JP7608832B2 - 機械学習装置及び故障判定装置 - Google Patents
機械学習装置及び故障判定装置 Download PDFInfo
- Publication number
- JP7608832B2 JP7608832B2 JP2021000767A JP2021000767A JP7608832B2 JP 7608832 B2 JP7608832 B2 JP 7608832B2 JP 2021000767 A JP2021000767 A JP 2021000767A JP 2021000767 A JP2021000767 A JP 2021000767A JP 7608832 B2 JP7608832 B2 JP 7608832B2
- Authority
- JP
- Japan
- Prior art keywords
- aviation obstruction
- learning model
- obstruction light
- machine learning
- learning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Circuit Arrangement For Electric Light Sources In General (AREA)
Description
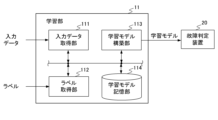
まず、本実施形態に係る故障判定システム100の構成について説明する。図1は、本実施形態に係る故障判定システムを示すブロック図である。故障判定システム100は、図1に示すように、機械学習装置10及び故障判定装置20を備えている。
次に、本実施形態に係る故障判定システム100の動作について説明する。まず、図4を参照し、機械学習装置10の動作について説明する。
図4は、学習部11の動作を示すフローチャートである。
ステップS11において、入力データ取得部111が、航空障害灯を被写体として含む写真を入力データとして取得する。
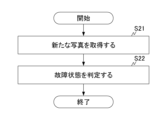
次に、図5を参照し、故障判定装置20の動作について説明する。
以上、本発明の実施形態について説明したが、本発明は前述した実施形態に限るものではない。また、本実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、本実施形態に記載されたものに限定されるものではない。
上記の実施形態において、機械学習装置10と故障判定装置20とを別体として示したが、これには限定されない。例えば、機械学習装置10が故障判定装置20の筐体に組み込まれることにより、故障判定システム100が一体化されて実現される態様としてもよい。
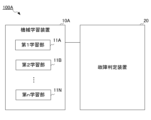
また、上記の実施形態において、複数の航空障害灯に対して一つの学習モデルを構築するが、これには限定されない。図6は、本変形例に係る故障判定システム100Aの構成を示す。図6に示すように、機械学習装置10Aが、各々が各航空障害灯に対応する複数の学習部(第1学習部11A~第n学習部11N)を備えることにより、各々が各航空障害灯に対応する複数の学習モデルを構築してもよい。すなわち、機械学習装置10Aは、複数の航空障害灯の各々に対して一つずつ学習モデルを構築してもよい。
11 学習部
20 故障判定装置
21 制御部
22 記憶部
23 表示部
100,100A 故障判定システム
111 入力データ取得部
112 ラベル取得部
113 学習モデル構築部
114 学習モデル記憶部
211 写真取得部
212 故障状態判定部
Claims (4)
- 航空障害灯の故障を判定するための学習モデルを構築する機械学習装置であって、
前記航空障害灯を撮像した写真を入力データとして取得する入力データ取得手段と、
前記写真において被写体とされる前記航空障害灯の故障状態の判定結果をラベルとして取得するラベル取得手段と、
前記入力データと前記ラベルとの組を教師データとして教師あり学習を行うことにより、前記航空障害灯を被写体として含む新たな写真における当該航空障害灯の故障状態を判定するための学習モデルを構築する学習モデル構築手段と、
を備え、
前記入力データ取得手段は、前記航空障害灯を撮像した時点での天気が晴天、曇天、雨天の各々の場合の写真を入力データとして取得し、
前記ラベル取得手段は、前記航空障害灯を撮像した時点での天気が晴天、曇天、雨天の各々の場合の写真ごとに、前記航空障害灯の故障状態の判定結果を取得し、
前記学習モデル構築手段は、前記航空障害灯を撮像した時点での天気が晴天、曇天、雨天の各々の場合の写真と、当該写真に対応した前記航空障害灯の故障状態の判定結果と、の組を教師データとして教師あり学習を行うことにより、前記学習モデルを構築する機械学習装置。 - 前記学習モデル構築手段は、複数の前記航空障害灯に対して一つの学習モデルを構築する、請求項1に記載の機械学習装置。
- 前記学習モデル構築手段は、複数の前記航空障害灯の各々に対して一つずつ学習モデルを構築する、請求項1に記載の機械学習装置。
- 請求項1から請求項3のいずれか1項に記載の機械学習装置で構築した前記学習モデルを用いた故障判定装置であって、
前記写真と前記学習モデルとに基づいて、前記航空障害灯の故障状態を判定する故障状態判定手段と、
を備える故障判定装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021000767A JP7608832B2 (ja) | 2021-01-06 | 2021-01-06 | 機械学習装置及び故障判定装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021000767A JP7608832B2 (ja) | 2021-01-06 | 2021-01-06 | 機械学習装置及び故障判定装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022106059A JP2022106059A (ja) | 2022-07-19 |
| JP7608832B2 true JP7608832B2 (ja) | 2025-01-07 |
Family
ID=82448980
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021000767A Active JP7608832B2 (ja) | 2021-01-06 | 2021-01-06 | 機械学習装置及び故障判定装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7608832B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014235806A (ja) | 2013-05-31 | 2014-12-15 | 株式会社ジェイ・パワーシステムズ | 航空障害灯の故障検出システム及び故障検出方法 |
| JP2020030695A (ja) | 2018-08-23 | 2020-02-27 | 株式会社Ihi | 教師データ生成装置及び機械学習システム |
| JP2020525978A (ja) | 2017-06-27 | 2020-08-27 | シグニファイ ホールディング ビー ヴィSignify Holding B.V. | 資産位置特定、性能評価及び障害検出のための方法及びシステム |
| WO2020229923A1 (en) | 2019-05-13 | 2020-11-19 | International Business Machines Corporation | Counter rare training date for artificial intelligence |
-
2021
- 2021-01-06 JP JP2021000767A patent/JP7608832B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014235806A (ja) | 2013-05-31 | 2014-12-15 | 株式会社ジェイ・パワーシステムズ | 航空障害灯の故障検出システム及び故障検出方法 |
| JP2020525978A (ja) | 2017-06-27 | 2020-08-27 | シグニファイ ホールディング ビー ヴィSignify Holding B.V. | 資産位置特定、性能評価及び障害検出のための方法及びシステム |
| JP2020030695A (ja) | 2018-08-23 | 2020-02-27 | 株式会社Ihi | 教師データ生成装置及び機械学習システム |
| WO2020229923A1 (en) | 2019-05-13 | 2020-11-19 | International Business Machines Corporation | Counter rare training date for artificial intelligence |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022106059A (ja) | 2022-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12276579B2 (en) | System for abnormal condition detection using nearest neighbor | |
| JP6936650B2 (ja) | モデル学習装置、学習済みモデルの生成方法、プログラム、学習済みモデル、監視装置、および監視方法 | |
| WO2021114866A1 (zh) | 遮挡图像检测方法、装置、电子设备及存储介质 | |
| CN108846841A (zh) | 显示屏质量检测方法、装置、电子设备及存储介质 | |
| CN106354604A (zh) | 终端温度的调节方法和调节装置 | |
| CN118244658B (zh) | 照明装置的智能控制方法、装置、监控设备、芯片及存储介质 | |
| CN112383137A (zh) | 基于机器视觉和热成像技术的变压器台区监控系统及方法 | |
| JP7697476B2 (ja) | 設備点検支援システム、設備点検支援方法、及び、設備点検支援プログラム | |
| CN118917635A (zh) | 一种基于目标检测的灾害智能监控与决策的方法及系统 | |
| JP7608832B2 (ja) | 機械学習装置及び故障判定装置 | |
| CN113705442A (zh) | 一种户外大牌广告画面监控识别系统及方法 | |
| JP2021056574A (ja) | インフラ管理システム | |
| CN110321378A (zh) | 一种移动监控图像识别系统及方法 | |
| KR102703481B1 (ko) | 태양광 발전소에 대한 관리 정보를 바탕으로 태양광 발전소의 유지 및 보수를 지원하는 서버의 동작 방법 | |
| CN110209558B (zh) | 基于软件定义存储的智能运维方法和装置 | |
| CN118920701A (zh) | 分布式光伏电站智能运维系统 | |
| CN117237873A (zh) | 基于机器视觉的电网工程监理方法及装置 | |
| US20180238773A1 (en) | Algorithm for abnormal condition detection using nearest neighbor | |
| CN116526959A (zh) | 一种光伏组件的清洗方法及装置 | |
| JP7672039B2 (ja) | 状態推定システム、クラウドサーバ、通信方法、端末装置の制御方法、及び、プログラム | |
| CN118429789B (zh) | 水产病害数据处理方法及系统 | |
| US20250315929A1 (en) | Techniques for image-based operational health detection | |
| CN119031009B (zh) | 基于智慧水表的节水载体数据处理方法、系统及设备 | |
| US11495105B2 (en) | Solar panel efficiency and security monitoring device | |
| CN119338261B (zh) | 水上施工现场的监测信息处理方法、展示方法与装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20231220 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240930 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20241001 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20241108 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241202 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7608832 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |