JP7553176B2 - ハードウェアアクセラレータをスケジューリングするための方法およびタスクスケジューラ - Google Patents
ハードウェアアクセラレータをスケジューリングするための方法およびタスクスケジューラ Download PDFInfo
- Publication number
- JP7553176B2 JP7553176B2 JP2022559487A JP2022559487A JP7553176B2 JP 7553176 B2 JP7553176 B2 JP 7553176B2 JP 2022559487 A JP2022559487 A JP 2022559487A JP 2022559487 A JP2022559487 A JP 2022559487A JP 7553176 B2 JP7553176 B2 JP 7553176B2
- Authority
- JP
- Japan
- Prior art keywords
- task
- hardware accelerator
- executed
- target
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images












Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/50—Allocation of resources, e.g. of the central processing unit [CPU]
- G06F9/5005—Allocation of resources, e.g. of the central processing unit [CPU] to service a request
- G06F9/5027—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals
- G06F9/5038—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals considering the execution order of a plurality of tasks, e.g. taking priority or time dependency constraints into consideration
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/48—Program initiating; Program switching, e.g. by interrupt
- G06F9/4806—Task transfer initiation or dispatching
- G06F9/4843—Task transfer initiation or dispatching by program, e.g. task dispatcher, supervisor, operating system
- G06F9/4881—Scheduling strategies for dispatcher, e.g. round robin, multi-level priority queues
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/50—Allocation of resources, e.g. of the central processing unit [CPU]
- G06F9/5005—Allocation of resources, e.g. of the central processing unit [CPU] to service a request
- G06F9/5027—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals
- G06F9/5044—Allocation of resources, e.g. of the central processing unit [CPU] to service a request the resource being a machine, e.g. CPUs, Servers, Terminals considering hardware capabilities
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/50—Allocation of resources, e.g. of the central processing unit [CPU]
- G06F9/5061—Partitioning or combining of resources
- G06F9/5066—Algorithms for mapping a plurality of inter-dependent sub-tasks onto a plurality of physical CPUs
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/54—Interprogram communication
- G06F9/545—Interprogram communication where tasks reside in different layers, e.g. user- and kernel-space
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2209/00—Indexing scheme relating to G06F9/00
- G06F2209/48—Indexing scheme relating to G06F9/48
- G06F2209/484—Precedence
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2209/00—Indexing scheme relating to G06F9/00
- G06F2209/50—Indexing scheme relating to G06F9/50
- G06F2209/5017—Task decomposition
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F2209/00—Indexing scheme relating to G06F9/00
- G06F2209/50—Indexing scheme relating to G06F9/50
- G06F2209/509—Offload
Landscapes
- Engineering & Computer Science (AREA)
- Software Systems (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Advance Control (AREA)
- Programmable Controllers (AREA)
Description


(1つまたは複数であり得る)をスケジューリングする。本出願のこの実施形態では、タスクスケジューラがCPUと各ハードウェアアクセラレータとの間に接続される。タスクスケジューラは、ハードウェアスケジューリングを介して、タスク間の依存関係に基づいて、各タスクを実行するようHACをスケジューリングするように構成される。各タスクの配信は、直接ハードウェアアクセスによって実行される。これは、タスクの配信の遅延を短縮し、間接的にシステムの処理性能を向上させる。
Claims (13)
- ハードウェアアクセラレータをスケジューリングするための方法であって:
タスクスケジューラによって、ターゲットタスクを取得するステップと;
依存関係に基づいて前記タスクスケジューラによって、前記ターゲットタスクに関連付けられた第1の関連付けられたタスクを決定するステップであって、前記依存関係は、タスクセット内のタスクの実行順序を示し、前記ターゲットタスクは前記タスクセット内のタスクであり、前記第1の関連付けられたタスクは前記ターゲットタスクが実行される前に前記依存関係に基づいて実行される必要があるタスクである、ステップと;
前記第1の関連付けられたタスクが実行されたと前記タスクスケジューラが決定するとき、前記タスクスケジューラによって、前記ターゲットタスクを実行するように少なくとも1つのハードウェアアクセラレータをスケジューリングするステップと;
前記タスクスケジューラによって、前記タスクセット内の各タスクが実行された後に取得されたデータを格納するステップであって、前記タスクセット内のすべてのタスクがスケジューリングされたタスクを形成する、ステップと;を含み、
前記タスクセット内の前記タスクを形成するデータは、車両によって、前記車両に搭載されたカメラ装置を使用することによって取得され、
前記タスクセット内の各タスクが実行された後に取得された前記データはAIモジュールによって計算されるフィードバックデータを含み、前記フィードバックデータは、車線境界線および/または停止線を感知するために使用されるデータ;または安全領域を感知するために使用されるデータ;または障害物を感知するために使用されるデータ;を含み、前記フィードバックデータは、前記車両の操作を案内するために使用され、前記AIモジュールは前記少なくとも1つのハードウェアアクセラレータに属する、
方法。 - 前記タスクスケジューラが、前記ターゲットタスクを実行するように前記少なくとも1つのハードウェアアクセラレータをスケジューリングするとき、前記少なくとも1つのハードウェアアクセラレータは前記ターゲットタスクを順に実行する、
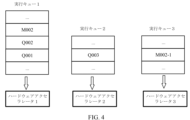
請求項1に記載の方法。 - 前記少なくとも1つのハードウェアアクセラレータのそれぞれは実行キューに対応し、前記ターゲットタスクの識別子が各前記ハードウェアアクセラレータに対応する前記実行キューに格納される、
請求項1又は2に記載の方法。 - 前記タスクスケジューラが前記ターゲットタスクを実行するように前記少なくとも1つのハードウェアアクセラレータをスケジューリングした後、前記方法はさらに:
前記タスクスケジューラによって、前記少なくとも1つのハードウェアアクセラレータによって返された指示メッセージを受信するステップであって、前記指示メッセージは、前記少なくとも1つのハードウェアアクセラレータが前記ターゲットタスクを実行したことを示す、ステップと;
前記タスクスケジューラによって、前記少なくとも1つのハードウェアアクセラレータに対応する実行キューから前記ターゲットタスクの前記識別子を削除するステップと;を含む、
請求項3に記載の方法。 - ターゲットタスクを取得するように構成された取得モジュールと;
依存関係に基づいて、前記ターゲットタスクに関連付けられた第1の関連付けられたタスクを決定するように構成された決定モジュールであって、前記依存関係はタスクセット内のタスクの実行順序を示し、前記ターゲットタスクは前記タスクセット内のタスクであり、前記第1の関連付けられたタスクは前記ターゲットタスクが実行される前に前記依存関係に基づいて実行される必要があるタスクである、決定モジュールと;
スケジューリングモジュールであって:前記決定モジュールが前記第1の関連付けられたタスクが実行されたと決定するときに、前記ターゲットタスクを実行するよう少なくとも1つのハードウェアアクセラレータをスケジューリングするように構成された、スケジューリングモジュールと;を有し、
前記スケジューリングモジュールは、さらに:前記タスクセット内の各タスクが実行された後に取得されたデータを格納するように構成される、前記タスクセット内のすべてのタスクがスケジューリングされたタスクを形成し、
前記タスクセット内の前記タスクを形成するデータは、車両によって、前記車両に搭載されたカメラ装置を使用することによって取得され、
前記タスクセット内の各タスクが実行された後に取得された前記データはAIモジュールによって計算されるフィードバックデータを含み、前記フィードバックデータは:車線境界線および/または停止線を感知するために使用されるデータ;または安全領域を感知するために使用されるデータ;または障害物を感知するために使用されるデータ;を含み、前記フィードバックデータは、前記車両の操作を案内するために使用され、前記AIモジュールは前記少なくとも1つのハードウェアアクセラレータに属する、
タスクスケジューラ。 - 前記スケジューリングモジュールが、前記ターゲットタスクを実行するように前記少なくとも1つのハードウェアアクセラレータをスケジューリングするとき、前記少なくとも1つのハードウェアアクセラレータは前記ターゲットタスクを順に実行する、
請求項5に記載のスケジューラ。 - 前記少なくとも1つのハードウェアアクセラレータのそれぞれが実行キューに対応し、前記ターゲットタスクの識別子が各前記ハードウェアアクセラレータに対応する前記実行キューに格納される、
請求項5又は6に記載のスケジューラ。 - 前記スケジューリングモジュールは、さらに:
前記スケジューリングモジュールが前記ターゲットタスクを実行するように前記少なくとも1つのハードウェアアクセラレータをスケジューリングした後、前記少なくとも1つのハードウェアアクセラレータによって返された指示メッセージを受信し、前記指示メッセージは、前記少なくとも1つのハードウェアアクセラレータが前記ターゲットタスクを実行したことを示し;
前記少なくとも1つのハードウェアアクセラレータに対応する実行キューから、前記ターゲットタスクの前記識別子を削除する;ように構成される、
請求項7に記載のスケジューラ。 - タスクスケジューラであって、ターゲットタスクを取得し、依存関係に基づいて、前記ターゲットタスクに関連付けられた第1の関連付けられたタスクを決定し、前記依存関係はタスクセット内のタスクの実行順序を示し、前記ターゲットタスクは前記タスクセット内のタスクであり、前記第1の関連付けられたタスクは前記ターゲットタスクが実行される前に前記依存関係に基づいて実行される必要があるタスクであり;前記第1の関連付けられたタスクが実行されたと決定されるとき、前記ターゲットタスクを実行するように少なくとも1つのハードウェアアクセラレータをスケジューリングする、ように構成される、タスクスケジューラと;
前記ターゲットタスクを実行するように構成された前記少なくとも1つのハードウェアアクセラレータと;を有し、
前記タスクスケジューラはさらに:前記タスクセット内の各タスクが実行された後に取得されたデータを格納するように構成され、前記タスクセット内のすべてのタスクがスケジューリングされたタスクを形成し、
前記タスクセット内の前記タスクを形成するデータは、車両によって、前記車両に搭載されたカメラ装置を使用することによって取得され、
前記タスクセット内の各タスクが実行された後に取得された前記データはAIモジュールによって計算されるフィードバックデータを含み、前記フィードバックデータは:車線境界線および/または停止線を感知するために使用されるデータ;または安全領域を感知するために使用されるデータ;または障害物を感知するために使用されるデータ;を含み、前記フィードバックデータは前記車両の操作を案内するために使用され、前記AIモジュールは前記少なくとも1つのハードウェアアクセラレータに属する、
制御システム。 - 前記タスクスケジューラは少なくとも1つの実行キューを含み、前記ターゲットタスクの識別子が各実行キューに格納され;
前記少なくとも1つのハードウェアアクセラレータは、前記ターゲットタスクのものであって、前記少なくとも1つの実行キューに格納されている識別子を使用することによって前記ターゲットタスクを実行するように構成され、各ハードウェアアクセラレータは1つの実行キューに対応する、
請求項9に記載のシステム。 - プロセッサおよびメモリを有するタスクスケジューラであって、前記プロセッサは前記メモリに結合され;
前記メモリはプログラムを格納するように構成され;
前記プロセッサは、前記タスクスケジューラが請求項1乃至4のいずれか1項に記載の方法を実行するように、前記メモリ内の前記プログラムを実行するように構成される、
タスクスケジューラ。 - プログラムを含むコンピュータ可読記憶媒体であって、前記プログラムがコンピュータで実行されるとき、前記コンピュータは請求項1乃至4のいずれか1項に記載の方法を実行することを可能にされる、コンピュータ可読記憶媒体。
- コンピュータプログラムであって、前記コンピュータプログラムがコンピュータで実行されるとき、前記コンピュータは、請求項1乃至4のいずれか1項に記載の方法を実行することを可能にされる、コンピュータプログラム。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2020/082395 WO2021195949A1 (zh) | 2020-03-31 | 2020-03-31 | 一种调度硬件加速器的方法及任务调度器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023519405A JP2023519405A (ja) | 2023-05-10 |
| JP7553176B2 true JP7553176B2 (ja) | 2024-09-18 |
Family
ID=77927846
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2022559487A Active JP7553176B2 (ja) | 2020-03-31 | 2020-03-31 | ハードウェアアクセラレータをスケジューリングするための方法およびタスクスケジューラ |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230022294A1 (ja) |
| EP (1) | EP4120077A4 (ja) |
| JP (1) | JP7553176B2 (ja) |
| CN (1) | CN114981776A (ja) |
| WO (1) | WO2021195949A1 (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113867855B (zh) * | 2020-06-30 | 2025-02-21 | 华为技术有限公司 | 一种任务推送方法、装置和电子设备 |
| CN114996205B (zh) * | 2022-07-21 | 2022-12-06 | 之江实验室 | 辅助3d架构近存计算系统的片内数据调度控制器及方法 |
| DE102022126913A1 (de) | 2022-10-14 | 2024-04-25 | Connaught Electronics Ltd. | Computerimplementiertes Verfahren zum parallelen Ausführen von Softwareapplikationen unter Verwendung einer Verarbeitungsvorrichtung, die einen Hardware-Rechencluster enthält, und Verarbeitungsvorrichtung |
| CN117951064A (zh) * | 2022-10-31 | 2024-04-30 | 华为技术有限公司 | 一种芯片系统和集合通信方法 |
| CN115794339A (zh) * | 2022-11-21 | 2023-03-14 | 贵州电网有限责任公司 | 云计算任务跟踪处理方法及系统 |
| CN116500896B (zh) * | 2023-04-28 | 2024-03-15 | 重庆大学 | 智能网联汽车域控制器多虚拟cpu任务智能实时调度模型和方法 |
| CN116416116A (zh) * | 2023-05-08 | 2023-07-11 | 北京地平线信息技术有限公司 | 通过人工智能加速器对图像进行处理的方法、装置和芯片 |
| EP4468150A1 (en) * | 2023-05-24 | 2024-11-27 | Beijing Horizon Information Technology Co., Ltd. | Soc-based task scheduling method, soc, and electronic device |
| CN120256078A (zh) * | 2024-01-03 | 2025-07-04 | 华为技术有限公司 | 一种任务处理装置、相关晶粒及处理方法 |
| CN119917291B (zh) * | 2025-04-02 | 2025-07-29 | 合肥康芯威存储技术有限公司 | 一种存储器及任务处理方法 |
| CN120011093B (zh) * | 2025-04-22 | 2025-08-08 | 中昊芯英(杭州)科技有限公司 | 面向加速器的多任务处理方法以及相关装置 |
| CN120560867B (zh) * | 2025-07-31 | 2025-09-30 | 苏州元脑智能科技有限公司 | 推理任务处理方法、装置、电子设备及存储介质 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009069921A (ja) | 2007-09-11 | 2009-04-02 | Hitachi Ltd | マルチプロセッサシステム |
| JP2009093218A (ja) | 2007-10-03 | 2009-04-30 | Fuji Xerox Co Ltd | 画像処理装置及びプログラム |
| WO2017131187A1 (ja) | 2016-01-29 | 2017-08-03 | 日本電気株式会社 | アクセラレータ制御装置、アクセラレータ制御方法およびプログラム |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6427161B1 (en) * | 1998-06-12 | 2002-07-30 | International Business Machines Corporation | Thread scheduling techniques for multithreaded servers |
| US7430652B2 (en) * | 2003-03-28 | 2008-09-30 | Tarari, Inc. | Devices for performing multiple independent hardware acceleration operations and methods for performing same |
| EP2751684A4 (en) * | 2011-09-02 | 2015-07-08 | Freescale Semiconductor Inc | DATA PROCESSING SYSTEM AND METHOD FOR ORDERING TASKS IN A DATA PROCESSING SYSTEM |
| US9448846B2 (en) * | 2011-12-13 | 2016-09-20 | International Business Machines Corporation | Dynamically configurable hardware queues for dispatching jobs to a plurality of hardware acceleration engines |
| US9286106B1 (en) * | 2013-04-16 | 2016-03-15 | Ca, Inc. | Scheduling periodic tasks with dependencies and determining improper loop dependencies between tasks placed in a waiting tasks set and in a unfinished dependent tasks set |
| US10437650B2 (en) * | 2014-06-19 | 2019-10-08 | Nec Corporation | Controlling execution of tasks in a series of operational processing by identifying processing units based on task command, task setting information, state of operational processing |
| US9569255B1 (en) * | 2015-03-25 | 2017-02-14 | Amazon Technologies, Inc. | Persistent state machine |
| US9703603B1 (en) * | 2016-04-25 | 2017-07-11 | Nxp Usa, Inc. | System and method for executing accelerator call |
| US20180150256A1 (en) * | 2016-11-29 | 2018-05-31 | Intel Corporation | Technologies for data deduplication in disaggregated architectures |
| US10228693B2 (en) * | 2017-01-13 | 2019-03-12 | Ford Global Technologies, Llc | Generating simulated sensor data for training and validation of detection models |
| US10409638B2 (en) * | 2017-04-10 | 2019-09-10 | Bank Of America Corporation | Digital processing system for event and/or time based triggering management, and control of tasks |
| US11644834B2 (en) * | 2017-11-10 | 2023-05-09 | Nvidia Corporation | Systems and methods for safe and reliable autonomous vehicles |
| CN109933414A (zh) * | 2017-12-18 | 2019-06-25 | 飞狐信息技术(天津)有限公司 | 一种任务调度方法、装置及系统 |
| JP7091820B2 (ja) * | 2018-05-14 | 2022-06-28 | オムロン株式会社 | 制御システム、学習データ作成装置、学習装置および判定装置 |
| CN110826706B (zh) * | 2018-08-10 | 2023-10-03 | 北京百度网讯科技有限公司 | 用于神经网络的数据处理方法和装置 |
| US10796448B2 (en) * | 2018-11-09 | 2020-10-06 | NEX Team Inc. | Methods and systems for player location determination in gameplay with a mobile device |
| CN109828837B (zh) * | 2019-01-25 | 2022-10-21 | 桂林电子科技大学 | 基于最长路径优先的关联性任务调度方法 |
| CN110134499A (zh) * | 2019-03-29 | 2019-08-16 | 新智云数据服务有限公司 | 任务调度方法、任务调度系统、存储介质和计算机设备 |
| CN110032453B (zh) * | 2019-04-19 | 2022-05-03 | 上海兆芯集成电路有限公司 | 用以任务调度与分配的处理系统及其加速方法 |
| CN110032452B (zh) * | 2019-04-19 | 2021-08-24 | 上海兆芯集成电路有限公司 | 处理系统与异构处理器加速方法 |
| CN110046053B (zh) * | 2019-04-19 | 2021-11-12 | 上海兆芯集成电路有限公司 | 用以分配任务的处理系统及其访存方法 |
-
2020
- 2020-03-31 CN CN202080093561.4A patent/CN114981776A/zh active Pending
- 2020-03-31 JP JP2022559487A patent/JP7553176B2/ja active Active
- 2020-03-31 WO PCT/CN2020/082395 patent/WO2021195949A1/zh not_active Ceased
- 2020-03-31 EP EP20928841.4A patent/EP4120077A4/en active Pending
-
2022
- 2022-09-28 US US17/954,878 patent/US20230022294A1/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009069921A (ja) | 2007-09-11 | 2009-04-02 | Hitachi Ltd | マルチプロセッサシステム |
| JP2009093218A (ja) | 2007-10-03 | 2009-04-30 | Fuji Xerox Co Ltd | 画像処理装置及びプログラム |
| WO2017131187A1 (ja) | 2016-01-29 | 2017-08-03 | 日本電気株式会社 | アクセラレータ制御装置、アクセラレータ制御方法およびプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| CN114981776A (zh) | 2022-08-30 |
| WO2021195949A1 (zh) | 2021-10-07 |
| EP4120077A4 (en) | 2023-04-05 |
| JP2023519405A (ja) | 2023-05-10 |
| US20230022294A1 (en) | 2023-01-26 |
| EP4120077A1 (en) | 2023-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7553176B2 (ja) | ハードウェアアクセラレータをスケジューリングするための方法およびタスクスケジューラ | |
| EP3830716B1 (en) | Storage edge controller with a metadata computational engine | |
| EP2131278A1 (en) | Scheduling of multiple tasks in a system including multiple computing elements | |
| US20230102089A1 (en) | Monitoring execution of application schedules in computing systems | |
| US11237991B2 (en) | Image processing accelerator | |
| US20230037738A1 (en) | Built-in self-test for a programmable vision accelerator of a system on a chip | |
| US11704067B2 (en) | Performing multiple point table lookups in a single cycle in a system on chip | |
| US20220222129A1 (en) | System for parallel processing middleware node application algorithms using threads | |
| US20230049442A1 (en) | Reduced memory write requirements in a system on a chip using automatic store predication | |
| US20150268985A1 (en) | Low Latency Data Delivery | |
| CN115509453A (zh) | 日志处理方法、装置、电子设备、存储介质以及车辆 | |
| CN109960571A (zh) | 一种多模块调度方法、装置及系统 | |
| US10452449B1 (en) | Scheduler for vector processing operator allocation | |
| US11966756B2 (en) | Method for scheduling feature services with a distributed data flow service framework | |
| CN108986253B (zh) | 用于多线程并行处理的存储数据方法和装置 | |
| KR102244556B1 (ko) | 공유 자원에 대한 우선순위 기반 액세스 관리 | |
| WO2025082182A1 (zh) | 车载控制器诊断方法和系统、电子装置、车辆、及存储介质 | |
| Elliott et al. | Gpusync: Architecture-aware management of gpus for predictable multi-gpu real-time systems | |
| CN101278277B (zh) | 运算处理装置 | |
| JPH0844662A (ja) | 情報処理装置 | |
| CN114758508B (zh) | 一种多车道抓拍补光控制方法、系统、设备和介质 | |
| CN110347633A (zh) | 基于多核的叠加车辆信号状态图标的方法、装置、介质 | |
| CN121210069A (zh) | 片上系统、任务调度方法、介质和设备 | |
| CN119903014A (zh) | 一种通信方法、装置、芯片系统和电子设备 | |
| CN116225644A (zh) | 模型训练系统的调度方法、电子设备和介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20221101 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20221101 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230929 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20231003 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231218 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20240319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240712 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20240725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240830 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7553176 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |