JP7515134B2 - IMAGE PROCESSING APPARATUS, IMAGE PROCESSING METHOD, IMAGE PROCESSING PROGRAM, AND IMAGE READING APPARATUS - Google Patents
IMAGE PROCESSING APPARATUS, IMAGE PROCESSING METHOD, IMAGE PROCESSING PROGRAM, AND IMAGE READING APPARATUS Download PDFInfo
- Publication number
- JP7515134B2 JP7515134B2 JP2023509127A JP2023509127A JP7515134B2 JP 7515134 B2 JP7515134 B2 JP 7515134B2 JP 2023509127 A JP2023509127 A JP 2023509127A JP 2023509127 A JP2023509127 A JP 2023509127A JP 7515134 B2 JP7515134 B2 JP 7515134B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- image reading
- image processing
- scanning direction
- data
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000012545 processing Methods 0.000 title claims description 125
- 238000003672 processing method Methods 0.000 title claims description 8
- PWPJGUXAGUPAHP-UHFFFAOYSA-N lufenuron Chemical compound C1=C(Cl)C(OC(F)(F)C(C(F)(F)F)F)=CC(Cl)=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F PWPJGUXAGUPAHP-UHFFFAOYSA-N 0.000 title 1
- 238000001228 spectrum Methods 0.000 claims description 86
- 238000000034 method Methods 0.000 claims description 57
- 230000003595 spectral effect Effects 0.000 claims description 56
- 238000012937 correction Methods 0.000 claims description 49
- 230000001678 irradiating effect Effects 0.000 claims 1
- 238000010586 diagram Methods 0.000 description 40
- 238000003384 imaging method Methods 0.000 description 20
- 238000007689 inspection Methods 0.000 description 10
- 230000006870 function Effects 0.000 description 9
- 238000006243 chemical reaction Methods 0.000 description 5
- 230000007547 defect Effects 0.000 description 5
- 239000000758 substrate Substances 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 239000002131 composite material Substances 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 238000003786 synthesis reaction Methods 0.000 description 4
- 238000009792 diffusion process Methods 0.000 description 3
- 235000013305 food Nutrition 0.000 description 3
- 238000005286 illumination Methods 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- -1 clothes Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 238000005476 soldering Methods 0.000 description 2
- 241000238631 Hexapoda Species 0.000 description 1
- 241001465754 Metazoa Species 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 235000008429 bread Nutrition 0.000 description 1
- 235000021438 curry Nutrition 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 229910052736 halogen Inorganic materials 0.000 description 1
- 150000002367 halogens Chemical class 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 235000008960 ketchup Nutrition 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 238000009659 non-destructive testing Methods 0.000 description 1
- 239000004745 nonwoven fabric Substances 0.000 description 1
- 235000012149 noodles Nutrition 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 239000004575 stone Substances 0.000 description 1
- 230000007847 structural defect Effects 0.000 description 1
- 239000004753 textile Substances 0.000 description 1
- 239000012780 transparent material Substances 0.000 description 1
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/10—Image enhancement or restoration using non-spatial domain filtering
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/04—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa
- H04N1/19—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using multi-element arrays
- H04N1/195—Scanning arrangements, i.e. arrangements for the displacement of active reading or reproducing elements relative to the original or reproducing medium, or vice versa using multi-element arrays the array comprising a two-dimensional array or a combination of two-dimensional arrays
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/387—Composing, repositioning or otherwise geometrically modifying originals
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Facsimile Scanning Arrangements (AREA)
Description
本発明は、ライン状に対象物を読み取ることにより得られる読取画像データを処理する、画像処理装置、画像処理方法、画像処理プログラム及び画像読取装置に関するものである。 The present invention relates to an image processing device, an image processing method, an image processing program, and an image reading device that process read image data obtained by reading an object in a line.
従来から主として可視域の光源を用いた表面検査装置に採用されているシステムは、ラインセンサ、密着型イメージセンサ、或いは、レーザビームによる走査型光学系と光電変換素子(フォトマル、アバランシェフォトダイオード、CCDセンサ、CMOSセンサなど)やライトガイドを含む受光光学系の組合せなどが代表的な検査システムであり、その多くは、検査対象(読取対象)におけるキズ、凹凸、欠陥、欠落、付着した異物などからの反射光や蛍光を受光する反射型である。なお、検査対象として、紙製品、食品の他、産業用として、フィルム又はシートのような樹脂成型物などが挙げられる。 Typical systems that have traditionally been used in surface inspection equipment that mainly uses a light source in the visible range are line sensors, contact image sensors, or a combination of a scanning optical system using a laser beam and a light receiving optical system including a photoelectric conversion element (photomultiplier, avalanche photodiode, CCD sensor, CMOS sensor, etc.) and a light guide, and most of these are reflective types that receive reflected light or fluorescence from scratches, unevenness, defects, missing parts, attached foreign matter, etc. on the inspection object (read object). In addition, examples of inspection objects include paper products, food, and for industrial use, resin molded objects such as films or sheets.
それに対し、受光系と照明系とを検査対象を挟んで対向配置した透過型において、検査対象は、透明で、薄く、透過率が高いものが多い。そして、厚みのある検査対象において、その検査対象に含まれる異物やキズ、欠陥等の対象物を検出するシステムは稀である。 In contrast, in a transmission type where the light receiving system and the illumination system are arranged opposite each other with the object to be inspected in between, the objects to be inspected are often transparent, thin, and highly transmittant. However, there are very few systems that can detect foreign objects, scratches, defects, and other objects contained in thick objects to be inspected.
また、非破壊検査装置として名高い透過性に優れたX線検査装置は、放射線であるX線を用いるため、放射線管理区域を設ける必要があり、放射線の人への被ばく量も管理しなければならない。即ち、設置場所を決定するうえでのハードルが高い。しかも、大型であり、重量もあるため、工場の既存の生産ラインへの追加導入は容易ではない。加えて、高額であるため、検査ポイントを多く設けることができない。 X-ray inspection equipment, which is renowned as a non-destructive testing device with excellent transparency, uses X-rays, which are a type of radiation, so it is necessary to set up a radiation control area and control the amount of radiation exposure to people. In other words, there are high hurdles in deciding where to install them. Moreover, because they are large and heavy, it is not easy to add them to a factory's existing production line. In addition, because they are expensive, it is not possible to install many inspection points.
さらに、X線検査装置は、X線自身の良好な透過性が仇となり、異物や欠陥、キズといったものまで透過してしまい、区別が出来ない場合も多い。 Furthermore, the excellent transparency of X-rays themselves is a drawback for X-ray inspection equipment, as they can penetrate even foreign objects, defects, and scratches, making it often impossible to distinguish between them.
特許文献1では、ライン光源及びラインセンサを備える従来の画像読取装置の一例が開示されている。従来の透過方式の画像読取装置では、X線検査装置のように検査対象に含まれる異物や欠陥、キズ等に起因してライン光源から出射される光が散乱する。 Patent Document 1 discloses an example of a conventional image reading device equipped with a line light source and a line sensor. In conventional transmission type image reading devices, like X-ray inspection devices, light emitted from the line light source is scattered due to foreign objects, defects, scratches, etc. contained in the inspection object.
特に、検査対象が分厚い場合などには、画像読取装置で対象物がライン状に読み取られ、その対象物を示すデータ形式の画像が生成される場合、画像上の対象物に対応する領域である対象領域の輪郭がぼけやすい。対象領域は、具体的には、画像上で対象物を構成する画素の領域である。In particular, when the object to be inspected is thick, and the object is scanned in a line by an image reader and a data format image showing the object is generated, the contour of the object area, which is the area on the image that corresponds to the object, tends to become blurred. The object area is specifically the area of pixels that make up the object on the image.
本願発明者らは、上記のような画像上の対象領域の輪郭のぼけに着目し、鋭意検討した結果、副走査方向においては、回り込みの光による画像上の対象領域の輪郭のぼけが除去されるが、主走査方向においては、ぼけが除去されないことが、鮮明な出力画像データを得られない原因になっていると考えるに至った。The inventors of the present application focused on the blurring of the contours of the target area on the image as described above, and after extensive investigation, came to the conclusion that while the blurring of the contours of the target area on the image caused by stray light is eliminated in the sub-scanning direction, the blurring is not eliminated in the main scanning direction, which is why clear output image data cannot be obtained.
本発明は、上記実情に鑑みてなされたものであり、ライン状に対象物を読み取ることにより得られる、複数の読取画像データに画像処理を施すことで、対象領域の輪郭が鮮明な出力画像データを生成することができる画像処理装置、画像処理方法、画像処理プログラム及び画像読取装置を提供することを目的とする。The present invention has been made in consideration of the above-mentioned situation, and aims to provide an image processing device, an image processing method, an image processing program, and an image reading device that can generate output image data with clear contours of the target area by applying image processing to multiple read image data obtained by reading an object in a line.
本発明に係る画像処理装置は、同一の対象物に対して、それぞれ異なる方向に延びる主走査方向に沿ってライン状に当該対象物を読み取ることにより得られる複数の読取画像データに画像処理を施す画像処理装置であって、当該画像処理装置は、スペクトル生成処理部と、比較処理部と、合成スペクトル生成処理部と、画像生成処理部とを備える。前記スペクトル生成処理部は、前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施すことで、複数のスペクトルデータを生成する。前記比較処理部は、前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する。前記合成スペクトル生成処理部は、前記比較処理部による比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する。前記画像生成処理部は、前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する。The image processing device according to the present invention is an image processing device that performs image processing on multiple read image data obtained by reading the same object in lines along main scanning directions that extend in different directions, and the image processing device includes a spectrum generation processing unit, a comparison processing unit, a synthetic spectrum generation processing unit, and an image generation processing unit. The spectrum generation processing unit generates multiple spectral data by performing Fourier transform processing on each of the multiple read image data. The comparison processing unit compares each component corresponding to the same frequency in the multiple spectral data. The synthetic spectrum generation processing unit generates synthetic spectral data by selecting one of the components corresponding to the same frequency in the multiple spectral data based on the comparison result by the comparison processing unit. The image generation processing unit generates output image data by performing inverse Fourier transform processing on the synthetic spectral data.
このような構成によれば、対象物に対応する領域の輪郭が鮮明な出力画像データを生成することができる。 With this configuration, it is possible to generate output image data with clear contours of the area corresponding to the target object.
前記合成スペクトル生成処理部は、前記複数のスペクトルデータの同一周波数に対応する各成分の中から最も大きい成分を選択してもよい。The synthetic spectrum generation processing unit may select the largest component from among the components corresponding to the same frequency of the multiple spectral data.
このような構成によれば、対象物に対応する領域の輪郭がより鮮明な出力画像データを生成することができる。また、このような構成によれば、読取画像データの数が多いほど、対象物に対応する領域の輪郭がより鮮明な出力画像データを生成することができると思われる。 With this configuration, it is possible to generate output image data in which the contours of the area corresponding to the object are clearer. It is also believed that with this configuration, the greater the number of read image data, the clearer the contours of the area corresponding to the object can be generated.
前記画像処理装置は、前記複数の読取画像データのそれぞれにおける画像上で前記対象物に対応する領域が略同一に位置されるように、フーリエ変換処理が施される前の前記複数の読取画像データの少なくとも1つに対して補正処理を施す補正処理部をさらに備えていてもよい。この場合、前記スペクトル生成処理部は、前記補正処理部による補正処理が施された前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施してもよい。The image processing device may further include a correction processing unit that performs a correction process on at least one of the plurality of read image data before Fourier transform processing is performed so that the area corresponding to the object is positioned approximately identically on the image in each of the plurality of read image data. In this case, the spectrum generation processing unit may perform a Fourier transform process on each of the plurality of read image data that has been subjected to the correction process by the correction processing unit.
このような構成によれば、各読取画像データにおいて、対象物に対応する領域を略同一に位置させることができる。 With this configuration, the area corresponding to the object can be positioned approximately identically in each scanned image data.
前記補正処理部は、フーリエ変換処理が施される前の前記複数の読取画像データの少なくとも1つに対して、当該読取画像データにおける画像上の前記対象物に対応する領域の傾き又は倍率を補正してもよい。The correction processing unit may correct the inclination or magnification of an area in the image of at least one of the plurality of read image data before the Fourier transform processing is performed, which corresponds to the object.
このような構成によれば、読取画像データにおいて、対象物に対応する領域の傾き又は倍率を補正することで、各読取画像データにおいて、対象物に対応する領域を略同一に位置させることができる。 With this configuration, by correcting the inclination or magnification of the area corresponding to the object in the scanned image data, the area corresponding to the object can be positioned approximately identically in each scanned image data.
本発明に係る画像読取装置は、複数のラインセンサと、前記画像処理装置とを備える。前記複数のラインセンサは、それぞれ主走査方向に沿ってライン状に画像を読み取り可能であり、当該主走査方向が副走査方向に対してそれぞれ異なる方向に延びる。前記画像処理装置は、前記複数のラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。The image reading device according to the present invention comprises a plurality of line sensors and the image processing device. The plurality of line sensors are each capable of reading an image in a line shape along a main scanning direction, and the main scanning direction extends in a different direction from the sub-scanning direction. The image processing device performs image processing on a plurality of read image data obtained by reading the same object with the plurality of line sensors.
このような構成によれば、対象物又は複数のラインセンサが副走査方向に移動するだけで、つまり、一度の動作だけで複数の読取画像データを生成することができる。すなわち、このような構成によれば、効率よく複数の読取画像データを得ることできる。With this configuration, multiple scanned image data can be generated simply by moving the object or multiple line sensors in the sub-scanning direction, i.e., with just one operation. In other words, with this configuration, multiple scanned image data can be obtained efficiently.
前記複数のラインセンサには、主走査方向が互いに直交するように配置された2つのラインセンサが含まれていてもよい。The plurality of line sensors may include two line sensors arranged so that their main scanning directions are perpendicular to each other.
このような構成によれば、2つのラインセンサを用いて、効率よく複数の読取画像データを得ることできる。 With this configuration, multiple scanned image data can be obtained efficiently using two line sensors.
前記2つのラインセンサは、それぞれの主走査方向が前記副走査方向に対して45°の角度で交差するように配置されていてもよい。The two line sensors may be arranged so that their respective main scanning directions intersect at an angle of 45° with respect to the sub-scanning direction.
このような構成によれば、2つのラインセンサを用いて、さらに効率よく複数の読取画像データを得ることできる。 With this configuration, multiple scanned image data can be obtained more efficiently using two line sensors.
前記複数のラインセンサが、前記副走査方向に対して交差する方向に並べて配置されていてもよい。The multiple line sensors may be arranged in a direction intersecting the sub-scanning direction.
このような構成によれば、副走査方向と交差する方向に並べて配置された複数のラインセンサで、対象物を分割して読み取ることができる。これにより、副走査方向におけるラインセンサの配置領域を狭めて、省スペース化することができる。 With this configuration, the object can be divided and read by multiple line sensors arranged in a line in a direction intersecting the sub-scanning direction. This makes it possible to narrow the area in which the line sensors are arranged in the sub-scanning direction, thereby saving space.
本発明の画像読取装置は、少なくとも1つのラインセンサと、前記画像処理装置とを備える。前記少なくとも1つのラインセンサは、副走査方向に対して交差する長手方向に沿って長尺形状を有する。前記画像処理装置は、前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。前記少なくとも1つのラインセンサには、前記長手方向に対して傾斜し、前記長手方向に並べて配置される複数の第1撮像素子と、前記長手方向に対して前記第1撮像素子とは異なる角度で傾斜し、前記長手方向に並べて配置される複数の第2撮像素子とが含まれる。The image reading device of the present invention comprises at least one line sensor and the image processing device. The at least one line sensor has an elongated shape along a longitudinal direction intersecting with the sub-scanning direction. The image processing device performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor. The at least one line sensor includes a plurality of first image pickup elements inclined with respect to the longitudinal direction and arranged side by side in the longitudinal direction, and a plurality of second image pickup elements inclined at an angle different from that of the first image pickup elements with respect to the longitudinal direction and arranged side by side in the longitudinal direction.
このような構成によれば、副走査方向における各ラインセンサの配置領域を狭めて、省スペース化することができる。 With this configuration, the placement area of each line sensor in the sub-scanning direction can be narrowed, thereby saving space.
前記少なくとも1つのラインセンサには、2つのラインセンサが含まれ、前記2つのラインセンサのうちの一方には、前記長手方向に対して傾斜する前記複数の第1撮像素子が前記長手方向に並べて配置され、前記2つのラインセンサのうちの他方には、前記長手方向に対して前記第1撮像素子とは異なる角度で傾斜する前記複数の第2撮像素子が前記長手方向に並べて配置されていてもよい。The at least one line sensor may include two line sensors, one of which may have the plurality of first imaging elements arranged in the longitudinal direction and inclined with respect to the longitudinal direction, and the other of which may have the plurality of second imaging elements arranged in the longitudinal direction and inclined at an angle different from that of the first imaging elements.
このような構成によれば、各ラインセンサの長手方向に沿って複数の第1撮像素子又は複数の第2撮像素子を並べて配置する構成と比べて、副走査方向における各ラインセンサの配置領域を狭めて、省スペース化することができる。With this configuration, the arrangement area of each line sensor in the sub-scanning direction can be narrowed, thereby saving space, compared to a configuration in which multiple first imaging elements or multiple second imaging elements are arranged side by side along the longitudinal direction of each line sensor.
前記少なくとも1つのラインセンサのうちの1つには、前記長手方向に対して傾斜する前記複数の第1撮像素子が前記長手方向に並べて配置されるとともに、前記長手方向に対して前記第1撮像素子とは異なる角度で傾斜する前記複数の第2撮像素子が前記長手方向に並べて配置されている。In one of the at least one line sensor, the multiple first imaging elements inclined with respect to the longitudinal direction are arranged side by side in the longitudinal direction, and the multiple second imaging elements inclined with respect to the longitudinal direction at an angle different from that of the first imaging elements are arranged side by side in the longitudinal direction.
このような構成によれば、長手方向に沿って複数の第1撮像素子又は複数の第2撮像素子が並べて配置された2つのラインセンサを設ける構成と比べて、2つのラインセンサを一体化し、かつ、副走査方向におけるラインセンサの配置領域を狭めて、省スペース化することができる。 With this configuration, compared to a configuration in which two line sensors are provided with multiple first imaging elements or multiple second imaging elements arranged side by side along the longitudinal direction, the two line sensors can be integrated and the arrangement area of the line sensors in the sub-scanning direction can be narrowed, thereby saving space.
本発明の画像読取装置は、少なくとも1つのラインセンサと、前記画像処理装置とを備える。前記少なくとも1つのラインセンサは、主走査方向に沿ってライン状に画像を読み取り可能である。前記画像処理装置は、前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。前記ラインセンサは、光源と、スリット部材を有する。前記光源は、前記主走査方向に延び、前記対象物に光を照射する。前記スリット部材は、前記主走査方向に延び、前記対象物と前記光源との間に配置される。The image reading device of the present invention comprises at least one line sensor and the image processing device. The at least one line sensor is capable of reading an image in a line shape along the main scanning direction. The image processing device performs image processing on multiple read image data obtained by reading the same object with the at least one line sensor. The line sensor has a light source and a slit member. The light source extends in the main scanning direction and irradiates light onto the object. The slit member extends in the main scanning direction and is disposed between the object and the light source.
このような構成によれば、対象物に対する副走査方向での回り込みの光による画像上の輪郭のぼけを抑制することができるため、対象物に対応する領域の輪郭がより鮮明な出力画像データを生成することができる。 With this configuration, it is possible to suppress blurring of the image contours caused by light circulating around the object in the sub-scanning direction, thereby generating output image data with clearer contours in the area corresponding to the object.
本発明の画像読取装置は、少なくとも1つのラインセンサと、前記画像処理装置とを備える。前記少なくとも1つのラインセンサは、主走査方向に沿ってライン状に画像を読み取り可能である。前記画像処理装置は、前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。前記ラインセンサは、ラインレーザ光源を有する。前記ラインレーザ光源は、前記対象物に光を照射する。The image reading device of the present invention comprises at least one line sensor and the image processing device. The at least one line sensor is capable of reading an image in a line shape along the main scanning direction. The image processing device performs image processing on multiple read image data obtained by reading the same object with the at least one line sensor. The line sensor has a line laser light source. The line laser light source irradiates light onto the object.
このような構成によれば、ラインセンサとしてラインレーザ光源を用いることにより、対象物に対する副走査方向での回り込みの光による画像上の輪郭のぼけを抑制することができるため、部材の数を増やすことなく、対象物に対応する領域の輪郭がより鮮明な出力画像データを生成することができる。 With this configuration, by using a line laser light source as a line sensor, it is possible to suppress blurring of the image contours caused by light that wraps around the object in the sub-scanning direction, so that output image data can be generated with clearer contours in the area corresponding to the object without increasing the number of components.
本発明の画像読取装置は、少なくとも1つのラインセンサと、前記画像処理装置と、複数の搬送装置とを備える。前記少なくとも1つのラインセンサは、主走査方向に沿ってライン状に画像を読み取り可能である。前記画像処理装置は、前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。前記複数の搬送装置は、前記主走査方向に対して交差する方向に延びる搬送路に沿って前記対象物を搬送する。前記ラインセンサは、光源を有する。前記光源は、前記対象物に光を照射する。前記複数の搬送装置は、前記搬送路に沿って互いに隙間を空けて配置されており、前記光源は、前記搬送路に沿って搬送される前記対象物に前記隙間を介して光を照射し、又は、前記搬送路に沿って搬送される対象物に照射した光を前記隙間に入射させる。The image reading device of the present invention comprises at least one line sensor, the image processing device, and a plurality of conveying devices. The at least one line sensor is capable of reading an image in a line shape along a main scanning direction. The image processing device performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor. The plurality of conveying devices convey the object along a conveying path extending in a direction intersecting the main scanning direction. The line sensor has a light source. The light source irradiates light onto the object. The plurality of conveying devices are arranged along the conveying path with gaps between each other, and the light source irradiates light onto the object conveyed along the conveying path through the gap, or causes the light irradiated onto the object conveyed along the conveying path to enter the gap.
このような構成によれば、光源から照射された光が、対象物に到達するまでに吸収又は反射されるのを抑制することができるため、読取画像データにおいて、対象物に対応する領域の輪郭がぼやけるのを防止することができる。 With this configuration, it is possible to prevent the light emitted from the light source from being absorbed or reflected before it reaches the object, thereby preventing the contours of the area corresponding to the object from becoming blurred in the read image data.
本発明の画像読取装置は、少なくとも1つのラインセンサと、前記画像処理装置と、搬送装置とを備える。前記少なくとも1つのラインセンサは、主走査方向に沿ってライン状に画像を読み取り可能である。前記画像処理装置は、前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す。前記搬送装置は、前記主走査方向に対して交差する方向に延びる搬送路に沿って前記対象物を搬送する。前記ラインセンサは、光源を有する。前記光源は、前記対象物に光を照射する。前記搬送装置は、前記搬送路を形成する搬送面を含み、当該搬送面が光透過性を有することにより、前記光源からの光が前記搬送面を透過して前記対象物に照射される。The image reading device of the present invention comprises at least one line sensor, the image processing device, and a conveying device. The at least one line sensor is capable of reading an image in a line shape along a main scanning direction. The image processing device performs image processing on multiple read image data obtained by reading the same object with the at least one line sensor. The conveying device conveys the object along a conveying path extending in a direction intersecting the main scanning direction. The line sensor has a light source. The light source irradiates light onto the object. The conveying device includes a conveying surface that forms the conveying path, and the conveying surface is optically transparent, so that light from the light source passes through the conveying surface and is irradiated onto the object.
このような構成によれば、光源から照射された光が、対象物に到達するまでに吸収又は反射されるのを抑制することができるため、読取画像データにおいて、対象物に対応する領域の輪郭がぼやけるのを防止することができる。 With this configuration, it is possible to prevent the light emitted from the light source from being absorbed or reflected before it reaches the object, thereby preventing the contours of the area corresponding to the object from becoming blurred in the read image data.
本発明に係る画像処理方法は、同一の対象物に対して、それぞれ異なる方向に延びる主走査方向に沿ってライン状に当該対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す画像処理方法であって、当該画像処理方法は、スペクトル生成ステップと、比較ステップと、合成スペクトル生成ステップと、画像生成ステップを含む。前記スペクトル生成ステップは、前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施すことで、複数のスペクトルデータを生成する。前記比較ステップは、前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する。合成スペクトル生成処理ステップは、前記比較ステップによる比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する。前記画像生成ステップは、前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する。The image processing method according to the present invention is an image processing method that performs image processing on a plurality of read image data obtained by reading the same object in lines along main scanning directions that extend in different directions, and the image processing method includes a spectrum generation step, a comparison step, a synthetic spectrum generation step, and an image generation step. The spectrum generation step generates a plurality of spectral data by performing Fourier transform processing on each of the plurality of read image data. The comparison step compares each component corresponding to the same frequency of the plurality of spectral data. The synthetic spectrum generation processing step generates synthetic spectrum data by selecting one of the components corresponding to the same frequency of the plurality of spectral data based on the comparison result of the comparison step. The image generation step generates output image data by performing inverse Fourier transform processing on the synthetic spectrum data.
このような構成によれば、対象物に対応する領域の輪郭が鮮明な出力画像データを生成することが可能な画像処理方法を提供できる。 With this configuration, an image processing method can be provided that is capable of generating output image data with clear contours of the area corresponding to the object.
本発明に係る画像処理プログラムは、同一の対象物に対して、それぞれ異なる方向に延びる主走査方向に沿ってライン状に対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す画像処理プログラムであって、当該画像処理プログラムは、スペクトル生成ステップと、比較ステップと、合成スペクトル生成ステップと、画像生成ステップとをコンピュータに実行させる。前記スペクトル生成ステップは、前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施すことで、複数のスペクトルデータを生成する。前記比較ステップは、前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する。合成スペクトル生成処理ステップは、前記比較ステップによる比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する。前記画像生成ステップは、前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する。The image processing program according to the present invention is an image processing program that performs image processing on multiple read image data obtained by reading the same object in lines along main scanning directions that extend in different directions, and the image processing program causes a computer to execute a spectrum generation step, a comparison step, a synthetic spectrum generation step, and an image generation step. The spectrum generation step generates multiple spectral data by performing Fourier transform processing on each of the multiple read image data. The comparison step compares each component corresponding to the same frequency of the multiple spectral data. The synthetic spectrum generation processing step generates synthetic spectral data by selecting one of the components corresponding to the same frequency of the multiple spectral data based on the comparison result of the comparison step. The image generation step generates output image data by performing inverse Fourier transform processing on the synthetic spectral data.
このような構成によれば、対象物に対応する領域の輪郭が鮮明な出力画像データを生成することが可能な画像処理プログラムを提供できる。 With this configuration, it is possible to provide an image processing program capable of generating output image data with clear contours of the area corresponding to the object.
本発明によれば、ライン状に対象物を読み取ることにより得られる、複数の読取画像データに画像処理を施すことで、対象物に対応する領域の輪郭が鮮明な出力画像データを生成することができる。 According to the present invention, by applying image processing to multiple scanned image data obtained by scanning an object in a line, it is possible to generate output image data with clear contours of the area corresponding to the object.
1.第1実施形態
図1は、第1実施形態の画像読取装置10の電気的構成の一例を示すブロック図である。図1に示すように、画像読取装置10は、制御部20及び画像読取部28を含み、これらの各々は、バス30を介して電気的に接続される。
1. First embodiment Fig. 1 is a block diagram showing an example of an electrical configuration of an
また、制御部20は、CPU(Central Processing Unit)22、RAM(Random Access Memory)24及び記憶部26を含む。
The
CPU22は、画像読取装置10の全体的な制御を司る。RAM24は、CPU22のワーク領域およびバッファ領域として用いられる。The
記憶部26は、画像読取装置10の主記憶装置であって、HDD(Hard Disk Drive)およびEEPROM(Electrically Erasable Programmable Read Only Memory)のような不揮発性メモリが用いられる。また、記憶部26が、RAM24を含むように構成されてもよい。The
記憶部26には、CPU22が画像読取装置10の各コンポーネントの動作を制御するための制御プログラムについてのデータ、各種画像についてのデータ及び制御プログラムの実行に必要な実行用データ等が記憶される。The
画像読取部28は、少なくともイメージセンサを含み、副走査方向に走査しながら、主走査方向に沿ってライン状に対象物を読み取る。なお、イメージセンサは、光を光電変換により電気出力として画像を読取るためのセンサである。The
イメージセンサは、副走査方向に走査しながら、主走査方向に沿ってライン状に対象物を読み取ることが可能であれば、種類及び数は特に限定されない。 There is no particular limit to the type or number of image sensors, as long as they are capable of reading an object in a line along the main scanning direction while scanning in the sub-scanning direction.
画像読取部28としては、たとえば、汎用のラインセンサ、汎用のカメラ又はCIS(Contact Image Sensor)などが利用可能である。第1実施形態では、画像読取部28として、CISを用いた場合を例に挙げて説明する。As the
なお、エリアカメラなどの汎用のカメラ、すなわち、エリアセンサを備えるカメラを画像読取部28として用いる場合、エリアセンサの一列だけを用いる。カメラの視野角は、狭い方が好ましい。さらに、光源の出射幅及び出射角度についても、狭い方が好ましい。さらにまた、光源の出射角度は、0に近い方が好ましい。
When a general-purpose camera such as an area camera, i.e., a camera equipped with an area sensor, is used as the
なお、第1実施形態の画像読取装置10の電気的構成は一例である。たとえば、画像読取装置10に、複数の画像読取部28が設けられてもよい。Note that the electrical configuration of the
図2は、第1実施形態の画像読取部28の一例を示す断面図である。図3は、第1実施形態の画像読取部28におけるライン状光源44(44A、44B)の外観の一例を概略的に示す分解斜視図である。図2に示すように、画像読取部28は、焦点面40を挟んで対向配置される2つの筐体42(42A、42B)及び筐体42に設けられる各種コンポーネントを含む。
Figure 2 is a cross-sectional view showing an example of the
各筐体42内には、焦点面40上にある物体を照明するためのライン状光源44(44A、44B)が設けられている。ライン状光源44は、焦点面40にある読取対象(検査対象)Tに向けて光を出射するコンポーネントである。図2において、ライン状光源44Aから焦点面40に向けて出射される光をL1で示し、ライン状光源44Bから焦点面40に向けて出射される光をL2で示す。Each
また、図3に示すように、ライン状光源44は、長手方向Dに沿って延びる透明な導光体46と、長手方向Dの一方の端面に設けられた第1光源部48と、長手方向Dの他方の端面に設けられた第2光源部50と、導光体46の外側の各側面を保持するためのカバー部材51とを含む。なお、ライン状光源44は、導光体46で光をガイドするようなガイド式に限らない。また、図3では、第1光源部48及び第2光源部50は、導光体46から離間して図示される。3, the
さらに、ライン状光源44は、光拡散パターンPを有している。光拡散パターンPは、導光体46の底面52において、長手方向Dに沿って延びるように形成される。第1光源部48及び第2光源部50から導光体46に光が入射されると、光拡散パターンPは、その導光体46の中を進む光を拡散・屈折させて、導光体46の光出射側面54から出射させる。Furthermore, the linear
なお、光出射側面54は、レンズの集光効果を持たせるために外向きに滑らかな凸の曲線状に形成されている。In addition, the light
また、図2に示すように、筐体42Aには、ライン状光源44Aを固定するための基板56が設けられ、筐体42Bには、ライン状光源44Bを固定するための基板58Bが設けられる。
Also, as shown in FIG. 2, a
図3に示すように、第1光源部48及び第2光源部50には、端子60が設けられている。ライン状光源44Aは、端子60が基板56に差し込まれ、半田付けされることで、その基板56に固定される。また、ライン状光源44Bは、端子60が基板58Bに差し込まれ、半田付けされることで、その基板58Bに固定される。3, the first
また、図2に示すように、筐体42A内には、レンズアレイ62が設けられる。レンズアレイ62は、読取対象Tで反射又は透過された光を後述する受光部64に結像する光学素子であり、セルフォックレンズアレイ(登録商標:日本板硝子製)などのロッドレンズアレイを用いることができる。2, a
さらに、焦点面40から受光部64までの任意の位置には、受光部64に紫外光が入射するのを阻止する紫外光遮断フィルタ(UVカットフィルタ)67が設けられている。また、受光部64と紫外光遮断フィルタ67との間には、特定波長範囲の可視光を通過させるカラーフィルタ68が設けられている。Furthermore, an ultraviolet light blocking filter (UV cut filter) 67 that blocks ultraviolet light from entering the
受光部64は、イメージセンサを含み、筐体42A内において、基板58Aに実装されている。また、各筐体42には、使用中のごみの飛散や傷つきからライン状光源44を保護するために保護ガラス66(66A、66B)が設けられる。The
このように構成される画像読取部28では、ライン状光源44Aから出射された光L1は、ライン状の照明光となって読取対象Tを照明し、読取対象Tからの反射光が受光部64に導かれる。また、ライン状光源44Bから出射された光L2は、ライン状の照明光となって読取対象Tを透過し、読取対象Tを透過した透過光が受光部64に導かれる。読取対象Tとしては、食品を例示することができるが、これに限られるものではない。たとえば、読取対象Tとしては、食品(固形物、液状物などの他、密度(パンや油等)、色(ケチャップやカレー等)又は形状(麺類等)が特徴的なものであっても、品目は問わない。)、フィルム又はシートのような樹脂成形物、布生地、衣服又は不織布のような繊維製品、枚葉、ロール又は構造体(封筒又は箱)のような紙製品などが挙げられる。読取対象T自体が対象物であってもよいし、読取対象Tに内包される、混合される、あるいは覆われるなどの状態で同時に読み取られる部分が対象物であってもよい。当該部分としては、金属片、樹脂片(プラスチック又はゴムなど)、鉱物片(石又は砂など)、動植物片(枝葉、骨又は虫など)、それらの複合物の他、読取対象Tの内部における構造的欠陥(キズ、凹凸、気泡又は付着した異物など)を例示できる。In the
したがって、画像読取部28では、たとえば、副走査方向(図2におけるX方向)に走査しながら、主走査方向(図2におけるY方向)に沿ってライン状に読取対象Tを読み取ることができる。ただし、ライン状光源44Aが省略されることにより、読取対象Tからの透過光のみが受光部64で受光されるような構成であってもよい。Therefore, the
また、図示は省略するが、基板58(58A、58B)上には、制御部20と電気的に接続するための構成、たとえば、コネクタ等が設けられる。
Although not shown in the figure, a structure for electrically connecting to the
第1実施形態では、画像読取部28を用いて、同一の対象物に対して、それぞれ異なる方向に延びる主走査方向に沿ってライン状に対象物を読み取ることで、複数の読取画像データが生成される。例えば、固定された画像読取部28の焦点面40上で、Y方向と交差する異なる複数の方向に対象物を搬送しながら、各搬送時の対象物を主走査方向に沿って読み取れば、同一の対象物に対してそれぞれ異なる方向に延びる主走査方向に沿って対象物を読み取ることができる。また、焦点面40上で停止している対象物に対して、画像読取部28を移動させてもよい。In the first embodiment, the
なお、本明細書では、画像データは、データ形式である画像を指す。したがって、本明細書では、たとえば、読取画像データを読取画像と記述する場合もあり、読取画像を読取画像データを記述する場合もある。このことは、後述するスペクトルについても同様である。In this specification, image data refers to an image in a data format. Therefore, in this specification, for example, read image data may be described as a read image, and a read image may be described as read image data. This also applies to spectra, which will be described later.
第1実施形態では、複数の読取画像データが生成されると、複数の読取画像データのそれぞれに対して、フーリエ変換処理が施される。また、複数の読取画像データのそれぞれに対して、フーリエ変換処理が施されると、複数のスペクトルデータが生成される。In the first embodiment, when multiple pieces of read image data are generated, a Fourier transform process is performed on each of the multiple pieces of read image data. In addition, when a Fourier transform process is performed on each of the multiple pieces of read image data, multiple pieces of spectral data are generated.
具体的に、フーリエ変換処理では、読取画像に対して2次元フーリエ変換が行われる。また、スペクトルデータは、データ形式の周波数スペクトルである。周波数スペクトルは、周波数ごとに対応する成分を有するスペクトルである。また、周波数スペクトルは、具体的に、空間周波数スペクトルである。 Specifically, in the Fourier transform process, a two-dimensional Fourier transform is performed on the scanned image. Furthermore, the spectral data is a frequency spectrum in a data format. A frequency spectrum is a spectrum having components corresponding to each frequency. Furthermore, specifically, the frequency spectrum is a spatial frequency spectrum.
第1実施形態では、周波数スペクトルは、振幅スペクトル、位相スペクトル及びパワースペクトルのいずれかに対応する。たとえば、周波数スペクトルが、振幅スペクトルに対応するのであれば、周波数に対応する成分は、振幅の大きさを示す。周波数スペクトルとしては、振幅スペクトルが用いられるのが好ましい。In the first embodiment, the frequency spectrum corresponds to any one of an amplitude spectrum, a phase spectrum, and a power spectrum. For example, if the frequency spectrum corresponds to an amplitude spectrum, the component corresponding to the frequency indicates the magnitude of the amplitude. It is preferable to use an amplitude spectrum as the frequency spectrum.
第1実施形態では、複数のスペクトルデータが生成されると、各スペクトルデータ同士が比較される。具体的には、複数のスペクトルデータの同一周波数に対応する各成分同士が比較される。In the first embodiment, when multiple pieces of spectral data are generated, the pieces of spectral data are compared with each other. Specifically, components corresponding to the same frequency in the multiple pieces of spectral data are compared with each other.
同一周波数に対応する各成分同士が比較されると、その比較結果に基づき、複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分が合成用成分として選択される。第1実施形態では、複数のスペクトルデータの同一周波数に対応する各成分の中から最も大きい成分が合成用成分として選択される。When the components corresponding to the same frequency are compared, one of the components corresponding to the same frequency in the multiple spectral data is selected as the component to be combined based on the comparison result. In the first embodiment, the largest component among the components corresponding to the same frequency in the multiple spectral data is selected as the component to be combined.
また、各周波数に対応する成分として合成用成分が選択されると、それらの合成用成分に基づいて合成スペクトルデータが生成される。合成スペクトルデータは、データ形式の合成スペクトルである。また、合成スペクトルは、各周波数に対応する成分が合成用成分とされるスペクトルである。 When synthesis components are selected as components corresponding to each frequency, synthetic spectrum data is generated based on those synthesis components. The synthetic spectrum data is a synthetic spectrum in data format. The synthetic spectrum is a spectrum in which the components corresponding to each frequency are used as synthesis components.
第1実施形態では、合成スペクトルデータが生成されると、その合成スペクトルデータに対して、逆フーリエ変換処理が施される。また、合成スペクトルデータに逆フーリエ変換処理が施されると、出力画像データが生成される。なお、逆フーリエ変換処理では、合成スペクトルデータに対して2次元逆フーリエ変換が施される。In the first embodiment, when the synthetic spectral data is generated, an inverse Fourier transform process is performed on the synthetic spectral data. When the synthetic spectral data is subjected to an inverse Fourier transform process, output image data is generated. Note that in the inverse Fourier transform process, a two-dimensional inverse Fourier transform is performed on the synthetic spectral data.
図4は、第1実施形態の読取画像の一例を示す図である。図5は、第1実施形態の読取画像の他の例を示す図である。また、図4及び図5が示す読取画像は、同じ読取対象Tをライン状に読み取ることで生成される画像である。さらに、図4及び図5が示す読取画像が生成される際は、画像読取部28の主走査向及び副走査方向は直交する。さらにまた、図4が示す読取画像が生成される際の画像読取部28の副走査方向は、図5が示す読取画像が生成される際の画像読取部28の副走査方向と直交する。具体的に、図4では、上下方向が主走査方向、左右方向が副走査方向であり、図5では、左右方向が主走査方向、上下方向が副走査方向である。
Figure 4 is a diagram showing an example of a read image in the first embodiment. Figure 5 is a diagram showing another example of a read image in the first embodiment. The read images shown in Figures 4 and 5 are images generated by reading the same read object T in a line. Furthermore, when the read images shown in Figures 4 and 5 are generated, the main scanning direction and the sub-scanning direction of the
図4及び図5に示す読取画像が生成される際、対象物を走査する環境、具体的には、主走査方向が異なるため、これらの読取画像では、画像上の対象物に対応する領域である対象領域の輪郭において、ぼける部分が異なる。すなわち、対象領域の輪郭において、鮮明な部分が異なる。 When the scanned images shown in Figures 4 and 5 are generated, the environment in which the object is scanned, specifically the main scanning direction, is different, so that in these scanned images, the blurred parts of the contour of the object area, which is the area on the image that corresponds to the object, are different. In other words, the clear parts of the contour of the object area are different.
なお、対象領域は、具体的に、画像上で対象物を構成する画素の領域である。すなわち、対象領域は、画像上の対象物ともいえる。The target area is specifically the area of pixels that make up the object on the image. In other words, the target area can also be said to be the object on the image.
図6は、第1実施形態の出力画像の一例を示す図である。また、図6における出力画像は、図4及び図5が示す読取画像に対応する画像である。出力画像では、対象領域は、各読取画像における対象領域の鮮明な部分を組み合わせたように表示される。すなわち、出力画像では、対象領域の輪郭が鮮明に表示される。 Figure 6 is a diagram showing an example of an output image in the first embodiment. The output image in Figure 6 is an image corresponding to the read images shown in Figures 4 and 5. In the output image, the target area is displayed as if it were a combination of the clear parts of the target area in each read image. In other words, the contour of the target area is displayed clearly in the output image.
なお、図6では、2枚の読取画像に対応する出力画像を例に挙げているが、読取画像の枚数が多いほど、出力画像において、対象領域の輪郭の全体がより鮮明に表示される。Note that Figure 6 shows an example of an output image corresponding to two scanned images, but the more scanned images there are, the clearer the entire contour of the target area will be displayed in the output image.
第1実施形態では、たとえば、gθを対象領域の輪郭が不鮮明な読取画像データとした場合、gθは下記式(1)で表される。fは、対象領域の輪郭が鮮明な読取画像データである。hθは、PSF(Point Spread Function)である。つまり、hθは、対象領域の輪郭のぼけに起因する要素である。また、PSFは、主走査方向の角度に依存する。

式(1)に対して、式(2)に示すように、両辺にフーリエ変換処理を適用すると、式(3)が導き出される。したがって、式(3)において、Gθ、F、Hθは、フーリエ変換処理が施されたgθ、f、hθである。すなわち、Gθはスペクトルデータである。


また、上述したように、合成スペクトルデータが生成される際は、複数のスペクトルデータの同一周波数に対応する各成分の中から最も大きい成分が選択される。したがって、合成スペクトルデータが生成される際は、式(4)に従って生成される。つまり、式(4)において、左辺は合成スペクトルデータであり、右辺は、各合成用成分である。

合成スペクトルデータには、逆フーリエ変換処理が施されるため、式(4)に対して、式(5)に示すように逆フーリエ変換処理が適用される。すなわち、式(5)において、左辺は、出力画像データである。

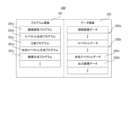
図7は、第1実施形態のRAM24のメモリマップ200の一例を示す図である。図7に示すようにRAM24は、プログラム領域201およびデータ領域202を含み、プログラム領域201には、記憶部26から予め読み出された制御プログラムが記憶される。
Figure 7 is a diagram showing an example of a
制御プログラムは、画像読取プログラム201a、スペクトル生成プログラム201b、比較プログラム201c、合成スペクトル生成プログラム201d及び画像生成プログラム201e等を含む。
The control programs include an
画像読取プログラム201aは、画像読取部28を制御して読取画像データ202aを生成するためのプログラムである。
The
スペクトル生成プログラム201bは、画像読取プログラム201aによって生成される読取画像データ202aに対して、フーリエ変換処理を施すことで、スペクトルデータ202bを生成するためのプログラムである。The
比較プログラム201cは、スペクトル生成プログラム201bによって生成される複数のスペクトルデータ202bの同一周波数に対応する各成分同士を比較するためのプログラムである。The
合成スペクトル生成プログラム201dは、比較プログラム201cによる比較結果に基づき、複数のスペクトルデータ202bの同一周波数に対応する各成分の中から最も大きい成分を選択し、合成スペクトルデータ202cを生成するためのプログラムである。The synthetic
画像生成プログラム201eは、合成スペクトルデータ202cに対して、逆フーリエ変換処理を施すことで、出力画像データ202dを生成するためのプログラムである。
The
なお、図示は省略するが、プログラム領域201には、画像読取プログラム201a及びスペクトル生成プログラム201b等以外の制御プログラムも記憶される。Although not shown in the figure, the
データ領域202には、予め記憶部26から読み出されたデータが記憶される。図7に示す例では、データ領域202には、読取画像データ202a、スペクトルデータ202b、合成スペクトルデータ202c及び出力画像データ202d等が記憶される。The
読取画像データ202aは、読取画像に対応するデータである。また、データ領域202には、複数の読取画像データ202aが記憶されることがある。The read
スペクトルデータ202bは、周波数スペクトルに対応するデータである。また、データ領域202には、複数のスペクトルデータ202bが記憶されることがある。The
合成スペクトルデータ202cは、合成スペクトルに対応するデータである。出力画像データ202dは、出力画像に対応するデータである。The
また、データ領域202には、たとえば、実行用データが記憶されたり、制御プログラムの実行に必要なタイマ(カウンタ)およびレジスタが設けられたりする。
In addition, the
図8は、第1実施形態の画像読取装置10の機能的構成の一例を示すブロック図である。CPU22を含む制御部20において、CPU22が画像読取プログラム201aを実行することで、制御部20が画像読取部28を制御して読取画像データ202aを生成する画像読取処理部90として機能する。8 is a block diagram showing an example of the functional configuration of the
また、CPU22がスペクトル生成プログラム201bを実行することで、制御部20が読取画像データ202aに対して、フーリエ変換処理を施し、スペクトルデータ202bを生成するスペクトル生成処理部92として機能する。
In addition, when the
さらに、CPU22が比較プログラム201cを実行することで、制御部20が複数のスペクトルデータ202bの同一周波数に対応する各成分同士を比較する比較処理部94として機能する。
Furthermore, when the
さらにまた、CPU22が合成スペクトル生成プログラム201dを実行することで、制御部20が、比較処理部94の比較結果に基づき、複数のスペクトルデータ202bの同一周波数に対応する各成分の中から最も大きい成分を選択し、合成スペクトルデータを生成する合成スペクトル生成処理部96として機能する。Furthermore, when the
また、CPU22が画像生成プログラム201eを実行することで、制御部20が合成スペクトルデータ202cに対して、逆フーリエ変換処理を施し、出力画像データ202dを生成する画像生成処理部98として機能する。
In addition, when the
図8に示す例では、たとえば、画像読取処理部90によって複数の読取画像データ202aが生成されるとき、スペクトル生成処理部92によって、複数のスペクトルデータ202bが生成される。また、複数のスペクトルデータ202bが生成されると、比較処理部94によって、複数のスペクトルデータ202bの同一周波数に対応する各成分同士が比較され、合成スペクトル生成処理部96では、比較処理部94の比較結果に基づき、複数のスペクトルデータ202bの同一周波数に対応する各成分の中から最も大きい成分が選択され、合成スペクトルデータ202cが生成される。さらに、合成スペクトルデータ202cが生成されると、画像生成処理部98によって、出力画像データ202dが生成される。In the example shown in FIG. 8, for example, when the image
図9は、第1実施形態の画像読取装置10のCPU22の画像処理の一例を示すフロー図である。CPU22は、たとえば、複数の読取画像データ202aが生成されると、画像処理を開始する。
Figure 9 is a flow diagram showing an example of image processing by the
ステップS1では、各読取画像データ202aに対して、フーリエ変換処理を行い、複数のスペクトルデータ202bを生成する。In step S1, Fourier transform processing is performed on each scanned
ステップS2では、複数のスペクトルデータ202bの同一周波数に対応する各成分同士を比較する。In step S2, each component corresponding to the same frequency in the multiple
ステップS3では、同一周波数に対応する各成分の比較結果に基づき、複数のスペクトルデータ202bの同一周波数に対応する各成分の中から最も大きい成分を選択し、合成スペクトルデータ202cを生成する。In step S3, based on the comparison results of each component corresponding to the same frequency, the largest component is selected from among the components corresponding to the same frequency in the multiple
ステップS4では、合成スペクトルデータ202cに対して、逆フーリエ変換処理を施し、出力画像データ202dを生成する。また、ステップS4で、出力画像データ202dが生成されると、画像処理が終了する。In step S4, an inverse Fourier transform process is performed on the
第1実施形態によれば、対象領域の輪郭が鮮明な出力画像データを生成することができる。 According to the first embodiment, output image data with clear contours of the target area can be generated.
また、第1実施形態によれば、読取画像データの数が多いほど、対象領域の輪郭がより鮮明な出力画像データが生成されると思われる。 Furthermore, according to the first embodiment, it is believed that the greater the number of read image data, the clearer the contours of the target area will be in the output image data that is generated.
なお、複数のスペクトルデータの同一周波数に対応する各成分の中から最も大きい成分が合成用成分として選択されるような構成に限らず、合成用成分が適宜に選択されてもよい。 In addition, the configuration is not limited to one in which the largest component is selected as the component to be combined from among the components corresponding to the same frequency of multiple spectral data, and the component to be combined may be selected as appropriate.
たとえば、複数のスペクトルデータのうち、一部の周波数に対応する成分については、最も大きい成分が合成用成分として選択され、他の周波数に対応する成分については、適宜に合成用成分が選択されてもよい。For example, among the multiple spectral data, for components corresponding to some frequencies, the largest component may be selected as the component to be synthesized, and for components corresponding to other frequencies, an appropriate component to be synthesized may be selected.
さらに、複数のスペクトルデータの同一周波数に対応する各成分の中から合成用成分が選択される際、最も小さい成分及び最も大きい成分の間の任意の成分を合成用成分としてもよい。 Furthermore, when a component to be combined is selected from each component corresponding to the same frequency of multiple spectral data, any component between the smallest component and the largest component may be selected as the component to be combined.
2.第2実施形態
第2実施形態では、複数の画像読取部28を用いて対象物を読み取る。また、第2実施形態では、複数の読取画像データに対してフーリエ変換処理が施される前に、各読取画像データにおいて、対象領域を略同一に位置させるための処理を施す。なお、フーリエ変換処理以降の一連の処理は、第1実施形態と同様であるため、重複する説明は省略する。
2. Second embodiment In the second embodiment, a target object is read using a plurality of
第2実施形態では、複数の画像読取部28の主走査方向が互いに交差するように配置される。また、各画像読取部28は、主走査方向が副走査方向に対して所定の角度で交差するように配置される。ただし、第2実施形態における各画像読取部28の副走査方向(対象物の搬送方向、又は、各画像読取部28の移動方向)は、同一の方向であり、かつ、全ての画像読取部28と交差する方向である。In the second embodiment, the main scanning directions of the multiple
図10は、第2実施形態の複数の画像読取部28の周辺の一例を示す概略図である。なお、図10は、焦点面40と直交する方向から見た場合の複数の画像読取部28の周辺の一例を示す概略図でもある。
Figure 10 is a schematic diagram showing an example of the periphery of the multiple
図10に示す例では、画像読取部28A及び画像読取部28Bの主走査方向が互いに直交し、かつ、画像読取部28A及び画像読取部28Bが、副走査方向に対して主走査方向が45°の角度で交差するように配置される。すなわち、図10に示す例では、各画像読取部28の主走査方向及び副走査方向は、直交しない。In the example shown in Figure 10, the main scanning directions of
また、各画像読取部28の副走査方向は、同一の方向であり、かつ、各画像読取部28の副走査方向は、画像読取部28A及び画像読取部28Bと交差する。ただし、画像読取部28の副走査方向と主走査方向が成す角度は、45°に限らない。また、画像読取部28の主走査方向同士が成す角度は、90°に限らない。In addition, the sub-scanning direction of each
また、第2実施形態では、複数の画像読取部28は、主走査方向が副走査方向に対してそれぞれ異なる方向に延び、かつ、互いの主走査方向が1点で交差するように配置されるともいえる。
In addition, in the second embodiment, the multiple
第2実施形態では、主走査方向及び副走査方向が直交しない画像読取部28に基づいて、読取画像データが生成されるため、対象領域が傾く読取画像データが生成される。In the second embodiment, read image data is generated based on an
第2実施形態では、複数の読取画像データのそれぞれにおける画像上で対象領域が略同一に位置されるように、フーリエ変換処理が施される前の複数の読取画像データに対して、補正処理を施す。In the second embodiment, a correction process is performed on multiple read image data before Fourier transform processing is performed, so that the target area is positioned approximately identically on the image in each of the multiple read image data.
補正処理は、対象領域の傾きを補正する傾き補正処理及び対象領域の倍率を補正する倍率補正処理を含み、たとえば、傾き補正処理、倍率補正処理の順に行われる。補正処理については、図11を参照して説明する。図11は、第2実施形態の補正処理の一例を説明するための図である。また、図11は、画像読取部28Aに対応する読取画像、画像読取部28Bに対応する読取画像を示す。なお、補正処理では、初めに、読取画像が走査され、画素の座標が取得される。The correction process includes a tilt correction process for correcting the tilt of the target area and a magnification correction process for correcting the magnification of the target area, and is performed, for example, in the order of tilt correction process and magnification correction process. The correction process will be described with reference to FIG. 11. FIG. 11 is a diagram for explaining an example of the correction process of the second embodiment. FIG. 11 also shows a read image corresponding to image
対象領域は、対象物を読み取る際の画像読取部28と対象物との相対的な速度に応じた角度で傾く。上記相対的な速度が速いほど、対象領域の傾きは大きくなる。The target area is tilted at an angle that corresponds to the relative speed between the
傾き補正処理では、画素の座標に基づいて対象領域の傾きを算出し、その傾きに従って、画素が上下方向にシフトされる。このように、傾き補正処理では、画素のシフトに伴って対象領域の傾きが補正される。なお、画素の座標から、対象領域の傾きを算出する方法としては、周知の方法を用いる。 In the tilt correction process, the tilt of the target area is calculated based on the pixel coordinates, and the pixels are shifted vertically according to that tilt. In this way, in the tilt correction process, the tilt of the target area is corrected as the pixels are shifted. Note that a well-known method is used to calculate the tilt of the target area from the pixel coordinates.
倍率補正処理では、対象領域を左右方向に縮小する。また、対象領域を縮小する際の倍率である補正倍率は、各読取画像上において、対象領域が略同一に位置されるのであれば、特に限定されない。たとえば、補正倍率は、傾き補正前の対象領域の傾きに基づいて、設定されてもよい。なお、対象領域の倍率の調整に伴う画素の補間等は、周知であるため、詳細な説明は省略する。ただし、倍率補正処理では、対象領域を縮小するのではなく、拡大してもよい。In the magnification correction process, the target area is reduced in the left-right direction. The correction magnification, which is the magnification by which the target area is reduced, is not particularly limited as long as the target area is positioned approximately the same on each read image. For example, the correction magnification may be set based on the inclination of the target area before inclination correction. Note that pixel interpolation and the like associated with adjusting the magnification of the target area are well known, so a detailed explanation will be omitted. However, in the magnification correction process, the target area may be enlarged rather than reduced.
また、傾き補正処理だけでも、各読取画像データにおいて、対象領域を略同一に位置させることができるため、倍率補正処理については、行われなくても良い。つまり、補正処理では、傾き補正処理及び倍率補正処理のうち、少なくとも傾き補正処理が行われてもよい。 In addition, since the target area can be positioned approximately identically in each scanned image data by just the tilt correction process, the magnification correction process does not need to be performed. In other words, in the correction process, at least the tilt correction process may be performed out of the tilt correction process and the magnification correction process.
さらに、補正処理では、周知の方法を用いて、対象領域の傾き及び倍率のうち、少なくとも傾きを補正してもよい。たとえば、補正処理では、画像上における文字、図形、イラスト等のオブジェクトを構成する画素の位置(座標)に基づいて、そのオブジェクトの傾き及び倍率を補正する周知の方法が用いられてもよい。 In addition, the correction process may use a known method to correct at least the tilt of the target area. For example, the correction process may use a known method to correct the tilt and magnification of an object, such as a character, figure, or illustration, based on the positions (coordinates) of pixels that make up the object on the image.
さらに、第2実施形態では、画像読取部28A及び画像読取部28Bの主走査方向が互いに直交して配置される場合を例に挙げて説明したが、複数の画像読取部28は、主走査方向が副走査方向に対してそれぞれ異なる方向に延び、かつ、互いの主走査方向が1点で交差するのであれば、画像読取部28の数は3つ以上でもよい。また、画像読取部28を配置する際の角度及び数によっては、補正処理が施される読取画像データは、少なくとも1つでよい。Furthermore, in the second embodiment, the main scanning directions of
図12は、第2実施形態のRAM24のメモリマップ200の一例を示す図である。第2実施形態では、制御プログラムは、補正プログラム201fを含む。また、補正プログラム201fは、傾き補正プログラム201g及び倍率補正プログラム201hを含む。
Figure 12 is a diagram showing an example of a
補正プログラム201fは、画像読取プログラム201aによって生成される読取画像データ202aに補正処理を施し、補正画像データ202eを生成するためのプログラムである。The
傾き補正プログラム202gは、画像読取プログラム201aによって生成される読取画像データ202aに傾き補正処理を施すためのプログラムである。倍率補正プログラム201hは、画像読取プログラム201aによって生成される読取画像データ202aに倍率補正処理を施すためのプログラムである。The tilt correction program 202g is a program for performing tilt correction processing on the read
また、第2実施形態では、データ領域202に補正画像データ202eが記憶される。補正画像データ202eは、補正処理が施された読取画像である補正画像に対応するデータである。なお、補正画像データ202eは、補正画像に対応するデータを複数含むことがある。In the second embodiment,
さらに、第2実施形態では、スペクトル生成プログラム201bは、画像読取プログラム201aによって生成される読取画像データ202a、具体的には、補正画像データ202eに対して、フーリエ変換処理を施すことで、スペクトルデータ202bを生成するためのプログラムである。
Furthermore, in the second embodiment, the
図13は、第2実施形態の画像読取装置10の機能的構成の一例を示すブロック図である。第2実施形態では、CPU22が補正プログラム201fを実行することで、読取画像データ202aに補正処理を施し、補正画像データ202eを生成する補正処理部100として機能する。また、第2実施形態では、CPU22がスペクトル生成プログラム201bを実行することで、補正画像データ202eに対して、フーリエ変換処理を施し、スペクトルデータ202bを生成するスペクトル生成処理部92として機能する。
Figure 13 is a block diagram showing an example of the functional configuration of the
図14は、第2実施形態の画像読取装置10のCPU22の画像処理の一例を示すフロー図である。第2実施形態では、複数の読取画像データ202aが生成されると、ステップS1で、複数の補正画像データ202eを生成する。なお、ステップS2~ステップS5については、図9に示すフロー図のステップS1~ステップS4に相当するため、重複する説明は省略する。
Figure 14 is a flow diagram showing an example of image processing by the
第2実施形態では、上述したように、画像読取部28の数は3つ以上でもよく、画像読取部28を配置する際の角度及び数によっては、補正処理が施される読取画像データは、少なくとも1つでよい。したがって、第2実施形態によれば、複数の読取画像データのうち、少なくとも一部の読取画像データにおいて対象領域が傾いていても、各読取画像データにおいて対象領域を略同一に位置させることができる。すなわち、画像読取部28を主走査方向及び副走査方向が直交しないように配置することができる。In the second embodiment, as described above, the number of
また、第2実施形態によれば、対象物又は複数の画像読取部28が副走査方向に移動するだけで、つまり、一度の動作だけで複数の読取画像データを生成することができる。したがって、第2実施形態によれば、効率よく複数の読取画像データを得ることできる。ただし、この場合、各画像読取部28の主走査方向及び副走査方向は直交しない。Furthermore, according to the second embodiment, multiple read image data can be generated simply by moving the object or multiple
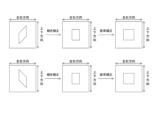
なお、第2実施形態では、図15~図19に示すように、複数の画像読取部28は、副走査方向に対して交差する方向に並べて配置されてもよい。具体的には、主走査方向が副走査方向に対してそれぞれ異なる方向に延び、かつ、副走査方向に並べて配置される画像読取部28の一群は、副走査方向に対して直交する方向に並べて配置されてもよい。In the second embodiment, the multiple
図15~図19は、第2実施形態の画像読取部28の配置を説明するための概略図である。図15に示す例では、画像読取部28A及び画像読取部28Bは、主走査方向が互いに直交し、かつ、副走査方向に対して主走査方向が45°の角度で交差するように配置される。また、画像読取部28A及び画像読取部28Bは、副走査方向と直交する方向を軸(対称軸)として、対称に配置されている。さらに、画像読取部28C及び画像読取部28Dについては、画像読取部28A及び画像読取部28Bと同様に配置されている。
Figures 15 to 19 are schematic diagrams for explaining the arrangement of
また、画像読取部28A及び画像読取部28Bに係る対称軸は、画像読取部28C及び画像読取部28Dに係る対称軸と同一である。画像読取部28C及び画像読取部28Dを含む一群は、副走査方向と直交する方向において、画像読取部28A及び画像読取部28Bを含む一群と並べて配置される。
In addition, the axis of symmetry for
なお、図15に示す例では、画像読取部28A及び画像読取部28Cは、互いの主走査方向が平行となるように配置され、さらに、副走査方向において互いの一部が重なるように配置される。このことは、画像読取部28B及び画像読取部28Dについても同様である。In the example shown in Fig. 15,
図16に示す例では、図15に示す例と異なり、画像読取部28A及び画像読取部28Cは、互いの主走査方向が交差するように配置され、さらに、副走査方向を軸として対称となるように配置される。つまり、画像読取部28A及び画像読取部28Cは、副走査方向において互いの一部が重ならない。このことは、画像読取部28B及び画像読取部28Dについても同様である。
In the example shown in Figure 16, unlike the example shown in Figure 15,
図17に示す例では、図16に示す例と異なり、画像読取部28A及び画像読取部28Bに係る対称軸は、画像読取部28C及び画像読取部28Dに係る対称軸と異なる。つまり、画像読取部28A及び画像読取部28Cは、非対称とされ、画像読取部28B及び画像読取部28Dについても非対称とされる。また、画像読取部28A及び画像読取部28Cは、副走査方向において互いの一部が重なる。このことは、画像読取部28B及び画像読取部28Dについても同様である。
In the example shown in Figure 17, unlike the example shown in Figure 16, the axis of symmetry for
図18に示す例では、図16に示す例と異なり、画像読取部28A及び画像読取部28Cは、非対称であり、副走査方向において互いの一部が重なる。このことは、画像読取部28B及び画像読取部28Dについても同様である。In the example shown in Figure 18, unlike the example shown in Figure 16,
図19に示す例では、図16に示す例と異なり、主走査方向が副走査方向と直交する画像読取部28Eが設けられる。画像読取部28Eは、画像読取部28A及び画像読取部28Bに係る対称軸に沿って設けられる。図19に示す例では、画像読取部28A及び画像読取部28Bは、副走査方向に対して主走査方向が60°の角度で交差するように配置される。画像読取部28C及び画像読取部28Dについても同様に、副走査方向に対して主走査方向が60°の角度で交差するように配置される。これにより、画像読取部28A、画像読取部28C及び画像読取部28Eは、互いに正三角形状に配置され、画像読取部28B、画像読取部28D及び画像読取部28Eも同様に、互いに正三角形状に配置される。
In the example shown in FIG. 19, unlike the example shown in FIG. 16, an
図15~図19の例のように、画像読取部28の一群が、副走査方向に対して交差する方向に並べて配置される場合、各画像読取部28の主走査方向の長さが短くても、副走査方向と交差する方向に並べて配置された複数の画像読取部28で、読取対象Tを分割して読み取ることができる。
As in the examples of Figures 15 to 19, when a group of
これにより、副走査方向における画像読取部28の配置領域を狭めて、省スペース化することができる。特に、図15~図19の例では、各画像読取部28が同じ長さであり、同一の画像読取部28を複数用意して適切に配置するだけでよいため、低コストで省スペース化を実現できる。なお、このように、画像読取部28の一群が、副走査方向に対して交差する方向に並べて配置される場合、必要に応じて、補正された後の読取画像が合成されてもよい。This narrows the area in the sub-scanning direction where the
なお、第1実施形態、第2実施形態では、後述する撮像素子32(32A、32B)(図21、図22参照)が画像読取部28の長手方向に対して傾斜することなく、その長手方向に並べて配置されているため、画像読取部28の主走査方向は、その画像読取部28の長手方向と一致している。In the first and second embodiments, the image pickup elements 32 (32A, 32B) (see Figures 21 and 22) described later are arranged side by side in the longitudinal direction of the
3.第3実施形態
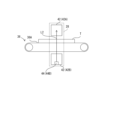
第3実施形態は、画像読取部28の構成及び配置を変更したこと以外は、第1実施形態、第2実施形態と同様である。図20は、第3実施形態の画像読取部28の配置を説明するための概略図である。図21は、第3実施形態の画像読取部28の構成を説明するための概略図である。なお、図21は、図20における画像読取部28の周辺を拡大した図でもある。
3. Third embodiment The third embodiment is similar to the first and second embodiments, except that the configuration and arrangement of the
第3実施形態では、2つの画像読取部28が用いられる。また、画像読取部28のそれぞれは、副走査方向に対して交差する長手方向に沿って長尺形状を有する。図21に示す例では、画像読取部28のそれぞれは、長手方向が副走査方向と直交するよう配置されている。In the third embodiment, two
また、第3実施形態では、2つの画像読取部28のうち一方の画像読取部28Aには、画像読取部28Aの長手方向に対して傾斜する第1撮像素子32Aが、画像読取部28Aの長手方向に並べて配置される。また、他方の画像読取部28Bには、画像読取部28Bの長手方向に対して第1撮像素子32Aと異なる角度で傾斜する第2撮像素子32Bが、画像読取部28Bの長手方向に並べて配置される。第1撮像素子32A及び第2撮像素子32Bは、それぞれ受光ICチップであり、フォトダイオードなどの光電変換素子が一直線上に複数並べて配置されることにより構成される。In the third embodiment, the
図21に示す例では、第1撮像素子32Aは、画像読取部28Aの長手方向に対して+45°の角度で傾斜し、第2撮像素子32Bは、画像読取部28Bの長手方向に対して-45°の角度で傾斜している。また、第1撮像素子32A及び第2撮像素子32Bは、副走査方向に直交する方向を軸として対称となるように配置されている。つまり、図21に示す例では、各画像読取部28の主走査方向は、直交している。21, the
このように、第1撮像素子32A及び第2撮像素子32Bを配置した場合、2つの画像読取部28を平行に配置しても、主走査方向がそれぞれ異なる2つの画像読取部28で2つの読取画像データを取得することができる。そのため、図10のように各画像読取部28の長手方向に沿って複数の第1撮像素子32A又は複数の第2撮像素子32Bを並べて配置する構成と比べて、副走査方向における各画像読取部28の配置領域を狭めて、省スペース化することができる。In this way, when the
図22は、第3実施形態の画像読取部28の構成の変形例を説明するための概略図である。この変形例では、画像読取部28が1つだけ用いられている。この場合、1つの画像読取部28における同一基板上に、画像読取部28の長手方向に並べて複数の第1撮像素子32Aが平行に配置されるとともに、画像読取部28の長手方向に並べて複数の第2撮像素子32Bが平行に配置される。
Figure 22 is a schematic diagram for explaining a modified configuration of the
図22に示す例では、第1撮像素子32Aは、画像読取部28Aの長手方向に対して+45°の角度で傾斜し、第2撮像素子32Bは、画像読取部28Bの長手方向に対して-45°の角度で傾斜している。また、第1撮像素子32A及び第2撮像素子32Bは、副走査方向に直交する方向を軸として対称となるように配置されている。したがって、図22に示す例では、画像読取部28の主走査方向は、2方向存在し、各主走査方向は、直交している。22, the
このように、1つの画像読取部28に第1撮像素子32A及び第2撮像素子32Bを配置した場合でも、図10のように各画像読取部28の長手方向に沿って複数の第1撮像素子32A又は複数の第2撮像素子32Bを並べて配置する構成と比べて、副走査方向における画像読取部28の配置領域を狭めて、省スペース化することができる。In this way, even when a first
4.第4実施形態
第4実施形態は、画像読取部28の構成を変更したこと以外は、第1実施形態、第2実施形態と同様である。つまり、第4実施形態では、画像読取部28の長手方向と主走査方向は一致する。
4. Fourth Embodiment The fourth embodiment is similar to the first and second embodiments except for a change in the configuration of the
図23は、第4実施形態の画像読取部28の一例の一部を示す断面図である。また、図23は、画像読取部28を主走査方向から見た場合の断面図である。図23に示すように、第4実施形態の画像読取部28は、スリット部材34を備える。スリット部材34は、主走査方向に延び、読取対象Tとライン状光源44Bとの間に配置される。スリット部材34には、主走査方向に沿って細長いスリットが形成されており、当該スリットを通過した光のみが読取対象Tに照射される。スリットにおける主走査方向に直交する幅は、撮像素子の各光電変換素子の幅と同程度以下であってもよい。
Figure 23 is a cross-sectional view showing an example of a portion of the
ライン状光源44Bは、LED又はハロゲンランプなどにより構成され、750nm~2500nmの近赤外域の光を出射するものであってもよい。この場合、スリット部材34は、高出力の近赤外光に耐性があり、寸法安定性に優れる材料及び形状で形成されることが好ましい。また、スリット部材34は、読取対象Tに対して、近接又は離間させる方向に移動可能であってもよい。The linear
スリット部材34によれば、主走査方向と直交する方向において、読取対象Tに照射される光L2の一部が遮られるため、読取対象Tに対する副走査方向での回り込みの光による画像上の輪郭のぼけを抑制することができる。これにより、読取対象Tに対応する領域の輪郭がより鮮明な出力画像データを生成することができる。
The
また、図示は省略するが、ライン状光源44Bとして、汎用のラインレーザ光源が用いられても良い。ラインレーザ光源は、レーザ光源及びレンズを含み、ライン状にレーザ光を照射する。ラインレーザ光源から照射されるライン状のレーザ光における主走査方向に直交する幅は、撮像素子の各光電変換素子の幅と同程度以下であってもよい。ラインレーザ光源は、750nm~2500nmの近赤外域の光を出射するものであってもよい。ラインレーザ光源としては、たとえば、テレセントリックレーザ光源が挙げられる。
Although not shown in the figure, a general-purpose line laser light source may be used as the line-shaped
ライン状光源44Bとして、ラインレーザ光源を用いた場合、主走査方向と直交する方向において、光が放射状に広がるのが抑制されるため、スリット部材34を設けた場合と同様の効果が得られる。つまり、ライン状光源44Bとしてラインレーザ光源を用いることにより、読取対象Tに対する副走査方向での回り込みの光による画像上の輪郭のぼけを抑制することができるため、部材の数を増やすことなく、読取対象Tに対応する領域の輪郭がより鮮明な出力画像データを生成することができる。When a line laser light source is used as the line
5.第5実施形態
第5実施形態では、搬送装置36の具体的構成について説明する。なお、第1実施形態、第2実施形態、第3実施形態、第4実施形態においても、画像読取装置10は搬送装置を備えているが、具体的な説明は省略した。
5. Fifth embodiment In the fifth embodiment, a specific configuration of the conveying
搬送装置36は、画像読取部28の主走査方向に対して交差する方向に延びる搬送路に沿って、読取対象Tを搬送する。第5実施形態を第4実施形態と組み合わせる場合は、搬送装置36は、画像読取部28の長手方向と交差する方向に延びる搬送路に沿って、読取対象Tを搬送する。The conveying
図24は、第5実施形態の画像読取部28の周辺の構成を説明するための概略図である。図24に示す例では、複数の搬送装置36が設けられ、これらの搬送装置36は、搬送路に沿って互いに隙間を空けて配置される。また、複数の搬送装置36は、主走査方向に対して直交する方向に延びる搬送路に沿って、読取対象Tを搬送する。搬送装置36としては、ベルトコンベアを用いられるが、これに限定されない。
Figure 24 is a schematic diagram for explaining the configuration around the
さらに、画像読取部28のライン状光源44Bは、搬送路に沿って搬送される読取対象Tに、隣接する搬送装置36間の隙間を介して光を照射する。ただし、読取対象Tが搬送装置36よりもライン状光源44B側で搬送される構成の場合には、搬送路に沿って搬送される読取対象Tに照射した光が、隣接する搬送装置36間の隙間に入射してもよい。Furthermore, the linear
このように、搬送装置36同士の間にライン状光源44Bを配置した場合、ライン状光源44Bから照射された光が、読取対象Tに到達するまでに吸収又は反射されるのを抑制することができるため、読取画像データにおいて、読取対象Tに対応する領域の輪郭がぼやけるのを防止することができる。図24の例では、搬送装置36が2つ設けられているが、3つ以上の搬送装置36を設けて、隣接する搬送装置36同士の間のそれぞれにライン状光源44Bを配置してもよい。In this way, when the linear
図25は、第5実施形態の画像読取部28の周辺の構成の変形例を説明するための概略図である。この例では、画像読取部28のライン状光源44Bから照射される光が、搬送装置36を透過する。具体的には、画像読取部28のライン状光源44Bから照射される光が、ベルトコンベアにより構成される搬送装置36のベルトを透過する。そのため、ベルトが透明な材料で形成されることにより、搬送路を形成する搬送面36Aが光透過性を有しており、ライン状光源44Bからの光が搬送面36Aを透過して読取対象Tに照射される。この場合、搬送面36Aがライン状光源44B及び読取対象Tの間に位置するように画像読取部28が配置される。
Figure 25 is a schematic diagram for explaining a modified example of the configuration around the
このように、搬送面36Aが光透過性を有するのであれば、ライン状光源44Bから照射された光が、読取対象Tに到達するまでに吸収又は反射されるのを抑制することができるため、読取画像データにおいて、読取対象Tに対応する領域の輪郭がぼやけるのを防止することができる。なお、図25では、ライン状光源44Bが搬送装置36の外側(ベルトの下側)に配置されているが、これに限らず、搬送装置36の内側(ベルトの内側)に配置されてもよい。In this way, if the conveying
さらに、上述の実施形態で挙げた具体的な構成等は一例であり、実際の製品に応じて適宜変更することが可能である。たとえば、画像読取装置10における画像読取部28を省略することにより、画像処理装置として機能してもよい。ただし、この場合、各実施形態における画像読取部28として機能することが可能な外部の画像読取部と画像処理装置が通信可能に接続される。また、たとえば、各実施形態で説明した画像読取装置10は、異物やキズ、欠陥等を検出するための検査装置として実施されてもよい。
Furthermore, the specific configurations etc. described in the above-mentioned embodiments are merely examples and can be modified as appropriate depending on the actual product. For example, the
さらにまた、上述の実施形態で示したフロー図の各ステップは、同じ結果が得られるのであれば、処理される順番は適宜変更することが可能である。Furthermore, the order in which each step in the flow chart shown in the above embodiment is processed can be changed as appropriate, provided that the same results are obtained.
なお、対象領域の輪郭が鮮明な読取画像データに対する出力画像データの類似度の評価指標として、ZNCC(Zero-mean Normalized Cross-Correlation:正規化相互相関)を用いることが可能である。 In addition, ZNCC (Zero-mean Normalized Cross-Correlation) can be used as an evaluation index for the similarity of output image data to scanned image data with clear contours of the target area.
10 画像読取装置
20 制御部
22 CPU
24 RAM
26 記憶部
28 画像読取部
32 撮像素子
34 スリット部材
36 搬送装置
44 光源
90 画像処理部
92 スペクトル生成処理部
94 比較処理部
96 合成スペクトル生成処理部
98 画像生成処理部
100 補正処理部
202a 読取画像データ
202b スペクトルデータ
202c 合成スペクトルデータ
202d 出力画像データ
202e 補正画像データ
10
24 RAM
26
Claims (17)
前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施すことで、複数のスペクトルデータを生成するスペクトル生成処理部と、
前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する比較処理部と、
前記比較処理部による比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する合成スペクトル生成処理部と、
前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する画像生成処理部とを備える、画像処理装置。 An image processing device that performs image processing on a plurality of scanned image data obtained by scanning a single object in lines along main scanning directions each extending in a different direction, the image processing device comprising:
a spectrum generation processing unit that generates a plurality of spectrum data by performing a Fourier transform process on each of the plurality of read image data;
a comparison processing unit that compares components corresponding to the same frequency of the plurality of spectrum data with each other;
a synthetic spectrum generation processing unit that generates synthetic spectrum data by selecting one component from among the components corresponding to the same frequency of the plurality of spectral data based on a comparison result by the comparison processing unit;
an image generation processing unit that generates output image data by performing an inverse Fourier transform process on the synthetic spectral data.
前記スペクトル生成処理部は、前記補正処理部による補正処理が施された前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施す、請求項1又は2に記載の画像処理装置。 a correction processing unit that performs a correction process on at least one of the plurality of read image data before the Fourier transform process is performed so that an area corresponding to the object is located in the same position on an image in each of the plurality of read image data,
The image processing apparatus according to claim 1 , wherein the spectrum generating section performs a Fourier transform process on each of the plurality of read image data that have been subjected to the correction process by the correction section.
前記複数のラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置とを備える、画像読取装置。 a plurality of line sensors each capable of reading an image in a line shape along a main scanning direction, the main scanning direction extending in a direction different from the sub-scanning direction;
5. An image reading apparatus comprising: the image processing apparatus according to claim 1, which performs image processing on a plurality of read image data obtained by reading the same object with the plurality of line sensors.
前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置とを備え、
前記少なくとも1つのラインセンサには、前記長手方向に対して傾斜し、前記長手方向に並べて配置される複数の第1撮像素子と、前記長手方向に対して前記第1撮像素子とは異なる角度で傾斜し、前記長手方向に並べて配置される複数の第2撮像素子とが含まれる、画像読取装置。 At least one line sensor having an elongated shape along a longitudinal direction intersecting with a sub-scanning direction;
and an image processing device according to any one of claims 1 to 4, which performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor;
An image reading device, wherein the at least one line sensor includes a plurality of first image pickup elements inclined with respect to the longitudinal direction and arranged in a row in the longitudinal direction, and a plurality of second image pickup elements inclined with respect to the longitudinal direction at an angle different from that of the first image pickup elements and arranged in a row in the longitudinal direction.
前記2つのラインセンサのうちの一方には、前記長手方向に対して傾斜する前記複数の第1撮像素子が前記長手方向に並べて配置され、
前記2つのラインセンサのうちの他方には、前記長手方向に対して前記第1撮像素子とは異なる角度で傾斜する前記複数の第2撮像素子が前記長手方向に並べて配置されている、請求項9に記載の画像読取装置。 the at least one line sensor includes two line sensors;
One of the two line sensors has the plurality of first image pickup elements arranged in the longitudinal direction and inclined with respect to the longitudinal direction,
10. The image reading device according to claim 9, wherein the other of the two line sensors has the plurality of second image pickup elements arranged in the longitudinal direction and inclined at an angle different from that of the first image pickup elements.
前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置とを備え、
前記ラインセンサは、
前記主走査方向に延び、前記対象物に光を照射する光源と、
前記主走査方向に延び、前記対象物と前記光源との間に配置されるスリット部材とを有する、画像読取装置。 At least one line sensor capable of reading an image in a line shape along a main scanning direction;
and an image processing device according to any one of claims 1 to 4, which performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor;
The line sensor includes:
A light source extending in the main scanning direction and irradiating the object with light;
an image reading device having a slit member extending in the main scanning direction and disposed between the object and the light source;
前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置とを備え、
前記ラインセンサは、前記対象物に光を照射するラインレーザ光源を有する、画像読取装置。 At least one line sensor capable of reading an image in a line shape along a main scanning direction;
and an image processing device according to any one of claims 1 to 4, which performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor;
The line sensor is an image reading device having a line laser light source that irradiates light onto the object.
前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置と、
前記主走査方向に対して交差する方向に延びる搬送路に沿って前記対象物を搬送する複数の搬送装置とを備え、
前記ラインセンサは、
前記対象物に光を照射する光源を有し、
前記複数の搬送装置は、前記搬送路に沿って互いに隙間を空けて配置されており、
前記光源は、前記搬送路に沿って搬送される前記対象物に前記隙間を介して光を照射し、又は、前記搬送路に沿って搬送される対象物に照射した光を前記隙間に入射させる、画像読取装置。 At least one line sensor capable of reading an image in a line shape along a main scanning direction;
The image processing device according to any one of claims 1 to 4, which performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor;
a plurality of conveying devices that convey the object along a conveying path that extends in a direction intersecting the main scanning direction;
The line sensor includes:
A light source that irradiates the object with light,
The plurality of conveying devices are disposed along the conveying path with gaps between them,
An image reading device, wherein the light source irradiates light through the gap onto the object being transported along the transport path, or causes the light irradiated onto the object being transported along the transport path to enter the gap.
前記少なくとも1つのラインセンサで同一の対象物を読み取ることにより得られる複数の読取画像データに対して、画像処理を施す請求項1~4のいずれか一項に記載の画像処理装置と、
前記主走査方向に対して交差する方向に延びる搬送路に沿って前記対象物を搬送する搬送装置とを備え、
前記ラインセンサは、
前記対象物に光を照射する光源を有し、
前記搬送装置は、前記搬送路を形成する搬送面を含み、当該搬送面が光透過性を有することにより、前記光源からの光が前記搬送面を透過して前記対象物に照射される、画像読取装置。 At least one line sensor capable of reading an image in a line shape along a main scanning direction;
The image processing device according to any one of claims 1 to 4, which performs image processing on a plurality of read image data obtained by reading the same object with the at least one line sensor;
a conveying device that conveys the object along a conveying path that extends in a direction intersecting the main scanning direction,
The line sensor includes:
A light source that irradiates the object with light,
The conveying device includes a conveying surface that forms the conveying path, and the conveying surface is optically transparent, so that light from the light source passes through the conveying surface and is irradiated onto the object.
前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を施すことで、複数のスペクトルデータを生成するスペクトル生成ステップと、
前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する比較ステップと、
前記比較ステップによる比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する合成スペクトル生成ステップと、
前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する画像生成ステップとを備える、画像処理方法。 An image processing method for performing image processing on a plurality of scanned image data obtained by scanning a same object in lines along main scanning directions each extending in a different direction, the method comprising:
a spectrum generating step of generating a plurality of spectrum data by performing a Fourier transform process on each of the plurality of read image data;
a comparison step of comparing components corresponding to the same frequency of the plurality of spectrum data with each other;
a synthetic spectrum generating step of generating synthetic spectrum data by selecting one component from among the components corresponding to the same frequency of the plurality of spectral data based on a comparison result of the comparing step;
and an image generating step of generating output image data by performing an inverse Fourier transform process on the synthetic spectral data.
前記複数の読取画像データのそれぞれに対して、フーリエ変換処理を行うことで、複数のスペクトルデータを生成するスペクトル生成ステップと、
前記複数のスペクトルデータの同一周波数に対応する各成分同士を比較する比較ステップと、
前記比較ステップによる比較結果に基づき、前記複数のスペクトルデータの同一周波数に対応する各成分の中からいずれかの成分を選択することにより、合成スペクトルデータを生成する合成スペクトル生成ステップと、
前記合成スペクトルデータに対して、逆フーリエ変換処理を施すことで、出力画像データを生成する画像生成ステップとをコンピュータに実行させる、画像処理プログラム。 An image processing program for performing image processing on a plurality of scanned image data obtained by scanning an identical object in lines along main scanning directions each extending in a different direction, the program comprising:
a spectrum generating step of generating a plurality of spectrum data by performing a Fourier transform process on each of the plurality of read image data;
a comparison step of comparing components corresponding to the same frequency of the plurality of spectrum data with each other;
a synthetic spectrum generating step of generating synthetic spectrum data by selecting one component from among the components corresponding to the same frequency of the plurality of spectral data based on a comparison result of the comparing step;
and an image generating step of generating output image data by performing an inverse Fourier transform process on the synthetic spectral data.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021048810 | 2021-03-23 | ||
| JP2021048810 | 2021-03-23 | ||
| PCT/JP2022/012653 WO2022202671A1 (en) | 2021-03-23 | 2022-03-18 | Image processing device, image processing method, image processing program, and image reading device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022202671A1 JPWO2022202671A1 (en) | 2022-09-29 |
| JP7515134B2 true JP7515134B2 (en) | 2024-07-12 |
Family
ID=83397320
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023509127A Active JP7515134B2 (en) | 2021-03-23 | 2022-03-18 | IMAGE PROCESSING APPARATUS, IMAGE PROCESSING METHOD, IMAGE PROCESSING PROGRAM, AND IMAGE READING APPARATUS |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7515134B2 (en) |
| WO (1) | WO2022202671A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006221365A (en) | 2005-02-09 | 2006-08-24 | Bitstrong:Kk | Line scan type image processing unit |
| JP2007281956A (en) | 2006-04-07 | 2007-10-25 | Fuji Xerox Co Ltd | Resolution evaluation device, resolution evaluation method, and program |
| JP2008176645A (en) | 2007-01-19 | 2008-07-31 | Konica Minolta Holdings Inc | Three-dimensional shape processing apparatus, control method of three-dimensional shape processing apparatus, and control program of three-dimensional shape processing apparatus |
-
2022
- 2022-03-18 JP JP2023509127A patent/JP7515134B2/en active Active
- 2022-03-18 WO PCT/JP2022/012653 patent/WO2022202671A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006221365A (en) | 2005-02-09 | 2006-08-24 | Bitstrong:Kk | Line scan type image processing unit |
| JP2007281956A (en) | 2006-04-07 | 2007-10-25 | Fuji Xerox Co Ltd | Resolution evaluation device, resolution evaluation method, and program |
| JP2008176645A (en) | 2007-01-19 | 2008-07-31 | Konica Minolta Holdings Inc | Three-dimensional shape processing apparatus, control method of three-dimensional shape processing apparatus, and control program of three-dimensional shape processing apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022202671A1 (en) | 2022-09-29 |
| WO2022202671A1 (en) | 2022-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8797609B2 (en) | Image sensor unit and image reading apparatus | |
| JP7026309B2 (en) | Optical visual inspection device and optical visual inspection system using it | |
| KR100996335B1 (en) | Apparatus and methods for inspecting a composite structure for inconsistencies | |
| WO2018137233A1 (en) | Optical inspection system | |
| KR20110128139A (en) | Appearance inspection apparatus | |
| EP3465171B1 (en) | Surface inspection system and inspection method | |
| KR20200126025A (en) | Surface inspection system and surface inspection method | |
| KR20150116863A (en) | Imaging system for transparent plate surface inspection | |
| US20200014835A1 (en) | Light irradiation apparatus, optical evaluation apparatus, and article manufacturing method | |
| JP7515134B2 (en) | IMAGE PROCESSING APPARATUS, IMAGE PROCESSING METHOD, IMAGE PROCESSING PROGRAM, AND IMAGE READING APPARATUS | |
| JP6435790B2 (en) | Light irradiation apparatus, image reading apparatus, and image forming apparatus | |
| JP6679942B2 (en) | Sheet defect inspection device | |
| JP5508303B2 (en) | 3D shape measuring device | |
| JP2010101692A (en) | Method and device for inspecting sheetlike article | |
| US10477057B2 (en) | Scanner and scanner data generating method | |
| CN112703393B (en) | Illumination for defect inspection of sheet, defect inspection device for sheet, and defect inspection method for sheet | |
| CN112791983B (en) | Finished goods scanning assembly | |
| KR20220165784A (en) | Foreign material/defect inspection apparatus, image generating apparatus in foreign material/defect inspection, and foreign material/defect inspection method | |
| WO2006104608A1 (en) | Linear illumination using cylindrical elliptical reflective surface | |
| JP2014178204A (en) | Image inspection device and image inspection method | |
| JP2019126019A (en) | Imaging optical mechanism, reading module, and image reading apparatus | |
| JP2010008468A (en) | Radiographic image reading apparatus | |
| JP2018207138A (en) | Scanner and method for producing scan data | |
| JP7307618B2 (en) | Inspection system and light irradiation device | |
| JP7199945B2 (en) | optical measuring device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230707 |
|
| AA64 | Notification of invalidation of claim of internal priority (with term) |
Free format text: JAPANESE INTERMEDIATE CODE: A241764 Effective date: 20230926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231006 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240416 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240521 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240604 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240621 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7515134 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |