용한 왜곡 보정 알고리즘에 2차원 패턴을 이용한 왜곡 거리 추정 방법을 적용함으로써, 왜곡 보정에서 발생하는 미세 오차에 대해 정교하게 보정을 할 수 있다.
본 발명의 FOV 왜곡 보정 모델에 2D 패턴을 적용한 왜곡 보정 알고리즘 구현은 하기와 같다.
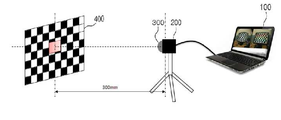
도 4에 도시된 바와 같이, 본 발명의 왜곡 보정 장치는 노트북(100), USB 카메라(200), 광각 렌즈(300) 및 체스판(400)을 포함한다.
노드북(100)은 i7일 수 있고, 4GB 램, 윈도우7 OS, Visual Studio 2010, OpenCV 2.4.4를 포함하며, 1/4 CCD를 이용하여 USB 카메라(200)에 접속한 후 720P 영상을 취득하여 왜곡 보정을 행한다.
USB 카메라(200)의 광각 렌즈(300)는 1/4 카메라 렌즈로서, Optical FOV Horizontal 195deg typ, Veritical 159 deg typ, Distortion Less Than 2%의 SPEC으로 구성된다.
체스판(400)은 블랙/화이트로 구성되고, 가로 11개, 세로 6개로 구성되며, 이미지 파일을 구성하는 하나의 사각형은 163px * 163px이고, 실제 길이는 45mm인 정사각형이다.
체스판(400)의 패턴, 광각 렌즈(300)와 CCD 센서가 내장된 USB 카메라(200)에 의해 촬영된 카메라 모델은 광축으로 구성되며, 실시간으로 노트북(100)에서 재생되고, 본 발명의 알고리즘, 즉 도 5에 도시된 2D 패턴의 왜곡 보정 알고리즘이 적용된 프로그램에 의해 실시간 처리된다.
한편, 편향된 왜곡 계수(ω)에 의해 잘못 왜곡되는 경우에는 도 6에 도시된바와 같이 수직 방향으로 보정되지만 수평으로 보정되지 않고(a), 수평으로 보정되지만 수직으로는 보정되지 않는다(b). 이러한 현상은 왜곡 보정을 위한 왜곡 중심축이 잘못 지정되어 발생하는 것으로 이러한 오류를 최소화하기 위해 체스판 패턴과 같은 2D 패턴을 이용한 왜곡 거리 추정 방법을 이용하여 왜곡의 정교한 중심축을 찾을 수 있으며, 이렇게 하면 카메라 내장시, 혹은 실험구성시에 발생하는 기구적인 오류에 의해서 발생하는 왜곡 보정 오류를 도 7에 도시된 바와 같이 최소화할 수 있다.
전술한 바와 같이, 영상처리 기술이 차량에 적용되는 경우가 증가하고 있으며, 그 실 예로 블랙박스 시스템, 어라운드 뷰 모니터링 시스템 등 사고 발생시 정보 기록 및 안전 운행 보조 역할의 임베디드 시스템이 많이 사용되고 있다. 적은 해상도에 많은 영상을 담기 위해서 광 시야 각 렌즈가 사용되며, 이러한 카메라 렌즈는 190도 이상 각도의 영상을 VGA, HD, Full HD 급으로 기록한다. 이렇게 기록된 영상을 영상처리 혹은 영상 인식하거나 모니터링할 수 있도록 하기 위해 왜곡 보정이 필수적으로 행해진다.
본 발명에서는 정교하게 왜곡 보정을 할 수 있도록 2D 패턴을 이용하여 왜곡의 원점을 찾아 보정 하는 방법을 제시한다. 이렇게 함으로써 수직, 수평에 대해 완벽한 왜곡 보정을 행할 수 있으며, 실상의 영상의 크기 및 왜곡이 제거된 영상을 취득하여 영상처리 하거나, 인식, 혹은 사용자 모니터링으로 사용하도록 할 수 있다. 특히 어라운드 뷰에서 발생한 미세한 왜곡으로 인해 다채널 영상의 합성시 발생할 수 있는 합성 오차을 최소화할 수 있다.
이상 바람직한 실시예와 첨부도면을 참조하여 본 발명의 구성에 관해 구체적으로 설명하였으나, 이는 예시에 불과한 것으로 본 발명의 기술적 사상을 벗어나지 않는 범주내에서 여러 가지 변형이 가능함은 물론이다. 그러므로 본 발명의 범위는 설명된 실시예에 국한되어 정해져서는 안되며 후술하는 특허청구의 범위뿐만 아니라 이 특허청구의 범위와 균등한 것들에 의해 정해져야 한다.
100 : 노트북 200 : USB 카메라
300 : 광각 렌즈 400 : 체스판
300 : 광각 렌즈 400 : 체스판
Claims (1)
- FOV(Field of View)왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법에 있어서,
광각 렌즈가 장착된 카메라 장치를 통해 직선의 교차점을 갖는 상기 2D패턴을 촬영하는 단계;
상기 2D 패턴이 촬영된 FOV 모델에서 각각의 코너 점인 수직 A개, 수평 B개인 교차점을 검출하는 단계(A>B);
최 외각 점을 중심으로 수직으로 C개의 직선과 수평으로 D개의 직선을 생성하는 단계(C>D); 및
생성된 각 직선 내에 중앙에 비치되는 교차점의 유무를 검색하고 검색결과에 따라 왜곡 보정을 최대화하는 단계를 포함하고,
상기 최대화하는 단계는,
생성된 각 직선의 행과 열 방향으로 각각 더하여 행과 열의 각 중심에 대해서 최소한의 거리를 갖는 직선 방정식을 구하여 왜곡 보정을 최대화하는 단계인 것
인 FOV왜곡 보정 모델에 2D패턴을 적용한 왜곡중심 보정 방법.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20130075311A KR101482645B1 (ko) | 2013-06-28 | 2013-06-28 | Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20130075311A KR101482645B1 (ko) | 2013-06-28 | 2013-06-28 | Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20150002995A true KR20150002995A (ko) | 2015-01-08 |
| KR101482645B1 KR101482645B1 (ko) | 2015-01-16 |
Family
ID=52475974
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR20130075311A KR101482645B1 (ko) | 2013-06-28 | 2013-06-28 | Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101482645B1 (ko) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107525652A (zh) * | 2016-06-22 | 2017-12-29 | 北京疯景科技有限公司 | 镜头畸变测试方法、装置及系统 |
| CN109443697A (zh) * | 2018-09-29 | 2019-03-08 | 歌尔股份有限公司 | 光学中心测试方法、装置、系统和设备 |
| CN109712058A (zh) * | 2018-12-03 | 2019-05-03 | 深圳前海达闼云端智能科技有限公司 | 数据集采集器 |
| KR102167828B1 (ko) * | 2019-06-13 | 2020-10-20 | 주식회사 넥스트칩 | 왜곡 영상을 보정하는 방법 및 장치 |
| CN112288822A (zh) * | 2020-09-22 | 2021-01-29 | 苏州艾微视图像科技有限公司 | 一种结合标定的摄像头主动对位方法 |
| CN113284189A (zh) * | 2021-05-12 | 2021-08-20 | 深圳市格灵精睿视觉有限公司 | 畸变参数标定方法、装置、设备及存储介质 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101053506B1 (ko) * | 2009-12-16 | 2011-08-03 | (주) 에투시스템 | 어안 렌즈를 구비하는 카메라 모듈에 의해 획득된 영상의 왜곡 보정을 위한 파라미터 조정 방법 |
-
2013
- 2013-06-28 KR KR20130075311A patent/KR101482645B1/ko active IP Right Grant
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107525652A (zh) * | 2016-06-22 | 2017-12-29 | 北京疯景科技有限公司 | 镜头畸变测试方法、装置及系统 |
| CN107525652B (zh) * | 2016-06-22 | 2021-05-04 | 北京疯景科技有限公司 | 镜头畸变测试方法、装置及系统 |
| CN109443697A (zh) * | 2018-09-29 | 2019-03-08 | 歌尔股份有限公司 | 光学中心测试方法、装置、系统和设备 |
| CN109712058A (zh) * | 2018-12-03 | 2019-05-03 | 深圳前海达闼云端智能科技有限公司 | 数据集采集器 |
| KR102167828B1 (ko) * | 2019-06-13 | 2020-10-20 | 주식회사 넥스트칩 | 왜곡 영상을 보정하는 방법 및 장치 |
| WO2020251129A1 (ko) * | 2019-06-13 | 2020-12-17 | 주식회사 넥스트칩 | 왜곡 영상을 보정하는 방법 및 장치 |
| CN112288822A (zh) * | 2020-09-22 | 2021-01-29 | 苏州艾微视图像科技有限公司 | 一种结合标定的摄像头主动对位方法 |
| CN113284189A (zh) * | 2021-05-12 | 2021-08-20 | 深圳市格灵精睿视觉有限公司 | 畸变参数标定方法、装置、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101482645B1 (ko) | 2015-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107577988B (zh) | 实现侧方车辆定位的方法、装置及存储介质、程序产品 | |
| KR101482645B1 (ko) | Fov왜곡 보정 모델에 2d패턴을 적용한 왜곡중심 보정 방법 | |
| KR101666959B1 (ko) | 카메라로부터 획득한 영상에 대한 자동보정기능을 구비한 영상처리장치 및 그 방법 | |
| JP6663040B2 (ja) | 奥行き情報取得方法および装置、ならびに画像取得デバイス | |
| CN106960454B (zh) | 景深避障方法、设备及无人飞行器 | |
| JP6354425B2 (ja) | 車載カメラの取り付け姿勢検出方法およびその装置 | |
| US10909395B2 (en) | Object detection apparatus | |
| JP2018519696A (ja) | 画像の線からのカメラの外部パラメータ推定 | |
| JP5672112B2 (ja) | ステレオ画像較正方法、ステレオ画像較正装置及びステレオ画像較正用コンピュータプログラム | |
| Ding et al. | A robust detection method of control points for calibration and measurement with defocused images | |
| JP2016200557A (ja) | 校正装置、距離計測装置及び校正方法 | |
| JP5539250B2 (ja) | 接近物体検知装置及び接近物体検知方法 | |
| Jung et al. | Object detection and tracking-based camera calibration for normalized human height estimation | |
| WO2015015542A1 (ja) | 車載ステレオカメラシステム及びそのキャリブレーション方法 | |
| KR101597163B1 (ko) | 스테레오 카메라 교정 방법 및 장치 | |
| TWI499999B (zh) | The 3D ring car image system based on probability calculation and its obtaining method | |
| JP2014092922A (ja) | 検出装置、検出方法及び検出プログラム | |
| JP5727969B2 (ja) | 位置推定装置、方法、及びプログラム | |
| CN102968784B (zh) | 一种多视角拍摄进行孔径合成成像方法 | |
| KR101239671B1 (ko) | 렌즈에 의한 왜곡 영상 보정방법 및 그 장치 | |
| EP3136340A1 (en) | Method for estimating a unified projection model for a camera and apparatus performing the same | |
| EP4016444A1 (en) | Method for rectification of images and/or image points, camera-based system and vehicle | |
| JP2018205008A (ja) | カメラキャリブレーション装置およびカメラキャリブレーション方法 | |
| TWM486116U (zh) | 以機率方式計算爲基礎之3d環車影像系統 | |
| Park et al. | Distortion center estimation technique using the FOV model and 2D patterns |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| N231 | Notification of change of applicant | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20180105 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20190108 Year of fee payment: 5 |
|
| FPAY | Annual fee payment |
Payment date: 20200107 Year of fee payment: 6 |