JP7541964B2 - 信号処理装置、信号処理方法 - Google Patents
信号処理装置、信号処理方法 Download PDFInfo
- Publication number
- JP7541964B2 JP7541964B2 JP2021163073A JP2021163073A JP7541964B2 JP 7541964 B2 JP7541964 B2 JP 7541964B2 JP 2021163073 A JP2021163073 A JP 2021163073A JP 2021163073 A JP2021163073 A JP 2021163073A JP 7541964 B2 JP7541964 B2 JP 7541964B2
- Authority
- JP
- Japan
- Prior art keywords
- sound
- signal
- collecting unit
- signal processing
- processing device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R3/00—Circuits for transducers
- H04R3/005—Circuits for transducers for combining the signals of two or more microphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R1/00—Details of transducers, loudspeakers or microphones
- H04R1/20—Arrangements for obtaining desired frequency or directional characteristics
- H04R1/32—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only
- H04R1/40—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only by combining a number of identical transducers
- H04R1/406—Arrangements for obtaining desired frequency or directional characteristics for obtaining desired directional characteristic only by combining a number of identical transducers microphones
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2201/00—Details of transducers, loudspeakers or microphones covered by H04R1/00 but not provided for in any of its subgroups
- H04R2201/40—Details of arrangements for obtaining desired directional characteristic by combining a number of identical transducers covered by H04R1/40 but not provided for in any of its subgroups
- H04R2201/401—2D or 3D arrays of transducers
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04R—LOUDSPEAKERS, MICROPHONES, GRAMOPHONE PICK-UPS OR LIKE ACOUSTIC ELECTROMECHANICAL TRANSDUCERS; ELECTRIC HEARING AIDS; PUBLIC ADDRESS SYSTEMS
- H04R2430/00—Signal processing covered by H04R, not provided for in its groups
- H04R2430/20—Processing of the output signals of the acoustic transducers of an array for obtaining a desired directivity characteristic
- H04R2430/23—Direction finding using a sum-delay beam-former
Landscapes
- Health & Medical Sciences (AREA)
- Otolaryngology (AREA)
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Acoustics & Sound (AREA)
- Signal Processing (AREA)
- General Health & Medical Sciences (AREA)
- Circuit For Audible Band Transducer (AREA)
- Measurement Of Velocity Or Position Using Acoustic Or Ultrasonic Waves (AREA)
Description
前記選択収音部からの音響信号を前記選択収音部と前記対象物との間の距離に基づく遅延量に基づいて遅延させた遅延音響信号を取得し、それぞれの選択収音部について取得した遅延音響信号の合成結果を、前記対象物の音響信号として出力する合成手段と
を備え、
前記合成手段は、それぞれの選択収音部について、該選択収音部について取得した遅延音響信号を、該選択収音部と前記対象物との間の距離に応じて増幅させた増幅音響信号を取得し、それぞれの選択収音部について取得した増幅音響信号を合成した合成結果を、前記対象物の音響信号として出力することを特徴とする。
本実施形態に係る信号処理装置は、対象物を含む複数の撮像画像に基づいて推定された該対象物の位置に基づき、複数の収音部から2以上の収音部を選択収音部として選択する。そして信号処理装置は、該選択収音部からの音響信号を該選択収音部と該対象物との間の距離に基づく遅延量に基づいて遅延させた遅延音響信号を取得し、それぞれの選択収音部について取得した遅延音響信号の合成結果を、該対象物の音響信号として出力する。まず、このような信号処理装置の機能構成例について、図1のブロック図を用いて説明する。
なお、遅延量Dijを求めるための式は(式1)に限らず、RijとRrefとの差分をαで除した計算を含む式であれば、遅延量Dijを求めるための式は特定の式に限らない。
つまり遅延制御部1052は、遅延量Dijを打ち消すように音響信号Sij(t)を時間方向にシフトすることで、対象物Ti間近で収音した場合と同等の遅延量となる音響信号Sdij(t)を得る。Rrefは、例えばテレビ番組や映画の撮影において、収音作業者がカメラの映り込みを回避しつつ、対象物に向けるマイクロフォンと対象物との間の距離であっても良い。
ここで、log10()は常用対数であり、Rgrefは、対象物に対する理想的な音波受信部104の距離として予め設定されている距離を表している。また、ここでは、対象物の発する音を点音源としている。
ただし、Σはj=1~xについて総和を計算することを表す。一般的に点音源に対する音波の減衰量は距離が2倍離れると約6dB減衰することから、上記の(式3)により求められる増幅係数Gjxにより遅延音響信号Sdijを増幅させ、増幅後の遅延音響信号の合成結果を、対象物Tiの音響信号とする。St1は第1対象物の音響信号であり、St2は第2対象物の音響信号であり、Stmは第m対象物の音響信号である。
音波受信部104は方位角、仰角を制御可能な電動雲台と組み合わされても良く、その場合、信号処理装置10は電動雲台を制御して、音波受信部104が対象物の方向に向くように該音波受信部104の方位角、仰角を制御しても良い。
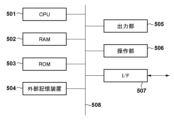
図1では、信号処理装置10は、画像受信部101および音波受信部104を含んで構成されているが、画像受信部101および音波受信部104は信号処理装置10の外部装置であっても良い。つまり信号処理装置10は生成部102、推定部103、制御部105(信号選択部1051、遅延制御部1052、信号合成部1053)を有し、不図示のインターフェースを介して画像受信部101および音波受信部104を信号処理装置10に接続するように構成しても良い。この場合、生成部102、推定部103、制御部105(信号選択部1051、遅延制御部1052、信号合成部1053)はハードウェアで実装しても良いし、ソフトウェア(コンピュータプログラム)で実装しても良い。後者の場合、このようなコンピュータプログラムを実行可能なコンピュータ装置は、信号処理装置10に適用可能である。信号処理装置10に適用可能であるコンピュータ装置のハードウェア構成例について、図5のブロック図を用いて説明する。
本発明は、上述の実施形態の1以上の機能を実現するプログラムを、ネットワーク又は記憶媒体を介してシステム又は装置に供給し、そのシステム又は装置のコンピュータにおける1つ以上のプロセッサがプログラムを読出し実行する処理でも実現可能である。また、1以上の機能を実現する回路(例えば、ASIC)によっても実現可能である。
Claims (8)
- 対象物を含む複数の撮像画像に基づいて推定された該対象物の位置に基づき、複数の収音部から2以上の収音部を選択収音部として選択する選択手段と、
前記選択収音部からの音響信号を前記選択収音部と前記対象物との間の距離に基づく遅延量に基づいて遅延させた遅延音響信号を取得し、それぞれの選択収音部について取得した遅延音響信号の合成結果を、前記対象物の音響信号として出力する合成手段と
を備え、
前記合成手段は、それぞれの選択収音部について、該選択収音部について取得した遅延音響信号を、該選択収音部と前記対象物との間の距離に応じて増幅させた増幅音響信号を取得し、それぞれの選択収音部について取得した増幅音響信号を合成した合成結果を、前記対象物の音響信号として出力することを特徴とする信号処理装置。 - 前記選択手段は、前記複数の撮像画像に基づいて生成された前記対象物の3次元モデルに基づいて推定された前記対象物の位置に基づき、前記複数の収音部から2以上の収音部を選択収音部として選択することを特徴とする請求項1に記載の信号処理装置。
- 前記選択手段は、前記複数の収音部のうち前記位置に近い順に2以上の収音部を選択収音部として選択することを特徴とする請求項2に記載の信号処理装置。
- 前記合成手段は、前記選択収音部と前記対象物との間の距離と、前記対象物に対する理想的な収音部の距離として予め設定されている距離と、の差分を音速で除した結果を、該選択収音部からの音響信号に対する遅延量として取得することを特徴とする請求項1ないし3の何れか1項に記載の信号処理装置。
- 前記合成手段は、前記選択収音部と前記対象物との間の距離を、前記対象物に対する理想的な収音部の距離として予め設定されている距離で除した結果の常用対数の値を増幅係数として求め、該選択収音部について取得した遅延音響信号を該増幅係数に応じて増幅させた増幅音響信号を取得することを特徴とする請求項1に記載の信号処理装置。
- さらに、
前記収音部が前記対象物の方向に向くように該収音部の方位角、仰角を制御する手段を備えることを特徴とする請求項1ないし5の何れか1項に記載の信号処理装置。 - 信号処理装置が行う信号処理方法であって、
前記信号処理装置の選択手段が、対象物を含む複数の撮像画像に基づいて推定された該対象物の位置に基づき、複数の収音部から2以上の収音部を選択収音部として選択する選択工程と、
前記信号処理装置の合成手段が、前記選択収音部からの音響信号を前記選択収音部と前記対象物との間の距離に基づく遅延量に基づいて遅延させた遅延音響信号を取得し、それぞれの選択収音部について取得した遅延音響信号の合成結果を、前記対象物の音響信号として出力する合成工程と
を備え、
前記合成工程では、それぞれの選択収音部について、該選択収音部について取得した遅延音響信号を、該選択収音部と前記対象物との間の距離に応じて増幅させた増幅音響信号を取得し、それぞれの選択収音部について取得した増幅音響信号を合成した合成結果を、前記対象物の音響信号として出力することを特徴とする信号処理方法。 - コンピュータを、請求項1ないし6の何れか1項に記載の信号処理装置の各手段として機能させるためのコンピュータプログラム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021163073A JP7541964B2 (ja) | 2021-10-01 | 2021-10-01 | 信号処理装置、信号処理方法 |
| US17/951,260 US12089000B2 (en) | 2021-10-01 | 2022-09-23 | Signal processing apparatus, signal processing method, and non-transitory computer-readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021163073A JP7541964B2 (ja) | 2021-10-01 | 2021-10-01 | 信号処理装置、信号処理方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023053804A JP2023053804A (ja) | 2023-04-13 |
| JP7541964B2 true JP7541964B2 (ja) | 2024-08-29 |
Family
ID=85774487
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021163073A Active JP7541964B2 (ja) | 2021-10-01 | 2021-10-01 | 信号処理装置、信号処理方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US12089000B2 (ja) |
| JP (1) | JP7541964B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7548853B2 (ja) * | 2021-03-24 | 2024-09-10 | Towa株式会社 | 加工装置、及び加工品の製造方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020059447A1 (ja) | 2018-09-18 | 2020-03-26 | 富士フイルム株式会社 | 音声信号処理装置、音声信号処理方法、音声信号処理プログラム、音声信号処理システム及び撮影装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3714706B2 (ja) | 1995-02-17 | 2005-11-09 | 株式会社竹中工務店 | 音抽出装置 |
| KR101990370B1 (ko) * | 2014-11-26 | 2019-06-18 | 한화테크윈 주식회사 | 카메라 시스템 및 카메라 시스템 동작 방법 |
| JP6827996B2 (ja) | 2018-10-31 | 2021-02-10 | キヤノン株式会社 | 画像処理装置、制御方法、及び、プログラム |
| JP2021012314A (ja) | 2019-07-08 | 2021-02-04 | キヤノン株式会社 | 集音処理装置、集音処理方法、及びプログラム |
| US11722763B2 (en) * | 2021-08-06 | 2023-08-08 | Motorola Solutions, Inc. | System and method for audio tagging of an object of interest |
-
2021
- 2021-10-01 JP JP2021163073A patent/JP7541964B2/ja active Active
-
2022
- 2022-09-23 US US17/951,260 patent/US12089000B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020059447A1 (ja) | 2018-09-18 | 2020-03-26 | 富士フイルム株式会社 | 音声信号処理装置、音声信号処理方法、音声信号処理プログラム、音声信号処理システム及び撮影装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2023053804A (ja) | 2023-04-13 |
| US12089000B2 (en) | 2024-09-10 |
| US20230105382A1 (en) | 2023-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6023779B2 (ja) | オーディオ情報処理の方法及び装置 | |
| JP6882868B2 (ja) | 画像処理装置、画像処理方法、システム | |
| JP2019083402A (ja) | 画像処理装置、画像処理システム、画像処理方法、及びプログラム | |
| TW201120469A (en) | Method, computer readable storage medium and system for localizing acoustic source | |
| JP2019201325A (ja) | 撮像装置、その制御方法、および、プログラム | |
| CN105245811A (zh) | 一种录像方法及装置 | |
| JP2022010300A (ja) | 映像音声信号処理装置、映像音声信号処理方法及び映像音声信号処理システム | |
| EP2478715B1 (en) | Method for acquiring audio signals, and audio acquisition system thereof | |
| JP7541964B2 (ja) | 信号処理装置、信号処理方法 | |
| JP2003264900A (ja) | 音響提示システムと音響取得装置と音響再生装置及びその方法並びにコンピュータ読み取り可能な記録媒体と音響提示プログラム | |
| KR101664733B1 (ko) | 전 방향 고해상도 추적 녹화 장치 및 방법 | |
| US11979732B2 (en) | Generating audio output signals | |
| CN114554154B (zh) | 音视频拾音器位置选择方法及系统、音视频采集终端与存储介质 | |
| CN116095254B (zh) | 音频处理方法和装置 | |
| WO2023054047A1 (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| JP7245034B2 (ja) | 信号処理装置、信号処理方法およびプログラム | |
| JP5764097B2 (ja) | 画像処理装置、画像処理方法及び画像処理プログラム | |
| JP2024507191A5 (ja) | ||
| JP4518729B2 (ja) | 画像音響提示システムと方法並びにコンピュータ読み取り可能な記録媒体と画像音響提示プログラム | |
| WO2016202111A1 (zh) | 一种基于拍照的音频输出方法和装置 | |
| CN114205695A (zh) | 一种音响参数确定方法和系统 | |
| JP7761208B2 (ja) | 音源分離装置、音源分離方法、およびプログラム | |
| WO2025062722A1 (ja) | 撮影システム、制御方法、映像生成方法及びコンピュータプログラム | |
| JP2017204869A (ja) | 再生処理装置、撮像装置および再生処理プログラム | |
| JP2024059438A (ja) | 画像処理システム、画像処理システムの制御方法、画像処理装置、画像処理方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230927 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20240426 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240531 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240701 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240716 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240819 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7541964 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |