JP7478900B2 - 物体認識装置 - Google Patents
物体認識装置 Download PDFInfo
- Publication number
- JP7478900B2 JP7478900B2 JP2023506720A JP2023506720A JP7478900B2 JP 7478900 B2 JP7478900 B2 JP 7478900B2 JP 2023506720 A JP2023506720 A JP 2023506720A JP 2023506720 A JP2023506720 A JP 2023506720A JP 7478900 B2 JP7478900 B2 JP 7478900B2
- Authority
- JP
- Japan
- Prior art keywords
- object recognition
- data
- output data
- stages
- recognition device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 claims description 55
- 230000009466 transformation Effects 0.000 claims description 12
- 238000005192 partition Methods 0.000 claims 2
- 238000010586 diagram Methods 0.000 description 14
- 238000004364 calculation method Methods 0.000 description 13
- 238000010408 sweeping Methods 0.000 description 5
- 230000006870 function Effects 0.000 description 4
- 238000009434 installation Methods 0.000 description 2
- 230000001678 irradiating effect Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000000593 degrading effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 239000008241 heterogeneous mixture Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images













Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/48—Program initiating; Program switching, e.g. by interrupt
- G06F9/4806—Task transfer initiation or dispatching
- G06F9/4812—Task transfer initiation or dispatching by interrupt, e.g. masked
- G06F9/4831—Task transfer initiation or dispatching by interrupt, e.g. masked with variable priority
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F9/00—Arrangements for program control, e.g. control units
- G06F9/06—Arrangements for program control, e.g. control units using stored programs, i.e. using an internal store of processing equipment to receive or retain programs
- G06F9/46—Multiprogramming arrangements
- G06F9/48—Program initiating; Program switching, e.g. by interrupt
- G06F9/4806—Task transfer initiation or dispatching
- G06F9/4843—Task transfer initiation or dispatching by program, e.g. task dispatcher, supervisor, operating system
- G06F9/4881—Scheduling strategies for dispatcher, e.g. round robin, multi-level priority queues
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/764—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using classification, e.g. of video objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/60—Type of objects
- G06V20/64—Three-dimensional objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/12—Acquisition of 3D measurements of objects
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- General Engineering & Computer Science (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Image Processing (AREA)
Description
以下、添付の図面を用いてこの発明の実施形態の一例を説明する。また説明中の記述と、添付のフロ―チャートが示す処理との対応を、フローチャート中に付与した記号(S1,S2,…)を記述中に併記することで示す。
本発明が適用される物体認識装置3は装置への入力となる外界認識センサ1としてRadarセンサを利用することもできる。Radarセンサを用いて取得された観測点の集合としての点群データに対しても実施例1に示した本発明を適用した物体認識装置3を構成可能である。また、カメラセンサを用いて取得された画像データから抽出した観測点の集合としての点群データに対しても同様に実施例1に示した本発明を適用した物体認識装置3を構成可能である。
本発明が適用される物体認識装置3は装置への入力となる外界認識センサ1を一種類に限定するものではなく、複数種類のセンサを異種混合に用いてもよく、また構成するセンサの個数も1個に限定されるものではなく、複数個のセンサを用いても実施例1および実施例2に示した本発明を適用した物体認識装置3を構成可能である。
Claims (14)
- センサによってセンシングされた点群のセンサデータを複数のステージからなるソフトウェアパイプラインに入力して物体認識処理を実行するプロセッサと、メモリと、を備え、
前記プロセッサは、それぞれの前記ステージに割り当てられた前記物体認識処理を構成する処理を実行する複数の処理ユニットを有し、
前記メモリは、それぞれの前記ステージの出力データを一時的に格納する複数のタスクキュー領域を有し、
前記プロセッサは、それぞれの前記ステージの前記出力データが後段の前記ステージの入力において有効でない場合、それぞれの前記タスクキュー領域に前記出力データを格納せずに棄却する物体認識装置であって、
前記プロセッサは、前記センサによってセンシングされた方位角の所定範囲に対応する前記センサデータごとに前記ソフトウェアパイプラインによって前記物体認識処理を実行することを特徴とする物体認識装置。 - 請求項1に記載の物体認識装置であって、
前記プロセッサは、
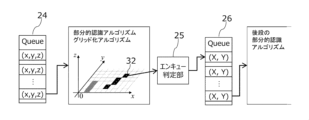
それぞれの前記ステージの前記出力データをそれぞれの前記タスクキュー領域に格納するかどうかを判定する複数のエンキュー判定部を備え、
それぞれのエンキュー判定部は、
それぞれの前記ステージの前記出力データが後段の前記ステージの入力において有効でない場合、それぞれの前記タスクキュー領域に前記出力データを格納せずに棄却する
ことを特徴とする物体認識装置。 - 請求項2に記載の物体認識装置であって、
それぞれの前記処理ユニットは、
それぞれの前記ステージにおいて、前記センサデータ又は前段の前記ステージの前記タスクキュー領域に格納された前記出力データを用いて演算を行う
ことを特徴とする物体認識装置。 - 請求項2に記載の物体認識装置であって、
それぞれの前記エンキュー判定部は、
それぞれの前記ステージの前記出力データが後段の前記ステージの入力において有効である場合のみ、それぞれの前記タスクキュー領域に前記出力データを格納する
ことを特徴とする物体認識装置。 - 請求項1に記載の物体認識装置であって、
前記プロセッサは、
それぞれの前記ステージの前記タスクキュー領域に格納された未処理の前記出力データの数に応じて前記タスクキュー領域の優先度を決定するタスク優先度決定部を有する
ことを特徴とする物体認識装置。 - 請求項5に記載の物体認識装置であって、
前記タスク優先度決定部は、
それぞれの前記ステージの前記タスクキュー領域に格納された未処理の前記出力データの数が多い順に前記タスクキュー領域に高い優先度を付与する
ことを特徴とする物体認識装置。 - 請求項6に記載の物体認識装置であって、
前記プロセッサは、
最も高い前記優先度が付与された前記タスクキュー領域に格納された前記出力データを処理する後段の前記ステージに複数の前記処理ユニットを動的に割り当る
ことを特徴とする物体認識装置。 - 請求項2に記載の物体認識装置であって、
前記センサは、観測値が取得できない場合、無効であることを示す情報を前記センサデータに含めて出力し、
最初の前記ステージの前記処理ユニットは、前記センサデータに無効であることを示す情報が含まれる場合、無効であることを示す情報を前記出力データに含めて出力し、
最初の前記ステージの前記エンキュー判定部は、
前記出力データに無効であることを示す情報が含まれる場合、最初の前記ステージの前記出力データが後段の前記ステージの入力において有効でないと判定する
ことを特徴とする物体認識装置。 - 請求項8に記載の物体認識装置であって、
最初の前記ステージの前記エンキュー判定部は、
最初の前記ステージの前記出力データが後段の前記ステージの入力において有効でない場合、前記出力データを最初の前記ステージのタスクキュー領域へ格納しない
ことを特徴とする物体認識装置。 - 請求項2に記載の物体認識装置であって、
少なくとも1つの前記ステージの前記エンキュー判定部は、
前記ステージの前記出力データが、前記センサがセンシングできる三次元空間の範囲内である場合、前記ステージの前記出力データが後段の前記ステージの入力において有効であると判定する
ことを特徴とする物体認識装置。 - 請求項2に記載の物体認識装置であって、
少なくとも1つの前記ステージの前記エンキュー判定部は、
前記ステージの前記出力データのうち重複する2個目以降の前記出力データを有効でないと判定する
ことを特徴とする物体認識装置。 - センサによってセンシングされた点群のセンサデータを複数のステージからなるソフトウェアパイプラインに入力して物体認識処理を実行するプロセッサと、メモリと、を備え、前記プロセッサは、それぞれの前記ステージに割り当てられた前記物体認識処理を構成する処理を実行する複数の処理ユニットを有し、前記メモリは、それぞれの前記ステージの出力データを一時的に格納する複数のタスクキュー領域を有し、前記プロセッサは、それぞれの前記ステージの前記出力データが後段の前記ステージの入力において有効でない場合、それぞれの前記タスクキュー領域に前記出力データを格納せずに棄却する物体認識装置であって、
前記物体認識処理は、
第1のステージで、前記センサデータをデコードし、デコードされた前記センサデータを座標形式データに変換する第1のステップと、
第2のステージで、前記座標形式データのうち位置の近いものどうしをグルーピングしてクラスタデータを生成する第2のステップと、
第3のステージで、前記クラスタデータを平面上の区画に射影変換して前記区画の位置を示すインデックス情報を生成する第3のステップと、
第4のステージで、前記インデックス情報のうち位置の近いものどうしをグルーピングする第4のステップと、を含む
ことを特徴とする物体認識装置。 - センサによってセンシングされた点群のセンサデータを複数のステージからなるソフトウェアパイプラインに入力して物体認識処理を実行するプロセッサと、メモリと、を備え、前記プロセッサは、それぞれの前記ステージに割り当てられた前記物体認識処理を構成する処理を実行する複数の処理ユニットを有し、前記メモリは、それぞれの前記ステージの出力データを一時的に格納する複数のタスクキュー領域を有し、前記プロセッサは、それぞれの前記ステージの前記出力データが後段の前記ステージの入力において有効でない場合、それぞれの前記タスクキュー領域に前記出力データを格納せずに棄却する物体認識装置であって、
前記ソフトウェアパイプラインは複数本設けられ、
前記センサによってセンシングされた方位角の所定範囲に対応する前記センサデータは、それに対応する前記ソフトウェアパイプラインに入力され、
前記プロセッサは、
それぞれの前記ソフトウェアパイプラインによって前記物体認識処理を実行する
ことを特徴とする物体認識装置。 - 請求項1に記載の物体認識装置であって、
それぞれの前記処理ユニットは、
それぞれの前記ステージに割り当てられた前記物体認識処理を構成する処理のアルゴリズムを示す部分的認識アルゴリズムに従って処理を実行する
ことを特徴とする物体認識装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021043669 | 2021-03-17 | ||
| JP2021043669 | 2021-03-17 | ||
| PCT/JP2021/035525 WO2022195929A1 (ja) | 2021-03-17 | 2021-09-28 | 物体認識装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPWO2022195929A1 JPWO2022195929A1 (ja) | 2022-09-22 |
| JP7478900B2 true JP7478900B2 (ja) | 2024-05-07 |
Family
ID=83320025
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2023506720A Active JP7478900B2 (ja) | 2021-03-17 | 2021-09-28 | 物体認識装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230418659A1 (ja) |
| JP (1) | JP7478900B2 (ja) |
| WO (1) | WO2022195929A1 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016112724A (ja) | 2014-12-11 | 2016-06-23 | キヤノン株式会社 | 画像処理装置、画像処理装置の制御方法、及びプログラム |
| JP2017092899A (ja) | 2015-11-17 | 2017-05-25 | ソニー株式会社 | 画像処理装置、画像処理方法、及び、プログラム |
| JP2020148513A (ja) | 2019-03-11 | 2020-09-17 | 三菱重工業株式会社 | 距離推定装置及び距離推定システム |
| JP2020154830A (ja) | 2019-03-20 | 2020-09-24 | オムロン株式会社 | パイプライン演算装置、プログラマブルロジックコントローラ、及び、パイプライン処理の実行方法 |
-
2021
- 2021-09-28 JP JP2023506720A patent/JP7478900B2/ja active Active
- 2021-09-28 US US18/252,779 patent/US20230418659A1/en active Pending
- 2021-09-28 WO PCT/JP2021/035525 patent/WO2022195929A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016112724A (ja) | 2014-12-11 | 2016-06-23 | キヤノン株式会社 | 画像処理装置、画像処理装置の制御方法、及びプログラム |
| JP2017092899A (ja) | 2015-11-17 | 2017-05-25 | ソニー株式会社 | 画像処理装置、画像処理方法、及び、プログラム |
| JP2020148513A (ja) | 2019-03-11 | 2020-09-17 | 三菱重工業株式会社 | 距離推定装置及び距離推定システム |
| JP2020154830A (ja) | 2019-03-20 | 2020-09-24 | オムロン株式会社 | パイプライン演算装置、プログラマブルロジックコントローラ、及び、パイプライン処理の実行方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230418659A1 (en) | 2023-12-28 |
| JPWO2022195929A1 (ja) | 2022-09-22 |
| WO2022195929A1 (ja) | 2022-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104237852B (zh) | 用于处理雷达信号的方法、装置和系统 | |
| KR102542580B1 (ko) | Dnn을 사용하여 ssd의 성능을 최적화하기 위한 시스템 및 방법 | |
| KR100866730B1 (ko) | 다중 프로세서 시스템, 데이터 처리 시스템, 데이터 처리방법 및 컴퓨터 프로그램 | |
| JP2019506676A (ja) | 拡張されたシステム性能のための適応可能な値範囲のプロファイリング | |
| CN110781819A (zh) | 一种图像目标检测方法、系统、电子设备及存储介质 | |
| CN110187835B (zh) | 用于管理访问请求的方法、装置、设备和存储介质 | |
| JP2010033561A (ja) | マルチプロセッサ・システム上でデータ・セットを区分化およびソートするための方法および装置 | |
| US20120030430A1 (en) | Cache control apparatus, and cache control method | |
| JPWO2011148920A1 (ja) | マルチプロセッサシステム、実行制御方法、実行制御プログラム | |
| JP2016522522A (ja) | プロセッサグラフィックスを用いた並行タッチポイント検出 | |
| US8151058B2 (en) | Vector computer system with cache memory and operation method thereof | |
| JP2019502201A5 (ja) | ||
| JP7478900B2 (ja) | 物体認識装置 | |
| Bhimani et al. | FIOS: Feature based I/O stream identification for improving endurance of multi-stream SSDs | |
| CN103729282A (zh) | 基于追踪的测量架构 | |
| KR101573112B1 (ko) | 데이터 분배 방법 및 장치 | |
| JP6442152B2 (ja) | 画像処理装置、画像処理方法 | |
| WO2022017136A1 (zh) | 点云数据处理的方法及装置、电子设备及存储介质 | |
| JP2018132873A (ja) | 情報処理装置 | |
| KR102347871B1 (ko) | 캐시 관리 매커니즘을 갖는 컴퓨팅 시스템 및 그 동작방법 | |
| WO2019181491A1 (ja) | 物体認識装置 | |
| JP7376416B2 (ja) | 演算装置、演算方法 | |
| US10007437B2 (en) | Management apparatus, storage system, method, and computer readable medium | |
| US11610102B1 (en) | Time-based memory allocation for neural network inference | |
| US11663465B2 (en) | Method of managing task performance in an artificial neural network, and system executing an artificial neural network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20230420 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20240206 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20240314 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240326 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240422 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7478900 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |