JP7576501B2 - 慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 - Google Patents
慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 Download PDFInfo
- Publication number
- JP7576501B2 JP7576501B2 JP2021055326A JP2021055326A JP7576501B2 JP 7576501 B2 JP7576501 B2 JP 7576501B2 JP 2021055326 A JP2021055326 A JP 2021055326A JP 2021055326 A JP2021055326 A JP 2021055326A JP 7576501 B2 JP7576501 B2 JP 7576501B2
- Authority
- JP
- Japan
- Prior art keywords
- aircraft
- inertial navigation
- navigation system
- error correction
- calculated
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
- G01C21/183—Compensation of inertial measurements, e.g. for temperature effects
- G01C21/188—Compensation of inertial measurements, e.g. for temperature effects for accumulated errors, e.g. by coupling inertial systems with absolute positioning systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/10—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration
- G01C21/12—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning
- G01C21/16—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 by using measurements of speed or acceleration executed aboard the object being navigated; Dead reckoning by integrating acceleration or speed, i.e. inertial navigation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C25/00—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass
- G01C25/005—Manufacturing, calibrating, cleaning, or repairing instruments or devices referred to in the other groups of this subclass initial alignment, calibration or starting-up of inertial devices
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Manufacturing & Machinery (AREA)
- Navigation (AREA)
- Traffic Control Systems (AREA)
- Aviation & Aerospace Engineering (AREA)
Description
しかし、GPSによる方法ではジャミングや周りの建築物等の影響を受けやすく、それらの影響を受けない、あるいは受けにくい方法として、慣性航法装置を用いる方法が知られている(特許文献1、2等参照)。
そして、無人航空機の制御部が、算出された位置や姿勢に基づいて自動操縦を行うように構成される。
そして、これは、無人航空機の場合だけでなく、有人の飛行体に搭載された慣性航法装置においても同様に問題になり得る。
搭載した慣性航法装置が算出する位置と姿勢に基づいて自律的に飛行する複数の飛行体における慣性航法装置の誤差補正システムであって、
前記各飛行体はそれぞれ、前記慣性航法装置と、無線通信装置と、自機から見た他機の座標を算出するための座標算出装置と、誤差補正装置と、を搭載しており、
前記誤差補正装置は、
前記座標算出装置が算出した前記自機から見た他機の座標に基づいて自機データに基づく当該他機の方位角及び仰角を算出し、
前記無線通信装置が他機から受信した、当該他機の前記慣性航法装置が算出した当該他機の位置の情報と、自機の前記慣性航法装置が算出した自機の位置の情報に基づいて他機データに基づく当該他機の方位角及び仰角を算出し、
前記自機データに基づく当該他機の方位角及び仰角と、前記他機データに基づく当該他機の方位角及び仰角との差である測角残差に基づいて自機の前記慣性航法装置で生じる誤差を補正することを特徴とする。
搭載した慣性航法装置が算出する位置と姿勢に基づいて自律的に飛行する複数の飛行体における慣性航法装置の誤差補正方法であって、
前記飛行体が自機から見た他機の座標を算出する座標算出工程と、
前記座標算出工程で算出した前記自機から見た他機の座標に基づいて自機データに基づく当該他機の方位角及び仰角を算出する自機データに基づく他機の方位角等算出工程と、
無線通信装置を介して当該他機から受信した、当該他機の前記慣性航法装置が算出した当該他機の位置の情報と、自機の前記慣性航法装置が算出した自機の位置の情報に基づいて他機データに基づく当該他機の方位角及び仰角を算出する他機データに基づく他機の方位角等算出工程と、
前記自機データの基づく当該他機の方位角及び仰角と、前記他機データに基づく当該他機の方位角及び仰角との差である測角残差に基づいて自機の前記慣性航法装置で生じる誤差を補正する誤差補正工程と、
を含むことを特徴とする。
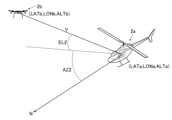
本実施形態に係る慣性航法装置の誤差補正システム1では、図1に示すように、後述する慣性航法装置や無線通信装置等を搭載して自律的に飛行する複数の飛行体2が、互いに無線通信するなどしながら、自らに搭載された慣性航法装置で生じる誤差をそれぞれ補正していくものである。
その際、飛行体2は無人航空機であってもよく、有人機であってもよい。
また、複数の飛行体2は、自機2aと他機2bの2機のみであってもよく、あるいは、3機以上であってもよい。
図2は、各飛行体における慣性航法装置の誤差補正システムに関する構成を表すブロック図である。
各飛行体2はそれぞれ、慣性航法装置10と、無線通信装置11と、座標算出装置12と、誤差補正装置13と、を搭載しており、搭載した慣性航法装置10が算出する位置(緯度、経度、高度)と姿勢(ピッチ、ロール、ヨー)に基づいて自律的に飛行するように構成されている。
また、本実施形態では、各飛行体2にはランプ14が取り付けられており、ランプ14を所定の明滅パターンで明滅させることで、ランプ14の明滅パターンにより自身のID(識別情報)を他の飛行体2(以下、他機という。)に通知するようになっている。
また、慣性航法装置10は、算出した位置や姿勢の情報のうち、位置(緯度、経度、高度)の情報に、自身が搭載されている飛行体2のIDを付与して、無線通信装置11を介して全ての他機に発信するようになっている。
また、無線通信装置11は、他機から発信された、当該他機の慣性航法装置10が算出し、当該他機のIDが付与された当該他機の位置(緯度、経度、高度)の情報を受信すると、当該他機のIDが付与された当該他機の位置の情報を座標算出装置12と誤差補正装置13に送信するようになっている。
座標算出装置12は、自機(すなわち当該座標算出装置12が搭載されている飛行体2)から見た他機の座標(az,el)を算出するための装置である。
以下、本実施形態での座標算出装置12における自機から見た他機の座標(az,el)の算出の仕方について説明する。
また、本実施形態では、カメラ12Aで動画撮影を行う場合について説明するが、静止画を撮影するように構成してもよい。なお、カメラ12Aで静止画を撮影する場合、カメラ12Aで撮影した画像に撮影されている他機のIDを取得するための機構が新たに設けられる。
そして、無線通信装置11が動画中に撮影されている他機から発信された位置の情報(すなわち割り出した当該IDが付与された位置の情報)を受信して座標算出装置12に送信すると、座標算出装置12は、図3に示すように、そのタイミングで撮影された画像(動画を構成する1コマの画像)中の当該他機2bの画像座標(u,v)を割り出す。
すなわち、座標算出装置12は、図3に示すように、画像中の当該他機2bの画像座標(u,v)を座標変換して、自機2aの前方(FWD)、右方(RH)、下方(DWN)を座標軸とする直交座標系における当該他機2bの前方(FWD)軸に対する方位角(az)と仰角(el)を算出するようになっている。
座標算出装置12は、以上の処理を全ての他機2bについて行い、自機2aから見た当該他機2bの座標(az,el)を算出すると、算出した自機2aから見た当該他機2bの座標(az,el)に割り出した当該他機2bのIDを付与してそれぞれ誤差補正装置13に送信する。
次に、本実施形態での誤差補正装置13における自機2aの慣性航法装置10で生じる誤差の補正の仕方について説明する。なお、以下で説明する誤差補正装置13の処理の一部を座標算出装置12等で行うように構成することも可能である。また、座標算出装置12や誤差補正装置13等を1つの装置として構成することも可能である。
また、本実施形態に係る慣性航法装置の誤差補正方法についてもあわせて説明する。
座標算出装置12で自機2aから見た他機2bの座標(az,el)を算出する座標算出工程(ステップS1)については上記の通りである。
誤差補正装置13は、座標算出装置12が算出した自機2aから見た他機2bの座標(az,el)に基づいて自機データに基づく当該他機2bの方位角及び仰角を算出する(自機データに基づく他機の方位角等算出工程(ステップS2))。
この工程では、誤差補正装置13は、座標算出装置12から算出した自機2aから見た他機2bの座標(az,el)の情報が送信されてくると、画像中に撮影されている他機2bから位置の情報を受信したタイミングで自機2aの慣性航法装置10が算出した自機2aの姿勢(ピッチ、ロール、ヨー)の情報を入手する。
しかし、この場合の「他機2bの方位角AZ1や仰角EL1」は、あくまで自機2aの慣性航法装置10が算出した自機2aの姿勢(ピッチp、ロールr、ヨーy)に基づいて算出されたものであり、誤差が含まれている可能性があるため、「自機データに基づく他機の方位角AZ1及び仰角EL1」という。
一方、誤差補正装置13は、無線通信装置11が当該他機2bから受信した、当該他機2bの慣性航法装置10が算出した当該他機2bの位置(緯度、経度、高度)の情報と、無線通信装置11が当該他機2bの位置の情報を受信したタイミングで自機2aの慣性航法装置10が算出した自機2aの位置(緯度、経度、高度)の情報に基づいて、他機データに基づく当該他機2bの方位角及び仰角を算出する(他機データに基づく他機の方位角等算出工程(ステップS3))。
この場合の「他機2bの方位角AZ2や仰角EL2」は、あくまで他機2bの慣性航法装置10が算出した、誤差が含まれている可能性がある他機2bの位置(緯度、経度、高度)に基づいて算出されたものであるため、上記の「自機データに基づく他機の方位角AZ1及び仰角EL1」と区別して「他機データに基づく他機の方位角AZ2及び仰角EL2」という。
続いて、誤差補正装置13は、ステップS2で算出した自機データに基づく他機2bの方位角AZ1及び仰角EL1とステップS3で算出した他機データに基づく当該他機2bの方位角AZ2及び仰角EL2との差である測角残差(ΔAZ,ΔEL)を算出し、算出した測角残差(ΔAZ,ΔEL)に基づいて自機2aの慣性航法装置10で生じる誤差(本実施形態では慣性航法装置10の加速度センサ10Aと角速度センサ10Bの各バイアス誤差)を補正する(誤差補正工程(ステップS4))。
ΔAZ=AZ1-AZ2 …(1)
ΔEL=EL1-EL2 …(2)
を計算して測角残差(ΔAZ,ΔEL)を算出し、算出した測角残差(ΔAZ,ΔEL)に基づいて慣性航法装置10の加速度センサ10Aと角速度センサ10Bの各センサバイアス値をそれぞれ算出する。
そして、慣性航法装置10は、補正された加速度や角速度を積分することで自機2aの位置(緯度、経度、高度)や姿勢(ピッチ、ロール、ヨー)を算出する。
以上のように、本実施形態に係る慣性航法装置の誤差補正システム1や慣性航法装置の誤差補正方法によれば、誤差補正装置13が、座標算出装置12が算出した自機2aから見た他機2bの座標(az,el)に基づいて算出した自機データに基づく当該他機2bの方位角AZ1及び仰角EL1と、自機2aと当該他機2bの各慣性航法装置10がそれぞれ算出した自機2aと当該他機2bの各位置に基づいて算出した他機データに基づく当該他機2bの方位角AZ2及び仰角EL2との差である測角残差(ΔAZ,ΔEL)に基づいて自機2aの慣性航法装置10で生じる誤差を補正するように構成した。
そのため、GPSによる方法ではジャミングや周りの建築物等の影響を受けやすく自機2aの位置(緯度、経度、高度)を特定しにくい状況、またはGPS信号を受信できない状況においても、慣性航法装置10を用いて自機2aの位置(緯度、経度、高度)や姿勢(ピッチ、ロール、ヨー)を算出して自律的に飛行することが可能となる。
なお、上記の実施形態では、全ての他機2b(すなわち無線通信装置11を介して自機2aと通信可能な飛行体2)について算出した全ての測角残差(ΔAZ,ΔEL)を平等に扱って(すなわち例えばそれらの平均値を算出するなどして)自機2aの慣性航法装置10で生じる誤差(慣性航法装置10の加速度センサ10Aや角速度センサ10Bで発生するバイアス誤差等)を補正する場合について説明した。
そこで、以下では、誤差補正の精度を向上させるために上記のフローに追加し得るいくつかの処理等について説明する。
前述したように、各飛行体2(自機2a、他機2b)から、自らに搭載された慣性航法装置10が算出した当該自らの位置(緯度、経度、高度)の情報)が発信されるが、例えば、以下のような場合、当該他機2biから発信される位置の情報は信用できないと考えられる。
具体的には、例えば、当該他機2biについて繰り返し算出される測角残差(ΔAZi,ΔELi)の標準偏差σiは所定の閾値未満でありばらつきが少ないが、ΔAZi、ΔELiの絶対値の一方又は両方が所定の閾値以上に大きい場合。
これは、当該他機2biの慣性航法装置10が故障しているか、あるいは当該他機2bi(又は他者)が故意に誤った情報を発信していると考えられる。
これは、当該他機2biの慣性航法装置10が故障していると考えられる。
疑義信号には、例えば、発信する情報が信用できないと判断した対象の他機2biのIDと、当該疑義信号を発信する自機2aのIDと、疑義の種類(たとえば上記の(A)や(B)など)が含まれる。
このように構成すれば、他機2bの故障した慣性航法装置10が算出した当該他機2bの位置の情報等や、妨害等の目的で故意に誤った情報を発信している他機2bの位置の情報等を、自機2aの慣性航法装置10で生じる誤差の補正に用いないようにすることが可能となり、誤差補正の精度を向上させることが可能となる。
あるいは、当該他機2b(又は他者)がシステムを撹乱する等の目的をもって故意に疑義信号を多発している可能性もある。
この場合、自機2aの誤差補正装置13は、疑義信号を多発する当該他機2b以外の他機2bについて算出した測角残差(ΔAZ,ΔEL)を自機2aの慣性航法装置10で生じる誤差の補正に使用するように使用判定を行うように構成することが可能である。
また、ある他機2bについて算出した測角残差(ΔAZ,ΔEL)を自機2aの慣性航法装置10で生じる誤差の補正に使用するか否かの使用判定に、他の基準を加味するように構成することも可能である。
また、全ての他機2b(すなわち無線通信装置11を介して自機2aと通信可能な飛行体2)について算出した各測角残差(ΔAZ,ΔEL)をそれぞれ重み付けして、自機2aの慣性航法装置10で生じる誤差の補正に用いるように構成することも可能である。
以下、重み付けを行う際に考慮し得るいくつかの要素について説明する。
図7に示すように、例えば2機の他機2bの慣性航法装置10が算出する位置(緯度、経度、高度)の誤差Δ(図7ではイメージ的に上下方向の矢印で示されている。)が同程度である場合、自機2aと他機2bとの距離Lが遠いほど、位置の誤差Δに対応する、自機2aから見た他機2bの方位角や仰角の誤差δは小さくなる。
すなわち、自機2aから他機2bまでの距離Lが近い場合に比べて、自機2aから他機2bまでの距離Lが遠い方が、当該他機2bの慣性航法装置10が算出する位置に多少大きな誤差Δがあっても、自機2aから見た当該他機2bの方位角や仰角に与える影響が小さいため、距離Lが遠い他機2bについて算出した測角残差(ΔAZ,ΔEL)の方が、距離Lが近い他機2bについて算出した測角残差(ΔAZ,ΔEL)よりも精度が高い。
この場合の重みwj、すなわち自機と他機との距離Ljに関する重みwj(Lj)は、例えば、
wj(Lj)=exp(-α/Lj) …(3)
の形とすることができる(αは定数)。
また、本実施形態では、自機2aの誤差補正装置13がある他機2bについて算出した測角残差(ΔAZ,ΔEL)を立体角表現した場合の立体角Ωが設定された閾値以下であり小さい場合、少なくとも当該他機2bに対しては自機2aの慣性航法装置10が算出する位置や姿勢の精度が確定したとして、当該他機2bのIDを含む精度確定信号を発信するようになっている。
精度確定信号には、精度が確定した対象としての当該他機2bのIDのほか、少なくとも当該精度確定信号を発信した自機2aのIDも含まれる。なお、上記の立体角Ωについて設定される閾値を可変とすることも可能であり、例えば、閾値を、自機2aが当該他機2bを初めて認識した時点では大きな値に設定し、誤差の補正処理を繰り返すごとに徐々に小さくしていくように構成することも可能である。
そして、当該他機2bjについて算出した測角残差(ΔAZj,ΔELj)を自機2aの慣性航法装置10で生じる誤差の補正に用いる際の重み付けを重くするように構成すれば、誤差補正の精度を向上させることができる。
この場合の重みwj、すなわち有効測角目標数Njに関する重みwj(Nj)は、例えば、
wj(Nj)=exp(-β/Nj) …(4)
の形とすることができる(βは定数)。
また、上記の疑義信号の所で説明したように、ある他機2biについて算出される測角残差(ΔAZi,ΔELi)の変動(標準偏差σi)は小さいが、測角残差(ΔAZi,ΔELi)自体の大きさが大きい場合(上記(A)参照)は、当該他機2biの慣性航法装置10の故障や当該他機2bi(又は他者)が故意に誤った情報を発信している可能性がある。
しかし、上記のように、ある他機2bjについて算出した測角残差(ΔAZj,ΔELj)を立体角表現した場合の立体角Ωjが閾値以下であり小さく、発信された精度確定信号の対象となっているような他機2bjについては、当該他機2bjの慣性航法装置10の故障や当該他機2bj(又は他者)が故意に誤った情報を発信している可能性はなく、あるいはその可能性は非常に小さい。
この場合の重みwj、すなわち測角残差の標準偏差σjに関する重みwj(σj)は、例えば、
wj(σj)=exp(-γ・σj) …(5)
の形とすることができる(γは定数)。

2 飛行体
2a 自機
2b 他機
10 慣性航法装置
11 無線通信装置
12 座標算出装置
13 誤差補正装置
ALT 高度(位置)
(az,el) 自機から見た他機の座標
AZ1、EL1 自機データに基づく他機の方位角及び仰角
AZ2、EL2 他機データに基づく他機の方位角及び仰角
LAT 緯度(位置)
Lj 自機からの距離
LON 経度(位置)
Nj 有効測角目標数(精度確定信号の数)
p ピッチ(姿勢)
r ロール(姿勢)
V ベクトル
wj 重み
y ヨー(姿勢)
(ΔAZ,ΔEL) 測角残差
σj 測角残差の標準偏差(測角残差の変動)
Ω 立体角
Claims (7)
- 搭載した慣性航法装置が算出する位置と姿勢に基づいて自律的に飛行する複数の飛行体における慣性航法装置の誤差補正システムであって、
前記各飛行体はそれぞれ、前記慣性航法装置と、無線通信装置と、自機から見た他機の座標を算出するための座標算出装置と、誤差補正装置と、を搭載しており、
前記誤差補正装置は、
前記座標算出装置が算出した前記自機から見た他機の座標に基づいて自機データに基づく当該他機の方位角及び仰角を算出し、
前記無線通信装置が他機から受信した、当該他機の前記慣性航法装置が算出した当該他機の位置の情報と、自機の前記慣性航法装置が算出した自機の位置の情報に基づいて他機データに基づく当該他機の方位角及び仰角を算出し、
前記自機データに基づく当該他機の方位角及び仰角と、前記他機データに基づく当該他機の方位角及び仰角との差である測角残差に基づいて自機の前記慣性航法装置で生じる誤差を補正することを特徴とする慣性航法装置の誤差補正システム。 - 前記誤差補正装置は、前記座標算出装置が算出した前記自機から見た他機の座標と、自機の前記慣性航法装置が算出した自機の前記姿勢の情報に基づいて前記自機データに基づく他機の方位角及び仰角を算出することを特徴とする請求項1に記載の慣性航法装置の誤差補正システム。
- 前記誤差補正装置は、前記自機の前記慣性航法装置が算出した自機の位置から前記他機の慣性航法装置が算出した当該他機の位置に向かうベクトルの方位角及び仰角を前記他機データに基づく当該他機の方位角及び仰角として算出することを特徴とする請求項1又は請求項2に記載の慣性航法装置の誤差補正システム。
- 前記誤差補正装置は、ある他機から受信した、当該他機の前記慣性航法装置が算出した当該他機の位置の情報が信用できないと判断した場合は、当該他機を含む他機に対して、当該他機の位置の情報が信用できない旨を表す信号を発信することを特徴とする請求項1から請求項3のいずれか一項に記載の慣性航法装置の誤差補正システム。
- 前記誤差補正装置は、自機からの距離が遠い他機ほど重みが大きくなるように前記測角残差を重み付けして、前記測角残差に基づいて自機の前記慣性航法装置で生じる誤差を補正することを特徴とする請求項1から請求項4のいずれか一項に記載の慣性航法装置の誤差補正システム。
- 前記誤差補正装置は、ある他機について算出した前記測角残差を立体角表現した場合の立体角が閾値以下である場合、当該他機の識別情報を含む精度確定信号を発信することを特徴とする請求項1から請求項5のいずれか一項に記載の慣性航法装置の誤差補正システム。
- 搭載した慣性航法装置が算出する位置と姿勢に基づいて自律的に飛行する複数の飛行体における慣性航法装置の誤差補正方法であって、
前記飛行体が自機から見た他機の座標を算出する座標算出工程と、
前記座標算出工程で算出した前記自機から見た他機の座標に基づいて自機データに基づく当該他機の方位角及び仰角を算出する自機データに基づく他機の方位角等算出工程と、
無線通信装置を介して当該他機から受信した、当該他機の前記慣性航法装置が算出した当該他機の位置の情報と、自機の前記慣性航法装置が算出した自機の位置の情報に基づいて他機データに基づく当該他機の方位角及び仰角を算出する他機データに基づく他機の方位角等算出工程と、
前記自機データの基づく当該他機の方位角及び仰角と、前記他機データに基づく当該他機の方位角及び仰角との差である測角残差に基づいて自機の前記慣性航法装置で生じる誤差を補正する誤差補正工程と、
を含むことを特徴とする慣性航法装置の誤差補正方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021055326A JP7576501B2 (ja) | 2021-03-29 | 2021-03-29 | 慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 |
| US17/691,405 US12055394B2 (en) | 2021-03-29 | 2022-03-10 | Inertial navigation device error correction system and inertial navigation device error correction method |
| DE102022106260.0A DE102022106260A1 (de) | 2021-03-29 | 2022-03-17 | Fehlerkorrektursystem und fehlerkorrekturverfahren für trägheitsnavigationsgeräte |
| CN202210263702.3A CN115143992A (zh) | 2021-03-29 | 2022-03-17 | 惯性导航装置的误差校正系统及其误差校正方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021055326A JP7576501B2 (ja) | 2021-03-29 | 2021-03-29 | 慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022152525A JP2022152525A (ja) | 2022-10-12 |
| JP7576501B2 true JP7576501B2 (ja) | 2024-10-31 |
Family
ID=83192856
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021055326A Active JP7576501B2 (ja) | 2021-03-29 | 2021-03-29 | 慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12055394B2 (ja) |
| JP (1) | JP7576501B2 (ja) |
| CN (1) | CN115143992A (ja) |
| DE (1) | DE102022106260A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7759061B2 (ja) * | 2023-07-21 | 2025-10-23 | 学校法人福岡工業大学 | 飛行体の位置推定システム、及び飛行体の位置推定方法 |
| CN117606430A (zh) * | 2023-11-26 | 2024-02-27 | 北京控制与电子技术研究所 | 一种基于深度相机测量的方位传递方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020063968A (ja) | 2018-10-17 | 2020-04-23 | 株式会社Subaru | 航空機の位置計測システム、航空機の位置計測方法及び航空機 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10608741B2 (en) * | 2018-05-29 | 2020-03-31 | 4S-Silversword Software And Services, Llc | Through the air link optical component |
| JP6962812B2 (ja) | 2017-12-26 | 2021-11-05 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co., Ltd | 情報処理装置、飛行制御指示方法、プログラム、及び記録媒体 |
| JP7273546B2 (ja) | 2019-03-12 | 2023-05-15 | 株式会社Subaru | 航空機 |
-
2021
- 2021-03-29 JP JP2021055326A patent/JP7576501B2/ja active Active
-
2022
- 2022-03-10 US US17/691,405 patent/US12055394B2/en active Active
- 2022-03-17 CN CN202210263702.3A patent/CN115143992A/zh active Pending
- 2022-03-17 DE DE102022106260.0A patent/DE102022106260A1/de active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020063968A (ja) | 2018-10-17 | 2020-04-23 | 株式会社Subaru | 航空機の位置計測システム、航空機の位置計測方法及び航空機 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102022106260A1 (de) | 2022-09-29 |
| US20220307837A1 (en) | 2022-09-29 |
| JP2022152525A (ja) | 2022-10-12 |
| US12055394B2 (en) | 2024-08-06 |
| CN115143992A (zh) | 2022-10-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101326889B1 (ko) | 이동 기준국을 이용한 차량간 상대 위치 제어 방법 및 그 시스템 | |
| US9767372B2 (en) | Target detection apparatus and target detection method | |
| CN108333610B (zh) | V2v协作相对定位系统 | |
| US12405112B2 (en) | Inertial navigation system capable of dead reckoning in vehicles | |
| US9188979B2 (en) | Method and system for remotely controlling a vehicle | |
| EP2848963B1 (en) | Method and apparatus for calculating status, and movable body | |
| US20190196474A1 (en) | Control method, control apparatus, control device, and movable platform | |
| US11215714B2 (en) | Deceiving signal detection system and deceiving signal detection method | |
| KR101962398B1 (ko) | 레이더의 표적 정보 오차 보상 방법 및 장치 | |
| CN108693543A (zh) | 用于检测信号欺骗的方法及系统 | |
| JP2001502802A (ja) | Gps/irsグローバル位置決定方法およびインテグリティ損失の対策を講じた装置 | |
| JP7576501B2 (ja) | 慣性航法装置の誤差補正システム及び慣性航法装置の誤差補正方法 | |
| JP2003509697A (ja) | 地上増強された衛星航法システム用の解分離方法および装置 | |
| CN119270908B (zh) | 基于惯性制导的无人机定点投放控制系统及方法 | |
| JP2008241320A (ja) | 飛しょう体及び飛しょう体に搭載される慣性装置の調定方法 | |
| US20250109943A1 (en) | Position measurement apparatus, position measurement method, program, and storage device | |
| KR102238628B1 (ko) | 전파간섭환경에서 uav를 활용한 선박 백업 항법 시스템 및 그 방법 | |
| JP6901584B2 (ja) | 移動体の姿勢センサ装置 | |
| CN108761420A (zh) | 一种基于mems的船用固态导航雷达目标检测的补偿方法 | |
| US12092726B2 (en) | Methods and systems for millimeter wave assisted vehicle navigation | |
| US20170010348A1 (en) | Producing data describing target measurements | |
| JP6644205B2 (ja) | 通信装置、制御方法、及び制御プログラム | |
| JP2015193347A (ja) | 飛翔体の慣性航法システム | |
| US20250290753A1 (en) | Method and system for determining an inferred location of a device and spoof detection | |
| US20210081037A1 (en) | Large Area Tracker with Milliwave Boresight Capability |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20240201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240924 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20241021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7576501 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |