JP7601691B2 - 自律型無人潜水機および制御プログラム - Google Patents
自律型無人潜水機および制御プログラム Download PDFInfo
- Publication number
- JP7601691B2 JP7601691B2 JP2021063183A JP2021063183A JP7601691B2 JP 7601691 B2 JP7601691 B2 JP 7601691B2 JP 2021063183 A JP2021063183 A JP 2021063183A JP 2021063183 A JP2021063183 A JP 2021063183A JP 7601691 B2 JP7601691 B2 JP 7601691B2
- Authority
- JP
- Japan
- Prior art keywords
- hull
- contour
- straight line
- unit
- point
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Landscapes
- Manipulator (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Description
取得部31、特定部32、第1抽出部33、第1直線算出部34、推進制御部35は、AUV1が海底パイプラインPを辿るための自律航走処理を実行する。自律航走処理について、自律航走処理の流れを示す図4を参照して説明する。
制御装置4は、艇体2が移動する間、海底パイプラインPにツール14を接触させる、あるいは、ツール14と海底パイプラインPとの距離が所定の範囲内に収まるように海底パイプラインPにツール14を接近させるためのアーム制御処理を実行する。アーム制御処理は、取得部31、特定部32、第2抽出部36、第2直線算出部37、アーム制御部38により実行される。以下、アーム制御処理について、図6、7を参照して説明する。
本発明は、上述した実施形態に限定されるものではなく、本発明の要旨を逸脱しない範囲で種々の変形が可能である。
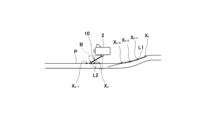
2 :艇体
3 :推進装置
4 :制御装置
5 :輪郭検出器
6 :慣性航法装置
7 :速度測定器
8 :記憶装置
10 :ロボットアーム
31 :取得部
32 :特定部
33 :第1抽出部
34 :第1直線算出部
35 :推進制御部
36 :第2抽出部
37 :第2直線算出部
38 :アーム制御部
P :海底パイプライン
G :海底
Claims (9)
- 水中にて延在する水中構造物の上方で前記水中構造物に沿って航走する自律型無人潜水機であって、
艇体と、
前記艇体に設けられ、前記艇体の前後方向に前記艇体を移動可能で且つ少なくとも前記艇体のヨー方向に姿勢変更可能な推進装置と、
前記艇体に設けられ、前記艇体から前斜め下に向かう方向に切断した断面における前記水中構造物の上面の輪郭を検出する輪郭検出器と、
前記艇体に設けられた制御装置および記憶装置と、を備え、
前記制御装置は、
前記艇体が移動する間、所定間隔おきに前記輪郭検出器により検出された前記輪郭を取得する取得部と、
取得した前記輪郭ごとに、前記輪郭上の特定点を前記記憶装置に記憶する特定部と、
記憶された複数の前記特定点から、前記艇体の現在位置より前方に位置する複数の前記特定点を抽出する抽出部と、
抽出した複数の前記特定点の近似直線を算出する直線算出部と、
前記艇体を上面視して前記艇体の前後方向と前記近似直線とのなす角が小さくなり、且つ、前記艇体を上面視して前記艇体の所定箇所と前記近似直線との距離が小さくなるように、前記推進装置を制御する推進制御部と、を含む、自律型無人潜水機。 - 前記水中構造物は、海底パイプライン、および、前記海底パイプラインを覆うカバー構造物のうちの少なくとも1つを含む、請求項1に記載の自律型無人潜水機。
- 前記特定部は、前記輪郭の左右方向における中心点であるという条件、および、前記輪郭の上下方向における最上点であるという条件のいずれかを満たす前記輪郭上の点を、前記特定点として特定する、請求項1または2に記載の自律型無人潜水機。
- 前記近似直線は、3次元座標系における直線であり、
前記推進装置は、前記艇体のピッチ方向に姿勢変更可能であり、
前記推進制御部は、前記艇体を側面視して前記艇体の前後方向と前記近似直線とのなす角が小さくなるように、前記推進装置を制御する、請求項1~3のいずれか1項に記載の自律型無人潜水機。 - 前記艇体の速度を測定する速度測定器を有し、
前記抽出部は、前記速度測定器により測定された速度に応じて、記憶された複数の前記特定点の中から、抽出する複数の前記特定点の範囲または個数を変更する、請求項1~4のいずれか1項に記載の自律型無人潜水機。 - 前記艇体から延びるロボットアームを更に備え、
前記抽出部および前記直線算出部は、それぞれ、第1抽出部および第1直線算出部であり、
前記制御装置は、
記憶された複数の前記特定点から、前記艇体の現在位置より後方の複数の前記特定点を、アーム用抽出点として抽出する第2抽出部と、
抽出した複数の前記アーム用抽出点の近似直線を、第2近似直線として算出する第2直線算出部と、
前記ロボットアームの可動範囲内の所定の曲面と前記第2近似直線との交点に、前記ロボットアームの先端部が位置するように、前記ロボットアームを制御するアーム制御部と、を更に含む、請求項1~5のいずれか1項に記載の自律型無人潜水機。 - 前記所定の曲面は、前記ロボットアームの前記可動範囲を画定する境界面である、請求項6に記載の自律型無人潜水機。
- 前記第2抽出部は、前記境界面の内側にある第1特定点、および、前記境界面の外側にあり且つ前記特定部が前記第1特定点を特定する直前に特定した第2特定点を、前記アーム用抽出点として抽出し、
前記第2直線算出部は、前記第1特定点と前記第2特定点とを通過する直線を前記第2近似直線として算出する、請求項7に記載の自律型無人潜水機。 - 水中にて延在する水中構造物の上方で前記水中構造物に沿って航走する自律型無人潜水機の動作を制御するための制御プログラムであって、
前記自律型無人潜水機は、艇体と、前記艇体の前後方向に前記艇体を移動可能で且つ少なくとも前記艇体のヨー方向に姿勢変更可能な推進装置と、前記艇体から前斜め下に向かう方向に切断した断面における前記水中構造物の上面の輪郭を検出する輪郭検出器と、記憶装置と、を備え、
前記艇体が移動する間、所定間隔おきに前記輪郭検出器により検出された前記輪郭を取得する取得部と、
取得した前記輪郭ごとに、前記輪郭上の特定点を前記記憶装置に記憶する特定部と、
記憶された複数の前記特定点から、前記艇体の現在位置より前方に位置する複数の前記特定点を抽出する抽出部と、
抽出した複数の前記特定点の近似直線を算出する直線算出部と、
前記艇体を上面視して前記艇体の前後方向と前記近似直線とのなす角が小さくなり、且つ、前記艇体を上面視して前記艇体の所定箇所と前記近似直線との距離が小さくなるように、前記推進装置を制御する推進制御部と、
をコンピュータに機能させる、制御プログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021063183A JP7601691B2 (ja) | 2021-04-01 | 2021-04-01 | 自律型無人潜水機および制御プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021063183A JP7601691B2 (ja) | 2021-04-01 | 2021-04-01 | 自律型無人潜水機および制御プログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022158359A JP2022158359A (ja) | 2022-10-17 |
| JP7601691B2 true JP7601691B2 (ja) | 2024-12-17 |
Family
ID=83638666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021063183A Active JP7601691B2 (ja) | 2021-04-01 | 2021-04-01 | 自律型無人潜水機および制御プログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7601691B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102652885B1 (ko) * | 2023-07-31 | 2024-04-02 | 주식회사 칼만 | 다자유도 로봇팔이 탑재된 수중로봇의 제어방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040042342A1 (en) | 2001-01-03 | 2004-03-04 | Hudson Steve Martin | Subsea navigation and survey |
| JP2008265651A (ja) | 2007-04-24 | 2008-11-06 | Mitsubishi Heavy Ind Ltd | 水中航走体運動制御装置および水中航走体 |
| DE102010051491A1 (de) | 2010-11-15 | 2012-05-16 | Atlas Elektronik Gmbh | Unterwasserfahrzeug und Unterwassersystem mit einem Unterwasserfahrzeug |
| JP2013067358A (ja) | 2011-09-26 | 2013-04-18 | Kawasaki Heavy Ind Ltd | 水中移動型検査装置及び水中検査設備 |
| JP2019182214A (ja) | 2018-04-10 | 2019-10-24 | 川崎重工業株式会社 | 自律型無人潜水機 |
| CN110539867A (zh) | 2019-09-17 | 2019-12-06 | 吕梁学院 | 一种仿真水质检测机器海豚 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1124718A (ja) * | 1997-07-07 | 1999-01-29 | Toshiba Corp | ロボットの制御装置及び制御方法 |
| JPH11139392A (ja) * | 1997-11-07 | 1999-05-25 | Nec Corp | 水中航走体舵制御方式 |
-
2021
- 2021-04-01 JP JP2021063183A patent/JP7601691B2/ja active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040042342A1 (en) | 2001-01-03 | 2004-03-04 | Hudson Steve Martin | Subsea navigation and survey |
| JP2008265651A (ja) | 2007-04-24 | 2008-11-06 | Mitsubishi Heavy Ind Ltd | 水中航走体運動制御装置および水中航走体 |
| DE102010051491A1 (de) | 2010-11-15 | 2012-05-16 | Atlas Elektronik Gmbh | Unterwasserfahrzeug und Unterwassersystem mit einem Unterwasserfahrzeug |
| JP2013067358A (ja) | 2011-09-26 | 2013-04-18 | Kawasaki Heavy Ind Ltd | 水中移動型検査装置及び水中検査設備 |
| JP2019182214A (ja) | 2018-04-10 | 2019-10-24 | 川崎重工業株式会社 | 自律型無人潜水機 |
| CN110539867A (zh) | 2019-09-17 | 2019-12-06 | 吕梁学院 | 一种仿真水质检测机器海豚 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022158359A (ja) | 2022-10-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7258062B2 (ja) | 自動位置配置システム | |
| US12481297B2 (en) | Ship docking assistance device | |
| JP6905737B2 (ja) | 自律型水中ロボット及びその制御方法 | |
| US20140165898A1 (en) | Unmanned Underwater Vehicle and Method for Localizing and Examining An Object Arranged At The Bottom Of A Body Of Water and System Having the Unmanned Underwater Vehicle | |
| JP6761216B2 (ja) | 水中航走体の経路設定方法、それを用いた水中航走体の最適制御方法及び水中航走体並びに移動体の経路設定方法 | |
| US20140012434A1 (en) | Sensor location method and system | |
| US11862026B2 (en) | Marine propulsion control system and method with proximity-based velocity limiting | |
| JP3949932B2 (ja) | 自律型水中航走体の航走制御装置 | |
| JP7539552B2 (ja) | 情報処理装置、制御方法、プログラム及び記憶媒体 | |
| JPH08249060A (ja) | 自律型水中航走装置 | |
| KR102140650B1 (ko) | 무인잠수정의 수중 항법 성능 평가 방법 | |
| JP7601691B2 (ja) | 自律型無人潜水機および制御プログラム | |
| JP7748811B2 (ja) | 情報処理装置、制御方法、プログラム及び記憶媒体 | |
| JP7362343B2 (ja) | 水中作業システム | |
| JP7724302B2 (ja) | 情報処理装置、制御方法、プログラム及び記憶媒体 | |
| JP2025174996A (ja) | 情報処理装置、判定方法、プログラム及び記憶媒体 | |
| US20240151849A1 (en) | Information processing device, control method, program, and storage medium | |
| CN113219492A (zh) | 一种河道船舶行驶定位导航的方法及系统 | |
| Hurtos et al. | Sonar-based chain following using an autonomous underwater vehicle | |
| JP7549129B2 (ja) | 地図データ構造、記憶装置、情報処理装置、制御方法、プログラム及び記憶媒体 | |
| Kim et al. | Imaging sonar based navigation method for backtracking of AUV | |
| Chun et al. | Tracking Mooring Lines of Floating Structures by an Autonomous Underwater Vehicle | |
| JP7750661B2 (ja) | 情報処理装置、制御方法、プログラム及び記憶媒体 | |
| JP2025161095A (ja) | ロボット装置、ロボットの制御方法、プログラム | |
| Midtgaard et al. | Autonomous Underwater Vehicle for Mine Reconnaissance |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220603 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240730 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241119 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241205 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7601691 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |