JP7659740B2 - 移動体、移動体の制御方法、及びプログラム - Google Patents
移動体、移動体の制御方法、及びプログラム Download PDFInfo
- Publication number
- JP7659740B2 JP7659740B2 JP2020213750A JP2020213750A JP7659740B2 JP 7659740 B2 JP7659740 B2 JP 7659740B2 JP 2020213750 A JP2020213750 A JP 2020213750A JP 2020213750 A JP2020213750 A JP 2020213750A JP 7659740 B2 JP7659740 B2 JP 7659740B2
- Authority
- JP
- Japan
- Prior art keywords
- imaging
- unit
- baseline length
- imaging unit
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/245—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures using a plurality of fixed, simultaneously operating transducers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C3/00—Measuring distances in line of sight; Optical rangefinders
- G01C3/02—Details
- G01C3/06—Use of electric means to obtain final indication
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B15/00—Special procedures for taking photographs; Apparatus therefor
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B35/00—Stereoscopic photography
- G03B35/08—Stereoscopic photography by simultaneous recording
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/80—Analysis of captured images to determine intrinsic or extrinsic camera parameters, i.e. camera calibration
- G06T7/85—Stereo camera calibration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/204—Image signal generators using stereoscopic image cameras
- H04N13/239—Image signal generators using stereoscopic image cameras using two 2D image sensors having a relative position equal to or related to the interocular distance
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/20—Image signal generators
- H04N13/296—Synchronisation thereof; Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/695—Control of camera direction for changing a field of view, e.g. pan, tilt or based on tracking of objects
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Electromagnetism (AREA)
- Measurement Of Optical Distance (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Stereoscopic And Panoramic Photography (AREA)
- Studio Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
目標基線長は、上述の実施形態では移動体10(特に移動体制御部31の基線長決定部39)において決定されているが、移動体10とは別体の装置(例えば操作装置70)において決定された目標基線長が、移動体10に送られてもよい。例えば、操作装置70の操作制御部72が、駆動指示情報から取得される状態変数に基づいて目標基線長を導出し、このようにして導出された目標基線長が操作送受信機71及び移動体送受信機30を介して移動体制御部31に送られてもよい。
第1撮像部及び第2撮像部を含むステレオカメラと、
前記第1撮像部と前記第2撮像部との間の基線長を変えるように、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる基線長変更部と、
前記第1撮像部及び前記第2撮像部の可変的な撮像状態の情報を示す状態変数に応じた目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する移動体制御部と、
を備える移動体。
前記状態変数は、前記移動体の移動速度、前記第1撮像部及び前記第2撮像部の撮像方向の傾き、及び前記移動体の高度のうちの少なくとも1以上に関する情報を含む
項目1に記載の移動体。
前記状態変数を測定する撮像状態測定部を備え、
前記移動体制御部は、前記撮像状態測定部から取得される前記状態変数に応じた前記目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する
項目1又は2に記載の移動体。
前記移動体を駆動する移動体駆動部を備え、
前記移動体制御部は、駆動指示情報を受信し、当該駆動指示情報に基づいて前記移動体駆動部を制御し、
前記駆動指示情報は、前記状態変数に関する情報を含み、
前記移動体制御部は、前記駆動指示情報に基づいて取得される前記状態変数に応じた前記目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する
項目1又は2に記載の移動体。
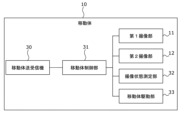
前記移動体制御部は、前記第1撮像部により取得される撮像データ及び前記第2撮像部により取得される撮像データに基づいて、目標対象物までの距離を導出する
項目1~4のいずれかに記載の移動体。
前記移動体制御部は、前記第1撮像部により取得される撮像データ及び前記第2撮像部により取得される撮像データに基づいて、自己位置の推定及び周辺環境の地図の作成を行う
項目1~5のいずれかに記載の移動体。
前記移動体制御部は、前記状態変数に基づいて前記目標基線長を決定する
項目1~6のいずれかに記載の移動体。
前記移動体制御部は、
前記状態変数に基づいて目標撮像範囲を決定し、
前記目標撮像範囲に基づいて前記目標基線長を決定する
項目7に記載の移動体。
前記移動体制御部は、
現在の前記基線長に基づく、前記第1撮像部の撮像範囲及び前記第2撮像部の撮像範囲の両方に含まれるステレオカメラ撮像範囲を取得し、
前記目標撮像範囲及び前記ステレオカメラ撮像範囲の比較に基づいて、前記目標基線長を決定する
項目8に記載の移動体。
前記移動体制御部は、
前記状態変数に基づいて、前記目標撮像範囲の最大距離を示す目標最大距離と、前記目標撮像範囲の最小距離を示す目標最小距離と、を取得し、
現在の前記基線長に基づく前記ステレオカメラ撮像範囲の最大距離を示す撮像最大距離と、前記ステレオカメラ撮像範囲の最小距離を示す撮像最小距離と、を取得し、
前記目標最大距離、前記目標最小距離、前記撮像最大距離、及び前記撮像最小距離に基づいて、前記目標基線長を決定する
項目9に記載の移動体。
車両として設けられる項目1~10のいずれかに記載の移動体。
飛行体として設けられる項目1~10のいずれかに記載の移動体。
移動体が備える第1撮像部及び第2撮像部の可変的な撮像状態についての情報を示す状態変数に応じた目標基線長に、前記第1撮像部と前記第2撮像部との間の基線長が調整されるよう、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる
移動体の制御方法。
コンピュータに、
移動体が備える第1撮像部及び第2撮像部の可変的な撮像状態についての情報を示す状態変数に応じた目標基線長に、前記第1撮像部と前記第2撮像部との間の基線長が調整されるよう、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる手順を実行させるための、
プログラム。
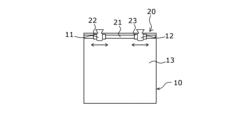
11 第1撮像部
12 第2撮像部
13 移動体本体
20 基線長変更部
21 スライドガイド
22 可動ステージ
23 可動ステージ
30 移動体送受信機
31 移動体制御部
32 撮像状態測定部
33 移動体駆動部
36 デバイス駆動コントローラ
37 基線長データ記憶部
38 センサ情報取得部
39 基線長決定部
40 基線長コントローラ
45 デバイス駆動部
70 操作装置
71 操作送受信機
72 操作制御部
73 操作インターフェース
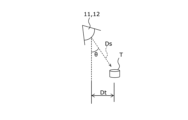
Ds 撮像方向
Lb 基線長
R0 ステレオカメラ撮像範囲
R1 第1撮像範囲
R2 第2撮像範囲
T 目標対象物
Claims (13)
- 第1撮像部及び第2撮像部を含むステレオカメラと、
前記第1撮像部と前記第2撮像部との間の基線長を変えるように、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる基線長変更部と、
前記第1撮像部及び前記第2撮像部の可変的な撮像状態の情報を示す状態変数に応じた目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する移動体制御部と、
を備える移動体であって、
前記状態変数は、前記移動体の移動速度、前記第1撮像部及び前記第2撮像部の撮像方向の傾き、及び前記移動体の高度のうちの少なくとも1以上に関する情報を含む、
移動体。 - 前記状態変数を測定する撮像状態測定部を備え、
前記移動体制御部は、前記撮像状態測定部から取得される前記状態変数に応じた前記目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する
請求項1に記載の移動体。 - 第1撮像部及び第2撮像部を含むステレオカメラと、
前記第1撮像部と前記第2撮像部との間の基線長を変えるように、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる基線長変更部と、
前記第1撮像部及び前記第2撮像部の可変的な撮像状態の情報を示す状態変数に応じた目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する移動体制御部と、
移動体を駆動する移動体駆動部と、を備え、
前記移動体制御部は、駆動指示情報を受信し、当該駆動指示情報に基づいて前記移動体駆動部を制御し、
前記駆動指示情報は、前記状態変数に関する情報を含み、
前記移動体制御部は、前記駆動指示情報に基づいて取得される前記状態変数に応じた前記目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する
移動体。 - 前記移動体制御部は、前記第1撮像部により取得される撮像データ及び前記第2撮像部により取得される撮像データに基づいて、目標対象物までの距離を導出する
請求項1に記載の移動体。 - 第1撮像部及び第2撮像部を含むステレオカメラと、
前記第1撮像部と前記第2撮像部との間の基線長を変えるように、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる基線長変更部と、
前記第1撮像部及び前記第2撮像部の可変的な撮像状態の情報を示す状態変数に応じた目標基線長に、前記基線長が調整されるよう、前記基線長変更部を制御する移動体制御部と、
を備え、
前記移動体制御部は、前記第1撮像部により取得される撮像データ及び前記第2撮像部により取得される撮像データに基づいて、自己位置の推定及び周辺環境の地図の作成を行う
移動体。 - 前記移動体制御部は、前記状態変数に基づいて前記目標基線長を決定する
請求項1に記載の移動体。 - 前記移動体制御部は、
前記状態変数に基づいて目標撮像範囲を決定し、
前記目標撮像範囲に基づいて前記目標基線長を決定する
請求項6に記載の移動体。 - 前記移動体制御部は、
現在の前記基線長に基づく、前記第1撮像部の撮像範囲及び前記第2撮像部の撮像範囲の両方に含まれるステレオカメラ撮像範囲を取得し、
前記目標撮像範囲及び前記ステレオカメラ撮像範囲の比較に基づいて、前記目標基線長を決定する
請求項7に記載の移動体。 - 前記移動体制御部は、
前記状態変数に基づいて、前記目標撮像範囲の最大距離を示す目標最大距離と、前記目標撮像範囲の最小距離を示す目標最小距離と、を取得し、
現在の前記基線長に基づく前記ステレオカメラ撮像範囲の最大距離を示す撮像最大距離と、前記ステレオカメラ撮像範囲の最小距離を示す撮像最小距離と、を取得し、
前記目標最大距離、前記目標最小距離、前記撮像最大距離、及び前記撮像最小距離に基づいて、前記目標基線長を決定する
請求項8に記載の移動体。 - 車両として設けられる請求項1に記載の移動体。
- 飛行体として設けられる請求項1に記載の移動体。
- 移動体が備える第1撮像部及び第2撮像部の可変的な撮像状態についての情報を示す状態変数に応じた目標基線長に、前記第1撮像部と前記第2撮像部との間の基線長が調整されるよう、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させ、
前記状態変数は、前記移動体の移動速度、前記第1撮像部及び前記第2撮像部の撮像方向の傾き、及び前記移動体の高度のうちの少なくとも1以上に関する情報を含む、
移動体の制御方法。 - コンピュータに、
移動体が備える第1撮像部及び第2撮像部の可変的な撮像状態についての情報を示す状態変数に応じた目標基線長に、前記第1撮像部と前記第2撮像部との間の基線長が調整されるよう、前記第1撮像部及び前記第2撮像部のうちの少なくともいずれか一方を移動させる手順を実行させるための、
プログラムであって、
前記状態変数は、前記移動体の移動速度、前記第1撮像部及び前記第2撮像部の撮像方向の傾き、及び前記移動体の高度のうちの少なくとも1以上に関する情報を含む、
プログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020213750A JP7659740B2 (ja) | 2020-12-23 | 2020-12-23 | 移動体、移動体の制御方法、及びプログラム |
| PCT/JP2021/041683 WO2022137876A1 (ja) | 2020-12-23 | 2021-11-12 | 移動体、移動体の制御方法、及びプログラム |
| US18/257,604 US12309348B2 (en) | 2020-12-23 | 2021-11-12 | Moving body and moving body control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020213750A JP7659740B2 (ja) | 2020-12-23 | 2020-12-23 | 移動体、移動体の制御方法、及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022099764A JP2022099764A (ja) | 2022-07-05 |
| JP7659740B2 true JP7659740B2 (ja) | 2025-04-10 |
Family
ID=82158997
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020213750A Active JP7659740B2 (ja) | 2020-12-23 | 2020-12-23 | 移動体、移動体の制御方法、及びプログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US12309348B2 (ja) |
| JP (1) | JP7659740B2 (ja) |
| WO (1) | WO2022137876A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116300039A (zh) * | 2023-03-09 | 2023-06-23 | 成都弘照科技有限公司 | 一种变基线交相角摄影的数字影像立体显微系统及方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004093457A (ja) | 2002-09-02 | 2004-03-25 | Toyota Motor Corp | 画像処理装置、及び画像処理方法 |
| JP2010223864A (ja) | 2009-03-25 | 2010-10-07 | Fujifilm Corp | 距離測定方法および装置 |
| JP2011145143A (ja) | 2010-01-14 | 2011-07-28 | Ricoh Co Ltd | 距離測定装置及び距離測定方法 |
| JP2013513095A (ja) | 2009-12-04 | 2013-04-18 | アルカテル−ルーセント | 物体の改善されたステレオ画像を得る方法およびシステム |
| JP2017505903A (ja) | 2014-12-04 | 2017-02-23 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 画像化システム及び方法 |
| US10607310B1 (en) | 2017-10-17 | 2020-03-31 | Amazon Technologies, Inc. | Determining ranges by imaging devices with dynamic baseline reconfiguration |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001305681A (ja) | 2000-04-19 | 2001-11-02 | Nippon Signal Co Ltd:The | ステレオカメラ装置 |
| JP2012118698A (ja) * | 2010-11-30 | 2012-06-21 | Fuji Heavy Ind Ltd | 画像処理装置 |
| JP7027914B2 (ja) * | 2018-01-31 | 2022-03-02 | トヨタ自動車株式会社 | 移動体、荷物仕分支援方法、荷物仕分支援プログラム及び荷物仕分支援システム |
| JP2021157204A (ja) | 2018-06-22 | 2021-10-07 | ソニーグループ株式会社 | 移動体および移動体の制御方法 |
| KR102751925B1 (ko) * | 2021-03-31 | 2025-01-10 | 한국전자통신연구원 | 다종목 스크린 스포츠 코칭용 임팩트 동작 인식 시스템 |
-
2020
- 2020-12-23 JP JP2020213750A patent/JP7659740B2/ja active Active
-
2021
- 2021-11-12 US US18/257,604 patent/US12309348B2/en active Active
- 2021-11-12 WO PCT/JP2021/041683 patent/WO2022137876A1/ja not_active Ceased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004093457A (ja) | 2002-09-02 | 2004-03-25 | Toyota Motor Corp | 画像処理装置、及び画像処理方法 |
| JP2010223864A (ja) | 2009-03-25 | 2010-10-07 | Fujifilm Corp | 距離測定方法および装置 |
| JP2013513095A (ja) | 2009-12-04 | 2013-04-18 | アルカテル−ルーセント | 物体の改善されたステレオ画像を得る方法およびシステム |
| JP2011145143A (ja) | 2010-01-14 | 2011-07-28 | Ricoh Co Ltd | 距離測定装置及び距離測定方法 |
| JP2017505903A (ja) | 2014-12-04 | 2017-02-23 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | 画像化システム及び方法 |
| US10607310B1 (en) | 2017-10-17 | 2020-03-31 | Amazon Technologies, Inc. | Determining ranges by imaging devices with dynamic baseline reconfiguration |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2022137876A1 (ja) | 2022-06-30 |
| US12309348B2 (en) | 2025-05-20 |
| US20240114121A1 (en) | 2024-04-04 |
| JP2022099764A (ja) | 2022-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12296951B2 (en) | Image space motion planning of an autonomous vehicle | |
| US11237572B2 (en) | Collision avoidance system, depth imaging system, vehicle, map generator and methods thereof | |
| CN108475059B (zh) | 自主视觉导航 | |
| CN106123908B (zh) | 车辆导航方法和系统 | |
| KR101539270B1 (ko) | 충돌회피 및 자율주행을 위한 센서융합 기반 하이브리드 반응 경로 계획 방법, 이를 수행하기 위한 기록 매체 및 이동로봇 | |
| KR102219843B1 (ko) | 자율주행을 위한 위치 추정 장치 및 방법 | |
| US20220210335A1 (en) | Autofocusing camera and systems | |
| CN110275538A (zh) | 智能巡航车导航方法及系统 | |
| JP5310285B2 (ja) | 自己位置推定装置及び自己位置推定方法 | |
| CN113467500A (zh) | 一种基于双目视觉的无人机非合作目标追踪系统 | |
| JP2014119901A (ja) | 自律移動ロボット | |
| CN105844692A (zh) | 基于双目立体视觉的三维重建装置、方法、系统及无人机 | |
| KR101319525B1 (ko) | 이동 로봇을 이용하여 목표물의 위치 정보를 제공하기 위한 시스템 | |
| JP7659740B2 (ja) | 移動体、移動体の制御方法、及びプログラム | |
| JP2020149186A (ja) | 位置姿勢推定装置、学習装置、移動ロボット、位置姿勢推定方法、学習方法 | |
| KR101319526B1 (ko) | 이동 로봇을 이용하여 목표물의 위치 정보를 제공하기 위한 방법 | |
| CN208314856U (zh) | 一种用于单目机载目标检测的系统 | |
| CN114003041A (zh) | 一种多无人车协同探测系统 | |
| WO2020024150A1 (zh) | 地图处理方法、设备、计算机可读存储介质 | |
| WO2019127192A1 (zh) | 图像处理方法和设备 | |
| CN116724279A (zh) | 可移动平台、可移动平台的控制方法及存储介质 | |
| KR100575108B1 (ko) | 비전 센서를 이용하여 다수 비행체를 도킹시키는 방법 | |
| Zhang et al. | Sensor-fusion-based Trajectory Reconstruction for Mobile Devices. | |
| SE2350556A1 (en) | A method for preparing an extrinsic calibration procedure | |
| CN120646266A (zh) | 一种用于三维地图制作的遥感采像无人机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241220 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20250217 |
|
| TRDD | Decision of grant or rejection written | ||
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20250227 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250228 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250313 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7659740 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |