KR101357690B1 - 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 - Google Patents
방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 Download PDFInfo
- Publication number
- KR101357690B1 KR101357690B1 KR1020120114951A KR20120114951A KR101357690B1 KR 101357690 B1 KR101357690 B1 KR 101357690B1 KR 1020120114951 A KR1020120114951 A KR 1020120114951A KR 20120114951 A KR20120114951 A KR 20120114951A KR 101357690 B1 KR101357690 B1 KR 101357690B1
- Authority
- KR
- South Korea
- Prior art keywords
- phase difference
- array
- antenna
- calculating
- interferometer
- Prior art date
Links
Images



Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
- G01S3/46—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
- G01S3/48—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems the waves arriving at the antennas being continuous or intermittent and the phase difference of signals derived therefrom being measured
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/14—Systems for determining direction or deviation from predetermined direction
- G01S3/46—Systems for determining direction or deviation from predetermined direction using antennas spaced apart and measuring phase or time difference between signals therefrom, i.e. path-difference systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S3/00—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received
- G01S3/02—Direction-finders for determining the direction from which infrasonic, sonic, ultrasonic, or electromagnetic waves, or particle emission, not having a directional significance, are being received using radio waves
- G01S3/04—Details
- G01S3/12—Means for determining sense of direction, e.g. by combining signals from directional antenna or goniometer search coil with those from non-directional antenna
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Variable-Direction Aerials And Aerial Arrays (AREA)
Abstract
본 발명의 일 실시예에 따르는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법은, 배열안테나로 수신되는 신호들에 대하여 순시최대시야각(IFOV)의 방위각 및 위상차간 거리를 설정하고, 방향 탐지 장치의 위상비교기에서 출력되는 신호들의 위상차에 대해 위상차 라인의 개수 및 위상차 벡터들을 구하는 단계와, 상기 위상차 벡터들에 대해 모듈러 연산을 수행한 뒤, 이를 이용하여 위상차 행렬을 구하는 단계와, 상기 위상차 행렬을 선형변환하기 위한 변환행렬을 구하고, 변환행렬을 이요하여 선형변환하는 단계와, 선형변환으로 생성된 새 축에서 각 위상차 간의 거리를 구하는 단계 및 각 위상차간 거리가 원하는 위상차간 거리보다 큰 값을 만족하는 안테나 간격을 배열 안테나의 배열 간격으로 산출하는 단계를 포함한다.
Description
본 발명의 일실시예들은 위상비교 방향탐지를 수행하는 인터페로미터 배열안테나의 이격비를 산출하는 방법에 관한 것이다.
일반적인 방향 탐지기는 전파가 도래하는 방향을 측정하는 수신 장치이며, 무선방향 탐지기라고도 한다. 방향 탐지기는 레이더와는 달리 자신은 전파를 발사하지 않는다. 그리고 방향 탐지기는 선박이나 항공기의 안전을 도모하고, 불명(不明)하거나 불법전파의 해명(解明) 또는 감시 등에 사용되고 있다.
이러한 방향 탐지기는 전파를 수신하기 위한 안테나와 수신된 전파를 처리하는 수신기로 구성되어 있다. 방향 탐지기의 안테나와 수신기의 구조는 방향 탐지 방식에 의해 다양한 구조와 형태를 갖게 된다.
다양한 방향 탐지 기술에는 회전 방향 탐지 기술, 진폭비교 방향 탐지 기술, 인터페로미터 기술이라 칭하는 위상비교 방향 탐지 기술 등이 있다.
인터페로메터(Interferomer) 기술은 위상비교 방식을 이용하여 방향 탐지하고 있다. 이는 직류부터 빛에 이르는 넓은 주파수 영역에서 에미터의 위치를 고도로 정확하게 결정할 때 사용되는 기술이다. 인터페로메터의 구성요소는 정합된 두 개의 안테나와 수신기이다. 인터페로메터에서 두 채널의 안테나로 수신된 전파는 각 수신기에서 중간주파수로 변환되어 위상 비교기로 전달된다. 여기서, 두 신호의 도래 방향에 따른 상대적인 위상 각도가 측정된다. 그 상대 위상 각도는 방탐 처리기 즉, 프로세서로 전달되고, 여기에서 두 안테나 방향을 연결한 기준선(baseline)에 대한 전파의 도래각(AOA)이 계산된다. 일반적인 인터페로메터 시스템에서의 프로세서는 기준선(baseline)의 방향 정보(진북 또는 수평면)를 받아들여서 에미터에 대한 진방위나 고각을 결정한다.
본 발명에 관련되는 인터페로미터 배열안테나는 두 개 혹은 그 이상의 개수로 구성된 안테나 시스템으로 안테나간 측정된 상태 위상차를 사용하여 수신신호의 방위각을 결정한다. 특히 조기경보위협탐지, 추적 및 전자정보와 같은 전자전분야의 장비를 포함하는 무선신호원의 도래각을 추정하기 위해 무선신호원의 위상을 비교하여 무선신호원의 방위각을 추정한다. 높은 정확도를 얻기 위해 인터페로미터 어레이의 간격을 구할 때, 모호성을 피하고 요구되는 방향 탐지의 정확도를 충족하기 위한 안테나의 간격은 중요한 요소 중의 하나이다.
안테나 간격은 신호대 잡음비에 의한 전기적인 위상오차 성분 및 장비의 전기적 위상 부정합에 의한 오차 성분을 고려하여 모호성이 최소화되도록 하는 확률계산에 의해 구하거나, 어레이 안테나가 출력하는 위상차 집합이 IFOV에서 중복발생하지 않도록 하는 서로소를 사용하여 구할 수 있다.
첫번째 방법은 과정이 복잡하고 두번째 방법은 단순하지만 방탐지기에서 발생하는 위상차변이가 고려되지 않는 단점이 있다.
따라서 이들 방법을 보완하여 방향탐지기의 어레이 간격을 구하는 방법이 필요하다.
본 발명의 목적은 위상비교 방향탐지를 수행하는 인터페로미터 배열안테나의 이격비를 구하는 방법을 제공하기 위한 것이다.
이와 같은 본 발명의 해결 과제를 달성하기 위하여, 본 발명의 일 실시예에 따르는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법은, 배열안테나로 수신되는 신호들에 대하여 순시최대시야각(IFOV)의 방위각 및 위상차간 거리를 설정하고, 방향 탐지 장치의 위상비교기에서 출력되는 신호들의 위상차에 대해 위상차 라인의 개수 및 위상차 벡터들을 구하는 단계와, 상기 위상차 벡터들에 대해 모듈러 연산을 수행한 뒤, 이를 이용하여 위상차 행렬을 구하는 단계와, 상기 위상차 행렬을 선형변환하기 위한 변환행렬을 구하고, 변환행렬을 이요하여 선형변환하는 단계와, 선형변환으로 생성된 새 축에서 각 위상차 간의 거리를 구하는 단계 및 각 위상차간 거리가 원하는 위상차간 거리보다 큰 값을 만족하는 안테나 간격을 배열 안테나의 배열 간격으로 산출하는 단계를 포함한다.
본 발명과 관련한 일 예에 따르면, 상기 배열안테나가 3소자 선형배열인 경우는 상기 위상 비교기로부터 출력되는 2개의 위상차를 사용하고, 4소자 선형배열인 경우는 3개의 위상차를 사용할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 위상차벡터는 수학식  을 사용하여
을 사용하여  을 구하며, 상기 위상차벡터는
을 구하며, 상기 위상차벡터는  의 배수로 이루어질 수 있다.
의 배수로 이루어질 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 순시최대시야각(IFOV)의 방위각을  내에서 설정할 수 있다.
내에서 설정할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 모듈러 연산은 3소자 배열 및 4소자 배열에서 순시최대시야각이  영역에서는
영역에서는  를 수행하고, 순시최대시야각이
를 수행하고, 순시최대시야각이  영역에서는
영역에서는  을 수행할 수 있다.
을 수행할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 선형변환은 3소자 배열에서는 수학식  를 사용할 수 있다.
를 사용할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 변환행렬은  이며, 여기서 α는
이며, 여기서 α는  를 만족할 수 있다.
를 만족할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 선형변환은 4소자 배열에서는  를 사용할 수 있다.
를 사용할 수 있다.
본 발명과 관련한 일 예에 따르면, 상기 변환행렬은 , ,
, ,  이며, 여기서, α와 β는
이며, 여기서, α와 β는  ,
,  을 만족할 수 있다.
을 만족할 수 있다.
본 발명과 관련한 일 예에 따르면, 위상차간 거리는  ,
,  ,
,  를 사용할 수 있다.
를 사용할 수 있다.
본 발명과 관련한 일 예에 따르면, 각 위상차간 거리가 원하는 위상차간 거리(R)보다 큰 값을 만족하기 위해 수학식 를 사용할 수 있다.
를 사용할 수 있다.
본 발명의 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법은 시스템의 복잡성 혹은 탑재플랫폼에 의한 영향에도 불구하고, 보다 용이하게 배열 안테나의 안테나 간격을 설정할 수 있다.
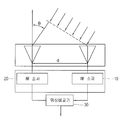
도 1은 2소자 인터페로미터 방향탐지 장치의 구성도.
도 2a는 3소자 선형배열에서 2개의 위상차출력에 의한 위상차도(모듈러 변환을 수행하지 않았을 경우).
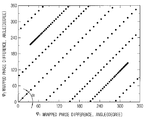
도 2b는 3소자 선형배열에서 2개의 위상차출력에 의한 위상차도(모듈러 변환을 수행한 경우).
도 2c는 3소자 선형배열에서 2개의 위상차출력에 대해 선형변환하여 나타낸 위상차도.
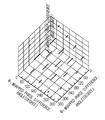
도 3a는 4소자 선형배열에서 3개의 위상차출력에 의한 위상차도(모듈러 변환을 수행한 경우).
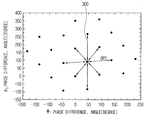
도 3b는 4소자 선형배열에서 3개의 위상차출력에 대해 선형변환하여 나타낸 위상차도.
도 4는 본 발명에 따르는 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법의 순서도.
도 2a는 3소자 선형배열에서 2개의 위상차출력에 의한 위상차도(모듈러 변환을 수행하지 않았을 경우).
도 2b는 3소자 선형배열에서 2개의 위상차출력에 의한 위상차도(모듈러 변환을 수행한 경우).
도 2c는 3소자 선형배열에서 2개의 위상차출력에 대해 선형변환하여 나타낸 위상차도.
도 3a는 4소자 선형배열에서 3개의 위상차출력에 의한 위상차도(모듈러 변환을 수행한 경우).
도 3b는 4소자 선형배열에서 3개의 위상차출력에 대해 선형변환하여 나타낸 위상차도.
도 4는 본 발명에 따르는 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법의 순서도.
이하, 본 발명에 관련된 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법에 대하여 도면을 참조하여 보다 상세하게 설명한다. 이하의 설명에서 사용되는 구성요소에 대한 접미사 "모듈" 및 "부"는 명세서 작성의 용이함만이 고려되어 부여되거나 혼용되는 것으로서, 그 자체로 서로 구별되는 의미 또는 역할을 갖는 것은 아니다. 본 명세서에서는 서로 다른 실시예라도 동일·유사한 구성에 대해서는 동일·유사한 참조번호를 부여하고, 그 설명은 처음 설명으로 갈음한다. 본 명세서에서 사용되는 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다.
본 발명은 위상비교 방향탐지를 수행하는 인터페로미터 어레이 안테나 간격을 구하는 방법에 적용된다.
위상비교 방향탐지장치는 수신되는 무선신호의 위상차를 비교하여 방향을 추정한다. 도 1은 일반적인 두 개의 안테나를 사용한 인터페로미터 배열안테나를 도시한 것이다. 안테나에 수신된 신호는 RF소자(10, 20)와 같은 RF부품을 통과한 후 위상비교기(30)에서 두 안테나의 위상차를 출력한다. 이 때 출력되는 위상차는 수학식 1과 같이 주어진다.

여기서, λ는 파장, d는 안테나간 거리, θ는 무신신호의 입사각이다. 또한, 위상차는±2π마다 반복되므로 복수의 안테나를 구비하는 다중 인터페로미터의 위상차는 수학식 2와 같이 나타내어 질 수 있다.

여기서, fix(x) 는 0에 가장 가까운 정수로 x에 올림을 한 값이다. 그리고, 순시 시야각(IFOV: instantaneous field of view)은  로 제한된다. 또한, 전기적인 위상각(φ)은 위상비교기에서 모듈로 수행(mod2π)에 의해 출력되므로, 수학식 3과 같이 주어진다.
로 제한된다. 또한, 전기적인 위상각(φ)은 위상비교기에서 모듈로 수행(mod2π)에 의해 출력되므로, 수학식 3과 같이 주어진다.
여기서, n은 안테나 간격인덱스이다. ψ는 위상비교기(30)에서 모듈로 수행(mod2π)후 출력되는 위상차이다. 그리고, n+1개의 안테나를 사용하는 인터페로미터 선형배열에서, 각각의 위상차비는 수학식 3에 의해 수학식 4와 같이 나타내어진다.

모듈러 변환을 수행하지 않았을 때, 3개 소자 선형배열(3개의 안테나 소자를 구비하여 형성되는 배열 안테나)에서 2개의 위상차 출력에 대한 위상차도는 도 2a와 같이 나타내어진다.
이하 본 발명의 실시예에 따르는 방향탐지용 인터페로미터 배열 안테나의 안테나 소자간 이격비 산출방법을 살펴보기로 한다.
인터페로미터 배열 안테나의 이격비 산출을 위한 첫 단계(S100)는 방향 탐지 장치의 위상비교기(30)에서 출력하는 각 위상차의 모듈러 정수 및 위상차벡터를 구하는 단계이다. 각 위상차의 모듈러 정수는 수학식 2를 사용하여 구할 수 있다.
도 2b는 위상차  및
및  에 대해
에 대해  모듈러 연산을 수행한 위상차 평면도이다. 도 2a에서, 위상차
모듈러 연산을 수행한 위상차 평면도이다. 도 2a에서, 위상차  또는
또는  는 모듈러 수행후 출력되므로, 위상차라인은 위상차가 ±2π의 배수일 때마다 발생된다. 따라서, 위상차
는 모듈러 수행후 출력되므로, 위상차라인은 위상차가 ±2π의 배수일 때마다 발생된다. 따라서, 위상차  이 ±2π의 배수일 때마다 이에 대응하는 위상차
이 ±2π의 배수일 때마다 이에 대응하는 위상차  는 수학식 4를 이용하여 구할 수 있다. 또한, 위상차
는 수학식 4를 이용하여 구할 수 있다. 또한, 위상차  가 ±2π가 될 때마다 이에 대응하는 위상차
가 ±2π가 될 때마다 이에 대응하는 위상차  는 수학식 4를 이용하여 구할 수 있다.
는 수학식 4를 이용하여 구할 수 있다.
모호성없는 배열간격을 계산하기 위해, 모듈러 연산 후 생성된 라인은 겹쳐지지 않도록 하고, 라인의 거리가 DF에서 요구하는 위상차오차를 만족하도록 해야 한다. 이렇게 하기 위해, 위상차라인마다 위상차를 샘플하여 새로운 좌표계로 변환한 후 배열 간격은 새로운 좌표계에서 구한다. 또한, 위상차가 생성한 라인의 개수는 수학식 2에 의해 구할 수 있다. 수학식 2에서 위상차  에 대한 정수는
에 대한 정수는  이고, 위상차
이고, 위상차  에 대한 정수는
에 대한 정수는  이다.
이다.
위상차 데이터를 얻기 위해 IFOV는 0[도]를 기준으로 하여 두 개의 영역으로 나누고, 0은  와
와  로 나눈다.
로 나눈다.
IFOV가  영역에서 수학식 2로부터 위상차
영역에서 수학식 2로부터 위상차  와
와  에 해당되는 정수
에 해당되는 정수  와
와  를 구할 수 있다. IFOV가 최대일 때, 각각의 출력 위상차는
를 구할 수 있다. IFOV가 최대일 때, 각각의 출력 위상차는  ,
,  이므로, 이 영역에서 생성되는 위상차 라인의 수는
이므로, 이 영역에서 생성되는 위상차 라인의 수는  이다. 또한,
이다. 또한, 일 때 동 라인의 수는 동일하다.
일 때 동 라인의 수는 동일하다.
따라서, IFOV가  영역에서 생성되는 총 위상차라인의 수는
영역에서 생성되는 총 위상차라인의 수는  이며 필요한 위상차 데이터의 수도 동일하다.
이며 필요한 위상차 데이터의 수도 동일하다.
3개 소자 선형배열에서 2개의
위상차
출력을 사용하는 경우
IFOV가  영역에서 위상차
영역에서 위상차  은
은  번 2π를 반복한다. 따라서,
번 2π를 반복한다. 따라서,  를 포함하는 위상차 벡터는
를 포함하는 위상차 벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는 로 표현할 수 있다.
로 표현할 수 있다.
위상차  은
은  를
를  번 반복한다. 따라서, 위상차 벡터는
번 반복한다. 따라서, 위상차 벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  로 표현할 수 있다.
로 표현할 수 있다.
IFOV가  영역에서 위상차
영역에서 위상차 은
은  번
번  를 반복한다. 따라서,
를 반복한다. 따라서,  를 포함하는 위상차 벡터는
를 포함하는 위상차 벡터는 이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는 로 표현할 수 있다.
로 표현할 수 있다.
위상차  은
은  를
를  번 반복한다. 따라서, 위상차벡터는
번 반복한다. 따라서, 위상차벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  로 표현할 수 있다.
로 표현할 수 있다.
4개 소자 선형배열에서 3개의
위상차
출력을 사용하는 경우
IFOV가  영역에서
영역에서
위상차 은
은  를
를  번 반복한다. 따라서,
번 반복한다. 따라서,  를 포함하는 위상차 벡터는
를 포함하는 위상차 벡터는 이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는 및
및  로 표현할 수 있다.
로 표현할 수 있다.
위상차 은
은  를
를  번 반복한다. 따라서, 위상차벡터는
번 반복한다. 따라서, 위상차벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  및
및  로 표현할 수 있다.
로 표현할 수 있다.
위상차 는
는  를
를  번 반복한다. 따라서, 위상차벡터는
번 반복한다. 따라서, 위상차벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  및
및  로 표현할 수 있다.
로 표현할 수 있다.
IFOV가  영역에서
영역에서
위상차 은
은  를
를  번 반복한다. 따라서,
번 반복한다. 따라서,  를 포함하는 위상차 벡터는
를 포함하는 위상차 벡터는 이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는 및
및  로 표현할 수 있다.
로 표현할 수 있다.
위상차 은
은  를
를  번 반복한다. 따라서, 위상차벡터는
번 반복한다. 따라서, 위상차벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  및
및  로 표현할 수 있다.
로 표현할 수 있다.
위상차 는
는  를
를  번 반복한다. 따라서, 위상차벡터는
번 반복한다. 따라서, 위상차벡터는  이고, 이에 대응하는 위상차는
이고, 이에 대응하는 위상차는  및
및  로 표현할 수 있다.
로 표현할 수 있다.
두 번째 단계(S200)는 안테나 간격에 의해 생성된 각 위상차벡터에 대한 모듈러 연산을 수행하는 단계이다.
도 1에 도시된 바와 같이, 도시한 위상비교기(30)는  모듈로 연산을 수행하여 위상차를 출력한다. 즉, 위상비교기에서는 도 2a의 언랩(Unwrapped)된 위상차를 도 2b와 같이 랩(Wrapped)된 위상차로 출력한다. 따라서, 위상차벡터에 대해 모듈러 변환을 수행하여 위상차 벡터를 구할 수 있다.
모듈로 연산을 수행하여 위상차를 출력한다. 즉, 위상비교기에서는 도 2a의 언랩(Unwrapped)된 위상차를 도 2b와 같이 랩(Wrapped)된 위상차로 출력한다. 따라서, 위상차벡터에 대해 모듈러 변환을 수행하여 위상차 벡터를 구할 수 있다.
3소자 배열을 사용하는 위상차벡터에 대해, IFOV가  영역에서 구한 위상차벡터
영역에서 구한 위상차벡터  에 대해서는 각각
에 대해서는 각각  를 수행하여, Wrapped 된
를 수행하여, Wrapped 된  의 위상차 벡터를 구한다.
의 위상차 벡터를 구한다.
IFOV가  영역에서 구한 위상차는 IFOV가
영역에서 구한 위상차는 IFOV가  에서의 위상차와 역으로 생성되기 때문에, 위상차 벡터
에서의 위상차와 역으로 생성되기 때문에, 위상차 벡터  에 대해서는 각각
에 대해서는 각각  를 수행하여, Wrapped 된
를 수행하여, Wrapped 된  위상차벡터를 구한다.
위상차벡터를 구한다.
그리고, 4소자 배열을 사용하여 3개의 위상차를 사용하는 위상차벡터에 대해 IFOV가  영역에서 구한 위상차벡터
영역에서 구한 위상차벡터  ,
, ,
, 에 대해서는 각각
에 대해서는 각각  를 수행하여, Wrapped 된
를 수행하여, Wrapped 된  ,
, ,
, 의 위상차벡터를 구한다.
의 위상차벡터를 구한다.
IFOV가  영역에서 구한 위상차는 IFOV가
영역에서 구한 위상차는 IFOV가  에서의 위상차와 역으로 생성되기 때문에, 위상차벡터
에서의 위상차와 역으로 생성되기 때문에, 위상차벡터  ,
, ,
, 에 대해서는 각각
에 대해서는 각각  를 수행하여, Wrapped 된
를 수행하여, Wrapped 된  ,
, ,
, 의 위상차벡터를 구한다.
의 위상차벡터를 구한다.
세 번째 단계(S210)는, 위상차 벡터로 위상차 행렬을 구하는 단계이다.
3소자 선형배열이 경우 랩(Wrapped)된 위상차벡터는 선형변환을 위해 X축 및 Y축의 위상차벡터는 행렬로 나타낼 수 있으며 수학식 5와 같다.

4소자 선형배열인 경우 선형변환을 위해 Z축의 위상차 벡터를 추가하여 위상차 행렬로 나타낼수 있으며 수학식 6과 같다.

네 번째 단계(S300)는 각각의 위상차 행렬을 선형변환하기 위해 변환행렬을 구하는 단계이다.
도 2b는 랩(Wrapped)된 위상차를 도시한 것이다. 이 때 위상차에 의해 발생된 직선의 기울기는 α이고, 이 기울기만큼 시계반대방향으로 회전을 수행하면 도 2c와 같이 구할 수 있으므로, 기울기 각도 α에 의해 위상차행렬은 회전변환을 수행할 수 있으므로, 이러한 변환행렬은 수학식 7과 같다.

여기서,  이다.
이다.
또한, 4개의 안테나 배열에서 도 3a에 도시된 위상차직선은 도 3b에 도시된 바와 같이 위상차점으로 변환을 수행할 수 있도록 하기 위해, 오일러각(euler angle)을 사용한다. 위상차  에 대해
에 대해  각 변환 및
각 변환 및  에 대해
에 대해  각 변환을 수행한다.
각 변환을 수행한다.
이때, 4개 소자배열에서는 적용되는 변환 행렬은 수학식 8과 같다.


여기서  ,
,  이다.
이다.
다섯 번째 단계(S400)는 변환행렬을 사용하여 위상차 행렬을 선형변환하는 단계이다.
3개의 안테나 배열에서 수학식 5의 위상차 행렬은 수학식 7의 변환행렬에 의해 선형변환되며, 이는 다음의 수학식 9와 같다.
3개의 안테나 배열에서 샘플링된 위상차행렬에 대해 축변환을 수행하면 도 2c와 같이 위상차 직선을 얻을 수 있으며, 행렬V의 원소는 새로운 좌표계에서 생성되는 위상차로 구성된다. 도 2c에서 가로축은 모호성을 나타내고, 세로축은 방향탐지장치의 위상차 해상도를 나타내기 때문에 수학식 8의 행렬V에서 두 번째 행벡터는 모호성과 관련이 없음을 알 수 있다. 따라서, 행렬 V의 첫 번째 행벡터소자의 거리가 일정이상이 되는 값을 선택하면, 3소자 배열을 사용하는 인터페로미터 방향탐지장치는 모호성이 발생하지 않는다.
4개의 안테나 배열에서 수학식 6의 위상차행렬은 수학식 8의 변환행렬에 의해 선형변환되며 수학식 10과 같다.
4개의 안테나 배열에서 샘플링된 위상차행렬의 축변환을 수행하여 그림3a와 같이 여러개의 위상차 직선이 발생하였다. 선형변환된 행렬 는 도 3b와 같으며, 그림3b는 선형변환 후 (
는 도 3b와 같으며, 그림3b는 선형변환 후 ( )평면에 투영된 위상차 도이며 직선은 점으로 투영된다. 따라서, 3개의 안테나 배열과 동일하게 (
)평면에 투영된 위상차 도이며 직선은 점으로 투영된다. 따라서, 3개의 안테나 배열과 동일하게 ( )평면에서 위상차로 생성된 점과 점거리는 모호성간격을 나타내며,
)평면에서 위상차로 생성된 점과 점거리는 모호성간격을 나타내며,  축에 해당되는 위상차는 방향탐지장치의 위상차해상도를 나타내기 때문에 수학식 9의 행렬 V에서 세 번째 행벡터는 모호성과 관련이 없음을 알 수 있다. 따라서, 행렬 V의 첫 번째 및 두 번째가 표현하는 점과 점의 거리가 일정이상이 되는 값을 선택하면, 4소자 배열을 사용하는 인터페로미터 방향탐지장치는 모호성이 발생하지 않는다.
축에 해당되는 위상차는 방향탐지장치의 위상차해상도를 나타내기 때문에 수학식 9의 행렬 V에서 세 번째 행벡터는 모호성과 관련이 없음을 알 수 있다. 따라서, 행렬 V의 첫 번째 및 두 번째가 표현하는 점과 점의 거리가 일정이상이 되는 값을 선택하면, 4소자 배열을 사용하는 인터페로미터 방향탐지장치는 모호성이 발생하지 않는다.
여섯 번째 단계(S500)는 선형변환으로 생성된 새 축에서 각 위상차간 거리(DPD: Distance between Phase Difference)를 구하는 단계이다.
도 2c와 도 3b에서 보는 바와 같이, 3소자 배열은 선형변환에 의한 새 축에서 각 위상차 직선 간의 거리(200)가 위상차간 거리가 되고, 4소자 배열은 선형변환에 의한 새 축에서 각 위상차 점 간의 거리(300)가 위상차간 거리 (DPD)가 된다. 각 위상차간 간격은 수학식 11과 같다.

여기서, l 이 1이면 3소자배열이고, l 이 2이면 4소자배열이다.
일곱 번째 단계(S600)는 각 위상차간 거리가 원하는 위상차간 거리(R)보다 큰 값을 만족하는 안테나 간격을 구하는 단계이다. 이것은 수학식 12와 같이 나타내어진다. 즉, 아래의 수학식을 만족하는 위상차간 거리를 배열 안테나의 소자간 안테나 간격으로 산출한다.

이로써 인터페로미터 어레이 안테나 이격비를 산출하는 방법이 완료된다.
표 1은 본 발명에 따르는 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법을 이용하여, 3소자 및 4소자를 사용하는 인터페로미터 어레이 안테나에 대한 배열간격을 구한 것을 표로 정리한 것이다.
| Three element array |
Four element array |
|||||
|
|
|
|
|
|
|
|
| 0.5 0.6 0.7 0.7 0.8 0.8 0.8 0.9 0.9 0.9 0.9 0.9 0.9 1.0 |
2.9 2.1 2.4 2.5 2.0 2.1 2.8 2.1 2.2 2.3 2.4 3.1 3.2 2.3 |
48.9 49.4 43.2 41.6 66.8 48.0 49.4 47.2 60.5 58.3 42.1 44.6 43.3 43.0 |
0.7 0.7 0.7 0.8 0.8 0.8 0.8 0.8 0.9 0.9 0.9 0.9 0.9 0.9 |
1.0 1.0 1.0 1.5 2.0 2.0 2.5 3.0 1.5 1.5 2.0 2.0 2.5 3.0 |
2.5 3.5 4.5 2.0 2.5 4.5 3.0 3.5 2.0 3.5 2.5 3.5 3.0 3.5 |
91.5 88.5 89.4 88.9 103.5 85.7 92.5 87.4 123.4 96.5 112.5 89.3 106.3 104.8 |
시야각의 최대값이 가
가  일 때, 3소자 어레이를 사용하는 인터페로미터 방향탐지기의 경우, 위상차간 거리(R)이 40[degree] 이고 본 발명에 따라 이격비를 산출하였을 때 이를 만족하는 안테나의 거리는 표 1의 좌측에 나타낸 바와 같다.
일 때, 3소자 어레이를 사용하는 인터페로미터 방향탐지기의 경우, 위상차간 거리(R)이 40[degree] 이고 본 발명에 따라 이격비를 산출하였을 때 이를 만족하는 안테나의 거리는 표 1의 좌측에 나타낸 바와 같다.
이는 3소자 배열 안테나의 경우 안테나 소자간의 이격비는 다음과 같음을 말한다. 즉, 제1 안테나 소자와 제2 안테나 소자간의 이격되는 거리(d1)가 안테나를 통해 방사하는 중심 주파수에 해당하는 파장의 0.5배이고, 제2 안테나 소자와 제3 안테나 소자간의 이격되는 거리(d2)가 안테나를 통해 방사하는 중심 주파수에 해당하는 파장의 2.9배이면 위상차가 거리가 48.9[degree]이므로 만족하는 안테나 소자간의 이격비가 된다.
또한, 4소자 어레이를 사용하는 인터페로미터 방향탐지기의 경우, 위상차간 거리(R)이 80[degree] 이고 본 발명에 따라 이격비를 산출하였을 때 이를 만족하는 안테나 소자간의 거리는 표 1의 우측에 나타낸 바와 같다.
여기서 d1, d2 및 d3는 각각 제1 안테나 소자와 제2 안테나 소자간의 거리, 제2 안테나 소자와 제3 안테나 소자간의 거리, 제3 안테나 소자와 제1 안테나 소자간의 거리에 해당한다.
상기와 같이 설명된 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법은 상기 설명된 실시예들의 구성과 방법이 한정되게 적용될 수 있는 것이 아니라, 상기 실시예들은 다양한 변형이 이루어질 수 있도록 각 실시예들의 전부 또는 일부가 선택적으로 조합되어 구성될 수도 있다.
<도면의 주요 부분에 대한 부호의 설명>
10, 20: RF 소자 30: 위상비교기
Claims (11)
- 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법에 있어서,
배열안테나로 수신되는 신호들에 대하여 순시최대시야각(IFOV)의 방위각 및 위상차간 거리를 설정하고, 방향 탐지 장치의 위상비교기에서 출력되는 신호들의 위상차에 대해 위상차 벡터들을 구하는 단계;
상기 위상차 벡터들에 대해 모듈러 연산을 수행한 뒤, 이를 이용하여 위상차 행렬을 구하는 단계;
상기 위상차 행렬을 선형변환하기 위한 변환행렬을 구하고, 변환행렬을 이용하여 선형변환하는 단계;
선형변환으로 생성된 새 축에서 각 위상차 간의 거리를 구하는 단계; 및
각 위상차간 거리가 원하는 위상차간 거리보다 큰 값을 만족하는 안테나 간격을 배열 안테나의 배열 간격으로 산출하는 단계를 포함하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법. - 제1항에 있어서,
상기 배열안테나가 3소자 선형배열인 경우는 상기 위상 비교기로부터 출력되는 2개의 위상차를 사용하고, 4소자 선형배열인 경우는 3개의 위상차를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법. - 제2항에 있어서,
상기 위상차벡터는 수학식을 사용하여 을 구하며, 상기 위상차벡터는
을 구하며, 상기 위상차벡터는 의 배수로 이루어지는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
의 배수로 이루어지는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제3항에 있어서,
상기 순시최대시야각(IFOV)의 방위각을내에서 설정하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제1항에 있어서,
상기 모듈러 연산은 3소자 배열 및 4소자 배열에서 순시최대시야각이영역에서는 를 수행하고, 순시최대시야각이
를 수행하고, 순시최대시야각이 영역에서는
영역에서는 을 수행하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
을 수행하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 1항에 있어서,
상기 선형변환은 3소자 배열에서는 수학식를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 6항에 있어서,
상기 변환행렬은이며, 여기서 α는 를 만족하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
를 만족하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 1항에 있어서,
상기 선형변환은 4소자 배열에서는를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 8항에 있어서,
상기 변환행렬은, , 이며, 여기서, α와 β는
이며, 여기서, α와 β는 ,
, 을 만족하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
을 만족하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 1항에 있어서,
위상차간 거리는, ,
, 를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
- 제 1항에 있어서,
각 위상차간 거리가 원하는 위상차간 거리(R)보다 큰 값을 만족하기 위해 수학식를 사용하는 것을 특징으로 하는 인터페로미터 배열 안테나의 안테나간 배열간격 산출방법.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120114951A KR101357690B1 (ko) | 2012-10-16 | 2012-10-16 | 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 |
| US13/936,288 US9310458B2 (en) | 2012-10-16 | 2013-07-08 | Method for calculating spacing ratio of interferometer array antenna for direction finder |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120114951A KR101357690B1 (ko) | 2012-10-16 | 2012-10-16 | 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR101357690B1 true KR101357690B1 (ko) | 2014-02-04 |
Family
ID=50269666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120114951A KR101357690B1 (ko) | 2012-10-16 | 2012-10-16 | 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US9310458B2 (ko) |
| KR (1) | KR101357690B1 (ko) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101616377B1 (ko) | 2014-04-24 | 2016-05-11 | 국방과학연구소 | 방향탐지 정확도가 향상된 e.s.m. 위상 인터페로미터 방향탐지 시스템 |
| KR101638481B1 (ko) | 2015-01-09 | 2016-07-11 | 국방과학연구소 | 기움각을 갖는 배열 안테나의 간섭계 보정 방법 및 장치 |
| KR20180083174A (ko) * | 2017-01-12 | 2018-07-20 | 국방과학연구소 | 전자전 지원 시스템(Warfare Support System)의 신호도래방위각 측정 장치 및 그 방법 |
| KR20180113267A (ko) * | 2017-04-06 | 2018-10-16 | 서울대학교산학협력단 | 균일 선형 배열 안테나 기반의 가상 수신신호 생성을 이용한 도래각 추정 방법 및 장치 |
| KR101952370B1 (ko) | 2018-04-16 | 2019-02-26 | 국방과학연구소 | 안테나 어레이의 배열 간격을 결정하는 방법 및 장치, 컴퓨터 판독 가능 기록 매체 |
| KR20190043023A (ko) * | 2017-10-17 | 2019-04-25 | 국방과학연구소 | 방탐 모호성 발생 확률 산출 방법 |
| CN109959892A (zh) * | 2019-04-11 | 2019-07-02 | 中国电子科技集团公司第三十六研究所 | 一种均匀圆阵双通道干涉仪测向方法、装置和系统 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104330767A (zh) * | 2014-11-27 | 2015-02-04 | 中国船舶重工集团公司第七二四研究所 | 基于相位模糊数搜索与最小二乘拟合的干涉仪测向方法 |
| KR101603142B1 (ko) * | 2015-04-23 | 2016-03-14 | 국방과학연구소 | 위상인터페로미터 방향 탐지시스템의 다중소자 배열간격 산출 방법 |
| RU2634299C1 (ru) * | 2016-12-08 | 2017-10-26 | Федеральное государственное бюджетное образовательное учреждение высшего образования "Московский технологический университет" | Фазовый радиопеленгатор |
| EP3809526A1 (en) | 2019-10-18 | 2021-04-21 | Rohde & Schwarz GmbH & Co. KG | Antenna system and antenna controlling method |
| CN113945884A (zh) * | 2020-12-09 | 2022-01-18 | 南京长峰航天电子科技有限公司 | 一种融合dbf测向与干涉仪测向的数字阵列方法及系统 |
| CN113050029B (zh) * | 2021-03-26 | 2022-12-02 | 西安电子科技大学 | 一种适用于阵元失效条件下的相位干涉仪测向方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101032299B1 (ko) | 2011-01-03 | 2011-05-06 | 삼성탈레스 주식회사 | 멀티베이스라인 인터페로미터 시스템에서의 자체 교정 방향 탐지 방법 |
| KR20110049113A (ko) * | 2009-11-04 | 2011-05-12 | 인하대학교 산학협력단 | 배열 안테나 시스템의 평균 내부순환 안테나 교정 방법 |
| KR20110094857A (ko) * | 2010-02-18 | 2011-08-24 | 삼성전자주식회사 | 도달각을 추정하는 방법 및 그 장치 |
| KR20110113926A (ko) * | 2010-04-12 | 2011-10-19 | 한국과학기술원 | 연속형 광역 고해상도 영상 구현을 위한 합성 개구면 레이더 시스템 및 그 방법 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6489923B1 (en) * | 1999-09-16 | 2002-12-03 | Nortel Networks Limited | Position location method and apparatus for a mobile telecommunications system |
| US20060082501A1 (en) * | 2004-10-15 | 2006-04-20 | Interdigital Technology Corporation | Method and apparatus for direction finding using phase comparison |
| US7213442B2 (en) * | 2004-10-18 | 2007-05-08 | The Boeing Company | Methods of arranging transducers and transducer arrays having reduced phase ambiguity for determining direction of arrival of received signals |
-
2012
- 2012-10-16 KR KR1020120114951A patent/KR101357690B1/ko active IP Right Grant
-
2013
- 2013-07-08 US US13/936,288 patent/US9310458B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20110049113A (ko) * | 2009-11-04 | 2011-05-12 | 인하대학교 산학협력단 | 배열 안테나 시스템의 평균 내부순환 안테나 교정 방법 |
| KR20110094857A (ko) * | 2010-02-18 | 2011-08-24 | 삼성전자주식회사 | 도달각을 추정하는 방법 및 그 장치 |
| KR20110113926A (ko) * | 2010-04-12 | 2011-10-19 | 한국과학기술원 | 연속형 광역 고해상도 영상 구현을 위한 합성 개구면 레이더 시스템 및 그 방법 |
| KR101032299B1 (ko) | 2011-01-03 | 2011-05-06 | 삼성탈레스 주식회사 | 멀티베이스라인 인터페로미터 시스템에서의 자체 교정 방향 탐지 방법 |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101616377B1 (ko) | 2014-04-24 | 2016-05-11 | 국방과학연구소 | 방향탐지 정확도가 향상된 e.s.m. 위상 인터페로미터 방향탐지 시스템 |
| KR101638481B1 (ko) | 2015-01-09 | 2016-07-11 | 국방과학연구소 | 기움각을 갖는 배열 안테나의 간섭계 보정 방법 및 장치 |
| KR20180083174A (ko) * | 2017-01-12 | 2018-07-20 | 국방과학연구소 | 전자전 지원 시스템(Warfare Support System)의 신호도래방위각 측정 장치 및 그 방법 |
| KR101957291B1 (ko) * | 2017-01-12 | 2019-03-12 | 국방과학연구소 | 전자전 지원 시스템(Warfare Support System)의 신호도래방위각 측정 장치 및 그 방법 |
| KR20180113267A (ko) * | 2017-04-06 | 2018-10-16 | 서울대학교산학협력단 | 균일 선형 배열 안테나 기반의 가상 수신신호 생성을 이용한 도래각 추정 방법 및 장치 |
| KR101953697B1 (ko) * | 2017-04-06 | 2019-03-04 | 서울대학교산학협력단 | 균일 선형 배열 안테나 기반의 가상 수신신호 생성을 이용한 도래각 추정 방법 및 장치 |
| KR20190043023A (ko) * | 2017-10-17 | 2019-04-25 | 국방과학연구소 | 방탐 모호성 발생 확률 산출 방법 |
| KR102022589B1 (ko) * | 2017-10-17 | 2019-09-18 | 국방과학연구소 | 방탐 모호성 발생 확률 산출 방법 |
| KR101952370B1 (ko) | 2018-04-16 | 2019-02-26 | 국방과학연구소 | 안테나 어레이의 배열 간격을 결정하는 방법 및 장치, 컴퓨터 판독 가능 기록 매체 |
| CN109959892A (zh) * | 2019-04-11 | 2019-07-02 | 中国电子科技集团公司第三十六研究所 | 一种均匀圆阵双通道干涉仪测向方法、装置和系统 |
| CN109959892B (zh) * | 2019-04-11 | 2023-03-10 | 中国电子科技集团公司第三十六研究所 | 一种均匀圆阵双通道干涉仪测向方法、装置和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20140104111A1 (en) | 2014-04-17 |
| US9310458B2 (en) | 2016-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101357690B1 (ko) | 방향탐지용 인터페로미터 배열 안테나 이격비 산출방법 | |
| US5657027A (en) | Two dimensional interferometer array | |
| EP1872149B1 (en) | Positioning system with a sparse antenna array | |
| US10416268B2 (en) | Multipolarized vector sensor array antenna system for search and rescue applications | |
| US9645222B2 (en) | Apparatus for direction finding of wireless signals | |
| US8068065B1 (en) | Concentric ring log-periodic slot direction finding antenna | |
| Van Doan et al. | Optimized algorithm for solving phase interferometer ambiguity | |
| US20140002306A1 (en) | Directional radio signal detection apparatus and methods of use | |
| CN110187303B (zh) | 一种单脉冲比幅比相联合测向方法 | |
| KR101984105B1 (ko) | 위상비교 방식을 이용한 2차원 방향탐지 오차 추정 시스템 및 그 방법 | |
| EP2843437B1 (en) | Direction of arrival determination for a radio signal | |
| CN111613881A (zh) | 测向接收装置及测向系统 | |
| RU2598648C1 (ru) | Способ радиопеленгования и радиопеленгатор для его осуществления | |
| RU2615491C1 (ru) | Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | |
| Van Doan et al. | Algorithm for obtaining high accurate phase interferometer | |
| KR101201901B1 (ko) | 레이더 시스템 및 그 보정 방법 | |
| RU2303274C1 (ru) | Способ радиопеленгования и радиопеленгатор для его осуществления | |
| US20180038934A1 (en) | Discrimination of signal angle of arrival using at least two antennas | |
| WO2007039774A1 (en) | Array calibration with signals of opportunity | |
| KR101032299B1 (ko) | 멀티베이스라인 인터페로미터 시스템에서의 자체 교정 방향 탐지 방법 | |
| KR101610051B1 (ko) | 방위 오차 보정 방법 및 장치 | |
| Searle | An examination of bias in SODA interferometry | |
| Mollai et al. | Wideband two dimensional interferometric direction finding algorithm using base-triangles and a proposed minimum planar array | |
| CN113556674A (zh) | 基于蓝牙通信的室内定位方法、系统和ble芯片 | |
| US10001542B1 (en) | Method for establishing direction of arrival by use of signals of opportunity |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant | ||
| FPAY | Annual fee payment |
Payment date: 20170102 Year of fee payment: 4 |
|
| FPAY | Annual fee payment |
Payment date: 20190102 Year of fee payment: 6 |
|
| FPAY | Annual fee payment |
Payment date: 20200103 Year of fee payment: 7 |