KR20130092189A - 촉각 전달 장치 및 방법 - Google Patents
촉각 전달 장치 및 방법 Download PDFInfo
- Publication number
- KR20130092189A KR20130092189A KR1020120013766A KR20120013766A KR20130092189A KR 20130092189 A KR20130092189 A KR 20130092189A KR 1020120013766 A KR1020120013766 A KR 1020120013766A KR 20120013766 A KR20120013766 A KR 20120013766A KR 20130092189 A KR20130092189 A KR 20130092189A
- Authority
- KR
- South Korea
- Prior art keywords
- tactile
- skin
- human body
- mechanical link
- unit
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 28
- 230000005540 biological transmission Effects 0.000 claims description 86
- 230000015541 sensory perception of touch Effects 0.000 claims description 41
- 230000033001 locomotion Effects 0.000 claims description 32
- 230000035807 sensation Effects 0.000 claims description 16
- 229920001746 electroactive polymer Polymers 0.000 claims description 8
- 238000005259 measurement Methods 0.000 claims description 5
- 238000002716 delivery method Methods 0.000 claims 4
- 239000013598 vector Substances 0.000 abstract description 6
- 210000003811 finger Anatomy 0.000 description 14
- 238000010586 diagram Methods 0.000 description 4
- 210000003813 thumb Anatomy 0.000 description 4
- 210000000056 organ Anatomy 0.000 description 3
- 238000001356 surgical procedure Methods 0.000 description 3
- 210000000988 bone and bone Anatomy 0.000 description 2
- 210000005224 forefinger Anatomy 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 241000282412 Homo Species 0.000 description 1
- 206010044565 Tremor Diseases 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000007794 irritation Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000001519 tissue Anatomy 0.000 description 1
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/02—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy
- B06B1/06—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency making use of electrical energy operating with piezoelectric effect or with electrostriction
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B06—GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS IN GENERAL
- B06B—METHODS OR APPARATUS FOR GENERATING OR TRANSMITTING MECHANICAL VIBRATIONS OF INFRASONIC, SONIC, OR ULTRASONIC FREQUENCY, e.g. FOR PERFORMING MECHANICAL WORK IN GENERAL
- B06B1/00—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency
- B06B1/18—Methods or apparatus for generating mechanical vibrations of infrasonic, sonic, or ultrasonic frequency wherein the vibrator is actuated by pressure fluid
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/02—Sensing devices
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B6/00—Tactile signalling systems, e.g. personal calling systems
Abstract
촉각 전달 장치 및 방법이 제공된다. 촉각 전달 장치는, 메커니컬 링크(Mechanical Link)의 위치를 측정하는 위치 측정 유닛, 및 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 촉각을 인체의 피부에 전달하는 촉각 전달 유닛을 포함할 수 있다.
Description
공간 상의 위치를 측정할 수 있는 장치에 인간의 손가락에 질감을 전달하는 장치를 부착함에 따라, 촉각을 전달하는 장치 및 방법에 관한 것이다. 보다 특정하게는 힘 벡터, 질감 등의 피드백 정보를 물리적인 움직임으로 표현하여 인간의 촉각 기관에 전달하기 위한 장치 및 방법에 관한 것이다.
일반적으로, 힘이나 촉각을 전달하는 기술을 햅틱(haptic) 피드백이라고도 한다. 이때, 로봇에 작용하는 힘을 인간의 손가락에 세밀하게 전달할수록 로봇을 정교하게 조작할 수 있다. 상세하게는, 햅틱 피드백은, 가상 공간 내에서 오브젝트(object)를 직관적으로 조작하거나, 또는 원거리에서 로봇을 조작할 때, 실제와 비슷하게 모사하기 위해 인위적인 감각을 생성하여 전달하는 것을 의미한다.
예를 들어, 수술 로봇의 경우, 로봇의 조작을 사람이 수행하는 경우, 일방향(uni-directional) 힘의 전달에 의해, 현재 로봇에 가해지고 있는 장력(tension)이나 부하량(load), 기타 힘을 대표하는 물리량이 상기 조작자인 사람에게 촉각의 형태로 피드백 되지는 못하고 있다.
이처럼, 종래의 키네스틱(Kinesthetic) 장치로는 로봇에 발생하는 힘 이외에 로봇이 주변 환경에 위치하는 특정 오브젝트에 닿아 발생하는 질감 등을 조작자인 사람에게 전달하지 못하여 안정성이 저하된다.
이에 따라, 로봇이 주변 환경에 위치하는 특정 오브젝트와 접촉시에 생성되는 질감, 힘 등을 조작자인 사람에게 촉각의 형태로 피드백하여 안정성을 향상시킬 수 있는 기술이 필요하다.
본 촉각 전달 장치는, 메커니컬 링크(Mechanical Link)의 위치를 측정하는 위치 측정 유닛, 및 상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 촉각을 인체의 피부에 전달하는 촉각 전달 유닛을 포함할 수 있다.
또한, 촉각 전달 유닛은, 상기 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크에 부착되어 상기 촉각을 전달할 수 있다.
또한, 상기 메커니컬 링크에 부착되며, 집게 동작을 하는 동작 조정 유닛을 더 포함할 수 있다.
또한, 상기 촉각 전달 유닛은, 상기 동작 조정 유닛에 포함된 집게의 바깥면 부착되어 상기 촉각을 전달할 수 있다.
또한, 상기 촉각 전달 유닛은, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 상기 촉각을 전달 할 수 있다.
또한, 상기 촉각 전달 유닛은, 피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 상기 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직일 수 있다.
또한, 상기 촉각 전달 유닛은, 상기 적어도 하나의 핀을 움직여서 오브젝트(object)에 작용하는 힘, 움직임, 질감, 및 표면 형상 중 적어도 하나를 상기 인체의 피부에 전달할 수 있다.
또한, 상기 촉각 전달 유닛은, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 기구(Balloon)의 공압(Pneumatic)을 조절함에 따라 상기 촉각을 전달할 수 있다.
또한, 상기 촉각 전달 유닛은, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달할 수 있다.
또한, 상기 촉각 전달 유닛은, 원격 제어 수술 로봇의 집게 동작에 따라 발생하는 힘을 상기 인체의 피부에 전달할 수 있다.
또한, 촉각 전달 방법은, 메커니컬 링크(Mechanical Link)의 위치를 측정하는 단계, 및 상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 상기 촉각을 인체의 피부에 전달하는 단계를 포함할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크에 부착된 촉각 전달 유닛을 이용하여 상기 촉각을 전달할 수 있다.
또한, 상기 메커니컬 링크에 부착된 조정 유닛을 이용하여 집게 동작을 하는 단계를 더 포함할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 조정 유닛에 포함된 집게의 바깥면 부착되어 상기 촉각을 전달할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 상기 촉각을 전달할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 상기 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직일 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 적어도 하나의 핀을 움직여서 오브젝트(object)에 작용하는 힘, 움직임, 질감, 및 표면 형상 중 적어도 하나를 상기 인체의 피부에 전달할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 기구(Balloon)의 공압(Pneumatic)을 조절함에 따라 상기 촉각을 전달할 수 있다.
또한, 상기 촉각을 인체의 피부에 전달하는 단계는, 상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달할 수 있다.
또한, 제상기 촉각을 인체의 피부에 전달하는 단계는, 상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도에 기초하여 키네스틱 피드백(K 및 텍타일 피드백 중 적어도 하나를 인체의 피부에 전달할 수 있다.
본 발명에 따르면, 원거리의 로봇이나, 가상 공간 내에 위치하는 오브젝트(object)의 조작에 따른 힘 벡터, 질감 등의 피드백 정보를 인간의 손가락이나 피부에 세밀하게 전달하여 촉각 피드백을 제공할 수 있다.
또한, 인체의 피부에 촉각을 전달함에 따라, 로봇 또는 오브젝트를 이용한 작업의 효율성과 안전성을 향상시킬 수 있다.
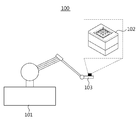
도 1은 촉각 전달 유닛을 포함하는 촉각 전달 장치를 도시한 도면이다.
도 2는 도 1의 촉각 전달 장치에 포함된 액츄에이터를 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
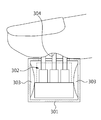
도 3은 도 1의 촉각 전달 장치에 포함된 공압을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 4는 도 1의 촉각 전달 장치에 포함된 진동을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
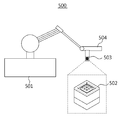
도 5는 동작 조정 유닛에 부착된 촉각 전달 유닛을 포함하는 촉각 전달 장치를 도시한 도면이다.
도 6은 도 5의 동작 조정 유닛의 사시도이다.
도 7은 수술 로봇을 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
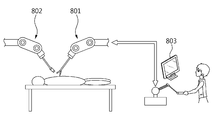
도 8은 수술 로봇 및 카메라를 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
도 9는 도 1의 촉각 전달 장치에서 인체의 피부에 촉각을 전달하는 동작을 설명하기 위해 제공되는 흐름도이다.
도 2는 도 1의 촉각 전달 장치에 포함된 액츄에이터를 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 3은 도 1의 촉각 전달 장치에 포함된 공압을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 4는 도 1의 촉각 전달 장치에 포함된 진동을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 5는 동작 조정 유닛에 부착된 촉각 전달 유닛을 포함하는 촉각 전달 장치를 도시한 도면이다.
도 6은 도 5의 동작 조정 유닛의 사시도이다.
도 7은 수술 로봇을 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
도 8은 수술 로봇 및 카메라를 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
도 9는 도 1의 촉각 전달 장치에서 인체의 피부에 촉각을 전달하는 동작을 설명하기 위해 제공되는 흐름도이다.
이하, 본 발명의 실시예를 첨부된 도면을 참조하여 상세하게 설명한다.
도 1은 촉각 전달 유닛을 포함하는 촉각 전달 장치를 도시한 도면이다.
도 1에 따르면, 촉각 전달 장치(100)는 위치 측정 유닛(101) 및 촉각 전달 유닛(102)을 포함할 수 있다.
위치 측정 유닛(101)은 하나 이상의 메커니컬 링크(Mechanical Link)를 포함하며, 메커니컬 링크의 위치를 측정할 수 있다. 예를 들어, 위치 측정 유닛(101)은 하나 이상의 메커니컬 링크 중 손잡이 유닛의 위치를 측정할 수 있다. 여기서, 메커니컬 링크는 모터(motor) 및 엔코더(encoder)가 포함된 유닛이며, 위치 측정 유닛(101)은 모터 및 엔코더를 이용하여 메커니컬 링크의 회전 각도 및 공간 상에서 메커니컬 링크의 위치를 측정할 수 있다. 예를 들어, 위치 측정 유닛(101)은 각 메커니컬 링크의 3차원 위치를 측정할 수 있다.
촉각 전달 유닛(102)은 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 촉각을 인체의 피부에 전달할 수 있다. 이때, 촉각 전달 유닛(102)은 메커니컬 링크의 손잡이 유닛의 위치 및 메커니컬 링크의 손잡이 유닛의 회전 각도에 기초하여 촉각을 인체의 피부에 전달할 수 있다.
예를 들어, 가상의 공간 또는 원격에 위치하는 오브젝트가 주변 환경에 위치하는 사물 또는 사람과 부딪히는 접촉이 발생한 경우, 촉각 전달 유닛(102)은 접촉이 발생할 때 오브젝트에 작용하는 힘, 움직임, 질감, 및 표면 형상 등을 인체의 피부에 촉각으로 전달할 수 있다. 여기서, 오브젝트는, 원격에 위치하는 로봇, 가상 공간에 존재하는 다양한 종류의 오브젝트를 모두 의미할 수 있다.
그리고, 촉각 전달 유닛(102)은 위치 측정 유닛(101)에 포함된 적어도 하나의 메커니컬 링크에 부착될 수 있다. 예를 들어, 촉각 전달 유닛(102)은 위치 측정 유닛(101)에 포함된 메커니컬 링크들 중 마지막 메커니컬 링크(103)에 부착될 수 있다. 여기서, 마지막 메커니컬 링크(103)는 로봇(robot)과 같은 오브젝트의 동작을 조정하기 위해 사람이 잡는 손잡이 부분일 수 있다.
그리고, 촉각 전달 유닛(102)은 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 촉각을 전달할 수 있다. 이때, 촉각 전달 유닛(102)은, 피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직일 수 있다. 이외에, 촉각 전달 유닛(102)은 액츄에이더 또는 전기 활성 고분자 대신 기구(Balloon)의 공압(Pneumatic)을 조절하여 촉각을 전달할 수도 있다.
도 2는 도 1의 촉각 전달 장치에 포함된 액츄에이터를 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 2에 따르면, 촉각 전달 유닛(200)은 고정부(201), 가동부(202), 제1 구동부(203), 제2 구동부(204), 및 제3 구동부(205)를 포함할 수 있다.
고정부(201)는 가동부(202) 및 구동부(203)를 둘러싸고 있는 형태의 바디(body)로서, 가동부(202)의 움직임 범위를 제한할 수 있다.
가동부(202)는 고정부(201) 내에서 움직여서 사람의 피부에 촉각을 전달할 수 있다. 예를 들어, 가동부(202)는 수평 방향(X축 방향), 수직 방향(Y축 방향), 및 전후 방향(Z축 방향) 중 적어도 하나의 방향으로 움직일 수 있다. 그러면, 가동부(202)의 접촉면은 손가락의 안쪽면과 같이 사람의 피부에 접해서 촉각을 전달할 수 있다.
제1 내지 제3 구동부(203~205)는 입력 신호에 기초하여 가동부(202)가 적어도 하나의 방향으로 움직이도록 제어할 수 있다. 여기서, 입력 신호는, 원격 조정(tele-operation) 시 오브젝트(object)에 작용하는 부하량(load)을 포함하는 피드백 신호일 수 있다. 예를 들어, 입력 신호는, 오브젝트에 작용하는 힘, 움직임, 질감, 및 표면 형상에 해당하는 신호를 포함할 수 있다.
제1 구동부(203)는 수평 방향, 제2 구동부(204)는 수직 방향, 제3 구동부(205)는 전후 방향으로 가동부(202) 및 핀 어레이의 움직임을 동시에 제어하여 보다 세밀하고, 현실감 있게 사람의 피부에 촉각 자극을 발생시킬 수 있다.
먼저, 제1 구동부(203)는 입력 신호에 기초하여 가동부(202)의 수평 방향에 대한 움직임을 제어할 수 있다. 이때, 제1 구동부(203)는 피에조 모터(Piezo Motor)를 이용하여 가동부(202)를 좌/우 수평 방향으로 움직일 수 있다.
예를 들어, 오브젝트가 좌측 또는 우측 방향으로 움직인 경우, 입력 신호는 오브젝트의 움직임 속도 및 움직임 방향을 나타내는 움직임 벡터를 포함할 수 있다. 그러면, 제1 구동부(203)는 입력 신호에 기초하여 가동부(202)를 좌측 또는 우측 방향으로 움직임 속도에 따라 움직일 수 있다. 그러면, 가동부의 접촉면과 핀 어레이를 형성하는 각 핀의 접촉면이 손가락의 안쪽면(206)에 접해서 오브젝트에 작용하는 움직임을 사람의 피부에 전달할 수 있다.
제2 구동부(204)는 적어도 하나의 핀으로 형성된 핀 어레이(pin array)를 포함하며, 가동부(202) 내에 삽입된 형태를 가질 수 있다. 이때, 핀 어레이를 형성하는 각 핀은 독립적으로 움직일 수 있다. 그리고, 제2 구동부(204)는 제3 구동부(205)의 상단에 위치하며, 입력 신호에 기초하여 위/아래 수직 방향으로 각 핀의 움직임을 제어할 수 있다.
일례로, 오브젝트가 울퉁불퉁한 면을 꾹 누르는 경우, 입력 신호는 울퉁불퉁한 면에 해당하는 질감과 누르는 힘에 해당하는 힘 벡터를 포함할 수 있다. 그러면, 제2 구동부(204)는 오브젝트로부터 전달받은 입력 신호에 기초하여 핀 어레이를 형성하는 각 핀을 서로 다른 높낮이로 움직일 수 있다. 그러면, 각 핀의 접촉면은, 서로 다른 높낮이로 손가락의 안쪽면(206)에 접해서 오브젝트에 작용하는 울퉁불퉁한 질감, 힘, 그리고 표면 형상을 사람의 피부에 전달할 수 있다.
다른 예로, 오브젝트가 좌측 위에서 우측 아래 방향으로 경사진 면을 a의 속도로 우측 방향으로 움직이는 경우, 제1 구동부(203)는 입력 신호에 기초하여 가동부(202)를 우측 방향으로 움직이고, 제2 구동부(204)는 입력 신호에 기초하여 각 핀의 높낮이를 움직일 수 있다. 예를 들어, 핀 어레이를 형성하는 각 핀의 높이는 우측 방향으로 갈수록 낮을 수 있다. 이때, 제1 구동부(203)와 제2 구동부(204)는 가동부(202)와 핀 어레이를 동시에 움직일 수 있다. 예를 들어, 가동부(202)가 우측 방향으로 a속도로 움직인 경우, 가동부(202)의 움직임에 대응하여 핀 어레이의 접촉 면은 우측 방향으로 a속도로 움직이면서 점점 높이가 낮아지면서 손가락의 안쪽면(206)에 접해져, 오브젝트에 작용하는 수직 및 수평 방향의 움직임, 힘, 경사면 등을 사람의 피부에 동시에 전달할 수 있다.
제3 구동부(205)는 입력 신호에 기초하여 전후 방향으로 가동부(202)의 움직임을 제어할 수 있다. 이때, 제3 구동부(205)는 가동부(202)의 하단, 제1 구동부(203)의 상단에 위치하며, 하나 이상의 피에조 모터를 이용하여 가동부(202)를 움직일 수 있다.
일례로, 오브젝트가 대각선 방향으로 이동한 경우, 제1 구동부(203)는 입력 신호에 기초하여 수평 방향으로 가동부(202)를 움직이고, 제3 구동부(205)는 입력 신호에 기초하여 전후 방향으로 가동부(202)를 움직일 수 있다. 이때, 제1 구동부(205)와 제3 구동부(205)는 가동부(202)를 동시에 수형 및 전후 방향으로 움직임에 따라, 오브젝트에 작용하는 대각선 방향의 움직임을 사람의 피부에 전달할 수 있다.
이상에서 설명한 바와 같이, 도 1의 촉각 전달 장치(100)는 위치 측정 유닛에 부착된 촉각 전달 유닛을 이용함에 따라, 키네스틱 피드백(Kinesthetic Feedback)뿐만 아니라, 텍타일(Tactile Feedback) 피드백을 인체의 피부에 전달할 수 있다. 다시 말해, 촉각 전달 장치(100)는 오브젝트에 작용하는 힘과 움직임뿐만 아니라, 질감과 표면 형상을 인체의 피부에 촉각 전달할 수 있다.
도 3은 도 1의 촉각 전달 장치에 포함된 공압을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 3 따르면, 촉각 전달 유닛(300)은 고정부(301), 가동부(302), 구동부(303)를 포함할 수 있다. 도 3의 촉각 전달 유닛은, 도 2의 촉각 전달 유닛에서, 수평 및 전후 방향으로 가동부의 움직임을 제어하기 위해 피에조 모터를 사용한 것 대신 기구(balloon)를 사용한 형태이다. 그러면, 촉각 전달 유닛(300)은 메커니컬 링크의 위치 및 회전 각도에 기초하여 생성된 입력 신호에 다라 기구(Balloon)의 공압(Pneumatic)을 조절하여 인체의 피부에 촉각을 전달할 수 있다.
구동부(303)는 입력 신호에 기초하여 기구의 공압(Pneumatic)을 조절하여 가동부(302)를 좌/우 수평 방향 및 앞/뒤 전후 방향으로 움직일 수 있다. 이때, 구동부(304)는 고정부(301)의 안쪽면에 접하여 위치할 수 있다.
예를 들어, 입력 신호에 기초하여 공기 주입 장치를 통해 기구의 공기 주입관으로 공기가 주입될 수 있다. 그러면, 기구는 점점 부풀어 올라서 가동부(302)에 힘을 전달할 수 있다. 이에 따라, 가동부(302)는 힘이 전달된 방향으로 움직일 수 있다. 이러한 움직임이 손가락의 안쪽면(304)을 접하고 있는 가동부(302) 및 핀 어레이의 접촉면을 통해 촉각 자극을 발생시킬 수 있다.
이처럼, 구동부(303)는 사면에 위치하는 각 기구의 공압을 조절하여 가동부(302)에 힘을 전달함에 따라, 가동부(302)를 수평 방향 및 전후 방향으로 움직일 수 있다.
도 4는 도 1의 촉각 전달 장치에 포함된 진동을 이용한 촉각 전달 유닛의 구성을 도시한 단면도이다.
도 4에 따르면, 촉각 전달 유닛(400)은 고정부(401), 가동부(402), 제1 구동부(403) 제2 구동부(404), 제3 구동부(405), 및 진동부(406)를 포함할 수 있다. 여기서, 촉각 전달 유닛(400)은, 중간 매개체(407)를 더 포함할 수도 있다.
도 4에서, 고정부(401), 가동부(402), 제1 구동부(403) 제2 구동부(404), 제3 구동부(405)의 동작은 고정부(201), 가동부(202), 제1 구동부(203), 제2 구동부(204), 및 제3 구동부(205)의 동작과 동일하므로 중복되는 설명은 생략하기로 한다.
진동부(406)는 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달할 수 있다. 이때, 진동부(406)는 메커니컬 링크의 위치 및 회전 각도에 기초하여 생성된 입력 신호에 따라 가동부(402)에 진동을 전달하며, 고정부(401)의 바깥면에 접하여 위치할 수 있다. 예를 들어 진동부(406)는 고정부(401)의 바깥 4면 중 하나 이상에 접하여 위치할 수 있다.
이때, 진동부(406)는 진동체를 이용하여 고주파 영역의 진동을 발생시켜 손가락의 안쪽면(406)에 진동감을 전달할 수 있다.
예를 들어, 오브젝트가 특정 표면에 닿는 경우와 같이, 힘 벡터가 매우 작아서 핀 어레이의 높낮이 조절만으로 사람의 피부에 촉각을 발생시키기 어려운 경우, 진동부(406)는 미세한 진동을 발생시켜 손가락의 안쪽면(406)에 전달함으로써, 매우 작은 힘의 세기에 대한 촉각 자극을 발생시킬 수 있다. 그리고, 진동부(406)는 진동을 이용하여 오브젝트에 닿는 특정 표면의 재질뿐만 아니라 표면의 미세한 변화를 사람의 피부에 전달할 수 있다.
이때, 진동부(406)는 제1 구동부(402), 제2 구동부(403), 및 제3 구동부(404)에서 가동부(402) 및 핀 어레이의 수평, 수직, 전후 방향에 대한 움직임을 제어할 때 동시에 진동을 발생시킬 수 있다. 이에 따라, 진동부(406)는 오브젝트에 작용하는 수평, 수직, 전후 방향의 미세한 변화를 사람의 피부에 전달할 수 있다.
도 5는 동작 조정 유닛에 부착된 촉각 전달 유닛을 포함하는 촉각 전달 장치를 도시한 도면이다.
도 5에 따르면, 촉각 전달 장치(500)는 위치 측정 유닛(501), 촉각 전달 유닛(502), 및 동작 조정 유닛(503)을 포함할 수 있다.
도 5에서, 위치 측정 유닛(501) 및 촉각 전달 유닛(502)의 동작은 도 1의 위치 측정 유닛(101) 및 촉각 전달 유닛(102)의 동작과 동일하므로 중복되는 설명은 생략하기로 한다.
동작 조정 유닛(503)은 위칙 측정 유닛(501)에 포함된 메커니컬 링크들 중 마지막 메커니컬 링크(504)에 부착되어 집게 동작을 수행할 수 있다. 예를 들어, 수술 로봇을 원격으로 제어하는 경우, 동작 조정 유닛(503)은 수술 로봇이 수술 도구의 집게를 조정할 수 있도록 집게 동작을 수행할 수 있다.
이때, 촉각 전달 유닛(102)은 동작 조정 유닛(503)에 포함된 집게의 바깥면 부착되어 촉각을 인체의 피부에 전달할 수 있다. 이때, 도 6과 같이, 촉각 전달 유닛(102)은 제1 촉각 전달 유닛(603) 및 제2 촉각 전달 유닛(604)을 포함할 수 있다.
예를 들어, 도 6을 참조하면, 동작 조정 유닛(600)은 사람이 손으로 잡을 수 있는 손잡이 유닛(601)과 사람의 엄지 손가락 및 검지 손가락에 접촉하여 집게 동작을 수행할 수 있는 집게(602)를 포함할 수 있다. 그러면, 제1 촉각 전달 유닛(603)은 사람의 검지 손가락과 접촉하는 집게의 바깥면에 부착되고, 제2 촉각 전달 유닛(604)은 사람의 엄지 손가락과 접촉하는 집게의 바깥면에 부착될 수 있다.
그리고, 제1 및 제2 촉각 전달 유닛(603, 604)은 검지와 엄지 손가락 간의 상대적 거리를 센싱하여 수술 로봇의 집게 각도를 인체의 피부에 전달할 수 있다. 예를 들어, 제1 및 제2 촉각 전달 유닛(603, 604)은 손잡이 유닛(601)에 포함된 가속도 또는 자이로 센서를 이용하여 상대적 거리를 센싱할 수 있다. 그러면, 동작 조정 유닛(600)은 센싱된 상대적 거리에 제1 및 제2 촉각 전달 유닛(603, 604) 간의 거리를 조정하여 수술 로봇의 집게 동작을 조정할 수 있다.
이때, 제1 및 제2 촉각 전달 유닛(603, 604)은 원격 제어되고 있는 수술 로봇의 집게 동작에 따라 발생하는 힘을 인체의 피부에 전달할 수 있다.
예를 들어, 수술 로봇의 수술 도구가 사람의 장기 또는 뼈 등에 닿거나, 바늘을 잡는 등의 수술 작업을 수행하는 경우, 제1 및 제2 촉각 전달 유닛(603, 604)은 텍타일 피드백을 인체의 피부에 전달할 수 있다. 다시 말해, 제1 및 제2 촉각 전달 유닛(603, 604)은 수술 로봇의 집게가 인체의 조직, 장기 또는 뼈 등에 닿았을 때 생성되는 힘 방향으로 질감, 표면 형상 등의 텍타일 피드백을 인체의 피부에 전달할 수 있다.
그리고, 제1 및 제2 촉각 전달 유닛(603, 604)은 피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 전기 활성 고분자(Electro Active Polymer), 공압(Pneumatic), 또는 진동을 이용하여 텍타일 피드백을 인체의 피부에 전달할 수 있다.
도 7은 수술 로봇을 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
도 7에 따르면, 수술 로봇(701)은 환자(702)를 수술함에 있어서, 수술 도구(703)가 주변에 위치하는 물체에 닿았는지 여부를 센싱할 수 있다. 그리고, 수술 로봇(701)은 센싱된 정보를 무선 또는 유선으로 촉각 전달 장치(704)로 전달할 수 있다.
그러면, 촉각 전달 장치(704)는 위치 측정 유닛(705)을 이용하여 수술 도구(703)의 끝 부분의 위치가 변경되도록 원격으로 조정할 수 있다. 그리고, 촉각 전달 장치(704)는 촉각 전달 유닛(706)을 이용하여 의사의 손에 수술 도구(703)의 끝에 물체가 닿음에 따라 작용하는 힘, 질감, 표면 형상 등을 의사(707)의 손가락에 촉각으로 전달할 수 있다. 이때, 의사(707)의 엄지 및 검지 손가락과 닿는 집게의 양쪽 바깥 면 각각에 위치 측정 유닛이 부착되어, 텍타일 피드백을 전달함에 따라 안전성을 높일 수 있다.
도 8은 수술 로봇 및 카메라를 이용하여 촉각을 인체의 피부에 전달하는 촉각 전달 장치의 전반적인 시스템을 도시한 도면이다.
도 8에 따르면, 수술 로봇(801)은 수술 도구를 이용하여 수술을 수행하며, 카메라가 장착된 로봇(802)은 수술 로봇(801)이 수술하는 동작을 촬영할 수 있다. 그리고, 카메라가 장착된 로봇(802)은 수술 동작이 촬영된 영상을 유선 또는 무선으로 디스플레이(803)로 전송할 수 있다. 그러면, 의사(805)는 디스플레이(803)에 표시되는 촬영 영상과 촉각 전달 유닛을 통해 전달되는 텍타일 피드백에 기초하여 수술 로봇의 수술을 원격으로 조정할 수있다.
도 9는 도 1의 촉각 전달 장치에서 인체의 피부에 촉각을 전달하는 동작을 설명하기 위해 제공되는 흐름도이다.
먼저, 901 단계에서, 촉각 전달 장치는, 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크(Mechanical Link)의 위치를 측정할 수 있다. 예를 들어, 촉각 전달 장치는 적어도 하나의 메커니컬 링크 중 손잡이 부분의 위치를 측정할 수 있다. 여기서, 메커니컬 링크는, 모터(motor) 및 엔코더(encoder)가 포함된 유닛일 수 있다. 그러면, 촉각 전달 장치는, 모터 및 엔코더를 이용하여 메커니컬 링크의 회전 각도 및 공간 상에서 메커니컬 링크의 위치를 측정할 수 있다.
이어, 902 단계에서, 촉각 전달 장치는, 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 촉각을 인체의 피부에 전달할 수 있다. 이때, 촉각 전달 장치는, 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크에 부착된 촉각 전달 유닛을 이용하여 촉각을 인체의 피부에 전달할 수 있다. 예를 들어, 촉각 전달 유닛은, 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크 중 인체의 피부와 접촉되는 링크인 마지막 메커니컬 링크에 부착될 수 있다.
한편, 촉각 전달 장치는, 메커니컬 링크에 부착된 조정 유닛을 이용하여 집게 동작을 수행할 수 있다. 그러면, 촉각 전달 유닛은, 조정 유닛에 포함된 집게의 바깥면 부착되어 촉각을 인체의 피부에 전달할 수 있다.
이때, 촉각 전달 장치는, 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 촉각을 인체의 피부에 전달할 수 있다.
일례로, 촉각 전달 장치는, 피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 촉각 전달 유닛에 포함된 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직일 수 있다. 이처럼, 촉각 전달 장치는, 적어도 하나의 핀을 움직여서 오브젝트(object)에 작용하는 힘, 움직임, 질감, 및 표면 형상 중 적어도 하나를 인체의 피부에 전달함에 따라, 키네스틱 피드백 뿐만 아니라 텍타일 피드백을 제공할 수 있다.
다른 예로, 촉각 전달 장치는, 상기 액츄에이어 이외에 기구(Balloon)의 공압(Pneumatic)을 이용하여 촉각을 인체의 피부에 전달할 수 있다. 예를 들어, 촉각 전달 장치는, 메커니컬 링크의 위치 및 회전 각도를 기초로 기구(Balloon)의 공압(Pneumatic)을 조절하여 촉각을 전달할 수 있다.
또 다른 예로, 촉각 전달 장치는, 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달할 수 있다. 이처럼, 진동을 인체의 피부에 전달함에 따라, 원격으로 제어하는 오브젝트에 작용하는 미세한 떨림 등의 움직임을 조작자의 피부에 전달할 수 있다.
본 발명의 실시 예에 따른 방법들은 다양한 컴퓨터 수단을 통하여 수행될 수 있는 프로그램 명령 형태로 구현되어 컴퓨터 판독 가능 매체에 기록될 수 있다. 상기 컴퓨터 판독 가능 매체는 프로그램 명령, 데이터 파일, 데이터 구조 등을 단독으로 또는 조합하여 포함할 수 있다. 상기 매체에 기록되는 프로그램 명령은 본 발명을 위하여 특별히 설계되고 구성된 것들이거나 컴퓨터 소프트웨어 당업자에게 공지되어 사용 가능한 것일 수도 있다.
이상과 같이 본 발명은 비록 한정된 실시예와 도면에 의해 설명되었으나, 본 발명은 상기의 실시예에 한정되는 것은 아니며, 본 발명이 속하는 분야에서 통상의 지식을 가진 자라면 이러한 기재로부터 다양한 수정 및 변형이 가능하다.
그러므로, 본 발명의 범위는 설명된 실시예에 국한되어 정해져서는 아니 되며, 후술하는 특허청구범위뿐 아니라 이 특허청구범위와 균등한 것들에 의해 정해져야 한다.
100: 촉각 전달 장치
101: 위치 측정 유닛
102: 촉각 전달 유닛
101: 위치 측정 유닛
102: 촉각 전달 유닛
Claims (22)
- 메커니컬 링크(Mechanical Link)의 위치를 측정하는 위치 측정 유닛; 및
상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 촉각을 인체의 피부에 전달하는 촉각 전달 유닛
을 포함하는 촉각 전달 장치. - 제1항에 있어서,
상기 촉각 전달 유닛은,
상기 위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크에 부착되어 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제1항에 있어서,
상기 메커니컬 링크에 부착되며, 집게 동작을 하는 동작 조정 유닛
을 더 포함하는 촉각 전달 장치. - 제3항에 있어서,
상기 촉각 전달 유닛은,
상기 동작 조정 유닛에 포함된 집게의 바깥면 부착되어 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제1항에 있어서,
상기 촉각 전달 유닛은,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제5항에 있어서,
상기 촉각 전달 유닛은,
피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 상기 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직이는 것을 특징으로 하는 3자유도 촉각 전달 장치. - 제5항에 있어서,
상기 촉각 전달 유닛은,
상기 적어도 하나의 핀을 움직여서 오브젝트(object)에 작용하는 힘, 움직임, 질감, 및 표면 형상 중 적어도 하나를 상기 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제1항에 있어서,
상기 촉각 전달 유닛은,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 기구(Balloon)의 공압(Pneumatic)을 조절함에 따라 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제1항에 있어서,
상기 촉각 전달 유닛은,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 장치. - 제1항에 있어서,
상기 촉각 전달 유닛은,
원격 제어 수술 로봇의 집게 동작에 따라 발생하는 힘을 상기 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 장치. - 메커니컬 링크(Mechanical Link)의 위치를 측정하는 단계; 및
상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도 중 적어도 하나에 기초하여 상기 촉각을 인체의 피부에 전달하는 단계
를 포함하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
위치 측정 유닛에 포함된 적어도 하나의 메커니컬 링크에 부착된 촉각 전달 유닛을 이용하여 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 메커니컬 링크에 부착된 조정 유닛을 이용하여 집게 동작을 하는 단계
를 더 포함하는 촉각 전달 방법. - 제13항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 조정 유닛에 포함된 집게의 바깥면 부착되어 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 적어도 하나의 핀(pin)을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직임에 따라 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제15항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
피에조 액츄에이터(Piezo Actuator), 초음파 액츄에이터, 또는 전기 활성 고분자(Electro Active Polymer)를 이용하여 상기 적어도 하나의 핀을 좌우 방향, 전후 방향, 및 수직 방향 중 적어도 하나의 방향으로 움직이는 것을 특징으로 하는 촉각 전달 방법. - 제15항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 적어도 하나의 핀을 움직여서 오브젝트(object)에 작용하는 힘, 움직임, 질감, 및 표면 형상 중 적어도 하나를 상기 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 기구(Balloon)의 공압(Pneumatic)을 조절함에 따라 상기 촉각을 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 메커니컬 링크의 위치 및 회전 각도에 기초하여 진동을 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
상기 메커니컬 링크의 위치 및 메커니컬 링크의 회전 각도에 기초하여 키네스틱 피드백(Kinesthetic Feedback)및 텍타일 피드백(Tactile Feedback) 중 적어도 하나를 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항에 있어서,
상기 촉각을 인체의 피부에 전달하는 단계는,
원격 제어 수술 로봇의 집게 동작에 따라 발생하는 힘을 상기 인체의 피부에 전달하는 것을 특징으로 하는 촉각 전달 방법. - 제11항 내지 제21항 중 어느 한 항의 방법을 실행하기 위한 프로그램이 기록된 컴퓨터에서 판독 가능한 기록 매체.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120013766A KR20130092189A (ko) | 2012-02-10 | 2012-02-10 | 촉각 전달 장치 및 방법 |
| US13/494,576 US20130211418A1 (en) | 2012-02-10 | 2012-06-12 | Apparatus and method for tactile feedback |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120013766A KR20130092189A (ko) | 2012-02-10 | 2012-02-10 | 촉각 전달 장치 및 방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130092189A true KR20130092189A (ko) | 2013-08-20 |
Family
ID=48946230
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120013766A KR20130092189A (ko) | 2012-02-10 | 2012-02-10 | 촉각 전달 장치 및 방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20130211418A1 (ko) |
| KR (1) | KR20130092189A (ko) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016010190A1 (ko) * | 2014-07-18 | 2016-01-21 | 주식회사 씨케이머티리얼즈랩 | 촉각 정보 제공 장치 |
| KR102016063B1 (ko) * | 2018-05-09 | 2019-08-29 | 건국대학교 글로컬산학협력단 | 복강경 그래스퍼의 촉감 압력 피드백을 제공하는 장치 및 그 구동 방법 |
| US11538315B2 (en) | 2018-08-29 | 2022-12-27 | Sony Corporation | Tactile sensation presenting device and tactile sensation presenting system |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5868794B2 (ja) * | 2012-06-22 | 2016-02-24 | 京セラ株式会社 | 触感呈示装置 |
| PT2821159T (pt) * | 2013-07-01 | 2016-11-16 | Comau Spa | Cabeça de ferramenta para realizar operações industriais com um sistema de monitorização sem fios |
| KR102201731B1 (ko) * | 2013-09-26 | 2021-01-12 | 엘지전자 주식회사 | 택타일 피드백을 발생하는 디스플레이 디바이스 및 그 제어 방법 |
| JP6233961B2 (ja) * | 2013-11-01 | 2017-11-22 | 国立大学法人東京工業大学 | 指先刺激システム |
| CN106535812B (zh) * | 2014-03-28 | 2020-01-21 | 直观外科手术操作公司 | 带有基于定量三维成像的触觉反馈的手术系统 |
| KR102387096B1 (ko) | 2014-03-28 | 2022-04-15 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 시계 내의 기기들의 정량적 3차원 시각화 |
| FR3028965B1 (fr) * | 2014-11-21 | 2018-03-02 | Dav | Dispositif de retour haptique pour vehicule automobile |
| US11376087B2 (en) | 2016-01-12 | 2022-07-05 | Intuitive Surgical Operations, Inc. | Uniform scaling of haptic actuators |
| EP3305431B1 (en) | 2016-10-10 | 2023-09-27 | Comau S.p.A. | Hemming apparatus and hemming method |
| ES2749573T3 (es) | 2017-02-23 | 2020-03-23 | Comau Spa | Robot articulado que lleva un cabezal de soldadura por resistencia eléctrica con electrodos ubicados en el mismo lado, procedimiento correspondiente de soldadura por resistencia eléctrica en un componente a soldar |
| CN112957008A (zh) * | 2021-01-29 | 2021-06-15 | 海南省妇女儿童医学中心 | 一种远程触诊设备 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5451924A (en) * | 1993-01-14 | 1995-09-19 | Massachusetts Institute Of Technology | Apparatus for providing sensory substitution of force feedback |
| WO1997020305A1 (en) * | 1995-11-30 | 1997-06-05 | Virtual Technologies, Inc. | Tactile feedback man-machine interface device |
| KR100536621B1 (ko) * | 2003-10-21 | 2005-12-14 | 한국과학기술원 | 촉감과 역감을 전달하는 마우스 인터페이스 장치 |
| EP1876505B1 (en) * | 2006-07-03 | 2010-10-27 | Force Dimension S.à.r.l | Haptic device gravity compensation |
| JP2010504127A (ja) * | 2006-09-25 | 2010-02-12 | コーニンクレッカ フィリップス エレクトロニクス エヌ ヴィ | ハプティックフィードバックを用いた医用スキャニング方法及び装置 |
| US8332072B1 (en) * | 2008-08-22 | 2012-12-11 | Titan Medical Inc. | Robotic hand controller |
| TW201317831A (zh) * | 2011-10-24 | 2013-05-01 | Chief Land Electronic Co Ltd | 三維觸覺感知回饋產生方法及手持電子裝置 |
-
2012
- 2012-02-10 KR KR1020120013766A patent/KR20130092189A/ko not_active Application Discontinuation
- 2012-06-12 US US13/494,576 patent/US20130211418A1/en not_active Abandoned
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016010190A1 (ko) * | 2014-07-18 | 2016-01-21 | 주식회사 씨케이머티리얼즈랩 | 촉각 정보 제공 장치 |
| US9965929B2 (en) | 2014-07-18 | 2018-05-08 | Ck Materials Lab Co., Ltd. | Tactile information providing device |
| KR102016063B1 (ko) * | 2018-05-09 | 2019-08-29 | 건국대학교 글로컬산학협력단 | 복강경 그래스퍼의 촉감 압력 피드백을 제공하는 장치 및 그 구동 방법 |
| US11538315B2 (en) | 2018-08-29 | 2022-12-27 | Sony Corporation | Tactile sensation presenting device and tactile sensation presenting system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20130211418A1 (en) | 2013-08-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130092189A (ko) | 촉각 전달 장치 및 방법 | |
| US11266471B2 (en) | Robotic hand controller | |
| KR101873402B1 (ko) | 3자유도 촉각 전달 장치 및 방법 | |
| US10191549B2 (en) | Multidirectional controller with shear feedback | |
| WO2018097223A1 (ja) | ロボット制御システム、機械制御システム、ロボット制御方法、機械制御方法、および記録媒体 | |
| KR101548156B1 (ko) | 촉감과 관절 저항감을 동시에 전달하는 무선 외골격 햅틱 인터페이스 장치 및 그 구성 방법 | |
| US10817056B2 (en) | Hand exoskeleton force feedback system | |
| JP2019500925A (ja) | ロボットシステム及びロボットシステムをバックドライブする方法 | |
| EP3506059A1 (en) | Systems and methods for providing haptic effects related to touching and grasping a virtual object | |
| WO2016077543A1 (en) | User- interface control using master controller | |
| WO2019099504A1 (en) | Master control device with multi-finger grip and methods therefor | |
| JP2009276996A (ja) | 情報処理装置、情報処理方法 | |
| JP6039562B2 (ja) | 3次元触覚伝達装置、方法及びシステム | |
| JP3624374B2 (ja) | 力覚呈示装置 | |
| US20210298855A1 (en) | Master control device with finger grip sensing and methods therefor | |
| WO2016077552A1 (en) | Interaction between user-interface and master controller | |
| JP2010287221A (ja) | 力覚提示装置 | |
| KR20220136456A (ko) | 컴퓨터 보조 원격조작 시스템에서의 2차 기구 제어 | |
| KR101181505B1 (ko) | 다양하고 정교한 정보전달을 위한 입력 지점과 출력 지점이 분리된 햅틱 인터페이스 | |
| Pacchierotti et al. | Cutaneous/tactile haptic feedback in robotic teleoperation: Motivation, survey, and perspectives | |
| US11048331B2 (en) | Haptic feedback device | |
| KR20230071081A (ko) | 수술 장치 및 이를 포함하는 원격 수술 시스템 | |
| KR20120069980A (ko) | 힘 벡터 전달 장치 | |
| US20160139669A1 (en) | Device for Intuitive Dexterous Touch and Feel Interaction in Virtual Worlds | |
| Pediredla et al. | Design, Analysis, and Control of a 3-DOF Novel Haptic Device Displaying Stiffness, Texture, Shape, and Shear |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |