JP7581383B2 - 位置特定のための衛星組合せを選択する方法 - Google Patents
位置特定のための衛星組合せを選択する方法 Download PDFInfo
- Publication number
- JP7581383B2 JP7581383B2 JP2022574169A JP2022574169A JP7581383B2 JP 7581383 B2 JP7581383 B2 JP 7581383B2 JP 2022574169 A JP2022574169 A JP 2022574169A JP 2022574169 A JP2022574169 A JP 2022574169A JP 7581383 B2 JP7581383 B2 JP 7581383B2
- Authority
- JP
- Japan
- Prior art keywords
- satellite
- gnss
- satellites
- sorting
- weighting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/28—Satellite selection
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/25—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS
- G01S19/258—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS relating to the satellite constellation, e.g. almanac, ephemeris data, lists of satellites in view
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/421—Determining position by combining or switching between position solutions or signals derived from different satellite radio beacon positioning systems; by combining or switching between position solutions or signals derived from different modes of operation in a single system
- G01S19/426—Determining position by combining or switching between position solutions or signals derived from different satellite radio beacon positioning systems; by combining or switching between position solutions or signals derived from different modes of operation in a single system by combining or switching between position solutions or signals derived from different modes of operation in a single system
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/01—Determining conditions which influence positioning, e.g. radio environment, state of motion or energy consumption
- G01S5/011—Identifying the radio environment
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Description
全地球航法衛星システム(GNSS)を用いて、地球のあらゆる地点において位置特定を実行することが可能である。GNSS衛星は、地球周回軌道内に存在しており、GNSS受信機によって受信され、受信機と衛星との間の距離を計算するために使用され得る符号化された信号を送信する。これは、GNSS衛星から受信機への信号伝搬時間によって発生する時間差を、距離特定のために使用することによって行われる。衛星までの距離を、GNSS受信機の位置の推定のために使用することができ、十分な数の衛星によって信号が受信されることが、これに対する前提条件となる。典型的には、5個以上の衛星による信号の受信が可能な場合には、正確な位置特定が可能である。現在、約120個のGNSS衛星が地球周回軌道内に存在する。これは、地球上のあらゆる地点において、幾何学的地平線において最大で約65個の衛星が可視であることを意味する。
従って、位置特定のための衛星の組合せを選択する新規のアプローチが提案される。
a)衛星信号の分散度を考慮する、予め定められた基準カタログに従って、少なくとも2つの異なるソートアルゴリズムを用いて可視のGNSS衛星をソートし、予め定められた各基準カタログに従って、低い分散度を有する衛星信号を有するGNSS衛星を求める少なくとも2つの衛星プレソート物を求めるステップと、
b)ステップa)において作成された衛星プレソート物に重み付けする重み付け関数を選択するステップと、
c)重み付された最終的な衛星ソート物が生じるように、各重み付け関数に従って衛星プレソート物を重み付けすることによって最終的な衛星ソート物を作成するステップと、
d)最終的な衛星ソート物に基づいて、衛星組合せ選択を実行するステップと、
を含む。
obsVar=measVar+estVar

・角度を基礎として、仰角に基づいて、
・幾何学的な形状を基礎として、衛星の各周回軌道に基づいて、
・測定誤差を基礎として、既知の又は予期される測定誤差に基づいて、
3つの異なるフィールドでポイントが付与される。
Claims (8)
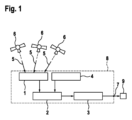
- GNSS受信機(8)において、各GNSS衛星(6)の衛星信号(5)の分散度を考慮して、複数の可視のGNSS衛星(6)から、位置特定を実行するためのGNSS衛星(6)の組合せを選択する方法であって、前記方法は、
a)前記衛星信号(5)の前記分散度を考慮する、予め定められた基準カタログ(15)に従って、少なくとも2つの異なるソートアルゴリズム(11,12,13)を用いて前記複数の可視のGNSS衛星(6)をソートし、各前記予め定められた基準カタログ(15)に従って、低い分散度を有する衛星信号(5)を有するGNSS衛星(6)を求める少なくとも2つの衛星プレソート物(10)を求めるステップであって、各前記衛星プレソート物(10)は、前記複数の可視のGNSS衛星(6)をソートすることにより提供された前記複数の可視のGNSS衛星(6)のリスティングを含む、ステップと、
b)ステップa)において作成された前記衛星プレソート物(10)に重み付けする重み付け関数(17,18)を選択するステップと、
c)重み付された最終的な衛星ソート物(20)が生じるように、各前記重み付け関数(17,18)に従って前記衛星プレソート物(10)を重み付けすることによって最終的な衛星ソート物(20)を作成するステップと、
d)前記最終的な衛星ソート物(20)に基づいて、衛星組合せ選択(21)を実行するステップと、
を含み、
ステップa)において、前記複数の可視のGNSS衛星(6)のうちの任意の第1及び第2のGNSS衛星(6)に関する、前記第1のGNSS衛星(6)と前記GNSS受信機(8)の現在位置との間の第1の方向と、前記第2のGNSS衛星(6)と前記GNSS受信機(8)の現在位置との間の第2の方向との間の角度に基づくソートアルゴリズム(11)に従って少なくとも1つのソートを行い、重み付けを、各前記第1及び第2のGNSS衛星(6)の前記角度に基づく角度パラメータに基づいて行い、
ステップa)において、幾何学的な形状に基づくソートアルゴリズム(12)に従って少なくとも1つのソートを行い、重み付けを、各前記GNSS衛星(6)の周回軌道の幾何学的なパラメータに基づいて行い、
ステップa)において、不正確な測定を伴う前記GNSS衛星(6)を位置特定から除外するために、前記角度に基づくソートアルゴリズム(11)又は前記幾何学的な形状に基づくソートアルゴリズム(12)によって、疑似距離測定のモデル化された分散度を使用する、方法。 - ステップb)において、前記GNSS受信機(8)から前記GNSS衛星(6)への視線ベクトルが基本的に中断され得る複雑な環境が存在する場合に、第1の重み付け関数(17)を選択する、請求項1に記載の方法。
- 前記第1の重み付け関数(17)を用いて、幾何学的な形状に基づくソートアルゴリズム(12)に従って特定された衛星プレソート物(10)を、低減された重み付け係数(19)で考慮する、請求項2に記載の方法。
- ステップb)において、オープンスカイ条件が存在し、前記GNSS受信機(8)から前記GNSS衛星(6)への視線ベクトルが基本的に自由である場合に、第2の重み付け関数(18)を選択する、請求項1乃至3のいずれか一項に記載の方法。
- 前記第2の重み付け関数(18)を用いて、仰角に基づくソートアルゴリズム(11)に従って特定された衛星プレソート物(10)を、低減された重み付け係数(19)で考慮する、請求項4に記載の方法。
- 請求項1乃至5のいずれか一項に記載の方法を実施するように構成されているGNSS受信機(8)。
- 請求項1乃至5のいずれか一項に記載の方法を実施するためのコンピュータプログラム。
- 請求項7に記載のコンピュータプログラムが格納されている電子記憶媒体。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102020206975.1 | 2020-06-04 | ||
| DE102020206975.1A DE102020206975A1 (de) | 2020-06-04 | 2020-06-04 | Verfahren zur Auswahl einer Satellitenkombination für eine Positionsbestimmung |
| PCT/EP2021/064626 WO2021245058A2 (de) | 2020-06-04 | 2021-06-01 | Verfahren zur auswahl einer satellitenkombination für eine positionsbestimmung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023527897A JP2023527897A (ja) | 2023-06-30 |
| JP7581383B2 true JP7581383B2 (ja) | 2024-11-12 |
Family
ID=76325512
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022574169A Active JP7581383B2 (ja) | 2020-06-04 | 2021-06-01 | 位置特定のための衛星組合せを選択する方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230103721A1 (ja) |
| JP (1) | JP7581383B2 (ja) |
| CN (1) | CN115698768A (ja) |
| DE (1) | DE102020206975A1 (ja) |
| WO (1) | WO2021245058A2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117949977B (zh) * | 2023-12-25 | 2024-07-26 | 北京航空航天大学 | 一种gnss转发式无人机诱骗的选星和时延控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008281553A (ja) | 2007-04-09 | 2008-11-20 | Seiko Epson Corp | 現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器 |
| JP2009121971A (ja) | 2007-11-15 | 2009-06-04 | Toyota Motor Corp | 移動体測位装置 |
| JP2012108015A (ja) | 2010-11-18 | 2012-06-07 | Alpine Electronics Inc | 衛星測位装置 |
| WO2017046914A1 (ja) | 2015-09-17 | 2017-03-23 | 三菱電機株式会社 | 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7250904B2 (en) * | 2004-10-08 | 2007-07-31 | Motorola, Inc. | Navigation satellite acquisition in satellite positioning system receiver |
| US7019690B1 (en) * | 2004-10-15 | 2006-03-28 | Telecommunication Systems, Inc. | Culled satellite ephemeris information for quick, accurate assisted locating satellite location determination for cell site antennas |
| CN102401902A (zh) * | 2010-09-08 | 2012-04-04 | 神讯电脑(昆山)有限公司 | 卫星状态判断方法 |
| US20140266912A1 (en) * | 2013-03-15 | 2014-09-18 | Nextnav, Llc | Directional pruning of transmitters to improve position determination |
| JP2014219204A (ja) * | 2013-05-01 | 2014-11-20 | 三菱電機株式会社 | 移動体情報端末 |
| KR102441080B1 (ko) * | 2017-12-04 | 2022-09-06 | 현대자동차주식회사 | 이종 위성군을 이용한 측위 장치 및 그 방법 |
-
2020
- 2020-06-04 DE DE102020206975.1A patent/DE102020206975A1/de active Pending
-
2021
- 2021-06-01 CN CN202180039672.1A patent/CN115698768A/zh active Pending
- 2021-06-01 WO PCT/EP2021/064626 patent/WO2021245058A2/de not_active Ceased
- 2021-06-01 US US17/928,522 patent/US20230103721A1/en active Pending
- 2021-06-01 JP JP2022574169A patent/JP7581383B2/ja active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008281553A (ja) | 2007-04-09 | 2008-11-20 | Seiko Epson Corp | 現在位置測位方法、プログラム、記憶媒体、測位装置及び電子機器 |
| JP2009121971A (ja) | 2007-11-15 | 2009-06-04 | Toyota Motor Corp | 移動体測位装置 |
| JP2012108015A (ja) | 2010-11-18 | 2012-06-07 | Alpine Electronics Inc | 衛星測位装置 |
| WO2017046914A1 (ja) | 2015-09-17 | 2017-03-23 | 三菱電機株式会社 | 測位衛星選択装置、測位装置、測位システム、測位情報発信装置および測位端末 |
Non-Patent Citations (2)
| Title |
|---|
| An-Lin Tao et al.,"Ionospheric correction and satellite selection techniques for medium-range baseline RTK positioning with GPS and QZSS",Proceedings of the 2015 International Technical Meeting of The Institute of Navigation (ITM 2015) ,The Institute of Navigation,2015年01月,pp. 343-352,ISSN:2330-3646 |
| Yun-En Lee et al.,"Combined Algorithm for Satellite Selection for Open-sky and Constrained Environments",Proceedings of the 30th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2017) ,日本,The Institute of Navigation,2017年09月,pp. 3680-3693,DOI:10.33012/2017.15178, ISSN:2331-5911 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN115698768A (zh) | 2023-02-03 |
| JP2023527897A (ja) | 2023-06-30 |
| WO2021245058A3 (de) | 2022-02-10 |
| DE102020206975A1 (de) | 2021-12-09 |
| US20230103721A1 (en) | 2023-04-06 |
| WO2021245058A2 (de) | 2021-12-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11422271B2 (en) | Protection level generation methods and systems for applications using navigation satellite system (NSS) observations | |
| US6259398B1 (en) | Multi-valued variable ambiguity resolution for satellite navigation signal carrier wave path length determination | |
| JP4146877B2 (ja) | 単独測位装置および単独測位方法 | |
| US11781868B2 (en) | System and method for GNSS reflective surface mapping and position fix estimation | |
| EP0679901A2 (en) | Position estimation using satellite range rate measurements | |
| JP2010528321A (ja) | 部分探索搬送波位相整数アンビギュイティ決定 | |
| US11156722B2 (en) | Post-processing global navigation satellite system (GNSS) position data using mirrored GNSS data | |
| CN113376675A (zh) | 一种基于GNSS/视觉/Lidar融合的城市峡谷定位方法 | |
| WO2023236643A1 (zh) | 定位方法、装置、设备及存储介质 | |
| US10514467B2 (en) | Up sampling reference station data | |
| JP7581383B2 (ja) | 位置特定のための衛星組合せを選択する方法 | |
| Ćwian et al. | GNSS-augmented LiDAR SLAM for accurate vehicle localization in large scale urban environments | |
| JP2023169881A (ja) | 都市環境における道路上でのgnss位置特定品質を予測する方法およびシステム | |
| Suzuki | Open-source factor graph optimization package for GNSS: Examples and applications | |
| CN118818571B (zh) | Gnss定位方法、装置、gnss接收机和存储介质 | |
| CN113917509B (zh) | 一种双差模糊度固定方法、设备以及可读存储介质 | |
| CN106707311B (zh) | 基于gps增强的glonass rtk定位方法 | |
| CN117434565A (zh) | 一种基于多接收天线的融合定位方法、装置 | |
| Li et al. | Inertial aided cycle slip detection and repair for PPP/INS tightly coupled navigation | |
| CN115585807A (zh) | 基于机器学习的gnss/ins组合导航方法 | |
| EP3647819B1 (en) | Post-processing global navigation satellite system (gnss) position data using mirrored gnss data | |
| CN119689536B (zh) | 基于信噪比弧段分析的gnss定位方法、系统、终端及介质 | |
| CN120195711B (zh) | 一种基于半紧组合的多频模糊度稳健解算方法、装置、设备及存储介质 | |
| EP4354182A1 (en) | Post-processing of global navigation satellite system (gnss) data | |
| CN118091718B (zh) | 通过低轨卫星下行导航信号改善ut1解算精度的方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221201 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230808 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20231108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240514 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240813 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20241002 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241030 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7581383 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |