JP7470679B2 - インライン流体特徴付けシステムおよび方法 - Google Patents
インライン流体特徴付けシステムおよび方法 Download PDFInfo
- Publication number
- JP7470679B2 JP7470679B2 JP2021517568A JP2021517568A JP7470679B2 JP 7470679 B2 JP7470679 B2 JP 7470679B2 JP 2021517568 A JP2021517568 A JP 2021517568A JP 2021517568 A JP2021517568 A JP 2021517568A JP 7470679 B2 JP7470679 B2 JP 7470679B2
- Authority
- JP
- Japan
- Prior art keywords
- conduit
- fluid
- sensor
- patient
- fluid contents
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012530 fluid Substances 0.000 title claims description 501
- 238000000034 method Methods 0.000 title claims description 121
- 238000012512 characterization method Methods 0.000 title description 10
- 230000003287 optical effect Effects 0.000 claims description 133
- 210000001124 body fluid Anatomy 0.000 claims description 65
- 210000004369 blood Anatomy 0.000 claims description 57
- 239000008280 blood Substances 0.000 claims description 57
- 239000000203 mixture Substances 0.000 claims description 24
- 102000001554 Hemoglobins Human genes 0.000 claims description 19
- 108010054147 Hemoglobins Proteins 0.000 claims description 19
- 239000010839 body fluid Substances 0.000 claims description 17
- 238000004611 spectroscopical analysis Methods 0.000 claims description 11
- 238000012549 training Methods 0.000 claims description 8
- 230000008878 coupling Effects 0.000 claims description 6
- 238000010168 coupling process Methods 0.000 claims description 6
- 238000005859 coupling reaction Methods 0.000 claims description 6
- 238000003384 imaging method Methods 0.000 claims description 6
- 238000004422 calculation algorithm Methods 0.000 description 35
- 238000005259 measurement Methods 0.000 description 35
- 230000033001 locomotion Effects 0.000 description 26
- 230000015654 memory Effects 0.000 description 24
- 230000000875 corresponding effect Effects 0.000 description 21
- 238000002604 ultrasonography Methods 0.000 description 21
- 238000006073 displacement reaction Methods 0.000 description 18
- 238000010586 diagram Methods 0.000 description 15
- 230000007246 mechanism Effects 0.000 description 15
- 230000006870 function Effects 0.000 description 14
- 238000010801 machine learning Methods 0.000 description 11
- 238000004458 analytical method Methods 0.000 description 10
- 230000007704 transition Effects 0.000 description 10
- 210000002700 urine Anatomy 0.000 description 10
- 238000010438 heat treatment Methods 0.000 description 9
- FAPWRFPIFSIZLT-UHFFFAOYSA-M Sodium chloride Chemical compound [Na+].[Cl-] FAPWRFPIFSIZLT-UHFFFAOYSA-M 0.000 description 8
- 238000002835 absorbance Methods 0.000 description 8
- 238000000701 chemical imaging Methods 0.000 description 8
- 238000001514 detection method Methods 0.000 description 8
- 239000000463 material Substances 0.000 description 8
- 238000012545 processing Methods 0.000 description 8
- 239000000126 substance Substances 0.000 description 8
- 238000011144 upstream manufacturing Methods 0.000 description 8
- 238000000605 extraction Methods 0.000 description 7
- 239000011780 sodium chloride Substances 0.000 description 7
- 238000010521 absorption reaction Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 6
- 230000002596 correlated effect Effects 0.000 description 6
- 239000002245 particle Substances 0.000 description 6
- 238000011002 quantification Methods 0.000 description 6
- 230000002745 absorbent Effects 0.000 description 5
- 239000002250 absorbent Substances 0.000 description 5
- 239000012491 analyte Substances 0.000 description 5
- 239000000470 constituent Substances 0.000 description 5
- 238000012935 Averaging Methods 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 239000000284 extract Substances 0.000 description 4
- 230000006872 improvement Effects 0.000 description 4
- 238000013178 mathematical model Methods 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 230000001902 propagating effect Effects 0.000 description 4
- 238000001356 surgical procedure Methods 0.000 description 4
- 206010018910 Haemolysis Diseases 0.000 description 3
- 238000007792 addition Methods 0.000 description 3
- 210000004381 amniotic fluid Anatomy 0.000 description 3
- 238000003491 array Methods 0.000 description 3
- 230000008901 benefit Effects 0.000 description 3
- 230000005540 biological transmission Effects 0.000 description 3
- 238000009529 body temperature measurement Methods 0.000 description 3
- 238000013500 data storage Methods 0.000 description 3
- 238000013135 deep learning Methods 0.000 description 3
- 239000004744 fabric Substances 0.000 description 3
- 230000008588 hemolysis Effects 0.000 description 3
- 238000005286 illumination Methods 0.000 description 3
- 238000007726 management method Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000003595 spectral effect Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 239000002699 waste material Substances 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000013136 deep learning model Methods 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 238000000502 dialysis Methods 0.000 description 2
- 230000036541 health Effects 0.000 description 2
- 208000015181 infectious disease Diseases 0.000 description 2
- 238000002329 infrared spectrum Methods 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 238000012067 mathematical method Methods 0.000 description 2
- 239000011159 matrix material Substances 0.000 description 2
- 239000000523 sample Substances 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000007789 sealing Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 210000002966 serum Anatomy 0.000 description 2
- 230000002123 temporal effect Effects 0.000 description 2
- 238000002834 transmittance Methods 0.000 description 2
- -1 urine Substances 0.000 description 2
- 238000001429 visible spectrum Methods 0.000 description 2
- 208000032843 Hemorrhage Diseases 0.000 description 1
- 230000003213 activating effect Effects 0.000 description 1
- 239000003570 air Substances 0.000 description 1
- 210000000941 bile Anatomy 0.000 description 1
- 210000000601 blood cell Anatomy 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 210000001175 cerebrospinal fluid Anatomy 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 238000007405 data analysis Methods 0.000 description 1
- 230000034994 death Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 230000000779 depleting effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000004927 fusion Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000002350 laparotomy Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000012015 optical character recognition Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 230000004224 protection Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000013589 supplement Substances 0.000 description 1
- 239000013076 target substance Substances 0.000 description 1
- 230000019432 tissue death Effects 0.000 description 1
- 238000010200 validation analysis Methods 0.000 description 1
Images

























Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
- A61M1/36—Other treatment of blood in a by-pass of the natural circulatory system, e.g. temperature adaptation, irradiation ; Extra-corporeal blood circuits
- A61M1/3607—Regulation parameters
- A61M1/3609—Physical characteristics of the blood, e.g. haematocrit, urea
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/246—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments
- G06T7/248—Analysis of motion using feature-based methods, e.g. the tracking of corners or segments involving reference images or patches
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/02—Detecting, measuring or recording pulse, heart rate, blood pressure or blood flow; Combined pulse/heart-rate/blood pressure determination; Evaluating a cardiovascular condition not otherwise provided for, e.g. using combinations of techniques provided for in this group with electrocardiography or electroauscultation; Heart catheters for measuring blood pressure
- A61B5/026—Measuring blood flow
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/145—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue
- A61B5/1455—Measuring characteristics of blood in vivo, e.g. gas concentration, pH value; Measuring characteristics of body fluids or tissues, e.g. interstitial fluid, cerebral tissue using optical sensors, e.g. spectral photometrical oximeters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/06—Measuring blood flow
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/66—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by measuring frequency, phase shift or propagation time of electromagnetic or other waves, e.g. using ultrasonic flowmeters
- G01F1/661—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by measuring frequency, phase shift or propagation time of electromagnetic or other waves, e.g. using ultrasonic flowmeters using light
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/66—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by measuring frequency, phase shift or propagation time of electromagnetic or other waves, e.g. using ultrasonic flowmeters
- G01F1/663—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by measuring frequency, phase shift or propagation time of electromagnetic or other waves, e.g. using ultrasonic flowmeters by measuring Doppler frequency shift
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/66—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by measuring frequency, phase shift or propagation time of electromagnetic or other waves, e.g. using ultrasonic flowmeters
- G01F1/667—Arrangements of transducers for ultrasonic flowmeters; Circuits for operating ultrasonic flowmeters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/68—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by using thermal effects
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/68—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow by using thermal effects
- G01F1/684—Structural arrangements; Mounting of elements, e.g. in relation to fluid flow
- G01F1/6845—Micromachined devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/704—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow using marked regions or existing inhomogeneities within the fluid stream, e.g. statistically occurring variations in a fluid parameter
- G01F1/708—Measuring the time taken to traverse a fixed distance
- G01F1/7086—Measuring the time taken to traverse a fixed distance using optical detecting arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F1/00—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow
- G01F1/704—Measuring the volume flow or mass flow of fluid or fluent solid material wherein the fluid passes through a meter in a continuous flow using marked regions or existing inhomogeneities within the fluid stream, e.g. statistically occurring variations in a fluid parameter
- G01F1/708—Measuring the time taken to traverse a fixed distance
- G01F1/712—Measuring the time taken to traverse a fixed distance using auto-correlation or cross-correlation detection means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N33/00—Investigating or analysing materials by specific methods not covered by groups G01N1/00 - G01N31/00
- G01N33/48—Biological material, e.g. blood, urine; Haemocytometers
- G01N33/483—Physical analysis of biological material
- G01N33/487—Physical analysis of biological material of liquid biological material
- G01N33/49—Blood
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/60—Analysis of geometric attributes
- G06T7/62—Analysis of geometric attributes of area, perimeter, diameter or volume
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3306—Optical measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3331—Pressure; Flow
- A61M2205/3334—Measuring or controlling the flow rate
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2205/00—General characteristics of the apparatus
- A61M2205/33—Controlling, regulating or measuring
- A61M2205/3375—Acoustical, e.g. ultrasonic, measuring means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2230/00—Measuring parameters of the user
- A61M2230/20—Blood composition characteristics
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F15/00—Details of, or accessories for, apparatus of groups G01F1/00 - G01F13/00 insofar as such details or appliances are not adapted to particular types of such apparatus
- G01F15/06—Indicating or recording devices
- G01F15/061—Indicating or recording devices for remote indication
- G01F15/063—Indicating or recording devices for remote indication using electrical means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F25/00—Testing or calibration of apparatus for measuring volume, volume flow or liquid level or for metering by volume
- G01F25/10—Testing or calibration of apparatus for measuring volume, volume flow or liquid level or for metering by volume of flowmeters
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30101—Blood vessel; Artery; Vein; Vascular
- G06T2207/30104—Vascular flow; Blood flow; Perfusion
Landscapes
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Biomedical Technology (AREA)
- Hematology (AREA)
- General Health & Medical Sciences (AREA)
- Heart & Thoracic Surgery (AREA)
- Electromagnetism (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Vascular Medicine (AREA)
- Chemical & Material Sciences (AREA)
- Cardiology (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Food Science & Technology (AREA)
- Medicinal Chemistry (AREA)
- Anesthesiology (AREA)
- Immunology (AREA)
- Biochemistry (AREA)
- Ecology (AREA)
- Urology & Nephrology (AREA)
- Analytical Chemistry (AREA)
- Geometry (AREA)
- Radiology & Medical Imaging (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Physiology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Optics & Photonics (AREA)
- Multimedia (AREA)
- External Artificial Organs (AREA)
Description
本出願は、2018年9月27日に出願された「SYSTEMS AND METHODS FOR IN-LINE FLUID CHARACTERIZATION」という名称の米国仮特許出願第62/737,730号の優先権の利益を主張するものであり、その内容は引用により全体が本明細書に援用されるものとする。
患者の体液を含む流体内容物を搬送するように構成された導管と、
導管に結合されたセンサ配列であって、流体内容物に基づいてセンサデータを生成するように構成された少なくとも1のセンサを含むセンサ配列と、
1または複数のプロセッサであって、
患者体液を含む流体内容物が流れている導管に結合されたセンサ配列からのセンサデータにアクセスすることと、
導管を流れる流体内容物の流れを定量化することと、
導管を流れる流体内容物中の患者体液の流体成分の濃度を推定することと、
流体内容物の定量化した流れおよび流体内容物中の流体成分の推定濃度に基づいて、導管を通る患者体液の推移を特徴付けることとを含む動作を実行するように構成され、流れの定量化または濃度の推定の少なくとも一方が、導管に結合されたセンサ配列からのセンサデータに基づくものである、1または複数のプロセッサとを備える。
導管を流れる流体内容物の流れを定量化するステップと、
導管を流れる流体内容物中の患者体液の流体成分の濃度を推定するステップと、
1または複数のプロセッサによって、流体内容物の定量化した流れおよび流体内容物中の流体成分の推定濃度に基づいて、導管を通る患者体液の推移を特徴付けるステップであって、流れの定量化または濃度の推定の少なくとも一方が、導管に結合されたセンサ配列からのセンサデータに基づく、ステップとを含む。
機械の1または複数のプロセッサによって実行されるときに、機械に動作を行わせる命令を含み、
前記動作が、
患者体液を含む流体内容物が流れる導管に結合されたセンサ配列からのセンサデータにアクセスすること、
導管を流れる流体内容物の流れを定量化すること、
導管を流れる流体内容物中の流体成分の濃度を推定すること、および、
流体内容物の定量化した流れおよび流体内容物中の流体成分の推定濃度に基づいて、導管を通る患者体液の推移を特徴付けることを含み、流れの定量化および濃度の推定のうちの少なくとも一方が、導管に接続されたセンサ配列からのセンサデータに基づくものである。
一般に、図1に示すように、システム100は、導管120内の流体内容物のインライン特徴付けを可能にするために、導管120に結合するように構成されたセンサ配列110を含む。センサ配列110は、少なくとも1のセンサを含み、このセンサは、導管を通る流体内容物の流れを定量化するか、患者の体液中の流体成分の濃度を推定するか、またはその両方を行うように構成されている。流体内容物は、少なくとも1の患者体液(例えば、血液または尿)、場合によっては1または複数の他の流体(例えば、生理食塩水または空気)、またはそれらの組合せを含む。センサ配列は、センサコンポーネント(例えば、1または複数のセンサ、対応するセンサ電子機器、データ送信機、プロセッサなど)を支持するハウジング内に少なくとも部分的に配置されている。
センサ配列110は、センサ配列110の少なくとも一部のコンポーネントおよびそれに付随する電子機器を支持するハウジング内に少なくとも部分的に配置することができる。また、ハウジングは、センサ配列110を、導管120、1または複数の他の導管または導管枝、またはそれらの任意の適切な組合せに結合することができる。代替的には、センサ配列110のセンサおよび他のコンポーネントの少なくとも一部は、(例えば、単一の共通ハウジングの外側で)導管120に別々に結合され、例えば、導管120に個別に結合されるようにしてもよい。このため、いくつかの態様では、例えば、ハウジング、個々のコンポーネント、またはそれらの任意の適切な組合せ(例えば、グループ化されたコンポーネントの1または複数のグループ)が、(例えば、任意の特定のタイプまたはブランドの導管に結合されることに依存することなく)広範囲の導管タイプに結合できるという意味で、センサ配列110が調整可能またはユニバーサルであってもよい。
センサ配列(例えば、センサ配列110、210または310)は、流れを定量化する(例えば、流れの速度、流れの質量流量、流れの体積流量、またはそれらの任意の適切な組合せを推定する)、流体成分濃度を推定する、またはその両方を行うように構成された1または複数のセンサを含むことができる。一般に、1または複数のセンサは、導管(例えば、導管120、250、450または550)の外面上またはその近傍に配置することができる。後述するように、いくつかの態様では、センサは、導管を流れる流れの速度を定量化するように構成することができる。他の態様では、後述するように、センサは、導管を流れる流体内容物の質量を定量化するように構成することができる。さらに、流体内容物の体積測定値は、定量化された流れの測定値から導出するようにしてもよい。例えば、導管を通る体積流量は、流量(例えば、流速)から導出するようにしてもよい。導管のプロファイル全体が流体内容物で満たされている状況では、体積流量は、定量化された流速に導管の断面積を乗じたものとなる。別の例として、導管を流れる流体内容物の体積は、流体内容物の測定された質量から求めるようにしてもよい。流体内容物が均一である状況では、流体内容物の体積は、定量化された流体内容物の質量を、流体内容物の既知の密度で割ったものとなる。定量化された流量および流体内容物の組成に関連する他の情報(例えば、以下にさらに詳細に説明するように、分光分析による情報)に基づいて、他の体積測定値を導出することができる。いくつかの態様では、1または複数の体積測定値を使用して、導管を通過する患者の体液を具体的に定量化し、これを使用して患者の全体的な体液喪失の定量化を補助することができる。
いくつかの態様では、センサ配列(例えば、センサ配列110、210または310)が、1または複数の超音波流量センサを含む。例えば、図6Aに示すように、センサ配列は、流体内容物が流れている導管650に隣接または近接して配置された少なくとも1の超音波ドップラー流量計620を含むことができる。超音波ドップラー流量計620は、超音波のビームを導管650内に放出するように構成された送信機(Tx)と、導管650内の流体内容物によって反射される超音波を検出するように構成された受信機(Rx)とを含むトランスデューサを含むことができる。反射された超音波の周波数シフトを分析して、送信機、流体内容物および受信機の間の相対的な動きを測定することができる。送信機および受信機が導管650に対して固定されている状態で、測定された相対運動は、導管650内の流体内容物の流量に相関し得る。


さらに他の態様では、センサ配列(例えば、センサ配列110、210または310)が、導管(例えば、導管120、250、450、550または650)内の流体内容物の流量を測定するように構成された1または複数の光学センサを含む。例えば、図7Aに示すように、センサ配列は、導管750のほぼ反対側に位置するエミッタアレイ710および検出器アレイ720を含むことができる。エミッタアレイ710は、一連の光エミッタ(例えば、LED)を含み、検出器アレイ720は、一連の光検出器(例えば、CMOSセンサ)を含み、対向する光エミッタおよび光検出器が、一連のエミッタ-検出器のペアを形成することができる。各光エミッタは、その対応する光検出器に向けて光を放出するように構成され、放出された光が導管750内の流体内容物を通って伝達されるようになっている。いくつかの態様では、少なくともいくつかの光エミッタが、対象となる物質(例えば、血液またはヘモグロビン)の吸収特性に基づいて、予め設定された波長の光を放出するように構成される。例えば、少なくともいくつかの光エミッタは、約532nmの波長を有する光を放出するように構成され、放出された光が導管750内の流体内容物中のヘモグロビンによる吸収が最大となるように最適化されている。追加的または代替的には、いくつかの態様において、少なくともいくつかの光エミッタが、広範囲の波長(例えば、広いスペクトルを有する白色光)を放出するように構成される。

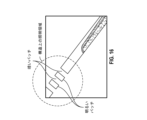
いくつかの態様では、図10に示すように、センサ配列(例えば、センサ配列110、210または310)が、導管1050を通って流れる流体内容物の質量を定量化するように構成された熱質量流量センサ1010を含む。例えば、流体内容物の熱質量流量を推定することは、流体内容物の流れに既知の量の熱を導入して、流体内容物の関連する(例えば、対応する)温度変化を測定することを含むことができる。これは、例えば、プローブを一定の温度に維持して、その際に消費されるエネルギーを測定することによって行うことができる。別の例として、流体内容物の熱質量流量を推定することは、流体内容物の流れに既知の量の熱を導入して、下流のある地点で流体内容物の温度変化を測定することを含むことができる。

さらに他の態様では、センサ配列(例えば、センサ配列110、210または310)が、流れを定量化し、導管(例えば、導管120、250、450、550、650、750、850または1050)内の流体内容物の組成または成分濃度を推定し、またはその両方を行うように構成された1または複数の画像センサを含む。例えば、光学画像センサ(例えば、CCD、CMOSなど)は、(例えば、他の適切な光学成分とともに)ピクセルの赤、緑、青(RGB)の色成分を有するカラー光学デジタル画像をキャプチャすることができる。例えば、画像センサは、適切な対応する光学系、フィルタ(例えば、ベイヤーパターンフィルタなどのカラーフィルタアレイ)、またはそれらの任意の適切な組合せと対になった単一の画像センサであってもよい。別の例として、センサ配列は、白色光を別々のカラーチャンネルに分割するための少なくとも1のプリズムまたは回折面などの適切な対応する光学系と対になった複数の画像センサを含むことができ、カラーチャンネルの各々が、それぞれの画像センサによって(例えば、カラーチャンネルに対応する適切な光学フィルタを用いて)検出される。しかしながら、センサ配列は、導管およびその流体内容物の画像を生成することができるように、任意の適切な画像センサおよび他の光学部品を含むことができる。
いくつかの態様では、センサ配列(例えば、センサ配列110、210または310)が、流体内容物の1または複数の流体成分の濃度、導管(例えば、導管120、250、450、550、650、750、850または1050)内の流体内容物の他の組成、またはその両方を推定するように構成された1または複数のセンサをさらに含む。例えば、図11に示すように、センサ配列は、ある範囲の波長の光を放出するように構成されたマルチスペクトルエミッタアレイLEDCと、導管1150内の流体内容物によって反射されるある波長の範囲の光を検出するように構成されたマルチスペクトル検出器アレイPDCとを含むマルチスペクトル画像化装置1110を含むことができる。例えば、LEDまたは他の適切な光エミッタを含むことができるマルチスペクトルエミッタアレイLEDCは、一般に可視スペクトル、近赤外スペクトル、またはその両方の光を放出する(例えば、一般に400nm~900nmの波長を有する光を放出する)ように構成することができる。マルチスペクトルエミッタアレイLEDCは、複数のLEDを含むことができ、その各々が、波長の範囲のサブセット(例えば、400nm~450nm、450nm~500nmなど)の光を放出し、それにより、エミッタアレイLEDCが適切なマルチスペクトル範囲を集合的に放出するようになっている。マルチスペクトル検出器アレイPDCは、CMOSセンサまたは他の適切な画像センサを含むことができ、一般に可視スペクトル、赤外スペクトルまたはその両方の光を検出するように構成することができる。例えば、マルチスペクトル検出器アレイPDCは、複数のCMOSセンサを含むことができ、各センサが、対応するフィルタを有し、それにより各CMOSセンサが、フィルタによって許容される波長の光のみを検出するようになっている。例示的な実施形態では、マルチスペクトル画像化装置1110は、約10個~約100個のLED(例えば、エミッタアレイLEDC内)と、約10個~約100個のCMOSセンサ(例えば、検出器アレイPDC内)とを含む。各LEDは、それぞれの離散的な範囲の光を放出することができ、同じ範囲の光を検出する対応するCMOSセンサを有することができる。

一般に、システム100は、1または複数のプロセッサが命令を実行するときに、1または複数のプロセッサが本明細書に記載の方法の態様を実行するように、メモリに格納されている命令を実行するように構成された1または複数のプロセッサを含むことができる。例えば、1または複数のプロセッサは、導管(例えば、導管120、250、450、550、650、750、850、1050または1150)を通る流体内容物の流れを定量化し、患者の体液中の流体成分の濃度を推定し、定量化した流れおよび流体成分の濃度に少なくとも部分的に基づいて患者の体液喪失を特徴付け、またはそれらの任意の適切な組合せを実行するように構成されている。データ分析の他の態様は、1または複数のプロセッサによって追加的に実行することができる。
いくつかの態様では、図1に示すように、システム100は、データ、ユーザへのデータの分析(例えば、患者の体液喪失の推定)、または両方を表示するように構成された1または複数のディスプレイ148をさらに含むことができる。ディスプレイ148は、(例えば、上述した1または複数のプロセッサ154と同じコンピューティングデバイス150の一部としての)ハンドヘルドデバイスまたはモバイルデバイス上のスクリーン、コンピュータモニタ、テレビスクリーン、プロジェクタスクリーンまたは他の適切なディスプレイを含むことができる。いくつかの態様では、ディスプレイ148がユーザインターフェース(例えば、グラフィカルユーザインターフェース)を表示するように構成され、このユーザインターフェースが、ユーザが情報(例えば、血清から導出される患者のヘモグロビン値、または導管のブランド、材料、サイズ、壁の厚さなどの導管の情報であって、システム100を特定の導管タイプに対して較正するために使用することができる情報)を入力すること、表示オプション(例えば、フォント、色、言語など)を選択すること、コンテンツ(例えば、患者情報、流体関連情報、アラートなど)を表示すること、またはそれらの任意の適切な組合せを可能にする。そのような態様では、ディスプレイ148が、ユーザ対話型であり、皮膚、スタイラスまたは他のユーザの接触に応答する抵抗性または容量性のタッチスクリーンを含むことができる。他の態様では、ディスプレイ148が、マウス、キーボードまたは他の適切な入力デバイスによって制御されるカーソルを介したユーザ対話型であってもよい。
図12は、いくつかの例示的な実施形態に係る、導管(例えば、導管120、250、450、550、650、750、850、1050または1150)を通って流れる流体内容物を特徴付ける方法1200を実行する際のシステム100の動作を示すフローチャートである。そのような例示的な実施形態では、導管を流れる流体内容物の画像(例えば、ビデオ画像)が、光学センサ(例えば、カメラ)によってキャプチャされ、光学的質量流量アルゴリズム1210に入力される。このアルゴリズムは、流体モーショントラッキングに続いて流体質量推定器を含むものとして示されている。光学的質量流量アルゴリズム1210の出力は、光学的質量流量較正操作1220によって処理され、その結果として得られる出力は、センサ組合せ操作1240に提供される。
なお、本願の出願当初の開示事項を維持するために、本願の出願当初の請求項1~30の記載内容を以下に追加する。
(請求項1)
流体内容物が流れる導管に結合されたセンサ配列からのセンサデータにアクセスするステップであって、流体内容物が患者体液を含む、ステップと、
前記導管を流れる流体内容物の流れを定量化するステップと、
前記導管を流れる流体内容物中の患者体液の流体成分の濃度を推定するステップと、
1または複数のプロセッサにより、流体内容物の定量化された流れおよび流体内容物中の流体成分の推定濃度に基づいて、前記導管を通る患者体液の推移を特徴付けるステップとを備え、
流量の定量化または濃度の推定のうちの少なくとも一方が、前記導管に結合された前記センサ配列からの前記センサデータに基づくものであることを特徴とする方法。
(請求項2)
請求項1に記載の方法において、
患者体液が血液であり、流体成分がヘモグロビンであることを特徴とする方法。
(請求項3)
請求項1または2に記載の方法において、
患者体液の推移を特徴付けることが、前記導管を流れる血液の量を定量化することを含むことを特徴とする方法。
(請求項4)
請求項1に記載の方法において、
前記導管を流れる流体内容物中の流体成分の濃度を推定することが、流体内容物の組成を測定することを含むことを特徴とする方法。
(請求項5)
請求項4に記載の方法において、
流体内容物の組成を測定することが、前記導管を流れる流体内容物の分光分析を実行することを含むことを特徴とする方法。
(請求項6)
請求項1に記載の方法において、
流体内容物の流れを定量化することが、流体内容物の体積流量を推定することを含むことを特徴とする方法。
(請求項7)
請求項6に記載の方法において、
流体内容物の体積流量を推定することが、前記導管内に出射超音波を放出して、流体内容物から反射される入射超音波の周波数シフトを測定することを含むことを特徴とする方法。
(請求項8)
請求項6に記載の方法において、
流体内容物の体積流量を推定することが、前記導管内に超音波を放出して、流体内容物を透過した超音波の飛行時間を測定することを含むことを特徴とする方法。
(請求項9)
請求項6に記載の方法において、
流体内容物の体積流量を推定することが、第1の光信号と第2の光信号を比較することを含み、前記第1の光信号が、前記導管に沿った第1の位置で検出された光を示し、前記第2の光信号が、前記導管に沿った第2の位置で検出された光を示すことを特徴とする方法。
(請求項10)
請求項1に記載の方法において、
前記流体内容物の流れを定量化することが、流体内容物の質量流量を推定することを含むことを特徴とする方法。
(請求項11)
請求項1に記載の方法において、
流体内容物中の流体成分の濃度を推定することが、流体内容物が流れている前記導管のマルチスペクトル画像に基づくものであることを特徴とする方法。
(請求項12)
請求項1に記載の方法において、
前記導管を通る流体内容物の流れを減少させるステップをさらに含み、流体内容物の流れを定量化することが、流体内容物の減少した流れを定量化することを特徴とする方法。
(請求項13)
請求項1に記載の方法において、
前記導管を通る流体内容物の流れが、連続的な流れの第1の領域と、非連続的な流れの第2の領域とを含み、
前記センサデータが、連続的な流れの前記第1の領域に基づく超音波センサからの第1の出力と、非連続的な流れの前記第2の領域に基づく光学センサからの第2の出力とを含み、かつ、
流体内容物の流れを定量化することが、前記超音波センサからの第1の出力と、前記光学センサからの第2の出力とに基づいて、流量を推定することを含むことを特徴とする方法。
(請求項14)
請求項1に記載の方法において、
流体内容物の流れを定量化することが、基準センサデータによって表される基準の流れのトレーニングセットに基づいて候補の流れを定量化するようにトレーニングされた学習機械に前記センサデータを入力することを含み、トレーニングされた前記学習機械が、入力されたセンサデータに基づいて、流体内容物の定量化された流れを出力することを特徴とする方法。
(請求項15)
患者体液を含む流体内容物を運ぶように構成された導管に結合構成によって結合可能なセンサ配列であって、流体内容物に基づいてセンサデータを生成するように構成された少なくとも1のセンサを含むセンサ配列と、
動作を実行するように構成された1または複数のプロセッサとを備え、前記動作が、
患者体液を含む流体内容物が流れる前記導管に前記結合構成によって結合された前記センサ配列からの前記センサデータにアクセスすること、
前記導管を流れる流体内容物の流れを定量化すること、
前記導管を流れる流体内容物中の患者体液の流体成分の濃度を推定すること、および、
流体内容物の定量化された流れおよび流体内容物中の流体成分の推定濃度に基づいて、前記導管を通る患者体液の推移を特徴付けることを含み、
流量の定量化または濃度の推定のうちの少なくとも一方が、前記導管に接続された前記センサ配列からのセンサデータに基づくものであることを特徴とするシステム。
(請求項16)
請求項15に記載のシステムにおいて、
前記センサ配列が、前記導管の少なくとも一部を囲むように構成されたハウジングを含むことを特徴とするシステム。
(請求項17)
請求項15に記載のシステムにおいて、
前記結合構成が、前記導管上に固定するように構成されたジョーを含むことを特徴とするシステム。
(請求項18)
請求項15に記載のシステムにおいて、
流体内容物を運ぶように構成された前記導管が、流体内容物を運ぶように構成された少なくとも1の他の導管セグメントと列をなして結合可能な導管インサートを含むことを特徴とするシステム。
(請求項19)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、流体内容物の体積流量を出力するように構成された超音波センサを含むことを特徴とするシステム。
(請求項20)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、流体内容物を透過した光を検出するように構成された光学センサを含むことを特徴とするシステム。
(請求項21)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、前記導管に沿った複数の軸方向位置に配置された複数の光学センサを含むことを特徴とするシステム。
(請求項22)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、前記導管の周囲の複数の周方向位置に配置された複数の光学センサを含むことを特徴とするシステム。
(請求項23)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、前記導管の周りに螺旋状に配置された複数の光学センサを含むことを特徴とするシステム。
(請求項24)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、流体内容物の質量流量を出力するように構成された熱質量流量センサを含むことを特徴とするシステム。
(請求項25)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、流体内容物のマルチスペクトルイメージングを実行するように構成された光学センサのアレイを含むことを特徴とするシステム。
(請求項26)
請求項15に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1のセンサが、流体内容物のカラーイメージングを実行するように構成された光学センサのアレイを含むことを特徴とするシステム。
(請求項27)
請求項15に記載のシステムにおいて、
前記1または複数のプロセッサによって実行される動作がさらに、前記導管を通る患者体液の特徴付けられた推移に基づいて、ディスプレイにアラートを表示させることを含むことを特徴とするシステム。
(請求項28)
請求項15に記載のシステムにおいて、
前記導管を通る流体内容物の流れは、連続的な流れの第1の領域と、非連続的な流れの第2の領域とを含み、
前記センサデータが、連続的な流れの前記第1の領域に基づく超音波センサからの第1の出力と、非連続的な流れの前記第2の領域に基づく光学センサからの第2の出力とを含み、
流体内容物の流れを定量化することが、前記超音波センサからの第1の出力と、前記光学センサからの第2の出力とに基づいて、流量を推定することを含むことを特徴とするシステム。
(請求項29)
請求項15に記載のシステムにおいて、
前記1または複数のプロセッサによって実行される動作として、流体内容物の流れを定量化することが、基準センサデータによって表される基準の流れのトレーニングセットに基づいて候補の流れを定量化するようにトレーニングされた学習機械に前記センサデータを入力することを含み、トレーニングされた学習機械が、入力されたセンサデータに基づいて、流体内容物の定量化された流れを出力することを特徴とするシステム。
(請求項30)
機械の1または複数のプロセッサによって実行されるときに、前記機械に動作を行わせる命令を含む機械可読記憶媒体であって、
前記動作が、
患者体液を含む流体内容物が流れる導管に結合されたセンサ配列からのセンサデータにアクセスする動作と、
前記導管を流れる流体内容物の流れを定量化する動作と、
前記導管を流れる流体内容物中の流体成分の濃度を推定する動作と、
流体内容物の定量化された流れおよび流体内容物中の流体成分の推定濃度に基づいて、前記導管を通る患者体液の推移を特徴付ける動作とを含み、
流れの定量化または濃度の推定のうちの少なくとも一方が、前記導管に接続された前記センサ配列からの前記センサデータに基づくものであることを特徴とする機械可読記憶媒体。
導管を通る、患者体液を含む流体内容物の流量を定量化するステップと、
患者体液中の流体成分の濃度を推定するステップと、
定量化された流量および流体成分の濃度に少なくとも部分的に基づいて、患者体液の喪失を特徴付けるステップとを含み、
流量および流体成分の濃度のうち少なくとも一方が、導管に結合されたセンサ配列からのサンプリングデータに基づくものである、方法を提供する。
導管に接続可能なセンサ配列を備え、このセンサ配列が、
導管を通る、患者体液を含む流体内容物の流れを定量化するとともに、患者体液中の流体成分の濃度を推定するように構成された少なくとも1のセンサを含み、流体内容物が患者体液を含む、システムを提供する。
Claims (17)
- 流体内容物が流れる導管に結合されたセンサ配列からのセンサデータにアクセスするステップであって、該流体内容物が患者体液を含む、ステップと、
前記導管に沿った第1の位置で検出された光を示す第1の光信号と、前記導管に沿った第2の位置で検出された光を示す第2の光信号とを比較することによって、前記導管を流れる前記流体内容物の体積流量を推定するステップと、
前記導管を流れる前記流体内容物中の前記患者体液の流体成分の濃度を推定するステップと、
1つまたは複数のプロセッサにより、前記流体内容物の推定された体積流量および前記流体内容物中の流体成分の推定濃度に基づいて、前記導管を通って流れる前記患者体液を特徴付けるステップと
を備えてなり、
推定された前記体積流量および前記推定濃度の各々は、前記導管に結合された前記センサ配列からの前記センサデータに基づくものであることを特徴とする、方法。 - 請求項1に記載の方法において、
前記患者体液が血液であり、前記流体成分がヘモグロビンであることを特徴とする方法。 - 請求項1または2に記載の方法において、
前記導管を通って流れる前記患者体液を特徴付けるステップが、前記導管を流れる血液の量を定量化することを含むことを特徴とする方法。 - 請求項1に記載の方法において、
前記流体内容物の組成を推定することが、前記導管を流れる前記流体内容物の分光分析を実行することを含むことを特徴とする方法。 - 請求項1に記載の方法において、
前記流体内容物中の流体成分の濃度を推定することが、前記流体内容物が流れている前記導管のマルチスペクトル画像に基づくものであることを特徴とする方法。 - 請求項1に記載の方法において、
前記導管を通る流体内容物の流れが、連続的な流れの第1の領域と、非連続的な流れの第2の領域とを含み、
前記センサデータが、連続的な流れの前記第1の領域に基づく超音波センサからの第1の出力と、非連続的な流れの前記第2の領域に基づく光学センサからの第2の出力とを含み、かつ、
前記流体内容物の流れを定量化することが、前記超音波センサからの第1の出力と、前記光学センサからの第2の出力とに基づいて、流量を推定することを含むことを特徴とする方法。 - 請求項1に記載の方法において、
前記流体内容物の流れを定量化することが、基準センサデータによって表される基準の流れのトレーニングセットに基づいて候補の流れを定量化するようにトレーニングされた学習機械に前記センサデータを入力することを含み、トレーニングされた前記学習機械が、入力されたセンサデータに基づいて、前記流体内容物の定量化された流れを出力することを特徴とする方法。 - 患者体液を含む流体内容物を運ぶように構成された導管に結合構成によって結合可能なセンサ配列であって、前記流体内容物に基づいてセンサデータを生成するように構成された少なくとも1つのセンサを含むセンサ配列と、
動作を実行するように構成された1つまたは複数のプロセッサと
を備えてなり、
前記動作が、
前記患者体液を含む前記流体内容物が流れる前記導管に前記結合構成によって結合された前記センサ配列からの前記センサデータにアクセスすることと、
前記導管に沿った第1の位置で検出された光を示す第1の光信号と、前記導管に沿った第2の位置で検出された光を示す第2の光信号とを比較することによって、前記導管を流れる前記流体内容物の体積流量を推定することと、
前記導管を流れる前記流体内容物中の前記患者体液の流体成分の濃度を推定することと、
前記流体内容物の推定された体積流量および前記流体内容物中の流体成分の推定濃度に基づいて、前記導管を通って流れる前記患者体液を特徴付けることであって、推定された前記体積流量および前記推定濃度の各々は、前記導管に結合された前記センサ配列からのセンサデータに基づくものである、特徴付けることと
を含むことを特徴とする、システム。 - 請求項8に記載のシステムにおいて、
前記流体内容物を運ぶように構成された前記導管が、前記流体内容物を運ぶように構成された少なくとも1つの他の導管セグメントと列をなして結合可能な導管インサートを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1つのセンサが、前記導管の周囲の複数の周方向位置に配置された複数の光学センサを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1つのセンサが、前記導管の周りに螺旋状に配置された複数の光学センサを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記導管に結合された前記センサ配列のうちの少なくとも1つのセンサが、前記流体内容物のカラーイメージングを実行するように構成された光学センサのアレイを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記1つまたは複数のプロセッサによって実行される動作がさらに、前記導管を通って流れる患者体液を特徴付けることに基づいて、ディスプレイにアラートを表示させることを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記導管を通る前記流体内容物の流れは、連続的な流れの第1の領域と、非連続的な流れの第2の領域とを含み、
前記センサデータが、連続的な流れの前記第1の領域に基づく超音波センサからの第1の出力と、非連続的な流れの前記第2の領域に基づく光学センサからの第2の出力とを含み、
前記流体内容物の流れを定量化することが、前記超音波センサからの第1の出力と、前記光学センサからの第2の出力とに基づいて、流量を推定することを含むことを特徴とするシステム。 - 請求項8に記載のシステムにおいて、
前記1つまたは複数のプロセッサによって実行される動作として、前記流体内容物の流れを定量化することが、基準センサデータによって表される基準の流れのトレーニングセットに基づいて候補の流れを定量化するようにトレーニングされた学習機械に前記センサデータを入力することを含み、トレーニングされた前記学習機械が、入力されたセンサデータに基づいて、前記流体内容物の定量化された流れを出力することを特徴とするシステム。 - 導管に結合されたセンサ配列からセンサデータにアクセスするステップであって、該センサ配列は、前記導管を通って流れる流体内容物を通る発光ダイオードから送信される光を検出するように構成された光学センサのアレイを含み、該流体内容物は患者体液を含むものである、ステップと、
前記センサデータの第1の光信号と前記センサデータの第2の光信号とを比較することによって、前記導管を通って流れる前記流体内容物の体積流量を推定するステップであって、該第1の光信号は、前記導管に沿った第1の位置で前記光学センサの第1のものによって検出された光を示し、該第2の光信号は、前記導管に沿った第2の位置で前記光学センサの第2のものによって検出された光を示すものである、ステップと、
前記導管を通って流れる前記流体内容物中の前記患者体液の流体成分の濃度を推定するステップと
を含んでなり、
1つまたは複数のプロセッサにより、前記流体内容物の推定した前記体積流量と前記流体内容物中の流体成分の推定濃度とに基づいて、前記導管を通って流れる前記患者体液を特徴付け、前記体積流量の推定および前記推定濃度の各々は、前記導管に結合された前記光学センサのアレイからの前記センサデータに基づくことを特徴とする方法。 - 結合構成によって導管に結合可能なセンサ配列であって、前記導管を通って流れる患者体液を含む流体内容物を通る発光ダイオードから送信される光を検出するように構成された光学センサのアレイを含み、前記導管を通る前記流体内容物に基づくセンサデータを生成するように構成されたセンサ配列と、
動作を実行するように構成された1つまたは複数のプロセッサと
を含んでなり、
前記動作は、
前記センサ配列から前記センサデータにアクセスする動作と、
前記センサデータの第1の光信号を前記センサデータの第2の光信号と比較することによって、前記導管を通る流体内容物の体積流量を推定する動作であって、前記第1の光信号は、前記導管に沿った第1の位置で前記光学センサの第1のものによって検出された光を示し、前記第2の光信号は、前記導管に沿った第2の位置で光学センサの第2のものによって検出された光を示すものである、動作と、
前記導管を流れる前記流体内容物中の前記患者体液の流体成分の濃度を推定する動作と
を含み、
前記1つまたは複数のプロセッサにより、前記流体内容物の推定した体積流量と前記流体内容物中の流体成分の推定濃度とに基づいて、前記導管を通って流れる前記患者体液を特徴付け、前記体積流量の推定および前記推定濃度の各々は、前記導管に結合された光学センサのアレイからのセンサデータに基づくことを特徴とする、システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862737730P | 2018-09-27 | 2018-09-27 | |
| US62/737,730 | 2018-09-27 | ||
| PCT/US2019/053395 WO2020069278A1 (en) | 2018-09-27 | 2019-09-27 | Systems and methods for inline fluid characterization |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022502653A JP2022502653A (ja) | 2022-01-11 |
| JPWO2020069278A5 JPWO2020069278A5 (ja) | 2022-10-05 |
| JP7470679B2 true JP7470679B2 (ja) | 2024-04-18 |
Family
ID=69953140
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021517568A Active JP7470679B2 (ja) | 2018-09-27 | 2019-09-27 | インライン流体特徴付けシステムおよび方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220008637A1 (ja) |
| EP (1) | EP3856015A4 (ja) |
| JP (1) | JP7470679B2 (ja) |
| CN (1) | CN113382677A (ja) |
| CA (1) | CA3113254A1 (ja) |
| WO (1) | WO2020069278A1 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016187072A1 (en) | 2015-05-15 | 2016-11-24 | Gauss Surgical, Inc. | Methods and systems for characterizing fluids from a patient |
| US20220062535A1 (en) * | 2020-08-27 | 2022-03-03 | Analog Devices, Inc. | Fluid delivery system |
| KR102516080B1 (ko) * | 2020-09-14 | 2023-03-31 | 한국표준과학연구원 | 열식 질량 유량계 |
| CN112232283B (zh) * | 2020-11-05 | 2023-09-01 | 深兰科技(上海)有限公司 | 基于光流和c3d网络的气泡检测方法和系统 |
| DE102021126851A1 (de) * | 2021-10-15 | 2023-04-20 | Elixion Medical GmbH | Einrichtung und Verfahren zum Durchflussbestimmen |
| GB202202309D0 (en) * | 2022-02-21 | 2022-04-06 | Titan Entpr Ltd | Flow meters |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030120306A1 (en) | 2000-04-21 | 2003-06-26 | Vascular Control System | Method and apparatus for the detection and occlusion of blood vessels |
| WO2004100788A1 (en) | 2003-05-14 | 2004-11-25 | Instrumentarium Corporation | Methods, arrangement, device and sensor for urine flow measurement |
| US20050166683A1 (en) | 1999-10-19 | 2005-08-04 | Transonic Systems, Inc. | Method and apparatus to determine an initial flow rate in a conduit |
| US20110009800A1 (en) | 2007-02-06 | 2011-01-13 | Fresenius Medical Care Holdings, Inc. | Dialysis systems including non-invasive multi-function sensor systems |
| US20150254418A1 (en) | 2014-03-05 | 2015-09-10 | Heartflow, Inc. | Methods and systems for predicting sensitivity of blood flow calculations to changes in anatomical geometry |
| JP2016511656A (ja) | 2013-01-24 | 2016-04-21 | グラフトウォークス, エルエルシー | 管腔を通る流動を測定するための方法および装置 |
| US20160335779A1 (en) | 2015-05-15 | 2016-11-17 | Gauss Surgical, Inc. | Methods and systems for characterizing fluids from a patient |
| US20170184433A1 (en) | 2015-12-28 | 2017-06-29 | Sensirion Ag | Flow sensor |
| JP2018512576A (ja) | 2015-02-27 | 2018-05-17 | マッケ カーディオパルモナリー アーゲー | 流体流量測定および気泡検出装置 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4690002A (en) * | 1986-05-14 | 1987-09-01 | Minnesota Minning And Manufacturing Company | Doppler system for measurement of blood flow during cardiopulmonary bypass and ventricular assist |
| JPH02190767A (ja) * | 1989-01-20 | 1990-07-26 | Sankyo Co Ltd | グロビンの定量方法 |
| US20040024296A1 (en) * | 2001-08-27 | 2004-02-05 | Krotkov Eric P. | System, method and computer program product for screening a spectral image |
| US20060189926A1 (en) * | 2005-02-14 | 2006-08-24 | Hall W D | Apparatus and methods for analyzing body fluid samples |
| EP2709520A4 (en) * | 2011-05-17 | 2014-12-10 | Landy Aaron Toth | DEVICES, SYSTEMS AND METHODS FOR EVALUATING IMPLANTS, ORGANS, TRANSPLANTS, FABRICS, SYNTHETIC CONSTRUCTS, VASCULAR GRAFTS, AND THE LIKE |
| US8897523B2 (en) | 2011-07-09 | 2014-11-25 | Gauss Surgical | System and method for counting surgical samples |
| CN109738621B (zh) | 2012-05-14 | 2021-05-11 | 高斯外科公司 | 用于估计液体罐中的血液成分的量的系统和方法 |
| EP3576018B1 (en) * | 2012-05-14 | 2022-03-16 | Gauss Surgical, Inc. | System and methods for managing blood loss of a patient |
| WO2014001977A2 (en) * | 2012-06-28 | 2014-01-03 | Koninklijke Philips N.V. | Fiber optic sensor guided navigation for vascular visualization and monitoring |
| US10424060B2 (en) | 2012-07-09 | 2019-09-24 | Gauss Surgical, Inc. | Method for estimating blood component quantities in surgical textiles |
| WO2015160997A1 (en) | 2014-04-15 | 2015-10-22 | Gauss Surgical, Inc. | Method for estimating a quantity of a blood component in a fluid canister |
| WO2015161003A1 (en) | 2014-04-15 | 2015-10-22 | Gauss Surgical, Inc. | Method for estimating a quantity of a blood component in a fluid canister |
| US9833557B2 (en) * | 2014-12-19 | 2017-12-05 | Fenwal, Inc. | Systems and methods for determining free plasma hemoglobin |
| JP6191977B1 (ja) * | 2016-05-02 | 2017-09-06 | 株式会社トリロバイト | 生体情報測定システム、及び生体情報測定方法 |
| US11229368B2 (en) | 2017-01-13 | 2022-01-25 | Gauss Surgical, Inc. | Fluid loss estimation based on weight of medical items |
-
2019
- 2019-09-27 WO PCT/US2019/053395 patent/WO2020069278A1/en active Search and Examination
- 2019-09-27 CN CN201980077509.7A patent/CN113382677A/zh active Pending
- 2019-09-27 US US17/277,991 patent/US20220008637A1/en active Pending
- 2019-09-27 CA CA3113254A patent/CA3113254A1/en active Pending
- 2019-09-27 JP JP2021517568A patent/JP7470679B2/ja active Active
- 2019-09-27 EP EP19865915.3A patent/EP3856015A4/en active Pending
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20050166683A1 (en) | 1999-10-19 | 2005-08-04 | Transonic Systems, Inc. | Method and apparatus to determine an initial flow rate in a conduit |
| US20030120306A1 (en) | 2000-04-21 | 2003-06-26 | Vascular Control System | Method and apparatus for the detection and occlusion of blood vessels |
| WO2004100788A1 (en) | 2003-05-14 | 2004-11-25 | Instrumentarium Corporation | Methods, arrangement, device and sensor for urine flow measurement |
| US20110009800A1 (en) | 2007-02-06 | 2011-01-13 | Fresenius Medical Care Holdings, Inc. | Dialysis systems including non-invasive multi-function sensor systems |
| JP2016511656A (ja) | 2013-01-24 | 2016-04-21 | グラフトウォークス, エルエルシー | 管腔を通る流動を測定するための方法および装置 |
| US20150254418A1 (en) | 2014-03-05 | 2015-09-10 | Heartflow, Inc. | Methods and systems for predicting sensitivity of blood flow calculations to changes in anatomical geometry |
| JP2018512576A (ja) | 2015-02-27 | 2018-05-17 | マッケ カーディオパルモナリー アーゲー | 流体流量測定および気泡検出装置 |
| US20160335779A1 (en) | 2015-05-15 | 2016-11-17 | Gauss Surgical, Inc. | Methods and systems for characterizing fluids from a patient |
| US20170184433A1 (en) | 2015-12-28 | 2017-06-29 | Sensirion Ag | Flow sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022502653A (ja) | 2022-01-11 |
| WO2020069278A1 (en) | 2020-04-02 |
| CN113382677A (zh) | 2021-09-10 |
| EP3856015A4 (en) | 2022-05-18 |
| CA3113254A1 (en) | 2020-04-02 |
| US20220008637A1 (en) | 2022-01-13 |
| EP3856015A1 (en) | 2021-08-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7470679B2 (ja) | インライン流体特徴付けシステムおよび方法 | |
| US20210267517A1 (en) | Spectrometric content analysis | |
| CN107106095B (zh) | 用于尿液分析的设备、系统及方法 | |
| JP2018533382A5 (ja) | ||
| US11727572B2 (en) | Methods and systems for characterizing fluids from a patient | |
| US11666220B2 (en) | Near-infrared spectroscopy for sensing glycogen in muscle tissue | |
| US11627887B2 (en) | PPG sensor having light arrival angle control at detector | |
| CN103330557B (zh) | 基于曝光时间测定的激光散斑血流成像方法 | |
| CN109314764A (zh) | 用于校准和修正散斑对比流量计的系统和方法 | |
| CN106061385A (zh) | 测量装置和测量方法 | |
| CN110913754A (zh) | 用于非侵入地监测生理测量值的设备、系统和方法 | |
| CN105310697B (zh) | 测量血氧饱和度的方法及装置 | |
| JP2023517797A (ja) | 使用済み透析液を分析するためのシステムおよび方法 | |
| US20170319107A1 (en) | Image-based detection and diagnosis of diastasis recti | |
| EP3716841B1 (en) | Cardiovascular monitoring using multiple sensors | |
| TW202402232A (zh) | 感測器裝置及由多感測器裝置執行的方法 | |
| Yoon et al. | Automated deep learning model for estimating intraoperative blood loss using gauze images | |
| CA3229844A1 (en) | Systems and methods for determining and communicating levels of bilirubin and other subcutaneous substances | |
| Sharma et al. | Remote Health Monitoring System through IoT |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A529 | Written submission of copy of amendment under article 34 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A529 Effective date: 20210521 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20211224 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20220415 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220926 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220926 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20230808 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20230926 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20231226 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20240308 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20240408 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7470679 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |