JP7635504B2 - アスファルトフィニッシャ - Google Patents
アスファルトフィニッシャ Download PDFInfo
- Publication number
- JP7635504B2 JP7635504B2 JP2023511306A JP2023511306A JP7635504B2 JP 7635504 B2 JP7635504 B2 JP 7635504B2 JP 2023511306 A JP2023511306 A JP 2023511306A JP 2023511306 A JP2023511306 A JP 2023511306A JP 7635504 B2 JP7635504 B2 JP 7635504B2
- Authority
- JP
- Japan
- Prior art keywords
- hopper
- screed
- paving material
- front wheels
- driving force
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000010426 asphalt Substances 0.000 title claims description 74
- 239000010720 hydraulic oil Substances 0.000 claims description 124
- 239000000463 material Substances 0.000 claims description 119
- 239000003921 oil Substances 0.000 claims description 48
- 230000007423 decrease Effects 0.000 claims description 25
- 230000008859 change Effects 0.000 claims description 5
- 238000012544 monitoring process Methods 0.000 claims description 4
- 230000004044 response Effects 0.000 description 17
- 238000006073 displacement reaction Methods 0.000 description 11
- 238000010276 construction Methods 0.000 description 10
- 238000010586 diagram Methods 0.000 description 9
- 230000032258 transport Effects 0.000 description 9
- 238000005056 compaction Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 7
- 230000009467 reduction Effects 0.000 description 7
- 101100340248 Arabidopsis thaliana SCRM gene Proteins 0.000 description 5
- 239000013256 coordination polymer Substances 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 102100039028 Protein SPO16 homolog Human genes 0.000 description 3
- 101150108548 SPO16 gene Proteins 0.000 description 3
- 101710189490 Spore cortex-lytic enzyme Proteins 0.000 description 3
- 238000003384 imaging method Methods 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000008602 contraction Effects 0.000 description 2
- 238000007599 discharging Methods 0.000 description 2
- 230000002411 adverse Effects 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000007667 floating Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000002706 hydrostatic effect Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000001141 propulsive effect Effects 0.000 description 1
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/48—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for laying-down the materials and consolidating them, or finishing the surface, e.g. slip forms therefor, forming kerbs or gutters in a continuous operation in situ
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Road Paving Machines (AREA)
Description
トラクタと、
前記トラクタの前側に設置されて舗装材を受け入れるホッパと、
前記ホッパ内の前記舗装材を前記トラクタの後側へ搬送するコンベアと、
前記コンベアにより搬送された前記舗装材を前記トラクタの後側で敷き拡げるスクリュと、
前記スクリュにより敷き拡げられた前記舗装材を前記スクリュの後側で敷き均すスクリードと、
前記ホッパ内の前記舗装材の重量に基づき、前記トラクタの前輪の駆動力を制御する制御部と、
前記重量を推定する推定部と、
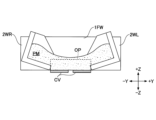
前記ホッパ内の前記舗装材の状態を監視するためのデータを取得する空間認識装置と、を備え、
前記推定部は、前記空間認識装置の出力に基づき、前記重量を推定し、
前記制御部は、前記推定部による前記重量の推定結果に基づき、前記トラクタの前輪の駆動力を制御する、
アスファルトフィニッシャが提供される。
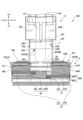
まず、図1を参照して、本実施形態に係るアスファルトフィニッシャ100の全体構成について説明する。
次に、図1A、図1Bに加え、図2を参照して、コントローラ50の機能構成について説明する。具体的には、前輪6の駆動力の調整機能(以下、「前輪駆動力調整機能」)に関するコントローラ50の機能構成について説明する。
次に、図3を参照して、アスファルトフィニッシャ100に搭載される油圧システムについて説明する。
次に、図1~図3に加えて、図4、図5を参照して、コントローラ50による前輪6の駆動力の調整方法について具体的に説明する。
次に、本実施形態に係るアスファルトフィニッシャ100の作用について説明する。
2 ホッパ
2W ホッパウイング
2WL 左ホッパウイング
2WR 右ホッパウイング
3 スクリード
3A レベリングアーム
5 後輪
6 前輪
14 油圧源
14C チャージポンプ
14E エンジン
14F 前輪走行用ポンプ(油圧ポンプ)
14M シリンダ用ポンプ
14R 後輪走行用ポンプ
14S コンベア・スクリュ用ポンプ
20L 左後輪走行用モータ
20La チェック弁
20Lb リリーフ弁
20R 右後輪走行用モータ
20Ra チェック弁
20Rb リリーフ弁
21 コンベア・スクリュ用モータ
21CL 左コンベア用モータ
21CR 右コンベア用モータ
21SL 左スクリュ用モータ
21SR 右スクリュ用モータ
22 前輪走行用モータ(油圧モータ)
23 レベリングシリンダ
23L 左レベリングシリンダ
23R 右レベリングシリンダ
24 ホッパシリンダ
24L 左ホッパシリンダ
24R 右ホッパシリンダ
25 スクリードリフトシリンダ
25L 左スクリードリフトシリンダ
25R 右スクリードリフトシリンダ
27 スクリード伸縮シリンダ
27L 左スクリード伸縮シリンダ
27R 右スクリード伸縮シリンダ
30 メインスクリード
31 伸縮スクリード
33 レベリング用制御弁
33L 左レベリング用制御弁
33R 右レベリング用制御弁
33P、33PaL、33PaR、33PbL、33PbR パイロットチェック弁
34 ホッパ用制御弁
34L 左ホッパ用制御弁
34R 右ホッパ用制御弁
34P、34PL、34PR パイロットチェック弁
35 スクリードリフト用制御弁
35a 切替弁
35b リリーフ弁
35c 切替弁
37 スクリード伸縮用制御弁
37P、37PaL、37PaR、37PbL、37PbR パイロットチェック弁
37V リリーフ弁
37VL 左リリーフ弁
37VR 右リリーフ弁
40 サイドプレート
41 伸縮モールドボード
42 スクリードステップ
43 リテーニングプレート
50 コントローラ
50A 舗装材重量取得部
50B 前輪駆動力制御部(制御部)
100 アスファルトフィニッシャ
CM 空間認識装置
CP 搬送通路
CV コンベア
F1 後輪駆動部
F2 コンベア・スクリュ駆動部
F3 前輪駆動部
F4 操舵・締め固め装置駆動部
F5 レベリング部
F6 ホッパ駆動部
F7 スクリードリフト部
F8 スクリード伸縮部
OC オイルクーラ
OP 入口
RV リリーフ弁
SC スクリュ
SCLE 左延長スクリュ
SCLM 左メインスクリュ
SCRE 右延長スクリュ
SCRM 右メインスクリュ
V0 減速機切替弁
V1C コンベア用制御弁
V1CL 左コンベア用制御弁
V1CR 右コンベア用制御弁
V1S スクリュ用制御弁
V1SL 左スクリュ用制御弁
V1SR 右スクリュ用制御弁
V2 前輪走行用弁
Claims (10)
- トラクタと、
前記トラクタの前側に設置されて舗装材を受け入れるホッパと、
前記ホッパ内の前記舗装材を前記トラクタの後側へ搬送するコンベアと、
前記コンベアにより搬送された前記舗装材を前記トラクタの後側で敷き拡げるスクリュと、
前記スクリュにより敷き拡げられた前記舗装材を前記スクリュの後側で敷き均すスクリードと、
前記ホッパ内の前記舗装材の重量に基づき、前記トラクタの前輪の駆動力を制御する制御部と、
前記重量を推定する推定部と、
前記ホッパ内の前記舗装材の状態を監視するためのデータを取得する空間認識装置と、を備え、
前記推定部は、前記空間認識装置の出力に基づき、前記重量を推定し、
前記制御部は、前記推定部による前記重量の推定結果に基づき、前記トラクタの前輪の駆動力を制御する、
アスファルトフィニッシャ。 - 前記制御部は、前記重量の変化に合わせて、前記トラクタの前輪の駆動力を変化させる、
請求項1に記載のアスファルトフィニッシャ。 - 前記制御部は、前記トラクタの走行中において、前記重量の変化に合わせて変更される目標値を維持するように前記前輪の駆動力を制御する、
請求項2に記載のアスファルトフィニッシャ。 - 前記制御部は、前記重量が減少すると、前記前輪の駆動力を減少させる、
請求項2又は3に記載のアスファルトフィニッシャ。 - 前記前輪を駆動する油圧モータと、
前記油圧モータに作動油を供給する油圧ポンプと、
前記油圧ポンプと前記油圧モータとの間の油路に設けられるリリーフ弁とを備え、
前記制御部は、前記リリーフ弁のリリーフ圧を調整することにより、前記前輪の駆動力を制御する、
請求項1乃至4の何れか一項に記載のアスファルトフィニッシャ。 - 前記制御部は、前記油圧ポンプの斜板の角度を調整することにより、前記前輪の駆動力を制御する、
請求項5に記載のアスファルトフィニッシャ。 - 前記制御部は、前記重量が小さくなるほど前記リリーフ圧が小さくなるように規定される、前記重量と前記リリーフ圧との間の関係を表す制御則によって、前記リリーフ弁の前記リリーフ圧を調整する、
請求項5又は6に記載のアスファルトフィニッシャ。 - 前記制御部は、前記重量が小さくなるほど前記前輪の駆動力の目標値が小さくなるように規定される、前記重量と前記前輪の駆動力の目標値との関係を表す制御則に沿って、前記前輪の駆動力の目標値を設定し、前記前輪の駆動力の目標値と前記リリーフ圧との関係を表す制御則に沿って、前記前輪の駆動力の目標値を実現するように前記リリーフ弁の前記リリーフ圧を調整する、
請求項5又は6に記載のアスファルトフィニッシャ。 - 前記空間認識装置の出力に基づき、前記ホッパの開閉状態を考慮して、前記ホッパ内の前記舗装材の体積を推定し、推定した体積に基づき、前記重量を推定する、
請求項1乃至8の何れか一項に記載のアスファルトフィニッシャ。 - 前記空間認識装置の出力に基づき、前記ホッパ内の前記舗装材の体積を推定し、推定した体積に基づき、前記ホッパを自動で閉動作させる、
請求項1乃至9の何れか一項に記載のアスファルトフィニッシャ。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021057823 | 2021-03-30 | ||
| JP2021057823 | 2021-03-30 | ||
| PCT/JP2022/015201 WO2022210608A1 (ja) | 2021-03-30 | 2022-03-28 | アスファルトフィニッシャ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JPWO2022210608A1 JPWO2022210608A1 (ja) | 2022-10-06 |
| JPWO2022210608A5 JPWO2022210608A5 (ja) | 2024-01-12 |
| JP7635504B2 true JP7635504B2 (ja) | 2025-02-26 |
Family
ID=83459239
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023511306A Active JP7635504B2 (ja) | 2021-03-30 | 2022-03-28 | アスファルトフィニッシャ |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4317582A4 (ja) |
| JP (1) | JP7635504B2 (ja) |
| CN (1) | CN117321267A (ja) |
| WO (1) | WO2022210608A1 (ja) |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020063650A (ja) | 2019-03-29 | 2020-04-23 | 住友建機株式会社 | アスファルトフィニッシャ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6414204U (ja) * | 1987-07-14 | 1989-01-25 | ||
| JPH0732573Y2 (ja) * | 1990-11-19 | 1995-07-26 | 新キャタピラー三菱株式会社 | 四輪駆動アスファルトフィニッシャにおける前輪駆動力制御装置 |
| DE102010014901A1 (de) * | 2010-04-14 | 2011-10-20 | Bomag Gmbh | Vorderantrieb eines Straßenfertigers und Verfahren zur Steuerung desselben |
| US10378160B2 (en) * | 2015-12-15 | 2019-08-13 | Freeport-Mcmoran Inc. | Systems and methods of determining road quality |
| JP7146767B2 (ja) * | 2017-08-08 | 2022-10-04 | 住友建機株式会社 | 道路機械 |
| CN108018760A (zh) * | 2017-11-28 | 2018-05-11 | 中山晶诚机电设备有限公司 | 一种防水材料铺设车 |
-
2022
- 2022-03-28 JP JP2023511306A patent/JP7635504B2/ja active Active
- 2022-03-28 EP EP22780819.3A patent/EP4317582A4/en active Pending
- 2022-03-28 WO PCT/JP2022/015201 patent/WO2022210608A1/ja not_active Ceased
- 2022-03-28 CN CN202280020082.9A patent/CN117321267A/zh active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020063650A (ja) | 2019-03-29 | 2020-04-23 | 住友建機株式会社 | アスファルトフィニッシャ |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4317582A4 (en) | 2024-08-28 |
| EP4317582A1 (en) | 2024-02-07 |
| JPWO2022210608A1 (ja) | 2022-10-06 |
| WO2022210608A1 (ja) | 2022-10-06 |
| CN117321267A (zh) | 2023-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6878317B2 (ja) | 作業車両の制御システム、及び作業機の軌跡設定方法 | |
| US20200122538A1 (en) | Ride control systems and methods for rotary cutting machines | |
| CN114174596A (zh) | 挖土机 | |
| JP7122800B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| JP6826832B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| CN102465486A (zh) | 用于铣刨土壤或交通区域的地面处理机械以及方法 | |
| JP6861485B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| JP6934286B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| WO2018021340A1 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| JP6876389B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| WO2021192969A1 (ja) | 作業車両 | |
| US12606981B2 (en) | Load discharge system | |
| JP7049884B2 (ja) | 作業車両の制御システム、方法、及び作業車両 | |
| CN108779618A (zh) | 作业车辆的控制系统、控制方法及作业车辆 | |
| CA3071963A1 (en) | Control system for work vehicle, method, and work vehicle | |
| JP7635504B2 (ja) | アスファルトフィニッシャ | |
| JP6419521B2 (ja) | 道路機械 | |
| CN114901909A (zh) | 沥青滚平机及机器学习装置 | |
| JP7740800B2 (ja) | 道路機械 | |
| JP7581581B2 (ja) | アスファルトフィニッシャ及び機械学習装置 | |
| CN113597489A (zh) | 沥青滚平机 | |
| EP4253657A1 (en) | Asphalt finisher | |
| JP6934287B2 (ja) | 作業車両の制御システム、制御方法、及び作業車両 | |
| EP4335970B1 (en) | Asphalt finisher | |
| JP2022154675A (ja) | アスファルトフィニッシャ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A527 Effective date: 20230904 |
|
| A625 | Written request for application examination (by other person) |
Free format text: JAPANESE INTERMEDIATE CODE: A625 Effective date: 20240712 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241015 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20250114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20250124 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7635504 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |