JP7686880B2 - 自動車レーダシステムを使用して物体目標の少なくとも1つの仰角変数を決定するための方法 - Google Patents
自動車レーダシステムを使用して物体目標の少なくとも1つの仰角変数を決定するための方法 Download PDFInfo
- Publication number
- JP7686880B2 JP7686880B2 JP2024516965A JP2024516965A JP7686880B2 JP 7686880 B2 JP7686880 B2 JP 7686880B2 JP 2024516965 A JP2024516965 A JP 2024516965A JP 2024516965 A JP2024516965 A JP 2024516965A JP 7686880 B2 JP7686880 B2 JP 7686880B2
- Authority
- JP
- Japan
- Prior art keywords
- variable
- radar system
- object target
- directional
- relative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/003—Bistatic radar systems; Multistatic radar systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/42—Simultaneous measurement of distance and other co-ordinates
- G01S13/44—Monopulse radar, i.e. simultaneous lobing
- G01S13/4454—Monopulse radar, i.e. simultaneous lobing phase comparisons monopulse, i.e. comparing the echo signals received by an interferometric antenna arrangement
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/46—Indirect determination of position data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/589—Velocity or trajectory determination systems; Sense-of-movement determination systems measuring the velocity vector
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo, light or radio wave sensitive means, e.g. infrared sensors
- B60W2420/408—Radar; Laser, e.g. lidar
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S2013/0236—Special technical features
- G01S2013/0245—Radar with phased array antenna
- G01S2013/0263—Passive array antenna
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9327—Sensor installation details
- G01S2013/93271—Sensor installation details in the front of the vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Radar Systems Or Details Thereof (AREA)
Description
レーダシステムを使用して、レーダ信号を放射し、物体目標で反射されたレーダ信号からのエコー信号を受信し、
レーダシステムの移動速度を決定し、
レーダシステムに対する少なくとも1つの物体目標の半径方向速度は、受信されたエコー信号によってレーダシステムを使用して決定され、
レーダシステムに対して固定された第1の基準領域に対する物体目標の方向を特徴付ける第1の方向変数が、受信されたエコー信号によってレーダシステムを使用して決定され、
レーダシステムに対して固定された第2の基準領域に対する物体目標の方向を特徴付ける第2の方向変数が、第1の方向変数、半径方向速度、及び移動速度によって決定され、
物体目標の少なくとも1つの仰角変数は、方向変数のうちの少なくとも1つによって決定される。
レーダ信号を放射するための少なくとも1つのアンテナと、
物体目標で反射されたレーダ信号のエコー信号を受信するための少なくとも1つのアンテナと、
仰角基準面に対して、レーダシステムを使用して検出された物体の物体目標から少なくとも1つの仰角変数を決定するための手段であって、
手段は、受信されたエコー信号によってレーダシステムに対する検出された物体目標の半径方向速度を決定するための手段と、
受信されたエコー信号によって、レーダシステムに対して固定された第1の基準領域に対する物体目標の方向を特徴付ける第1の方向変数を決定する手段と、
レーダシステムに対して固定された第2の基準領域に対する物体目標の方向を特徴付ける第2の方向変数を、レーダシステムの第1の方向変数、半径方向速度、及び移動速度によって決定する手段と、
方向変数のうちの少なくとも1つによって物体目標の少なくとも1つの仰角変数を決定する手段と、有する手段と、を備える。
少なくとも1つのレーダシステムは、
レーダ信号を放射するための少なくとも1つのアンテナと、
物体目標で反射されたレーダ信号のエコー信号を受信するための少なくとも1つのアンテナと、
仰角基準面に対して、レーダシステムを使用して検出された物体の物体目標から少なくとも1つの仰角変数を決定するための手段であって、
手段は、受信されたエコー信号によってレーダシステムに対する検出された物体目標の半径方向速度を決定するための手段と、
受信されたエコー信号によって、レーダシステムに対して固定された第1の基準領域に対する物体目標の方向を特徴付ける第1の方向変数を決定する手段と、
レーダシステムに対して固定された第2の基準領域に対する物体目標の方向を特徴付ける第2の方向変数を、レーダシステムの第1の方向変数、半径方向速度、及び移動速度によって決定する手段と、
方向変数のうちの少なくとも1つによって物体目標の少なくとも1つの仰角変数を決定する手段と、有する手段と、を備える。
レーダ信号は、レーダシステムの少なくとも1つのアンテナを使用して放射され、エコー信号は、レーダシステムの少なくとも2つのアンテナを使用して受信され、アンテナのそれぞれの位相中心は、仰角基準面に平行に延在する仮想アンテナ軸に沿って配置され、
第1の方向変数は、基準領域としてレーダシステムに対して固定された第1の基準軸に対して決定され、第2の方向変数は、基準領域としてレーダシステムに対して固定された第2の基準軸に対して決定される。
差を少なくとも1つの制限値と比較することができ、比較の結果に応じて、物体目標が静止しており、少なくとも1つの仰角変数を決定するための方法を継続することができると仮定することができ、そうでなければ、この物体目標について方法を終了することができ、
及び/又は
差を2つの指定された制限値と比較することができ、差が2つの制限値の間にある場合、物体目標は静止していると仮定することができ、少なくとも1つの仰角変数を決定するための方法を継続することができ、そうでなければ、この物体目標について方法を終了することができる。このようにして、空間内の物体目標の速度は、数学的に、特に三角法によって、移動速度、半径方向速度、及び第1の方向変数を考慮して決定することができる。
レーダシステムは、使用してレーダ信号を放射することができる少なくとも1つのアンテナと、使用して物体目標で反射されたレーダ信号からエコー信号を受信することができる少なくとも2つのアンテナであって、アンテナのそれぞれの位相中心は、仰角基準面に平行に延在する仮想アンテナ軸に沿って配置される、アンテナと、
レーダシステムに対して第1の方向変数のための基準領域として固定された第1の基準軸と、第2の方向変数のための基準領域として固定された第2基準軸と、を有するということで目標が達成される。
少なくとも1つのレーダシステムは、使用してレーダ信号を放射することができる少なくとも1つのアンテナと、使用して物体目標で反射されたレーダ信号からエコー信号を受信することができる少なくとも2つのアンテナであって、アンテナのそれぞれの位相中心は、仰角基準面に平行に延在する仮想アンテナ軸に沿って配置される、アンテナと、
少なくとも1つのレーダシステムに対して第1の方向変数のための基準領域として固定された第1の基準軸と、第2の方向変数のための基準領域として固定された第2基準軸と、を有するということで目標が達成される。
Claims (11)
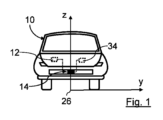
- 仰角基準面(31)に対してのレーダシステム(14)によって検出される、物体(18)の物体目標(22)の少なくとも1つの仰角変数(Θ、h)を決定するための方法であって、
前記レーダシステム(14)を使用して、レーダ信号(20)が放射され、前記物体目標(22)で反射されたレーダ信号(20)のエコー信号(24)が受信され、
前記レーダシステム(14)の移動速度(VH)が決定され、
前記レーダシステム(14)に対する前記少なくとも1つの物体目標(22)の半径方向速度(VR)が、前記受信されたエコー信号(24)によって前記レーダシステム(14)を使用して決定され、
前記レーダシステム(14)に対して固定された第1の基準領域(y)に対する前記物体目標(22)の方向を特徴付ける第1の方向変数(α)が、前記受信されたエコー信号(24)によって前記レーダシステム(14)を使用して決定され、
前記レーダシステム(14)に対して固定された第2の基準領域(x)に対する前記物体目標(22)の方向を特徴付ける第2の方向変数(β)が、前記第1の方向変数(α)、前記半径方向速度(VR)、および前記移動速度(VH)によって決定され、
前記物体目標(22)の少なくとも1つの仰角変数(Θ、a)が、前記方向変数(α、β)の少なくとも1つによって決定され、
前記レーダシステム(14)の少なくとも1つのアンテナ(Tx)を使用してレーダ信号(20)が放射され、前記レーダシステム(14)の少なくとも2つのアンテナ(Rx)を使用してエコー信号(24)が受信され、前記アンテナ(Tx、Rx)のそれぞれの位相中心(28)が、前記仰角基準面(31)に平行に延在する仮想アンテナ軸(30)に沿って配置され、
前記第1の方向変数(α)が、前記基準領域として前記レーダシステム(14)に対して固定された第1の基準軸(y)に対して決定され、前記第2の方向変数(β)が、前記基準領域として前記レーダシステム(14)に対して固定された第2の基準軸(x)に対して決定されることを特徴とする、方法。 - 前記第1の方向変数(α)が、異なるアンテナ(Rx)を使用して受信された同じレーダ信号(20)のエコー信号(24)間の位相シフトから決定されることを特徴とする、請求項1に記載の方法。
- 前記第2の方向変数(β)が、前記第1の方向変数(α)、前記半径方向速度(VR)、および前記移動速度(VH)を使用して数学的関係から計算され、特に、第2の方向角度の形態の第2の方向変数(β)が、
β = arcsin(V R / (V H × cos α))
として計算されることを特徴とする、請求項1に記載の方法。 - 前記第2の方向変数(β)が、第1の方向変数(α)、第2の方向変数(β)、半径方向速度(VR)、および移動速度(VH)の関連付けを含む変換テーブル(36)から取得され、第2の方向変数(β)が、第1の方向変数(α)および半径方向速度(VR)の関数として第2の方向変数(β)を含む、前記それぞれの移動速度(VH)に対応する変換テーブル(36)から取得されることを特徴とする、請求項1に記載の方法。
- 前記第1の方向変数(α)および前記第2の方向変数(β)が角度の形態で実装されることを特徴とする、請求項1に記載の方法。
- 前記2つの基準軸(x、y)が、前記仰角基準面(31)に平行に、または前記仰角基準面(31)内に延在する平面に及ぶように指定されることを特徴とする、請求項1に記載の方法。
- 前記第2の方向変数(β)の前記決定の前に、前記検出された物体目標(22)が静止しているかどうかがチェックされ、前記物体目標(22)が静止していない場合、少なくとも1つの仰角変数(Θ、h)を決定するための前記方法がこの物体目標(22)に対して終了し、そうでない場合、少なくとも1つの仰角変数(Θ、h)を決定するための前記方法が継続されることを特徴とする、請求項1に記載の方法。
- 前記物体目標(22)が静止しているかどうかをチェックするために、前記半径方向速度(VR)と、前記移動速度(VH)と前記第1の方向変数(α)の余弦との積との間の差が計算され、
前記差が少なくとも一つの制限値(TH1、TH2)と比較され、前記比較の結果に応じて、前記物体目標(22)が静止していると仮定され、前記少なくとも一つの仰角変数(Θ、h)を決定するための前記方法が継続され、そうでなければ、この物体目標(22)に対する前記方法が終了され、
および/または
前記差が2つの指定された制限値(TH1、TH2)と比較され、前記差が前記2つの制限値(TH1、TH2)の間にある場合、前記物体目標(22)が静止していると仮定され、前記少なくとも1つの仰角変数(Θ、h)を決定するための前記方法が継続され、そうでない場合、前記方法はこの物体目標(22)対して終了することを特徴とする、請求項7に記載の方法。 - 前記少なくとも1つの仰角変数(Θ、a)および/または前記物体目標(22)の方位角(Φ)が、前記第1の方向変数(α)および前記第2の方向変数(β)によって計算され、および/または少なくとも1つの変換テーブルから取得されることを特徴とする、請求項1に記載の方法。
- レーダシステム(14)であって、
レーダ信号(20)を放射するための少なくとも一つのアンテナ(Tx)と、
物体目標(22)で反射されたレーダ信号(20)からのエコー信号(24)を受信するための少なくとも1つのアンテナ(Rx)と、
前記レーダシステム(14)を使用して検出された物体(18)の物体目標(22)の少なくとも一つの仰角変数(Θ、h)を、仰角基準面(31)に対して決定する手段であって、前記手段が、
受信されたエコー信号(24)によって前記レーダシステム(14)に対する検出された物体目標(22)の半径方向速度(VR)を決定する手段と、
受信されたエコー信号(24)によって、前記レーダシステム(14)に対して固定された第1の基準領域(y)に対する物体目標(22)の方向を特徴付ける第1の方向変数(α)を決定する手段と、
前記レーダシステム(14)に対して固定された第2の基準領域(x)に対する物体目標(22)の方向を特徴付ける第2の方向変数(β)を、前記レーダシステム(14)の第1の方向変数(α)、半径方向速度(VR)、および移動速度(VH)によって決定する手段と、
前記方向変数(α、β)のうちの少なくとも1つによって物体目標(22)の少なくとも1つの仰角変数(Θ、h)を決定する手段と、を有する、手段と、を備え、
前記レーダシステム(14)が、
使用してレーダ信号(20)を放射することができる少なくとも1つのアンテナ(Tx)と、使用して物体目標(22)で反射されたレーダ信号(20)からのエコー信号(24)を受信することができる少なくとも2つのアンテナ(Rx)であって、前記アンテナ(Tx、Rx)のそれぞれの位相中心(28)が、前記仰角基準面(31)に平行に延在する仮想アンテナ軸(30)に沿って配置される、アンテナ(Tx、Rx)と、
前記第1の方向変数(α)の前記基準領域として前記レーダシステム(14)に対して固定された第1の基準軸(y)と、前記第2の方向変数(β)の前記基準領域として固定された第2の基準軸(x)と、を有することを特徴とする、レーダシステム(14)。 - 少なくとも1つのレーダシステム(14)を有する車両(10)であって、前記少なくとも1つのレーダシステム(14)が、
レーダ信号(20)を放射するための少なくとも一つのアンテナ(Tx)と、
物体目標(22)で反射されたレーダ信号(20)からのエコー信号(24)を受信するための少なくとも1つのアンテナ(Rx)と、
前記レーダシステム(14)を使用して検出された物体(18)の物体目標(22)の少なくとも一つの仰角変数(Θ、h)を、仰角基準面(31)に対して決定する手段であって、前記手段が、
受信されたエコー信号(24)によって前記レーダシステム(14)に対する検出された物体目標(22)の半径方向速度(VR)を決定する手段と、
受信されたエコー信号(24)によって、前記レーダシステム(14)に対して固定された第1の基準領域(y)に対する物体目標(22)の方向を特徴付ける第1の方向変数(α)を決定する手段と、
前記レーダシステム(14)に対して固定された第2の基準領域(x)に対する物体目標(22)の方向を特徴付ける第2の方向変数(β)を、前記レーダシステム(14)の第1の方向変数(α)、半径方向速度(VR)、および移動速度(VH)によって決定する手段と、
前記方向変数(α、β)のうちの少なくとも1つによって物体目標(22)の少なくとも1つの仰角変数(Θ、h)を決定する手段と、を有する、手段と、を備え、
前記少なくとも1つのレーダシステム(14)が、
使用してレーダ信号(20)を放射することができる少なくとも1つのアンテナ(Tx)と、使用して物体目標(22)で反射されたレーダ信号(20)からのエコー信号(24)を受信することができる少なくとも2つのアンテナ(Rx)であって、前記アンテナ(Tx、Rx)のそれぞれの位相中心(28)が、前記仰角基準面(31)に平行に延在する仮想アンテナ軸(30)に沿って配置される、アンテナ(Tx、Rx)と、
前記第1の方向変数(α)の前記基準領域として前記少なくとも1つのレーダシステム(14)に対して固定された第1の基準軸(y)と、前記第2の方向変数(β)の前記基準領域として固定された第2の基準軸(x)と、を有することを特徴とする、車両(10)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102021123942.7A DE102021123942A1 (de) | 2021-09-16 | 2021-09-16 | Verfahren zur Bestimmung wenigstens eine Elevationsgröße eines Objektziels eines Objekts, Radarsystem und Fahrzeug mit wenigstens einem Radarsystem |
| DE102021123942.7 | 2021-09-16 | ||
| PCT/EP2022/075341 WO2023041499A1 (de) | 2021-09-16 | 2022-09-13 | Verfahren zur bestimmung wenigstens einer elevationsgrösse eines objektziels mit einem kfz- radarsystem |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024533580A JP2024533580A (ja) | 2024-09-12 |
| JP7686880B2 true JP7686880B2 (ja) | 2025-06-02 |
Family
ID=83558280
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024516965A Active JP7686880B2 (ja) | 2021-09-16 | 2022-09-13 | 自動車レーダシステムを使用して物体目標の少なくとも1つの仰角変数を決定するための方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20240377530A1 (ja) |
| EP (1) | EP4402512A1 (ja) |
| JP (1) | JP7686880B2 (ja) |
| KR (1) | KR20240058175A (ja) |
| CN (1) | CN117980777A (ja) |
| DE (1) | DE102021123942A1 (ja) |
| WO (1) | WO2023041499A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007111130A1 (ja) | 2006-03-27 | 2007-10-04 | Murata Manufacturing Co., Ltd. | レーダ装置および移動体 |
| US20160103213A1 (en) | 2014-10-08 | 2016-04-14 | Texas Instruments Incorporated | Three Dimensional (3D) Tracking of Objects in a Radar System |
| DE102018000517A1 (de) | 2018-01-23 | 2018-08-23 | Daimler Ag | Verfahren zur radarbasierten Vermessung und/oder Klassifizierung von Objekten in einer Fahrzeugumgebung |
| JP2019518946A (ja) | 2016-05-12 | 2019-07-04 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | 自動車両用レーダーセンサ装置、ドライバー支援システム、自動車両、及び物体を感知するための方法 |
| US20200191936A1 (en) | 2017-06-09 | 2020-06-18 | Veoneer Sweden Ab | Enhanced vertical object detection for a vehicle radar system |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102008038365A1 (de) * | 2008-07-02 | 2010-01-07 | Adc Automotive Distance Control Systems Gmbh | Fahrzeug-Radarsystem und Verfahren zur Bestimmung einer Position zumindest eines Objekts relativ zu einem Fahrzeug |
| US8125373B2 (en) * | 2010-07-23 | 2012-02-28 | Toyota Motor Engineering & Manufacturing North America, Inc. | Microwave system utilizing elevational scanning by frequency hopping |
| DE102012220773A1 (de) * | 2012-11-14 | 2014-05-15 | Robert Bosch Gmbh | Vorrichtung und Verfahren zur Elevationswinkelbestimmung in einem Radarsystem |
| DE102015009382A1 (de) * | 2015-07-24 | 2016-01-21 | Daimler Ag | Verfahren zur radarbasierten Bestimmung einer Höhe eines Objekts |
| DE102015012246A1 (de) * | 2015-09-18 | 2016-03-03 | Daimler Ag | Verfahren zur Bestimmung einer Einbauorientierung eines Radarsensors |
| EP3293545A1 (en) * | 2016-09-09 | 2018-03-14 | Autoliv Development AB | Determining relative velocity in a vehicle radar system |
| DE102018218003A1 (de) * | 2018-10-22 | 2020-04-23 | Zf Friedrichshafen Ag | Verfahren, Computerprogramm und Messsystem für die Auswertung von Bewegungsinformationen |
| US11175382B2 (en) * | 2019-06-14 | 2021-11-16 | GM Global Technology Operations LLC | Elevation angle estimation in horizontal antenna array with doppler and velocity measurements |
| DE102020119934A1 (de) * | 2020-07-29 | 2022-02-03 | Valeo Schalter Und Sensoren Gmbh | Verfahren zum Betreiben eines Radarsystems, Radarsystem und Fahrzeug mit wenigstens einem Radarsystem |
-
2021
- 2021-09-16 DE DE102021123942.7A patent/DE102021123942A1/de active Pending
-
2022
- 2022-09-13 KR KR1020247012529A patent/KR20240058175A/ko active Pending
- 2022-09-13 JP JP2024516965A patent/JP7686880B2/ja active Active
- 2022-09-13 US US18/691,403 patent/US20240377530A1/en active Pending
- 2022-09-13 EP EP22783479.3A patent/EP4402512A1/de active Pending
- 2022-09-13 WO PCT/EP2022/075341 patent/WO2023041499A1/de not_active Ceased
- 2022-09-13 CN CN202280062407.XA patent/CN117980777A/zh active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007111130A1 (ja) | 2006-03-27 | 2007-10-04 | Murata Manufacturing Co., Ltd. | レーダ装置および移動体 |
| US20160103213A1 (en) | 2014-10-08 | 2016-04-14 | Texas Instruments Incorporated | Three Dimensional (3D) Tracking of Objects in a Radar System |
| JP2019518946A (ja) | 2016-05-12 | 2019-07-04 | ヴァレオ・シャルター・ウント・ゼンゾーレン・ゲーエムベーハー | 自動車両用レーダーセンサ装置、ドライバー支援システム、自動車両、及び物体を感知するための方法 |
| US20200191936A1 (en) | 2017-06-09 | 2020-06-18 | Veoneer Sweden Ab | Enhanced vertical object detection for a vehicle radar system |
| DE102018000517A1 (de) | 2018-01-23 | 2018-08-23 | Daimler Ag | Verfahren zur radarbasierten Vermessung und/oder Klassifizierung von Objekten in einer Fahrzeugumgebung |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4402512A1 (de) | 2024-07-24 |
| KR20240058175A (ko) | 2024-05-03 |
| JP2024533580A (ja) | 2024-09-12 |
| US20240377530A1 (en) | 2024-11-14 |
| CN117980777A (zh) | 2024-05-03 |
| DE102021123942A1 (de) | 2023-03-16 |
| WO2023041499A1 (de) | 2023-03-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7008826B2 (ja) | 自律車両の3d環境イメージングを可能にする高度の位相角測定のための垂直オフセットを有するアンテナアレイを備えた自動車用レーダ | |
| US20230204713A1 (en) | Radar System with Modified Orthogonal Linear Antenna Subarrays | |
| US12386064B2 (en) | Methods and systems for detecting and mitigating automotive radar interference | |
| KR20200040147A (ko) | 레이더 장착 각도 검출 장치 및 그 방법 | |
| JP2026507484A (ja) | 検出された対象の位置情報を機械学習を用いて決定するレーダーシステムを動作させる方法、レーダーシステム、ドライバー支援システム、および車両 | |
| CN105103004B (zh) | 用于在雷达系统中确定仰角的设备和方法 | |
| US20250102658A1 (en) | Radar system for a vehicle, vehicle, and method for operating a radar system | |
| US20240319333A1 (en) | Method for assigning information channels of at least two sensors, each mounted in defined mounting positions relative to one another, to a detection device | |
| JP7686880B2 (ja) | 自動車レーダシステムを使用して物体目標の少なくとも1つの仰角変数を決定するための方法 | |
| CN116348787A (zh) | 操作雷达系统的方法、雷达系统和包括至少一个雷达系统的车辆 | |
| US20230341545A1 (en) | Near field radar beamforming | |
| US12172607B2 (en) | Atmospheric property estimation system and method in dynamic environments using LIDAR | |
| JP7767528B2 (ja) | レーダシステム、レーダシステムのためのアンテナアレイ、少なくとも1つのレーダシステムを備える車両、及び少なくとも1つのレーダシステムを操作するための方法 | |
| US11719810B2 (en) | Automotive synthetic aperture radar with radon transform | |
| CN118393425A (zh) | 在多路径场景中联合检测到达方向角度和离去方向角度的雷达系统 | |
| KR20230043990A (ko) | 레이더 시스템, 레이더 시스템을 위한 안테나 어레이, 차량 및 레이더 시스템의 작동 방법 | |
| KR20260003755A (ko) | 센서 데이터 처리를 위한 방법, 출력 데이터 처리를 위한 방법 및 신호 처리 유닛 | |
| JP2022025661A (ja) | 電子機器、電子機器の制御方法、及びプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240527 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240508 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20250107 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250407 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250422 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250521 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7686880 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |