JP7557560B2 - 撮影システムおよび画像融合方法 - Google Patents
撮影システムおよび画像融合方法 Download PDFInfo
- Publication number
- JP7557560B2 JP7557560B2 JP2023022643A JP2023022643A JP7557560B2 JP 7557560 B2 JP7557560 B2 JP 7557560B2 JP 2023022643 A JP2023022643 A JP 2023022643A JP 2023022643 A JP2023022643 A JP 2023022643A JP 7557560 B2 JP7557560 B2 JP 7557560B2
- Authority
- JP
- Japan
- Prior art keywords
- objects
- sub
- images
- image
- scene
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/50—Image enhancement or restoration using two or more images, e.g. averaging or subtraction
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T3/00—Geometric image transformations in the plane of the image
- G06T3/40—Scaling of whole images or parts thereof, e.g. expanding or contracting
- G06T3/4038—Image mosaicing, e.g. composing plane images from plane sub-images
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20016—Hierarchical, coarse-to-fine, multiscale or multiresolution image processing; Pyramid transform
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20048—Transform domain processing
- G06T2207/20064—Wavelet transform [DWT]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20212—Image combination
- G06T2207/20221—Image fusion; Image merging
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/10—Image acquisition
- G06V10/16—Image acquisition using multiple overlapping images; Image stitching
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/90—Arrangement of cameras or camera modules, e.g. multiple cameras in TV studios or sports stadiums
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
- Two-Way Televisions, Distribution Of Moving Picture Or The Like (AREA)
- Lining Or Joining Of Plastics Or The Like (AREA)
Description
200 コントローラ
BB1、BG、BS1、C1、C2、C3、C4、H1、H2、H3、H4、H5、H 6、H7、H8、O1、O2 オブジェクト
S 情景
SI サブ画像
S100、S200、S300、S320、S340、S400、S420、S440、S500、S520、S540、S522、S524、S526 ステップ
Claims (5)
- 情景を撮影して、複数のサブ画像を生成する複数のカメラと、
前記カメラに信号接続され、前記サブ画像を取得するコントローラと、
を含み、
前記コントローラが、前記サブ画像を分析して、前記情景に含まれる複数のオブジェクトを取得するとともに、
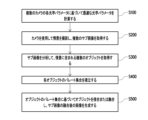
前記コントローラが、各前記オブジェクトのパレート集合を確立し、各前記オブジェクトの前記パレート集合に基づいて前記オブジェクトを接合し、前記サブ画像の融合後の画像を生成し、
各前記オブジェクトが、サブオブジェクトを含み、前記サブオブジェクトが、各前記オブジェクトが前記サブ画像のうちの1つに出現する画像範囲であり、
前記コントローラが、前記カメラの各光学パラメータに基づいて最適化された光学パラメータを計算し、
前記コントローラが、前記情景の各前記オブジェクトから異なるサブ画像中の各前記オブジェクトに含まれる全ての前記サブオブジェクトに対応する画像フィードバックパラメータを収集するとともに、前記画像フィードバックパラメータおよび前記サブオブジェクトに対応する前記最適化された光学パラメータに基づいて、多目的シミュレーテッドアニーリングアルゴリズムを使用して各前記オブジェクトの前記パレート集合を確立する撮影システム。 - 前記コントローラが、パノプティックセグメンテーションアルゴリズムを使用して前記サブ画像を分析し、各前記サブ画像に含まれる前記オブジェクトおよびそれらの境界を取得するとともに、前記情景に含まれる前記オブジェクトのオブジェクトタイプに基づいて前記オブジェクトに番号を付け、前記情景に含まれる前記オブジェクトを取得する請求項1に記載の撮影システム。
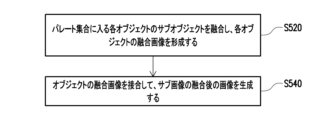
- 前記コントローラが、前記パレート集合に入る各前記オブジェクトの前記サブオブジェクトを融合し、前記オブジェクトの複数の融合画像を形成するとともに、前記オブジェクトの前記融合画像を接合して、前記サブ画像の融合後の前記画像を生成する請求項2に記載の撮影システム。
- 前記コントローラが、非剛性アライメントアルゴリズムを使用して、前記パレート集合に入る前記サブオブジェクトに基づいてアライメント基準を確立した後、各前記オブジェクトのオブジェクトタイプに基づいて融合方法を選択するとともに、前記アライメント基準および前記融合方法に基づいて前記パレート集合に入る各前記オブジェクトの前記サブオブジェクトを融合する請求項3に記載の撮影システム。
- 複数のカメラの各光学パラメータに基づいて最適化された光学パラメータを計算するステップと、
前記カメラを使用して情景を撮影し、複数のサブ画像を取得するステップと、
前記サブ画像を分析して、前記情景に含まれる複数のオブジェクトを取得するステップと、
各前記オブジェクトのパレート集合を確立するステップと、
各前記オブジェクトの前記パレート集合に基づいて前記オブジェクトを接合し、前記サブ画像の融合後の画像を生成するステップと、
を含み、
各前記オブジェクトが、サブオブジェクトを含み、前記サブオブジェクトが、各前記オブジェクトが前記サブ画像のうちの1つに出現する画像範囲であり、各前記オブジェクトのパレート集合を確立するステップが、
前記情景の各前記オブジェクトから異なるサブ画像中の各前記オブジェクトに含まれる全ての前記サブオブジェクトに対応する画像フィードバックパラメータを収集することと、
前記画像フィードバックパラメータおよび前記サブオブジェクトに対応する前記最適化された光学パラメータに基づいて、多目的シミュレーテッドアニーリングアルゴリズムを使用して各前記オブジェクトの前記パレート集合を確立することと、を含む画像融合方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW111131061 | 2022-08-18 | ||
| TW111131061A TWI819752B (zh) | 2022-08-18 | 2022-08-18 | 拍攝系統及影像融合的方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2024028090A JP2024028090A (ja) | 2024-03-01 |
| JP7557560B2 true JP7557560B2 (ja) | 2024-09-27 |
Family
ID=84568798
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023022643A Active JP7557560B2 (ja) | 2022-08-18 | 2023-02-16 | 撮影システムおよび画像融合方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20240062339A1 (ja) |
| EP (1) | EP4325428B1 (ja) |
| JP (1) | JP7557560B2 (ja) |
| CN (1) | CN117676301A (ja) |
| TW (1) | TWI819752B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118429784B (zh) * | 2024-07-02 | 2024-10-01 | 深圳市华方信息产业有限公司 | 协同式图像处理方法、装置、设备及存储介质 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220237813A1 (en) | 2021-01-28 | 2022-07-28 | Qualcomm Incorporated | Image fusion for scenes with objects at multiple depths |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8411938B2 (en) * | 2007-11-29 | 2013-04-02 | Sri International | Multi-scale multi-camera adaptive fusion with contrast normalization |
| WO2017079657A1 (en) * | 2015-11-04 | 2017-05-11 | Intel Corporation | Use of temporal motion vectors for 3d reconstruction |
| US20190122082A1 (en) * | 2017-10-23 | 2019-04-25 | Motionloft, Inc. | Intelligent content displays |
| US11676284B2 (en) * | 2019-03-22 | 2023-06-13 | Nvidia Corporation | Shape fusion for image analysis |
| US11210769B2 (en) * | 2019-05-03 | 2021-12-28 | Amazon Technologies, Inc. | Video enhancement using a recurrent image date of a neural network |
| US20210027439A1 (en) * | 2019-07-22 | 2021-01-28 | Qualcomm Incorporated | Orientation adjustment of objects in images |
| CN112995467A (zh) * | 2021-02-05 | 2021-06-18 | 深圳传音控股股份有限公司 | 图像处理方法、移动终端及存储介质 |
-
2022
- 2022-08-18 TW TW111131061A patent/TWI819752B/zh active
- 2022-09-09 CN CN202211103415.2A patent/CN117676301A/zh active Pending
- 2022-11-23 US US17/992,943 patent/US20240062339A1/en active Pending
- 2022-12-22 EP EP22215780.2A patent/EP4325428B1/en active Active
-
2023
- 2023-02-16 JP JP2023022643A patent/JP7557560B2/ja active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220237813A1 (en) | 2021-01-28 | 2022-07-28 | Qualcomm Incorporated | Image fusion for scenes with objects at multiple depths |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2024028090A (ja) | 2024-03-01 |
| TWI819752B (zh) | 2023-10-21 |
| EP4325428B1 (en) | 2025-08-13 |
| US20240062339A1 (en) | 2024-02-22 |
| CN117676301A (zh) | 2024-03-08 |
| EP4325428A1 (en) | 2024-02-21 |
| EP4325428C0 (en) | 2025-08-13 |
| TW202410683A (zh) | 2024-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| TWI899424B (zh) | 用於針對具有多個深度處的目標的場景的影像融合的方法、設備,和非暫時性電腦可讀取媒體 | |
| US9883125B2 (en) | Imaging systems and methods for generating motion-compensated high-dynamic-range images | |
| US10009540B2 (en) | Image processing device, image capturing device, and image processing method for setting a combination parameter for combining a plurality of image data | |
| JP2020039130A (ja) | 撮像装置 | |
| CN101690160B (zh) | 用于使用自动聚焦统计的运动检测的方法、系统及设备 | |
| CN107205109A (zh) | 具有多摄像模块的电子装置及其控制的方法 | |
| WO2017170716A1 (ja) | 撮像装置、画像処理装置、および電子機器 | |
| US11593958B2 (en) | Imaging device, distance measurement method, distance measurement program, and recording medium | |
| CN104243804B (zh) | 摄像设备、图像处理设备及其控制方法 | |
| JP7557560B2 (ja) | 撮影システムおよび画像融合方法 | |
| JPWO2017057492A1 (ja) | 撮像装置および画像処理装置 | |
| CN115314697A (zh) | 图像处理设备和方法、摄像设备及其控制方法和存储介质 | |
| WO2007043325A1 (ja) | 画像処理システム、画像処理プログラム | |
| JP5332493B2 (ja) | カメラ、画像共有サーバ及び画像共有プログラム | |
| JP5359930B2 (ja) | 撮像装置、表示方法、および、プログラム | |
| JP6900577B2 (ja) | 画像処理装置及びプログラム | |
| JP7191680B2 (ja) | 画像処理装置および撮像装置 | |
| WO2017170717A1 (ja) | 撮像装置、焦点調節装置、および電子機器 | |
| JP2017182668A (ja) | データ処理装置、撮像装置、及びデータ処理方法 | |
| CN114202488A (zh) | 一种图像融合方法及装置 | |
| JP2024176038A (ja) | 信号処理装置、信号処理方法 | |
| JP2016095229A (ja) | 視差値導出装置、移動体、ロボット、視差値生産方法、及びプログラム | |
| JP2018050231A (ja) | 撮像装置、撮像方法および撮像制御プログラム | |
| WO2017170719A1 (ja) | 撮像装置、および電子機器 | |
| CN102387301A (zh) | 成像设备和成像方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230216 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240501 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240705 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240913 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7557560 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |