KR20110123769A - 화상 식별자 조합 장치 - Google Patents
화상 식별자 조합 장치 Download PDFInfo
- Publication number
- KR20110123769A KR20110123769A KR1020117021098A KR20117021098A KR20110123769A KR 20110123769 A KR20110123769 A KR 20110123769A KR 1020117021098 A KR1020117021098 A KR 1020117021098A KR 20117021098 A KR20117021098 A KR 20117021098A KR 20110123769 A KR20110123769 A KR 20110123769A
- Authority
- KR
- South Korea
- Prior art keywords
- quantization
- value
- image
- dimension
- values
- Prior art date
Links
Images














































Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
- G06F16/58—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually
- G06F16/583—Retrieval characterised by using metadata, e.g. metadata not derived from the content or metadata generated manually using metadata automatically derived from the content
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/22—Matching criteria, e.g. proximity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/42—Global feature extraction by analysis of the whole pattern, e.g. using frequency domain transformations or autocorrelation
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/761—Proximity, similarity or dissimilarity measures
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/40—Scenes; Scene-specific elements in video content
- G06V20/46—Extracting features or characteristics from the video content, e.g. video fingerprints, representative shots or key frames
Abstract
조합에 사용하는 화상 식별자는, 이하의 생성 방법에 의해 생성된다. 먼저, 화상중의, 복수의 부분 영역 쌍의, 각 부분 영역에서 영역 특징량을 추출해, 부분 영역 쌍 마다, 쌍을 이루는 2개의 부분 영역의 상기 영역 특징량의 차분치를 양자화한다. 이 양자화 시에는 차분치의 절대치가 미리 결정된 규정치보다 작은 경우에는 특정의 양자화치로 양자화한다. 그리고, 부분 영역 쌍 마다 산출된 양자화치를 요소로 한 집합을 상기 화상의 식별에 사용하는 화상 식별자로서 정의한다. 화상 식별자 조합 장치는, 위에서 설명한 생성 방법으로 생성된, 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를, 상기 특정의 양자화치인 요소의 가중이 작아지도록 조합한다.
Description
[0001] 본 발명은, 화상을 식별하기 위한 (동일성을 판정하기 위한) 특징량인 화상 식별자를 이용해 화상을 조합하는 장치에 관한 것이다.
[0002] 화상 식별자는, 화상을 식별하기 위한 (동일성을 판정하기 위한) 화상 특징량이다. 어느 화상으로부터 추출한 화상 식별자와 다른 화상으로부터 추출한 화상 식별자를 비교하여, 그 비교 결과로부터, 2개의 화상이 동일한 정도를 나타내는 동일성 척도 (일반적으로는, 유사도 또는 거리라고 한다) 를 산출 할 수 있다. 또, 산출한 동일성 척도를 임계값과 비교하여, 2개의 화상이 동일한가 아닌가를 판정할 수 있다. 여기서 「2개의 화상이 동일」이란 화상 신호 (화상을 구성하는 화소의 화소 값) 의 레벨로 2개의 화상이 동일한 경우만으로 한정하지 않고, 화상의 압축 형식 (format) 의 변환, 화상의 사이즈/어스펙트비의 변환, 화상의 색조의 조정, 화상에 대한 각종 필터 처리 (선예각화, 평활화 등), 화상에 대한 국소적인 가공 (자막 중첩, 컷아웃 등), 화상의 재캡처링 등의 각종 개변 처리에 의해, 일방의 화상이 타방의 화상의 복제된 화상인 경우도 포함한다. 화상 식별자를 이용하면, 예를 들어, 화상, 또는 화상의 집합체인 동화상의 복제를 검지할 수 있기 때문에, 화상 식별자는 화상 또는 동화상의 불법 복사 검지 시스템 등에 응용할 수 있다.
[0003] 화상 식별자의 일례가, 특허문헌 1에 기재되어 있다. 도 18은, 특허문헌 1에 기재되어 있는 화상 식별자의 추출 방법을 나타내는 도면이다. 이 화상 식별자는, 복수의 차원 (도 18에서는 16 차원) 의 특징 벡터이다. 화상 (240) 내의 미리 결정된 위치의 32개의 직사각형 영역 (244) (도 18에서는 그 중 16개의 직사각형 영역이 그려져 있다) 로부터 각각 평균 휘도치를 산출해, 쌍을 이루는 직사각형 영역의 사이 (도 18에서는 쌍을 이룬 직사각형 영역이 점선 248으로 묶여 있다) 에 평균 휘도치의 차를 산출해, 16 차원의 차 벡터 (difference vector; 250) 를 획득한다. 차 벡터 (250) 에 대해 벡터 변환에 의해 합성 벡터를 생성해, 합성 벡터의 각 차원을 양자화해 얻어진 16 차원의 양자화 인덱스 벡터를 화상 식별자로 한다.
선행 기술 문헌
특허문헌
[0004] 특허문헌 1 : 일본 공표특허공보 평8-500471호
[0005] 복수의 차원의 특징 벡터로 구성되는 화상 식별자는, 차원간의 상관이 작을 수록, 특징 벡터가 가지는 정보량이 커 (용장성이 작아) 지므로, 상이한 화상을 식별할 수 있는 정도인 식별 능력이 높아진다. 반대로, 특징 벡터의 차원간의 상관이 크면, 특징 벡터가 가지는 정보량이 작아 (용장성이 커) 지므로, 식별 능력이 낮아진다. 여기서 차원간의 상관이란, 차원의 특징량의 발생의 유사성의 정도이며, 수학적으로는, 예를 들어, 각 차원의 특징량의 발생을 확률 변수로 했을 경우의, 확률 변수간의 상관계수나, 상호 정보량으로서 산출되는 값이다. 이 때문에, 복수의 차원의 특징 벡터로 구성되는 화상 식별자는, 차원간의 상관이 작아지도록 설계되야 하는 것이 바람직하다.
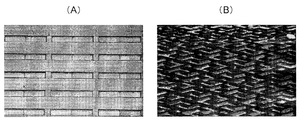
[0006] 화상 신호 (화상을 구성하는 화소의 화소 값) 는, 화상의 국소 영역간에 있어서 상관이 있다. 일반적으로, 국소 영역간의 거리가 가까울 수록, 상관은 커진다. 특히, 예를 들어, 어느 특정의 화상 패턴이 반복 출현하는 (특히 화상 패턴이 규칙적인 주기로 반복 출현하는 경우의) 화상 (예를 들어 격자 패턴으로 배치된 빌딩의 창의 화상 등, 도 19a를 참조) 이나, 어느 특정의 텍스처로 구성되어 있는 화상 (도 19b를 참조) 등은, 화상의 국소 영역간의 상관이 커진다.
[0007] [제1의 문제점]
특허문헌 1에 기재되어 있는 것 같은, 화상의 복수의 국소 영역으로부터 추출한 특징량으로 이루어지는 특징 벡터로 구성되어 있는 화상 식별자는, 화상의 국소 영역간의 상관이 큰 화상에 대해, 각 차원에 있어서 특징량을 추출하는 국소 영역의 형상이 동일하기 때문에 (특허문헌 1의 예에서는 동일한 형상의 직사각형 영역), 추출되는 특징량의 차원간의 상관이 커진다. 그 때문에, 화상 식별자 (특징 벡터) 의 식별 능력이 낮아지는 제1의 문제점이 있다. 여기서 형상이 동일하다는 것은, 영역의 크기나 각도 (기울기 (tilt) 혹은 자세 (orientation)) 도 포함해 동일하다는 것을 말하는 것임에 유의한다.
[0008] 예를 들어, 어느 특정의 화상 패턴이 반복 출현하는 화상 (도 19a 참조) 이나, 어느 특정의 텍스처로 구성되어 있는 화상 (도 19b 참조) 등에 대해서는, 특허문헌 1으로 기재되어 있는 것 같은 화상 식별자는, 식별 능력이 낮아진다.
[0009] [제2의 문제점]
특허문헌 1에 기재되어 있는 화상 식별자의 제2의 문제점은, 특징량 (특징 벡터) 을 산출하기 위한 각 차원의 영역의 형상 (크기, 각도도 포함해) 이 동일한 직사각형이기 때문에, 직사각형의 변의 길이와 같은, 혹은, 그 정수 분의 1의 주기를 가지는 주파수 성분을 검지할 수 없다고 하는, 주파수상의 맹점이 존재한다는 것이다. 그 이유는, 이 특정의 주파수의 신호 성분에 대해 영역내에서 평균을 취하면, 신호 성분의 대소에 상관없이 0이 되어 버려, 그 주파수 성분의 신호를 전혀 검지할 수 없기 때문이다. 보다 구체적으로는, 직사각형의 변의 길이와 같은 주기를 가지는 주파수를 f0이라고 가정하면, 주파수 nf0 (n=1, 2,3,…) 의 성분을 검지할 수 없게 된다. 이 때문에, 직류 성분과 이 주파수 성분에 신호가 집중 하고 있는 화상에 대해는, 화소 값의 평균치는 직류 성분과 같게 되어 버려, 영역간에서 값의 차이가 없어진다. 그 결과, 영역간의 평균 화소 값의 차로서 추출되는 모든 특징량의 값은 0이 되어 버려, 식별할 수 없게 된다 (식별 능력이 현저하게 저하한다). 실제로는, 주파수 nf0 (n=1, 2,3,…) 의 성분뿐만 아니라, 그 근방의 일정한 주파수 영역도 검지가 곤란해지기 때문에, 상기 특정 주파수에 신호 성분이 집중하고 있지 않아도, 그 주파수대의 신호 성분을 사용할 수 없게 되어서, 식별 능력이 저하한다. 이 문제를 경감하려면, 주파수 f0의 값을 크게 해, 그 검지 곤란한 주파수대에 빠지는 신호 전력을 감소시키는 것을 생각할 수 있다. 그러나, 주파수 f0의 값을 크게 하는 것은, 영역의 크기를 축소시키는 것을 의미해, 특징량의 완건성 (각종 개변 처리나 노이즈에 대해 특징량이 변화하지 않는 정도) 의 저하로 연결된다. 예를 들어, 영역이 작아지면, 작은 위치 시프트 (shift) 에 대해서도, 특징량의 값이 크게 변화하게 되어, 특징량의 완건성이 저하된다. 이와 같이, 동일한 직사각형 영역을 사용하는 경우에는, 식별 능력을 증가시키면서 완건성을 확보하는 것이 매우 어렵다.
[0010] [본 발명의 목적]
본 발명의 목적은, 위에서 설명한 문제, 즉 상이한 화상을 식별할 수 있는 정도인 식별 능력이 낮은 화상 식별자를 사용한 조합에서 조합 정밀도가 저하되는 문제를 해결할 수 있는 화상 식별자 조합 장치를 제공하는 것에 있다.
[0011] 본 발명의 한 양태에 따른 이러한 화상 식별자 조합 장치는, 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를 조합하기 위한 조합 수단을 포함한다. 제1의 이미지의 화상 식별자와 제2의 화상의 화상 식별자는, 화상중의, 복수의 부분 영역쌍의, 각 부분 영역에서 영역 특징량을 추출해, 부분 영역쌍 마다, 쌍을 이루는 2개의 부분 영역의 상기 영역 특징량의 차분치를 양자화해, 그 양자화 시에, 차분치의 절대치가 미리 결정된 값 보다 작은 경우 특정의 양자화치로 양자화해, 부분 영역쌍 마다 산출된 양자화치인 요소들의 집합을 상기 화상의 식별에 사용되는 화상 식별자로 하는, 생성 방법에 의해 생성된다. 조합 수단은 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를, 상기 특정의 양자화치를 갖는 요소의 가중이 작아지는 방식으로 조합한다.
[0012] 본 발명은 위에서 설명된 바처럼 구성되므로, 상이한 화상을 식별할 수 있는 정도인 식별 능력이 높은 화상 식별자를 이용해, 제1의 화상과 제2의 화상을 높은 정밀도로 조합할 수 있다. 특히, 화상의 국소 영역간의 상관이 큰 화상에 대해, 이 효과는 현저하다.
[0013] 또 본 발명에 의하면, 특정의 주파수에 신호가 집중되는 화상에 대해서도, 식별 능력이 저하하지 않는 화상 식별자를 이용해, 조합을 실시할 수가 있다.
[0014] [도 1] 본 발명의 제1의 실시형태의 블록도이다.
[도 2] 차원별 추출 정보가 나타난 차원마다의 추출 영역의 쌍의 예를 나타내는 도면이다.
[도 3] 본 발명의 제1의 실시형태에 있어서의 비교 수단의 일례를 나타내는 블록도이다.
[도 4] 본 발명의 제1의 실시형태에 있어서의 비교 수단의 다른 예를 나타내는 블록도이다.
[도 5] 본 발명의 제1의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 6] 본 발명의 제2의 실시형태의 주요부 블록도이다.
[도 7] 본 발명의 제2의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 8] 본 발명의 제3의 실시형태의 블록도이다.
[도 9] 차원마다의 영역 특징량 산출 방법의 예를 나타내는 도면이다.
[도 10] 본 발명의 제3의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 11] 본 발명의 제4의 실시형태를 나타내는 블록도이다.
[도 12] 차원마다의 비교 및 양자화 방법의 예를 나타내는 표이다.
[도 13] 본 발명의 제4의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 14a] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14b] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14c] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14d] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14e] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14f] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14g] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14h] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14i] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14j] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 15a] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15b] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15c] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15d] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15e] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16a] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16b] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16c] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16d] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16e] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 17a] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17b] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17c] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17d] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17e] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 18] 특허문헌 1에 기재되어 있는 화상 식별자의 추출 방법을 나타내는 도면이다.
[도 19] 국소 영역간의 상관이 커지는 화상의 예를 나타내는 도면이다.
[도 20] 단조비증가함수 f(D) 의 예를 도시한 그래프이다.
[도 21] 양자화 인덱스 벡터를 조합하는 조합 수단의 블록도이다.
[도 22] 양자화 인덱스 벡터를 조합하는 조합 수단의 처리 예를 나타내는 플로우차트이다.
[도 23] 양자화 인덱스 벡터를 조합하는 조합 수단의 다른 처리 예를 나타내는 플로우차트이다.
[도 24] 양자화 인덱스 벡터를 조합하는 조합 수단의 더욱 다른 처리 예를 나타내는 플로우차트이다.
[도 25] 양자화 인덱스 벡터를 조합하는 조합 수단의 또 더욱 다른 처리 예를 나타내는 플로우차트이다.
[도 26] 양자화 인덱스 벡터를 조합하는 조합 수단의 다른 처리 예를 나타내는 플로우차트이다.
[도 27] 화상을 세로 방향 32, 가로방향 32 으로 분할해 할 수 있는 1024개의 블록에 대해 부여되는 인덱스의 일례를 나타내는 도면이다.
[도 28a] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28b] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28c] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28d] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28e] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28f] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28g] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 29] 각 차원의 영역 타입과 차원수, 임계값에 대응하는 인덱스와의 관계를 나타내는 표이다.
[도 30a] 영역 타입 a의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30b] 영역 타입 b의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30c] 영역 타입 c의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30d] 영역 타입 d의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30e] 영역 타입 e의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30f] 영역 타입 f의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30g] 영역 타입 g의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 2] 차원별 추출 정보가 나타난 차원마다의 추출 영역의 쌍의 예를 나타내는 도면이다.
[도 3] 본 발명의 제1의 실시형태에 있어서의 비교 수단의 일례를 나타내는 블록도이다.
[도 4] 본 발명의 제1의 실시형태에 있어서의 비교 수단의 다른 예를 나타내는 블록도이다.
[도 5] 본 발명의 제1의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 6] 본 발명의 제2의 실시형태의 주요부 블록도이다.
[도 7] 본 발명의 제2의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 8] 본 발명의 제3의 실시형태의 블록도이다.
[도 9] 차원마다의 영역 특징량 산출 방법의 예를 나타내는 도면이다.
[도 10] 본 발명의 제3의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 11] 본 발명의 제4의 실시형태를 나타내는 블록도이다.
[도 12] 차원마다의 비교 및 양자화 방법의 예를 나타내는 표이다.
[도 13] 본 발명의 제4의 실시형태의 처리의 흐름을 나타내는 플로우차트이다.
[도 14a] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14b] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14c] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14d] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14e] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14f] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14g] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14h] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14i] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 14j] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 추출 영역 정보를 나타내는 표이다.
[도 15a] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15b] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15c] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15d] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 15e] 본 발명의 제5의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16a] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16b] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16c] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16d] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 16e] 본 발명의 제6의 실시형태에서 사용하는 차원별 영역 특징량 산출 방법 정보를 나타내는 표이다.
[도 17a] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17b] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17c] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17d] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 17e] 본 발명의 제5의 실시형태 및 제6의 실시형태에서 사용하는 차원별 비교 및 양자화 방법 정보를 나타내는 표이다.
[도 18] 특허문헌 1에 기재되어 있는 화상 식별자의 추출 방법을 나타내는 도면이다.
[도 19] 국소 영역간의 상관이 커지는 화상의 예를 나타내는 도면이다.
[도 20] 단조비증가함수 f(D) 의 예를 도시한 그래프이다.
[도 21] 양자화 인덱스 벡터를 조합하는 조합 수단의 블록도이다.
[도 22] 양자화 인덱스 벡터를 조합하는 조합 수단의 처리 예를 나타내는 플로우차트이다.
[도 23] 양자화 인덱스 벡터를 조합하는 조합 수단의 다른 처리 예를 나타내는 플로우차트이다.
[도 24] 양자화 인덱스 벡터를 조합하는 조합 수단의 더욱 다른 처리 예를 나타내는 플로우차트이다.
[도 25] 양자화 인덱스 벡터를 조합하는 조합 수단의 또 더욱 다른 처리 예를 나타내는 플로우차트이다.
[도 26] 양자화 인덱스 벡터를 조합하는 조합 수단의 다른 처리 예를 나타내는 플로우차트이다.
[도 27] 화상을 세로 방향 32, 가로방향 32 으로 분할해 할 수 있는 1024개의 블록에 대해 부여되는 인덱스의 일례를 나타내는 도면이다.
[도 28a] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28b] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28c] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28d] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28e] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28f] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 28g] 본 발명의 제7의 실시형태의 각 차원에 대응하는 영역 중, 1개의 타입에 속하는 영역을 나타내는 표이다.
[도 29] 각 차원의 영역 타입과 차원수, 임계값에 대응하는 인덱스와의 관계를 나타내는 표이다.
[도 30a] 영역 타입 a의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30b] 영역 타입 b의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30c] 영역 타입 c의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30d] 영역 타입 d의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30e] 영역 타입 e의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30f] 영역 타입 f의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[도 30g] 영역 타입 g의 차원의 제1, 제2의 추출 영역의 일례를 나타내는 도면이다.
[0015] [제1의 실시형태]
[제1의 실시형태의 구성]
다음으로, 본 발명의 제1의 실시형태에 대해 도면을 참조해 상세하게 설명한다.
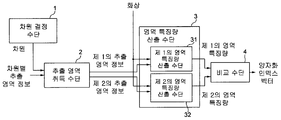
[0016] 도 1을 참조 하면, 본 발명의 제1의 실시형태에 관련된 화상 식별자 추출 장치는, 입력된 화상에 대해, 복수의 차원으로 이루어지는 특징 벡터 (보다 구체적으로는 양자화 인덱스 벡터) 를 화상 식별자로서 출력하는 시스템이다. 화상 식별자 추출 장치는, 차원 결정 수단 (1), 추출 영역 취득 수단 (2), 영역 특징량 산출 수단 (3), 및 비교 수단 (4) 를 포함한다.
[0017] 차원 결정 수단 (1) 은, 다음으로 추출하는 특징 벡터의 차원을 결정해, 추출 영역 취득 수단 (2) 에 공급한다. 차원 결정 수단 (1) 은, 추출하는 특징 벡터의 차원을 순차 공급해, 추출 영역 취득 수단 (2) 이후의 구성 요소는, 공급된 차원에 대응하는 특징량을 추출한다. 예를 들어, 특징 벡터가 N차원으로 구성되는 경우, 차원 결정 수단 (1) 은 제1 차원으로부터 제N 차원까지를 추출 영역 취득 수단 (2) 에 순차 공급해도 된다. 최종적으로 특징 벡터의 모든 차원이 공급되면, 차원의 임의의 차례로 공급될 수 있다. 복수의 차원이 병렬로 공급되어도 된다.
[0018] 추출 영역 취득 수단 (2) 에는, 차원 결정 수단 (1) 으로부터 공급된 차원과는 별도로, 입력으로서 차원별 추출 영역 정보가 공급된다.
[0019] 차원별 추출 영역 정보는, 특징 벡터의 차원마다 결부된, 제 1의 추출 영역과 제2의 추출 영역의 미리 결정된 쌍을 나타내는 정보이다. 제1 및 제2의 추출 영역은 필수 조건으로서 이하의 특징을 갖는다.
[0020] [제1 및 제2의 추출 영역의 필수 조건]
제1 및 제2의 추출 영역의 필수 조건은, 차원들 중에서 추출 영역 쌍의 상대적인 위치가 상이한 것과, 차원들 중에서 추출 영역 쌍의 형상의 편성이 상이한 것이다.
[0021] 차원별 추출 정보가 나타내는 차원들 각각에 대하여, 상기 필수 조건을 만족하는, 추출 영역의 쌍의 예를 도 2에 나타낸다. 도 18에 나타낸 화상 식별자의 추출 영역과는 상이하고, 각각의 차원들 중에서 추출 영역의 쌍의 형상의 편성이 상이하다. 여기서 상이한 형상이란, 상이한 각도의 같은 형상이나 (예를 들어, 도 2의 제1 차원의 제2의 추출 영역과 제7 차원의 제1의 추출 영역), 상이한 크기의 유사한 형상 (예를 들어, 도 2의 제1 차원의 제2의 추출 영역과 제9 차원의 제2의 추출 영역) 을 포함한다. 또한, 특징 벡터의 전차원안에, 추출 영역의 쌍이 상이한 형상의 편성을 갖는, 적어도 하나의 차원이 포함되는 것이 최저 조건이다. 추출 영역의 쌍의 형상 (의 편성) 이 서로 상이한 차원이 많을수록, 바람직하다. 이것은, 추출 영역의 쌍의 형상 (의 편성) 이 서로 상이한 차원이 많을수록, 특징 벡터의 것보다 많은 차원간의 상관이 작아져, 식별 능력이 높아지기 때문이다. 예를 들어, 특징 벡터의 모든 차원간에서, 추출 영역의 쌍의 형상이 서로 상이해도 된다.
[0022] 차원에 있어서의 제1의 추출 영역과 제2의 추출 영역은, 도 2의 제9차원과 같이, 같은 형상일 필요는 없고, 도 2의 다른 차원과 같이, 형상이 상이해도 된다. 각 차원에서의 제1의 추출 영역과 제2의 추출 영역의 형상이 차이가 나면, 제1의 추출 영역과 제2의 추출 영역으로부터 추출되는 특징량 사이의 상관이 작아져, 식별 능력이 높아진다. 따라서 이것이 바람직하다. 또, 제1의 추출 영역과 제2의 추출 영역이 동시에 같은 주파수에 관해서 맹점이 될 가능성이 낮아지기 때문에, 식별 능력이 높아진다.
[0023] 각각의 추출 영역의 형상은 임의이다. 예를 들어, 도 2의 제6 차원의 제2의 추출 영역과 같은, 임의의 복잡한 형상이 또한 허용될 수 있다. 추출 영역이 화상의 복수의 화소로 구성되는 것이면, 예를 들어, 도 2의 제7 차원이나 제10 차원과 같이, 선분이나 곡선이 또한 허용될 수 있다. 또 예를 들어, 제8 차원의 제1의 추출 영역, 제11 차원의 제1 및 제2의 추출 영역, 제12 차원의 제1의 추출 영역과 같이, 추출 영역이, 연속하지 않는 복수의 소영역으로 구성될 수도 있다. 이와 같이, 특징 벡터가 복잡한 형상의 추출 영역을 포함하면, 그로부터 추출되는 특징량의 차원간의 상관이 낮아질 수 있어서, 식별 능력이 높아질 수 있다.
[0024] 또, 예를 들어, 도 2의 제5 차원과 같이, 제1의 추출 영역과 제2의 추출 영역의 일부가 서로 중복하는 것도 가능하다. 또 추출 영역 쌍의 어느 하나가, 다른 하나에 내포될 수도 있다. 이와 같이, 추출 영역의 쌍에 중복을 허용함으로써, 보다 많은 패턴 (상대적 위치, 거리) 이 추출 영역 쌍에 취해질 수 있기 때문에, 차원간의 상관을 감소시킬 수 있는 패턴이 증가될 수 있어서, 식별 능력을 보다 높게 할 가능성이 증가한다.
[0025] 또, 도 18에 나타낸 화상 식별자의 추출 영역과는 상이하고, 도 2에 나타낸 각 차원과 같이, 차원간에서 추출 영역이 일부 서로 중복할 수도 있다. 도 18에 나타낸 화상 식별자의 추출 영역에 나타낸 바와 같이, 차원간에서 추출 영역을 배타적으로 취하면, 추출 영역 쌍의 가능한 패턴이 한정되어 버린다. 도 2에 나타낸 것처럼, 차원간에서의 추출 영역의 중복을 허용함으로써, 차원간의 상관을 감소시킬 수 있는 패턴을 늘릴 수가 있어, 식별 능력을 보다 높게 할 가능성이 증가한다. 하지만, 차원간에서의 추출 영역의 중복된 부분들이 너무 많으면, 차원간의 상관이 커져 버려, 식별 능력이 낮아진다. 따라서, 이것은 바람직하지 않다.
[0026] 또, 모든 차원의 추출 영역을 통합했을 경우에, 화상내에서 특징량이 추출되지 않는 영역이 작아지도록 (즉, 화상의 거의 전화면이 커버될 수 있음을 의미한다) 추출 영역이 취해지는 것이 바람직하다. 도 18과 같이, 화상내에서 특징량이 추출되지 않는 영역이 많이 포함되어 있으면, 화상 신호 (화상을 구성하는 화소의 화소 값) 에 포함되는 많은 정보를 사용하지 않게 되어, 식별 능력이 높아지지 않게 된다. 모든 차원의 추출 영역을 통합했을 경우에, 화상내에서 특징량이 추출되지 않는 영역이 작아지도록 (즉, 화상의 거의 전화면이 커버될 수 있음을 의미한다) 추출 영역을 취함으로써, 화상 신호에 포함되는 보다 많은 정보를 특징량에 반영할 수 있기 때문에, 식별 능력이 높아질 수 있다. 또, 모든 차원의 추출 영역을 통합했을 경우에, 추출 영역이 편향되지 않고, 화상 전체로부터 균일하게 취득되는 것이 바람직하다. 하지만, 어느 특정의 영역에 자막 중첩 등의 국소적인 가공이 수행되는 확률이 높은 경우에는, 그 영역을 피해 추출 영역을 취득하는 것이 바람직하다. 또, 화상의 에지의 주변 영역은 화상의 특징 부분을 종종 포함하지 않기 때문에, 주변 영역을 피해 추출 영역을 취득하는 것이 바람직하다.
[0027] 그 외, 추출 영역의 크기, 상대적 위치 (거리, 방향) 가 일정한 분포 (예를 들어 균일한 분포) 를 따르는 것이 바람직한데, 왜냐하면 상대적 위치 (거리, 방향) 가 균일한 분포를 따르면, 추출 영역은 거리나 방향에 대해 편향되지 않아서, 추출 영역은 특정의 거리나 방향으로 집중하는 것이 없어, 보다 많은 다양성이 이루어질 수 있기 때문이다. 또, 상대적 위치가 가까울수록, 그 영역간의 상관이 커지기 때문에, 그것을 지우기 위해서, 상대적 위치가 가까운 것 만큼 형상의 차이가 큰 편이 바람직하다.
[0028] 차원별 추출 영역 정보는, 차원마다의 제1의 추출 영역과 제2의 추출 영역이 유일하게 특정할 수 있는 정보이면, 어떠한 형식의 정보도 가능하다. 또 추출 영역은, 어떤 사이즈나 어스펙트비의 화상에 대해서도, 항상 같은 영역이어야 하기 때문에, 차원별 추출 영역 정보는, 어떤 사이즈나 어스펙트비의 화상에 대해서도, 같은 추출 영역을 취득할 수 있는 형식의 정보이어야 한다. 예를 들어, 차원별 추출 영역 정보는, 어느 미리 결정된 사이즈와 어스펙트비의 화상 (예를 들어, 가로폭 320화소×세로폭 240화소의 화상) 에 대해, 그 추출 영역의 위치 및 형상을 기술할 수도 있다. 이 경우, 어느 임의의 사이즈와 어스펙트비로 입력된 화상에 대해, 먼저 화상을 그 미리 결정된 사이즈와 어스펙트비를 갖도록 리사이즈 하고 나서, 차원별 추출 영역 정보에 기술된 추출 영역의 위치 및 형상에 따라, 추출 영역을 특정하면 된다. 반대로, 입력된 화상의 임의의 사이즈와 어스펙트비의 화상에 대응하는 차원별 추출 영역 정보에 기술된 추출 영역의 위치 및 형상을 변환해, 추출 영역을 특정 해도 된다.
[0029] 차원별 추출 영역 정보에 포함된 각각의 추출 영역을 나타내는 정보는, 어느 미리 결정된 사이즈와 어스펙트비의 화상 (예를 들어, 가로폭 320화소×세로폭 240화소의 화상) 에 대해, 추출 영역을 구성하는 모든 화소의 좌표치의 집합을 기술한 정보일 수도 있다. 또 차원별 추출 영역 정보에 포함된 각각의 추출 영역을 나타내는 정보는, 미리 결정된 사이즈와 어스펙트비의 화상에 대해, 추출 영역의 위치 및 형상을, 파라미터로 기술하는, 정보일 수도 있다. 예를 들어 추출 영역의 형태가 사각형인 경우, 정보는 사각형의 네 귀퉁이의 좌표치를 기술할 수도 있다. 또 추출 영역의 형태가 원 (circle) 인 경우, 정보는 원의 중심의 좌표치와 반경의 값을 기술할 수도 있다.
[0030] 또, 의사 난수의 종 (seed) 을 차원별 추출 영역 정보로서 사용하여, 추출 영역 취득 수단 (2) 의 내부에서 그 종으로부터 출발해 의사 난수를 발생시켜, 난수에 따라 상이한 형상의 추출 영역을 생성해 나가는 (예를 들어 난수에 따라 사각형의 네 귀퉁이가 결정된다) 방법도 채용할 수가 있다. 구체적으로는, 예를 들어 이하의 순서로, 차원별 추출 영역을 취득 할 수 있다.
(1) 의사 난수의 종이 차원별 추출 영역 정보로서 공급된다.
(2) 차원이 n=1으로 설정된다.
(3) 의사 난수를 발생시켜, 차원 n의 제1의 추출 영역의 사각형의 네 귀퉁이를 결정한다.
(4) 의사 난수를 발생시켜, 차원 n의 제2의 추출 영역의 사각형의 네 귀퉁이를 결정한다.
(5) 차원이 n=n+1으로 설정되고, 절차는 (3) 으로 돌아간다.
[0031] 난수에 기초하여 추출 영역을 결정하고 있으므로, 생성되는 추출 영역은 차원마다 상이한 형상이 된다. 또, 의사 난수의 종이 같으면, 매회 (어느 화상에 대해서도) 같은 난수가 발생되기 때문에, 상이한 화상에 대해서도 같은 추출 영역이 재현된다.
[0032] 추출 영역 취득 수단 (2) 는, 입력으로서 공급된 차원별 추출 영역 정보로부터, 차원 결정 수단 (1) 으로부터 공급된 차원에 대응하는 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보를 취득해, 추출 영역 대표치 산출 수단 (3)에 공급한다.
[0033] 영역 특징량 산출 수단 (3) 에는, 추출 영역 취득 수단 (2) 로부터의 입력 (제1의 추출 영역과 제2의 추출 영역을 나타내는 정보) 외에도, 입력으로서 화상 식별자의 추출 대상이 되는 화상이 공급된다. 영역 특징량 산출 수단 (3) 은, 제1의 영역 특징량 산출 수단 (31) 및 제2의 영역 특징량 산출 수단 (32) 를 갖는다. 영역 특징량 산출 수단 (3) 은, 제1의 영역 특징량 산출 수단 (31) 을 이용해, 입력으로서 공급된 화상으로부터, 차원마다, 추출 영역 취득 수단 (2) 로부터 공급되는 제1의 추출 영역을 나타내는 정보에 근거해, 제1의 추출 영역의 특징량을 제1의 영역 특징량으로서 산출해, 비교 수단 (4) 에 공급한다. 또, 영역 특징량 산출 수단 (3) 은, 제2의 영역 특징량 산출 수단 (32) 를 이용해, 입력으로서 공급되는 화상으로부터, 차원마다, 추출 영역 취득 수단 (2) 로부터 공급되는 제2의 추출 영역을 나타내는 정보에 근거해, 제2의 추출 영역의 특징량을 제2의 영역 특징량으로서 산출해, 비교 수단 (4) 에 공급한다.
[0034] 또한, 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보에 기초하여, 입력된 화상에 대한 각각의 추출 영역을 특정하기 위해서는, 필요에 따라 영역 특징량 산출 수단 (3) 은, 차원별 추출 영역 정보의 미리 결정된 사이즈와 어스펙트비를 갖도록 화상을 리사이즈 한다.
[0035] 영역 특징량 산출 수단 (3) 은, 각각의 추출 영역에 포함되는 화소 군의 화소 값을 이용해, 각각의 추출 영역의 영역 특징량을 산출한다. 여기서 화소 값이란, 화상의 각 화소가 가지는 신호의 값이며, 스칼라량 또는 벡터량이다. 예를 들어, 화상이 휘도 화상인 경우에는, 화소 값은 휘도치 (스칼라량) 이고, 화상이 컬러 화상의 경우에는, 화소 값은 색성분을 나타내는 벡터량이다. 예를 들어 컬러 화상이 RGB 화상인 경우는, 화소 값은 R성분, G성분, B성분의 3 차원의 벡터량이다. 또 컬러 화상이 YCbCr 화상인 경우는, 화소 값은 Y성분, Cb성분, Cr성분의 3 차원의 벡터량이다.
[0036] 추출 영역의 영역 특징량을 산출하기 위하여, 그 차원의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 을 산출하는 방법이 일정 (어느 입력 화상에 대해서도 같은 산출 방법이 사용된다) 하면, 임의의 방법이 사용될 수 있다.
[0037] 또, 산출하는 영역 특징량은, 스칼라량 또는, 벡터량일 수도 있다. 예를 들어, 화소 값이 휘도치등의 스칼라량 인 경우, 영역 특징량을, 평균치, 미디언치, 최대 빈수, 최대치, 최소치 등으로서 산출해도 된다 (모두 스칼라량이다). 또 예를 들어, 추출 영역에 포함된 화소 값을 소트 해, 분포 (소트 된 순열) 의 상위 또는 하위로부터 미리 결정된 비율의 위치에 있는 화소 값을, 영역 특징량으로서 산출해도 된다 (이것도 스칼라량이다). 보다 구체적으로, 백분율의 P%가 미리 결정된 비율인 경우 (예를 들어 P=25%) 에 대해 설명한다. 추출 영역에 포함된 합계 N개의 화소의 화소 값 (휘도치) 을 오름 순으로 소트해, 오름 순으로 소트된 화소 값 (휘도치) 의 집합을 Y(i) ={Y(0), Y(1), Y(2),…, Y(N-1) }로서 나타낸다. 여기서, 오름 순으로 소트된 순열의 하위로부터 P%의 위치에 있는 화소 값은, 예를 들어, Y(floor(N×P/100)) 가 되어, 이 값이 추출 영역의 영역 특징량으로서 획득된다. 또한, floor() 는, 소수점 이하의 잘라버림을 실시하는 함수이다. 여기서, 추출 영역에 포함된 화소의 휘도치에 대해, 이 식 (Y(floor(N×P/100))) 를 적용해 산출된 영역 특징량을, 「퍼센타일 휘도치 특징량」 이라고 부르기로 한다.
[0038] 또, 화소 값이 색성분 등의 벡터량인 경우에는, 먼저 그것들을 임의의 방법으로 스칼라량으로 변환하고 나서, 위에서 설명한 방법에 의해 영역 특징량을 산출해도 된다. 예를 들어, 화소 값이 RGB 성분의 3 차원의 벡터량인 경우는, 먼저 그것들을 스칼라량인 휘도치로 변환하고 나서, 위에서 설명한 방법에 의해 영역 특징량을 산출해도 된다. 또, 화소 값이 벡터량인 경우에는, 예를 들어, 그 추출 영역에 포함된 화소 값의 평균 벡터를 영역 특징량으로서 사용하는 것도 가능하다.
[0039] 또 예를 들어, 추출 영역에 대해 에지 검출이나, 템플릿 매칭 (template matching) 등의 임의의 연산 (미분 연산, 필터링 연산) 을 실시해, 그 연산 결과를 영역 특징량으로서 사용해도 된다. 예를 들어, 에지의 방향 (구배의 방향) 을 나타내는 2 차원의 벡터량, 또는 어느 템플릿과의 유사도를 나타내는 스칼라량일 수도 있다.
[0040] 또, 추출 영역에 포함된 색분포나, 에지의 방향 분포, 에지의 강도 분포를 나타내는 히스토그램이, 영역 특징량으로서 획득될 수도 있다 (모두 벡터량이다).
[0041] 또, ISO/IEC 15938-3에 규정된 각종 특징량이 사용될 수도 있는데, 이는, 도미넌트 컬러 (Dominant Color), 컬러 레이아웃 (Color Layout), 스케일러블 컬러 (Scalable Color), 컬러 구조 (Color Structure), 에지 히스토그램 (Edge Histogram), 호모지니어스 텍스처 (Homogeneous Texture), 텍스처 브라우징 (Texture Browsing), 영역 형상 (Region Shape), 윤곽 형상 (Contour Shape), 형상 3D(Shape 3D), 파라메트릭 모션 (Parametric Motion), 및 모션 액티비티 (Motion Activity) 를 포함한다.
[0042] 비교 수단 (4) 는, 차원마다, 영역 특징량 산출 수단 (3) 으로부터 공급된 제1의 영역 특징량과 제2의 영역 특징량을 비교해, 비교한 결과를 양자화해 취득된 양자화 인덱스를 출력한다. 비교 수단 (4) 이, 차원마다, 양자화 인덱스를 출력하므로, 최종적으로, 복수의 차원의 양자화 인덱스로 이루어지는 양자화 인덱스 벡터가 출력된다.
[0043] 비교 수단 (4) 이, 제1의 영역 특징량과 제2의 영역 특징량을 비교해, 양자화하는 임의의 방법을 사용할 수도 있다. 또, 각 차원에 대한 양자화 인덱스의 수도 임의이다.
[0044] 비교 수단 (4) 는, 예를 들어, 영역 특징량이 스칼라량 인 경우 (예를 들어 휘도치의 평균치), 그 대소를 비교해 제1의 영역 특징량이 큰 경우에는 양자화 인덱스를 +1, 그 이외의 경우에는 양자화 인덱스를 -1 로 설정해, 비교 결과를 +1와 -1의 2개 값들의 양자화 인덱스로 양자화할 수도 있다. 여기서, 차원 n의 제1의 영역 특징량을 Vn1, 제2의 영역 특징량을 Vn2와 하면, 차원 n의 양자화 인덱스 Qn는, 다음 식에서 산출할 수 있다.
[0045] [식 1]
Qn=+1 (Vn1>Vn2의 경우)
-1 (Vn1≤Vn2의 경우)
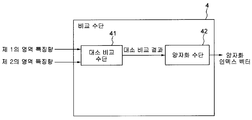
[0046] 여기서, 비교 수단 (4) 이, 위의 식 1에 근거한 비교 및 양자화를 실시하는 경우에 있어서의, 비교 수단 (4) 의 보다 상세한 구성도를 도 3에 나타낸다.
[0047] 도 3을 참조하면, 비교 수단 (4) 는, 대소 비교 수단 (41)과 양자화 수단 (42) 를 포함한다.
[0048] 대소 비교 수단 (41)은, 제1의 영역 특징량과 제2의 영역 특징량이 공급되면, 제1의 영역 특징량의 값과 제2의 영역 특징량의 값을 비교해, 그 비교 결과를 양자화 수단 (42) 에 공급한다. 이것은, 대소 비교 수단 (41) 이, Vn1와 Vn2의 대소를 비교해, 비교 결과가, Vn1>Vn2인지, 또는 Vn1≤Vn2인지를 나타내는 정보를, 대소 비교 결과로서 양자화 수단 (42) 에 공급한다.
[0049] 양자화 수단 (42) 는, 대소 비교 수단 (41) 으로부터 공급되는 대소 비교 결과에 기초하여, 식 1에 따라 양자화를 실시해, 양자화 인덱스를 출력한다. 따라서, 양자화 수단 (42) 은, 비교 결과가 Vn1>Vn2인 것을 나타내는 정보가 공급되는 경우에는, 양자화 인덱스가 +1 이 되도록 하는 한편, 비교 결과가 Vn1≤Vn2인 것을 나타내는 정보가 공급되는 경우에는, 양자화 인덱스가 -1 이 되도록 양자화 인덱스를 출력한다.
[0050] 또한, 이 식 1에 근거한 비교 및 양자화 방법을 비교 및 양자화 방법 A라고 부르기로 함에 유의한다.
[0051] 또, 비교 수단 (4) 은, 예를 들어, 영역 특징량이 스칼라량인 경우 (예를 들어 휘도치의 평균치), 차분치의 절대치가 미리 결정된 임계값 이하의 경우에는, 제1의 영역 특징량과 제2의 영역 특징량과의 사이에 차이가 없다고 판정되어, 차이가 없는 것을 나타내는 양자화 인덱스 0 이 설정되고, 그 이외의 경우에는, 비교 수단 (4) 은 그 대소를 비교해 제1의 영역 특징량 쪽이 큰 경우에는 양자화 인덱스 +1이 설정되는 한편, 그 이외의 경우에는 양자화 인덱스 -1이 설정되어서, 양자화 인덱스는 +1, 0,-1의 3개 값 중 임의의 것이 되는 방식으로 양자화를 수행할 수도 있다. 여기서, 차원 n의 제1의 영역 특징량을 Vn1, 제2의 영역 특징량을 Vn2, 그리고 미리 결정된 임계값을 th로 가정하면, 차원 n의 양자화 인덱스 Qn는, 다음 식에서 산출 할 수 있다.
[0052] [식 2]
Qn=+1 (|Vn1-Vn2|>th 또한 Vn1>Vn2 의 경우)
0 (|Vn1-Vn2|≤th 의 경우)
-1 (|Vn1-Vn2|>th 또한 Vn1≤Vn2 의 경우)
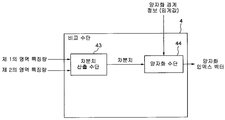
[0053] 비교 수단 (4) 이, 식 2에 근거한 비교 및 양자화를 실시하는 경우에 있어서의, 비교 수단 (4) 의 보다 상세한 구성 도를 도 4에 나타낸다.
[0054] 도 4를 참조하면, 비교 수단 (4) 은, 차분치 산출 수단 (43) 과 양자화 수단 (44) 을 포함한다. 양자화 수단 (44) 에는, 미리 결정된, 양자화의 경계를 나타내는 정보 (양자화 경계 정보) 인 임계값이, 입력으로서 미리 공급된다.
[0055] 차분치 산출 수단 (43) 은, 제1의 영역 특징량과 제2의 영역 특징량이 공급되면, 제1의 영역 특징량의 값과 제2의 영역 특징량의 값과의 사이의 차분치를 산출해, 산출한 차분치를 양자화 수단 (44) 에 공급한다. 이것은, 차분치 산출 수단 (43) 은, Vn1-Vn2를 산출해, 그 결과 값을 양자화 수단 (44) 에 공급함을 의미한다.
[0056] 양자화 수단 (44) 은, 차분치 산출 수단 (43) 으로부터 공급된 차분치와 입력으로서 공급되는 미리 결정된 양자화의 경계를 나타내는 정보 (양자화 경계 정보) 인 임계값에 기초하여, 식 2에 따라 양자화를 실시해, 양자화 인덱스를 출력한다. 이것은 양자화 수단 (42) 이, 차분치 산출 수단 (41) 으로부터 공급된 Vn1-Vn2의 값과 입력으로서 공급되는 임계값 th에 기초하여, |Vn1-Vn2|>th 또한 Vn1-Vn2>0 의 경우에는 양자화 인덱스가 +1, |Vn1-Vn2|>th 또한 Vn1-Vn2≤0의 경우에는 양자화 인덱스가 -1, 그리고 |Vn1-Vn2|≤th 의 경우에는 양자화 인덱스가 0 으로 설정되는 방식으로 양자화 인덱스를 출력한다.
[0057] 또한, 이 식 2에 근거한 비교 및 양자화 방법을 이하에서 비교 및 양자화 방법 B라고 부르기로 한다.
[0058] 여기서는 차분치에 기초하여 3개 값들에서 양자화가 수행되지만, 차분치의 크기에 따라, 보다 다수의 (레벨의) 양자화 인덱스에서 양자화를 수행하는 것이 가능하다. 이 경우도, 비교 수단 (4) 는, 도 4에 나타낸 구성을 가져, 양자화 수단 (44) 에는, 각 레벨의 양자화의 미리 결정된 경계를 나타내는 정보 (양자화 경계 정보) 로서의 복수의 임계값이 입력으로서 공급된다. 또한, 이 차분치와 입력으로서 공급된 복수의 임계값에 기초하여, 4 레벨 이상으로 양자화하는 비교 및 양자화 방법을 이하에서 비교 및 양자화 방법 C라고 부르기로 한다.
[0059] 이와 같이, 제1의 영역 특징량과 제2의 영역 특징량과의 사이의 차이가 작아서 (미리 결정된 임계값 이하이어서), 차이가 존재하지 않는 것으로 판정되는 경우에 차이가 없음을 나타내는 양자화 인덱스를 도입하는 것에 의해, 식 1의 방법에 비해, 영역 특징량 사이의 차이가 작은 추출 영역의 쌍의 차원의 특징량 (양자화 인덱스) 을 보다 안정적으로, 즉 각종 개변 처리나 노이즈에 대해 보다 강건하게 할 수 있다. 그 때문에, 국소 영역간의 특징의 차이가 전체적으로 적은, 전체적으로 변화의 적은 평탄한 화상 (예를 들어 푸른 하늘의 화상) 에 대해서도 안정적인, 즉 각종 개변 처리나 노이즈에 대해서도 강건한, 화상 식별자 (양자화 인덱스 벡터) 를 출력할 수 있다.
[0060] 또, 비교 수단 (4) 은, 예를 들어, 영역 특징량이 벡터량인 경우, 벡터량을 먼저 임의의 방법으로 스칼라량으로 변환하고 나서, 위에서 설명한 방법에 의해 양자화를 실시해도 된다 (이 비교 및 양자화 방법을 이하에서 비교 및 양자화 방법 D라고 부르기로 한다). 또 예를 들어, 제1의 추출 영역의 벡터로부터 제2의 추출 영역의 벡터와의 차인 차 벡터를 산출해, 차 벡터를 벡터 양자화해 양자화 인덱스를 산출해도 된다. 이 경우에는, 예를 들어, 각각의 양자화 인덱스에 대해 미리 결정된 대표 벡터 (중심 벡터 등) 가 공급되어 대표 벡터와 차 벡터 사이의 유사도가 가장 커 (거리가 가장 작아) 지는 양자화 인덱스로 분류된다 (이 비교 및 양자화 방법을 비교 및 양자화 방법 E라고 부르기로 한다). 또, 위에서 설명한 식 2에 의한 스칼라량의 양자화와 마찬가지로, 차 벡터의 놈 (norm) 이 미리 결정된 임계값 이하인 경우에는, 제1의 영역 특징량과 제2의 영역 특징량 사이의 차이가 없는 것으로 판정하여, 차이가 없는 것을 나타내는 양자화 인덱스 0으로서 차이가 없는 것을 나타내는 양자화 인덱스를 도입해도 된다.
[0061] 또한, 본 발명에서 출력된 양자화 인덱스 벡터를 조합 (matching) 할 때 (화상으로부터 추출한 양자화 인덱스 벡터와 다른 화상으로부터 추출한 양자화 인덱스 벡터를 비교해, 그들의 화상이 동일한가 아닌가를 판정할 때), 양자화 인덱스가 일치하는 차원수 (유사도), 혹은 양자화 인덱스가 비일치인 차원수 (해밍 거리) 를 동일성 척도로서 산출해, 산출된 동일성 척도를 임계값과 비교하여, 화상의 동일성이 판정될 수 있다.
[0062] 또, 비교 수단 (4)에 있어서, 양자화 인덱스가 식 2에 기초하여 산출된 경우에는, 이하와 같이 동일성 척도 (유사도) 를 산출 할 수 있다. 먼저, 2개의 화상의 양자화 인덱스 벡터를 대응하는 차원사이에서 서로 비교해, 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원의 수를 산출한다 (이 값을 A로 설정한다). 다음으로, 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원에 있어서, 양자화 인덱스가 일치하는 차원의 수를 산출한다 (이 값을 B로 설정한다). 그리고, 유사도를 B/A로서 산출한다. 여기서 A=0의 경우 (즉, 모든 차원에서 양쪽 모두의 양자화 인덱스가 0이 되는 경우) 는, 유사도를 미리 결정된 수치 (예를 들어 0.5) 로 설정한다.
[0063] 또, 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원에 있어서, 양자화 인덱스가 비일치하는 차원의 수를 산출해 (이 값을 C로 설정한다), 동일성 척도 (거리) 를 C/A로서 산출해도 된다. 여기서 A=0의 경우 (즉, 모든 차원에서 양쪽 모두의 양자화 인덱스가 0이 되는 경우) 는, 동일성 척도 (거리) 를 미리 결정된 수치 (예를 들어 0.5) 로 설정한다. 이 동일성 척도를 C/A로서 산출하는 방법의 효과를, 동일성 척도를 B/A로서 산출하는 방법과 대비해, 이하에 나타낸다. 여기서, B+C=A이기 때문에, B (양자화 인덱스가 일치하는 차원의 수) 를 산출해 B/A를 획득하는 것과 C (양자화 인덱스가 비일치인 차원의 수) 를 산출해 C/A를 획득하는 것과의 사이에, 화상의 동일성 판정의 정밀도에서 차이가 존재하지 않는다 (왜냐하면, B/A=1-C/A, C/A=1-B/A 여서, B/A는 동일성 척도를 「유사도」 로서 산출 하는 한편, C/A는 동일성 척도를 「거리」로서 산출하기 때문이다). 그러나, 산출된 동일성 척도를 미리 주어진 임계값과 비교해 동일성의 판정을 실시할 때에, 계산 비용을 경감하기 위해서 동일성 척도의 산출의 중단을 실시하는 경우에, 2개의 방법의 사이에 계산 비용의 차이가 발생한다. 동일성 척도의 산출의 중단은 다음과 같이 실시한다. 미리, 동일성 판정을 위한 임계값이 주어진다. 차원마다 순서대로, 양자화 인덱스가 서로 {일치·비일치} 인지를 판정해, 양자화 인덱스가 서로 {일치하는·비일치인} 차원수의 값을 산출 (증분) 해 나가, 순서대로 이 값을 임계값과 비교해 간다. 양자화 인덱스가 서로 {일치하는·비일치인} 차원수가, 임계값을 넘은 시점에서, 계산을 중지할 수가 있다 (그 이상 계산해도, 임계값을 초과한다는 것이 자명하기 때문이다). 여기서 일반적으로, 동일성 판정의 임계값은, 동일성 척도 (유사도) 를 B/A로서 산출하는 경우에는 0.5 (반) 보다 큰 값을, 동일성 척도 (거리) 를 C/A로서 산출하는 경우에는 0.5 (반) 보다 작은 값으로 설정한다 (전자의 경우에는 산출된 값이 임계값보다 크면 화상들을 동일한 것으로 판정하는 한편, 후자의 경우에는 산출된 값이 임계값보다 작으면 화상들을 동일한 것으로 판정한다). 예를 들어 B/A가 산출되는 경우에는 임계값을 0.8로 설정하고, C/A가 산출되는 경우에는 임계값을 0.2로 설정한다. 여기서 A=100으로 하면, B/A를 산출하는 경우에는 B의 값을 순서대로 계산해 나가, B의 값이 80을 넘었을 경우에 계산을 마감할 수가 있다. C/A를 산출하는 경우에는 C의 값을 순서대로 계산해 나가, C가 20을 넘었을 경우에 계산을 마감할 수가 있다. 이것은, B를 계산하는 경우에는 값이 80을 초과할 때까지 계산을 마감할 수가 없지만, C를 계산하는 경우에는 값이 20을 넘은 시점에서 계산을 마감할 수가 있음을 의미한다. 그 때문에, 동일성 척도를 C/A로서 산출하는 편이, B/A로서 산출하는 것보다도, 보다 빠른 시점에서 계산을 마감할 수 있기 때문에, 계산 비용을 경감 할 수 있는 효과가 있다.
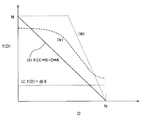
[0064] 또 여기서, 「양쪽 모두의 양자화 인덱스가 0」인 차원의 수를 D로서 산출해 (여기서 전차원수를 N이라 하면, A+D=N), 임의의, D의 단조비증가함수 f(D) 를 이용해, 동일성 척도를 B/f(D), 또는, C/f(D) 로서 산출해도 된다. 또한 D의 단조비 증가 함수 f(D) 란, D1<D2에 대해 f(D1) ≥f(D2) 가 성립되는 함수이다. D에 대한 f(D) 의 예를 도시한 그래프를 도 20에 나타낸다 (가로축은 D를 나타내고, 세로축은 f(D) 를 나타낸다). 도 20에 있어서 함수 (i) 는, f(D) =상수이며, 단순히 B 또는 C로서 산출되는 것과 같은 값을 갖는 동일성 척도를 전하고, 또 함수 (ii) 는, f(D) =N-D=A이며, B/A 또는 C/A로서 산출되는 것과 같은 값을 갖는 동일성 척도를 전한다. 여기서 f(D) 는 함수 (i) 나 함수 (ii) 와 같이 D 에 대해 선형일 필요는 없고, 그것이 D의 단조비증가함수인 한은, 그것은 함수 (iii) 나 함수 (iv) 와 같이 비선형인 함수일 수도 있다. 이와 같이, 임의의, D의 단조비증가함수 f(D) 를 이용해 동일성 척도를 B/f(D) 또는 C/f(D) 로서 산출하는 것의 효과를 이하에 말한다. 양자화 인덱스 0은, 식 2를 참조 하면, 2개의 추출 영역의 영역 특징량의 값들 사이에 차이가 없는 (임계값 이하인) 것을 나타내고 있다. 국소 영역들의 특징량들 사이의 차이가 적은, 전체적으로 변화가 적은 평탄한 화상 영역 (하늘의 영역, 흰 벽의 영역 등) 에서는, 양자화 인덱스 0의 수가 큰 경향이 있어 (예를 들어 전체적으로 평탄한 푸른 하늘의 화상에서는, 거의 모든 차원에서 양자화 인덱스가 0이 된다), 또 이와 같은 평탄한 화상 영역은 많은 화상에 포함되기 때문에, 양자화 인덱스가 0인 차원은, 2개 화상의 양자화 인덱스 벡터들을 비교하여 동일성을 판정하는데 있어서의 유효성이 낮다고 생각된다. 2개의 비교된 화상의 양자화 인덱스 벡터에서, 「양쪽 모두의 양자화 인덱스가 0」인 차원은, 2개의 화상의 양자화 인덱스 벡터를 비교해 동일성을 판정하는데 유효성이 낮은 차원이라고 생각된다. B 및 C에서, 유효성이 낮은 「양쪽 모두의 양자화 인덱스가 0」인 차원을 제외해, 유효성이 높은 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원으로 한정해, 양자화 인덱스가 일치하는 차원수 (B), 혹은 양자화 인덱스가 비일치인 차원수 (C) 로서 산출한다. 유효성이 낮은 차원을 제외하여, 유효성이 높은 차원으로 한정해 동일성 척도를 산출하는 것에 의해, 화상의 동일성을 판정하기 위한 고정밀의 조합을 실현할 수가 있다. 그리고, f(D) 는, 「양쪽 모두의 양자화 인덱스가 0」인 차원수, 즉 유효성이 낮은 차원의 수에 따라, B나 C의 값을 정규화 한다 (D가 큰 만큼 A가 작아져, B나 C의 값이 작아지기 때문에, D에 대해 단조비증가함수로 정규화된다). 여기서 정규화의 함수로서 임의의 단조비증가함수가 사용되므로, 동일성 척도의 행동을 조정 (제어) 할 수 있고, 동일성 판정을 실시하는 화상데이터베이스나, 어플리케이션에 따라 최적화할 수 있는 효과가 있다.
[0065] 이전 단락 (단락 0064) 에서 설명한 동일성 척도의 산출 방법에서, 유효성이 낮은 「양쪽 모두의 양자화 인덱스가 0」인 차원을 제외하고, 유효성이 높은 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원으로 한정해, 동일성 척도를 산출했다. 그러나 유효성이 낮은 「양쪽 모두의 양자화 인덱스가 0」인 차원을 완전하게 제외하지 않고, 「양쪽 모두의 양자화 인덱스가 0」인 차원수인 D에 대해 단조 비감소 함수 g(D) 를 이용해, 동일성 척도를 (B/f(D))+g(D) 로서 산출해도 된다. 여기서, 전반의 B/f(D) 는, 유효성이 높은 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원으로부터 산출된 동일성 척도, 후반의 g(D) 는 유효성이 낮은 「양쪽 모두의 양자화 인덱스가 0」인 차원으로부터 산출된 동일성 척도이며, 그 합으로서 전체의 동일성 척도를 정의한다. 여기서, 전반의 B/f(D) 보다 후반의 g(D) 의 영향 (가중) 이 작아지도록, 단조 비감소 함수 g(D) 를 설계하는 것에 의해, 유효성이 높은 전반의 B/f(D) 의 가중을 크게 한 형태로 동일성 척도를 산출 할 수 있다. 예를 들어 있는 작은 가중 치 β를 이용해, 동일성 척도를 (B/f(D))+β×D 로서 산출해도 된다. 게다가, f(D) =상수인 경우에, 1/f(D) =α 이면, 동일성 척도를 α×B+β×D 로서 산출해도 된다. 이와 같이, 유효성이 높은 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원과 유효성이 낮은 「양쪽 모두의 양자화 인덱스가 0」인 차원을 나누어 동일성 척도를 산출하는 것에 의해, 모든 차원을 고려하면서 (예를 들면, 유효성이 높은 차원의 가중을 크게 하는) 유효성이 높은 차원과 유효성이 낮은 차원의 상대적인 가중을 조정 (제어) 할 수 있다. 이에 의하면, 동일성 판정을 실시하는 화상데이터베이스나, 어플리케이션에 따라 최적화 할 수 있는 효과가 있다.
[0066] 또한, 단락 0062 내지 단락 0065에 있어서는, 비교하는 2개의 양자화 인덱스 벡터에 있어서, 「양쪽 모두의 양자화 인덱스가 0」인 차원 (의 수) 및 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원 (의 수) 에 기초하여 동일성 척도의 산출 방법이 설명되었지만, 「어느 한쪽의 양자화 인덱스가 0」인 차원 (의 수) 및 「어느 한쪽의 양자화 인덱스가 0」이 아닌 차원 (의 수) 에 기초하여, 동일한 계산방법에 의해 동일성 척도를 산출해도 된다. 이것은, 단락 0062 내지 단락 0065에 있어서의 「양쪽 모두의 양자화 인덱스가 0」인 차원 (의 수) 및 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원 (의 수) 을 각각, 「어느 한쪽의 양자화 인덱스가 0」인 차원 (의 수) 및 「어느 한쪽의 양자화 인덱스가 0」이 아닌 차원 (의 수) 으로 교체할 수 있음을 의미한다.
[0067] 단락 0062 내지 단락 0066에서 설명한 조합 방법 (동일성 척도의 산출 방법) 은, 양자화 인덱스가 식 2에 기초하여 산출되었을 경우로서 설명되었지만, 양자화 인덱스가 식 2에 기초하여 산출되었을 경우에 한정하지 않는다. 비교 수단 (4) 에 있어서, 2개의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 의 특징량인 제1의 영역 특징량과 제2의 영역 특징량 사이의 차이가 없는 (차이가 작은, 즉 차이가 미리 결정된 임계값 이하인) 것을 나타내는 양자화 인덱스를 도입하는 양자화 방법을 이용하고 있으면, 그러한 조합 방법이 적용될 수도 있다. 즉, 단락 0062 내지 단락 0066에 있어서의 양자화 인덱스 0을, 「제1의 영역 특징량과 제2의 영역 특징량 사이의 차이가 없는 (차이가 작은, 즉 차이가 미리 결정된 임계값 이하인) 것을 나타내는 양자화 인덱스」라고 해석하면 된다.
[0068] 단락 0061 내지 단락 0067에 있어서 설명한, 2개의 화상으로부터 추출한 양자화 인덱스 벡터를 조합하는 방법에 의해 동일성 척도를 산출하는 수단이 조합 수단이면, 조합 수단을 구성 요소로서 포함하는 화상 식별자 조합 장치를 구성하는 것이 가능하다. 조합 수단은, 비교 수단 (4)로부터 출력되는 제1의 화상의 양자화 인덱스 벡터와 제2의 화상의 양자화 인덱스 벡터를 비교해, 동일성 척도를 산출해 출력한다. 또, 화상 식별자 조합 장치는, 조합 수단에 더하여 동일성 판정 수단을 구비할 수도 있다. 동일성 판정 수단은, 조합 수단으로부터 공급된 동일성 척도를, 미리 주어지는 임계값과 대소의 비교를 해, 제1의 화상과 제2의 화상이 동일한가 아닌가를 판정해, 그 판정 결과를 출력한다.
[0069] 또한, 단락 0061 내지 단락 0068에 있어서 설명한 양자화 인덱스 벡터를 조합하는 방법은, 후술하는 모든 실시형태 (제2의 실시형태, 제3의 실시형태, 제4의 실시형태, 그 밖의 실시형태) 에 대해서도 적용할 수 있다.
[0070] [제1의 실시형태의 동작]
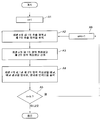
다음으로, 도 5의 플로우차트를 참조해, 제1의 실시형태에 있어서의 화상 식별자 추출 장치의 동작을 설명한다. 도 5의 플로우차트에서는, 특징 벡터의 차원 (의 수) 를 「n」으로 나타내고, 1으로부터 N까지의 합계 N 차원이 존재한다.
[0071] 먼저, 차원 결정 수단 (1) 은, 특징 벡터를 추출하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 추출 영역 취득 수단 (2) 에 공급한다 (단계 A1).
[0072] 다음으로, 추출 영역 취득 수단 (2) 은, 입력으로서 공급된 차원별 추출 영역 정보로부터, 차원 n의 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보를 취득해, 영역 특징량 산출 수단 (3) 에 공급한다 (단계 A2).
[0073] 다음으로, 영역 특징량 산출 수단 (3) 은, 입력으로서 공급되는 화상으로부터, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 산출해, 비교 수단 (4) 에 공급한다 (단계 A3).
[0074] 다음으로, 비교 수단 (4) 은, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 비교해, 비교한 결과를 양자화해, 양자화 인덱스를 출력한다 (단계 A4).
[0075] 다음으로, 모든 차원에 대해 양자화 인덱스의 출력이 종료되었는지 여부를 판정 (즉 n<N가 참인지 거짓인지를 판정) 한다 (단계A5). 모든 차원에 대해 양자화 인덱스의 출력이 종료되었을 경우 (즉 n<N가 거짓인 경우) 는 처리를 종료한다. 모든 차원에 대해 양자화 인덱스의 출력이 종료되지 않은 경우 (즉 n<N가 참인 경우) 는, 처리는 단계 A6으로 이행한다. 단계 A6에서는, 차원 결정 수단 (1) 이, 특징 벡터를 추출하기 위한 다음의 차원을 결정해 (n=n+1), 추출 영역 취득 수단 (2) 에 공급한다. 그리고, 처리는 재차 단계 A2 로 이행한다.
[0076] 또한, 여기서는, 차원 1 로부터 차원 N까지 차례로 추출 처리를 실시하고 있지만, 이 차례에 한정되지 않고 임의의 차례가 취해질 수 있다. 또 이 처리 순서에 한정하지 않고, 복수의 차원에 대한 추출 처리를 병렬로 실시하는 것도 가능하다.
[0077] [제1의 실시형태의 효과]
다음으로, 본 발명의 제1의 실시형태의 효과에 대해 설명한다.
[0078] 제1의 효과는, 복수의 차원의 특징 벡터로 구성되는 화상 식별자의, 상이한 화상을 식별할 수 있는 정도인 식별 능력을 높일 수 있다는 것이다. 특히, 화상의 국소 영역간의 상관이 큰 화상에 대해, 이 효과는 현저하다.
[0079] 그 이유는, 차원간에서 특징량을 추출하는 영역의 형상이 상이한 (영역의 형상이 다양한) 것에 따라, 차원간의 상관을 작게 할 수 있기 때문이다.
[0080] 제2의 효과는, 특정의 주파수에 신호가 집중하는 화상에 대해서도, 식별 능력이 저하되지 않을 것이라는 것이다.
[0081] 그 이유는, 차원간에서 특징량을 추출하는 영역의 형상이 상이한 (영역의 형상들이 다양한) 것에 따라, 어느 특정의 주파수에 신호가 집중하는 화상에 대해서도, 동시에 모든 (많은) 추출 영역의 쌍 (차원) 의 특징량 사이에 차이가 없어져 식별 능력이 저하되는 경우가 발생하기 어려워지기 때문이다.
[0082] [제2의 실시형태]
[제2의 실시형태의 구성]
다음으로, 본 발명의 제2의 실시형태에 대해 도면을 참조해 상세하게 설명한다.
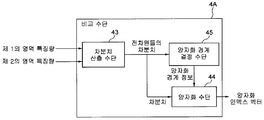
[0083] 본 발명의 제2의 실시형태는, 도 1에 나타낸 제1의 실시형태의 비교 수단 (4) 이, 도 6에 상세히 나타낸 비교 수단 (4A) 으로 교체되는 점에 있어서, 제1의 실시형태와 상이하다. 비교 수단 (4A) 이외의 성분들은, 제1의 실시형태와 같기 때문에, 여기서는 그러한 성분들에 대한 설명을 생략한다.
[0084] 도 6을 참조하면, 비교 수단 (4A) 은, 차분치 산출 수단 (43), 양자화 경계 결정 수단 (45), 및 양자화 수단 (44) 을 포함한다.
[0085] 차분치 산출 수단 (43) 은, 차원마다, 영역 특징량 산출 수단 (3) 으로부터 공급되는 제1의 영역 특징량과 제2의 영역 특징량 사이의 차분치를 산출해, 양자화 경계 결정 수단 (45) 과 양자화 수단 (44) 에 공급한다.
[0086] 차분치는, 영역 특징량이 스칼라량의 경우 (예를 들어 휘도치의 평균치) 는, 예를 들어, 제1의 영역 특징량으로부터 제2의 영역 특징량을 (혹은 그 역을) 감산해 획득된 스칼라량이다. 또, 영역 특징량이 벡터량인 경우에는, 예를 들어, 각각의 벡터를 임의의 방법에 의해 스칼라량으로 변환하고 나서, 스칼라량의 차분치를 획득해도 된다. 또, 영역 특징량이 벡터량인 경우에는, 제1의 영역 특징량과 제2의 영역 특징량 사이의 차 벡터를, 차분치 (벡터량) 라고 해도 된다.
[0087] 차분치 산출 수단 (43) 으로부터 공급된 특징 벡터의 모든 차원에 대한 차분치가 양자화 경계 결정 수단 (45) 에 공급되면, 양자화 경계 결정 수단 (45) 은 모든 차원의 차분치의 분포에 기초하여, 양자화의 경계를 결정해, 결정된 양자화 경계 관련 정보를 양자화 수단 (44) 에 공급한다. 여기서 모든 차원의 차분치의 분포는, 차분치 (혹은 차 벡터) 에 대한 발생의 빈도 (확률) 을 의미한다.
[0088] 또 양자화의 경계를 결정한다는 것은, 차분치를 양자화할 때에, 빠짐없이, 또한 배타적으로 양자화 인덱스에 할당하기 위한 파라미터를 결정하는 것을 의미한다. 차분치가 스칼라량인 경우는, 예를 들어, 각 양자화 인덱스 (양자화 레벨) 에 대한 치역 (즉 임계값) 을 결정해, 그 치역 (임계값) 을 양자화 경계의 정보로서 양자화 수단 (43) 에 공급한다. 또 차분치가 벡터량인 경우는, 예를 들어 벡터 양자화를 행하기 위한 파라미터, 즉, 예를 들어, 각 양자화 인덱스의 대표 벡터 (중심 벡터 등) 을 결정해, 그것을 양자화 경계의 정보로서 양자화 수단 (44) 에 공급한다.
[0089] 양자화 경계 결정 수단 (45) 는, 차분치가 스칼라량이고 M 값의 양자화를 실시하는 경우 (M=2, 3,…등) 에, 모든 차원의 차분치의 분포에 기초하여, 각각의 양자화 인덱스의 전차원에 대한 비율이 균등하게 되도록, 양자화의 치역 (임계값) 을 결정해도 된다.
[0090] 예를 들어, 상기 식 1의 변형으로서 상수 α 를 이용해, Vn1+α>Vn2인 경우에는 양자화 인덱스가 +1, Vn1+α≤Vn의 경우에는 양자화 인덱스가 -1인 2개 값의 양자화 (M=2) 를 수행하는 경우에, 양자화 인덱스 +1과 양자화 인덱스 -1의 비율이 균등하게 되도록, 차분치의 분포의 중앙의 점 (좌우의 분포의 적분치가 동일해지는 점) 을 양자화의 임계값 α로 결정해도 된다. 또 차분치가 벡터량인 경우도 동일하게, M 값의 양자화를 실시하는 경우에, 모든 차원의 차 벡터의 분포에 기초하여, 각각의 양자화 인덱스의 전차원에 대한 비율이 균등하게 되도록, 각 양자화 인덱스에 할당되는 벡터 공간의 영역을 결정하거나 벡터 양자화를 실시할 때의 각 양자화 인덱스의 대표 벡터 (중심 벡터 등) 를 결정해도 된다. 이와 같이, 전차원에 대한 양자화 인덱스의 비율을 균등하게 하는 것에 의해 (즉, 양자화 인덱스의 편향을 제거하는 것에 의해), 엔트로피가 증가될 수 있어, 식별 능력이 향상될 수 있다.
[0091] 또한, 양자화 경계 결정 수단 (45) 이, 양자화 인덱스의 전차원에 대한 비율이 균등하게 되도록 양자화의 경계를 결정하고, 결정된 경계에 기초하여 양자화 수단 (44) 이 양자화를 실시하는 비교 및 양자화 방법을, 비교 및 양자화 방법 F라고 부르기로 한다.
[0092] 또 예를 들어, 양자화 경계 결정 수단 (45) 은, 차분치가 스칼라량이고 식 2에 의한 3개 값의 양자화를 실시하는 경우에 (양자화 인덱스가 +1, 0,-1 이다), 차가 없는 것을 나타내는 양자화 인덱스 0 으로 양자화하는데 사용된 임계값 th (이 임계값 이하인 경우에 양자화 인덱스를 0으로 설정한다) 를, 모든 차원의 차분치의 분포에 기초하여 결정하고, 결정된 임계값 th를 양자화 수단 (44) 에 공급해도 된다 (제1의 실시형태의 도 4에 도시된 비교 수단 (4) 에서, 이 임계값 th는 미리 설정된다). 예를 들어, 모든 차원의 차분치의 절대치를 산출하고, 산출한 차분치의 절대치를 소트하고, 상위 또는 하위로부터, 미리 결정된 비율 (이 미리 결정된 비율은, 예를 들어, 입력으로서 공급된다) 의 점을 임계값 th로 설정해도 된다 (이 비교 및 양자화 방법을 비교 및 양자화 방법 G라고 부르기로 한다). 또, 미리 결정된 비율에 의해서가 아니라, +1, 0,-1의 양자화 인덱스의 비율이 균등하게 가까워지는 방식에 의해서, 임계값 th를 결정해도 된다 (이 비교 및 양자화 방법을 비교 및 양자화 방법 H라고 부르기로 한다). 비교 및 양자화 방법 H는, 식 2에 따라 수행된 비교 및 양자화 방법 F의 구체예에 상당한다.
[0093] 비교 및 양자화 방법 G의 보다 구체적인 방법을, 미리 결정된 백분율이 P% (예를 들어 P=25%) 인 예를 들어 설명한다. 모든 차원 (차원수=N) 의 차분치의 절대치를, 오름 순으로 소트하고, 오름 순으로 소트된 차분치의 절대치의 집합을 D(i) ={D(0), D(1), D(2),…, D(N-1) } 로서 나타낸다. 여기서, 오름 순으로 소트된 순열의 하위로부터 P%의 위치에 있는 값은, 예를 들어, D(floor(N×P/100)) 가 되어, 임계값 th=D(floor(N×P/100)) 가 된다. 또한, floor() 는, 소수점 이하의 잘라버림을 실시하는 함수임에 유의한다.
[0094] 본 실시 형태에 있어서의 방법은, 제1의 실시형태에서처럼, 비교 수단 (4) 가 도 4에 도시된 구성을 취하는 경우와 대비될 수 있다. 제1의 실시형태의 도 4에 도시된 구성에서는, 미리 결정된 임계값 th가 입력으로서 공급되는데 대해, 제2의 실시형태의 위에서 설명한 방법에서, 양자화 경계 결정 수단 (45) 이, 모든 차원의 차분치의 분포에 기초하여, 화상에 대해 적응적으로 임계값 th를 산출한다. 이와 같이, 제1의 실시형태에서는 임계값 th가 고정화 되어 있는 반면, 제2의 실시형태에서는 임계값 th가 화상에 대해 적응적으로 산출된다. 화상에 대해 적응적으로 임계값 th가 산출되므로, 임계값 th가 고정화되어 있는 경우와 비교해, 특징 벡터의 차원의 값이, 특정의 양자화 인덱스에 치우치는 (특정의 양자화 인덱스의 출현 확률이 높은) 것을 억제할 수가 있기 때문에 (특히 기복이 적은 화상에 대해), 식별 능력을 높게 할 수 있다. 예를 들어, 제1의 실시형태에서처럼 고정화된 임계값 th를 사용한 경우, 기복이 적은 화상은, 특징 벡터의 대다수의 차원 (또는 모든 차원) 에서 양자화 인덱스가 0이 되어 버린다. 하지만, 제2의 실시형태의 적응적인 임계값 th를 사용하면, 기복이 적은 화상에 대해는 임계값 th가 작은 값으로 자동적으로 조정되기 때문에, 특징 벡터의 대다수의 차원에서 양자화 인덱스가 0이 되는 사태가 발생하지 않는다.
[0095] 양자화 수단 (44) 은, 차분치 산출 수단 (43) 으로부터 공급되는 각각의 차원의 차분치와 양자화 경계 결정 수단 (45) 으로부터 공급되는 양자화 경계의 정보에 기초하여, 양자화를 실시하고, 양자화 인덱스를 출력한다.
[0096] 또한, 양자화 수단 (44) 은, 양자화 경계 결정 수단 (45) 으로부터 출력된 양자화 경계 정보를 무시한 양자화를 실시하는 경우 의미가 없어지기 때문에, 양자화 경계 결정 수단 (45) 이 양자화 경계를 결정했을 때 상정하고 있던 양자화 방법을 따를 필요가 있음에 유의한다.
[0097] [제2의 실시형태의 동작]
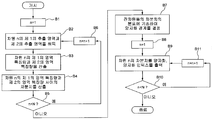
다음으로, 도 7의 플로우차트를 참조해, 제2의 실시형태에 있어서의 화상 식별자 추출 장치의 동작을 설명한다. 도 7의 플로우차트에서는, 특징 벡터의 차원 (의 번호) 은 「n」으로 나타내어지고, 1으로부터 N까지의 합계 N 차원이 존재한다.
[0098] 먼저, 차원 결정 수단 (1) 은, 특징 벡터를 추출하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 추출 영역 취득 수단 (2) 에 공급한다 (단계 B1).
[0099] 다음으로, 추출 영역 취득 수단 (2) 는, 입력으로서 공급되는 차원별 추출 영역 정보로부터, 차원 n의 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보를 취득해, 영역 특징량 대표치 산출 수단 (3) 에 공급한다 (단계 B2).
[0100] 다음으로, 영역 특징량 대표치 산출 수단 (3) 은, 입력으로서 공급되는 화상으로부터, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 산출해, 차분치 산출 수단 (43) 에 공급한다 (단계 B3).
[0101] 다음으로, 차분치 산출 수단 (43) 은, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량 사이의 차분치를 산출해, 양자화 경계 결정 수단 (45) 과 양자화 수단 (44) 에 공급한다 (단계 B4).
[0102] 다음으로, 모든 차원에 대한 차분치의 산출까지의 처리가 종료했는지의 여부를 판정 (즉 n<N 이 참인지 거짓인지를 판정) 한다 (단계 B5). 모든 차원에 대한 차분치 산출까지의 처리를 종료했을 경우 (즉 n<N가 거짓인 경우) 는 단계 B7로 이행한다. 모든 차원에 대한 차분치 산출까지의 처리가 종료되지 않은 경우 (즉 n<N가 참인 경우) 에는, 단계 B6로 이행한다. 단계 B6에서는, 차원 결정 수단 (1) 이, 특징 벡터를 추출하기 위한 다음의 차원을 결정해 (n=n+1), 추출 영역 취득 수단 (2) 에 공급한다. 그리고, 재차 단계 B2로 이행한다.
[0103] 또한, 여기서는, 차원 1으로부터 차원 N까지 차례로 추출 처리를 실시하고 있지만, 차례는 이것에 한정되지 않고 임의로 취해질 수도 있음에 유의한다.
[0104] 다음으로, 양자화 경계 결정 수단 (45) 은, 차분치 산출 수단 (43) 으로부터 공급되는 특징 벡터의 모든 차원의 차분치가 공급되면, 모든 차원의 차분치의 분포에 기초하여, 양자화의 경계를 결정해, 결정한 양자화 경계의 정보를 양자화 수단 (44) 에 공급한다 (단계 B7).
[0105] 다음으로, 단계 B8에서는, 양자화를 실시하는 (양자화 인덱스를 산출하는) 최초의 차원으로서 차원 1을 설정 (n=1) 한다.
[0106] 다음으로, 양자화 수단 (44) 은, 차원 n의 차분치와 양자화 경계 결정 수단 (45) 으로부터 공급된 양자화 경계에 기초하여, 양자화를 실시해, 양자화 인덱스를 출력한다 (단계 B9).
[0107] 다음으로, 모든 차원에 대한 양자화 인덱스의 출력이 종료되었는지의 여부를 판정 (즉 n<N가 참인지 거짓인지를 판정) 한다 (단계 B10). 모든 차원에 대한 양자화 인덱스의 출력을 종료했을 경우 (즉 n<N가 거짓인 경우) 에는, 처리를 종료한다. 모든 차원에 대한 양자화 인덱스의 출력이 종료되지 않은 경우 (즉 n<N가 참인 경우) 에는, 단계 B11 로 이행한다. 단계 B11에서는, 양자화를 실시하는 특징 벡터의 차원으로서 다음의 차원을 설정한다 (n=n+1). 그리고, 재차 단계 B9 로 이행한다.
[0108] 또한, 여기서는, 차원 1으로부터 차원 N까지 차례로 양자화 처리를 실시하고 있지만, 차례는 이것에 한정되지 않고 임의로 취해질 수도 있음에 유의한다.
[0109] [제2의 실시형태의 효과]
제2의 실시형태에서는, 양자화의 경계가 고정되어 있는 제1의 실시형태와 비교해, 양자화의 경계가 화상에 대해 적응적으로 (동적으로) 산출되는 점이 상이하다. 제1의 실시형태와 같이, 양자화의 경계가 고정화되면, 특정의 화상 (예를 들어 기복이 적은 평탄한 화상 등) 에 대해, 특징 벡터의 차원의 값이, 특정의 양자화 인덱스에 치우치는 (특정의 양자화 인덱스의 출현 확률이 높은) 사태가 발생해 (엔트로피가 낮아져), 이들의 화상에 대해 식별 능력이 저하되는 문제가 발생한다. 한편, 제2의 실시형태와 같이, 양자화의 경계가 화상에 대해 적응적으로 (동적으로) 산출됨으로써, 어느 화상에 대해서도, 특징 벡터의 차원의 값이, 특정의 양자화 인덱스에 치우치는 (특정의 양자화 인덱스의 출현 확률이 높은) 일을 억제할 수가 있기 때문에, 식별 능력을 높일 수 있다.
[0110] [제3의 실시형태]
[제3의 실시형태의 구성]
다음으로, 본 발명의 제3의 실시형태에 대해 도면을 참조해 상세하게 설명한다.
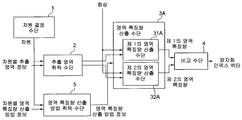
[0111] 도 8을 참조하면, 본 발명의 제3의 실시형태는, 도 1에 나타낸 제1의 실시형태의 구성에, 영역 특징량 산출 방법 취득 수단 (5) 이 추가되어 영역 특징량 산출 수단 (3) 이, 제 1및 제2의 영역 특징량 산출 수단 (31A 및 32 A) 를 갖는 영역 특징량 산출 수단 (3A) 으로 교체되는 점에서 상이하다. 또한, 그 이외의 구성에 관해서는, 제1의 실시형태의 구성과 같기 때문에, 여기서는 설명을 생략한다. 또한, 여기서는, 제1의 실시형태와의 편성으로서 설명하고 있지만, 제2의 실시형태와의 편성도 허용될 수 있다.
[0112] 영역 특징량 산출 방법 취득 수단 (5) 에는, 차원 결정 수단 (1) 으로부터의 차원과 차원별 영역 특징량 산출 방법 정보가 공급된다.
[0113] 차원별 영역 특징량 산출 방법 정보는, 특징 벡터의 차원마다 결부된, 차원에서의 영역 특징량의 산출 방법을 나타내는 정보이며, 차원간에서 영역 특징량 산출 방법이 상이해야 하는 것이 필수 조건이다. 또한 여기서, 영역 특징량 산출 방법이 상이함은, 동일한 순서에 대해 상이한 파라미터 (임계값 등) 를 적용하는 경우도 포함한다는 것에 유의한다.
[0114] 여기서 영역 특징량 산출 방법이란, 예를 들어, 제1의 실시형태의 영역 특징량 산출 수단 (3) 의 설명으로 기술한 각종 방법, 또 거기에 따르는 파라미터를 포함한다.
[0115] 또한 차원별 영역 특징량 산출 방법 정보가 나타내는 차원마다의 영역 특징량 산출 방법은, 특징 벡터의 전차원안에, 영역 특징량 산출 방법이 상이한 차원의 적어도 한 쌍이 포함되야 하는 최저 조건을 가짐에 유의한다. 영역 특징량 산출 방법이 서로 상이한 차원이 많을수록, 바람직한데, 이것은, 영역 특징량 산출 방법이 서로 상이한 차원이 많을수록, 특징 벡터에서 많은 차원간에서 상관이 작아져, 식별 능력이 높아지기 때문이다. 예를 들어, 특징 벡터의 모든 차원간에서, 영역 특징량 산출 방법이 서로 상이해도 된다.
[0116] 또한, 차원마다의 영역 특징량 산출 방법을 나타내는 정보는, 영역 특징량을 산출할 방법이 유일하게 특정되는 한은, 임의의 형식을 취할 수도 있다.
[0117] 도 9는, 차원마다의 영역 특징량 산출 방법의 예를 나타낸다. 도 9에 나타낸 바와 같이, 차원간에서 영역 특징량 산출 방법이 상이하다. 또 도 9에 나타낸 예와 같이, 스칼라량과 벡터량의 특징량이 혼재할 수도 있다 (제1, 3, 5, 6, 8, 9, 10, 12 차원은 스칼라량, 제2, 4, 7, 11 차원은 벡터량이다).
[0118] 영역 특징량 산출 방법 취득 수단 (5) 은, 입력으로서 공급되는 차원별 영역 특징량 산출 방법 정보로부터, 차원 결정 수단 (1) 으로부터 공급되는 차원과 결부된 영역 특징량 산출 방법을 나타내는 정보를 취득해, 영역 특징량 산출 수단 (3A) 에 공급한다.
[0119] 영역 특징량 산출 수단 (3A) 은, 입력으로서 공급되는 화상으로부터, 차원마다, 추출 영역 취득 수단으로부터 공급된 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보에 근거해, 영역 특징량 산출 방법 취득 수단 (5) 로부터 공급되는 영역 특징량 산출 방법을 나타내는 정보에 따라, 제1의 추출 영역의 특징량과 제2의 추출 영역의 특징량을, 각각 제1의 영역 특징량과 제2의 영역 특징량으로서 산출해, 비교 수단 (4)에 공급한다.
[0120] 영역 특징량 산출 수단 (3A) 에서는, 공급되는 추출 영역을 나타내는 정보의 차원과 영역 특징량 산출 방법을 나타내는 정보의 차원이 동기화될 필요가 있다.
[0121] [제3의 실시형태의 동작]
다음으로, 도 10의 플로우차트를 참조해, 제3의 실시형태에 있어서의 화상 식별자 추출 장치의 동작을 설명한다. 도 10의 플로우차트에서는, 특징 벡터의 차원 (의 번호) 을 「n」 로 나타내고, 1로부터 N까지의 합계 N차원이 존재한다.
[0122] 먼저, 차원 결정 수단 (1) 은, 특징 벡터를 추출하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 추출 영역 취득 수단 (2) 및 영역 특징량 산출 방법 취득 수단 (5) 에 공급한다 (단계 C1). 다음으로, 추출 영역 취득 수단 (2) 은, 입력으로서 공급된 차원별 추출 영역 정보로부터, 차원 n의 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보를 취득해, 영역 특징량 산출 수단 (3A) 에 공급한다 (단계 C2).
[0123] 다음으로, 영역 특징량 산출 방법 취득 수단 (5) 은, 입력으로서 공급된 차원별 영역 특징량 산출 방법 정보로부터, 차원 n에 대응하는 영역 특징량 산출 방법을 나타내는 정보를 취득해, 영역 특징량 산출 수단 (3A) 에 공급한다 (단계 C3).
[0124] 다음으로, 영역 특징량 산출 수단 (3A) 은, 입력으로서 공급된 화상으로부터, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 산출해, 비교 수단 (4)에 공급한다 (단계 C4). 다음으로, 비교 수단 (4) 은, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 비교하고, 비교한 결과를 양자화하고, 양자화 인덱스를 출력한다 (단계 C5). 다음으로, 모든 차원에 대해 양자화 인덱스의 출력이 종료되었는지의 여부를 판정한다 (단계 C6). 모든 차원에 대해 양자화 인덱스의 출력이 종료된 경우에는 처리를 종료한다. 모든 차원에 대해 양자화 인덱스의 출력이 종료되지 않은 경우에는, 단계 C7로 이행한다. 단계 C7에서는, 차원 결정 수단 (1) 이, 특징 벡터를 추출하기 위한 다음의 차원을 결정해 (n=n+1), 추출 영역 취득 수단 (2) 및 영역 특징량 산출 방법 취득 수단 (5) 에 공급한다. 그리고, 처리는 재차 단계 C2로 이행한다.
[0125] 또한, 여기서는, 차원 1으로부터 차원 N까지 차례로 추출 처리를 실시하고 있지만, 이것에 한정되지 않고 임의의 차례가 취해질 수도 있다. 또 이 처리 순서에 한정하지 않고, 복수의 차원에 대한 추출 처리를 병렬로 실시하는 것도 가능하다. 게다가 단계 C2와 단계 C3의 순서를 반대로 해도 된다.
[0126] [제3의 실시형태의 효과]
제1의 실시형태의 효과에 더하여, 제3의 실시형태는 상이한 화상을 식별할 수 있는 정도인 식별 능력을 더욱 높게 할 수 있는 효과를 갖는다.
[0127] 그 이유는, 차원간에서 영역 특징량 산출 방법이 상이함 (다양한 영역 특징량 산출 방법이 사용됨) 에 따라, 차원간의 상관을 보다 작게 할 수 있기 때문이다.
[0128] [제4의 실시형태]
[제4의 실시형태의 구성]
다음으로, 본 발명의 제4의 실시형태에 대해 도면을 참조해 상세하게 설명한다.
[0129] 도 11을 참조하면, 본 발명의 제4의 실시형태의 구성은, 도 1에 나타낸 제1의 실시형태의 구성과는, 비교 방법 취득 수단 (6) 이 추가되어 비교 수단 (4) 이 비교 수단 (4B) 으로 교체되는 점에서 상이하다. 또한, 그 이외의 구성에 관해서는, 제1의 실시형태의 구성과 같기 때문에, 여기서는 설명을 생략한다. 또한, 여기서는, 제1의 실시형태와의 편성이 설명되어 있지만, 제2의 실시형태 및 제3의 실시형태와의 편성도 허용될 수 있다.
[0130] 비교 방법 취득 수단 (6) 에는, 차원 결정 수단 (1) 으로부터의 차원과 차원별 비교 방법 정보가 공급된다.
[0131] 차원별 비교 및 양자화 방법 정보는, 특징 벡터의 차원마다 결부된, 차원에서 영역 특징량을 비교해 양자화를 실시하는 방법을 나타내는 정보이며, 차원간에서 비교 및 양자화 방법이 상이해야 하는 것이 필수 조건이다. 또한 여기서, 비교 및 양자화 방법이 상이함은, 동일한 순서에 대해 상이한 파라미터 (임계값, 양자화 인덱스 수 등) 를 적용하는 것도 포함한다는 것에 유의한다.
[0132] 여기서 비교 및 양자화 방법은 제1의 실시형태의 비교 수단 (4) 의 설명에서 기술한 각종 비교 및 양자화의 방법, 또 거기에 따르는 파라미터 (임계값, 양자화 인덱스 수 등) 및, 제2의 실시형태의 비교 수단 (4A) 의 설명에서 기술한 각종 비교 및 양자화의 방법, 또 거기에 따르는 파라미터 (임계값, 양자화 인덱스 수 등) 를 포함한다.
[0133] 또한 차원별 비교 및 양자화 방법 정보가 나타내는 차원마다의 비교 및 양자화 방법은, 특징 벡터의 전차원안에, 비교 및 양자화 방법이 상이한 차원의 적어도 하나의 쌍이 포함되어야 하는 최저 조건을 갖는다. 비교 및 양자화 방법이 서로 상이한 차원이 많을수록, 바람직한데, 이것은, 비교 및 양자화 방법이 서로 상이한 차원이 많을수록, 특징 벡터에서 많은 차원간에서 상관이 작아져, 식별 능력이 높아지기 때문이다. 예를 들어, 특징 벡터의 모든 차원간에서, 비교 및 양자화 방법이 서로 상이해도 된다는 것에 유의한다.
[0134] 또한, 차원마다의 비교 및 양자화 방법을 나타내는 정보는, 영역 특징량을 비교해 양자화하는 방법이 유일하게 특정되는 한은, 임의의 형식을 취할 수도 있다.
[0135] 도 12에, 차원마다의 비교 및 양자화 방법의 예를 나타낸다. 도 12에 나타내는 바와 같이, 차원간에서 비교 및 양자화 방법이 상이하다. 또, 제3, 5, 12 차원과 같이, 같은 비교 및 양자화 방법에서, 상이한 파라미터 (임계값 th) 를 설정 해도 된다. 또한, 도 12에 나타낸, 차원마다의 비교 및 양자화 방법의 예는, 도 9에 나타낸, 차원마다의 영역 특징량 산출 방법의 예와 결부된다. 그래서, 스칼라량의 영역 특징량에 대해는 스칼라량의 비교 및 양자화 방법을 예로서 나타내고, 벡터량의 영역 특징량에 대해는 벡터량의 비교 및 양자화 방법을 예로서 나타낸다.
[0136] 비교 방법 취득 수단 (6) 은, 입력으로서 공급되는 차원별 비교 및 양자화 방법 정보로부터, 차원 결정 수단 (1) 으로부터 공급된 차원에 대응하는 비교 및 양자화 방법을 나타내는 정보를 취득해, 비교 수단 (4B) 에 공급한다.
[0137] 비교 수단 (4B) 는, 차원마다, 영역 특징량 산출 수단 (3) 으로부터 공급되는 제1의 영역 특징량과 제2의 영역 특징량을, 비교 방법 취득 수단 (6) 으로부터 공급되는 비교 및 양자화 방법을 나타내는 정보에 따라, 비교 및 양자화해, 양자화 인덱스를 출력한다. 비교 수단 (4B) 는, 비교 및 양자화 방법에 의해, 필요에 따라, 제1의 실시형태의 비교 수단 (4) 와 제2의 실시형태의 비교 수단 (4B) 의 양방을 내포하는 구성을 가질 수도 있다.
[0138] 비교 수단 (4B) 에서는, 공급되는 영역 특징량의 차원과 비교 및 양자화 방법을 나타내는 정보의 차원이 동기화될 필요가 있다.
[0139] [제4의 실시형태의 동작]
다음으로, 도 13의 플로우차트를 참조해, 제4의 실시형태에 있어서의 화상 식별자 추출 장치의 동작을 설명한다. 도 13의 플로우차트에서는, 특징 벡터의 차원 (의 번호) 을 「n」로 나타내고, 1으로부터 N까지의 합계 N차원이 존재한다.
[0140] 먼저, 차원 결정 수단 (1) 은, 특징 벡터를 추출하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 추출 영역 취득 수단 (2) 및 비교 방법 취득 수단 (6) 에 공급한다 (단계 D1). 다음으로, 추출 영역 취득 수단 (2) 는, 입력으로서 공급된 차원별 추출 영역 정보로부터, 차원 n의 제1의 추출 영역과 제2의 추출 영역을 나타내는 정보를 취득해, 영역 특징량 산출 수단 (3) 에 공급한다 (단계 D2).
[0141] 다음으로, 비교 방법 취득 수단 (6) 은, 입력으로서 공급되는 차원별 비교 및 양자화 방법 정보로부터, 차원 n에 대응하는 비교 및 양자화 방법을 나타내는 정보를 취득해, 비교 수단 (4B) 에 공급한다 (단계 D3).
[0142] 다음으로, 영역 특징량 산출 수단 (3) 은, 입력으로서 공급되는 화상으로부터, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 산출해, 비교 수단 (4B) 에 공급한다 (단계 D4). 다음으로, 비교 수단 (4B) 는, 차원 n의 제1의 영역 특징량과 제2의 영역 특징량을 비교하고, 비교한 결과를 양자화하고, 양자화 인덱스를 출력한다 (단계 D5). 다음으로, 모든 차원에 대해 양자화 인덱스의 출력이 종료되었는지의 여부를 판정한다 (단계 D6). 모든 차원에 대해 양자화 인덱스의 출력이 종료된 경우에는 처리를 종료한다. 모든 차원에 대해 양자화 인덱스의 출력이 종료되지 않은 경우에는, 처리는 단계 D7로 이행한다. 단계 D7에서는, 차원 결정 수단 (1) 이, 특징 벡터를 추출하기 위한 다음의 차원을 결정해 (n=n+1), 추출 영역 취득 수단 (2) 및 비교 방법 취득 수단 (6) 에 공급한다. 그리고, 처리는 재차 단계 D2로 이행한다.
[0143] 또한, 여기서는, 차원 1으로부터 차원 N까지 차례로 추출 처리를 실시하고 있지만, 이 차례에 한정되지 않고 임의의 차례가 취해질 수도 있다. 또 이 처리 순서에 한정하지 않고, 복수의 차원에 대한 추출 처리를 병렬로 실시해도 된다. 게다가 단계 D2와 단계 D3의 순서를 반대로 해도 되고, 단계 D3를 단계 D5의 직전에 실행해도 된다.
[0144] [제4의 실시형태의 효과]
제1의 실시형태의 효과에 더하여, 제4의 실시형태는 상이한 화상을 식별할 수 있는 정도인 식별 능력을 더욱 높게 할 수 있다.
[0145] 그 이유는, 차원간에서 비교 및 양자화 방법이 상이함 (다양한 비교 및 양자화 방법이 사용됨) 에 따라, 차원간의 상관을 보다 작게 할 수 있기 때문이다.
[0146] [그 밖의 실시형태]
이상 본 발명의 실시형태에 대해 설명했지만, 본 발명은 이상의 실시형태에게만 한정되지 않고, 그 외 각종의 부가 및 변경이 가능하다. 또, 본 발명의 화상 식별자 추출 장치는, 그의 기능을 하드웨어적으로 실현되는 것은 물론, 컴퓨터와 프로그램으로 실현되도록 맞추어진다. 그러한 프로그램은, 자기 디스크, 반도체 메모리 등과 같은 컴퓨터 판독가능 기록 매체에 기록된 형태로 제공되어 예를 들면 컴퓨터의 시작시 컴퓨터에 의해 판독되어 그 컴퓨터의 동작을 제어함으로써, 그 컴퓨터를 전술한 각 실시형태에 있어서의 차원 결정 수단, 추출 영역 취득 수단, 영역 특징량 산출 수단, 비교 수단, 영역 특징량 산출 방법 취득 수단, 비교 방법 취득 수단으로서 기능시킨다.
[0147] 다음으로, 본 발명에 있어서의 다른 실시형태를 나타낸다.
[0148] [제5의 실시형태]
제5의 실시형태에서는, 추출하는 특징 벡터의 차원수는 300 차원 (제1 차원으로부터 제300 차원) 이다.
[0149] 제5의 실시형태에서는, 차원마다의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 은, 여러가지 형상의 사각형으로 구성된다. 제5의 실시형태에 있어서, 추출 영역 취득 수단 (2) 에 입력으로서 공급되는 차원별 추출 영역 정보를 도 14에 나타낸다. 도 14는, 미리 결정된 화상 사이즈인, 가로폭 320화소×세로폭 240화소의 화상 사이즈에 대한, 차원마다의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 의 사각형의 네 귀퉁이의 XY좌표치를 나타낸다. 예를 들어, 제1 차원의 추출 영역은, 좌표치 (262.000, 163.000), 좌표치 (178.068, 230.967), 좌표치 (184.594, 67.411), 좌표치 (100.662, 135.378) 를 네 귀퉁이로 하는 사각형으로 구성되는 제1의 추출 영역과 좌표치 (161.000, 133.000), 좌표치 (156.027, 132.477), 좌표치 (164.240, 102.170), 좌표치 (159.268, 101.647) 를 네 귀퉁이로 하는 사각형으로 구성되는 제1의 추출 영역으로 구성된다.
[0150] 차원마다의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 은, 가로폭 320화소×세로폭 240화소의 화상 사이즈에 정규화된 화상 에 대해, 이 네 귀퉁이의 좌표치로 둘러싸이는 영역안에 포함되는 정수치의 좌표치의 화소의 집합이 된다. 단, 네 귀퉁이의 좌표치로 둘러싸이는 영역안에 포함되는 부의 좌표치는, 추출 영역에 포함하지 않는다.
[0151] 제5의 실시형태에 있어서, 영역 특징량 산출 방법 취득 수단 (5) 에 입력으로서 공급된 차원별 영역 특징량 산출 방법 정보를 도 15에 나타낸다. 제5의 실시형태에서는, 모든 차원에 대해, 각각의 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 에 포함되는 화소 군의 휘도치의 평균치가, 각각의 추출 영역의 영역 특징량이 된다.
[0152] 제5의 실시형태에 있어서, 비교 방법 취득 수단 (6) 에 입력으로서 공급된 차원별 비교 및 양자화 방법 정보를 도 17에 나타낸다. 제5의 실시형태에서는, 차원마다, 비교 및 양자화 방법 B 또는 비교 및 양자화 방법 G가 이용되고, 차원마다 그 파라미터의 값도 상이하다. 예를 들어, 제1 차원에서, 비교 및 양자화 방법 G가 사용되고, 임계값 th=D(floor(300×5.0/100)) 이다. 또, 예를 들어 제2 차원에서, 비교 및 양자화 방법 G가 사용되고, 임계값 th=D(floor(300×10.0/100)) 이다. 또, 예를 들어 제9 차원에서, 비교 및 양자화 방법 B가 사용되고, 임계값 th=3.0이다.
[0153] [제6의 실시형태]
제6의 실시형태는, 제5의 실시형태와 같이, 추출하는 특징 벡터의 차원수는 300 차원 (제1 차원으로부터 제300 차원) 이다. 또 제6의 실시형태에서는, 추출 영역 취득 수단 (2) 에 입력으로서 공급되는 차원별 추출 영역 정보로서 제5의 실시형태와 같이 도 14에 나타내는 정보를 사용한다. 또, 더 제6의 실시형태에서는, 비교 방법 취득 수단 (6) 에 입력으로서 공급되는 차원별 비교 및 양자화 방법 정보로서 제5의 실시형태와 같이 도 17에 나타내는 정보를 사용한다.
[0154] 제6의 실시형태에 있어서, 영역 특징량 산출 방법 취득 수단 (5) 에 입력으로서 공급되는 차원별 영역 특징량 산출 방법 정보를 도 16에 나타낸다. 제6의 실시형태에서는, 차원마다, 추출 영역 (제1의 추출 영역과 제2의 추출 영역) 에 포함되는 화소 군의 휘도치의 평균치, 또는, 퍼센타일 휘도치 특징량이 이용되어 같은 퍼센타일 휘도치 특징량을 사용하는 경우에서도, 차원마다 그 특징량은 상이하다. 예를 들어, 제1 차원은, 추출 영역에 포함되는 화소의 휘도치의 평균치이다. 또, 예를 들어 제4 차원에서, 퍼센타일 휘도치 특징량이 사용되고, 그 값은 Y(floor(N×20.0/100) 이다. 또, 제8 차원에서, 퍼센타일 휘도치 특징량이 사용되고, 그 값은 Y(floor(N×80.0/100) 이다.
[0155] [제7의 실시형태]
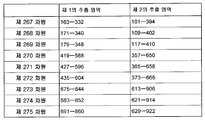
제7의 실시형태는, 추출하는 특징 벡터의 차원수는 325 차원 (제1 차원으로부터 제325 차원) 이다. 제7의 실시형태의 경우에는, 각 영역은, 화상을 세로 방향 32개, 가로방향 32개로 분할하여 형성된 1024개의 블록중에서 블록의 편성으로 구성된다. 여기서, 각 블록에 대해, 도 27에 나타내는 바와 같이, 좌상으로부터, 0으로부터 시작되는 인덱스를 부여해, 이 인덱스를 이용해 영역을 기술한다. 구체적으로는, 직사각형 영역을, 그 좌상의 블록의 인덱스 「a」 와 우하의 블록의 인덱스 「b」를 이용해 「a-b」 와 같이 표현한다. 예를 들어, 인덱스 0, 1, 32, 33의 4개의 블록으로 이루어지는 직사각형은, 0-33과 같이 기술한다. 또, 이런 방식으로 형성된 직사각형을 기호 「|」 를 이용해 연결한 경우에는, 그 기호의 전후의 직사각형을 연결해 형성된 영역을 표현한다. 예를 들어, 0-33|2-67는, 0-33에 의해 정의되는 직사각형과 2-67에 의해 정의되는 직사각형을 연결하여 형성된 영역, 즉, 블록 번호 0, 1, 2, 3, 32, 33, 34, 35, 66 및 67에 의해 형성되는 영역을 나타낸다.
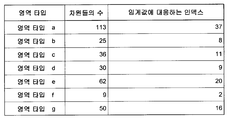
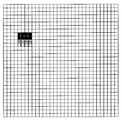
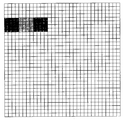
[0156] 이런 방식으로 기재된, 제7의 실시형태의 각 차원에 대응하는 영역을 나타낸 것이 도 28이다. 도 28에서, 영역의 타입별로 도 28a, 도 28b, 도 28c, 도 28d, 도 28e, 도 28f, 도 28g로 나누어 그 325 차원을 기술하고 있다. 여기서, 영역의 타입이란, 제1, 제2의 추출 영역간의 상대 위치나 형상의 편성에 의해 정해지는 유사한 영역 패턴을 갖는 차원들로 이루어지는 그룹을 의미한다.
[0157] 구체적으로는, 도 28a의 경우에는, 도 30a에 일례를 나타내는 바와 같이, 종횡 4 블록으로 이루어지는 정방형을 세로 방향이나 가로방향으로 2 등분 해 형성되는 2개의 영역이 제1, 제2의 추출 영역으로서 이용된 경우에 상당한다. 이 때문에, 제1, 제2의 추출 영역 양쪽 모두의 형상은, 세로 4 블록, 가로 2 블록으로 이루어지는 직사각형, 혹은 세로 2 블록, 가로 4 블록으로 이루어지는 직사각형이다. 또, 제1, 제2의 추출 영역 사이의 상대적인 위치 관계를 보면, 직사각형의 세로 변이 서로 겹치도록 서로 인접하는 위치에 존재한다.
[0158] 도 28b의 경우에는, 도 30b에 일례를 나타내는 바와 같이, 종횡 8 블록으로 이루어지는 정방형을 종횡 2 등분 해 형성된 4개의 정방형 중에서, 좌상과 우하, 우상과 좌하를 각각 조합하여 형성된 2개의 영역을 각각 제1, 제2의 추출 영역으로서 이용된 경우에 상당한다. 이 때문에, 제1, 제2의 추출 영역의 양쪽 모두의 형상은, 종횡 2 블록으로 이루어지는 2개의 정방형을 1개의 정점을 공유하도록 45도 혹은 135도의 대각 선상에 배치한 형상이 된다. 또, 영역간의 상대적인 위치 관계를 보면, 제2의 영역을 구성하는 2개의 정방형이, 제1의 영역의 좌상의 정방형의 바로 왼쪽과 아래에 인접하는 위치에 제2의 영역이 존재한다.
[0159] 도 28c의 경우에는, 도 30c에 일례를 나타낸 바와 같이, 제1, 제2의 추출 영역의 양쪽 모두의 형상은, 종횡 10 블록으로 이루어지는 정방형이다. 또, 제1, 제2의 추출 영역간의 상대적인 위치 관계를 보면, 종횡 모두 10 블록의 정수배 만큼 멀어진 위치에 존재한다.
[0160] 도 28d의 경우에는, 도 30d에 일례를 나타내는 바와 같이, 제1, 제2의 추출 영역의 양쪽 모두의 형상은, 종횡 6 블록으로 이루어지는 정방형이다. 또 제1, 제2의 추출 영역간의 상대적인 위치 관계를 보면, 종횡 모두 6 블록의 정수배 만큼 멀어진 위치에 존재한다.
[0161] 도 28e의 경우에는, 도 30e에 일례를 나타내는 바와 같이, 정방형 영역을 중심부 분의 정방형과 그 외측의 2개로 나누어 형성되는 2개의 영역을 제1, 제2의 추출 영역으로 서 이용한 경우에 상당한다. 이 때문에, 제 2 추출 영역의 형상은, 중심 부분의 정방형이고, 제1의 추출 영역의 형상은, 전체의 정방형으로부터 제2의 추출 영역을 도려낸 형상이다. 또, 영역간의 상대적인 위치 관계를 보면, 제1의 추출 영역의 중앙의 구멍의 위치에 제2의 추출 영역이 존재한다.
[0162] 도 28f의 경우에는, 도 30f에 일례를 나타내는 바와 같이, 제1의 추출 영역의 형상은 세로 6 블록, 가로 10 블록에 의해 정의된 직사각형, 제2의 추출 영역은 세로 10 블록, 가로 6 블록에 의해 정의된 직사각형이다. 또, 제1, 제2의 추출 영역간의 상대적인 위치 관계를 보면, 중심 위치가 일치하도록 배치되어 있다.
[0163] 도 28g의 경우에는, 도 30g에 일례를 나타낸 바와 같이, 세로 4 블록, 가로 12 블록으로 이루어지는 직사각형, 혹은 세로 12 블록, 가로 4 블록으로 이루어지는 직사각형을, 세로 변을 3 등분 해 형성되는 중앙의 정방형과 그 이외의 2 영역이 제1, 제2의 추출 영역으로서 이용된 경우에 상당한다. 이 때문에, 제1의 추출 영역의 형상은 종횡 4 블록으로 이루어지는 정방형을 2개, 세로나 가로에 4 블록 떨어지게 배치한 형상이고, 제2의 추출 영역의 형상은 종횡 4 블록으로 이루어지는 정방형이다. 또, 영역의 상대적인 위치 관계를 보면, 제1의 추출 영역의 사이에 제2의 추출 영역이 존재한다.
[0164] 이하에서, 도 28a, 도 28b, 도 28c, 도 28d, 도 28e, 도 28f, 도 28g의 영역 타입을, 각각 영역 타입 a, 영역 타입 b, 영역 타입 c, 영역 타입 d, 영역 타입 e, 영역 타입 f, 영역 타입 g라고 부르기로 한다.
[0165] 제7의 실시형태에서는, 도 28에서 나타낸 각 영역에 있어서의 영역 특징량으로서 휘도치의 평균을 산출하고, 각 차원의 특징량을 산출한다. 물론, 휘도치의 평균치 대신에 미디언치이나 최대치 등, 전술한 여러가지 추출 방법에 의해 추출한 값을 영역 특징량으로서 획득하는 것이 가능하다.
[0166] 각 차원의 특징량의 양자화에서는, 상기 서술한 영역의 타입별로 임계값을 정해 양자화를 실시한다. 예를 들어, 식 2에 따라 특징량을 3개의 값으로 양자화하는 경우에는, 영역의 타입별로, 0, 1,-1의 발생 비율이 균등하게 되도록 양자화의 임계값 th를 결정하고, 양자화를 실시한다. 구체적으로는, 단락 0093에서 기술한 방법을 P=33.333%이고, N이 영역 타입별의 차원 수를 나타내는, 영역 타입별로 적용하여, 임계값 th를 획득한다. 예를 들어, 영역 타입 a의 경우에는 N=113이 되기 때문에, th=D(floor(113×33.333/100)) =D(37) 에 의해 임계값을 산출한다. 여기서, D(i) (i=0, 1,…, N-1) 는, 영역 타입 a에 해당하는 제1 차원으로부터 제113 차원의 차분치의 절대치를 오름 순으로 소트한 집합임에 유의한다. 이 경우에는 임계값에 대응하는 인덱스가 37이 된다. 동일하게, 도 29에 나타낸 바처럼, 다른 영역 타입에 대해서도, 임계값에 대응하는 인덱스를 획득할 수가 있다. 이와 같이 영역 타입별로 임계값을 획득하는 것에 의해, 전체로 임계값을 결정하는 경우에 비해 각 차원에서의 0, 1,-1의 발생 확률을 균일화할 수 있게 되어, 식별 능력이 향상된다. 물론, 전술한 다른 여러가지 양자화 방법에 의해 양자화를 수행하는 것이 가능하다.
[0167] 또한, 제7의 실시형태의 경우에는, 도 27에 나타낸 블록 마다 대표치 (예를 들어, 블록내의 화소의 휘도치의 평균치) 를 먼저 산출하고, 다음으로 영역 특징량을 추출하는 것도 가능하다. 이로써, 영역내의 전 화소로부터 직접 영역 특징량을 추출하는 경우보다 고속으로 추출할 수 있게 된다. 또, 각 영역 타입의 추출 영역은, 전체로서 대칭성을 갖는다. 이 때문에, 화상의 오른쪽과 왼쪽을 반전시키거나 상하를 반전시키는 경우에서도, 차원의 대응 관계와 부호를 적절히 변경함으로써, 좌우 또는 상하 반전한 화상으로부터 추출된 특징량으로부터 원본 화상의 특징량을 복원할 수 있다. 이 때문에, 좌우 혹은 상하를 반전시킨 화상에 대해서 조합이 수행될 수도 있다.
[0168] [조합 수단의 실시형태]
다음으로, 본 발명에서 출력된 양자화 인덱스 벡터를 조합하는 조합 수단에 대해 블록도를 이용해 설명한다.
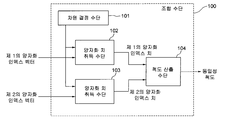
[0169] 도 21을 참조 하면, 본 발명에서 출력된 양자화 인덱스 벡터를 조합하는 조합 수단 (100) 의 블록도가 나타나 있고, 조합 수단 (100) 은 차원 결정 수단 (101), 양자화치 취득 수단 (102 및 103), 그리고 척도 산출 수단 (104) 을 포함한다.
[0170] 차원 결정 수단 (101) 은 양자화치 취득 수단 (102 및 103) 에 접속되어 결정된 차원 정보를 출력한다. 양자화치 취득 수단 (102) 는, 제1의 양자화 인덱스 벡터로부터, 차원 결정 수단 (101) 으로부터 입력되는 차원의 양자화 인덱스치를 취득해, 제1의 양자화 인덱스치로서 척도 산출 수단 (104) 에 출력한다. 양자화치 취득 수단 103은, 제2의 양자화 인덱스 벡터로부터, 차원 결정 수단 (101) 으로부터 입력되는 차원의 양자화 인덱스치를 취득해, 제2의 양자화 인덱스치로서 척도 산출 수단 (104) 에 출력한다. 척도 산출 수단 (104) 는, 양자화치 취득 수단 (102 및 103) 으로부터 각각 출력되는 제1, 제2의 양자화 인덱스치로부터 동일성을 나타내는 척도를 산출하고, 그것을 출력한다.
[0171] 다음으로, 도 21의 조합 수단 (100) 의 동작에 대해 설명한다.
[0172] 먼저, 조합 수단 (100) 에는, 제1의 화상으로부터 추출되는 양자화 인덱스 벡터인 제1의 양자화 인덱스 벡터와 제2의 화상으로부터 추출되는 양자화 인덱스 벡터인 제2의 양자화 인덱스 벡터가 입력된다. 입력된 제1, 제2의 양자화 인덱스 벡터는, 각각 양자화치 취득 수단 (102, 103) 에 입력된다.
[0173] 양자화치 취득 수단 (102 및 103) 에는, 차원 결정 수단 (101) 으로부터 출력된 차원 정보도 입력된다. 차원 결정 수단 (101) 에서는, N차원 벡터인 양자화 인덱스 벡터의 각 차원을 지정하는 정보를 순차 출력한다. 출력하는 순서는 반드시 1으로부터 N까지 1개씩 증가될 필요는 없고, 1으로부터 N까지의 차원이 과부족 없게 지정되는 순서이면, 어떠한 순서로서도 된다.
[0174] 양자화치 취득 수단 (102 및 103) 에서는, 입력된 양자화 인덱스 벡터로부터, 차원 결정 수단 (101) 으로부터 출력된 차원 정보에서 지정되는 차원의 양자화 인덱스치를 취득하고, 취득한 양자화 인덱스치를 척도 산출 수단 (104) 에 출력한다.
[0175] 척도 산출 수단 (104) 에서는, 양자화치 취득 수단 (102) 로부터 출력되는 제1의 양자화 인덱스치와 제2의 양자화 인덱스치를 비교한다. 이 비교를 각 차원에 대해 실시해, 제1, 제2의 양자화 인덱스 벡터간의 유사 척도 (혹은 거리 척도) 를 동일성 척도로서 산출한다.
[0176] 얻어진 동일성 척도는 미리 정한 임계값과 비교해, 동일성의 판정을 실시한다. 동일성 척도가 유사도를 나타내는 척도인 경우에는, 척도치가 임계값 이상의 경우에 동일로 판정한다. 한편, 동일성 척도가 거리를 나타내는 척도인 경우에는, 척도치가 임계값 이하의 경우에 동일로 판정한다.
[0177] 다음으로, 플로우차트를 이용해 도 21의 조합 수단 (100) 의 동작을 설명한다. 먼저, 동일성 척도로서 유사도 값을 사용하는 경우의 동작에 대해 설명한다.
[0178] 도 22는, 조합 수단 (100) 의 동작을 나타내는 플로우차트이다. 도 22의 플로우차트에서는, 양자화 인덱스 벡터의 차원 (의 번호) 을 「n」 으로 나타내고, 1으로부터 N까지의 합계 N차원 존재한다. 또, 유사도를 산출하는 변수를 B로 나타낸다.
[0179] 먼저, 차원 결정 수단 (101) 은, 양자화 인덱스 벡터를 조합하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 양자화치 취득 수단 (102 및 103) 에 공급함과 함께, 척도 산출 수단 (104) 에 있어서 변수 B를 0로 설정한다 (단계 S100).
[0180] 다음으로, 양자화치 취득 수단 (102 및 103) 에 있어서, 제1의 양자화 인덱스 벡터, 제2의 양자화 인덱스 벡터로부터, 차원 n의 제1의 양자화 인덱스치와 제2의 양자화 인덱스치를 취득해, 척도 산출 수단 (104) 에 공급한다 (단계 S102).
[0181] 다음으로, 척도 산출 수단 (104) 은 제1의 양자화 인덱스치와 제2의 양자화 인덱스치로부터, 각각의 양자화 인덱스에 대응하는 특징량의 사이의 유사도 ΔB를 산출한다 (단계 S104). 예를 들어, 양자화 인덱스가 일치하는 경우에는 ΔB=1으로 하고, 그 이외의 경우에는 ΔB=0으로 한다. 혹은, 양자화 인덱스로부터 양자화 전의 특징량의 대표치를 산출하고, 대표치간의 차분이 작을수록 커지는 값을 ΔB로서 사용해도 된다. 이때, 특징량의 대표치를 산출해 차분을 획득하는 대신에, 양자화 인덱스치의 편성에 의해 ΔB의 값이 취득되는 테이블을 유지하고, 양자화 인덱스치의 편성으로부터 이 테이블을 이용해 ΔB의 값을 직접 획득하는 것이 가능하다.
[0182] 다음으로, ΔB의 값은 변수 B에 가산된다 (단계 S106). 이 때, ΔB의 값이 0인 경우에는, 변수 B에 0을 가산하는 대신에, 가산하지 않게 제어하는 것이 가능하다.
[0183] 다음으로, 차원의 번호 n 가 차원수 N에 도달했는지 여부를 조사하고 (단계 S108), 도달하지 않는 경우에 처리는 단계 S112로 이행하는 한편, 도달한 경우에는, 그 때의 변수 B의 값을 동일성 척도 (유사도를 나타내는 척도) 로서 출력 하고 (단계 S110), 처리를 종료한다.
[0184] 단계 112에서는, 차원 결정 수단 (101) 이, 취득하는 양자화 인덱스의 차원으로서 n=n+1로부터 다음의 차원을 결정해, 양자화치 취득 수단 (102 및 103) 에 공급한다. 그리고, 처리는 재차 단계 S102로 이행한다.
[0185] 또한, 여기서는, 차원 1으로부터 N까지 차례로 추출 처리를 실시하고 있지만, 이것에 한정되지 않고 임의의 차례가 취해질 수도 있음에 유의한다.
[0186] 다음으로, 동일성 척도로서 거리를 사용하는 경우의 동작에 대해 설명한다.
[0187] 도 23은, 조합 수단 (100) 의 동작을 나타내는 다른 플로우차트이다. 도 23의 플로우차트에서도, 양자화 인덱스 벡터의 차원 (의 번호) 을 n로 나타내고, 1으로부터 N까지의 합계 N차원이 존재한다. 또, 거리 척도를 산출하는 변수를 C로 나타낸다.
[0188] 기본적인 플로우는, 도 22의 경우와 같지만, 도 23은 단계 S100, S104, S106, S110가 각각 단계 S200, S204, S206, S210로 교체되는 점이 상이하다.
[0189] 먼저, 단계 S200에서는, 차원 결정 수단 (101) 이, 양자화 인덱스 벡터를 조합하기 위한 최초의 차원으로서 차원 1을 결정해 (n=1), 양자화치 취득 수단 (102 및 103) 에 공급함과 함께, 척도 산출 수단 (104) 에 있어서 변수 C를 0으로 설정한다.
[0190] 단계 S204에서는, 척도 산출 수단 (104) 은, 제1의 양자화 인덱스치와 제2의 양자화 인덱스치로부터, 각각의 양자화 인덱스에 대응하는 특징량 사이의 거리 ΔC를 산출한다. 예를 들어, 양자화 인덱스가 일치하는 경우에는 ΔC=0으로 하고, 그 이외의 경우에는 ΔC=1으로 한다. 혹은, 양자화 인덱스로부터 양자화 전의 특징량의 대표치를 산출하고, 대표치간의 차분이 작을수록 작아지는 값을 ΔC로서 사용해도 된다. 이때, 특징량의 대표치를 산출해 차분을 획득하는 대신에, 양자화 인덱스치의 편성으로부터 ΔC의 값이 획득되는 테이블을 유지하고, 양자화 인덱스치의 편성으로부터 이 테이블을 이용해 ΔC의 값을 직접 획득하는 것도 가능하다.
[0191] 단계 S206에서는, ΔC의 값은 변수 C에 가산된다. 이 때, ΔC의 값이 0의 경우에는, 변수 C에 0을 가산하는 대신에, 가산하지 않게 제어하는 것이 가능하다.
[0192] 단계 S210에서는, 그 때의 변수 C의 값을 동일성 척도 (거리를 나타내는 척도) 로서 출력 해, 처리를 종료한다.
[0193] 그 이외의 단계에 대해서는, 도 22의 경우와 같다. 단, 단계 S108에서 차원의 번호 n가 차원수 N에 도달한 경우에는, 처리는 단계 S210로 이행한다.
[0194] 또한, 여기서는, 차원 1으로부터 N까지 차례로 추출 처리를 실시하고 있지만, 이것에 한정되지 않고 임의의 차례가 취해질 수도 있음에 유의한다.
[0195] 다음으로, 제1의 양자화 인덱스치와 제2의 양자화 인덱스치로, 「양쪽 모두의 양자화 인덱스가 0」인 차원을 제외해, 동일성 척도로서 유사도를 사용하는 경우의 동작에 대해 설명한다.
[0196] 도 24는, 조합 수단 (100) 의 동작을 나타내는 다른 플로우차트이다. 도 24의 플로우차트에서도, 양자화 인덱스 벡터의 차원 (의 번호) 을 「n」 으로 나타내고, 1로부터 N까지의 합계 N 차원이 존재한다. 또, 유사도를 산출하는 변수를 B로 나타내고, 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원을 카운트하기 위한 변수를 A로 나타낸다.
[0197] 먼저, 차원 결정 수단 (101) 은, 양자화 인덱스 벡터를 조합하기 위한 최초의 차원으로서 차원 1을 결정하고 (n=1), 양자화치 취득 수단 (102 및 103) 에 공급함과 함께, 척도 산출 수단 (104) 에 있어서 변수 A 및 B를 0에 설정하고 (단계 S300), 그 다음 단계 S102로 이행한다.
[0198] 단계 S102는 도 22의 경우와 같고, 단계 S102가 종료한 후, 처리는 단계 S314로 이행한다.
[0199] 단계 S314에서는, 척도 산출 수단 (104) 는, 제1의 양자화 인덱스치와 제2의 양자화 인덱스치 양쪽 모두가 0인지 여부를 조사한다. 양쪽 모두의 값이 0인 경우에는, 처리는 단계 S108로 이행하고, 어느 한쪽이 0이 아닌 경우에는, 변수 A의 값을 1만큼 증분시키고 (단계 S316), 처리는 단계 S104로 이행한다.
[0200] 단계 S104, S106, S108, S112의 처리는 도 22의 경우와 같다. 단계 S108에서 차원의 번호 n가 차원수 N에 도달한 경우에는, 처리는 단계 S310로 이행한다.
[0201] 단계 S310에서는, 척도 산출 수단 (104) 는, B/A의 값을 산출하고, 그것을 동일성 척도로서 출력하고, 처리를 종료한다. 단, A=0의 경우에는, 척도 산출 수단 (104) 는 미리 결정된 값 (예를 들어 0.5) 을 출력한다.
[0202] 또한, 여기서는, 차원 1으로부터 N까지 차례로 추출 처리를 실시하고 있지만, 이것에 한정되지 않고 임의의 차례가 취해질 수도 있음에 유의한다. 또, 단락 0064에 기재된 것처럼, 단계 S310에서는, B/A를 산출하는 대신에, D=N-A를 산출하고 B/f(D) (f(D) 는 D의 단조비증가함수) 에 의해 동일성 척도를 산출하는 것이 가능하다. 혹은, 단락 0065에 기재된 것처럼, 동일성 척도를 (B/f(D))+g(D) 로서 산출해도 된다.
[0203] 또, A의 값을 획득하지 않고 D의 값을 직접 산출하는 것도 가능하다. 이 경우의 플로우를 나타냈던 것이 도 26이다. 기본적으로는 도 24와 같지만, 단계 S500에서 A의 대신에 변수 D에 0을 설정하고, 단계 S314에서 양자화 인덱스 양쪽 모두가 0인 경우에 단계 S516에서 D를 1개 늘려 단계 S108로 이행 하고, 어느 한쪽의 양자화 인덱스가 0이 아닌 경우에 단계 S104로 이행하고, 단계 S510에서 B와 D로부터 동일성 척도를 상기 서술한 방법에 의해 산출하는 점이 상이하다.
[0204] 다음으로, 제1의 양자화 인덱스치와 제2의 양자화 인덱스치에 대해, 「양쪽 모두의 양자화 인덱스가 0」인 차원을 제외하고, 동일성 척도로서 거리를 사용하는 경우의 동작에 대해 설명한다.
[0205] 도 25는, 조합 수단 (100) 의 동작을 나타내는 다른 플로우차트이다. 도 25의 플로우차트에서도, 양자화 인덱스 벡터의 차원 (의 번호) 을 「n」 으로 나타내고, 1로부터 N까지의 합계 N 차원이 존재한다. 또, 거리 척도를 산출하는 변수를 C로 나타내고, 「양쪽 모두의 양자화 인덱스가 0」이 아닌 차원을 카운트하기 위한 변수를 A로 나타낸다.
[0206] 기본적인 플로우는, 도 24의 경우와 같지만, 단계 S300, S104, S106, S310가 각각 단계 S400, S204, S206, S410로 교체되는 점이 상이하다.
[0207] 먼저, 단계 S400에서는, 차원 결정 수단 (101) 은, 양자화 인덱스 벡터를 조합하기 위한 최초의 차원으로서 차원 1을 결정하고 (n=1), 그것을 양자화치 취득 수단 (102 및 103) 에 공급함과 함께, 척도 산출 수단 (104) 에 있어서 변수 A 및 변수 C를 0로 설정한다.
[0208] 단계 S204, 단계 S206 에 대해서는, 도 23의 경우와 같다.
[0209] 단계 S410에서는, 척도 산출 수단 (104) 은, C/A의 값을 산출하고, 그것을 동일성 척도로서 출력하고, 처리를 종료한다. 단, A=0의 경우에는, 척도 산출 수단 (104) 는 미리 결정된 값 (예를 들어 0.5) 을 출력한다.
[0210] 그 이외의 단계에 대해서는, 도 24의 경우와 같다. 단, 단계 S108에서 차원의 번호 n가 차원수 N에 도달한 경우에는 처리는 단계 S410로 이행한다.
[0211] 또한, 여기서는, 차원 1으로부터 N까지 차례로 추출 처리를 실시하고 있지만, 이것에 한정되지 않고 임의의 차례가 취해질 수도 있음에 유의한다. 또, 도 23의 단계 S310의 경우와 마찬가지로, C/A를 산출하는 대신에, D=N-A를 획득하고 C/f(D) 등에 의해 동일성 척도를 산출해도 된다. 또, 도 26에서처럼, A의 값을 산출하지 않고 D의 값을 직접 산출하는 것도 가능하다.
[0212] 이상, 상기 각 실시형태를 참조해 본 발명을 설명했지만, 본 발명은, 상기 서술한 실시형태로 한정되는 것은 아니다. 본 발명의 구성이나 상세는, 본 발명의 범위내에서 당업자가 이해할 수 있는 여러가지 변경이 이루어질 수 있음이 이해될 것이다.
[0213] 또한, 본 발명은, 2009년 3월 13일에 특허 출원된 일본 특허출원 2009-61021, 및 2009년 4월 14일에 특허 출원된 일본 특허출원 2009-97863에 근거하여 우선권 주장의 이익을 향수하는 것이어서, 당해 특허 출원에 기재된 내용은, 모두 본 명세서에 포함되는 것으로 한다.
부호의 설명
[0214] 1…차원 결정 수단
2…추출 영역 취득 수단
3, 3 A…영역 특징량 산출 수단
31, 31 A…제1의 영역 특징량 산출 수단
32, 32 A…제2의 영역 특징량 산출 수단
4, 4 B…비교 수단
41…대소 비교 수단
42, 44…양자화 수단
43…차분치 산출 수단
45…양자화 경계 결정 수단
5…영역 특징량 산출 방법 취득 수단
6…비교 방법 취득 수단
Claims (23)
- 화상중의, 복수의 부분 영역 쌍의, 각 부분 영역으로부터 영역 특징량을 추출하는 단계; 부분 영역 쌍 마다, 쌍을 형성하는 2개의 부분 영역의 상기 영역 특징량 사이의 차분치를 양자화하는 단계로서, 양자화를 수행할 때에는 상기 차분치의 절대치가 미리 결정된 값 보다 작은 경우에는 특정의 양자화치로 양자화하는, 상기 양자화하는 단계; 및 상기 부분 영역 쌍 마다 산출된 양자화치를 요소로 한 집합을 상기 화상의 식별에 사용하는 화상 식별자로서 사용하는 단계를 포함하는 생성 방법에 의해 생성된, 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를 조합하는 조합 수단을 포함하고,
상기 조합 수단은 상기 제1의 화상의 화상 식별자와 상기 제2의 화상의 화상 식별자를, 상기 특정의 양자화치인 요소의 가중이 작아지는 방식으로 조합하는, 화상 식별자 조합 장치. - 제 1 항에 있어서,
상기 조합 수단은, 상기 제1의 화상의 화상 식별자와 상기 제2의 화상의 화상 식별자의 대응하는 요소를 비교하고, 상기 제1의 화상과 상기 제2의 화상이 동일한 정도를 나타내는 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 1 항 또는 제 2 항에 있어서,
동일성 척도 산출 방법으로서, 양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소간의 비교 결과의 가중이 작아지는 산출 방법이 사용되는, 화상 식별자 조합 장치. - 제 3 항에 있어서,
상기 조합 수단은, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소의 수를 A로 하고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 한 경우, B/A 또는 C/A의 산출 결과로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 3 항에 있어서,
상기 조합 수단은, 양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소의 수R가 D이고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 하고, 임의의 D에 대해 단조비증가함수를 f(D) 로 한 경우, B/f(D) 또는 C/f(D) 의 값으로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 3 항에 있어서,
상기 조합 수단은, 양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소의 수가 D이고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 한 경우, D의 가중이 B의 가중보다 작은 가중화에 의해 산출된 D와 B를 총합한 값으로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 1 항 또는 제 2 항에 있어서,
동일성 척도 산출 방법으로서, 적어도 하나의 양자화치가 상기 특정의 양자화치인 요소간의 비교 결과의 가중이 작아지는 산출 방법이 사용되는, 화상 식별자 조합 장치. - 제 7 항에 있어서,
상기 조합 수단은, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소의 수를 A로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 한 경우, B/A 또는 C/A의 산출 결과로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 7 항에 있어서,
상기 조합 수단은, 적어도 하나의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 하고, 임의의 D에 대해 단조비증가함수를 f(D) 로 한 경우, B/f(D) 또는 C/f(D) 의 값으로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 7 항에 있어서,
상기 조합 수단은, 적어도 하나의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 한 경우, D의 가중이 B의 가중보다 작은 가중화에 의해 산출된 D와 B를 총합한 값으로부터 상기 동일성 척도를 산출하는, 화상 식별자 조합 장치. - 제 1 항 내지 제 10 항 중 어느 한 항에 있어서,
상기 복수의 부분 영역 쌍은, 상기 쌍의 2개의 부분 영역의 형상의 편성과 상기 쌍의 2개의 부분 영역 사이의 상대적인 위치 관계 양쪽 모두가, 다른 적어도 1개의 부분 영역 쌍과는 상위한 1이상의 부분 영역 쌍을 포함하는, 화상 식별자 조합 장치. - 화상중의, 복수의 부분 영역 쌍의, 각 부분 영역으로부터 영역 특징량을 추출하는 단계; 부분 영역 쌍 마다, 쌍을 형성하는 2개의 부분 영역의 상기 영역 특징량 사이의 차분치를 양자화하는 단계로서, 양자화를 수행할 때에는 상기 차분치의 절대치가 미리 결정된 값 보다 작은 경우에는 특정의 양자화치로 양자화하는, 상기 양자화하는 단계; 및 상기 부분 영역 쌍 마다 산출된 양자화치를 요소로 한 집합을 상기 화상의 식별에 사용하는 화상 식별자로서 사용하는 단계를 포함하는 생성 방법에 의해 생성된, 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를 조합하는 단계를 포함하고,
상기 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를 조합하는 단계는, 상기 특정의 양자화치인 요소의 가중이 작아지는 방식으로 수행되는, 화상 식별자 조합 방법. - 제 12 항에 있어서,
상기 제1의 화상의 화상 식별자와 상기 제2의 화상의 화상 식별자와의 대응하는 요소를 비교하는 단계, 및 상기 제1의 화상과 상기 제2의 화상이 동일한 정도를 나타내는 동일성 척도를 산출하는 단계를 더 포함하는, 화상 식별자 조합 방법. - 제 12 항 또는 제 13 항에 있어서,
동일성 척도 산출 방법으로서, 양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소간의 비교 결과의 가중이 작아지는 산출 방법이 사용되는, 화상 식별자 조합 방법. - 제 14 항에 있어서,
적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소의 수를 A로 하고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 한 경우, 상기 동일성 척도는 B/A 또는 C/A의 산출 결과로부터 산출되는, 화상 식별자 조합 방법. - 제 14 항에 있어서,
양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 하고, 임의의 D에 대해 단조비증가함수를 f(D) 로 한 경우, 상기 동일성 척도는 B/f(D) 또는 C/f(D) 의 값으로부터 산출되는, 화상 식별자 조합 방법. - 제 14 항에 있어서,
양쪽 모두의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 적어도 하나의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 한 경우, 상기 동일성 척도는 D의 가중이 B의 가중보다 작은 가중화에 의해 산출된 D와 B를 총합한 값으로부터 산출되는, 화상 식별자 조합 방법. - 제 12 항 또는 제 13 항에 있어서,
동일성 척도 산출 방법으로서, 적어도 하나의 양자화치가 상기 특정의 양자화치인 요소간의 비교 결과의 가중이 작아지는 산출 방법이 사용되는, 화상 식별자 조합 방법. - 제 18 항에 있어서,
양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소의 수를 A로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 한 경우, 상기 동일성 척도는 B/A 또는 C/A의 산출 결과로부터 산출되는, 화상 식별자 조합 방법. - 제 18 항에 있어서,
적어도 하나의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 하고, 양자화치가 일치하지 않는 요소의 수를 C로 하고, 임의의 D에 대해 단조비증가함수를 f(D) 로 한 경우, 상기 동일성 척도는 B/f(D) 또는 C/f(D) 의 값으로부터 산출되는, 화상 식별자 조합 방법. - 제 18 항에 있어서,
적어도 하나의 양자화치가 상기 특정의 양자화치인 요소의 수를 D로 하고, 양쪽 모두의 양자화치가 상기 특정의 양자화치가 아닌 요소 중 양자화치가 일치하는 요소의 수를 B로 한 경우, 상기 동일성 척도는 D의 가중이 B의 가중보다 작은 가중화에 의해 산출된 D와 B를 총합한 값으로부터 산출되는, 화상 식별자 조합 방법. - 제 12 항 내지 제 21 항 중 어느 한 항에 있어서,
상기 복수의 부분 영역 쌍은, 상기 쌍의 2개의 부분 영역의 형상의 편성과 상기 쌍의 2개의 부분 영역 사이의 상대적인 위치 관계 양쪽 모두가, 다른 적어도 1개의 부분 영역 쌍과는 상위한 1이상의 부분 영역 쌍을 포함하는, 화상 식별자 조합 방법. - 컴퓨터로 하여금,
화상중의, 복수의 부분 영역 쌍의, 각 부분 영역으로부터 영역 특징량을 추출하는 단계; 부분 영역 쌍 마다, 쌍을 형성하는 2개의 부분 영역의 상기 영역 특징량 사이의 차분치를 양자화하는 단계로서, 양자화를 수행할 때에는 상기 차분치의 절대치가 미리 결정된 값 보다 작은 경우에는 특정의 양자화치로 양자화하는, 상기 양자화하는 단계; 및 상기 부분 영역 쌍 마다 산출된 양자화치를 요소로 한 집합을 상기 화상의 식별에 사용하는 화상 식별자로서 사용하는 단계를 포함하는 생성 방법에 의해 생성된, 제1의 화상의 화상 식별자와 제2의 화상의 화상 식별자를 조합하는 조합 수단으로서 기능하게 하고,
상기 조합 수단은 상기 제1의 화상의 화상 식별자와 상기 제2의 화상의 화상 식별자를, 상기 특정의 양자화치인 요소의 가중이 작아지는 방식으로 조합하는, 프로그램.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009061021 | 2009-03-13 | ||
| JPJP-P-2009-061021 | 2009-03-13 | ||
| JP2009097863 | 2009-04-14 | ||
| JPJP-P-2009-097863 | 2009-04-14 | ||
| PCT/JP2010/001768 WO2010103848A1 (ja) | 2009-03-13 | 2010-03-12 | 画像識別子照合装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20110123769A true KR20110123769A (ko) | 2011-11-15 |
| KR101398272B1 KR101398272B1 (ko) | 2014-06-27 |
Family
ID=42728145
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020117021098A KR101398272B1 (ko) | 2009-03-13 | 2010-03-12 | 화상 식별자 조합 장치 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8270724B2 (ko) |
| EP (1) | EP2360639B1 (ko) |
| JP (1) | JP4735783B2 (ko) |
| KR (1) | KR101398272B1 (ko) |
| CN (1) | CN102349091B (ko) |
| WO (1) | WO2010103848A1 (ko) |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8744193B2 (en) * | 2009-03-13 | 2014-06-03 | Nec Corporation | Image signature extraction device |
| US9015741B2 (en) | 2009-04-17 | 2015-04-21 | Gracenote, Inc. | Method and system for remotely controlling consumer electronic devices |
| US8863165B2 (en) | 2010-11-01 | 2014-10-14 | Gracenote, Inc. | Method and system for presenting additional content at a media system |
| US8526743B1 (en) | 2010-11-01 | 2013-09-03 | Raf Technology, Inc. | Defined data patterns for object handling |
| US9152862B2 (en) * | 2011-09-15 | 2015-10-06 | Raf Technology, Inc. | Object identification and inventory management |
| US9443298B2 (en) | 2012-03-02 | 2016-09-13 | Authentect, Inc. | Digital fingerprinting object authentication and anti-counterfeiting system |
| US8774455B2 (en) | 2011-03-02 | 2014-07-08 | Raf Technology, Inc. | Document fingerprinting |
| US9870517B2 (en) * | 2011-12-08 | 2018-01-16 | Excalibur Ip, Llc | Image object retrieval |
| US9418314B2 (en) * | 2012-01-30 | 2016-08-16 | Nec Corporation | Information processing apparatus and control method and control program thereof, and communication terminal and control method and control program thereof |
| US9041727B2 (en) | 2012-03-06 | 2015-05-26 | Apple Inc. | User interface tools for selectively applying effects to image |
| US9131192B2 (en) | 2012-03-06 | 2015-09-08 | Apple Inc. | Unified slider control for modifying multiple image properties |
| US10282055B2 (en) | 2012-03-06 | 2019-05-07 | Apple Inc. | Ordered processing of edits for a media editing application |
| JP5625196B2 (ja) * | 2012-04-09 | 2014-11-19 | 株式会社モルフォ | 特徴点検出装置、特徴点検出方法、特徴点検出プログラム及び記録媒体 |
| CN103377473B (zh) * | 2012-04-19 | 2017-10-24 | 深圳市世纪光速信息技术有限公司 | 一种图像排重方法和装置 |
| US9501684B1 (en) | 2013-12-13 | 2016-11-22 | Google Inc. | Providing non-destructive editing reconciliation |
| US10621594B2 (en) | 2016-02-19 | 2020-04-14 | Alitheon, Inc. | Multi-level authentication |
| EP3236401A1 (en) | 2016-04-18 | 2017-10-25 | Alitheon, Inc. | Authentication-triggered processes |
| US10614302B2 (en) | 2016-05-26 | 2020-04-07 | Alitheon, Inc. | Controlled authentication of physical objects |
| US10740767B2 (en) | 2016-06-28 | 2020-08-11 | Alitheon, Inc. | Centralized databases storing digital fingerprints of objects for collaborative authentication |
| US10915612B2 (en) | 2016-07-05 | 2021-02-09 | Alitheon, Inc. | Authenticated production |
| US10902540B2 (en) | 2016-08-12 | 2021-01-26 | Alitheon, Inc. | Event-driven authentication of physical objects |
| US10839528B2 (en) | 2016-08-19 | 2020-11-17 | Alitheon, Inc. | Authentication-based tracking |
| EP3435287A3 (en) | 2017-07-25 | 2019-05-01 | Alitheon, Inc. | Model-based digital fingerprinting |
| EP3514715A1 (en) | 2018-01-22 | 2019-07-24 | Alitheon, Inc. | Secure digital fingerprint key object database |
| US10963670B2 (en) | 2019-02-06 | 2021-03-30 | Alitheon, Inc. | Object change detection and measurement using digital fingerprints |
| EP3734506A1 (en) | 2019-05-02 | 2020-11-04 | Alitheon, Inc. | Automated authentication region localization and capture |
| EP3736717A1 (en) | 2019-05-10 | 2020-11-11 | Alitheon, Inc. | Loop chain digital fingerprint method and system |
| CN110245615B (zh) * | 2019-06-17 | 2022-09-13 | 河海大学常州校区 | 一种签名鉴伪方法、系统及存储介质 |
| US11238146B2 (en) | 2019-10-17 | 2022-02-01 | Alitheon, Inc. | Securing composite objects using digital fingerprints |
| EP3859603A1 (en) | 2020-01-28 | 2021-08-04 | Alitheon, Inc. | Depth-based digital fingerprinting |
| US11568683B2 (en) | 2020-03-23 | 2023-01-31 | Alitheon, Inc. | Facial biometrics system and method using digital fingerprints |
| US11341348B2 (en) | 2020-03-23 | 2022-05-24 | Alitheon, Inc. | Hand biometrics system and method using digital fingerprints |
| US11948377B2 (en) | 2020-04-06 | 2024-04-02 | Alitheon, Inc. | Local encoding of intrinsic authentication data |
| US11663849B1 (en) | 2020-04-23 | 2023-05-30 | Alitheon, Inc. | Transform pyramiding for fingerprint matching system and method |
| US11700123B2 (en) | 2020-06-17 | 2023-07-11 | Alitheon, Inc. | Asset-backed digital security tokens |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4739398A (en) * | 1986-05-02 | 1988-04-19 | Control Data Corporation | Method, apparatus and system for recognizing broadcast segments |
| US5157743A (en) * | 1987-10-28 | 1992-10-20 | Canon Kabushiki Kaisha | Image information coding apparatus |
| US5067189A (en) * | 1990-04-11 | 1991-11-26 | Weedling Robert E | Air chamber type patient mover air pallet with multiple control features |
| US5436653A (en) * | 1992-04-30 | 1995-07-25 | The Arbitron Company | Method and system for recognition of broadcast segments |
| US5561873A (en) * | 1994-07-15 | 1996-10-08 | Patient Transfer Systems, Inc. | Air chamber-type patient mover air pallet with multiple control features |
| US6073291A (en) * | 1997-02-21 | 2000-06-13 | Davis; David T. | Inflatable medical patient transfer apparatus |
| DE69940703D1 (de) * | 1998-03-05 | 2009-05-20 | Panasonic Corp | Verfahren zur Bildkodierung, Verfahren zur Bildkodierung/-Dekodierung, Bildkodierer, oder Vorrichtung zur Bildaufzeichnung/-Wiedergabe |
| JP3684148B2 (ja) * | 2000-10-20 | 2005-08-17 | キヤノン株式会社 | 画像処理方法及びその装置、記憶媒体 |
| KR100450793B1 (ko) * | 2001-01-20 | 2004-10-01 | 삼성전자주식회사 | 영역 분할된 영상의 영역 특징치 정합에 기초한객체추출장치 및 그 방법 |
| JP4190739B2 (ja) * | 2001-02-19 | 2008-12-03 | 日本電気株式会社 | 画像特徴量生成装置および方法、ならびに画像特徴量生成プログラムを記録した記憶媒体 |
| JP4161659B2 (ja) * | 2002-02-27 | 2008-10-08 | 日本電気株式会社 | 画像認識システム及びその認識方法並びにプログラム |
| US7643684B2 (en) * | 2003-07-15 | 2010-01-05 | Samsung Electronics Co., Ltd. | Apparatus for and method of constructing multi-view face database, and apparatus for and method of generating multi-view face descriptor |
| US6898809B2 (en) * | 2003-08-11 | 2005-05-31 | Woodlark Circle, Inc. | Air mattress with single perimeter seam |
| US7712170B2 (en) * | 2003-08-11 | 2010-05-11 | Woodlark Circle, Inc. | Single patient, personal use air mattress having a single perimeter seam |
| US7379627B2 (en) * | 2003-10-20 | 2008-05-27 | Microsoft Corporation | Integrated solution to digital image similarity searching |
| US7986813B2 (en) * | 2004-03-03 | 2011-07-26 | Nec Corporation | Object pose estimation and comparison system using image sharpness differences, object pose estimation and comparison method using image sharpness differences, and program therefor |
| JP2006268825A (ja) * | 2005-02-28 | 2006-10-05 | Toshiba Corp | オブジェクト検出装置、学習装置、オブジェクト検出システム、方法、およびプログラム |
| US20060193520A1 (en) * | 2005-02-28 | 2006-08-31 | Takeshi Mita | Object detection apparatus, learning apparatus, object detection system, object detection method and object detection program |
| JP2007140684A (ja) * | 2005-11-15 | 2007-06-07 | Toshiba Corp | 画像処理装置、方法、プログラム |
| JP2007293438A (ja) * | 2006-04-21 | 2007-11-08 | Omron Corp | 特徴量取得装置 |
| US7805011B2 (en) * | 2006-09-13 | 2010-09-28 | Warner Bros. Entertainment Inc. | Method and apparatus for providing lossless data compression and editing media content |
| JP2009061021A (ja) | 2007-09-05 | 2009-03-26 | Univ Kansai | 分岐型生分解性ポリエステルを含む生体内留置物 |
| JP2009097863A (ja) | 2007-10-12 | 2009-05-07 | Toshiba Corp | 機器位置検出システム |
-
2010
- 2010-03-12 WO PCT/JP2010/001768 patent/WO2010103848A1/ja active Application Filing
- 2010-03-12 KR KR1020117021098A patent/KR101398272B1/ko active IP Right Grant
- 2010-03-12 JP JP2011503731A patent/JP4735783B2/ja active Active
- 2010-03-12 CN CN201080011021.3A patent/CN102349091B/zh active Active
- 2010-03-12 EP EP10750604.0A patent/EP2360639B1/en active Active
- 2010-03-12 US US13/131,798 patent/US8270724B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US8270724B2 (en) | 2012-09-18 |
| JP4735783B2 (ja) | 2011-07-27 |
| WO2010103848A1 (ja) | 2010-09-16 |
| US20110235920A1 (en) | 2011-09-29 |
| CN102349091A (zh) | 2012-02-08 |
| KR101398272B1 (ko) | 2014-06-27 |
| EP2360639A4 (en) | 2012-05-02 |
| CN102349091B (zh) | 2014-08-06 |
| EP2360639A1 (en) | 2011-08-24 |
| EP2360639B1 (en) | 2016-11-16 |
| JPWO2010103848A1 (ja) | 2012-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101398272B1 (ko) | 화상 식별자 조합 장치 | |
| US9042656B2 (en) | Image signature extraction device | |
| KR101355258B1 (ko) | 이미지 시그니처 매칭 장치 | |
| KR101353104B1 (ko) | 이미지 시그니처 추출 장치 | |
| KR101344627B1 (ko) | 화상 식별자 추출 장치 | |
| KR101411127B1 (ko) | 화상 식별자 추출 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20170421 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20180418 Year of fee payment: 5 |